Abstract
Connected Autonomous Vehicles (CAVs) are expected to reshape transportation systems, yet their role in enhancing network robustness remains underexplored. This research intends to fill this gap by conducting a systematic review based on the Preferred Reporting Items for Systematic Reviews and Meta-Analyses protocol (PRISMA) to analyze 21 peer-reviewed publications identified from Scopus, Web of Science, and ScienceDirect. Articles were classified into five thematic areas: (1) system robustness, (2) infrastructure adaptation, (3) traffic flow and behavior, (4) security and communication, and (5) environmental impact. The results show that CAVs have the potential to improve robustness in transportation networks, thus helping the efficiency of transportation networks, reducing cyber vulnerability, and mitigating environmental impact. However, despite several advantages, CAVs also present challenges, including new infrastructure or updates to cybersecurity standards. This review contributes to the literature by consolidating current approaches, highlighting knowledge gaps, and offering methodological insights to guide research and policy development toward resilient, sustainable, and connected mobility systems.
1. Introduction
Integrating Intelligent Transportation Systems (ITS) into transportation networks is becoming increasingly common [1]. An example is the development of connectivity technologies and real-time data transmission [2]. The Internet of Things (IoT) is an ITS technology that integrates physical devices, vehicles, and other physical objects into a network [3]. Another example is technology such as vehicle-to-everything (V2X), which allows wireless communication from a vehicle to other elements (vehicles, roads, service stations, signals, or traffic lights) that can affect the vehicle [4]. V2X is also a communication technology compatible with 4G and 5G networks and can be implemented with all types of devices, such as vehicle-to-vehicle (V2V) and infrastructure (V2I) [5]. V2V allows real-time transmission of information from vehicles on the road, while V2I collects real-time information from the highway and road infrastructure [6,7].
Autonomous Vehicles (AVs) are one of the most promising ITS technologies [8]. Duarte et al. [9] remarked that AVs are vehicles capable of mimicking and performing the tasks of a human driver. AVs, particularly those classified at SAE (Society of Automotive Engineers) levels 3 to 5, are expected to significantly impact mobility and transport network design [10]. SAE level 3 is when the vehicle can decide on the actions to be taken when changing lanes, braking, or accelerating, as long as a driver is present to intervene if necessary [11]. SAE level 4 vehicles make all decisions without driver intervention, but the vehicle must be able to transfer control to the driver if the vehicle has issues [12]. At SAE level 5, the vehicle can make its own decisions without human or driver intervention [13].
AVs that can communicate with other traffic participants are known as Connected Autonomous Vehicles (CAVs) [14,15]. The CAVs include three fundamental functions: (1) perception, (2) planning, and (3) control [16]. Perception refers to the construction of an environmental map that enables the ego-vehicle (i.e., the CAVs) to navigate [17]. To achieve the mapping, perception is constituted by several sensors, such as the RADAR sensor, which measures the position and velocity of objects near the AV [18,19]. The LIDAR sensor emits laser light from various mobile systems (vehicles, airplanes, drones) and generates three-dimensional (3D) maps to detect obstacles near the CAVs [20,21]. The CAMERA sensor is used to produce 2D images of the environment [22,23]. Finally, the In-Vehicle-Sensors are the most commonly used in AVs and consist of the accelerometer, gyroscope, wheel speed sensor, and steering wheel angle sensor [24]. The planning functions within the CAV technology involve the driving action, i.e., through planning, CAVs can analyze and produce information to transform it into a driving action [25]. Thus, route planning, decision-making, and trajectory planning are mainly used for this function [26]. Once perception and planning have been established, the control monitors the vehicle’s actions [27,28]. For example, the control supervises trajectory maintenance, steering angle, speed monitoring, and the acquisition of acceleration data from the AVs [29,30].
The appeal of CAVs is linked to green technology, i.e., they offer the potential to reduce CO2 emissions, greenhouse gases, and fuel consumption, which points to a positive transformation of the quality of cities [31,32]. Moreover, CAVs can receive information about the traffic situation and intentions of dynamic entities in the transport systems because CAVs are AVs connected through connectivity technologies (V2X, V2V, and V2I) [33].
Despite presenting several advantages, CAVs pose challenges that stakeholders must consider when integrating them into existing transportation networks, especially regarding robustness [34,35]. Robustness is the ability of transportation equipment, components, or systems to recover their regular operation after facing an adverse, unexpected, and unusual magnitude situation such as accidents, traffic jams, or environmental changes [36]. It is believed that CAVs could play a significant role in robustness, although there is a lack of studies exploring their impact on the robustness of transportation networks.
Therefore, the aim of this systematic review is to provide an overview of the existing literature on the robustness of transportation networks through the integration of CAVs. It focuses on exploring the effects of this technology (CAVs) on robustness in transportation networks.
This paper covers the following research contributions:
- Literature review. This article provides a thorough examination of the various techniques employed for introducing CAVs in transport networks. This review aims to address the identified gap in previous studies on the topic.
- Impact analysis. Groups are set up to study and assess multiple viewpoints on the use of CAVs, providing a resilient perspective based on different areas of application in transportation networks.
- Novel Approaches and Methodologies. Evaluate the methodologies used to introduce CAVs in current transport networks, identify areas for improvement according to robustness, and show possible innovations that could contribute to the stability of the networks.
The subsequent sections of the systematic review are organized as follows: Section 1 provides a comprehensive overview of the pros and cons of new technologies, specifically Autonomous Vehicles (CAVs). Section 2 delineates the approach employed to conduct the systematic review. Section 3 presents the results, whilst Section 4 contains the analysis of the data and recommendations for further study. The concluding section discusses the findings of this study.
2. Materials and Methods
The Preferred Reporting Items for Systematic Reviews and Meta-Analyses (PRISMA) protocol has been used in several studies due to its advantages [37]. First, the protocol offers greater transparency and accessibility of the systematic review [8,38]. Second, PRISMA can identify gaps in the existing literature and potential areas for future research [39,40]. Finally, the PRISMA protocol is a checklist of 27 items that are categorized into (1) study identification criteria, (2) eligibility criteria, (3) data collection criteria, and (4) data analysis [41,42].
The literature suggests that the PRISMA approach can be used effectively in various settings [43,44,45,46]. For this purpose, several databases (Scopus, Web of Science, and Science Direct) were used to find articles related to the research topic. The following explains the systematic search process aligned with the PRISMA protocol.
2.1. Search Strategy
The systematic review followed the PRISMA protocol recommendations and was executed across multiple databases (Scopus, Web of Science, and Science Direct). The subsequent search queries were employed:
- Search string 1: (“Robustness” AND “Transportation Networks”) AND (“Autonomous Vehicle” OR “Self-driving Cars” OR “Driverless Cars”) AND (“Integration” OR “Embedding” OR “Implementation”)
- Search string 2: (((TS = (Robustness AND (Transportation OR Transport)))) AND ALL = (Autonomous Vehicle OR Self-driving Cars OR Driverless Cars)) AND AB = (Integration OR Embedding OR Implementation)
The first search string was applied in Scopus and Science Direct. The second search string was applied to the Web of Science search engine. In both strings, Boolean operators (AND, OR, NOT) were used to obtain accurate search results.
2.2. Selection Criteria
All articles related to the robustness of transportation concerning the introduction or integration of CAVs were selected. Furthermore, all articles must be whole texts from peer-reviewed journals or conference articles and must be composed in English.
