
Controlled Detection for Micro- and Nanoplastic Spectroscopy/Photometry Integration Using Infrared Radiation


Abstract
1. Introduction
2. Diffraction Grating Theory
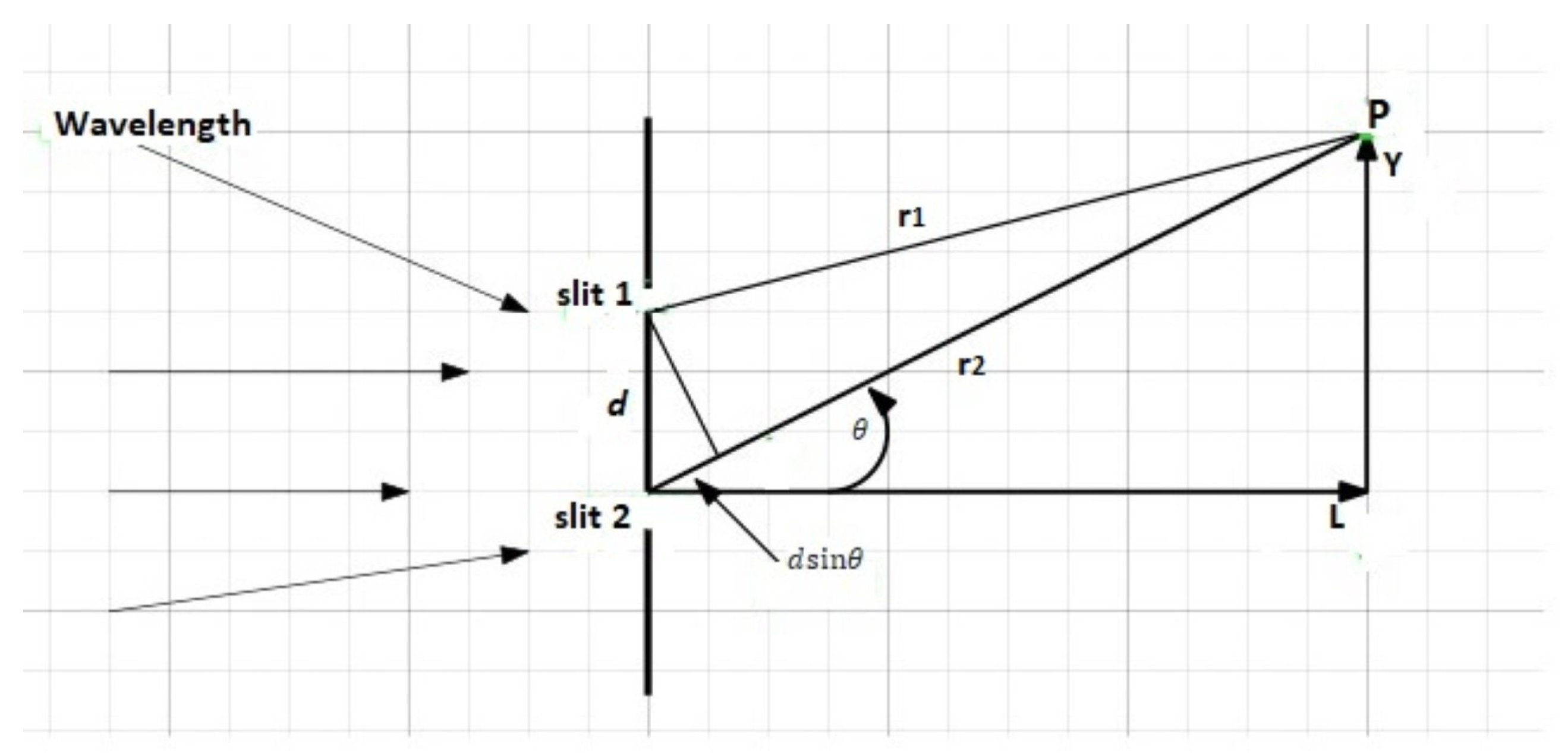
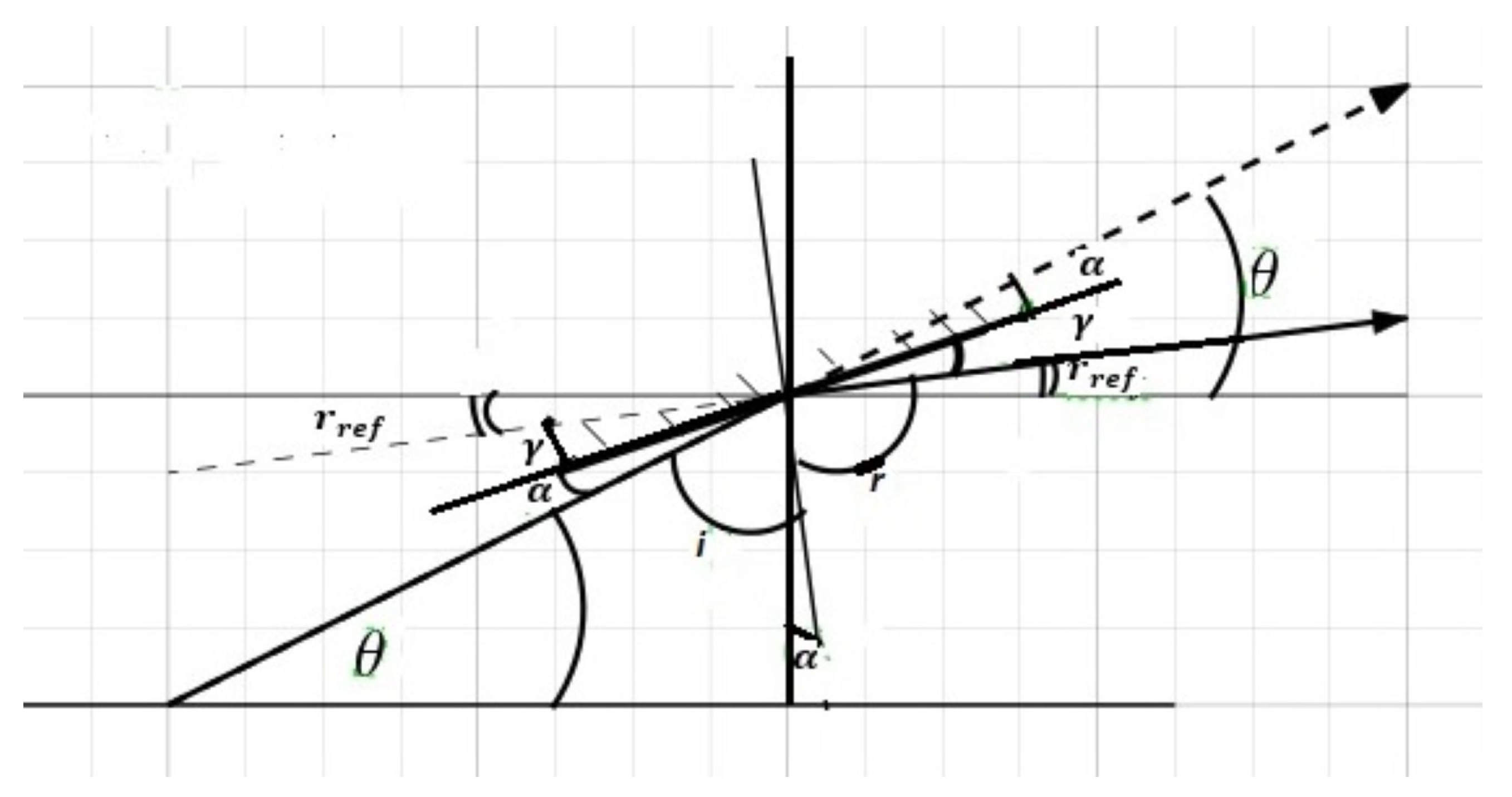
2.1. Diffraction Grating Principle
2.2. Generic Optical Field on the Display Unit
3. Controller Unit
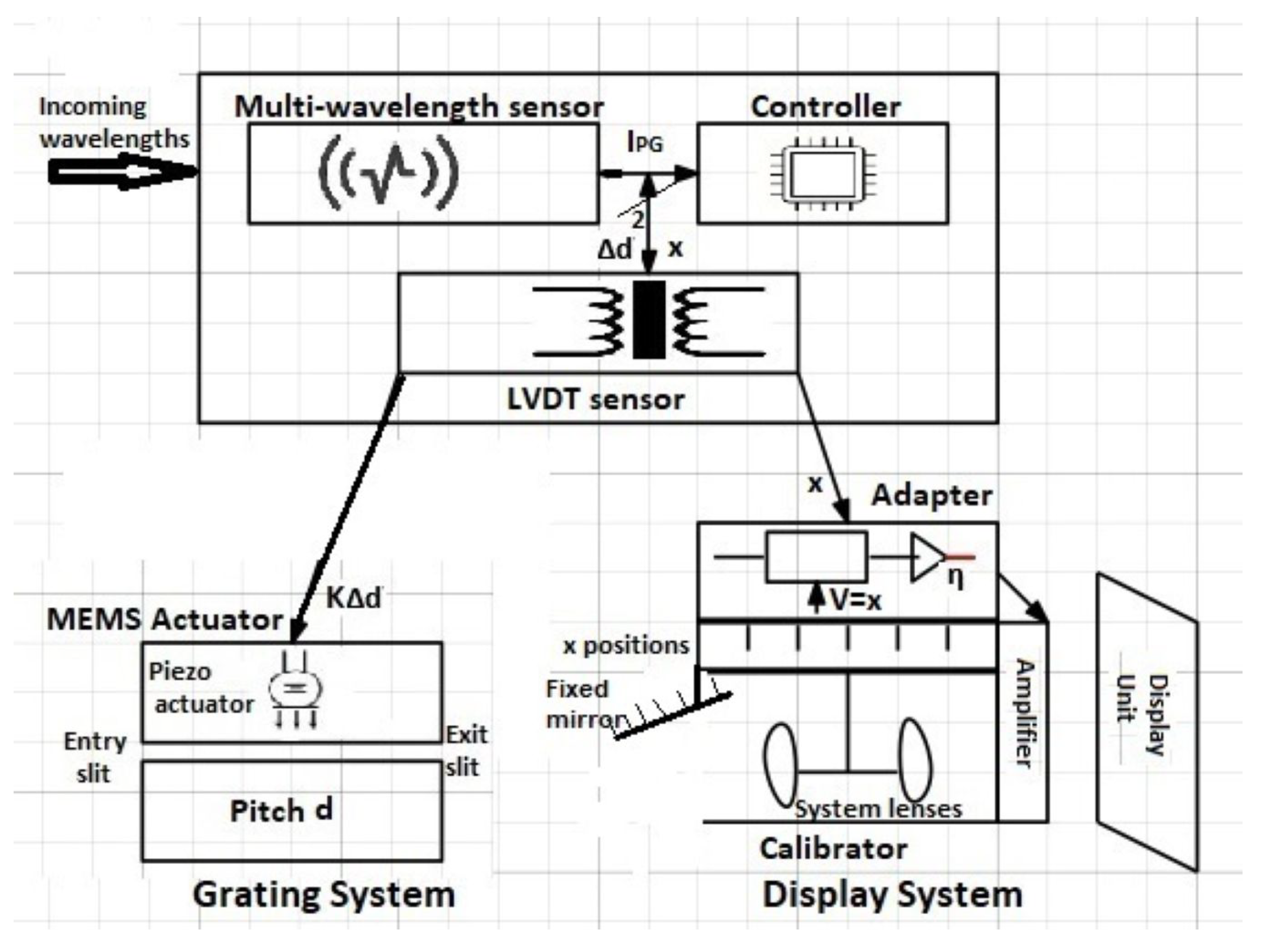
