
Safety and Risk Analysis of Autonomous Vehicles Using Computer Vision and Neural Networks



Abstract
:1. Introduction
- The interaction between the ADS and the operational design domain (ODD) is studied for various states, and it is analysed with regard to how a safe state ODD can be maintained.
- Various concepts and factors involved in the design of safety and risk assessment systems are explained, such as required human–machine interactions (HMIs), vehicle-to-everything V2X communication, and other factors required for AVs’ ground reality.
- Technical machine learning approaches are discussed, such as the partially observable Markov decision process (POMPD) model, the model predictive control (MPC) model, and other neural network methods such as spatial convolutional neural networks (SCNN) and convolutional neural networks (CNNs).
- A detailed study about cooperative collision avoidance (CCA) for connected vehicles is introduced.
- Case studies on the lane detection of straight lanes and modifying the straight lane detection algorithm for the detection of curved lanes are conducted.
- The neighbouring vehicle’s trajectory is predicted using robust control frameworks, thereby achieving higher predictability in an ego vehicle.
2. Concepts and Factors Involved in the Design of Safety and Risk Assessment in AVs
2.1. Operational Design Domains and OREMs
- Safe state: The dynamic run-time assessment system produces executable contracts, and the ADS is able to successfully address an assigned problem and produces a minimum risk manoeuvre. In this state, the ODD is completely known, and the system has full capability to make decisions.
- Warning state: In this state, the dynamic run-time system assesses the situation and produces a partially executable contract or a command which may or may not be fulfilled by the ADS, hence transferring control back to the driver. Here, the ODD is partially known and tries to produce a low-risk outcome manoeuvre.
- Hazardous or Catastrophic state: In this state, the run-time system produces virtually unjustifiable commands, where the ADS produces an error output and control is completely transferred to the driver.
2.2. Human–Machine Interaction
2.3. Vehicle-to-Everything Communication (V2X)
2.4. Factors for AV Ground Reality
- Materials: This includes both active and passive components of a street’s infrastructure which are in constant interaction with each other and with vehicles. These primarily include toll gates, road dividers, pavements, traffic separators, curbs, etc.
- Regulations: These are formal rules put into place by a governing authority, which affects how the space is used and how people interact with the surroundings and among themselves. More importantly, as this constitutes the ethics to be followed while driving, this needs to be accounted for when designing an autonomous vehicle.
- People: Probably the most important factor, people are the living embodiment of these established ethics. This is the most diverse and dynamic factor, as people engage in various tasks, such as listening, talking on phones, texting while walking, conversing with others, etc. The human–street–machine interaction is also greatly affected by the age and cultural backgrounds of streets, which must be taken into perspective.
- Patterns of normative negotiations: This constitutes the common understandings and guidelines for using a street in terms of information regarding interactions between structures in place and the people involved. The way a rule or a law is understood depends on the specific configuration of people, materials, and regulations that come together in a specific situation.
- Perception: This can be achieved by an AV through the use of high-resolution cameras and high-speed LIDARs which capture the AV’s surroundings with high resolution and contrast.
- Prediction: The principle of a prediction mechanism of an AV consists of its level of confidence in its decision-making algorithms and the way it uses the statistical models of accidents. Solutions to these technical challenges are emerging rapidly with faster sensors and more data to train neural networks to achieve the required and desired accuracy.
- Driving policy: This is mainly formed by the data collected by the AV from the perception stage and how this data is interpreted by the AV in the prediction stage. These data mainly make up the rules and policies followed by the AV on the road. This can also be called the “ethics” maintained and followed by the AV.
3. Technical Approaches for Safety and Risk Assessment of AVs
3.1. Machine-Learning-Based Approaches
- Partially observable Markov decision process (POMPD): The POMDP model is a decision-making method that performs a series of related tasks and problems to maximise its optimum results in a given time frame [8]. The main advantage of using the POMDP model is that it takes into account the factor of uncertainty in readings by ’Partial Observability’ which means that the agent cannot directly observe the state, but it relies on a probability distribution over a set of all possible states. This distribution is then updated on the basis of the set of observations, their respective transitions, and their probabilities. It can be defined by the tuple given below [29]:
- Model predictive control (MPC): This is a method of process control which satisfies a predetermined set of constraints. An MPC model for an autonomous vehicle is designed in order to maintain the vehicle along its planned path while also fulfilling the physical and dimensional constraints of the vehicle [31]. MPCs are easily implementable at various levels of the process control structure, which includes multiple input and output dynamics, while maintaining the stability of the AV. MPCs are more efficient and pronounced in the steering control of the AV. In comparison to linear controllers, these provide increased stability for the control system boundary. The MPC also creates a benchmark to which other sub-optimal and linear controllers can be compared. Due to these advantages, MPC models are used in many sub-systems of automobiles such as in active steering, proactive suspensions, proactive braking systems, and traction control systems, which coordinate together to improve the vehicle’s handling and stability [32]. The MPC approach in AVs also enables the vehicle to generate its own motion in a given time horizon using its optimization framework, while considering various constraints such as speed limit, trajectories, and states of neighbouring vehicles, as well as the mechanical constraints of AVs, such as maximum acceleration, braking torque availability, etc. [6].
