An Efficient Regenerative Braking System for Electric Vehicles Based on a Fuzzy Control Strategy


Abstract
1. Introduction
2. System Analysis and Modeling
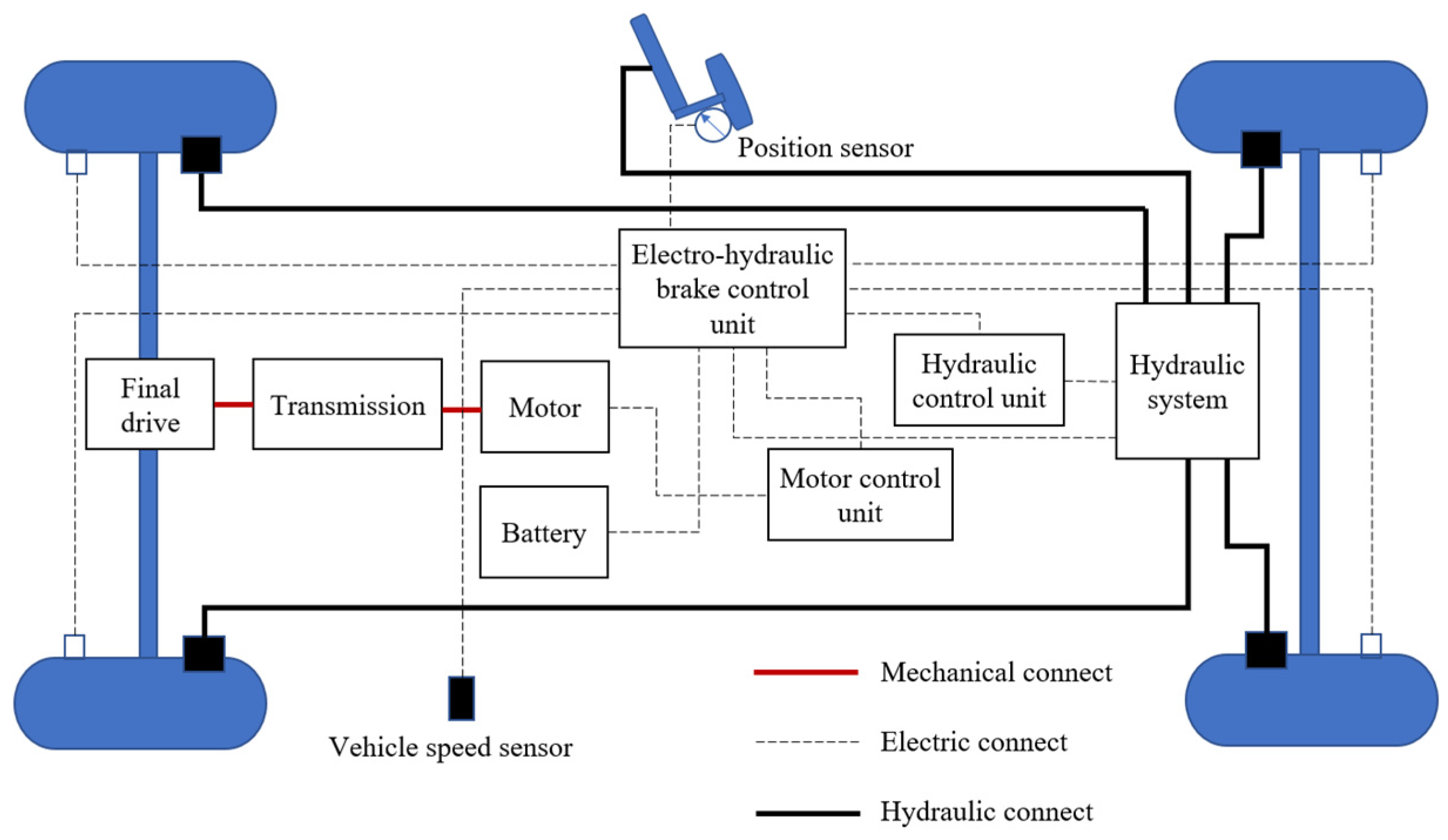
2.1. Blended Braking System