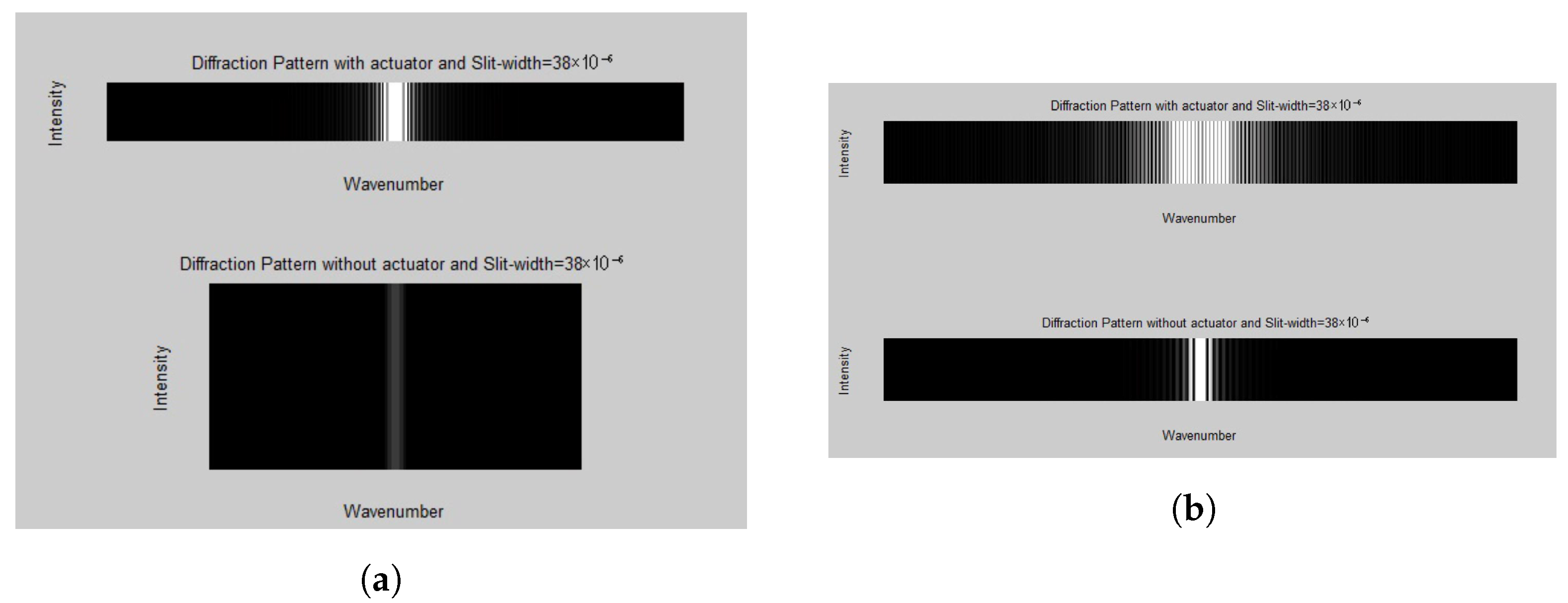
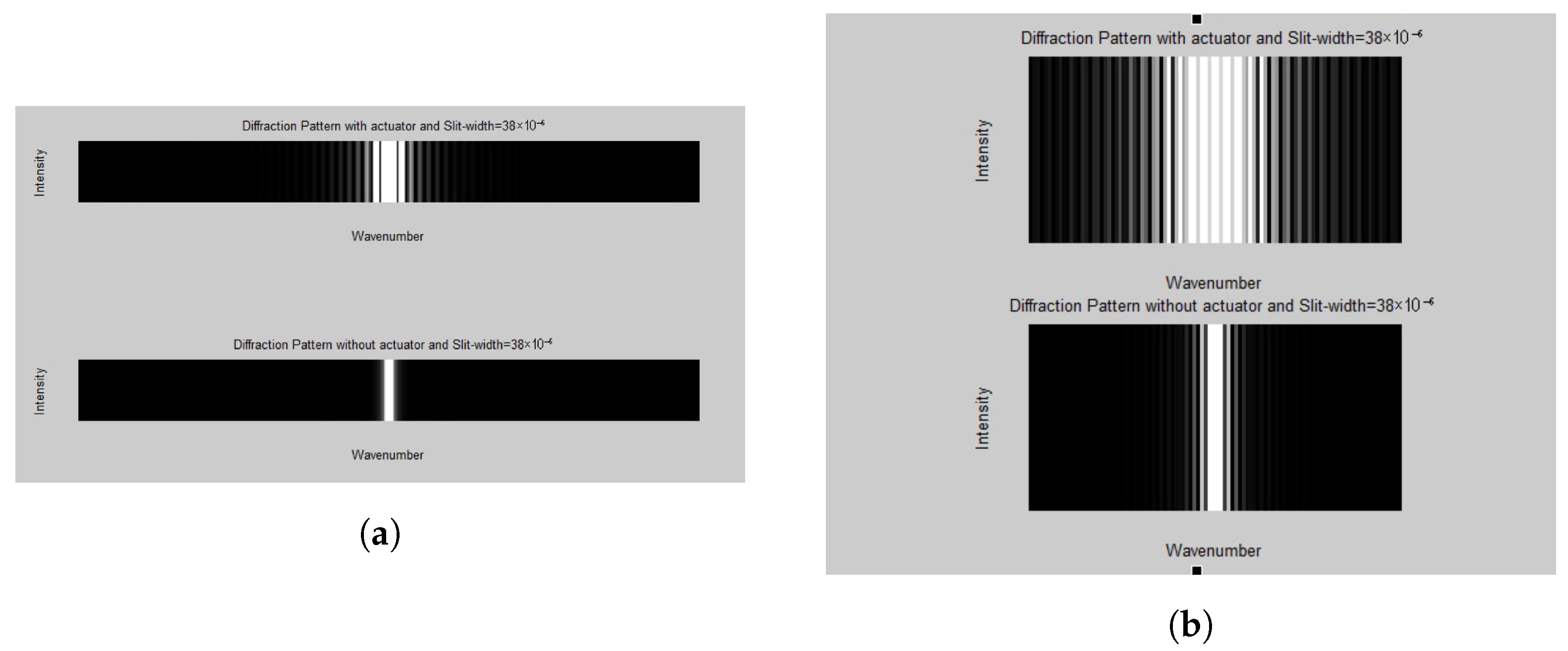
- A dynamic grating actuated by a MEMS piezoelectric actuator, which, through instruction from the control unit, allocates the required slit-width by varying the pitch with a displacement that is meant for a specific incoming wavelength. That incoming wavelength is diffracted with an angle and refracted towards the display unit.
