2.1. Postulates
While in the QM path integral and in Hamilton’s problem of minimizing classical action, time is treated as an external parameter upon which the coordinates depend, in the field of signal processing, temporal data are processed in the same manner as spatial data. The two postulates presented here frame QWP using the tools of signal processing.
Postulate 1. The state of a system is completely characterized by wave distributions Ψ and in complex-valued dual 3+1D spaces parameterized by and , respectively.
This is the equivalent of a QM wavefunction. By “system”, it is meant some signal which represents an unspecified physical entity—for instance, a Gaussian wavepacket. Next, the convolution theorem can be expressed in two ways, between which the dual spaces are swapped:
where
is a given 3+1D signal, “tilde” indicates the distribution in
-space, and
is the Fourier transform (or, in the general case, another appropriately chosen integral transform).
Postulate 2. Together, the dual spaces comprise a complete description of the dynamical interactions between systems, obtained through convolution in either of the spaces.
For instance, in
-space (Note that the second line in Equation (
3) is a special case when the distributions
and
are unitary and can therefore be written as complex exponential distributions.)
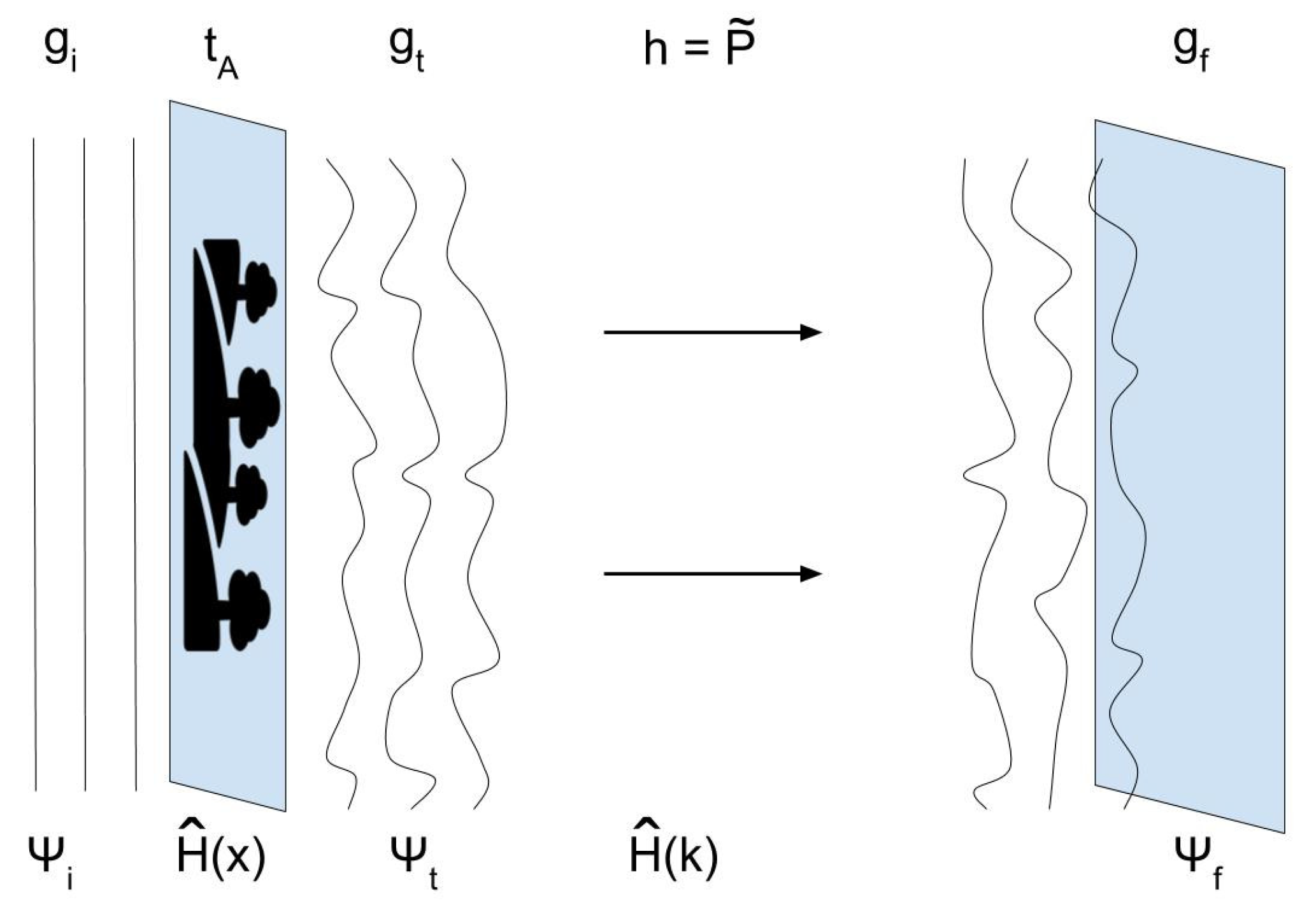
The sign conventions of
and
are chosen for convenience,
h is an impulse response signal responsible for propagation through a medium,
is a spatially dependent signal known as the amplitude transmittance function or aperture function (see Goodman [
22]), and
is the original signal.