2.3. Exclusion Criteria
Exclusion criteria were review articles, book chapters, books, conference abstracts, editorials, and non-English-language encyclopedia articles. There was no limitation on the year of publication.
2.4. Data Collection
In total, 15 articles were identified from Web of Science, 214 articles from Scopus, and 239 articles from Science Direct, resulting in a total of 448 identified articles. After removing 19 duplicate articles, excluding 3 articles not written in English and 161 articles belonging to review articles, book chapters, books, conference abstracts, and editorials, a total of 285 articles were identified. As a result, a total of 285 articles were eligible. Finally, through an exhaustive review of the titles and abstracts of the eligible articles, 264 articles were excluded, leaving 21 articles for the systematic review (See Figure 1). Furthermore, the appendix contains the data collected from the selected articles.
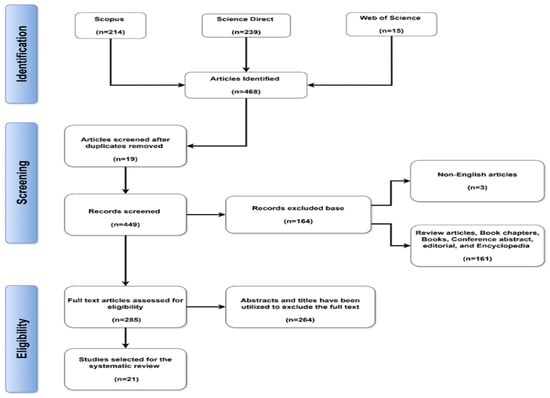
Figure 1.
Systematic review flowchart.
3. Results
This section’s results are divided into several subsections. First, the results of the articles developed over time are presented, giving an overview of how the study topic has evolved. As a subsequent point, a distribution of articles is presented according to the distribution of articles by journal and conference proceedings in progress. Last but not least, the methods used by the authors in each investigation are presented, with a focus on the most commonly used method. This emphasis on the common practices in the field helps the readers understand the research trends. Each subsection is described in detail below.
3.1. Articles over Time
The findings reveal that the year with the highest number of studies on the robustness of transportation networks and CAVs is 2024, with 9 articles, followed by 2023, with 5 articles. In third place was 2021, with 4 articles. The years 2022, 2018, and 2017 only had 1 article. In 2019 and 2020, there were no articles.
As shown in Table 1, the number of articles has grown from 1 in 2017 to 9 in 2024, which suggests an interdisciplinary character of research concerning the enhanced interest in this field of research. This is due to an increase in technological evolution, increased funding, or new regulations supporting research development in the study area. If the trend continues over the years, the increase in publications could be significant, which would increasingly cover the importance of carrying out research and determining the impact of this technology (CAVs) on the current transportation networks.

Table 1.
Articles analyzed by year of publication.
3.2. Distribution of Articles by the Journal/Conference Proceeding
Applied Ergonomics is the journal with the most publications concerning the robustness of transportation networks and CAVs, accounting for 9.52% of the 21 articles in the systematic review. The other journals have merely 4.7%, representing a singular article. Moreover, all journals are indexed in the Scopus and Web of Science indexes, except Transportation Research Procedia, which is indexed in a single database (Scopus) due to a conference proceeding (See Table 2).
Table 2.
Distribution of articles by journal and conference proceedings.
The wide range of specific journals highlights the interdisciplinary character of research concerning the robustness of transport networks in integrating CAVs, including factors such as safety, infrastructure, environment, and public acceptance. The articles examine aspects that illustrate the complex and diversified character of challenges associated with CAVs. Moreover, conferences are essential for research, as they broadcast recent scientific advancements and foster discourse. Generally, these spaces offer a platform for academics to articulate and advance their concepts in emerging disciplines.
3.3. Classification of Articles Based on the Applied Methods Table
The studies included in the systematic review show that all publications under its approach examine diverse methods (See Table 3). According to the results, the most used methods have a percentage of 9.52%, they are (1) the Binary Choice Model, the Multiplicative Random Utility Model, and the Weibull Distribution, (2) the Sequential Optimization Framework and MPC, (3) the Spatiotemporal Coordinated Optimization Model with SAGA, and (4) the Mathematical Framework and Infrastructure Planning. In contrast, the other methods (1) OESDs and SHERPA, (2) EAST and Distributed Cognition, (3) Collaborative Detection Models and V2X, Deep Learning, (4) MLP approach (5) Deep set assisted active learning approach, (6) Graph-Theory-based operation approach, (7) Quantum Enhanced Authentication and RLWE, (8) Secure Adaptive Control Algorithm, (9) Review of concepts and practices for transforming infrastructures from rigid to adaptive systems, (10) Integrated path planning-control design and neural activation approach, (11) IoT, (12) Serious gaming techniques and reinforced learning, and (13) MOVES, are only used once, resulting in a usage rate of only 4.76%.
Table 3.
Distribution of the articles based on their methodology.
In general, the use of the methods that make up the 9.52% is due to their robustness and adaptability to complex issues; for example, the Sequential Optimization Framework and Model Predictive Control (MPC) offer a dynamic adoption that is ideal for autonomous systems in real-time decision-making. The Binary Choice Model and Multiplicative Random Utility Model allow for modeling and predicting user behavior, which is crucial when designing resilient transportation systems. Finally, the spatially coordinated optimization model with SAGA and the Mathematical Framework and Infrastructure Planning proved to be a structured approach to infrastructure development while increasing traffic and mobility accuracy. This provides both a systematic approach to constructing transport networks and simultaneously solves the problems involved in this process in today’s urban areas.
3.4. Keyword Network Analysis
Using VOSviewer version 1.6.20, a keyword co-occurrence analysis was carried out to supplement the descriptive statistics of publication trends (Table 1 and Table 2). This approach highlights thematic clusters and research hotspots by determining relationships between keywords based on their simultaneous appearance in publications. All keyword links were captured using full counting and a minimum occurrence threshold of two. The density and keyword co-occurrence network visualizations are shown in Figure 2 and Figure 3 respectively.
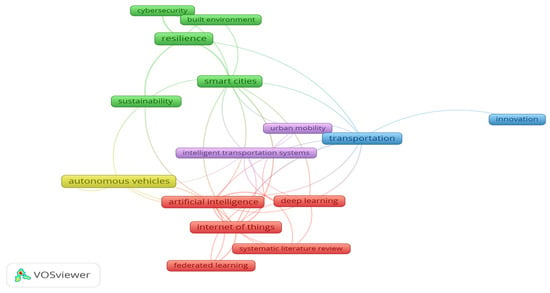
Figure 2.
Keyword co-occurrence.
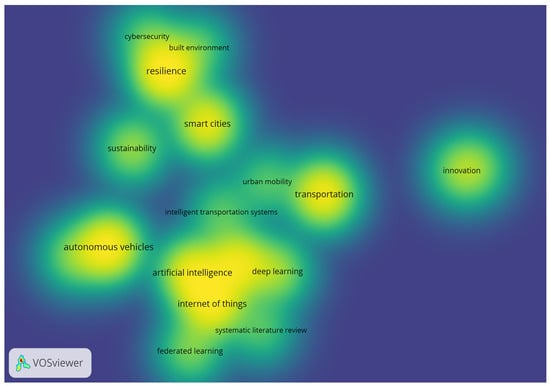
Figure 3.
Density map.
Five thematic clusters that organize current research on robustness and Connected Autonomous Vehicles (CAVs) were identified by the analysis:
- Cluster 1 (Red): IoT-based methods for vehicle automation and decision-making, deep learning, federated learning, and artificial intelligence were the main topics.