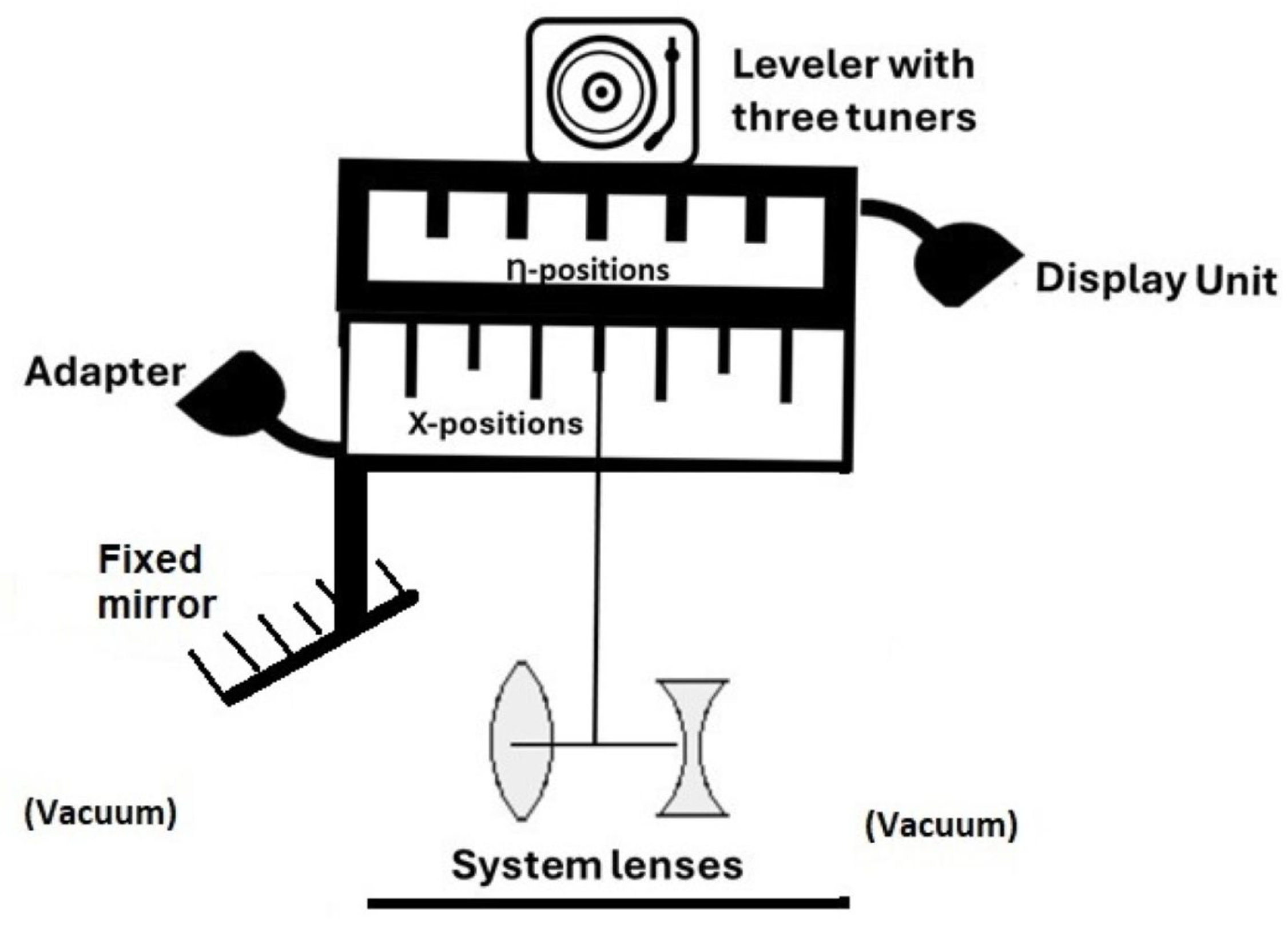
- A display unit, which, under instruction from the control unit, positions the mirror in accordance with the specifications from the controller, such that the diffracted wavelength undergoes a reflection that concentrates the maximum signal in a required geometric etendue to the screen.