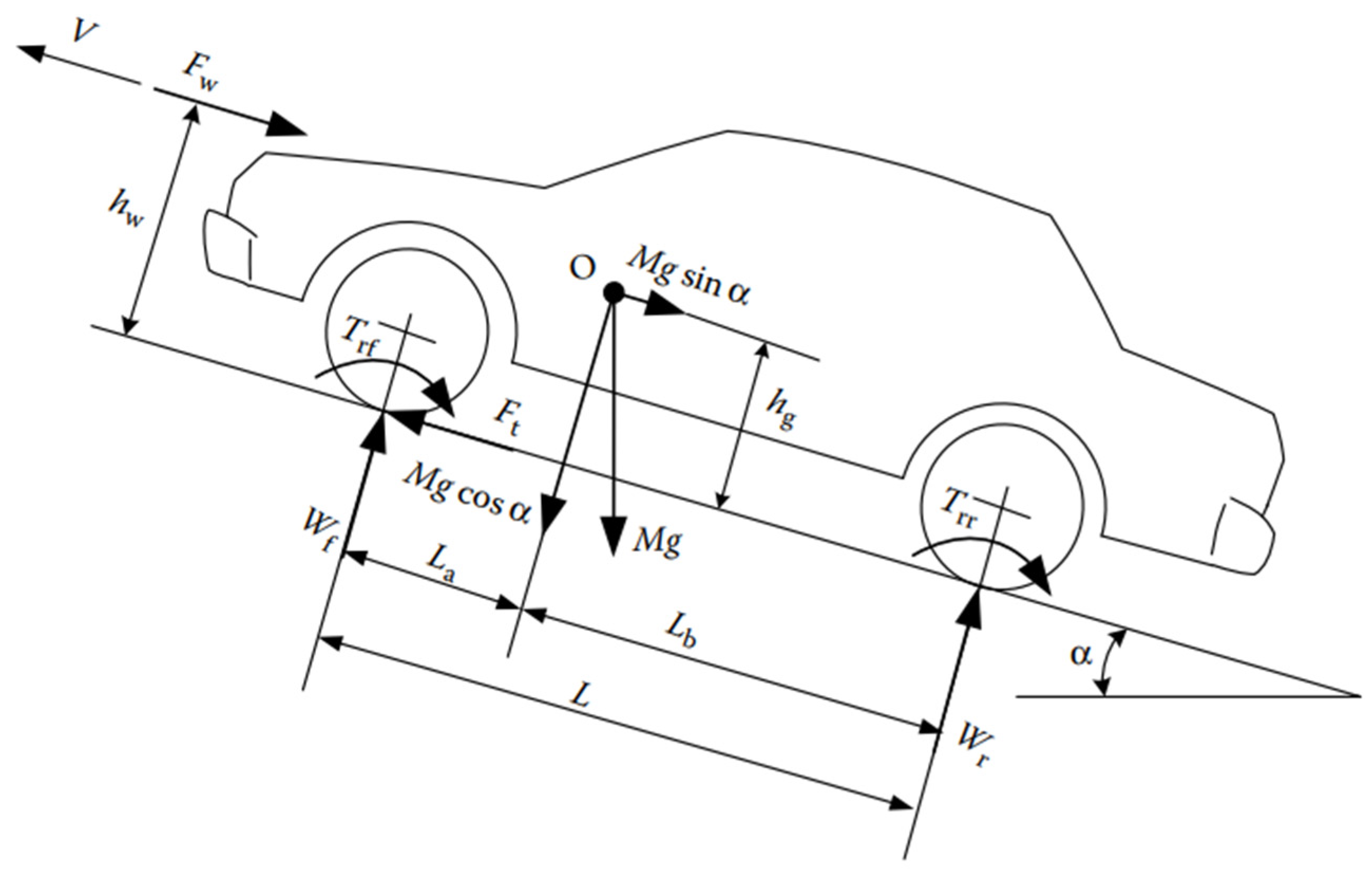
2.2. Electric Vehicle Dynamic Model
2.3. Vehicle Parameters
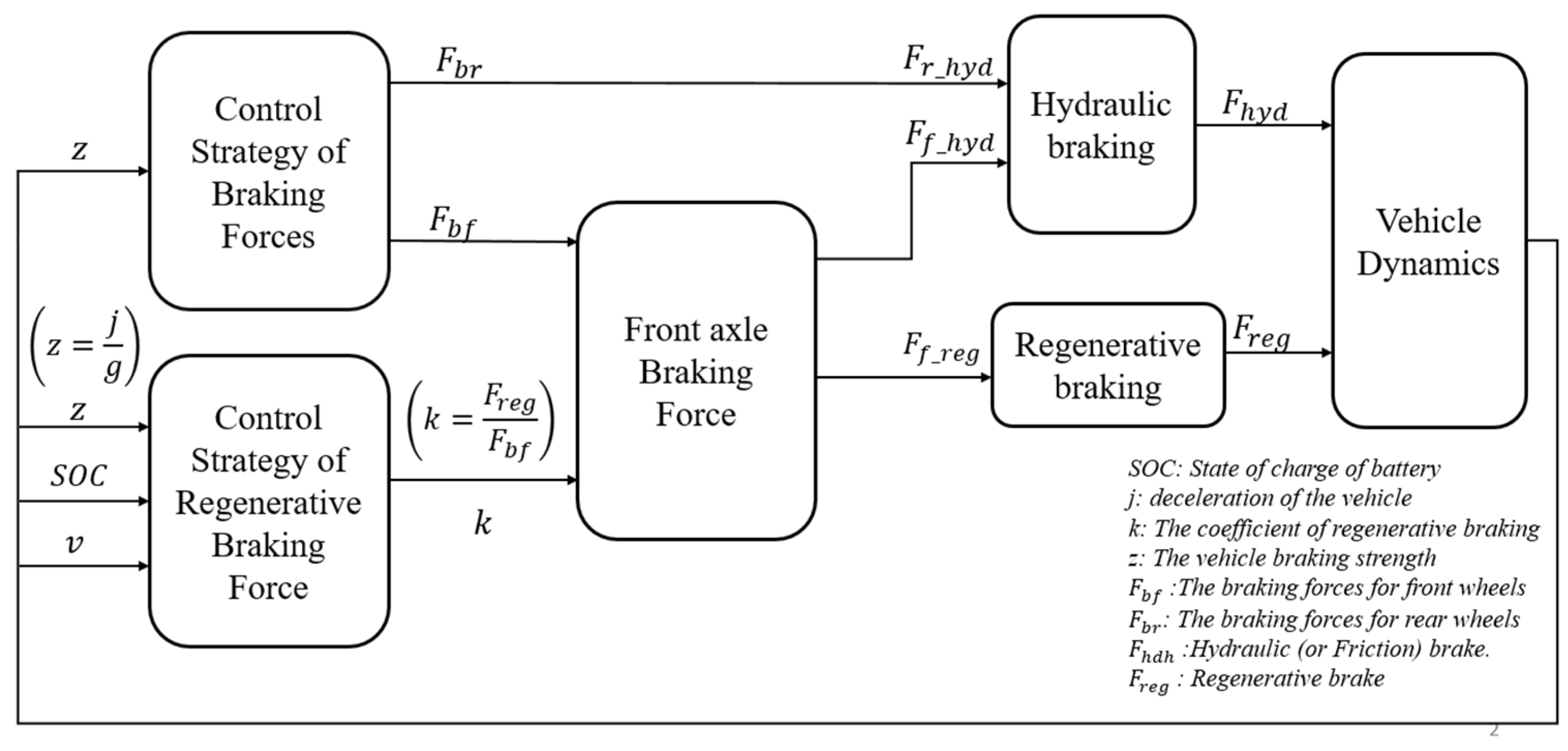
2.4. Control Strategy for Recovering Braking Energy
3. Controller Development
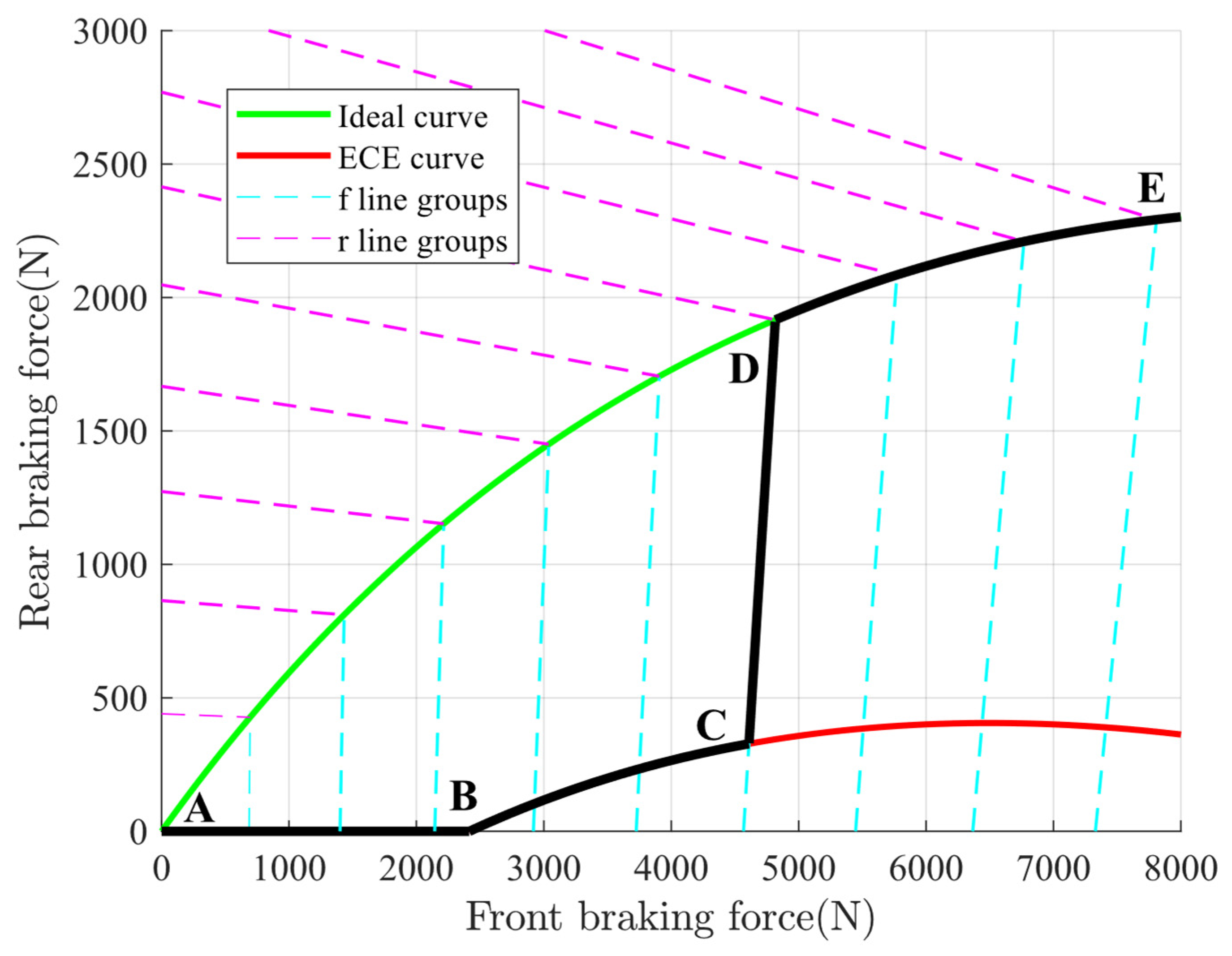
