1. Introduction
Off-road vehicles play a pivotal role in industries such as agriculture, mining, and construction, as highlighted by the European Commission [
1]. These vehicles operate in challenging environments, facing terrains that demand efficient energy usage for optimal performance [
2]. Electric off-road vehicles face limitations in energy storage and consumption due to the nature of battery technology [
3]. This results in a need for efficient utilization of available energy to enhance operational range and minimize downtime. Traditional path-planning methods primarily focused on the shortest distance or time [
4]. However, these methods might not consider energy efficiency as a primary criterion, especially in off-road scenarios. Energy-efficient path planning aims to optimize resource usage, ensuring vehicles operate within their energy constraints while completing tasks [
5]. Reducing energy consumption aligns with sustainability goals reducing carbon emissions and environmental impact [
6]. Optimizing energy usage reduces operational costs by minimizing recharging frequency and maintenance expenses [
7]. Research on energy-efficient path planning drives advancements in algorithms and technologies for vehicles, leading to smarter and more adaptable vehicles [
8]. Efficient energy usage contributes to vehicle reliability, ensuring safe operations even in remote or challenging locations [
9]. Energy-efficient path planning is a multidisciplinary field, drawing from robotics, vehicle dynamics, and optimization strategies. Studies like those referenced showcase the growing importance of considering energy efficiency as a fundamental criterion in path planning for off-road vehicles. Such considerations have significant implications for sustainability, cost-effectiveness, technological innovations, and the overall reliability of off-road vehicle operations.
Off-road tracked electric vehicles are designed with tracks or treads for mobility, providing enhanced traction and stability in rough terrains [
10]. They typically integrate electric propulsion systems powered by batteries, offering quieter operation and reduced emissions compared to traditional combustion-powered vehicles [
11]. Tracked electric vehicles excel in traversing challenging landscapes like mud, sand, or steep inclines due to their superior traction and low ground [
12]. These vehicles often exhibit greater maneuverability and stability compared to their wheeled counterparts, making them ideal for off-road operations in various industries [
13]. The electric propulsion system in these vehicles typically consists of electric motors powered by batteries, providing torque and power to drive the tracks [
13]. Studies by Everitt et al. showcase the advancements in electric propulsion for tracked vehicles in military contexts [
14]. Off-road tracked electric vehicles find applications in agriculture, mining, forestry, military, and even recreational activities due to their adaptability and versatility [
13]. Their ability to navigate challenging terrains makes them suitable for tasks such as hauling heavy loads, exploration, and accessing remote or rugged areas [
13].
Off-road environments often pose challenges like uneven terrain, slopes, and unpredictable conditions that demand efficient energy utilization [
15]. While the road options on the highway are limited, the road options on off-road terrain depend on the limits of the vehicle and include many options. Therefore, although energy consumption on the highway generally depends on driving characteristics, the choice of the route to be taken in off-road terrain also constitutes the biggest source of energy consumption. Steep slopes have the potential to diminish the grip between the track and the ground, thereby necessitating a greater amount of power to sustain forward motion. Consequently, the powertrain of the vehicle is compelled to exert more effort to counteract the gravitational forces, leading to an escalation in energy consumption. Moreover, off-road driving frequently entails sudden acceleration and braking maneuvers to navigate through obstacles or negotiate steep inclines and declines. These rapid alterations in speed give rise to energy losses as a result of the frequent transitions between kinetic and potential energy. During acceleration, energy is expended, while, during braking, it must be dissipated as heat. This variability in driving conditions can lead to suboptimal engine performance, thereby diminishing the overall efficiency of the powertrain and augmenting energy consumption. Optimizing energy consumption ensures that vehicles can perform tasks effectively, minimizing interruptions due to recharging or refueling. Efficient energy usage extends the operational range of off-road vehicles, crucial in industries like mining or agriculture where vehicles cover vast areas [
16]. Studies about advanced powertrain control strategies focus on methods to extend range without compromising productivity [
17]. Energy-efficient vehicles lower operating costs by reducing fuel or electricity consumption and these cost savings are especially critical in industries with high fuel/electricity expenses, contributing to overall profitability.
The management of energy holds significant importance in the domain of ground vehicles. These vehicles often navigate complex off-road terrains, where energy consumption poses limitations on their operational range and duration. Researchers have delved into research on energy storage technology, electrical machine control techniques, and internal combustion engine advancements to enhance energy efficiency in this context [
18].
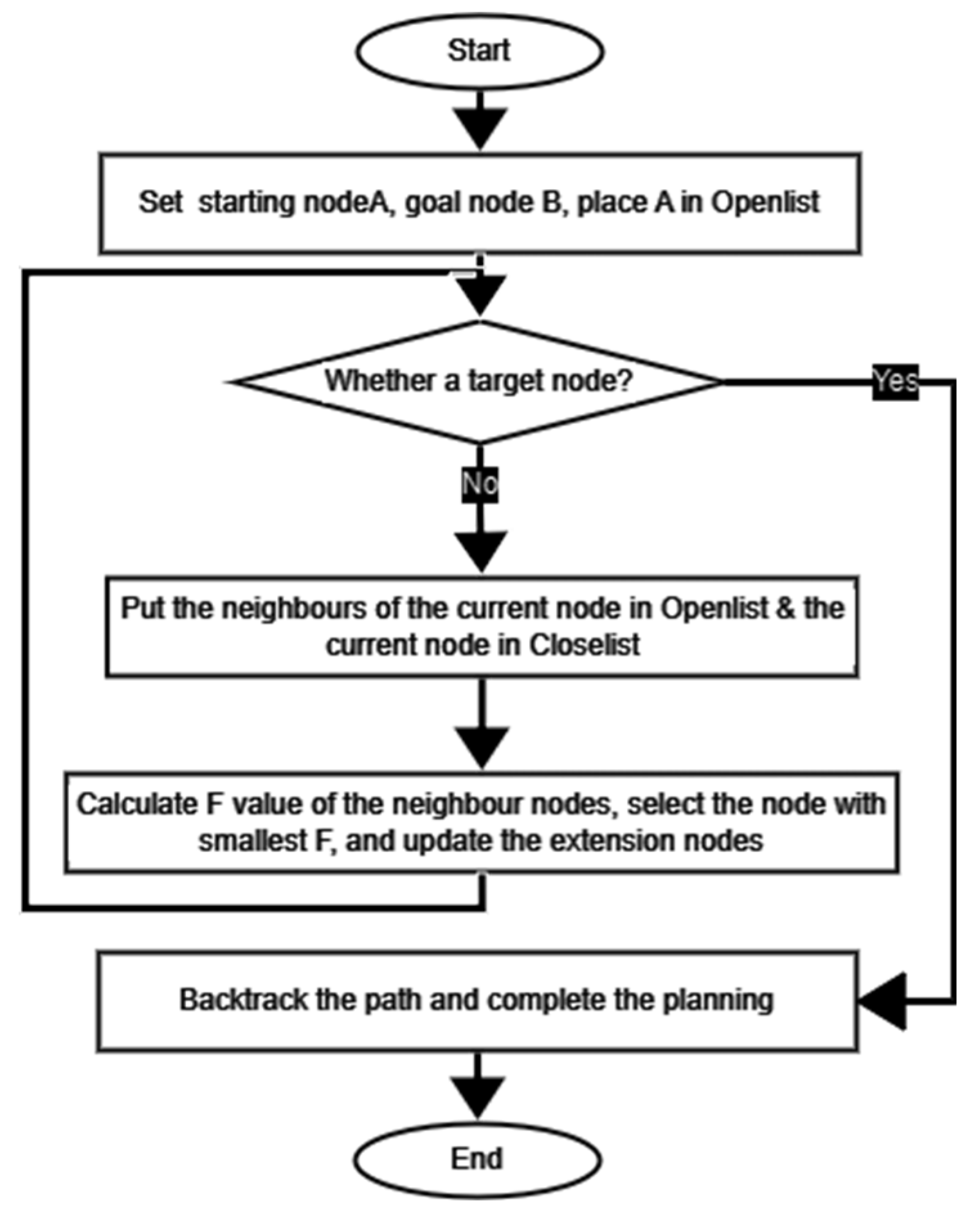
A range of commonly used path planning algorithms including the A-star algorithm and Dijkstra’s algorithm is specifically developed to determine the closest route in the grid map, thinking of cost as a distance to the neighbor nodes on the grid map. In the A-star algorithm, to improve performance in the algorithm, a priority is given to the neighbor who is akin to the destination. It allows minimizing the area to be explored and time during the path planning. Some other algorithms, for example, Probabilistic Roadmap, work with the same principle as Dijkstra’s algorithm but sampling nodes in free space and connecting them directly to calculate the cost. In the literature, there are numerous optimization approaches, including grey wolf, ant colony, particle swarm, and bat optimization algorithms, that have been proposed [
19].