- A controller that controls the whole system. The aim is to discard wavelength-dependent devices, and to optimize the intensity on the display unit for a better and accurate imaging, while minimizing the negative impacts from the diffraction grating up to the display unit.
3.1. Controller Devices and Functions
3.2. Characterization of the Controller Functions
3.2.1. Adapter Intensity of the Field on the Display Unit
3.2.2. Calibrator Mirror Characteristics
3.2.3. Display Unit Etendue Optimization
3.3. Grating Pitch Variation Evaluation
Derivation of the Classical Spectrophotometer
4. System, Results, and Simulation
4.1. System Implementation
4.1.1. Source and Sample Characteristics
4.1.2. System Description
4.1.3. System Component Principles and Implementations
- A.
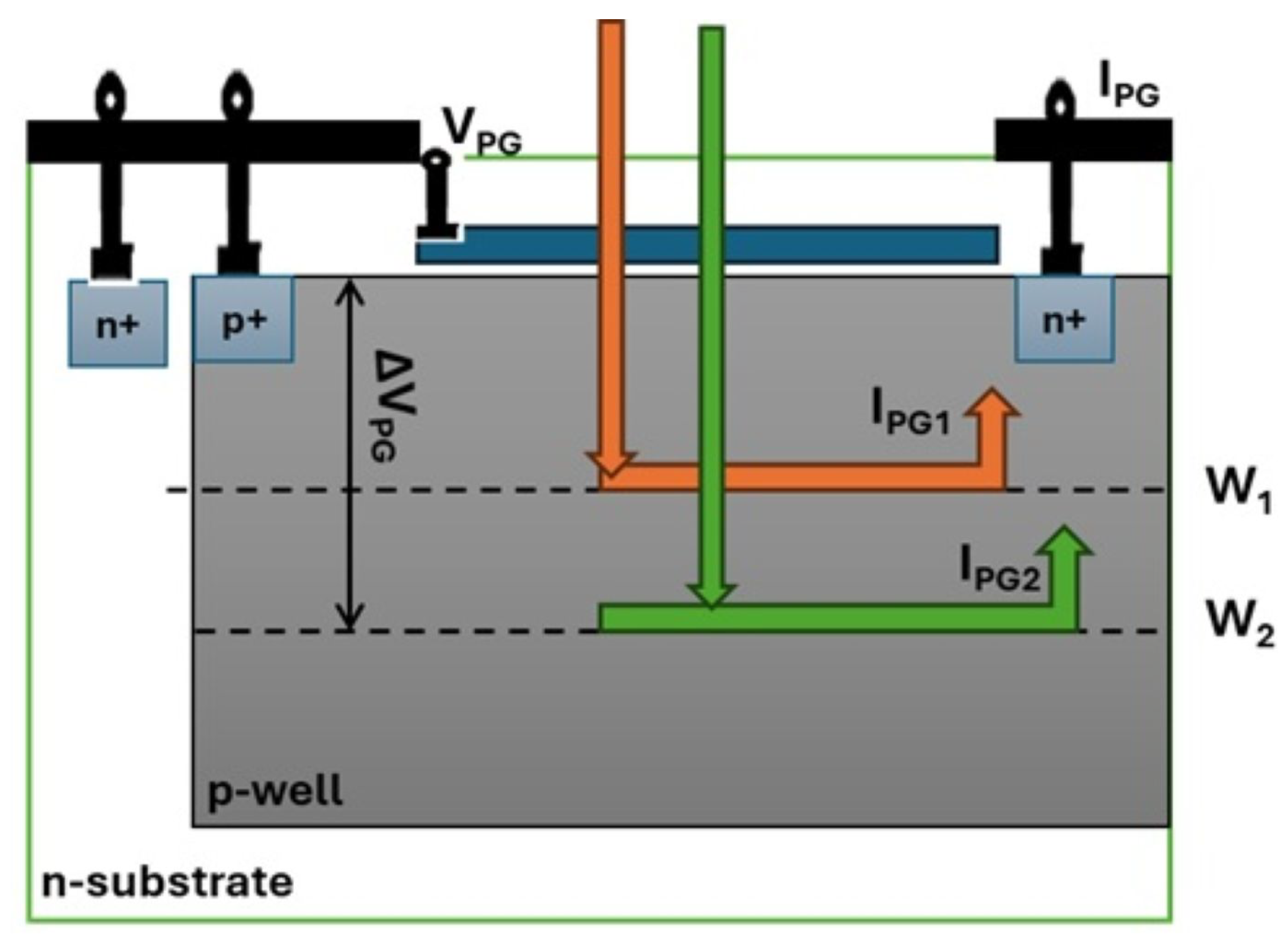
- Multi-wavelength Sensor
- B.
- Controller
- C.
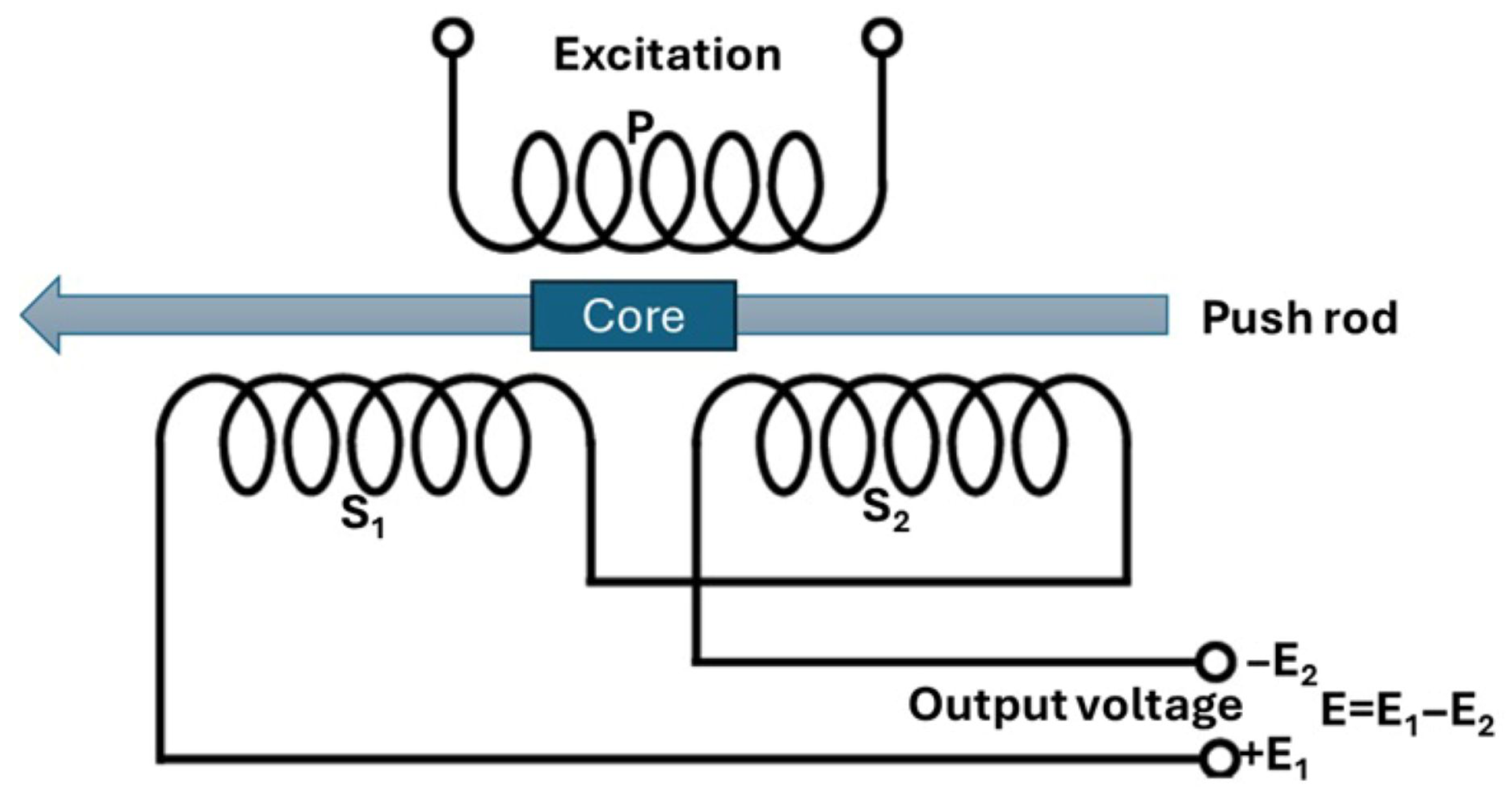
- Linear Variable Differential Transformer Sensor
- D.