- Cluster 2 (Green): Stressing system robustness; this cluster is focused on resilience, cybersecurity, sustainability, and built environment adaptation.
- Transportation, innovation, and policy are all included in Cluster 3 (Blue), which reflects more general themes of infrastructure and governance.
- Cluster 4 (Yellow): Emphasizes governance and Autonomous Vehicles, bolstering operational and regulatory viewpoints.
- Cluster 5 (Purple): Connects CAV technologies with smart city integration, pertaining to intelligent transportation systems and urban mobility.
The density map (Figure 3) also shows hotspots around “autonomous vehicles,” “machine learning,” and “resilience,” which show how AI-driven approaches are combining with system robustness and infrastructure adaptation. The descriptive tables are enhanced by this bibliometric analysis, which also clarifies the field’s thematic structure and provides interpretative depth.
4. Discussion
This section shows the findings obtained from the systematic review carried out by the PRISMA protocol. The study identified 21 articles related to the robustness of transportation networks in introducing CAVs. Each article was distributed to a specific group according to its research gap and the results obtained.
4.1. Group 1: CAVs and Robustness
Within the first group, “CAVs and robustness,” the articles identified a gap in understanding how CAVs improve transport systems’ robustness in complex scenarios and environments, such as mixed-traffic conditions or road accidents. Therefore, several studies, like by Parnell et al. [47] proposed using SHERPA and OESD to improve robustness among road users. CAVs improve optimization, connectivity, efficiency, travel time, and fuel consumption, and reduce CO2 emissions in transportation systems [48,49]. Likewise, CAVs have an impact when reducing vulnerabilities in transportation networks, such as road delays [50,51]. The study conducted by Zou et al. [52] developed a robustness-based recovery system framework that helps transport networks recover from road disturbances.
The SHERPA + OESDs approaches provide a systematic procedure for identifying and preventing errors in road interaction, strengthening operational robustness at the organizational level. In contrast, distributed cognition frameworks (EAST) model information flows and team decision-making, explaining how systemic coordination affects system robustness. Resilience-based recovery schemes with Deep-Ensemble-Assisted Active Learning effectively restore performance after disturbances under mixed traffic (CAVs–HDVs). These methodologies cover human vulnerabilities (SHERPA/OESDs), cognitive architectures (EAST), and formal recovery mechanisms (active learning), offering differentiated but complementary contributions to strengthening the transportation network.
4.2. Group 2: CAVs and Infrastructure
The successful deployment of CAVs depends on resilient, connectivity-ready infrastructure, according to recent research. In complex urban environments, Shao et al. [53] show that V2X-enabled cooperative perception systems can improve safety and network stability by reducing occlusion-induced detection failures by almost 40%. Gu et al. [54] demonstrate behaviorally that perceived infrastructure readiness, specifically the availability of dependable vehicle-to-infrastructure (V2I) systems, has a significant impact on travelers’ willingness to use CAVs services. Beyond mobility, Liu et al. [55] show that Shared Autonomous Electric Vehicles (SAEVs) can improve energy resilience by connecting vital energy services with transportation infrastructure by delivering vehicle-to-building (V2B) emergency power during outages. The necessity for fast, flexible infrastructure is highlighted by Li et al. [56] with neural-activation-based path-tracking control for CAVs, which depends on real-time trajectory updates. These capabilities are envisioned by Gilrein et al. [57] as a component of a larger shift away from inflexible, reactive infrastructure systems and toward proactive, adaptive ones.
The need to upgrade legacy infrastructure with embedded sensors, edge computing nodes, and dynamic energy interfaces is illustrated by these convergent trends. Transportation Asset Management’s (TAM) overarching goal includes this kind of modernization. Originally thought of as a framework for operational maintenance, TAM is currently developing into a system for strategic planning. Modern TAM includes life cycle costing, risk-based investment, and performance forecasting—tools necessary for integrating new technologies like CAVs, as stressed by Sinha et al. [58]. Furthermore, Zhou and Xu [59] contend that since digital TAM systems facilitate the implementation of intelligent, robust, and cyber-secure transportation environments, they serve as the cornerstone for CAVs integration. Upgrading TAM is therefore a key enabler of infrastructure that can support safe, effective, and intelligent autonomous mobility rather than a secondary consideration.
In the domain of infrastructure, cooperative V2X/V2I approaches have been shown to enhance real-time network perception and stability (lower risk due to occlusions). Additionally, neural activation-based control and trajectory tracking schemes have been demonstrated to promote vehicle dynamic adaptability (lateral/longitudinal) in complex environments. Conversely, the integration of sequential frameworks with MPC and their application in conjunction with SAEVs has been demonstrated to facilitate energy-mobility co-management (e.g., V2B in contingencies), thereby extending the concept of robustness beyond the domain of traffic flow to encompass the energy resilience of critical assets. Finally, strategic asset management (TAM) guidelines place these technical improvements within a life cycle and risk planning framework, highlighting a methodological gradient: from immediate mitigation (V2X, neural control) to strategic adaptation (MPC/SAEVs, TAM) to sustain infrastructure robustness.
4.3. Group 3: CAVs and Traffic Flow/Behavior
Many studies underline the intricate link among supporting digital technologies, congestion levels, and Connected Autonomous Vehicles (CAVs). Particularly when vehicle data is aggregated and handled through edge computing platforms, Dui et al. [60] show that including Internet of Things (IoT) technologies into Intelligent Transportation Systems (ITS) enables real-time adaptive traffic control, which can greatly improve traffic flow and lower bottlenecks. These advantages, then, are context-dependent. Zarbakhshnia et al. [61] warn that, depending on usage models, CAVs have quite different effects on congestion. Their results show that uncontrolled, privately owned CAVs typically boost total vehicle kilometers driven (VKT), aggravating traffic in highly sought-after routes. On the other hand, generally, traffic volume and trip redundancy drop when CAVs are used in a shared or fleet-based model. Collins et al. [62] support this view by showing through a gamified experimental study that under recurrent congestion scenarios, ridesharing via Shared Automated Vehicles (SAVs) reaches a dominant 60% mode share, thus improving system performance. The same study reveals a “policy paradox,” though: SAVs can replace conventional transit and generate new traffic peaks during non-recurring events in the absence of strategic public transit funding. These studies highlight together that although CAVs and IoT technologies provide strong means to reduce congestion, their success depends on multimodal planning, governance, and adoption patterns matched with shared mobility models.
The utilization of IoT-enabled platforms for the purposes of monitoring and adaptive control has been demonstrated to engender direct efficiency gains (i.e., bottleneck relief) by closing the perception–decision loop in real time. Conversely, behavioral modeling and adoption approaches (e.g., MADM/DEMATEL-ANP and SEM) specify acceptance criteria, concerns, and usage patterns that condition the systemic performance of CAVs. Integrated planning-control with neural activation has been demonstrated to contribute to the operational management of trajectories and can reduce delays at the micro level. Emissions simulators (e.g., MOVES, according to the methodological classification) have been shown to allow the quantification of environmental effects associated with different levels of coordination and occupancy. It is evident from the comparison that technical optimization (IoT, neural control) must be articulated with the reality of adoption and behavior (MADM/DEMATEL-ANP, SEM) if local improvements are to be translated into observable network benefits.