In prior studies, researchers focused on enhancing obstacle avoidance and path smoothness. Szczepanski et al. introduced a local path-planning algorithm incorporating future movement prediction into an artificial potential field to enhance obstacle avoidance, also proposing virtual obstacles, known as “top quarks”, to prevent unsmooth and oscillating motion caused by local minima. However, the algorithm’s robustness and practical applicability were not fully addressed, necessitating further validation in diverse real-world scenarios [
19]. Additionally, Al-Ansarry and colleagues combined the Dijkstra algorithm with potential field collision avoidance to generate multiple paths in real time, aiming to identify the safest and most efficient one. Nevertheless, increased computational complexity could hinder its real-time applicability, especially for resource-constrained systems [
20].
In previous research, efforts were made to address terrain adaptation and slope navigation challenges. Ganganath and colleagues presented a heuristic path planner for wheeled robots considering friction, climbing capability, and computational effort, creating Z-shaped paths to navigate otherwise impassable slopes. Its effectiveness may vary depending on terrain characteristics and overlook mechanical inefficiencies in the vehicle’s propulsion system [
21]. Additionally, Saad et al. developed a composite routing metric strategy, aiming to reduce friction and path length during planning, particularly effective on slopes. However, it may not adequately address dynamic terrain changes or the unique energy characteristics of tracked electric vehicles [
22]. Erke et al. proposed a path-planning algorithm utilizing a predefined reference road route, showcasing improvements in on-road motion planning. Nevertheless, its effectiveness diminishes in off-road scenarios with complex obstacles or uneven surfaces due to the oversimplification of terrain features, leading to suboptimal paths and inadequate energy optimization [
23].
Several studies have explored algorithm enhancements and computational considerations. Song and Gao enhanced the ant colony algorithm by adjusting pheromone distribution and volatility, offering a multilevel adaptive path-planning model. Despite its effectiveness in off-road environments, the algorithm may not prioritize energy efficiency, necessitating extensive parameter tuning, hindering real-time applicability [
24]. Min et al. integrated global navigation and local planning layers, proposing an enhanced A* algorithm for unstructured environments. However, this approach primarily emphasizes local planning and may not fully account for global energy optimization factors [
25].
Some studies have prioritized refining path planning to achieve smoother trajectories. Wang and colleagues improved the A* algorithm with a collision cost heuristic function, enhancing safety and path smoothness. However, the study lacked explicit consideration of energy optimization [
26]. Additionally, Zhang et al. combined a new heuristic function with the artificial potential field method, improving execution efficiency by minimizing turning points. However, the study’s lack of explicit discussion on energy optimization and off-road terrain conditions leaves certain aspects unaddressed [
27]. Chen et al. proposed an enhanced path planning method for mobile robots by integrating the A* algorithm with artificial potential fields and using a three-neighbor search strategy. This method improves efficiency by reducing path length, search time, the number of search nodes, and turn points. However, it may face limitations in complex or dynamic environments [
28]. Baras and Dasygenis introduced a spanning tree algorithm to minimize navigation turns and optimize area division. However, this approach may not fully account for terrain roughness and slope gradients impacting its ability to ensure energy-efficient routes [
29].
Lastly, researchers have investigated the utilization of prior information and predictive methods. Zhang et al. utilized Probabilistic Neural Networks (PNN) to extract the drivable area’s centerline from satellite maps, applying the A* strategy for path planning. However, this method heavily relies on prior information, which may be unreliable in dynamic off-road environments, potentially leading to suboptimal and energy-inefficient paths [
30]. The research has tackled challenges in path planning, covering obstacle avoidance, smooth trajectory generation, terrain adaptation, and computational efficiency. These efforts have led to the development of diverse methods, including local path-planning algorithms, collision avoidance integration, heuristic planners, and composite routing metrics. However, these approaches need further validation and optimization for energy efficiency and adaptability to dynamic environments.
In addition, various challenges such as dynamic objectives, static and dynamic surroundings, numerous robots, real-time modeling, kinematic evaluation, and hybrid methodologies are discussed in a distinct collection of papers found in the academic literature about mobile robots [
31,
32,
33]. A* is recognized as the preferred methodology for attaining a near-optimal solution, utilizing the information present at the nodes. Its suitability for static environments is underscored by its efficient use of memory, rapid computational capabilities, simplified implementation process, and overall effectiveness, rendering it a practical option for integration into embedded systems [
33,
34].
When analyzing the literature, one can observe that the publications encompass various aspects such as obstacle avoidance, minimizing operational losses, reducing vehicle steering, and path planning based on the vehicle’s capability limits. Additionally, the literature explores topics like adhering to predefined roads, creating roads using satellite images, road preference based on traffic and traffic lights information, and locating the nearest charging station via the shortest route. The research primarily focuses on the factors that influence vehicle energy consumption, with a particular emphasis on reducing energy usage.
However, it is crucial to acknowledge that the vehicle’s state variables, including instantaneous speed and torque, as well as the operational areas of its subsystems, significantly impact energy consumption. In addition, despite the limited road options on the highway, the road alternatives on off-road terrain are contingent upon the vehicle’s limitations and present numerous possibilities.
Therefore, the objective of this study is to address the existing gap in the literature by developing an energy-efficient path-planning approach that considers the vehicle’s energy consumption throughout its journey specifically tailored for tracked electric vehicles in off-road environments.
Various off-road terrains and their impact on energy consumption are analyzed to validate the effectiveness of the solution. Therefore, a tracked electric vehicle energy model considering vehicle dynamics is developed and validated with real vehicle driving data logs to develop a strategy that can practically enhance the energy efficiency of off-road tracked electric vehicles in real-world scenarios. Various off-road terrains and their impact on energy consumption were analyzed, aiming to identify strategies that adapt to different landscapes. A developing path-planning strategy is an Energy-Efficient Path-Planning (EEPP) algorithm tailored for off-road a tracked electric vehicle dynamic energy consumption model. In the validation of the effectiveness of the designed algorithm, different routes are tried to be produced by changing energy consumption model parameters. After that, energy consumptions on produced paths are compared using a validated energy consumption model of the tracked electric vehicle. This means that finding the energy-efficient path depends very much on the vehicle and vehicle dynamic energy consumption model created. Real-world and practical constraints in off-road applications are considered when developing and evaluating the algorithm.
In the sections that follow, an approach to planning paths that use less energy is introduced in
Section 2. Following this, the validation of the energy consumption model is detailed in
Section 3. Subsequently, the results obtained from the implementation of this method, demonstrating its potential for energy savings, are presented in
Section 4. The paper concludes in
Section 5, where the findings are reviewed, discussed, and recommendations for further research in the area are proposed.
3. Energy Consumption Model Validation
The validation of the proposed energy consumption model with real test vehicle data is crucial to understand the fidelity of this study. In this study, the Barkan-tracked electric vehicle developed by Havelsan was used. This vehicle on the test site can be seen in
Figure 5.