3.1. Braking Force Distribution for Front and Rear Axles
3.1.1. Front/Rear Braking Force Distribution Constraints
3.1.2. Design of Braking Force Distribution for Front and Rear Axles
3.2. Designing Controller Based on Fuzzy Logic
3.2.1. Design of Fuzzy Controller
3.2.2. Fuzzy Rules
3.2.3. Defuzzification
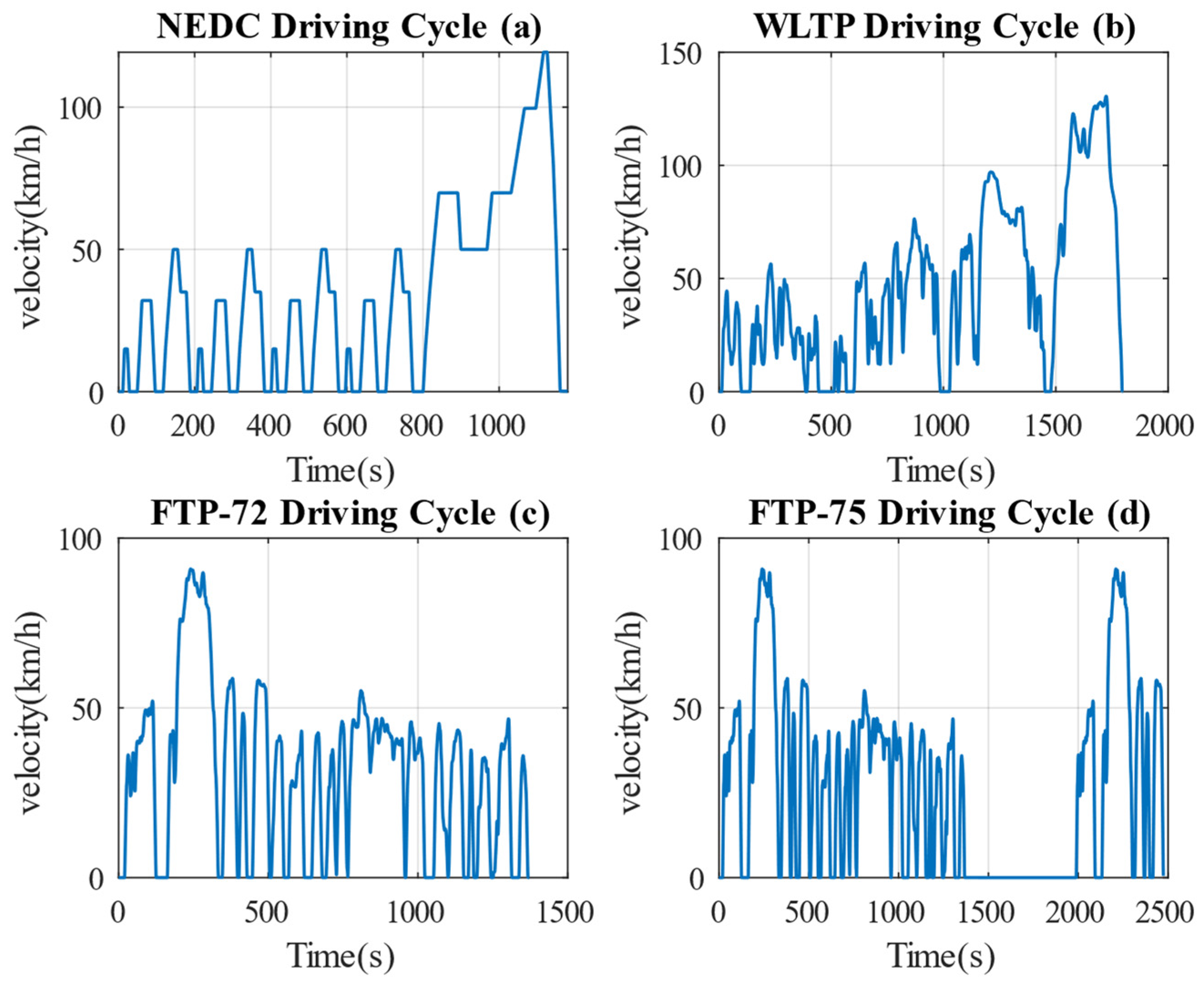
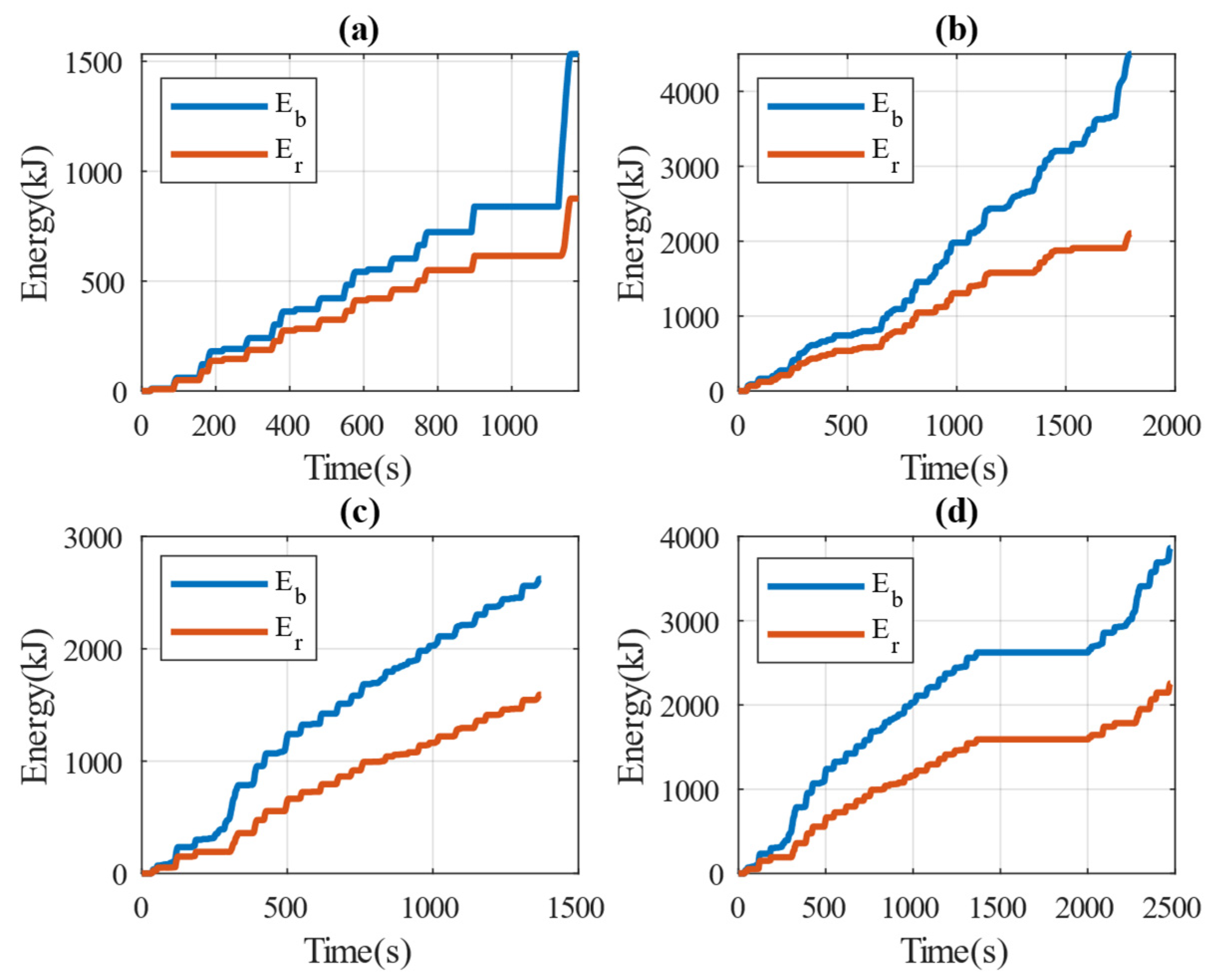
4. Simulation Result and Analysis
4.1. Simulation Analysis of Braking Energy