4.4. Group 4: Security and Communication in CAVs Networks
As an autonomous technology, CAVs have to be connected to a central network. This makes it vulnerable to cyberattacks. Therefore, a lack of knowledge about data exchange or communication security could lead to constant cyberattacks or threats to quantum information. Petrillo et al. [63] proposed that having adaptive control can mitigate cyberattacks, thus improving the system’s robustness. Mishra et al. [64] suggested that quantum-enhanced security schemes are beneficial against attacks on the CAVs system and infrastructure. Wu et al. [65] studied the factors related to artificial intelligence, i.e., level of autonomy and anthropomorphic characteristics, that positively affect public confidence in CAVs.
The methodologies employed in the diagnosis and design of defensive measures differ between the two processes. Secure adaptive control algorithms mitigate heterogeneous latencies and cyberattacks while preserving mobility, while post-quantum cryptographic schemes (e.g., RLWE for authentication/AKA) reinforce the communication trust layer. Concurrently, the minimax game theory model embedded in multi-agent adaptive control introduces proactive defense against coordinated attacks (e.g., Sybil) in Multi-Agent Traffic Signal Control (AMATSC) systems based on multi-agent reinforcement learning, evidencing a transition from “discovering the problem” to “designing resilience.” This combination of robust control, cryptographic security, and adversarial game theory offers multi-layered coverage of cyber-physical robustness in CAV networks.
4.5. Group 5: CAVs and Environmental Impact
Although private CAVs ownership raises questions regarding possible increases in kilometers driven by vehicles, several scenario-based studies show that, under shared-use and high-coordination systems, CAVs deployment can greatly lower total vehicle traffic. Simulations in urban settings, for instance, show that, given high occupancy and efficient routing is maintained, Shared Autonomous Vehicle fleets can serve up to 90% of current demand with fewer vehicles and less congestion [66,67]. Still, these results depend mostly on active policy interventions and shared mobility platforms. Induced travel demand and empty vehicle repositioning could balance the disadvantages of the lack of such policies.
The results of scenario simulations provide evidence to suggest that, in circumstances where there are high coordination and shared use, SAVs/SAEVs have the potential to reduce effective vehicle demand and emissions. Furthermore, the employment of emissions inventory tools (for example, MOVES in the methodological classification) enables the quantitative attribution of these benefits to changes in occupancy, routing, and repositioning. However, the sensitivity of the issue to public policy and governance suggests that sustainability is a conditional outcome. Indeed, the absence of fleet management schemes, multimodal priority, and price signals may result in the increased availability of CAVs, which, in turn, may induce additional VKT, thereby eroding the environmental benefits estimated by the models. The comparison thus establishes a link between operational robustness and environmental robustness, yet this link is only established when coordination materializes in practice.
The reviewed methodologies thus provide complementary pieces of the same puzzle: SHERPA/OESDs and EAST reveal human and organizational vulnerabilities; MPC/SAEVs, V2X/V2I, IoT, and neural control translate these findings into operational and adaptation mechanisms; minimax game theory, safe adaptive control, and RLWE extend robustness to cybersecurity; and emissions simulators connect efficiency with sustainability. It is evident that no singular methodology encompasses all the dimensions of system performance; however, the integration of these methodologies facilitates the formulation of an operational map that elucidates the manner in which CAV integration can enhance network robustness in the face of diverse disturbances and institutional constraints. The present review makes a distinctive contribution by elucidating the methodological relationships, comparing their contributions, and aligning them with robustness-oriented infrastructure planning and management decisions.
4.6. Conceptual Insights and Future Research Directions
Integrating Connected Autonomous Vehicles (CAVs) into transportation networks presents a pressing need for investigation, as it raises unresolved issues that are not well explored in the current literature. While organizing empirical results around five applied themes: system robustness, infrastructure adaptation, traffic flow, user behavior, security and communication, and environmental impact, this review reveals a gap in the literature where few studies embed their analyses in strong conceptual frameworks. Applying complementary lenses from resilience theory, socio-technical transition theory, network science, behavioral economics, and technology-acceptance models (TAM) is crucial to deepening the understanding of how CAVs transform urban systems and transportation networks.
First, once CAVs are universal, resilience theory can help explain how infrastructure absorbs, adapts, and recovers from disturbances, paving the way for a more efficient and reliable transportation system. Second, the socio-technical transition theory emphasizes that infrastructure adaptation is a co-evolutionary process involving institutions, governance structures, and societal values, offering a more holistic view of progress. Third, when mixed CAVs–HDVs traffic shares the same area, network-science metrics could quantify variations in link-level vulnerability, leading to safer and more secure roads. Fourth, predicting user acceptance, ownership models, and induced-demand effects that affect resilience outcomes depends on behavioral-economic and TAM points of view, offering insights into user behavior and preferences. Ethical AI and cyber-resilience models are essential for assessing how secure communication protocols and algorithmic decision-making influence system resilience and public trust, ensuring a future of safety and confidence in autonomous mobility.
Future studies must adopt mixed-methods and multi-theoretical approaches, emphasizing the need for collaboration and shared knowledge. This could involve matching agent-based traffic simulations with qualitative policy studies or aggregating network science data with stated preference polls that probe behavioral assumptions. Comparative studies across regions with varying governance capacities, digital infrastructure maturity, and socioeconomic settings would help to clarify how CAVs benefits and risks show under different conditions. Guiding legislators, urban designers, and industry stakeholders toward resilient, fair, and sustainable autonomous-mobility futures will depend on such theoretically grounded, multidisciplinary effort.
5. Conclusions
This study applied PRISMA to group 21 studies into five themes: system robustness, infrastructure adaptation, traffic flow and behavioral dynamics, security and communication, and environmental influence. These themes provide a comprehensive view, revealing advances and knowledge gaps. AI-driven control, IoT connectivity, and real-time decision-making enhance operational robustness, but communication infrastructure and cybersecurity needs remain under-examined. Environmental benefits depend on collaborative fleet models. Overall, the data contribute to the advancement of the discipline by examining robustness and related concepts, including resilience, vulnerability, dependability, and fault tolerance, as identified in the keyword co-occurrence analysis. The proposed conceptual framework integrates technological innovation with strategic planning, underscoring the role of CAVs in establishing flexible, secure, and sustainable transportation networks.
Connected Autonomous Vehicles (CAVs) are transforming mobility by increasing system intelligence and adaptability. While the existing literature highlights the potential of CAVs to enhance efficiency, safety, and sustainability, this review demonstrates that achieving these benefits requires a resilience-oriented strategy. Such a strategy must proactively address system disruptions, mixed-traffic conditions, and the readiness of both digital and physical infrastructure.
This review identifies five key themes in the literature on CAVs: system robustness, infrastructure adaptation, traffic flow and behavioral dynamics, security and communication, and environmental influence. Each theme highlights critical areas where knowledge is progressing or remains insufficient. The review notes that while AI-driven control, IoT connectivity, and real-time decision-making have improved operational robustness, reliance on communication infrastructure and cybersecurity frameworks is still insufficiently addressed. Furthermore, although environmental benefits are frequently cited, achieving them depends on multimodal integration, collaborative fleet models, and equitable policy implementation.
In general, the advancement of the field is drawn from the presented data. This research corroborates key findings and clarifies the relationships between robustness and topics identified through keyword co-occurrence analysis, such as resilience, vulnerability, dependability, and fault tolerance. The study outlines the role of CAVs in developing flexible, safe, and sustainable transportation networks and introduces a conceptual framework that integrates technological innovation with strategic planning.