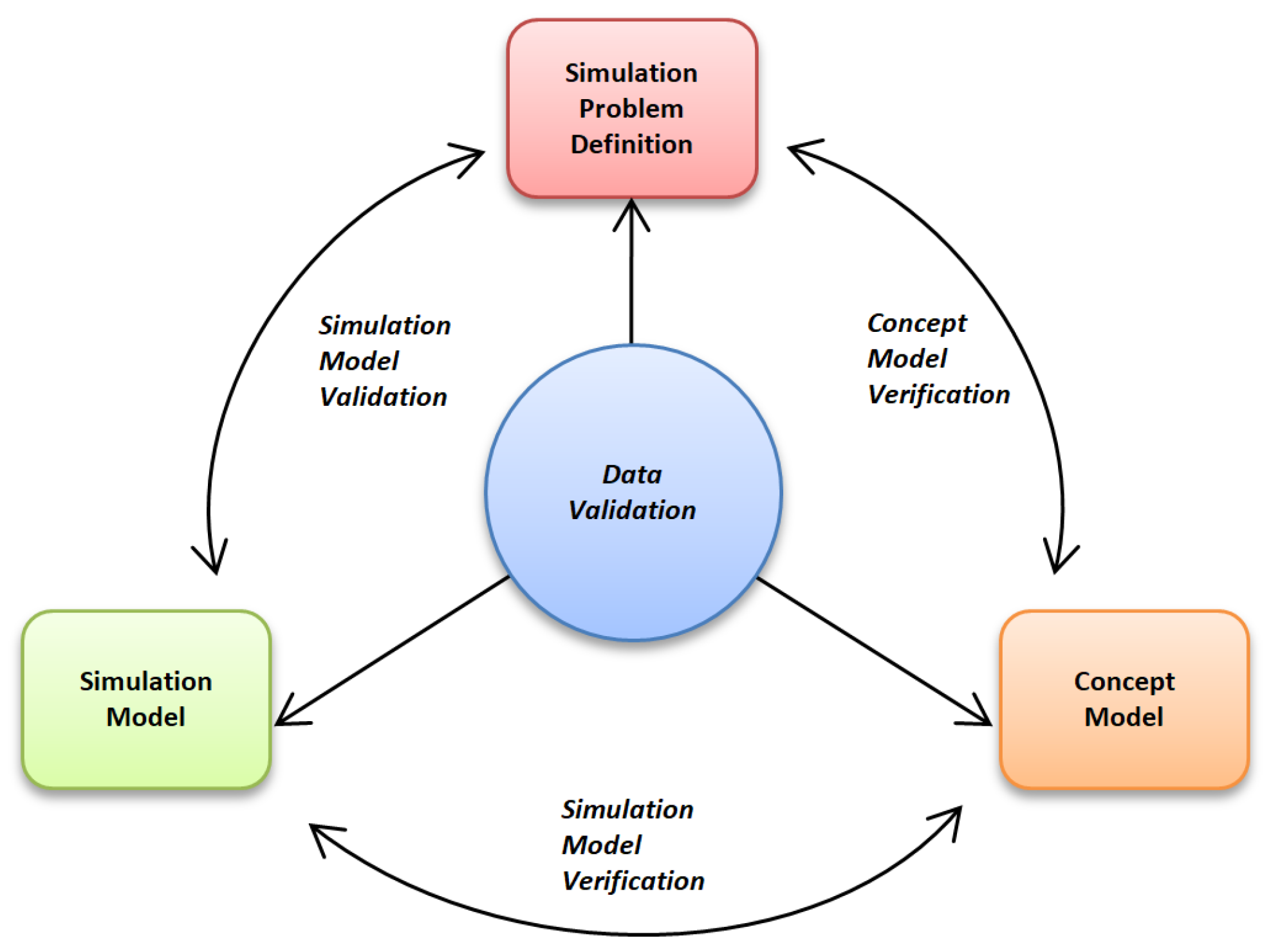
Three distinct phases of model verification and validation are illustrated in
Figure 6. The first phase, known as conceptual model verification, aims to ensure that the conceptual model accurately reflects the simulation problems identified in the real-world system. This step is crucial in establishing the foundation of the model and ensuring its accuracy. The second phase, simulation model verification, focuses on confirming that the computer-based simulation model possesses sufficient accuracy to represent the conceptual model. This step involves assessing the model’s ability to accurately simulate the real-world system and its dynamics. It is essential to ensure that the simulation model faithfully represents the conceptual model to obtain reliable results. The final phase, simulation model validation, involves a series of simulation experiments that aim to confirm the accuracy, effectiveness, and efficiency of the model in understanding real-world problems [
38].
In the context of the study, the self-validation and co-validation strategies, given in [
38], were employed to verify and validate the simulation model concerning the energy consumption and dynamic characteristics of the vehicle. The simulation model serves the purpose of forecasting the performance of a system, enabling a comparison between the actual system performance and the predicted performance from the model. This comparison aims to ascertain whether the two are identical or sufficiently similar. By applying these strategies, it can be ensured that the simulation model accurately represents the energy consumption and dynamic characteristics of the vehicle.
where
,
, and
are north, east, and down speeds of the local NED frame, respectively;
,
and
are roll, pitch, and yaw angles, respectively;
is the body angular velocity;
and
are angular rates about
y-axis and
z-axis, respectively;
,
, and
are total, right, and left motor torques;
and
are angular velocity of motors;
and
are produced mechanical shaft power of the motors and electrical required power for motors;
and
are the battery currents for right and left drives; and
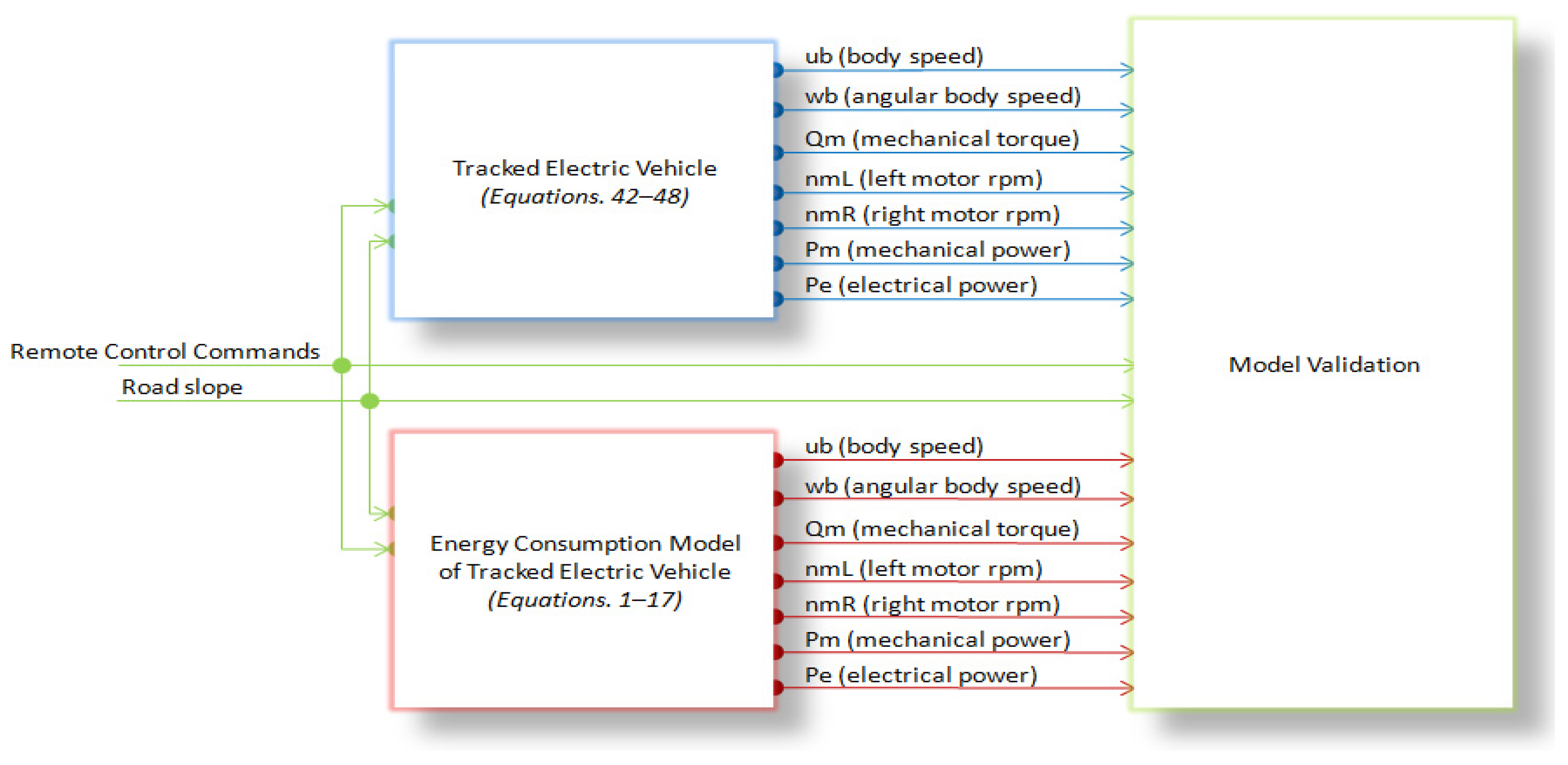
is the battery voltage. The characteristic of the validation methodology for the energy consumption model is shown in
Figure 7.