The central insight is that a 3+1D distribution cannot evolve with respect to time and thus the requirement that equals .
This accomplishes the first of our goals, to state a formalization of QWP in terms of SDT and convolutions. Now, we will undertake our second goal, to distinguish between “parameters” and “coordinate intervals”.
2.2. Distinguishing Parameters from Coordinate Intervals
In 3+1D distributions, one cannot define a specific “now” or “privileged present” in -space. This is true in special relativity as well, but for a different reason. Here, we present a novel argument against the “now” which leads us to distinguish between two sets of symbols–parameters and coordinate intervals–for describing spacetime and the 3+1D frequency domain.
Consider the conversion of a sound into the frequency domain. Through application of the Fourier transform, one removes the explicit time dependence of a sound signal. Therefore, a sound file represented in the frequency domain cannot be time-sliced, for a given location in that file corresponds to a given frequency but has no association with a specific time. A slice therefore does not give a recognizable description of any part of the original sound. However, it is well known that the time sequencing information is still present, encoded into the phase profile of the signal, and that it can be extracted through an inverse Fourier transform.
Similarly,
-space is not parameterized by time, since the Fourier transform integrates out the time dependency. A given
-space distribution therefore cannot be associated with a particular moment in time. (Granted, one can define a 3D hypersurface in
-space at a specific time using a
-function in time, for instance
but the resulting
-space distribution has been transformed into a usual 3D wavefunction whose time dependence is the usual complex exponential dependent on a coordinate interval
rather than a parameter
t. To remain in the 3+1D formulation, one must avoid this “time-slice” into hypersurfaces. This comes at the expense of losing a meaningful notion of “present moment” and with the benefit of retaining information that may lead to new physics.)
Thus, on the one hand, in X-ray crystallography or in magnetic resonance imaging, the “reciprocal lattice” in 3D -space is used to describe the system, and a specific 3D -space distribution can be associated with each moment in time because no transform has been performed in the time domain.
However, on the other hand, what will happen to the 3+1D -space as time evolves? It is clear that the 3+1D -space distribution cannot evolve with time because the time dependency has been integrated out. Rather, a 3+1D -space distribution that is “static” can encode dynamical information about -space within it. This is a restatement of Postulate 2, that .
Thus, any measurable notion of time must not be considered continuous, but rather advance in discrete steps at each moment of interaction. This is because measurement is governed by convolution, which is a discrete process applied at a particular moment. Consider the analogous process of image propagation. To display an image involves a Fourier transform (e.g., a lens) to transform the frequency data into the spatial domain. A setup may have multiple lenses, but never half a lens, because one cannot take half of a Fourier transform and obtain a focused image. In the same way, our notion of measurable time must advance discretely with each successive interaction, during which convolution occurs.
As a counter-example, consider a Gaussian wavepacket with 4-momentum
, whose
-space representation is also Gaussian and is offset from the origin by (
,
),
In -space, information about motion in space is encoded into the value of . Alternately, there could be position information encoded as a linear phase into . However, what is clear is that the distribution is not changing with time, it simply encodes that the particle has energy . If time were to be thought of as evolving continuously in x-space, this would require continually changing -space, either in phase or in amplitude. One might imagine those changing but should keep in mind that the coordinates and are frequencies in that space, not parameters. Changing them would imply reference to another parameter, an external time. Instead, measurable time only exists in k-space when passed as a reference from x-space during a Fourier transform (i.e., an interaction). However, in that case, neither space nor time can have a continual value in either space. They have values only for a given instance of the convolution operation.