The synthesis recommends integrating resilience theory, socio-technical transition models, and network science to better assess the systemic impacts of CAV adoption. Future research should emphasize large-scale modeling environments, pilot implementations, and governance structures that embed robustness into infrastructure investment decisions. Proactive policies should prioritize secure-by-design communication protocols, infrastructure preparedness, and assessment frameworks that balance innovation, safety, environmental sustainability, and efficiency.
Author Contributions
Conceptualization, F.E.E.-M., G.J.A.M. and J.B.; methodology, F.E.E.-M., G.J.A.M., J.P.D.-S and J.B.; software, F.E.E.-M., G.J.A.M. and J.B.; validation, F.E.E.-M., G.J.A.M. and J.B.; formal analysis, F.E.E.-M., J.P.D.-S, G.J.A.M. and J.B.; investigation, F.E.E.-M., G.J.A.M. and J.B.; resources, F.E.E.-M., G.J.A.M. and J.B.; data curation, F.E.E.-M., G.J.A.M. and J.B.; writing—original draft preparation, F.E.E.-M., G.J.A.M. and J.B.; writing—review and editing, F.E.E.-M., G.J.A.M. and J.B.; visualization, F.E.E.-M., G.J.A.M. and J.B.; supervision, F.E.E.-M., J.P.D.-S, G.J.A.M. and J.B.; project administration, F.E.E.-M., J.P.D.-S, G.J.A.M. and J.B. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Acknowledgments
Thanks to the Instituto del Austro of the city of Azogues Ecuador for their help in the transport laboratory.
Conflicts of Interest
The authors declare no conflicts of interest.
Abbreviations
| DCOG | Applying Distributed Cognition |
| AVs | Autonomous Vehicles |
| CAVs | Connected Autonomous Vehicles |
| DEMATEL-ANP | Decision-Making Trial and Evaluation Laboratory—Analytic Network Process |
| EAST | Event Analysis Of Systemic Teamwork |
| HDVs | Human-Driven Vehicles |
| ITS | Intelligent Transportation Systems |
| loT | Internet Of Things |
| PRISMA | Preferred Reporting Items For Systematic Reviews And Meta-Analyses |
| MOVES | Motor Vehicle Emission Simulator |
| MPC | Model Predictive Control |
| MLP | Multi-Level Perspective |
| OESDS | Operator Event Sequence Diagrams |
| SAE | Society Of Automotive Engineers |
| SHERPA | System Human Error Reduction and Prevention Analysis |
| SAGA | Search-Adjustment Genetic Algorithm |
| SAEVs | Shared Autonomous Electric Vehicles |
| SEM | Structural Equation Modeling |
| RLWE | Quantum-Enhanced Authentication and Ring Learning with Errors |
| TAM | Transportation Asset Management |
| V2X | Vehicle-to-Everything |
| V2B | Vehicle-to-Building |
| V2V | Vehicle-to-Vehicle |
| V2I | Vehicle-to-Infrastructure |
Appendix A
The articles presented in Appendix A were reviewed according to the PRISMA protocol. Several strings were included for the direct relevance of robustness in transport networks and CAVs (Section 2). The robustness impact of each study was analyzed based on the results, which were related to network adaptability, recovery, or risk mitigation.
| Authors | GAP | Methodology | Result |
|---|---|---|---|
| Parnell et al. (2023) [47] | Develop a predictive method to assess the robustness between Autonomous Vehicles and vulnerable users. | SHERPA and OESDs | Combining the Systemic Human Error Reduction and Prediction Approach (SHERPA) with the operator event sequence diagrams (OESDs) improved robustness between cyclists and AVs. |
| Banks et al. (2018) [48] | Lack of understanding of how autonomous and wireless technology integration affects the transportation network. | Distributed Cognition Model (EAST) | Applying Distributed Cognition (DCOG) through Event Analysis of Systemic Teamwork (EAST), it was determined that introducing AVs could optimize transport networks’ efficiency, connectivity, and robustness. |
| Gu et al. (2024) [54] | There is a lack of travel modes that can predict the integration of new modes of transport, such as AVs. | Binary Choice Model for adoption of emerging travel modes with Multiplicative Random Utility Model and Weibull Distribution | The development of the alternative oddball (BW-O) model determined that introducing AVs depends on developing adequate infrastructure, which would impact transportation networks. |
| Shao et al. (2024) [53] | Single-agent detection models, in specific scenarios, have limitations in complex scenarios or environments. | V2X communication modeling | Collaborative models such as vehicle-to-everything (V2X) improved robustness of real-time communication in transport networks, reducing risks from limited views in complex scenarios. |
| Liu et al. (2024) [55] | There is a lack of studies on the possibilities of interaction between the shared mobility system and the electric network of Shared Autonomous Electric Vehicles (SAEVs) | Sequential Optimization Framework and MPC | Shared Autonomous Electric Vehicles (SAEVs) have the potential to provide vehicle-to-building (V2B) service for critical buildings, significantly improving the robustness of critical buildings during outages |
| Obaid & Török (2022) [50] | The macro-scenic road network model’s analysis of the effect of various AVs penetration levels and automation scenarios on road vulnerability is limited. | Sequential Optimization Framework and MPC | The results show that introducing AVs reduces network vulnerability and improves robustness to road failure. |
| Dui et al. (2024) [60] | Determine the constraints on active and dynamic traffic flow management to alleviate congestion. | IoT-enabled traffic monitoring | Implementing technology like the Internet of Things (IoT) in transportation, alongside the advent of Autonomous Vehicles (AVs), can mitigate traffic congestion and enhance robustness by optimizing traffic flow. |
| Petrillo et al. (2021) [63] | It identifies the vulnerabilities of AVs to cyberattacks and the inconsistencies in communication latency. | Adaptive control algorithm | The results indicate that designing a secure, adaptive control method for AVs mitigates cyberattacks, improves system robustness, and ensures vehicle mobility despite hostile threats. |
| Li et al. (2024) [56] | The research gap refers to the lack of a dynamic system that integrates lateral and longitudinal control of AVs in complex traffic scenarios. | Neural activation for path-control design | The development of control systems in transport networks has the robustness to adapt to AVs routes in real-time, reducing delays and optimizing routes. |
