1. Introduction
Vehicle technology has made significant strides, with internal combustion engine (ICE) vehicles evolving to comply with increasingly stringent emissions regulations. Innovations such as engine downsizing, turbocharging, and electrification offer multiple pathways to improve fuel economy [
1]. However, achieving compliance requires more efficient vehicle propulsion systems. The European Parliament’s “Fit for 55” policy aims to eliminate fossil-fuel-powered vehicles from EU sales by 2035, promoting only fully electric and e-fuel vehicles. Similar regulations in other major countries highlight an irreversible shift toward electrified vehicle propulsion systems.
In collaboration with FedEx Express, NERL evaluated emissions reductions between gasoline hybrid electric vehicles (HEVs) and diesel-powered parcel delivery trucks. The study found that HEVs reduced nitrogen oxide (NOx) emissions by 75–89% and particulate matter emissions by 99% compared to diesel trucks while maintaining similar fuel economy [
2]. Although HEVs provide significant improvements, they still fall short of stringent regulations, particularly for commercial vehicles. Research indicates that the cost of battery electric vehicles (BEVs) will drop by 25% by 2050 compared to 2020, while ICE vehicle costs will exceed those of BEVs by 2030 [
3]. These trends underscore the need for efficient propulsion systems in commercial vehicles.
Key technologies such as regenerative braking capture and reuse kinetic energy lost during braking, potentially extending electric vehicle (EV) driving range by 8–25% [
4]. One-pedal drive (OPD) technology, often found in EVs, enhances driving efficiency by combining energy recuperation and braking. Studies have demonstrated that OPD can yield up to 22% energy savings in urban driving scenarios for passenger vehicles compared to standard driving modes [
5,
6]. As OPD matures, its application has expanded beyond passenger vehicles, and when implemented in electric buses, it has improved energy savings by 10–13% during urban traffic [
7]. Despite these advances, real-world testing faces challenges in reproducing results due to the influences of temperature, traffic, road conditions, and driver behavior.
Therefore, evaluating the efficiency and energy consumption of commercial vehicles necessitates reliable models and simulation tools that can offer controlled environments. Precise modeling, simulation, and validation of electric vehicle (EV) powertrains are vital for making crucial design and control decisions in high-performance vehicle designs [
8].
EV modeling requires a multidisciplinary approach integrating both electric components and powertrain systems to enhance energy control strategies and reduce energy consumption [
9]. For example, Adegbohun et al. [
8] describes a method that combines software simulation with real vehicle testing to boost development efficiency, reliability, and performance. Similarly, Rus et al. [
10] discusses the use of MATLAB Simulink for the design and mathematical modeling of an electric vehicle driveline, aiming to optimize efficiency, performance, and safety in a small off-road vehicle. Moreover, Schaltz and Soylu [
11] details a method for designing an EV power system to meet driving range and acceleration requirements while minimizing energy consumption and costs.
Additionally, Rodriguez [
12] investigated the impact of driving behavior on the energy consumption of battery electric vehicles (BEVs) in different traffic conditions. The results indicated that adjusting driving aggressiveness based on traffic conditions maximizes battery life and vehicle range.
Existing models emphasize vehicle performance, dynamics, and fuel efficiency, addressing the limitations of on-road tests.
Table 1 outlines various vehicle models and their specialized capabilities in vehicle simulations. As electrification becomes crucial for commercial vehicles, precise assessment of power consumption and energy efficiency is essential for meeting future emissions standards.