Motion can be encoded within a static 3+1D -space distribution by distinguishing between the parameters (of integration) of a space and the coordinate intervals (or just coordinates or intervals) between interaction events in the space. Coordinate intervals are associated with interaction events, are measurable, and always have finite values. Parameters are associated with the Fourier integrations in Postulate 2, are unmeasurable, and always have an infinite domain. Parameters are simply dummy variables (x, t, , ) which are necessary to convert between the dual spaces, whereas coordinate intervals (labeled with an index in parenthesis, , , , ) are the specific measured transitions in space, time, momentum, or energy between interaction events. In the path integral formulation of QM, this distinction exists but it is not emphasized, as shall be shown.
To picture the distinction between parameters and intervals, it can be useful to think about an image on a holographic film. A hologram is made of interference patterns capturing the phase from 2D -space onto film in 2D -space. What makes a hologram interesting is that these 2D interference patterns generate an image with apparent 3D coordinates. When one’s vantage point on a hologram changes, the image appears to move relative to the film, i.e., the coordinates (, ) of the image change, but the interference pattern on the film (described with parameters x and y) does not. In a hologram, as in the theory presented here, measurable events are described by coordinates which evolve according to constraints encoded into the interference pattern described by parameters.
In the standard quantum formalism, the distinction between parameters and coordinate intervals exists but is underemphasized. As an explicit example, consider the
momentum–space energy eigenstate of a “particle in a box,” of the form
The position parameter from the position space wavefunction has been Fourier transformed to the parameter
k, but a time-slice has been performed in the time domain so that there are no
t or
parameters in the expression. Instead, they appear as
coordinate intervals in a global phase factor
, where
is “measurable time”. The quantities
and
L are also
coordinate intervals representing the (measurable) center of the box and its width, respectively. Thus, the expression in Equation (
6) is dependent only on the parameter
k and is written in
-space.
Having made the distinction between what is measurable and what is unmeasurable in the formalism, we now examine how to obtain a dynamical spacetime description—an equation of motion—from within a static 3+1D -space.
2.3. Spacetime Paths as a Whole
Next, it will be shown that obtaining an equation of motion or dynamical mode from -space leads to a novel view of a spacetime path as a whole, and clarity will be gained on what this means.
The phases
and
in Equation (
3) contain crucial dynamical information. The term “phase map” will be introduced here for these distributions. Consider example phase maps in
-space (resp.
-space),
where
and
(resp.
x and
t) are (unmeasurable) parameters and
and
(resp.
and
) are coordinate intervals corresponding to an interaction. The coordinate intervals
and
describe the “frequencies” of a plane wave in
-space (often called “spatial frequencies”). The interference patterns in the
-space distribution therefore encode information about the spatial coordinate intervals of an event in
-space. Similarly, the interference patterns in the
-space distribution encode information about the values of 4-momentum (
and
) of each interaction event.
The 3+1D
-space is similar but not identical to the well-known block universe model from relativity theory. Price remarks, “People sometimes say that the block universe is
static. This is rather misleading, however, as it suggests that there is a time frame in which the four-dimensional block universe stays the same.” Because time is included within the block, “it is just as wrong to call it static as it is to call it dynamic or changeable” [
35].
The block universe presented here does not resemble physical trajectories through spacetime but instead looks like the interference patterns of a complex field which encode such trajectories. These waves in -space and -space are invariant with respect to their parameters, so they do not "wave" in time. However, the measurable coordinate values , of sequential interaction events can evolve in a way which leaves the overall distributions unchanged. A system evolves due to discrete interactions only by coordinate intervals which leave the block universe unchanged. These are spacetime paths as a whole.
This will now be demonstrated for a simple plane wave disturbance of momentum
,
interacting with an ideal localizing detector,
, with no external potential. Inserting these signals into Equation (
1) yields
where the shift property of the Fourier transform and the specific Fourier transform pair
were used.