- Use of neural networks (NNs): This is probably the most efficient method in predicting the range of accidents and their intensity and impact. The efficiency of this system is based on the amount of data which is fed. It also depends on the “cleanliness” of the data fed and the labelling of the data points accurately. This is usually done by dividing the data into LIDAR datasets and camera datasets, which are independently generated. Three-dimensional LIDAR data labelling is mainly done by providing 3D box labels which include vehicles, pedestrians, cyclists, and street signs. Each scenario can include areas which are not labelled, known as the no label zone (NLZ), represented as polygons in captured frames [33]. To differentiate between NLZs and box labels, a Boolean data type is explicated to each LIDAR point to indicate whether it is an NLZ or not. Two-dimensional camera labelling is done by providing 2D bounding box labels in the captured camera image [34]. These labels are highly defined, have a specific fit, and have global unique tracking IDs. Usually vehicles, pedestrians, and cyclists are the objects which have 2D labels. Then these labelled data are divided into training and test datasets. The training set is used to train the model, and the test set is used to measure the accuracy of the trained model [35]. It is noted that the test set should be large enough to yield statistically meaningful results, it should contain all the characteristics of the complete dataset, and the training dataset should not exclude any characteristics from the test dataset; in other words, the test dataset should be the subset of the training dataset. It should also be noted that the model should not over fit the training data. This process is repeated till the level of accuracy is achieved. In an autonomous vehicle’s system makes use of this highly trained deep learning technique [36] using CNNs and SCNNs for detecting object and spatial features. These features are then analysed by the on board ADS and ADAS system to render a proper output. Here, SCNNs are better suited as they can also detect the “spatial features” of surrounding objects, which CNNs cannot. In the case of detecting lanes, for those which are occluded by obstacles such as vehicles, poles, road dividers, pavements, etc., the SCNN “extrapolates” these lane markings, as opposed to CNNs which are incapable of detecting spatial features and hence show a discontinuity while detecting lanes occluded by obstacles [37]. SCNNs generalize traditional deep layer-by-layer detected convolutions to slice-by-slice convolutions, thereby establishing message passing between the pixels across the rows and columns of the layer. SCNNs are effective in detecting continuously shaped structures and large objects with strong “spatial” relations: for example, traffic poles, lanes, curved lanes, pillars, walls (road dividers), etc. [37].
3.2. Cooperative Collision Avoidance Based Approach
- The neighbouring vehicles are moving at a steady and uniform pace.
- An incoming rear vehicle with respect to an ego vehicle from an adjacent lane.
- There is an incoming vehicle, from an opposite direction, with respect to an ego vehicle from the adjacent lane.
Established Methodologies and Test Cases in V2X Communication
- Path following: Calculating the margin of error and generating a virtual map of the path are the main functions of the path following system [5]. Using recorded GPS waypoints and previously recorded human driving or data obtained from a web map, the path or the virtual map is generated. Then, there is a division of the routes into particular individual segments which are smaller segments of the road, and each segment contains an equal number of data points. Here, this paper makes use of a third degree polynomial equation:The path or the virtual maps which are mainly contained in the a,b,c, and d coefficients in the equation are all generated offline. Next, for the error calculation, these generated coefficients are used. The errors in lateral deviation and the yaw angle can be analysed and measured by referring to the vehicle path’s curvature, vehicle position, and selected preview distance.
- Collision avoidance with elastic band system [5]: This method is the successor of the path following system. In the case when an object or another vehicle appears on or near the ego vehicle’s path, the collision avoidance mode is activated, and the path points near the vehicle are altered by forces present in the direction of the obstacle. While the vehicle continues along the path following a modified path, data points are generated online [41]. To manoeuvre around the vehicle, instead of a predefined path, the ego vehicle makes use of the generated path consisting of these modified points. The elastic band method is more often applied to a path following task in which there already exists a predefined path which lies between the lanes, with the collision avoidance system mostly being limited to emergency or sudden lane changes [5]. This predefined path is modelled by dividing the path into nodes consecutively joined by these “elastic strings” which hold the curved path together using an internal force Fint.An external force, Fei, acts when the ego vehicle crosses the intended path. These forces “bend” the path of the ego vehicle similar to an elastic band, where the curvature of the path taken by the ego vehicle is dependent upon the magnitude of these forces. Here, Fint, the internal force acting, can be mathematically be given asSimilarly, the external forces acting on the vehicle, Fei, can be mathematically be given asTherefore, by using these equations, the required displacement for each node due to Fint and Fei can be calculated, and by repeating the iteration for each node, the overall path of the ego vehicle can be generated.