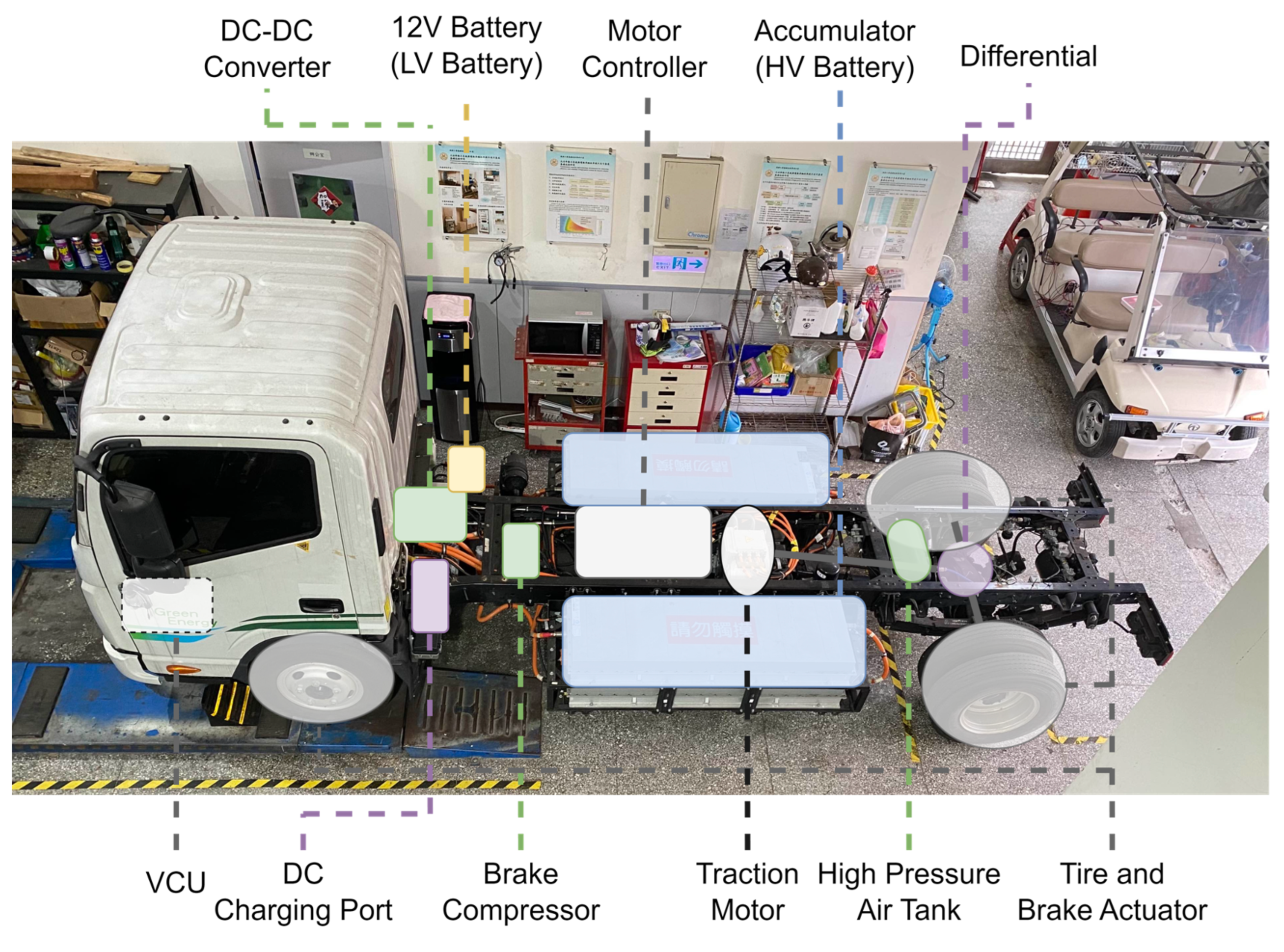
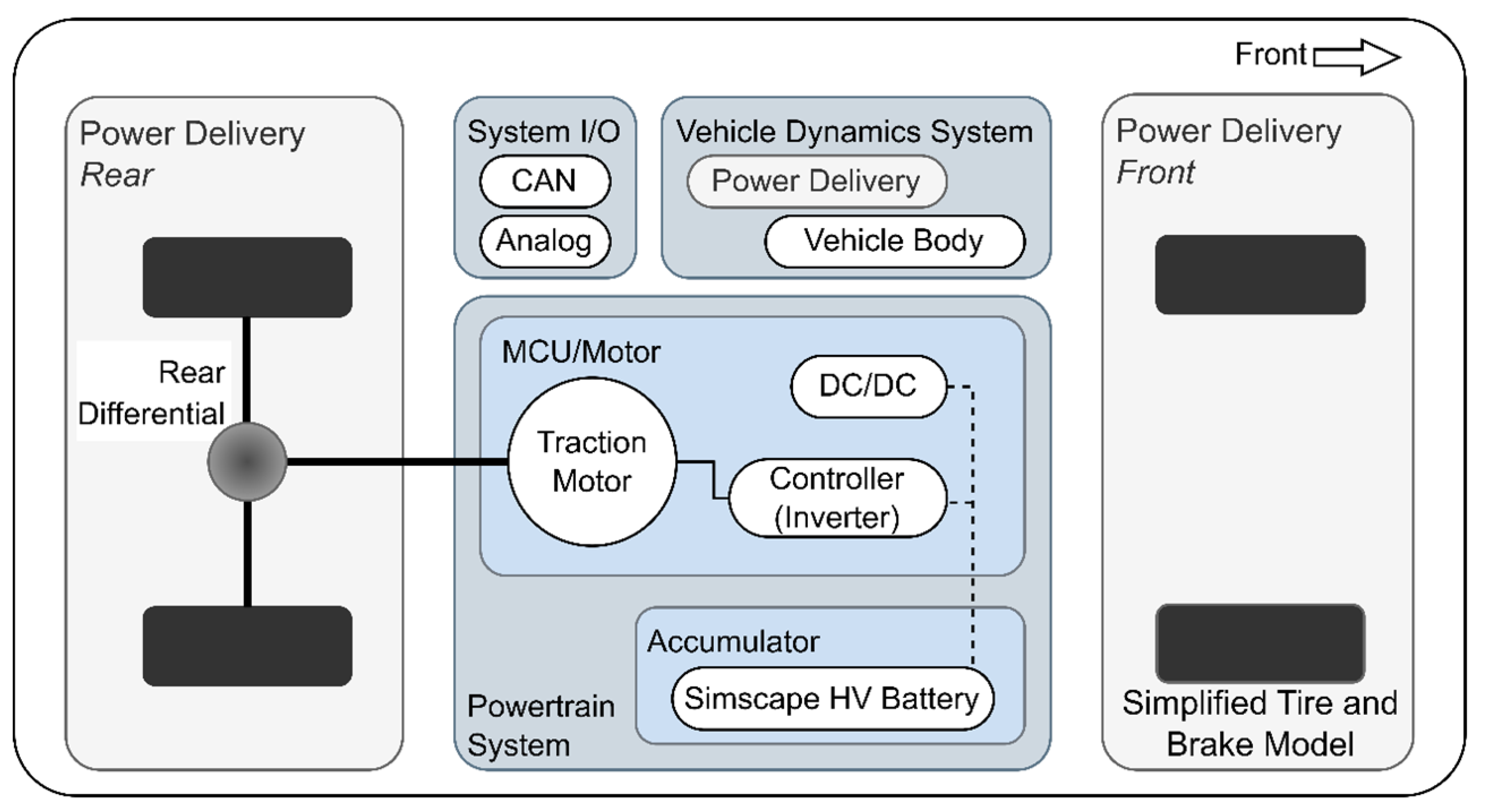
Despite the range of existing vehicle models, none provide an open-source framework with the flexibility to incorporate emerging technologies. This research addresses this gap by developing an open-source vehicle model using MATLAB/Simulink R2022b Update 4 to simulate overall power consumption and the driving mileage achievable in a battery electric truck under various configurations. Detailed parameters of the truck will be introduced in subsequent sections. The model is based on three validated powertrain systems for the target electric truck and simulates two customized daily drive scenarios across multiple configuration combinations. By blending commercial vehicle analysis, open-source modeling, and scenario-based simulation, this approach serves as an illustrative example for both educational and commercial applications.
In the following sections,
Section 2, Model Construction, provides an overview of the target vehicle and its Simulink model.
Section 3, Simulation Scenarios, describes the proposed configurations and driving scenarios.