We derive an equation of motion by noting that
a 3+1D distribution cannot evolve, thus setting and setting global phase factors to unity. Setting the phase in Equations (
9) and (
10) equal, we obtain
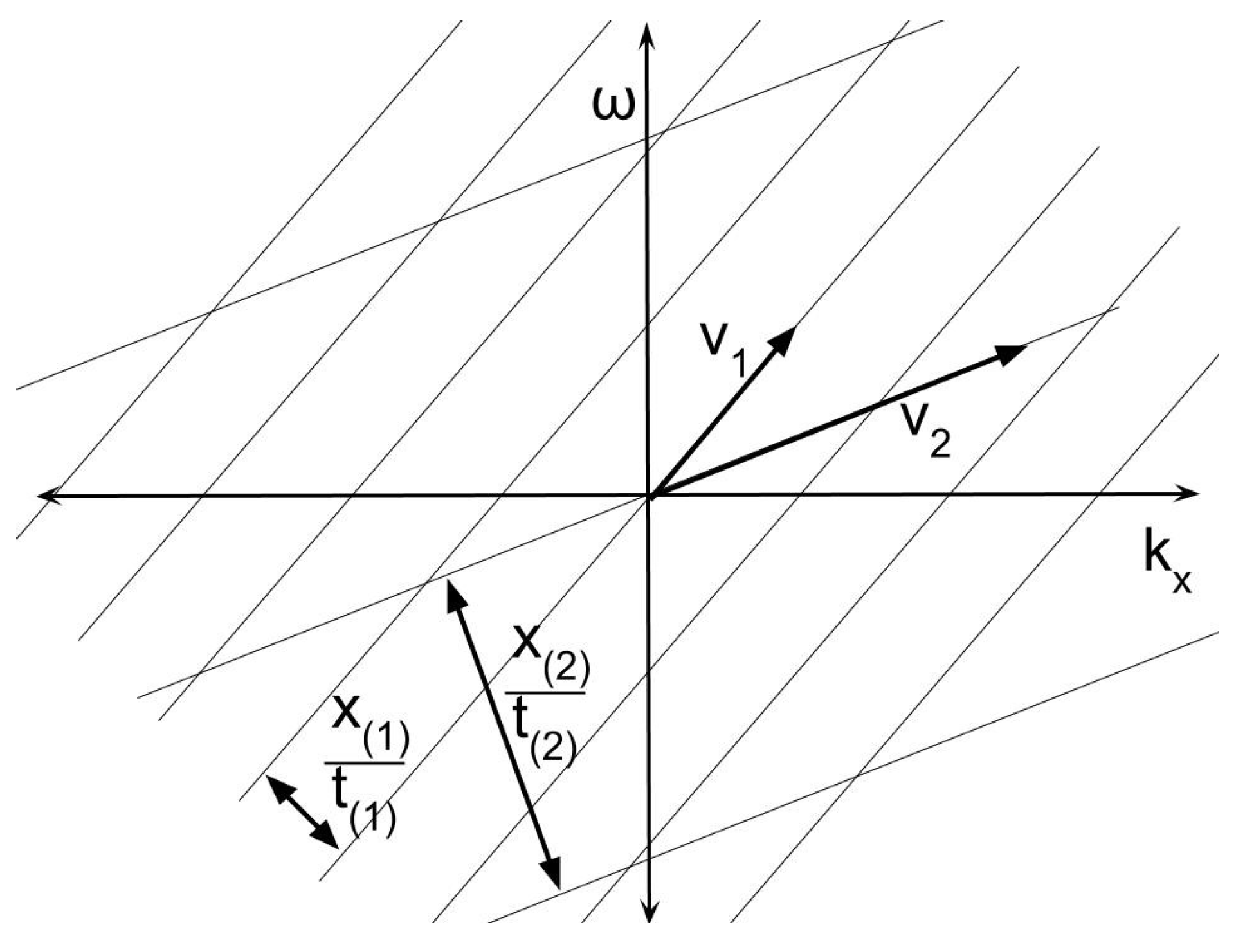
The allowable coordinate intervals (
,
) at which a detection event will be successful are along a path of rectilinear motion with a constant velocity
, as expected for a free system. (
and
are the “last measured” coordinate intervals of energy and momentum.)
Figure 1 illustrates this geometry.
