In engineering mechanics, there are idealized 1D models, such as rods or beams, as well as 2D models, such as shells and plates. In particular, the beam represents a high abstraction of a 3D body consisting of a curve and a cross-section. These cross-sections usually consist of the composition of different 2D geometric objects such as circles, ellipses, rectangles, or triangles [
1], leading, for example, to cross-sections such as U, T, H, I, or tube sections. Structural optimization for such wireframe structures can be applied to the element stiffness matrix of a beam by changing the moments of area [
2,
3,
4] or accounting parameters for specific types of cross-sections [
5,
6]. While such cross-sections are typically found in frame structures such as cars, buses, or bridges, the results of topology optimization tend to result in root-shaped geometric freeform bodies [
2]. Visually, the results provided by topology optimization considering plate or volumetric elements often lead to organic shapes [
7], which can be interpreted as beams with circular or elliptical cross-sections [
8,
9]. Alternatively, freeform surfaces can be selected manually [
10,
11] or estimated automatically [
12,
13] for such optimization results.
Freeform curves in particular offer the advantage of high shape variation and are especially well suited for the reconstruction of organic models. Such a freeform cross-section consists of a so-called control polygon [
14], with which the spline can be adjusted and controlled. A significant advantage is that such cross-sections can be used to derive a frame structure consisting of several beams to a closed freeform surface model. These control polygons of the individual beams can be linked to form a comprehensive control mesh [
15]. In contrast to the unification of cylinders or spheres by means of constructive solid geometry, this results in a continuous surface. Furthermore, such a control polygon can be parametrized and further applied for shape reconstruction and wireframe optimization [
15]. Thus, it is highly desirable to investigate the geometric properties of such a basis spline (B-splines) defined by a parametric representation.
1.1. Motivation
The advantage of constructive solid geometry (CSG) derived from circular and elliptical cross-sections includes the parametric representation of the curve and the moments of area, which are necessary for the evaluation of the bending stiffness as well as for FE simulations. For freeform cross-sections, the calculation of the moments is usually performed in a large number of numerically treated point coordinates, where they are determined via a boundary integral. In a recent publication [
15], instead of a numerical calculation approach, a parametric formula was derived analytically, e.g., for the area of a triangle and rectangle control polygon.
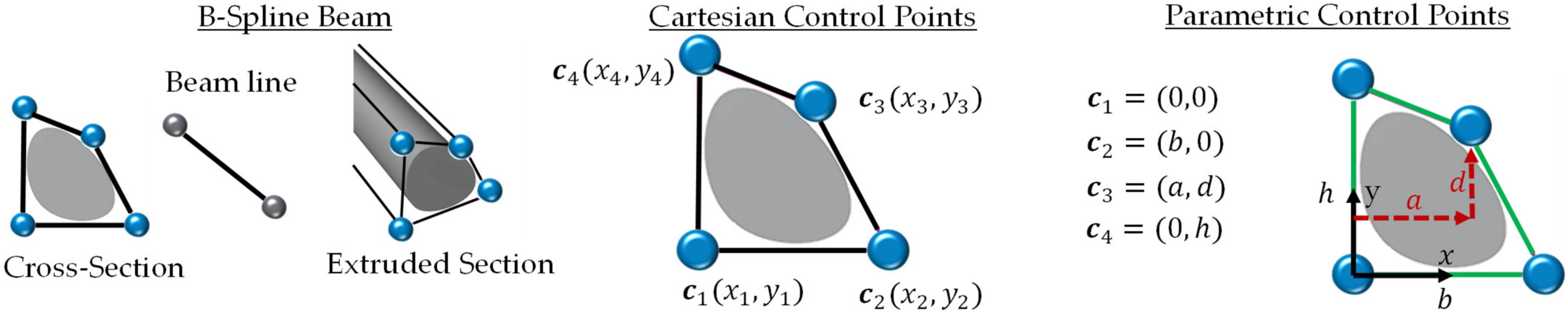
Figure 1 shows the example of a bar with Cartesian coordinates and with a parametric of the control polygon of a B-spline.