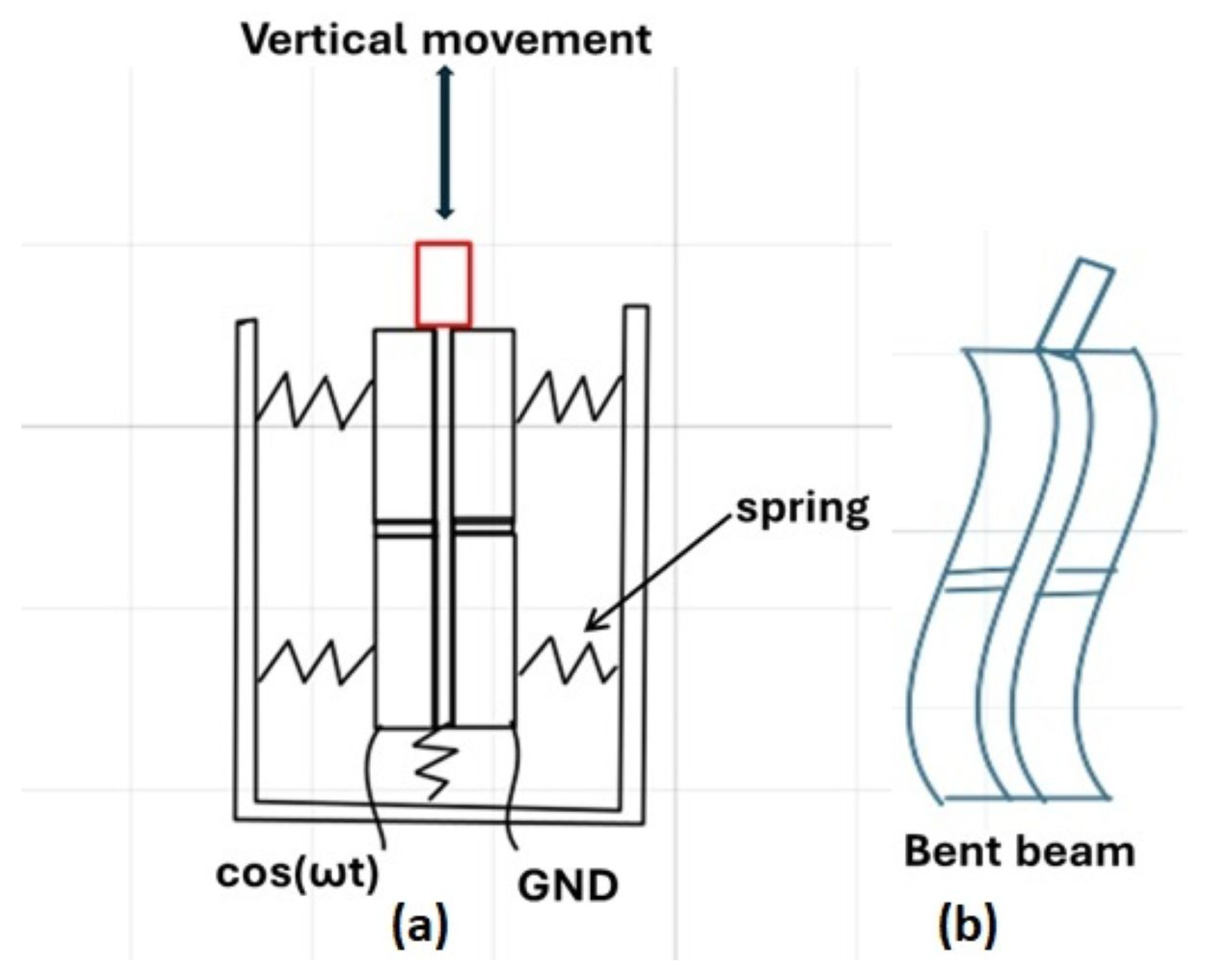
- MEMS Actuator
- The driving power being , since in (22), the required power must satisfy:,being the peak-to-peak voltage, C the capacitance of the piezoelectric element, w is the slit-width, .
- The response time is also very crucial given that ; that is, , which leads to , where is the maximal mechanical energy driving the actuator.The piezo-actuator must be set up such that . , with being the rising time or to fall, which is also the time taken by the actuator to expand or compress up to or revert to the equilibrium.The response time is therefore .
- The capacitance C also varies according to the displacement. Assume that , the initial capacitance characterizing the piezo-material is the initial distance between the two plates, and A the area. When the distance between plates varies, the corresponding capacitance is . Since the displacement of the plates is proportional to the displacement of the actuation , the required capacity, which is , must satisfy .
- E.
- Adapter
- F.
- Calibrator
- G.
- Switch
- H.
- Amplifier
- First, the dimension scale of the geometric etendue: The system is intended to produce images of scale less than 20 , something not yet observed in the existing technologies.
- Simultaneous multi-wavelength capability: The system offers a multi-wavelength capability like the grating rotation, but with the difference that the system adds simultaneity. Simultaneous multi-wavelength scanning is very important in future detection of pathogens retained by some particles, or in determining the correlational during simultaneous emissions in general.
- Range of scanning: Previous scanning technologies are limited to a particular range of the electromagnetic spectrum, which does not encourage the universality of spectroscopy. With our approach, doors are opened for a universal spectroscopy/photometry—that is, spectroscopy/photometry techniques: Raman, fluorescence, Photoluminescence, and Infrared; and spectroscopy/photometry applications: chemical analysis, environmental monitoring, material characterization, forensic analysis, medical diagnostics, and astronomical studies.