It is well-known that by applying a phase factor
in the
-space domain, a system is translated in
-space. Here, a novel interpretation is proposed. The translation effected by the above phase factor is a result of a forward and inverse Fourier transform pair in Equation (
10) and is thus a discrete translation. Each such convolution effects a discrete coordinate update by a finite amount, and motion thus described is therefore not continuous but a result of discrete interaction events at arbitrary intervals.
It is now clear how a 3+1D dynamical block universe can be encoded into a static 3+1D -space. A plane wave in -space of spatial frequency corresponds to a discrete transition event anywhere along a straight line path in -space. Such a distribution in -space corresponds to an entire classical trajectory as a whole.
The equation of motion in Equation (
11) is a constraint on coordinate intervals, emphasizing the importance of distinguishing between parameters and coordinate intervals. This distinction also exists in Feynman’s path integral formulation of QWP. We will next examine the path integral formulation to show its equivalence to the technique presented here.
2.5. Dispersion Relations
With the technique presented in Postulates 1 and 2 and the simple equation of motion of a massless free particle, Equation (
11), it is natural to seek dispersion relations for other familiar examples using this approach.
A wavefunction can be thought of in terms of wavepackets, or collections of frequency components of a finite bandwidth:
If time plays the role of an independent parameter upon which the spatial properties of the wavepacket depend, wavepackets will, in general, disperse because their frequency components have different speeds.
In the 3+1D wave distribution proposed here, we note that dispersion cannot correspond to the parameters, for they are independent and unmeasurable variables of integration; just as lines on a holographic plate are fixed in space, the parameters describing the waveforms in and -space do not evolve in time or disperse.
Rather, dispersion is a measurable process, so it must have to do with the coordinate intervals associated with interaction events. We will now show how one can recover dispersion relationships for each mode of a system. We use the notion that the 3+1D state cannot change during an interaction, so any global phase that arises must vanish.
2.5.1. Example: Non-Relativistic, Massive Free Particle
For a non-relativistic, massive free particle, we will write the unitary evolution operator as , where , and is an interval of time. The time interval is not required to be small because the operators in the exponent commute and can be factored without the Baker–Campbell–Hausdorff relation. Inclusion of the factor dependent on , conjugate to t, occurs because we are no longer treating time as the sole independent parameter.
The eigenfunctions of this transformation are plane waves, so the general form of the 3+1D wave distribution is
where
and
are coordinate intervals, i.e., single-valued, measurable properties of the system.
Inserting Equation (
21) into Equation (
20),
The first factor in the last line is just the original wavefunction decomposition, Equation (
21), so the global phase factors on the right must be set to unity for each mode
n in order for the wavefunction to be invariant. This is true if
This is the usual non-relativistic dispersion relationship for a mode
n.
Next, this process will be repeated for the quantum harmonic oscillator, an exactly solvable system of central importance in quantum mechanics and quantum field theory.
2.5.2. Example: Quantum Harmonic Oscillator
The well-known dispersion relationship for each mode of a quantum harmonic oscillator can be reproduced using the new formalism by applying Equation (
3) over a single quantum transition event. Equation (
3) is
where the Hamiltonian is
The time interval
is not required to be small because, as will be seen, we will not need to factor non-commuting operators in the exponent. We will assume separability in the space and time dependence of the wave distribution,
. We insert complete bases of
and
eigenstates as before, but instead of inserting complete bases of
and
eigenstates separately, we insert a complete basis of energy eigenstates,
. The time dependence is
found from the eigenfunctions of the equation
which has the same form as Equation (
15). The states
are eigenstates of the operator
.
Defining
,
, and
, Equation (
3) is then
where the well-known relation
for the harmonic oscillator was used.
Once again, we require the wave distribution to be invariant throughout this calculation since there is no external time for it to change with respect to. Equation (
28) shows that this occurs if the global phase factor for each mode vanishes. This constraint reproduces the well-known energy spectrum of the harmonic oscillator,
Factors of ℏ have been explicitly reintroduced for clarity.
2.6. Example: Two State System
We now explore the application of Equation (
3) to a two-state system. We will consider the dynamics of a spin-1/2 particle driven by an oscillating potential. This problem is typically solved by applying perturbation theory to the time-dependent Schrödinger equation (TDSE). The analysis will illustrate the equivalence of the present method to the usual perturbation theory approach, as well as provide a novel consideration when thinking about time dependence in equations of motion.