| Jiang et al. (2024) [51] | Identify Connected and Autonomous Vehicle (CAVs) operations in complex environments such as long construction tunnels. | Spatiotemporal coordinated optimization with SAGA | Developing a Spatiotemporal Coordinated Optimization Model enhanced the safety and efficiency of the CAVs, reducing vehicle operating time, delays, and fuel consumption, improving robustness under complex conditions. |
| Zou & Chen (2021) [52] | There is a gap in understanding the travel behavior of multi-class users (CAVs and human-driven vehicles (HDVs)) inside the transportation network during post-hazard recovery. | Deep-Ensemble-Assisted Active Learning Approach | The development of a two-level decision-making framework for robustness-based recovery scheduling of transport networks considering both CAVs and HDVs shows that the transport network can support and recover in mixed-traffic environments. |
| Zhou & Xu (2023) [59] | The gap in the study is to understand what requirements are needed for the socio-technical transition to robotaxis. | MLP approach | Including robotaxis improves mobility robustness in cities by increasing transit options |
| Zeng et al. (2024) [66] | Models dealing with managing fleets and building charging stations for AVs in cities are not well understood. | Strategic fleet management | The results show that by developing strategic automated fleet management (AVs), fleet size can be reduced by up to 40%, which relieves traffic congestion, saves travel time, and reduces emissions. |
| Gilrein et al. (2021) [57] | There is a lack of understanding of how structures can be agile and resilient in the face of abrupt infrastructure resources or climate change. | Binary Choice Model for adoption of emerging travel modes using Multiplicative Random Utility Model and Weibull Distribution | Integrating AVs into the transportation network improves robustness infrastructure, especially with technologies such as vehicle-to-infrastructure (V2I) and vehicle-to-vehicle (V2V). |
| Wu et al. (2023) [65] | Study the factors and effects of artificial intelligence, i.e., the level of autonomy and anthropomorphic characteristics of Shared Autonomous Vehicles (SAVs) towards humans. | Structural Equation Modeling (SEM) | Factors related to artificial intelligence, i.e., level of autonomy and anthropomorphic characteristics, positively affect public confidence in SAVs. Furthermore, introducing AVs into the transportation network improves the robustness of transportation systems. |
| Zarbakhshnia & Ma (2024) [61] | There is a lack of understanding about adopting AVs in sustainable urban transport networks. | Multiple-Attribute Decision-making (MADM) and Decision-Making Trial and Evaluation Laboratory—Analytic Network Process (DEMATEL-ANP) | The results show that factors related to adoption robustness and user acceptance are the most essential criteria for adopting AVs. |
| Collins et al. (2024) [62] | There is a lack of methods to study travel behavior in AVs systems. | Integrated path planning-control design using neural-activation approach for Autonomous Vehicles | The introduction of Avs into transportation networks, mainly Shared Automated Vehicles (SAVs), can improve the robustness of transportation systems by influencing travel behavior and reducing congestion. |
| Le Hong & Zimmerman (2021) [67] | Understand the impacts of CAVs and their influence on air quality and greenhouse gas emissions. | Environmental robustness | Introducing CAVs can improve air quality and greenhouse gas emissions and enhance robustness in transport networks. |
| Sinha et al. (2017) [58] | Traditional transportation asset management (TAM) systems do not provide sufficient attention to new technologies and the changing transportation landscape. | Serious game techniques and reinforced learning to analyze travel behavior in gamified multimodal networks | The adoption of AVs has the potential to improve the robustness and sustainability of transportation but requires a significant upgrade of Transportation Asset Management (TAM) principles. |
| Mishra et al. (2023) [64] | Identify vulnerabilities affecting post-quantum security in the pre-quantum era of AVs systems. | Quantum-enhanced authentication and key agreement protocol using RLWE | The development of a quantum security scheme and key agreement (AKA) provides robust authentication for cyber robustness in transport networks. |
| Mallah et al. (2023) [49] | There is a gap in the lack of clarification of the effects that the introduction of CAVs would have on the robustness of the transport networks. | Minimax Game-Theoretic Model | The introduction of CAVs improves the robustness of transport networks, travel time, fuel consumption, and CO2 emissions. |
References
- Elassy, M.; Al-Hattab, M.; Takruri, M.; Badawi, S. Intelligent Transportation Systems for Sustainable Smart Cities. Transp. Eng. 2024, 16, 100252. [Google Scholar] [CrossRef]
- Miller, J. Vehicle-to-Vehicle-to-Infrastructure (V2V2I) Intelligent Transportation System Architecture. In Proceedings of the IEEE Intelligent Vehicles Symposium Proceedings, Eindhoven, The Netherlands, 4–6 June 2008; pp. 715–720. [Google Scholar] [CrossRef]
- Wang, Y.; Zen, H.; Sabri, M.F.M.; Wang, X.; Kho, L.C. Towards Strengthening the Resilience of IoV Networks-A Trust Management Perspective. Future Internet 2022, 14, 202. [Google Scholar] [CrossRef]
- Deng, Z.; Shi, Y.; Shen, W. V2X-Lead: LiDAR-Based End-to-End Autonomous Driving with Vehicle-to-Everything Communication Integration. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems, Detroit, MI, USA, 1–5 October 2023; Institute of Electrical and Electronics Engineers Inc.: New York, NY, USA, 2023; pp. 7471–7478. [Google Scholar]
- Garcia-Roger, D.; González, E.E.; Martín-Sacristán, D.; Monserrat, J.F. V2X Support in 3GPP Specifications: From 4G to 5G and Beyond. IEEE Access 2020, 8, 190946–190963. [Google Scholar] [CrossRef]
- Bolufe, S.; Azurdia-Meza, C.A.; Cespedes, S.; Montejo-Sanchez, S. Impact of Awareness Control on V2V-Based Overtaking Application in Autonomous Driving. IEEE Commun. Lett. 2021, 25, 1373–1377. [Google Scholar] [CrossRef]
- Outay, F.; Kamoun, F.; Kaisser, F.; Alterri, D.; Yasar, A. V2V and V2I Communications for Traffic Safety and CO2 Emission Reduction: A Performance Evaluation. Procedia Comput. Sci. 2019, 151, 353–360. [Google Scholar] [CrossRef]
- Ortega, J.; Ortega, M.; Ismael, K.; Ortega, J.; Moslem, S. Systematic Review of Overtaking Maneuvers with Autonomous Vehicles. Transp. Eng. 2024, 17, 100264. [Google Scholar] [CrossRef]
- Duarte, F.; Ratti, C. The Impact of Autonomous Vehicles on Cities: A Review. J. Urban. Technol. 2018, 25, 3–18. [Google Scholar] [CrossRef]