However, since, in [
15], only a triangle and a rectangle are considered and a numerical estimation of the coefficients of the second moments of area is carried out, a parametric description of the moments of area is analyzed in the context of this work. On one hand, the zero- and second-order moments of area are determined analytically, and, on the other hand, in addition to the triangle and rectangle, various control polygons, such as the moments of area of a parallelogram, a trapeze, a symmetric pentagon, and a symmetric hexagon control polygon, are derived.
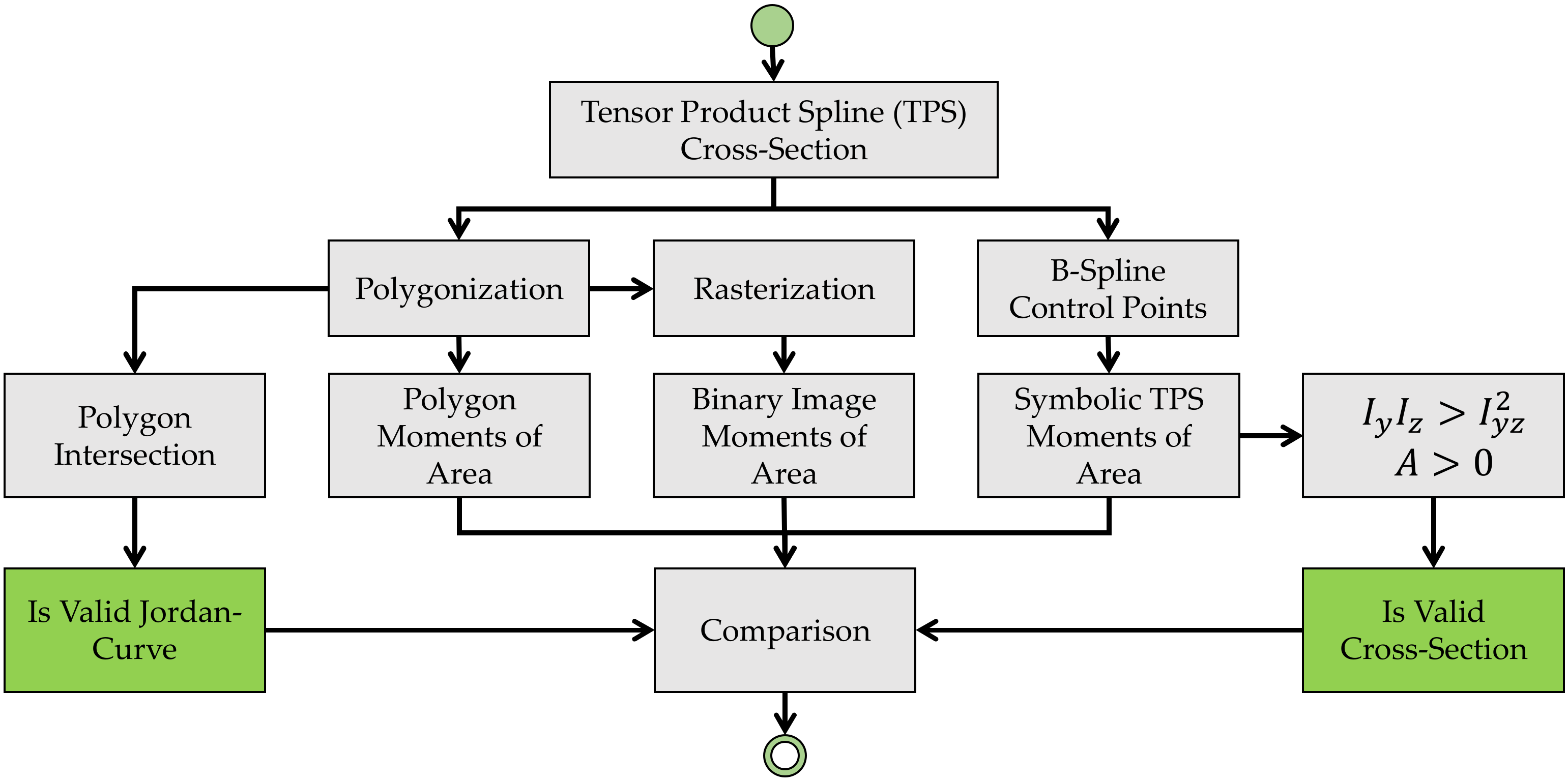
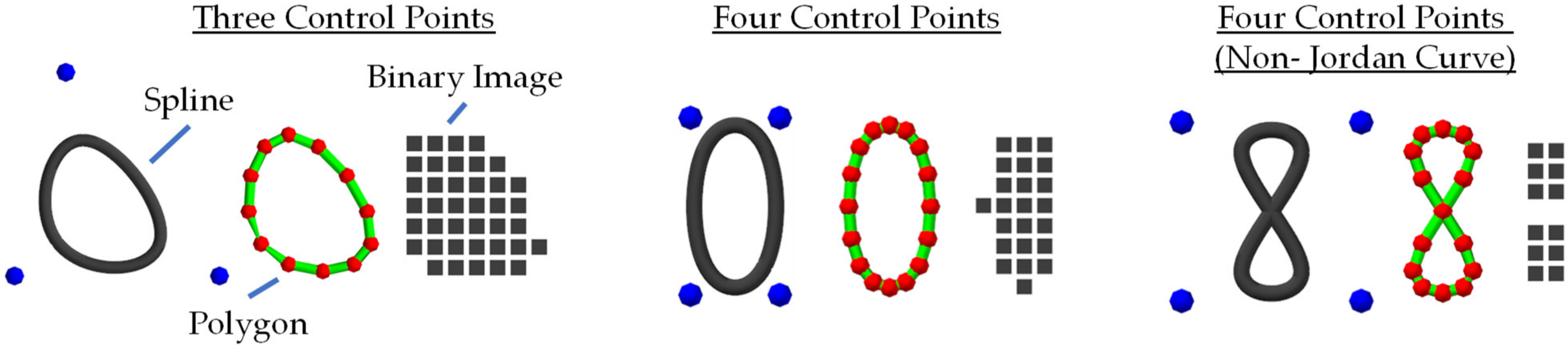
In addition to the determination of the equations for the moments, an extensive validation strategy is presented. First, the formulas are checked against correlations of valid cross-sections, so