The energy eigenstates are those of the unperturbed Hamiltonian,
, which has two states
for spin along the
-axis. The perturbation is characterized by a time-dependent driving potential,
The aim is to find the solution to Schrödinger’s equation,
.
The standard approach is to insert the time-dependent Hamiltonian
into Schrödinger’s equation, obtaining an equation for the
m,
n energy eigenstates,
where
. One can proceed by integrating this equation with respect to time from the initial state to the final state,
obtaining an expression for the states’ time dependencies.
We shall now show that this is equivalent to Equation (
3) but that the new approach provides additional insight into the nature of time in the calculation. Two adjustments are necessary to show this equivalence. Firstly, we will redefine the potential with a windowing function,
This is reasonable if we are thinking of signals in
- or
-space, and this step allows us to extend the time integral in Equation (
33) across the entire domain without changing the value of the integral.
Secondly, Postulate 1 states that the wave distributions live in
-space and
-space, so it is clear that the coefficients
cannot be parameterized by both time
and energy (see the discussion on parameters in
Section 2.2). Rather, they are part of either one space
or the other space. Since they are coefficients of the energy eigenstates, which live in
-space, they must be parameterized by energy,
. The distinction between parameters and coordinates becomes important here because parameters and coordinates evolve in different ways. The “time dependence” of these coefficients actually refers to a time
coordinate. This means that the coefficients are not updated continuously but
iteratively through convolution.
Accordingly, we will relabel
, the tilde emphasizing that the symbol lives in
-space (i.e.,
-space). With these two adjustments, the integral turns into a Fourier series converting from the
domain to the time domain and a Fourier transform converting back to the
domain.
Here, the basis states used in the inverse transform are the two eigenstates of , labeled by , rather than a continuous distribution over . This is the first example we have seen of a quantum superposition of states in this theory. It occurs because we are transforming into a basis other than or , and the Fourier transform is a linear operator so it allows linear superpositions. The key distinction is the transform over instead of over .
Now that we have it in this form, the remainder of the example follows the standard derivation. We will find the resonant modes of the system by evaluating the integral in the time domain first, where the symbols
and ∑ emphasize the transform operations between the dual spaces.
Equation (
36) is equivalent to the results from first-order perturbation theory. Here, we have applied exactly one forward and inverse transform between
-space and
-space. This is a matrix equation whose eigenstates can be solved for the coefficients
via the usual methods. It suffices here to use the zeroth order values of the
as the initial conditions to eliminate
, obtaining for the coefficient of
,
It should be noted that our result is not parameterized by time. The coordinate
that appears is a result of the interaction with the potential/aperture in Equation (
34). Another interaction will update this value, but it does not vary continually. One should not think of time as evolving in the expression (
37), since it is written in
-space.
Equation (
37) is the same distribution in
-space found by typical methods, and the resonant driving frequency
is easy to read off the equation. Through a single Fourier transform of the windowed potential
, we are able to characterize the system’s resonant modes.
Example: Coulomb Potential
Here, a brief suggestion will be made on how to apply this approach to the Coulomb potential,
, but the case will not be fully worked out. We use the second line of Equation (
3), in this case using spherical coordinates. A complete set of spherical harmonic momentum eigenfunctions is inserted,
instead of Cartesian momentum eigenfunctions. Postulate 2 takes the form
so the conversion between the dual spaces is the spherical harmonic transform instead of the Fourier transform. The operator
acting on these basis functions results in a
-space phase factor whose phase is a function of the eigenvalues of this operator, which are the quantum numbers
n,
l,
m. As before, the invariance of the phase distribution constrains the coordinates and determines the equation of motion.
Interestingly, the inverse transform over the spherical harmonics will be discrete, with the basis states labeled by n, l, and m. Under this condition, the “coordinates” in -space are not “points” in a continuous -space but the quantum numbers n, l, and m associated with the discrete distributions . In other words, “locations” in the space correspond to the various harmonics that can exist for the system.
The simple results of the hydrogen atom seem trivial to reproduce with this approach, since they are just the spherical harmonic basis states, but the tools of signal processing suggested here may prove useful in reproducing the more complicated harmonic electronic states of heavier elements.




{kind=link}
{kind=link}
{kind=link}