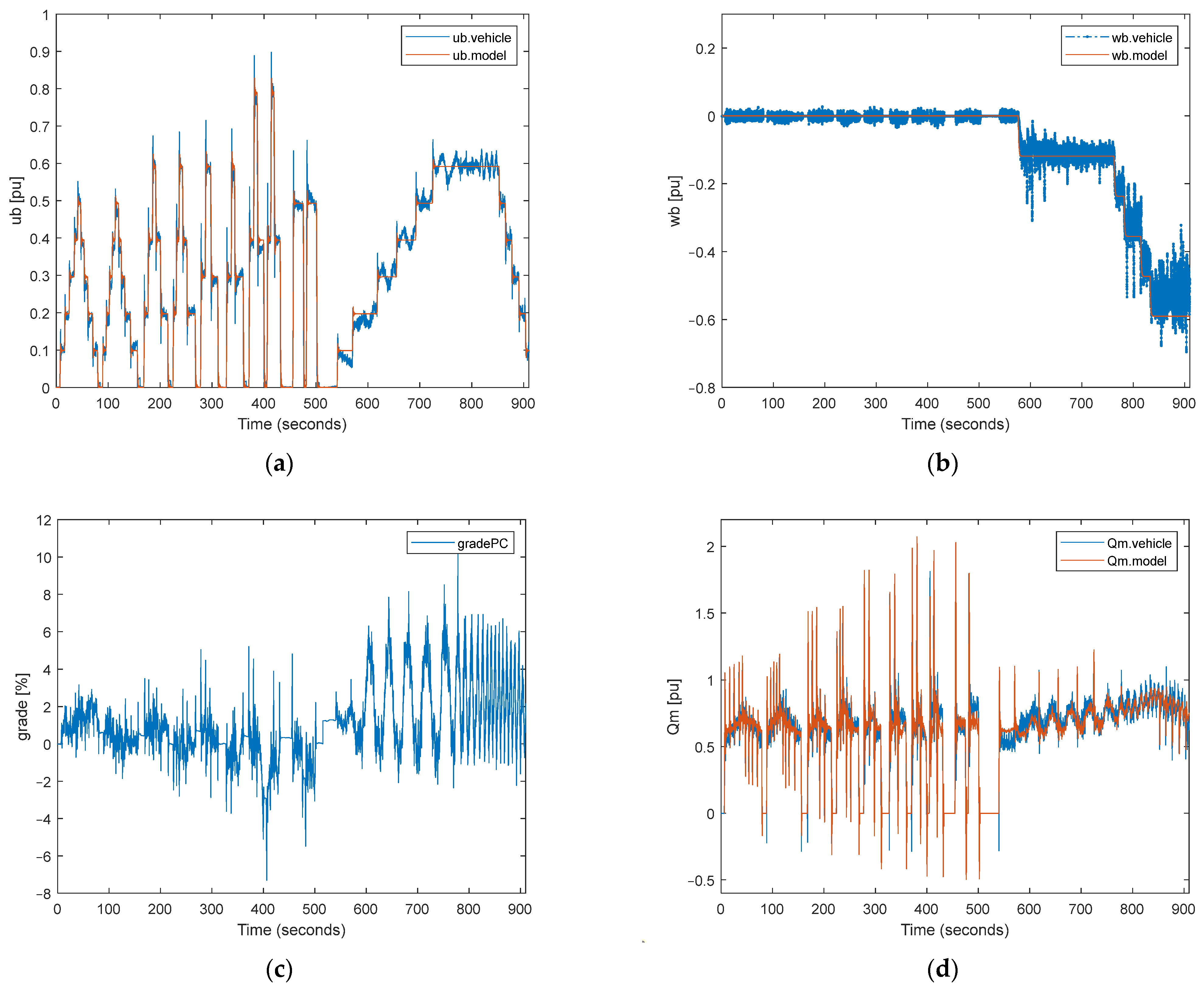
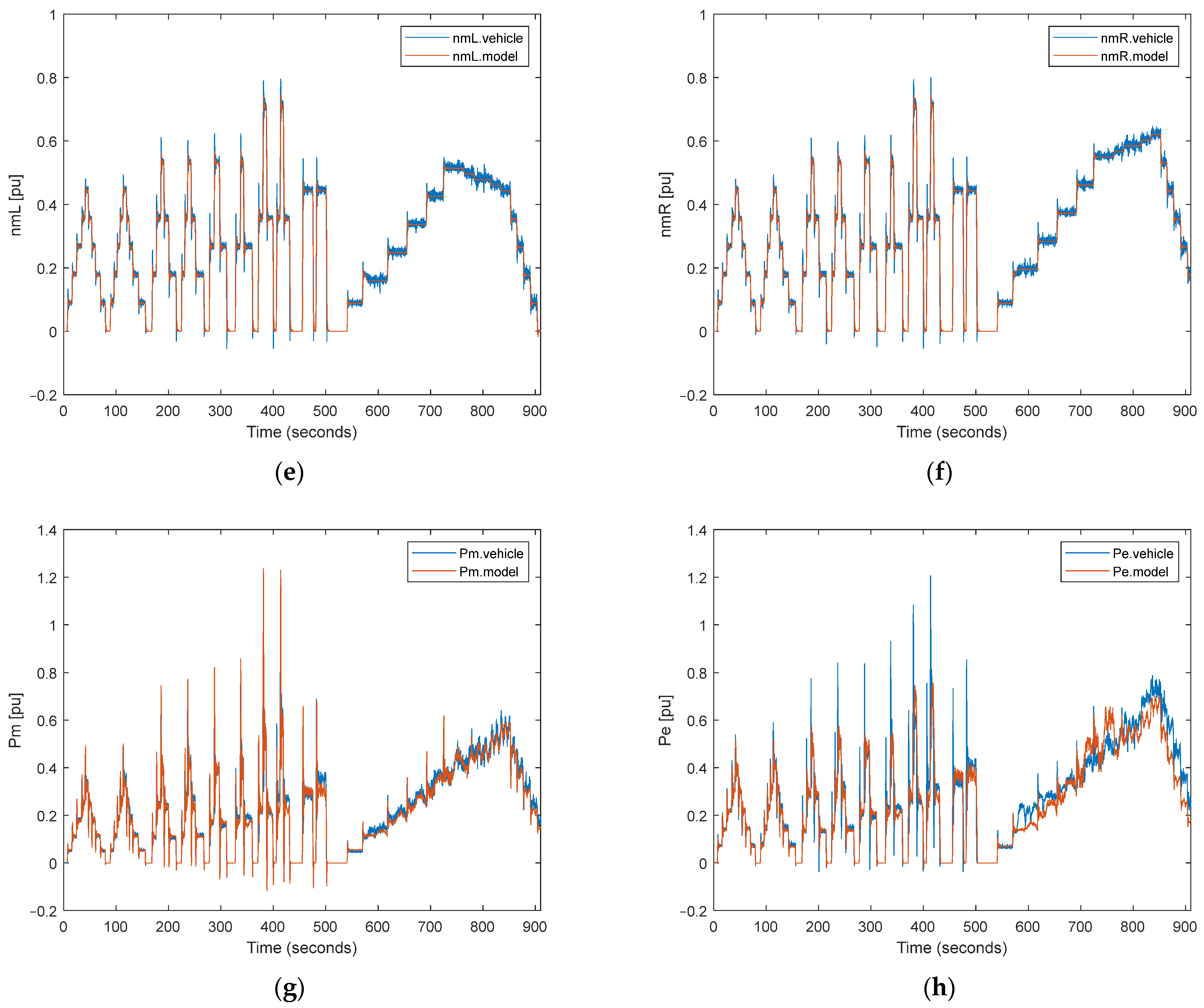
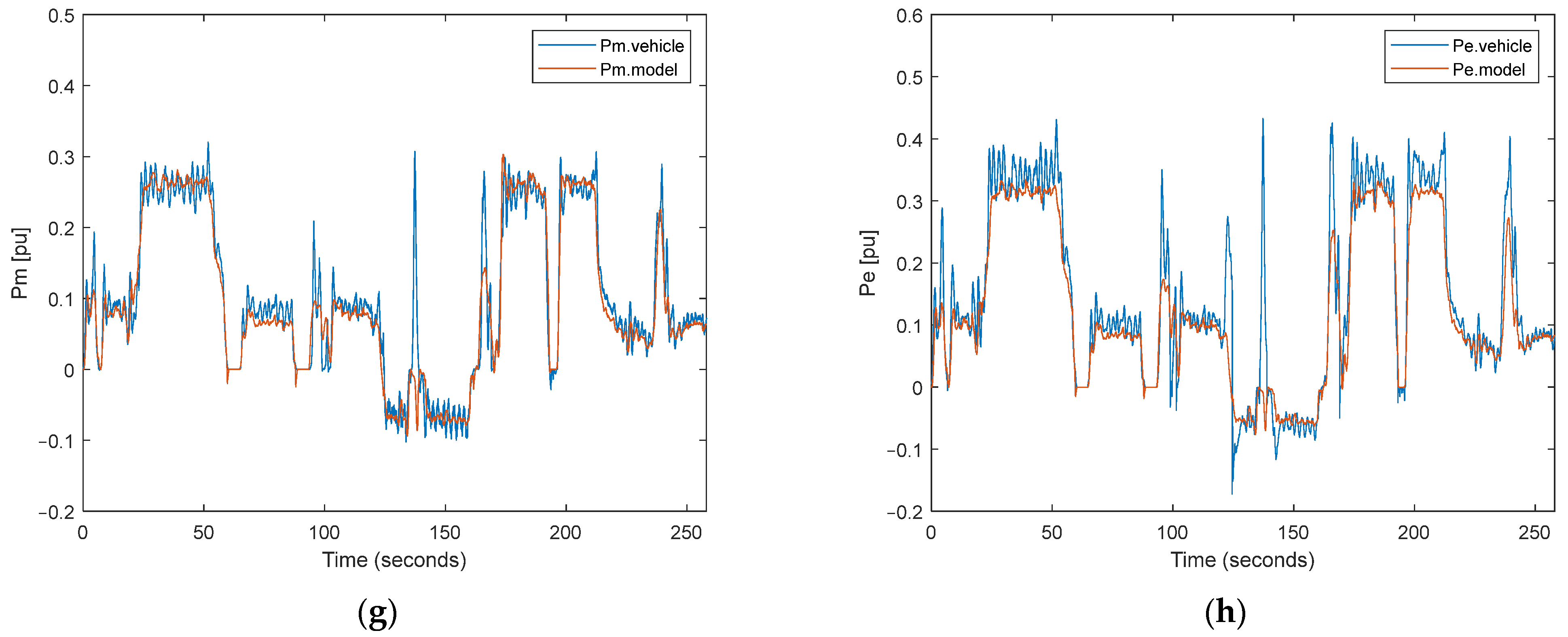
In the validation process of the system, two different driving tests were performed. The first test includes longitudinal and steering maneuvering, shown in
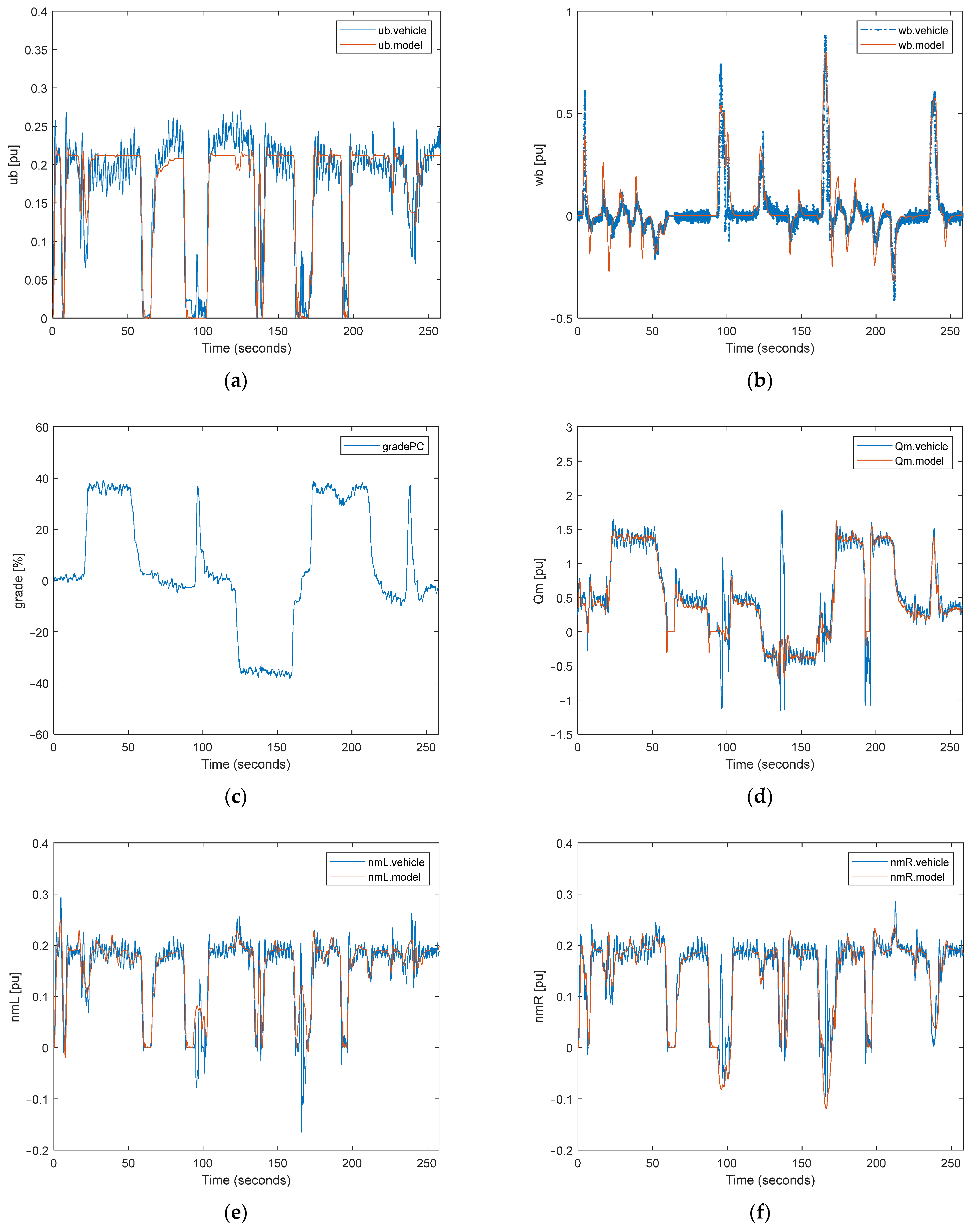
Figure 8, and the second test outputs show maneuvering in the high-grade terrain, shown in
Figure 9.
It is considered that the speed and angular speed of the vehicle calculated using commands applied to the system and the grade of the terrain are base inputs in
Figure 8 and
Figure 9a–c for our calculation method, as can be seen in
Section 2. After that, this base input is used to calculate the torque, speed, and power of the motor shaft in
Figure 8 and
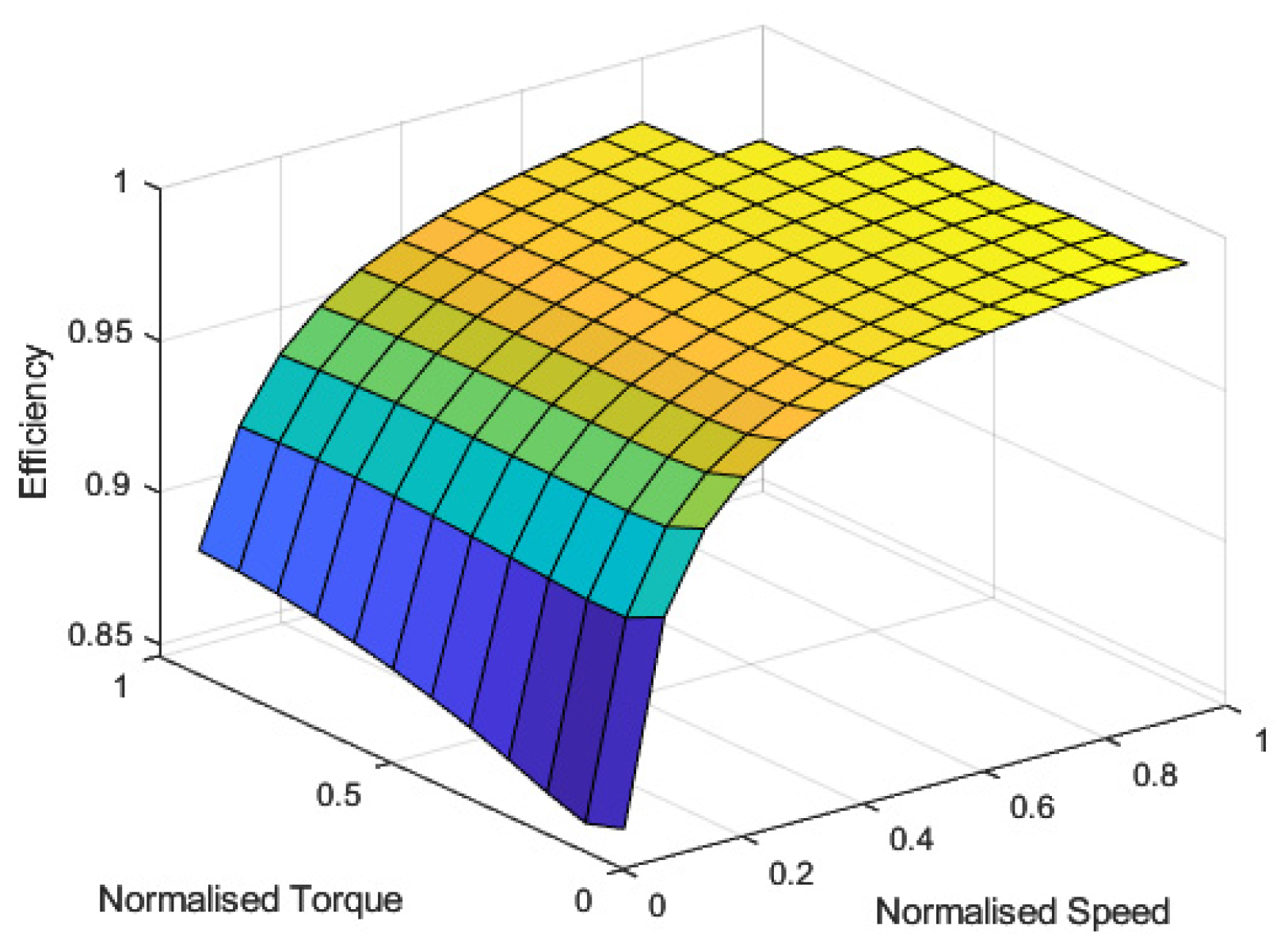
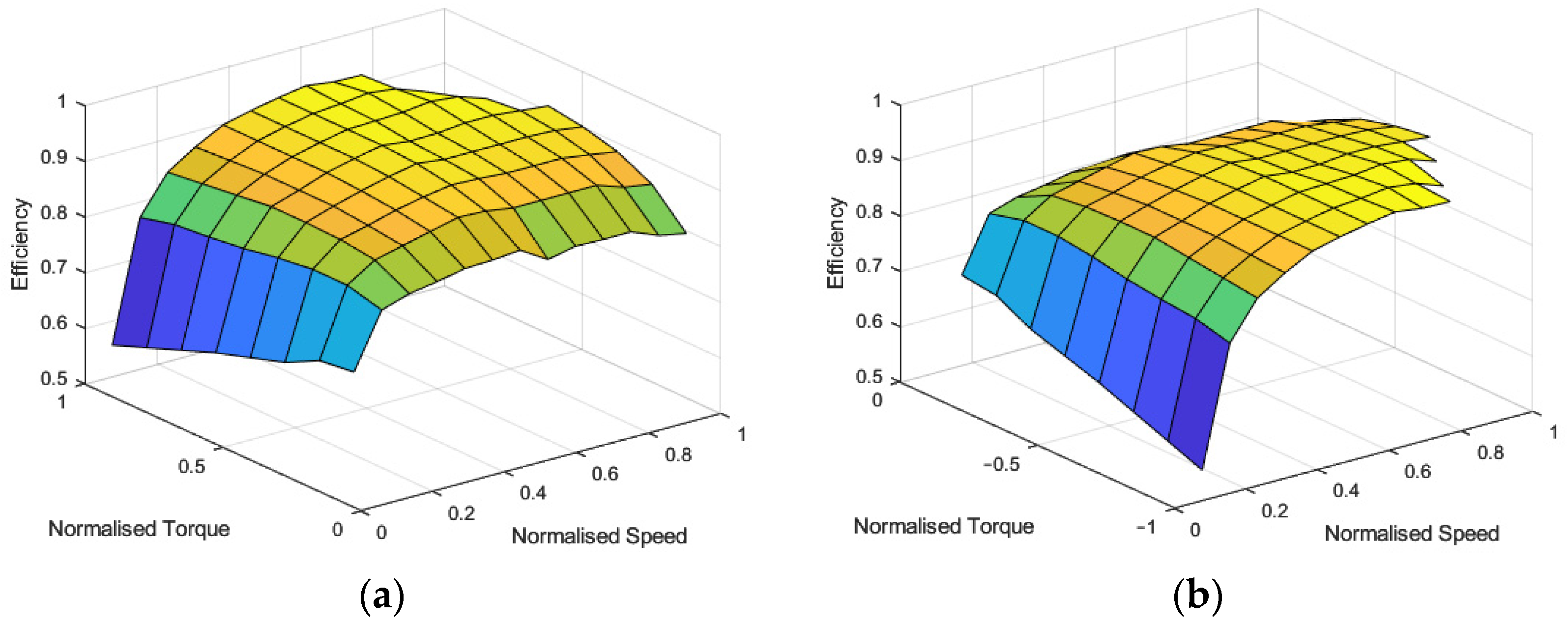
Figure 9d–g. Finally, the necessary electrical power obtained from the battery is calculated using efficiency maps drawn in
Figure 8 and
Figure 9h. In this study, figures are drawn per unit because of the confidential issues for military applications and the defense industry.