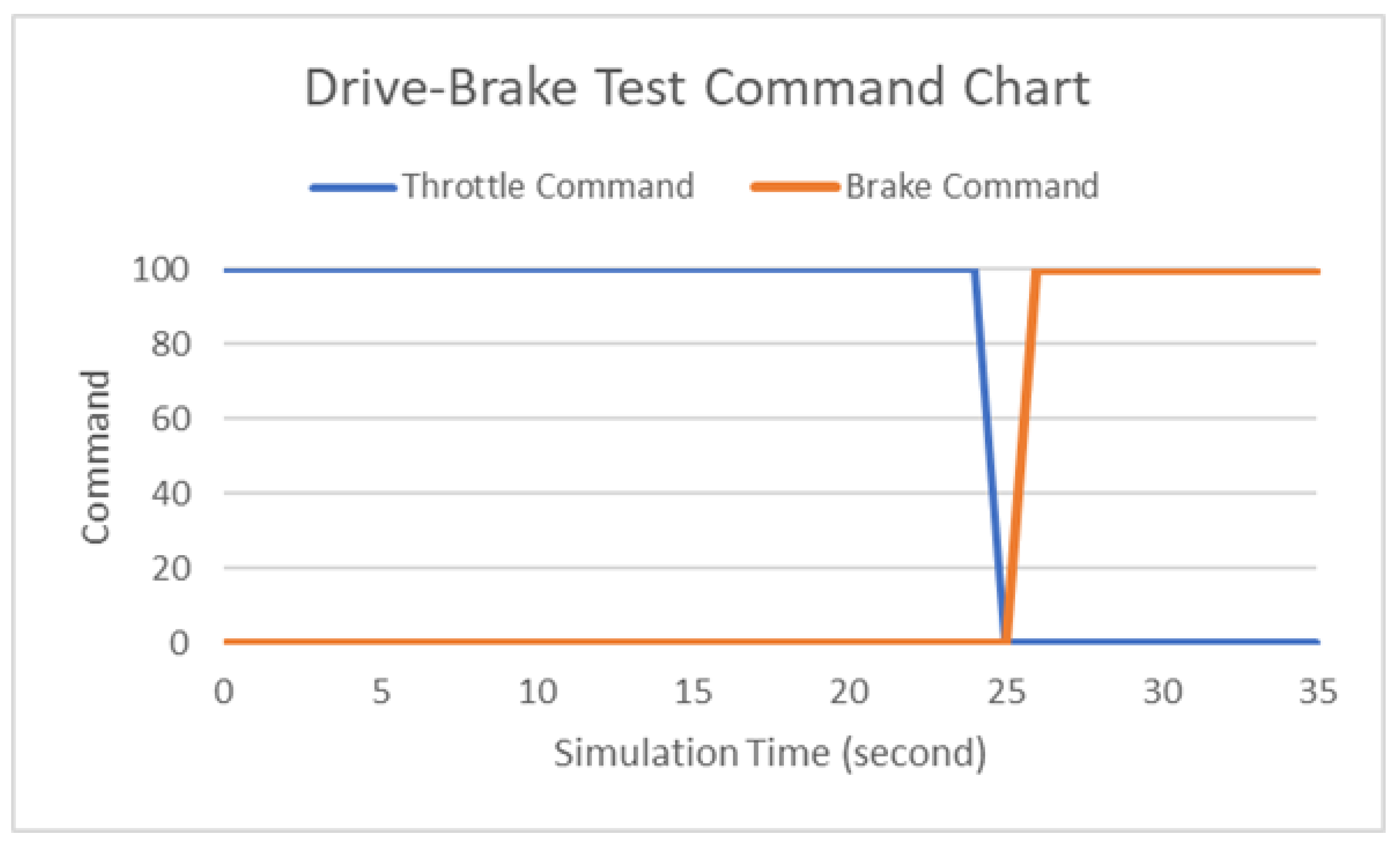
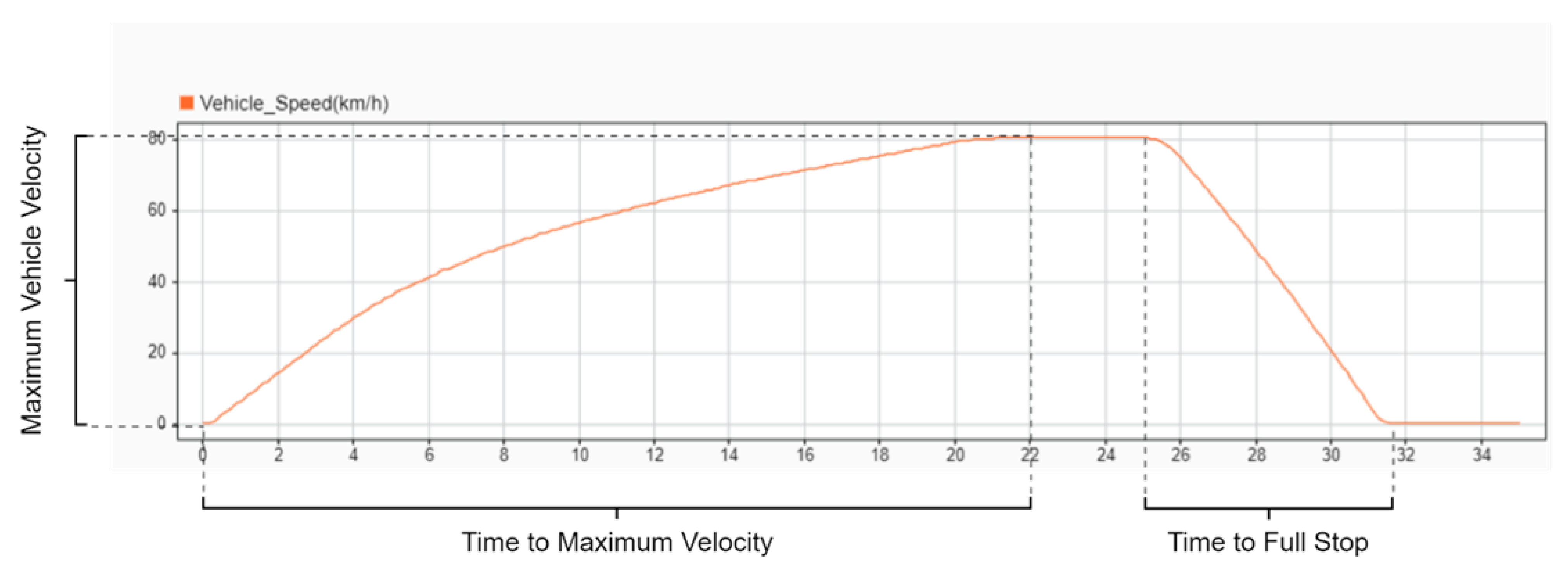
Section 4, Vehicle Model Validation, introduces the scenarios used to validate vehicle models and controllers, which provide test conditions for validation testing of vehicle performance and control strategies and show the validation results of the proposed vehicle model.
Section 5, Results and Observations, presents the simulation outcomes and emphasizes mileage improvements achieved through optimized configurations.
Section 6, Conclusion and Discussions, summarizes the findings on enhancing electric truck efficiency and explores the in-the-loop applications of the model. The open-source model data are included in
Appendix A.