- The universality is feasible only if some pivotal devices are not directly wavelength-dependent
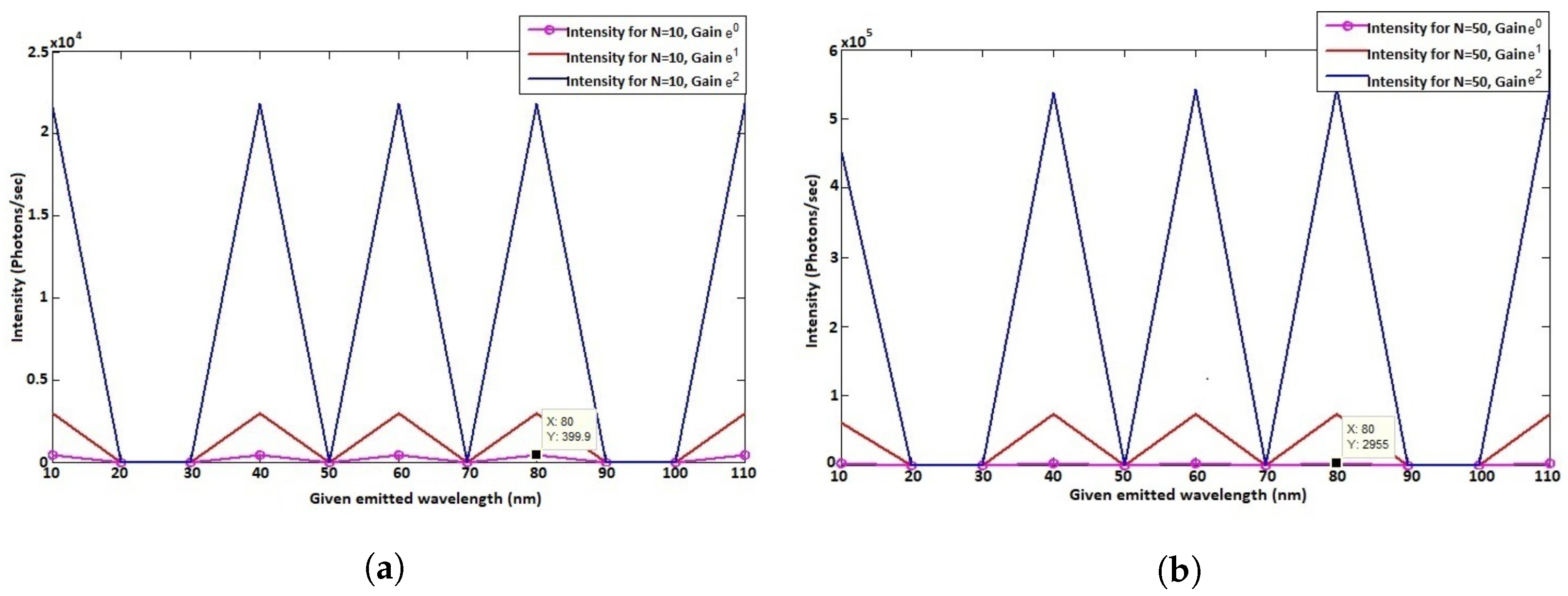
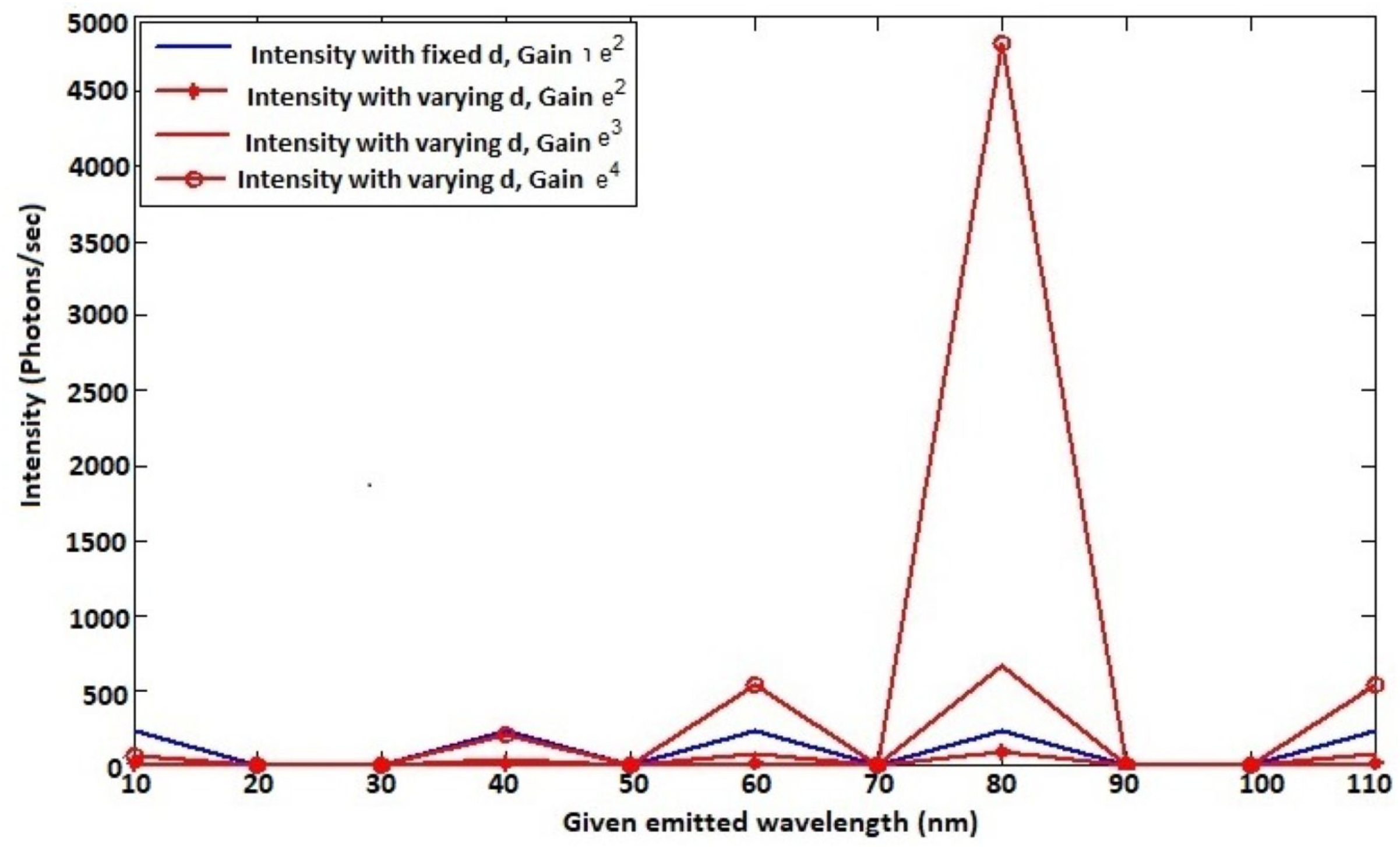
- All the previous grating systems could automatically reach the level of resolution required, relying on the miniaturization of technology for that purpose. However, the current systems experience destructive interferences when the number of slits becomes large. This new system prevents that situation, allowing it to offer a better resolution.