that, for example, the cross-sectional area must always be greater than 0. Then, the freeform curves are converted into polygons by an appropriate choice of control points and compared with results from the literature using a triangle and a rectangle as examples. Finally, a numerical comparison of the moments of area is performed with alternative calculation methods of the moments of polygons as well as of 2D binary images. This validation can be used to ensure the validity of the automatically calculated formulas.
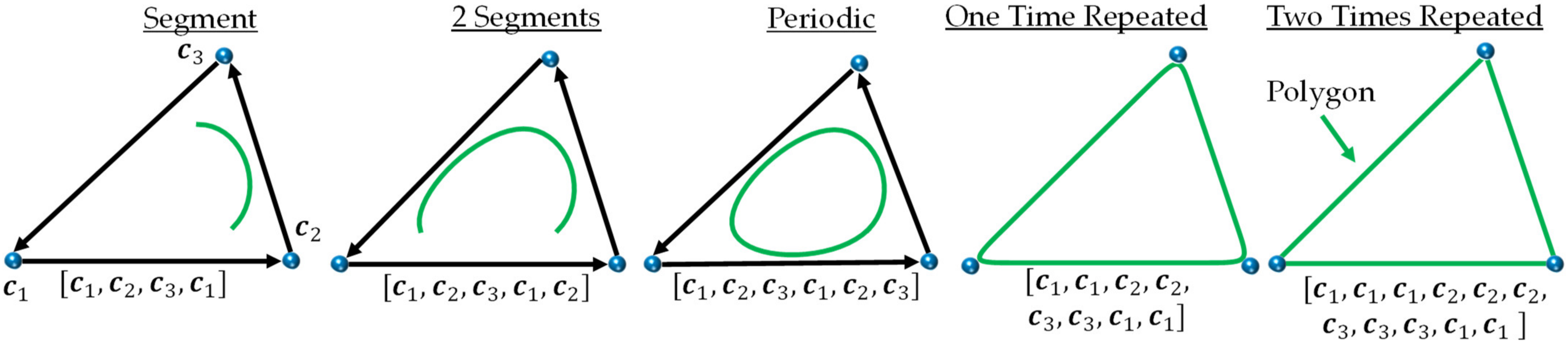
In the following, the properties and the methods for the determination of the moments of area of periodic splines are described. Then, alternative methods for calculating moments of polygons and images are explained. Finally, the essential parameters of moments are described.