Recovery Control Straregy for Electric Vehicles
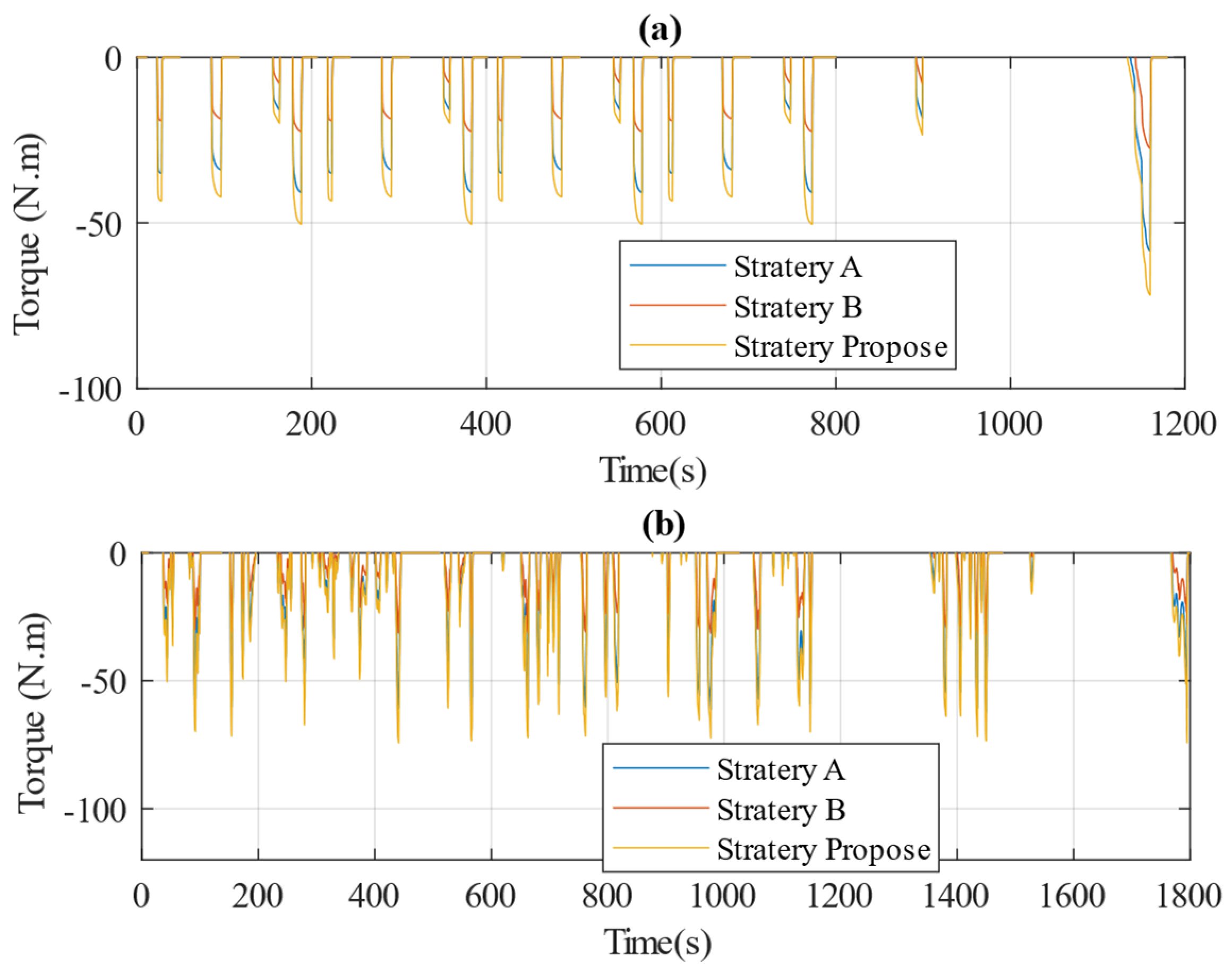
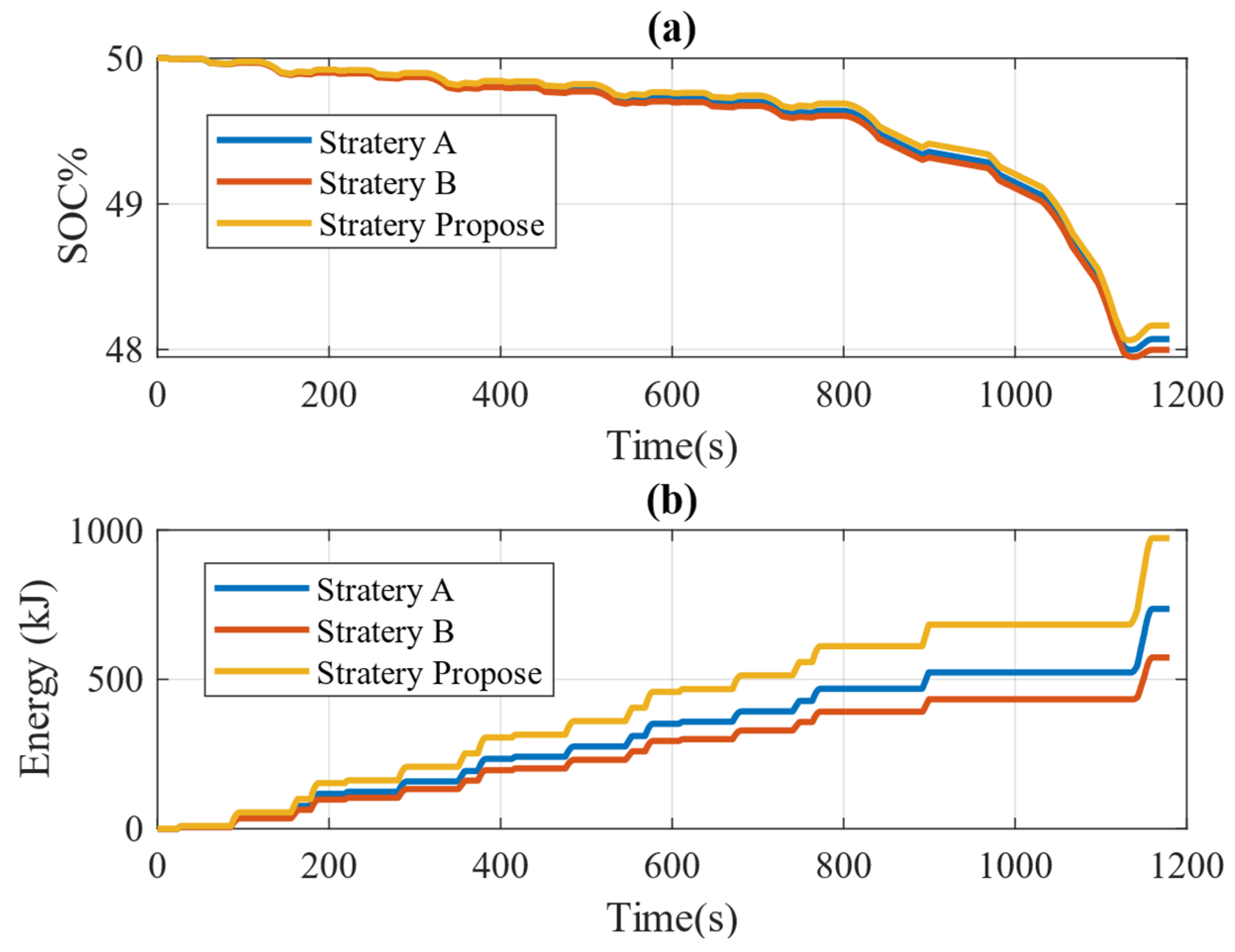
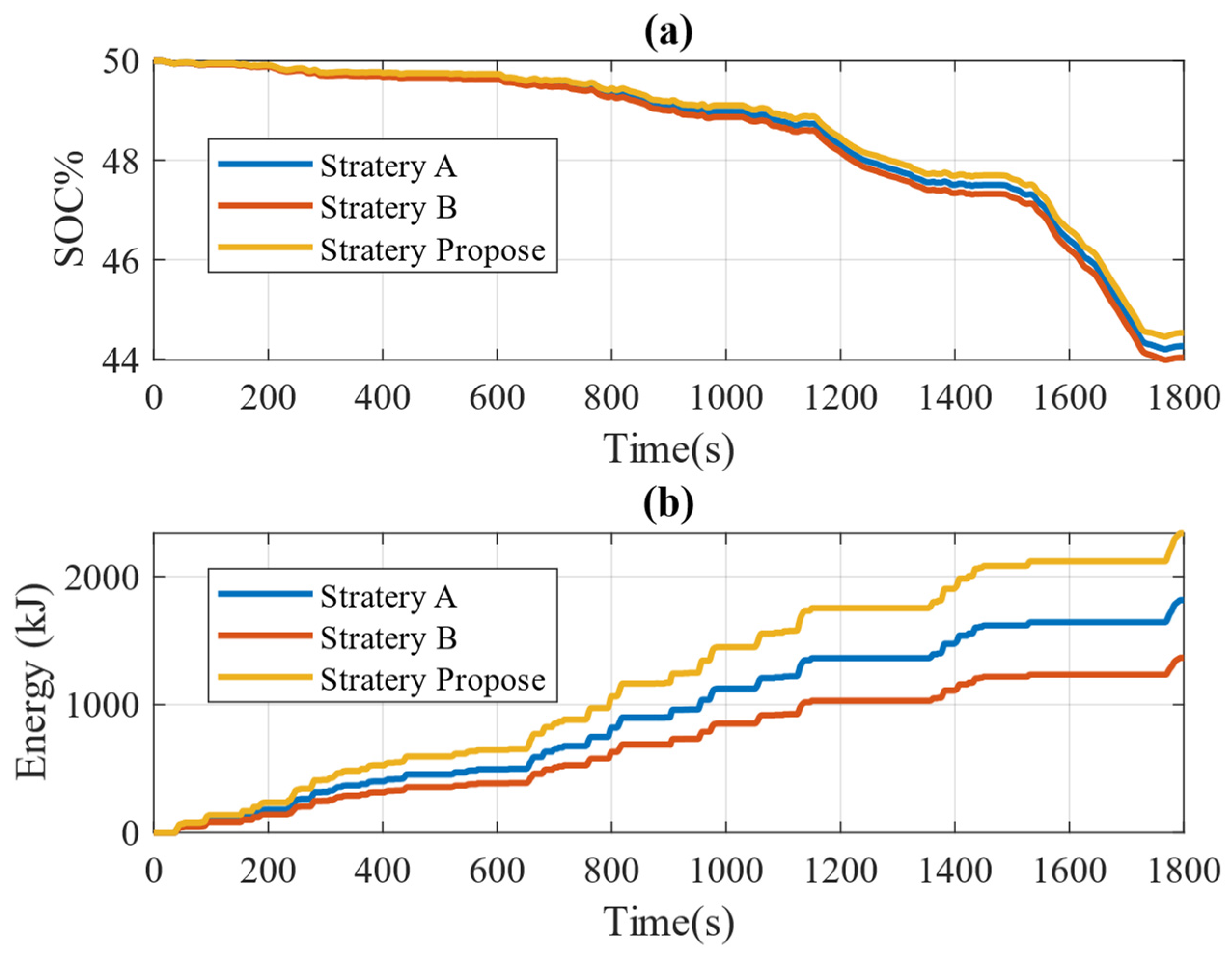
4.2. Comparative Simulation Results of Different Methods
- (1)
- NEDC condition:
- (2)
- WLTC condition:
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- U.S. Global Warming Gas Emissions By Economic Sector. Available online: https://www.global-impact-association.org/ (accessed on 12 June 2024).