In general, a very good overlap was achieved in speed, torque, and power values. In regions where the overlap is slightly separated, it is thought that there is the effect of noncontinuous momentary disturbances originating from the system and the environment. As seen from the model and real test data, the performance of the overlap is achieved not only in steady-state behavior but also in transient-state behavior. The performance of the overlap is evaluated using the root mean square of the error (RMSE) shown in
Table 1. All parameters are evaluated on a per-unit basis.
In this study, the grade performance of the energy consumption model is investigated in off-road terrain. Therefore, in the second test, it was attempted to obtain the effect of the slope on speed, torque, power, and energy by using the tracked electric vehicle manually on a highly inclined road. Considering that we do not take into account the noise on the real system and other subsystem disturbances when the driving outputs on highly inclined roads and the model outputs are examined together, it has been determined that very similar results can be obtained with this model on inclined roads.
4. Energy-Efficient Path-Planning Simulation Results and Comparative Analysis
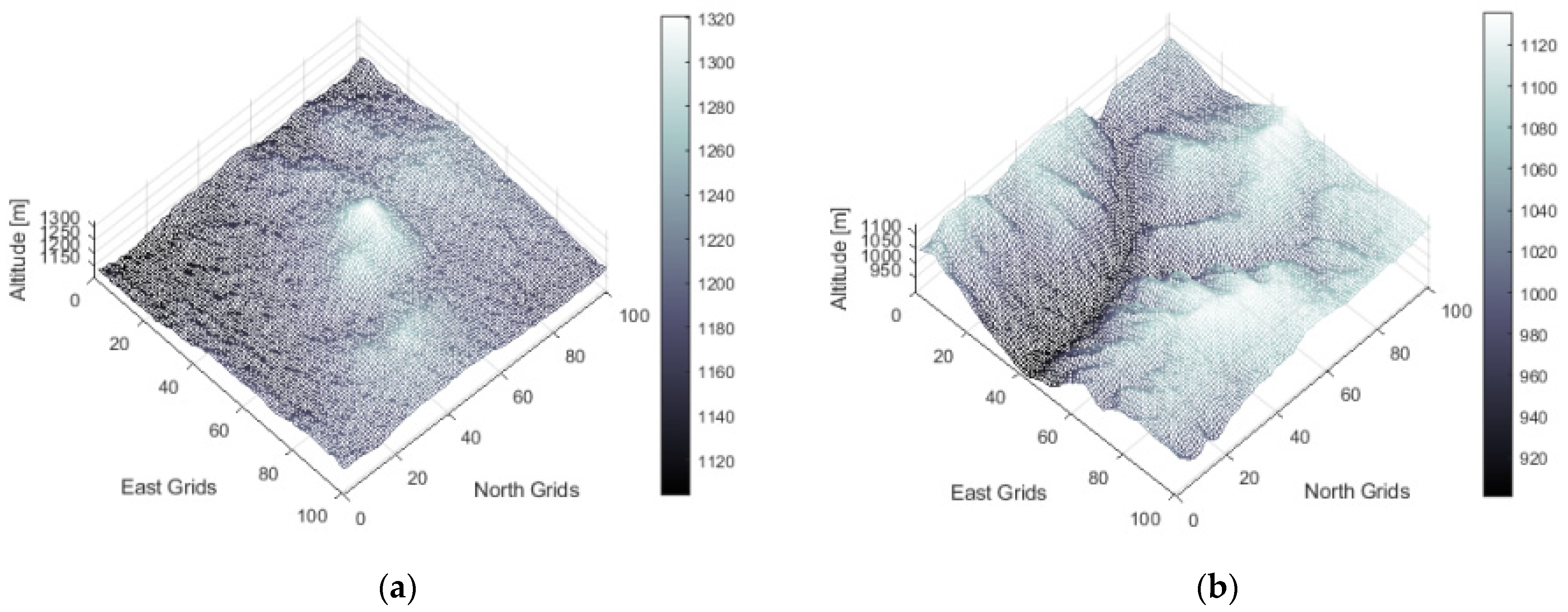
In this study, various off-road terrains and their impact on energy consumption are analyzed to validate the effectiveness of the solution using a validated energy consumption model of the tracked electric vehicle. Two different parts of Central Anatolia, approximately between N39E033 and N40E034 latitudes and longitudes, were used as terrain samples, seen in
Figure 10, to analyze the effect of the terrain-validating algorithm performance. This land was carefully selected for its expansive steppe terrain, which boasts an abundance of route options. The decision to choose this area was primarily influenced by the near absence of obstacles, particularly vegetation, allowing for virtually limitless possibilities when planning routes and traversing the landscape.