6. Concluding Remarks
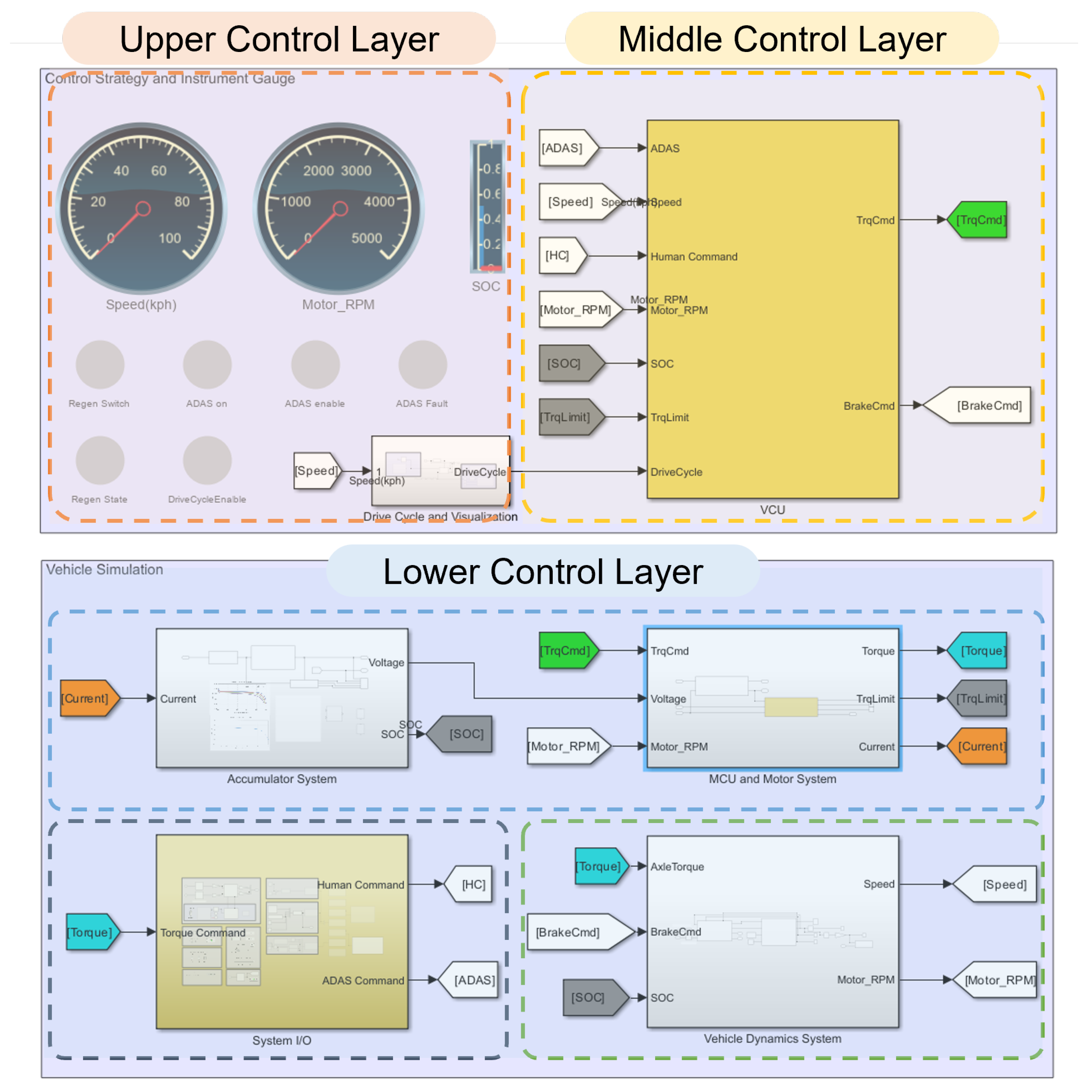
This study developed a versatile electric truck model in MATLAB/Simulink featuring multiple powertrain options and advanced vehicle controls, including regenerative braking, one-pedal drive (OPD), and adaptive cruise control. The simulation results demonstrate the significant impact of vehicle configurations on power consumption and mileage across various scenarios. Notably, regenerative braking offers enhanced energy economy, reduces mechanical brake wear, and shows promise for integration with OPD. However, optimizing regenerative braking algorithms to accommodate diverse powertrain options and maximize efficiency remains a challenge. The simulations incorporate real-world driving scenarios to align closely with actual conditions, enhancing the model’s applicability.
The effectiveness of this open-source vehicle model in evaluating performance and energy consumption is confirmed. It also facilitates the verification of user-developed functions and algorithms through its visualization interface. The in-the-loop functionalities, depicted in
Figure 14, extend its capabilities. The driver-in-the-loop (DiL) concept allows for the simulation of vehicle controllers with virtual drivers in an interactive environment, streamlining the validation process and enabling the development of controllers via user feedback. This approach is safer, more cost-effective, and more controlled compared to real-world vehicle tests.