- Decision making and lane changing [5]: While the AV is preventing a collision with other vehicles in the same lane or its current path, it should also consider the incoming vehicles and objects in the neighbouring lane to prevent a collision. The incoming vehicle in the neighbouring lane could be approaching the ego vehicle in the same or in the opposite direction to its travel [42]. The system makes use of the algorithmHowever, in accordance with the equation, the adjacent lane vehicles are still at risk of collision. After this calculation is iterated step wise, and, if in the longitudinal direction, the ego vehicle is in the danger zone, the direction of travel need not be altered. Instead of changing the lane, it slows down optimally until the danger zone passes [43] (this is further discussed in case study 3). Once the neighbouring vehicle exits the danger zone, the collusion avoidance mode navigates the preceding vehicle; this, in a way, is akin to the double lane changing manoeuvre.
4. Case Studies on Lane Detection and Simulating Environments
4.1. Case Study 1: Detection of Straight Lanes
- Capturing and decoding video file: This captures the video object and decodes the video frame by frame (i.e., converts video into a sequence of images). The following python code is used to capture the video and convert it into frames:cap = cv . VideoCapture (‘‘video Input .mp4’’)
- Greyscale conversion of image: This function mainly converts the RGB format frame to the greyscale format. This is done mainly because the greyscale format has fewer intensity peaks, which can be easily processed when compared to the RGB format. The following Python code converts the RGB frame to the greyscale frame:gray = cv . cvtColor(frame , cv .COLOR_RGB2GRAY)
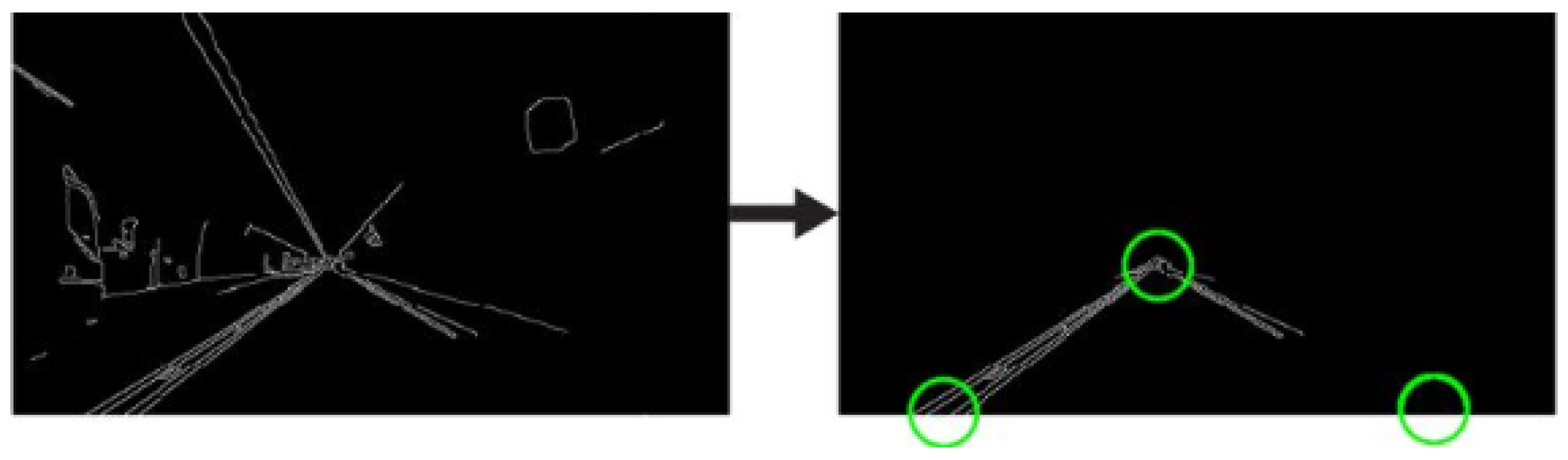
- Canny edge detector: This is a multi-stage algorithm which is employed in fast dynamic edge detection. This algorithm detects high changes in luminosity in the captured image, detects shifting of the white to black channel, and labels them as an edge in the given set of limits [44]. This process is done in a sequence of steps which include noise reduction, checking intensity gradients, non maximum suppression, and hysteresis thresholding, which are explained below.