A path plan strategy was proposed tailored for an off-road tracked electric vehicle dynamic energy consumption model. To evaluate the success of the proposed algorithm, different routes are forced to be produced by changing the energy consumption model operation speed.
After that, energy consumptions on produced paths are compared using a validated energy consumption model of the tracked electric vehicle. This means that finding the energy-efficient path depends very much on the vehicle and vehicle dynamic energy consumption model created.
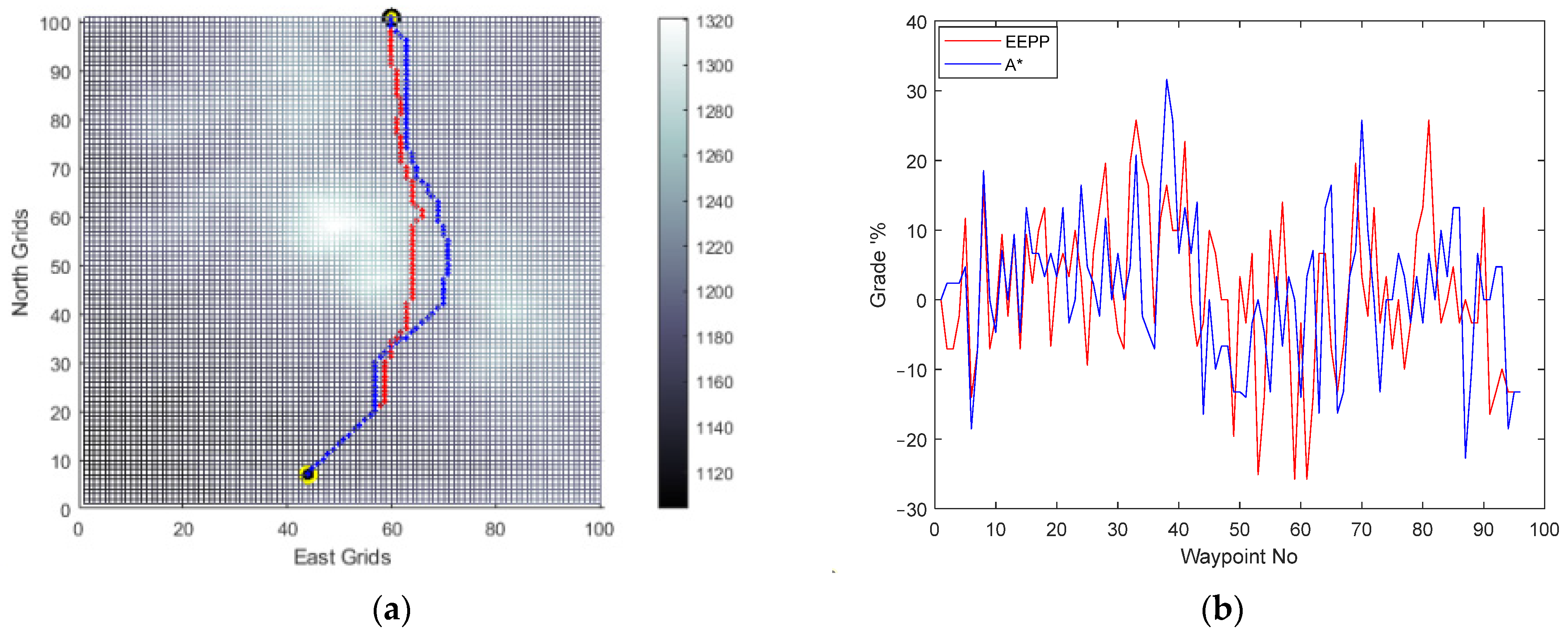
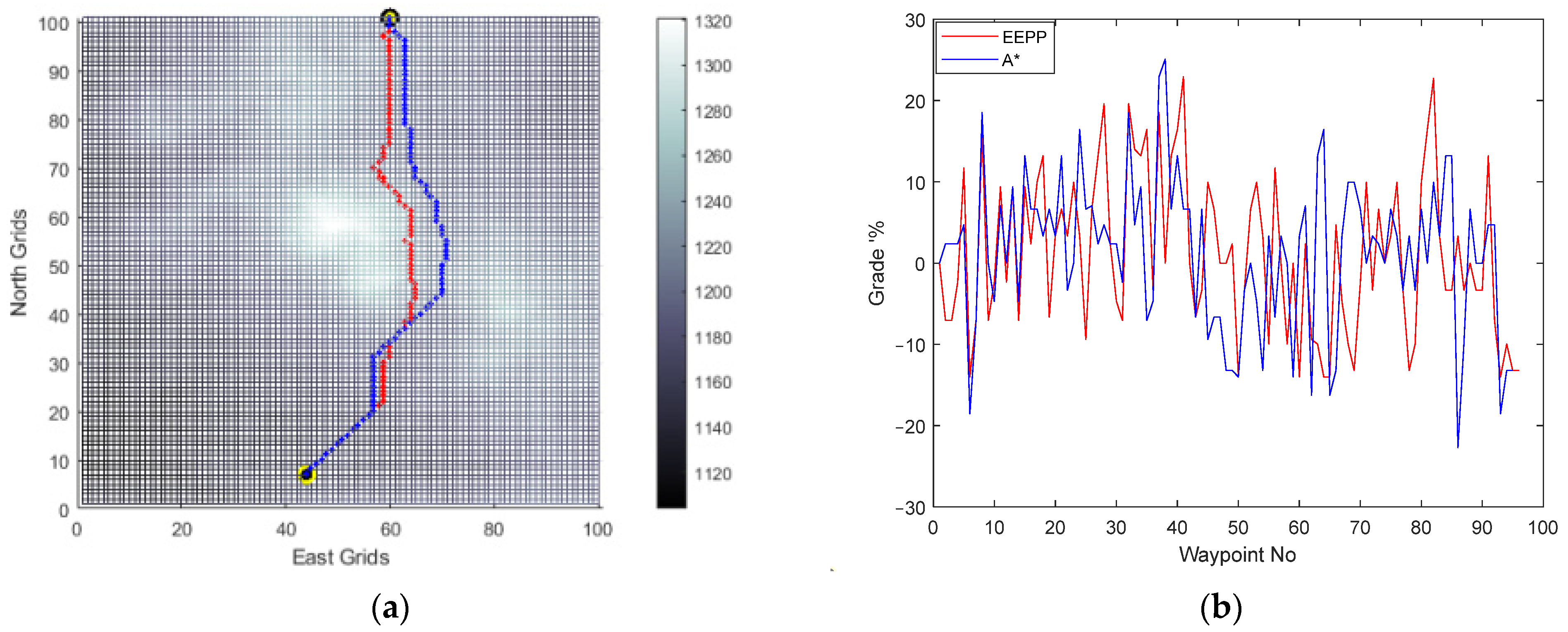
In terrain A and terrain B, reference paths are generated using the classical A* algorithm that tries to find the closest path and does not care about energy consumption. To ensure its applicability and comparability in real-world scenarios, the classical A* algorithm has been subjected to vehicle constraints. Energy-efficient paths are planned with the EEPP algorithm using a validated energy consumption model.
Firstly, to compare the effect of the body speed of the vehicle, the EEPP approach is also tried for different speeds of the vehicle on terrain A and presented in
Figure 11,
Figure 12,
Figure 13 and
Figure 14.
It was observed that adjusting the operational speed led to changes in the shapes of the paths generated within the system’s constraints. The incline conditions of the terrain were identified as a crucial factor influencing this alteration, mainly due to the vehicle’s ability to climb slopes. Furthermore, the simulation results confirmed the selection of the option with the lowest energy consumption among the available choices for reaching the same destination.
Horizontal positions of the waypoints and grade percent values of the routes are compared for paths generated by A* and EEPP for different vehicle speeds.
During the comparison process, focus is placed on the velocity of the vehicle, the duration of duty, the distance of the path generated, the energy utilized, and the steepest incline of the road traversed, which are then consolidated in the
Table 2.