- Eckert, J.J.; Barbosa, T.P.; da Silva, S.F.; Silva, F.L.; Silva, L.C.; Dedini, F.G. Electric hydraulic hybrid vehicle powertrain design and optimization-based power distribution control to extend driving range and battery life cycle. Energy Convers. Manag. 2022, 252, 115094. [Google Scholar] [CrossRef]
- Wang, C.; Zhao, W.; Li, W. Braking sense consistency strategy of electro-hydraulic composite braking system. Mech. Syst. Signal Process. 2018, 109, 196–219. [Google Scholar] [CrossRef]
- Ko, J.W.; Ko, S.Y.; Kim, I.S.; Hyun, D.Y.; Kim, H.S. Co-operative control for regenerative braking and friction braking to increase energy recovery without wheel lock. Int. J. Automot. Technol. 2014, 15, 253–262. [Google Scholar] [CrossRef]
- De Pinto, S.; Camocardi, P.; Chatzikomis, C.; Sorniotti, A.; Bottiglione, F.; Mantriota, G.; Perlo, P. On the comparison of 2-and 4-wheel-drive electric vehicle layouts with central motors and single-and 2-speed transmission systems. Energies 2021, 13, 3328. [Google Scholar] [CrossRef]
- Ju, J.; Li, W.; Liu, Y.; Zhang, C. Research on bifurcation and control of electromechanical coupling torsional vibration for wheel-side direct-driven transmission system. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2020, 235, 93–104. [Google Scholar] [CrossRef]
- Deepak, K.; Frikha, M.A.; Benômar, Y.; El Baghdadi, M.; Hegazy, O. In-wheel motor drive systems for electric vehicles: State of the art, challenges, and future trends. Energies 2023, 16, 3121. [Google Scholar] [CrossRef]
- Strohmaier, K.G.; Cronk, P.M.; Van de Ven, J.D. Design optimization of a hydraulic flywheel accumulator for a hydraulic hybrid vehicle. Int. J. Fluid Power 2015, 16, 149–162. [Google Scholar] [CrossRef]
- Raman, S.R.; Cheng, K.-W.; Xue, X.-D.; Fong, Y.-C.; Cheung, S. Hybrid energy storage system with vehicle body integrated super-capacitor and li-ion battery: Model, design and implementation, for distributed energy storage. Energies 2021, 14, 6553. [Google Scholar] [CrossRef]
- Garcia, F.; Ferreira, A.; Pomilio, J. Control strategy for battery-ultracapacitor hybrid energy storage system. In Proceedings of the 2009 Twenty-Fourth Annual IEEE Applied Power Electronics Conference and Exposition, Washington, DC, USA, 15–19 February 2009; pp. 826–832. [Google Scholar]
- Liang, J.; Feng, J.; Fang, Z.; Lu, Y.; Yin, G.; Mao, X.; Wu, J.; Wang, F. An energy-oriented torque-vector control framework for distributed drive electric vehicles. IEEE Trans. Transp. Electrif. 2023, 9, 4014–4031. [Google Scholar] [CrossRef]
- Berzi, L.; Delichristov, D.; Favilli, T.; Pierini, M.; Ponchant, M.; Qehajaj, A.; Pugi, L. Smart energy management of auxiliary load for electric vehicles. In Proceedings of the 2020 IEEE International Conference on Environment and Electrical Engineering and 2020 IEEE Industrial and Commercial Power Systems Europe (EEEIC/I&CPS Europe), Madrid, Spain, 9–12 June 2020; pp. 1–6. [Google Scholar]
- Wen, H.H.; Chen, W.; Hui, J. A single-pedal regenerative braking control strategy of accelerator pedal for electric vehicles based on adaptive fuzzy control algorithm. Energy Procedia 2018, 152, 624–629. [Google Scholar] [CrossRef]
- Pugi, L.; Favilli, T.; Berzi, L.; Locorotondo, E.; Pierini, M. Brake blending and torque vectoring of road electric vehicles: A flexible approach based on smart torque allocation. Int. J. Electr. Hybrid Veh. 2020, 12, 87. [Google Scholar] [CrossRef]
- Qiu, C.; Wang, G.; Meng, M.; Shen, Y. A novel control strategy of regenerative braking system for electric vehicles under safety critical driving situations. Energy 2018, 149, 329–340. [Google Scholar] [CrossRef]
- Wu, Y.; Shu, M.; Ge, H. Research on brake force distribution control strategy of electric vehicle subtitle as needed. IOP Conf. Series Mater. Sci. Eng. 2018, 452, 032054. [Google Scholar] [CrossRef]
- Xin, Y.; Zhang, T.; Zhang, H.; Zhao, Q.; Zheng, J.; Wang, C. Fuzzy logic optimization of composite brake control strategy for load-isolated electric bus. Math. Probl. Eng. 2019, 2019, 1–14. [Google Scholar] [CrossRef]
- U.S. Department of Energy. 2013 Nissan Leaf Advanced Vehicle Testing—Baseline Testing Results; United States Department of Energy: Washington, DC, USA, 2014.