4.2. Analytical Results and Discussions
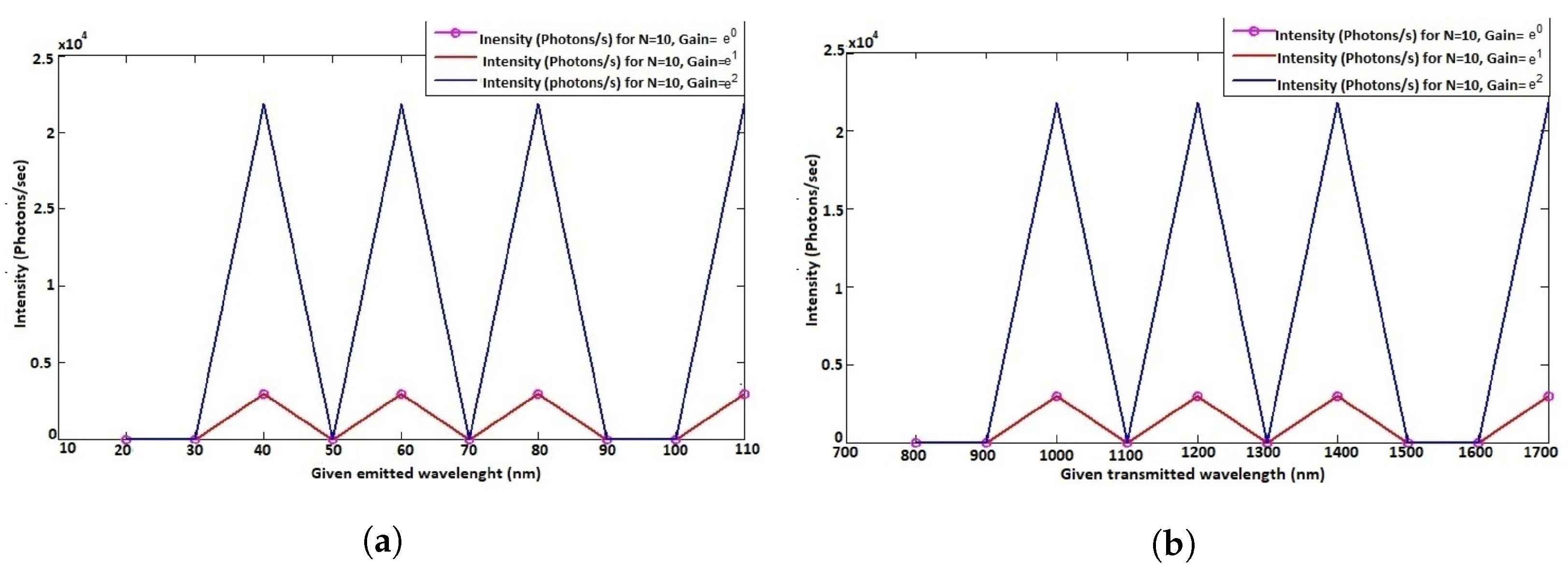
4.3. Simulations of the Results
4.4. System Performance Analysis
4.4.1. The System Efficiency
4.4.2. Signal-to-Noise Ratio
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Yu, K.I.; Yang, Y.; Wang, J.; Hartland, G.V.; Wang, G.P. Nanoparticle–Fluid Interactions at Ultrahigh Acoustic Vibration Frequencies Studied by Femtosecond Time-Resolved Microscopy. ACS Nano 2021, 15, 1833–1840. [Google Scholar] [CrossRef] [PubMed]
- Tian, N.; Zhou, Z.-Y.; Sun, S.-G.; Ding, Y.; Wang, Z.L. Synthesis of Tetrahexahedral Platinum Nanocrystals with High-Index Facets and High Electro-Oxidation Activity. Science 2007, 316, 732–735. [Google Scholar] [CrossRef] [PubMed]
- Dablemont, C.; Lang, P.; Mangeney, C.; Piquemal, J.Y.; Petkov, V.; Herbst, F.; Viau, G. FTIR and XPS synthesizes of Pt Nanoparticle Functionalization and Interaction with Alumina. Langmuir 2008, 24, 5832–5841. [Google Scholar] [CrossRef]
- Magdalini, V.; Charalampia, N.; Natasa, P.K.; Victoria, F.S. Analytical Methods for Nanomaterial Determination in Biological Matrices. Methods Protoc. 2022, 5, 61. [Google Scholar] [CrossRef] [PubMed] [PubMed Central]
- Wetzel, W. Advanced Raman Techniques for Micro- and Nanoplastics Detection. Spectroscopy Online. 2024. Available online: https://www.spectroscopyonline.com (accessed on 24 June 2025).
- Senturia, S.D.; Day, D.R.; Butler, M.A.; Smith, M.C. Programmable diffraction gratings and their uses in displays, spectroscopy, and communications. J. Microlithogr. Microfabr. Microsyst. 2005, 4, 041401. [Google Scholar]
- Schueller, O.J.A.; Duffy, D.C.; Rogers, J.A.; Brittain, S.T.; Whitesides, G.M. Reconfigurable diffraction gratings based on elastomeric microfluidic devices. Sens. Actuators A Phys. 1999, 78, 149–159. [Google Scholar] [CrossRef]
- Wong, C.W.; Jeon, Y.; Barbastathis, G.; Kim, S.G. Analog piezoelectric-driven tunable gratings with nanometer resolution. J. Microelectromech. Syst. 2004, 13, 998–1005. [Google Scholar] [CrossRef]
- Tormen, M.; Peter, Y.A.; Niedermann, P.A.; Hoogerwerf, S.H.; Stanley, R. Deformable MEMS grating for wide tunability and high operating speed. In Proceedings of the MOEMS-MEMS 2006 Micro and Nano-fabrication International Society for Optics and Photonics, Bellingham, WA, USA, 25 January 2006; p. 61140C. [Google Scholar]
- Yang, Y.S.; Lin, Y.H.; Hu, Y.C.; Liu, C.H. A large-displacement thermal actuator designed for MEMS pitch-tunable grating. J. Micromech. Microeng. 2008, 19, 015001. [Google Scholar] [CrossRef]
- Chorążewski, M.; Zajdel, P.; Feng, T.; Luo, D.; Lowe, A.R.; Brown, C.M.; Leão, J.B.; Li, M.; Bleuel, M.; Jensen, G.; et al. Compact Thermal Actuation by Water and Flexible Hydrophobic Nanopor. ACS Nano 2021, 15, 9048–9056. [Google Scholar] [CrossRef]
- Dadi, M.; Yasir, M. Spectroscopy and Spectrophotometry: Principles and Applications for Colorimetric and Related Other Analysis. In Colorimetry; Samanta, A.K., Ed.; InTechOpen: London, UK, 2022. [Google Scholar]
- Chen, C.; Chen, S.; Lobo, R.P.; Maciel-Escudero, C.; Lewin, M.; Taubner, T.; Xiong, W.; Xu, M.; Zhang, X.; Miao, X.; et al. Terahertz Nanoimaging and Nanospectroscopy of Chalcogenide Phase-Change Materials. ACS Photonics 2020, 7, 3499–3506. [Google Scholar] [CrossRef]
- Udvardi, B.; Kovács, I.J.; Fancsik, T.; Kónya, P.; Bátori, M.; Stercel, F.; Falus, G.; Szalai, Z. Effects of Particle Size on the Attenuated Total Reflection Spectrum of Minerals. Appl. Spectrosc. 2017, 71, 1157–1168. [Google Scholar] [CrossRef] [PubMed]
- Meyers, R.A. (Ed.) Encyclopedia of Physical Science and Technology, 3rd ed.; Academic Press Inc.: New York, NY, USA, 2003. [Google Scholar]
- Mille, D.A.B. Huygens’s wave propagation principle corrected. Opt. Lett. 1991, 16, 1370–1372. [Google Scholar] [CrossRef]
- Hecht, E. The Diffraction Grating. In Optics; Pearson: London, UK, 2017; Volume 497. [Google Scholar]
- Diffraction Grating Handbook, Lecture. Available online: https://citeseerx.ist.psu.edu/document?repid=rep1&type=pdf&doi=0953bdcdc08f1b5c1b9dfa199c2156030c3acce3 (accessed on 10 December 2024).
- Yunjie, W.; Haisong, J.; Kiichi, H. Space-mode compressor by using nano-pixel. Jpn. J. Appl. Phys. 2022, 61, SK1022. [Google Scholar] [CrossRef]
- Nanopixel: Promise Thin, Flexible, High-Res Displays. Oxford News 2014, University of Oxford, UK. Available online: https://www.ox.ac.uk/news (accessed on 10 December 2024).