The utilization of the proposed algorithm enables the identification of a secure and cost-effective path in scenarios where the platform encounters difficulties in adhering to task constraints. It has been ascertained that relying solely on the analysis of terrain slopes and elevation maps fails to yield routes that are both energy-efficient and compatible with platform operation constraints. The efficacy of determining routes based on land slopes in terms of energy efficiency is inadequate. The tabulated data demonstrate that the designed path-planning method achieves energy savings of up to 6.93%. Consequently, this approach facilitates a 7.45% increase in the vehicle’s operational range. In addition, for Terrain A, no route was found that met vehicle constraints at speeds greater than 50% of the nominal vehicle speed.
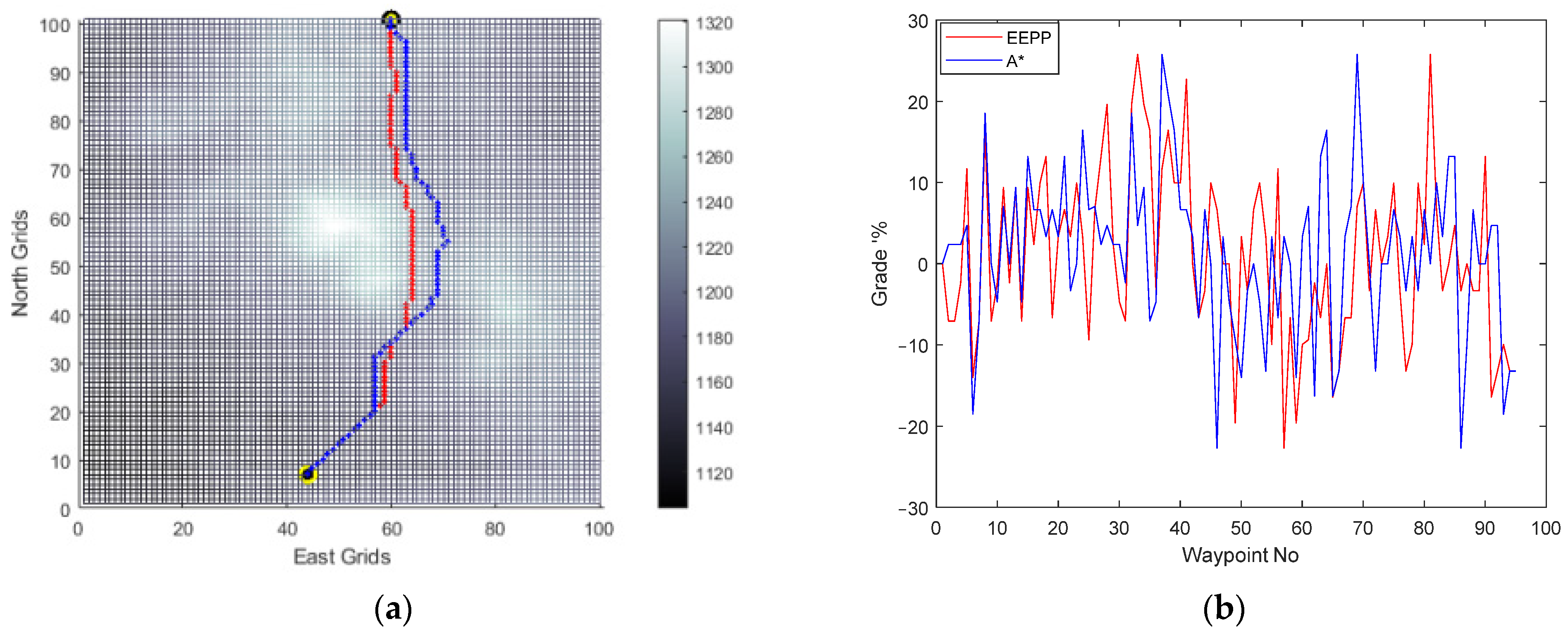
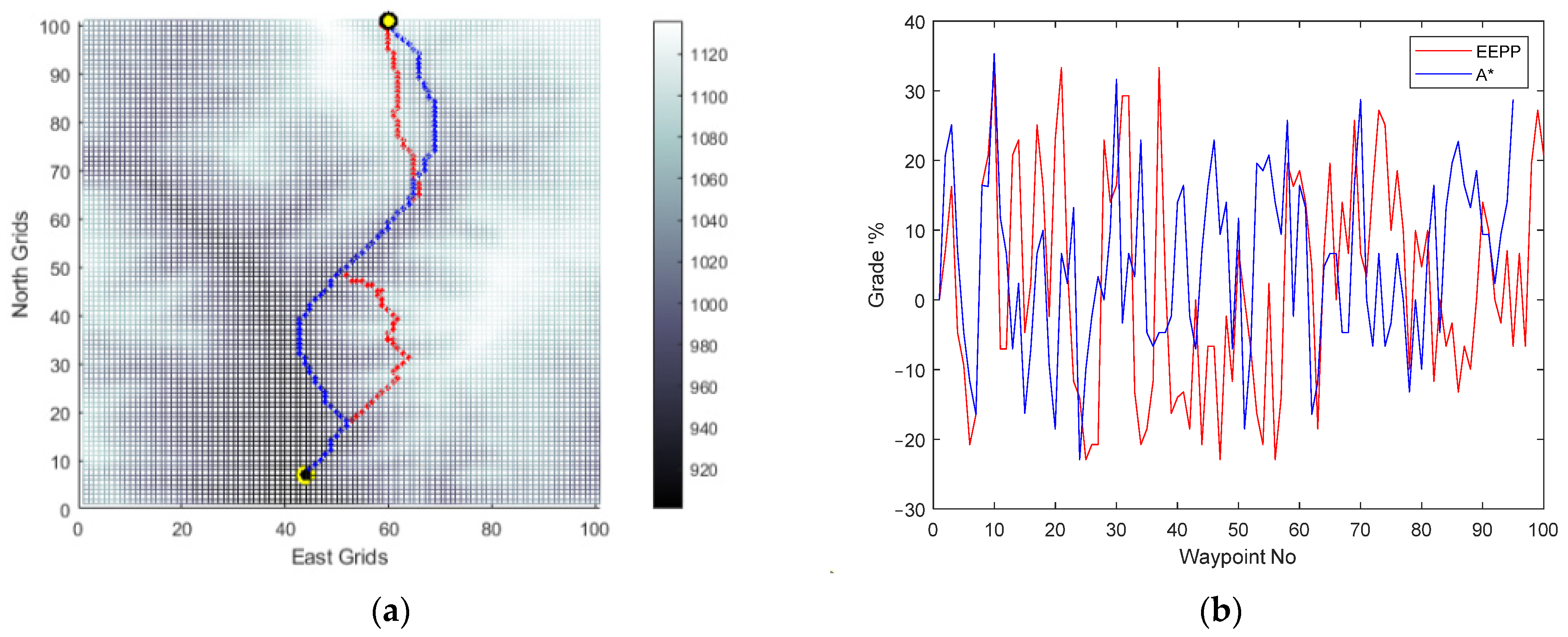
Secondly, to compare the effect of the body speed of the vehicle, the Energy-Efficient Path-Planning (EEPP) approach is also tried for different speeds of the vehicle on terrain B and presented in
Figure 15,
Figure 16 and
Figure 17.
The modification of the operational speed was observed to have an impact on the shapes of the paths generated within the system’s limitations. The incline conditions of the terrain were identified as a significant factor in influencing this alteration, primarily due to the vehicle’s capability to ascend slopes. Moreover, the simulation results validated the selection of the option with the lowest energy consumption among the available alternatives for reaching the same destination.
A comparison between the horizontal positions of the waypoints and the grade percent values of the routes was performed for paths generated by A* and EEPP at different vehicle speeds.
Throughout the process of comparison, attention is directed towards the speed of the vehicle, the length of time spent on duty, the distance covered, the energy consumption, and the maximum gradient of the road traveled, all of which are subsequently compiled in the
Table 3.
The implementation of the suggested algorithm allows for the discovery of a secure and cost-efficient route in situations where the system faces challenges in meeting task requirements. It has been observed that relying solely on the examination of terrain slopes and elevation maps does not result in routes that are both energy-saving and in line with platform operation limitations. The effectiveness of selecting routes based on land slopes for energy efficiency purposes has been deemed insufficient. The data presented in the tables indicate that the proposed path-planning technique leads to energy conservation of up to 4.66%. As a result, this method enables a 4.88% enhancement in the vehicle’s operational capacity. Moreover, for terrain B, no viable route was identified that adhered to vehicle restrictions at speeds exceeding 30% of the nominal vehicle speed.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}