- Zhou, J.; Sun, J.; He, L.; Ding, Y.; Cao, H.; Zhao, W. Control oriented prediction of driver brake intention and intensity using a composite machine learning approach. Energies 2019, 12, 2483. [Google Scholar] [CrossRef]
- Ehsani, M.; Gao, Y.; Longo, S.; Ebrahimi, K. Modern Electric, Hybrid Electric, and Fuel Cell Vehicles; CRC Press: Boca Raton, FL, USA, 2018. [Google Scholar]
- Itani, K.; de Bernardinis, A.; Khatir, Z.; Jammal, A. Comparison between Two Braking Control Methods Integrating Energy Recovery for a Two G wheel Front Driven Electric Vehicle. Energy Convers. Manag. 2016, 122, 330–343. [Google Scholar] [CrossRef]
- Ali, O.A.M.; Ali, A.Y.; Sumait, B.S. Comparison between the effects of different types of membership functions on fuzzy logic controller performance. Int. J. 2015, 76, 76–83. [Google Scholar]
- Vodovozov, V.; Raud, Z.; Petlenkov, E. Review on braking energy management in electric vehicles. Energies 2021, 14, 4477. [Google Scholar] [CrossRef]
- Bezak, N.; Brilly, M.; Šraj, M. Comparison between the peaks-over-threshold method and the annual maximum method for flood frequency analysis. Hydrol. Sci. J. 2014, 59, 959–977. [Google Scholar] [CrossRef]
- Liu, X. Parameterized defuzzification with maximum entropy weighting function—Another view of the weighting function expectation method. Math. Comput. Model. 2007, 45, 177–188. [Google Scholar] [CrossRef]
- Yin, Z.; Ma, X.; Su, R.; Huang, Z.; Zhang, C. Regenerative braking of electric vehicles based on fuzzy control strategy. Processes 2023, 11, 2985. [Google Scholar] [CrossRef]
- Geng, C.; Ning, D.; Guo, L.; Xue, Q.; Mei, S. Simulation research on regenerative braking control strategy of hybrid electric vehicle. Energies 2021, 14, 2202. [Google Scholar] [CrossRef]
- Xu, G.; Li, W.; Xu, K.; Song, Z. An intelligent regenerative braking strategy for electric vehicles. Energies 2011, 4, 1461–1477. [Google Scholar] [CrossRef]
- Guo, J.; Wang, J.; Cao, B. Regenerative braking strategy for electric vehicles. In Proceedings of the 2009 IEEE Intelligent Vehicles Symposium, Xi’an, China, 3–5 June 2009; pp. 864–868. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Description | Symbol | Value | Unit | |
|---|---|---|---|---|
| Vehicle | Mass | 1250 | kg | |
| Gravity | 9.81 | P | ||
| Distance from the front axle to center of mass | 1.04 | m | ||
| Distance from the rear axle to center of mass | 1.56 | m | ||
| Wheelbase | 2.6 | m | ||
| Position of center | 0.48 | |||
| Tire rolling radius | r | 0.3 | m | |
| Motor | Continuous power | 50 | ||
| Peak power | 100 | |||
| Continuous speed | 3000 | |||
| Max speed | 10,000 | |||
| Continuous torque | 136 | |||
| Peak torque | 330 | |||
| Battery | Rated voltage | 336 | V | |
| Battery capacity | 270 | Ah |
| Input | Output | Input | Output | Input | Output | Input | Output | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| z | SOC | v | k | z | SOC | v | k | z | SOC | v | k | z | SOC | v | k |
| L | L | L | SH | M | L | L | SH | H | L | L | H | SH | L | L | M |
| M | SH | M | H | M | M | M | M | ||||||||
| H | H | H | M | H | M | H | L | ||||||||
| SH | M | SH | L | SH | L | SH | SL | ||||||||
| M | L | SH | M | L | H | M | L | M | M | L | M | ||||
| M | H | M | M | M | M | M | L | ||||||||
| H | M | H | L | H | L | H | L | ||||||||
| SH | L | SH | L | SH | L | SH | SL | ||||||||
| H | L | SH | H | L | H | H | L | M | H | L | L | ||||
| M | H | M | H | M | L | M | L | ||||||||
| H | M | H | M | H | L | H | SL | ||||||||
| SH | L | SH | M | SH | SL | SH | SL | ||||||||
| SH | L | H | SH | L | H | SH | L | M | SH | L | L | ||||
| M | M | M | M | M | L | M | SL | ||||||||
| H | L | H | L | H | SL | H | SL | ||||||||
| SH | SL | SH | SL | SH | SL | SH | SL | ||||||||
| Driving Cycle | No Regenerative Braking | Regenerative Braking | ||||
|---|---|---|---|---|---|---|
| NEDC | 50 | 47.83 | 2.17 | 50 | 48.16 | 1.84 |
| WLTP | 50 | 43.72 | 6.25 | 50 | 44.52 | 5.48 |
| FTP72 | 50 | 47.83 | 2.17 | 50 | 48.44 | 1.56 |
| FTP75 | 50 | 46.58 | 3.42 | 50 | 47.44 | 2.56 |
| Control Strategy | Strategy A | Strategy B | Strategy Propose | |||
|---|---|---|---|---|---|---|
| NEDC | WLTP | NEDC | WLTP | NEDC | WLTP | |
| Total energy consumption of vehicles (kJ) | 5605.5 | 16,507 | 5819 | 17,156 | 5337.4 | 15,753 |
| Total braking energy (kJ) | 1533.4 | 4498.6 | 1533.4 | 4498.6 | 1533.4 | 4498.7 |
| Energy recovered by braking (kJ) | 662.6 | 1635.2 | 515.99 | 1228.7 | 875.7 | 2105.3 |
| Effective energy recovery rate (%) | 11.8 | 9.9 | 8.8 | 7.1 | 16.4 | 13.36 |
| Braking energy recovery rate (%) | 43.2 | 36.3 | 33.6 | 27.3 | 57.1 | 46.8 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Anh, N.T.; Chen, C.-K.; Liu, X. An Efficient Regenerative Braking System for Electric Vehicles Based on a Fuzzy Control Strategy. Vehicles 2024, 6, 1496-1512. https://doi.org/10.3390/vehicles6030071
Anh NT, Chen C-K, Liu X. An Efficient Regenerative Braking System for Electric Vehicles Based on a Fuzzy Control Strategy. Vehicles. 2024; 6(3):1496-1512. https://doi.org/10.3390/vehicles6030071
Chicago/Turabian StyleAnh, Nguyen Thi, Chih-Keng Chen, and Xuhui Liu. 2024. "An Efficient Regenerative Braking System for Electric Vehicles Based on a Fuzzy Control Strategy" Vehicles 6, no. 3: 1496-1512. https://doi.org/10.3390/vehicles6030071
APA StyleAnh, N. T., Chen, C.-K., & Liu, X. (2024). An Efficient Regenerative Braking System for Electric Vehicles Based on a Fuzzy Control Strategy. Vehicles, 6(3), 1496-1512. https://doi.org/10.3390/vehicles6030071