1.2. State of the Art
The parametric representation of various shapes and topologies has been discussed in various articles for simple polygons as common cross-section types [
16,
17] and also for more complex topologies consisting of multiple polygons such as hexagonal networks [
18,
19]. The knot positions of these for one or several polygons can be considered as control points for tensor product splines.
There are several different kinds of splines such as the Overhauser spline [
20,
21], the Catmull–Rom spline [
22], B-splines [
23], and Bezier splines [
24]. These different spline types may differ in properties such as the convex hull criterion or the type of continuity [
25]. The convex hull criterion describes the property in which, given a convex control polygon, the resulting spline lies within that control polygon. While B-splines provide
continuity and the convex hull criterion, Bezier curves only guarantee
continuity and the convex hull criterion [
25]. Catmull–Rom splines are only
continuous and violate the convex hull criterion [
25]. The Catmull–Rom spline and the Bezier spline offer. in contrast to B-splines. the advantage that the control points are located on the curve. Due to the convex criterion and the
continuity, this article focuses on B-splines. Such a cross-section can be used to describe 3D surfaces by using operations, such as skinning or sweeping, along a curve [
26] to design, for example, a propeller blade [
27]. Furthermore, B-splines can be used to model the mechanical behavior of a beam [
15,
28]. Additionally, they can be used in the structural optimization of lattices [
15,
29,
30,
31], so that the beam line or its cross-section changes due to some objective function.
The calculation of the moments of freeform curves has been performed in several publications [
32,
33,
34]. The calculation is carried out via the boundary integral along the spline using Green’s Theorem in order to be able to calculate the moments of area directly [
32,
33]. This boundary integral can be traced back to a summation of the individual points, including weighting factors. The authors of [
32] compared their equations using several B-splines to approximate the ellipse against the exact moments of area. While the authors of [
32,
33] considered the calculation on 2D shapes, the authors of [
35] calculated the moment of inertia for the 3D shapes of freeform surfaces instead. Such moments of area, particularly for splines, are often used for shape matching [
36,
37] due to the invariant properties.
However, since this summation has a large number of coefficients, a more compact parametric description is often desirable. The authors of [
15] were able to find an exact parametric description of triangles and rectangles for the value of the cross-sectional area, the formula of which was subsequently used for the truss optimization as well as the 3D reconstruction. In this work, analogous to [
15], such a compact description shall be found for different control polygons and for different types of splines. In contrast to [
15], a complete analytical description of the second order of the moments of area, as well as the transfer to control polygons consisting of a parallelogram, a trapeze, a symmetric pentagon, and a symmetric hexagon, is guaranteed.
In addition to the numerical calculation of spline cross-sections, alternative geometric representations such as a polygon or an image can also be used. The moments of binary images were investigated in several articles such as [
16,
38]. By summing up the single pixels to a rectangle, the area can be calculated by considering Steiner’s theorem and the center of area, and the second moments of area can be calculated with the following equations [
16]:
For polygonal cross-sections, the moments of area with respect to the center of area can be determined with the following equations [
39,
40]:
Typically, cross-sections can be converted from algebraic curves to images or polygons directly. Therefore, it is reasonable to cross-validate the new equations to the alternative representations using Equations (1) and (2). While the equations of the polygon cross-section are determined by a boundary integration, the equations for the binary image were determined by an area integration. While these numerical approximations of the moments of area can be computed quite quickly, the main advantage of parametric cross-sections is their interpretability and direct use in algebraic equations. For example, the beam stiffness matrix can be constructed directly using the parametric spline description, which can be further optimized [
15].








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}

