- Lowe, E.; Guvenc, L. Autonomous Vehicle Emergency Obstacle Avoidance Maneuver Framework at Highway Speeds. Electronics 2023, 12, 4765. [Google Scholar] [CrossRef]
- Norouzi, A.; Barari, A.; Adibi-Asl, H. Stability Control of an Autonomous Vehicle in Overtaking Manoeuvre Using Wheel Slip Control. Int. J. Intell. Transp. Syst. Res. 2020, 18, 320–330. [Google Scholar] [CrossRef]
- Kim, J.H.; Lee, G.; Lee, J.; Yuen, K.F.; Kim, J. Determinants of Personal Concern about Autonomous Vehicles. Cities 2022, 120, 103462. [Google Scholar] [CrossRef]
- Abosuliman, S.S.; Almagrabi, A.O. Routing and Scheduling of Intelligent Autonomous Vehicles in Industrial Logistics Systems. Soft Comput. 2021, 25, 11975–11988. [Google Scholar] [CrossRef]
- Ortega, J.; Lengyel, H.; Szalay, Z. Overtaking Maneuver Scenario Building for Autonomous Vehicles with PreScan Software. Transp. Eng. 2020, 2, 100029. [Google Scholar] [CrossRef]
- Parkes, S.; Ferrari, E. Connected and Autonomous Vehicles: The Challenges Facing Cities and Regions; Routledge: London, UK, 2023. [Google Scholar]
- Eskandarian, A.; Wu, C.; Sun, C. Research Advances and Challenges of Autonomous and Connected Ground Vehicles. IEEE Trans. Intell. Transp. Syst. 2020, 22, 683–711. [Google Scholar] [CrossRef]
- Saranya, M.; Archana, N.; Arundhathi, B. Tracking and Estimation of Ego-Vehicle. Nat. Volatiles Essent. Oils 2021, 8, 3269–3281. [Google Scholar]
- Zolock, J.; Senatore, C.; Yee, R.; Larson, R.; Curry, B. The Use of Stationary Object Radar Sensor Data from Advanced Driver Assistance Systems (ADAS) in Accident Reconstruction. SAE Tech. Pap. 2016, 1, 1465. [Google Scholar] [CrossRef]
- Okuda, R.; Kajiwara, Y.; Terashima, K. A Survey of Technical Trend of ADAS and Autonomous Driving. In Proceedings of the Technical Program—2014 International Symposium on VLSI Technology, Systems and Application (VLSI-TSA), Hsinchu, Taiwan, 28–30 April 2014; IEEE: New York, NY, USA, 2014; pp. 1–4. [Google Scholar]
- Mounabhargav, P.; Anurag; Agrawal, P. Camera and LiDAR Integration for Lane-Following and Obstacle Avoidance in Self-Driving Cars. In Proceedings of the 2024 International Conference on Emerging Smart Computing and Informatics, ESCI 2024, Pune, India, 5–7 March 2024. [Google Scholar]
- Catapang, A.N.; Ramos, M. Obstacle Detection Using a 2D LIDAR System for an Autonomous Vehicle. In Proceedings of the 6th IEEE International Conference on Control System, Computing and Engineering, ICCSCE 2016, Penang, Malaysia, 25–27 November 2016; pp. 441–445. [Google Scholar] [CrossRef]
- Kocic, J.; Jovicic, N.; Drndarevic, V. Sensors and Sensor Fusion in Autonomous Vehicles. In Proceedings of the 2018 26th Telecommunications Forum (TELFOR), Belgrade, Serbia, 20–21 November 2018; IEEE: New York, NY, USA, 2018; pp. 420–425. [Google Scholar]
- Anindyaguna, K.; Basjaruddin, N.C.; Saefudin, D. Overtaking Assistant System (OAS) with Fuzzy Logic Method Using Camera Sensor. In Proceedings of the 2016 2nd International Conference of Industrial, Mechanical, Electrical, and Chemical Engineering, ICIMECE 2016, Yogyakarta, Indonesia, 6–7 October 2016; pp. 89–94. [Google Scholar] [CrossRef]
- Varghese, J.Z.; Boone, R.G. Overview of Autonomous Vehicle Sensors and Systems. In Proceedings of the International Conference on Operations Excellence and Service Engineering, Orlando, FL, USA, 10–11 September 2015; pp. 178–191. [Google Scholar]
- Al-Hasan, S.; Vachtsevanos, G. Intelligent Route Planning for Fast Autonomous Vehicles Operating in a Large Natural Terrain. Robot. Auton. Syst. 2002, 40, 1–24. [Google Scholar] [CrossRef]
- Liebig, T.; Piatkowski, N.; Bockermann, C.; Morik, K. Dynamic Route Planning with Real-Time Traffic Predictions. Inf. Syst. 2017, 64, 258–265. [Google Scholar] [CrossRef]
- Németh, B.; Gaspar, P.; Hegedus, T.; Németh, B.; Gáspár, P.; Hegeds, T.; Nemeth, B.; Gaspar, P.; Hegedus, T.; Németh, B.; et al. Optimal Control of Overtaking Maneuver for Intelligent Vehicles. J. Adv. Transp. 2018, 2018, 1–11. [Google Scholar] [CrossRef]
- Perez, J.; Milanes, V.; Onieva, E.; Godoy, J.; Alonso, J. Longitudinal Fuzzy Control for Autonomous Overtaking. In Proceedings of the 2011 IEEE International Conference on Mechatronics, Istanbul, Turkey, 13–15 April 2011; IEEE: New York, NY, USA, 2011; pp. 188–193. [Google Scholar]
- Zhang, Y.; Hoogendoorn, R.; Mazo, M.; Hellendoorn, H. Steering Controller Identification and Design for Human-like Overtaking. Procedia Manuf. 2015, 3, 2526–2533. [Google Scholar] [CrossRef][Green Version]
- Ortega, J.; Lengyel, H.; Ortega, J. Design and Analysis of the Trajectory of an Overtaking Maneuver Performed by Autonomous Vehicles Operating with Advanced Driver-Assistance Systems (ADAS) and Driving on a Highway. Electronics 2023, 12, 51. [Google Scholar] [CrossRef]
- Igliński, H.; Babiak, M. Analysis of the Potential of Autonomous Vehicles in Reducing the Emissions of Greenhouse Gases in Road Transport. Procedia Eng. 2017, 192, 353–358. [Google Scholar] [CrossRef]
- Chen, Y.; Gonder, J.; Young, S.; Wood, E. Quantifying Autonomous Vehicles National Fuel Consumption Impacts: A Data-Rich Approach. Transp. Res. Part A Policy Pr. 2019, 122, 134–145. [Google Scholar] [CrossRef]
- Machardy, Z.; Khan, A.; Obana, K.; Iwashina, S. V2X Access Technologies: Regulation, Research, and Remaining Challenges. IEEE Commun. Surv. Tutor. 2018, 20, 1858–1877. [Google Scholar] [CrossRef]
- Krügel, S.; Uhl, M. Autonomous Vehicles and Moral Judgments under Risk. Transp. Res. Part A Policy Pr. 2022, 155, 1–10. [Google Scholar] [CrossRef]
- Nikitas, A.; Vitel, A.-E.; Cotet, C. Autonomous Vehicles and Employment: An Urban Futures Revolution or Catastrophe? Cities 2021, 114, 103203. [Google Scholar] [CrossRef]
- Dekker, S.; Cilliers, P.; Hofmeyr, J.H. The Complexity of Failure: Implications of Complexity Theory for Safety Investigations. Saf. Sci. 2011, 49, 939–945. [Google Scholar] [CrossRef]
- Sarkis-Onofre, R.; Catalá-López, F.; Aromataris, E.; Lockwood, C. How to Properly Use the PRISMA Statement. Syst. Rev. 2021, 10, 13–15. [Google Scholar] [CrossRef]
- Rethlefsen, M.L.; Kirtley, S.; Waffenschmidt, S.; Ayala, A.P.; Moher, D.; Page, M.J.; Koffel, J.B.; Blunt, H.; Brigham, T.; Chang, S.; et al. PRISMA-S: An Extension to the PRISMA Statement for Reporting Literature Searches in Systematic Reviews. Syst. Rev. 2021, 10, 39. [Google Scholar] [CrossRef]