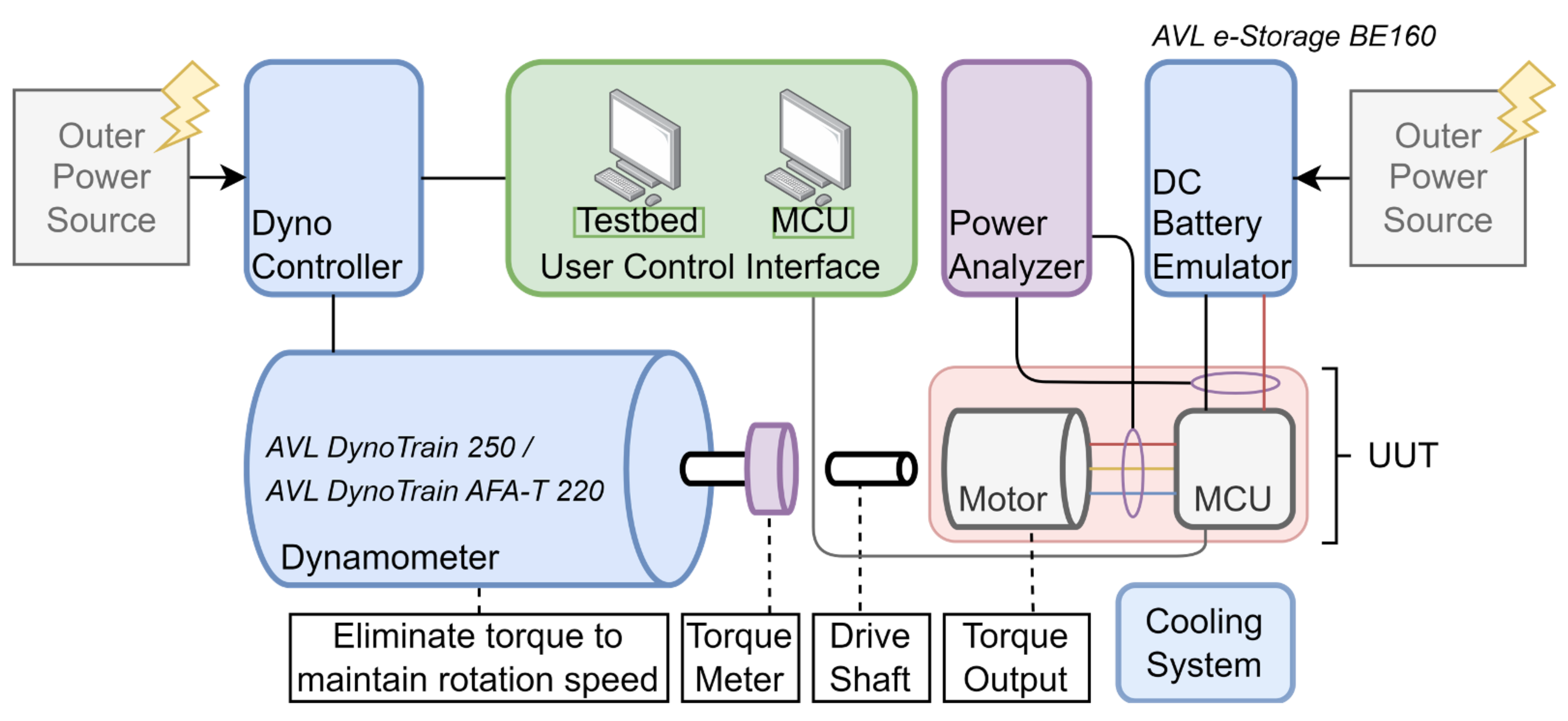
Additionally, the hardware-in-the-loop (HiL) method supports real-time validation of adaptive cruise control algorithms by integrating actual sensors and a Simulink-based controller model with the physical vehicle body. Utilizing CAN bus communication for system control, this setup bridges the gap from model-in-the-loop simulations to real-time hardware testing, enabling comprehensive assessment of user-defined controllers with minimal hardware requirements. The HiL methodology enhances the co-simulation capabilities across various driver profiles and hardware configurations using a real-world test bench.
In conclusion, the developed vehicle model and its robust in-the-loop functionalities provide a powerful tool for evaluating vehicle performance, energy consumption, and advanced control algorithms, effectively bridging the gap between theoretical simulations and practical implementation. This open-source model stands to significantly shorten research and development cycles for vehicles, particularly commercial trucks, within the research community.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}