- Nlend, S.; Sune, V.S.; Meyer, J. Characterization of a multilevel micro/nano-plastics Infrared Spectroscopy using optical chopper modulation and induced anti-stokes shift techniques. Results Opt. 2025, 18, 100775. [Google Scholar] [CrossRef]
- Zorabedian, P. Tunable external cavity semiconductor lasers. In Tunable Lasers Handbook; Duarte, F.J., Ed.; Elsevier: New York, NY, USA, 1995; Chapter 8. [Google Scholar]
- Ulrich, E.; Matthias, S.; Tim, P.C.; Jurgen, S. Novel Lasers: Short, shorter, shortest - Diode lasers in the deep ultraviolet Frequency-converted diode lasers provide continuous-wave light down to below 200 nm in the vacuum UV. Laser Focus World 2016, 52, 39–44. Available online: https://www.laserfocusworld.com/ (accessed on 5 May 2025).
- Gruber, G.; Neumayer, M.; Schweighofer Christian Doppler, B.; Leitner, T.; Berger, M.; Klösch, G. Linear Variable Differential Transformer in Harsh Environments—A Displacement and Thermal Study. In Proceedings of the 2023 IEEE International Instrumentation and Measurement Technology Conference (I2MTC), Kuala Lumpur, Malaysia, 13 July 2023. [Google Scholar]
- Haines, J.; Vitali, V.; Bottrill, K.; Naik, P.U.; Gandolfi, M.; De Angelis, C.; Franz, Y.; Lacava, C.; Petropoulos, P.; Guasoni, M. Fabrication of 1 × N integrated power splitters with arbitrary power ratio for single and multimode photonics. Nanophotonics 2024, 13, 339–348. [Google Scholar] [CrossRef]
- Sangjin, H.; Donggeun, R.; Junyung, P.; Hangsik, S. Design of Multiple Wavelength Optical Sensor Module for Depth-Dependent Photoplethysmography. Sensors 2019, 19, 5441. [Google Scholar] [CrossRef]
- Yong Joon, C.; Tsugumi, S.; Kakeru, N.; Mibu, R. Detection of Wavelength Information by Filter-Free Wavelength Sensor and Its Applications. ECS Trans. 2023, 112, 139–146. [Google Scholar]
- Yong-Joon, C.; Kakeru, N.; Tomoya, I.; Tsugumi, S.; Ryosuke, I.; Takeshi, H.; Daisuke, A.; Kazuhiro, T.; Toshihiko, N.; AndKazuaki, S. Demonstrating a Filter-Free Wavelength Sensor with Double-Well Structure and Its Application. Biosensors 2022, 12, 1033. [Google Scholar] [CrossRef]
- Li, C.Y.; Xiao, Y.T.; Fu, C.; Liang, F.X.; Chen, L.M.; Wu, D.; Luo, L.B. High-Accuracy and Broadband Wavelength Sensor with Detection Region Ranging from Deep Ultraviolet to Near Infrared Light. Adv. Optical Mater. 2021, 10, 2101735. [Google Scholar] [CrossRef]
- Jesus, U.; Salvador, H.; David, F.; Daniel, F.H. 3.3 kV PT-IGBT with voltage-sensor monolithically integrated channelled to the photogate by waveguide systems. IET Devices Circuits Syst. 2014, 8, 182–187. [Google Scholar] [CrossRef]
- Luna Innovations, LUNA-Data-Sheet-Micron-os7500. Available online: https://lunainc.com/ (accessed on 5 May 2025).
- Wilson, J.; Bergita, G.M.S.; Martina, P.; Mitra, D. Development of LVDT sensor as land displacement sensor. In Journal of Physics: Conference Series, Proceedings of the 4th International Seminar on Sensors, Instrumentation, Measurement and Metrology, Padang, Indonesia, 14 November 2019; IOP Publishing: Bristol, UK, 2019; Volume 1528. [Google Scholar]
- Monitran Sensors. Available online: https://www.monitran.com/ (accessed on 5 May 2025).
- Damgonovic, D. Material for High Temperature Piezoelectric Transducers Solid State. Mater. Sci. 1998, 3, 469. [Google Scholar]
- Wong, C.W.; Jeon, Y.; Barbastathis, G.; Kim, S.G. Analog tunable gratings driven by thin-film piezoelectric microelectromechanical actuators. Appl. Opt. 2003, 42, 621–626. [Google Scholar] [CrossRef]
- Guangcan, Z.; Zi, H.L.; Yi, Q.; Fook, S.C.; Guangya, Z. MEMS gratings and their applications. Int. J. Optomechatronics 2021, 15, 61–86. [Google Scholar] [CrossRef]
- Abdullah, S.A.; Mohd HMd, K.; John, O.D.; Abdelaziz, Y.A.; Sami, S.A.; Saeed SBa, H.; Mohammed, M.J. A Review of Actuation and Sensing Mechanisms in MEMS-Based Sensor Devices. Nanoscale Res Lett. 2021, 16, 16. [Google Scholar] [CrossRef] [PubMed] [PubMed Central]
- Nanxi, L.; Chong, P.H.; Shiyang, Z.; Yuan, H.F.; Yao, Z.; Lennon, Y.T.L. Aluminium nitride integrated photonics: A review. Nanophotonics 2021, 10, 2347–2387. [Google Scholar]
- Amalia, M.; Markos, P.; Nectarios, V.; Anastasios, P.; Georgios, E.S. Piezoelectric Actuators in Smart Engineering Structures Using Robust Control. Materials 2024, 17, 2357. [Google Scholar] [CrossRef]
- Thomas, E.S. Effect of Doping in Aluminium Nitride Nanomaterials: A review. Microsyst. Nanotechnol. 2021, 107, 15229. [Google Scholar] [CrossRef]
- Slide Switches. Available online: https://www.digikey.co.za/ (accessed on 3 May 2025).
- Scott, K.; Lacra, P.; Stewart Aitchison, J. Controlling a Semiconductor Optical Amplifier Using a State-Space Model. IEEE J. Quantum Electron. 2007, 43, 123–129. [Google Scholar] [CrossRef]
- Bradrick, T.D.; Churchich, J.E. Spectrophotometry and Spectrofluorimetry: A Practical Approach; Gore, M., Ed.; OUP Oxford: Oxford, UK, 2000; p. 225. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Classical | Calibrator | At | |
|---|---|---|---|
| Etendue | 500 | 1000 | 1500 () |
| Image size | 80 | 113 | 138 () |
| New | Calibrator | at | (New) |
| Etendue | 0.179 | 4.476 | 8.772 () |
| Image size | 0.478 | 2.387 | 3.342 (nm) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nlend, S.; Solms, S.V.; Meyer, J. Controlled Detection for Micro- and Nanoplastic Spectroscopy/Photometry Integration Using Infrared Radiation. Optics 2025, 6, 30. https://doi.org/10.3390/opt6030030
Nlend S, Solms SV, Meyer J. Controlled Detection for Micro- and Nanoplastic Spectroscopy/Photometry Integration Using Infrared Radiation. Optics. 2025; 6(3):30. https://doi.org/10.3390/opt6030030
Chicago/Turabian StyleNlend, Samuel, Sune Von Solms, and Johann Meyer. 2025. "Controlled Detection for Micro- and Nanoplastic Spectroscopy/Photometry Integration Using Infrared Radiation" Optics 6, no. 3: 30. https://doi.org/10.3390/opt6030030
APA StyleNlend, S., Solms, S. V., & Meyer, J. (2025). Controlled Detection for Micro- and Nanoplastic Spectroscopy/Photometry Integration Using Infrared Radiation. Optics, 6(3), 30. https://doi.org/10.3390/opt6030030