- Zhang, X.; Tao, J.; Tan, K.; Törngren, M.; Sánchez, J.M.G.; Ramli, M.R.; Tao, X.; Gyllenhammar, M.; Wotawa, F.; Mohan, N.; et al. Finding Critical Scenarios for Automated Driving Systems: A Systematic Literature Review. IEEE Trans. Softw. Eng. 2022, 49, 991–1026. [Google Scholar] [CrossRef]
- Ortega, J.; Uvidia, R.V. Mathematical Models Applied to the Localization of Park-and-Ride Systems: A Systematic Review. Vehicles 2025, 7, 46. [Google Scholar] [CrossRef]
- Page, M.J.; McKenzie, J.E.; Bossuyt, P.M.; Boutron, I.; Hoffmann, T.C.; Mulrow, C.D.; Shamseer, L.; Tetzlaff, J.M.; Akl, E.A.; Brennan, S.E.; et al. The PRISMA 2020 Statement: An Updated Guideline for Reporting Systematic Reviews. BMJ 2021, 372, 71. [Google Scholar] [CrossRef]
- Liberati, A.; Altman, D.G.; Tetzlaff, J.; Mulrow, C.; Gøtzsche, P.C.; Ioannidis, J.P.A.; Clarke, M.; Devereaux, P.J.; Kleijnen, J.; Moher, D. The PRISMA Statement for Reporting Systematic Reviews and Meta-Analyses of Studies That Evaluate Healthcare Interventions: Explanation and Elaboration. BMJ 2009, 339, b2700. [Google Scholar] [CrossRef] [PubMed]
- Albahri, A.S.; Khaleel, Y.L.; Habeeb, M.A.; Ismael, R.D.; Hameed, Q.A.; Deveci, M.; Homod, R.Z.; Albahri, O.S.; Alamoodi, A.H.; Alzubaidi, L. A Systematic Review of Trustworthy Artificial Intelligence Applications in Natural Disasters. Comput. Electr. Eng. 2024, 118, 109409. [Google Scholar] [CrossRef]
- Hrelja, R.; Khan, J.; Pettersson, F. How to Create Efficient Public Transport Systems? A Systematic Review of Critical Problems and Approaches for Addressing the Problems. Transp. Policy 2020, 98, 186–196. [Google Scholar] [CrossRef]
- Kaye, S.A.; Somoray, K.; Rodwell, D.; Lewis, I. Users’ Acceptance of Private Automated Vehicles: A Systematic Review and Meta-Analysis. J. Saf. Res. 2021, 79, 352–367. [Google Scholar] [CrossRef]
- Pavão, J.; Bastardo, R.; Rocha, N.P. Cyber Resilience and Intelligent Transport Systems, a Scoping Review. Procedia Comput. Sci. 2024, 239, 139–148. [Google Scholar] [CrossRef]
- Parnell, K.J.; Stanton, N.A.; Banks, V.A.; Plant, K.L. Resilience Engineering on the Road: Using Operator Event Sequence Diagrams and System Failure Analysis to Enhance Cyclist and Vehicle Interactions. Appl. Erg. 2023, 106, 103870. [Google Scholar] [CrossRef]
- Banks, V.A.; Stanton, N.A.; Burnett, G.; Hermawati, S. Distributed Cognition on the Road: Using EAST to Explore Future Road Transportation Systems. Appl. Erg. 2018, 68, 258–266. [Google Scholar] [CrossRef]
- Al Mallah, R.; Halabi, T.; Farooq, B. Resilience-by-Design in Adaptive Multi-Agent Traffic Control Systems. ACM Trans. Priv. Secur. 2023, 26, 1–27. [Google Scholar] [CrossRef]
- Obaid, M.; Török, Á. Autonomous Vehicle Impact on Improving Road Network Vulnerability. Eur. Transp. Res. Rev. 2022, 14, 24. [Google Scholar] [CrossRef]
- Jiang, Y.; Xia, K.; Jiang, H.; Chen, F.; Yao, Z. A Spatiotemporal Optimization Method for Connected and Autonomous Vehicle Operations in Long Tunnel Constructions. Phys. A Stat. Mech. Its Appl. 2024, 651, 130041. [Google Scholar] [CrossRef]
- Zou, Q.; Chen, S. Resilience-Based Recovery Scheduling of Transportation Network in Mixed Traffic Environment: A Deep-Ensemble-Assisted Active Learning Approach. Reliab. Eng. Syst. Saf. 2021, 215, 107800. [Google Scholar] [CrossRef]
- Shao, Z.; Yang, K.; Sun, P.; Hu, Y.; Boukerche, A. The Evolution of Detection Systems and Their Application for Intelligent Transportation Systems: From Solo to Symphony. Comput. Commun. 2024, 225, 96–119. [Google Scholar] [CrossRef]
- Gu, Y.; Chen, A.; Jang, S.; Kitthamkesorn, S. A Binary Choice Model for Adoption of an Emerging Travel Mode with Unique Service Features. Commun. Transp. Res. 2024, 4, 100121. [Google Scholar] [CrossRef]
- Liu, J.; Abdin, A.; Puchinger, J. Improving Critical Buildings Energy Resilience via Shared Autonomous Electric Vehicles—A Sequential Optimization Framework. Comput. Oper. Res. 2024, 163, 106513. [Google Scholar] [CrossRef]
- Li, X.; Gong, X.; Chen, Y.-H.; Huang, J.; Zhong, Z. Integrated Path Planning-Control Design for Autonomous Vehicles in Intelligent Transportation Systems: A Neural-Activation Approach. IEEE Trans. Intell. Transp. Syst. 2024, 25, 7602–7618. [Google Scholar] [CrossRef]
- Gilrein, E.J.; Carvalhaes, T.M.; Markolf, S.A.; Chester, M.V.; Allenby, B.R.; Garcia, M. Concepts and Practices for Transforming Infrastructure from Rigid to Adaptable. Sustain. Resilient Infrastruct. 2021, 6, 213–234. [Google Scholar] [CrossRef]
- Sinha, K.C.; Labi, S.; Agbelie, B.R.D.K. Transportation Infrastructure Asset Management in the New Millennium: Continuing Issues, and Emerging Challenges and Opportunities. Transp. A Transp. Sci. 2017, 13, 591–606. [Google Scholar] [CrossRef]
- Zhou, Y.; Xu, M. Robotaxi Service: The Transition and Governance Investigation in China. Res. Transp. Econ. 2023, 100, 101326. [Google Scholar] [CrossRef]
- Dui, H.; Zhang, S.; Liu, M.; Dong, X.; Bai, G. IoT-Enabled Real-Time Traffic Monitoring and Control Management for Intelligent Transportation Systems. IEEE Internet Things J. 2024, 11, 15842–15854. [Google Scholar] [CrossRef]
- Zarbakhshnia, N.; Ma, Z. Critical Success Factors for the Adoption of AVs in Sustainable Urban Transportation. Transp. Policy 2024, 156, 62–76. [Google Scholar] [CrossRef]
- Collins, M.; Etzioni, S.; Ben-Elia, E. Travel Behavior and System Dynamics in a Simple Gamified Automated Multimodal Network. Transp. Res. Part. A Policy Pract. 2024, 183, 104060. [Google Scholar] [CrossRef]
- Petrillo, A.; Pescape, A.; Santini, S. A Secure Adaptive Control for Cooperative Driving of Autonomous Connected Vehicles in the Presence of Heterogeneous Communication Delays and Cyberattacks. IEEE Trans. Cybern. 2021, 51, 1134–1149. [Google Scholar] [CrossRef] [PubMed]
- Mishra, D.; Pursharthi, K.; Rewal, P. Development of Quantum-Enhanced Authenticated Key Agreement Protocol for Autonomous Vehicles. Veh. Commun. 2023, 44, 100688. [Google Scholar] [CrossRef]
- Wu, M.; Wang, N.; Yuen, K.F. Can Autonomy Level and Anthropomorphic Characteristics Affect Public Acceptance and Trust towards Shared Autonomous Vehicles? Technol. Forecast. Soc. Change 2023, 189, 122384. [Google Scholar] [CrossRef]
- Zeng, T.; Zhang, H.; Moura, S.J.; Shen, Z.-J.M. Economic and Environmental Benefits of Automated Electric Vehicle Ride-Hailing Services in New York City. Sci. Rep. 2024, 14, 4180. [Google Scholar] [CrossRef]
- Le Hong, Z.; Zimmerman, N. Air Quality and Greenhouse Gas Implications of Autonomous Vehicles in Vancouver, Canada. Transp. Res. D Transp. Environ. 2021, 90, 102676. [Google Scholar] [CrossRef]



Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).