- (a)
- Noise reduction: Noise is an integral part of the majority of edge detection algorithms. Noise is one of the main hurdles in the detection process. In order to reduce noise disturbance during the detection process, a 5 × 5 Gauss filter is used to convolve the image and reduce the noise sensitivity of the detector. This is achieved by using a 5 × 5 matrix of the normal distribution numbering to include the complete image and assigning a pixel value as a weighted average of the neighbouring vehicle’s pixel value. This process is repeated till all the pixels are assigned a weighted value. In the matrix, A and B denote neighbouring vehicles pixel value:
- (b)
- Evaluating gradient intensity: The intensity and direction of the edge are calculated by using edge detecting operators, which is done by applying Sobel filters that show the intensity present in both the X and Y directions. This generates a gradient intensity matrix [45].
- (c)
- Non-maximum suppression: Ideally, the image obtained should have thin and highly defined edges.This is applied to effectively define the edges and increase the contrast of the image such that the image is fit for the hysteresis threshold. This is done by analysing all the points in the gradient intensity matrix obtained and evaluating the maximum value of the pixels present at the edges of the image [46].
- (d)
- Hysteresis thresholding: After non-maximum suppression, the highly weighted pixels are confirmed to be in the final map of the edges. However, weak pixels are further analysed in terms of whether they contribute to noise or the image. Applying two pre-defined threshold values, any pixels with an intensity gradient which is higher than the maximum value are edges, and those with lower than minimum values are not edges, not well defined, and hence discarded.Python code for canny edge detector:def do_canny ( frame ) :gray = cv . cvtColor ( frame ,cv .COLOR_RGB2GRAY)blur = cv . GaussianBlur ( gray,( 5 , 5 ) , 0 )canny = cv . Canny ( blur , 50 , 150)return canny
The output of the canny edge detection function is shown in Figure 2. - Region of interest (segmentation): This step takes into account only the region covered by the road lane and the image is divided into segments for processing [47]. A mask is created in this ROI. Furthermore, a bit-wise AND operation is performed between each pixel of the canny image and this mask [48]. This function masks the canny edge and shows only the required polygon ROI.Python code for defining ROI:def do_segment ( frame ) :height = frame . shape [ 0 ]polygons = np . array ( [ [ ( 0 , height ) ,( 800 , height ) , ( 380 , 290 ) ] ] )mask = np . zeros_like ( frame )cv . fillPoly (mask , polygons , 255)segment = cv . bitwise_and ( frame , mask )return segmentThe output of the ROI function is shown in Figure 2.
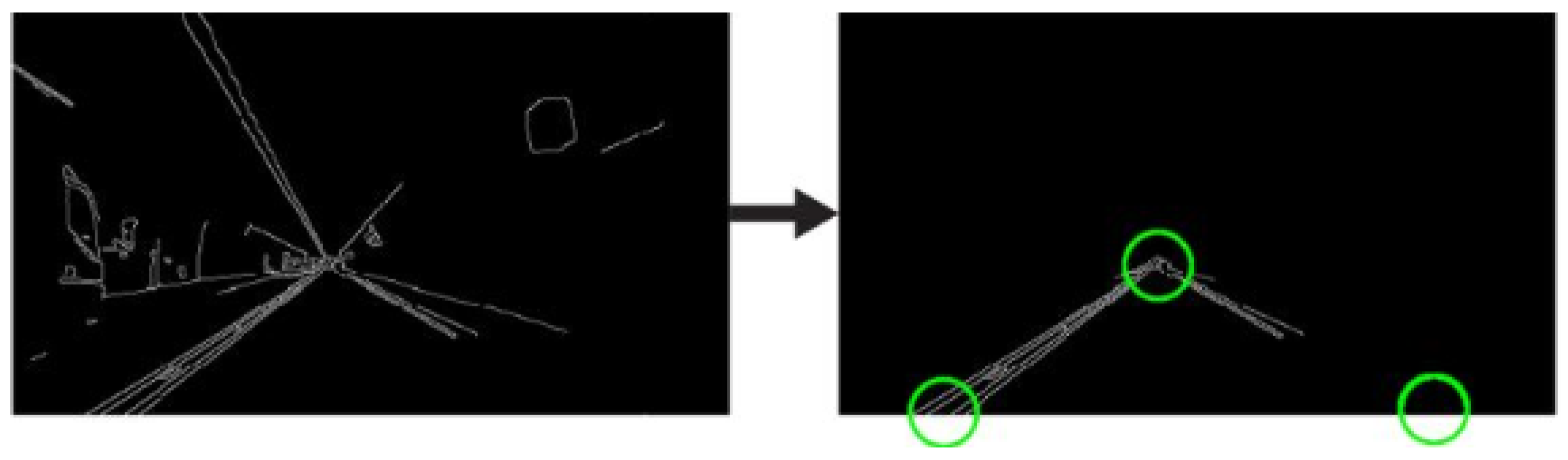
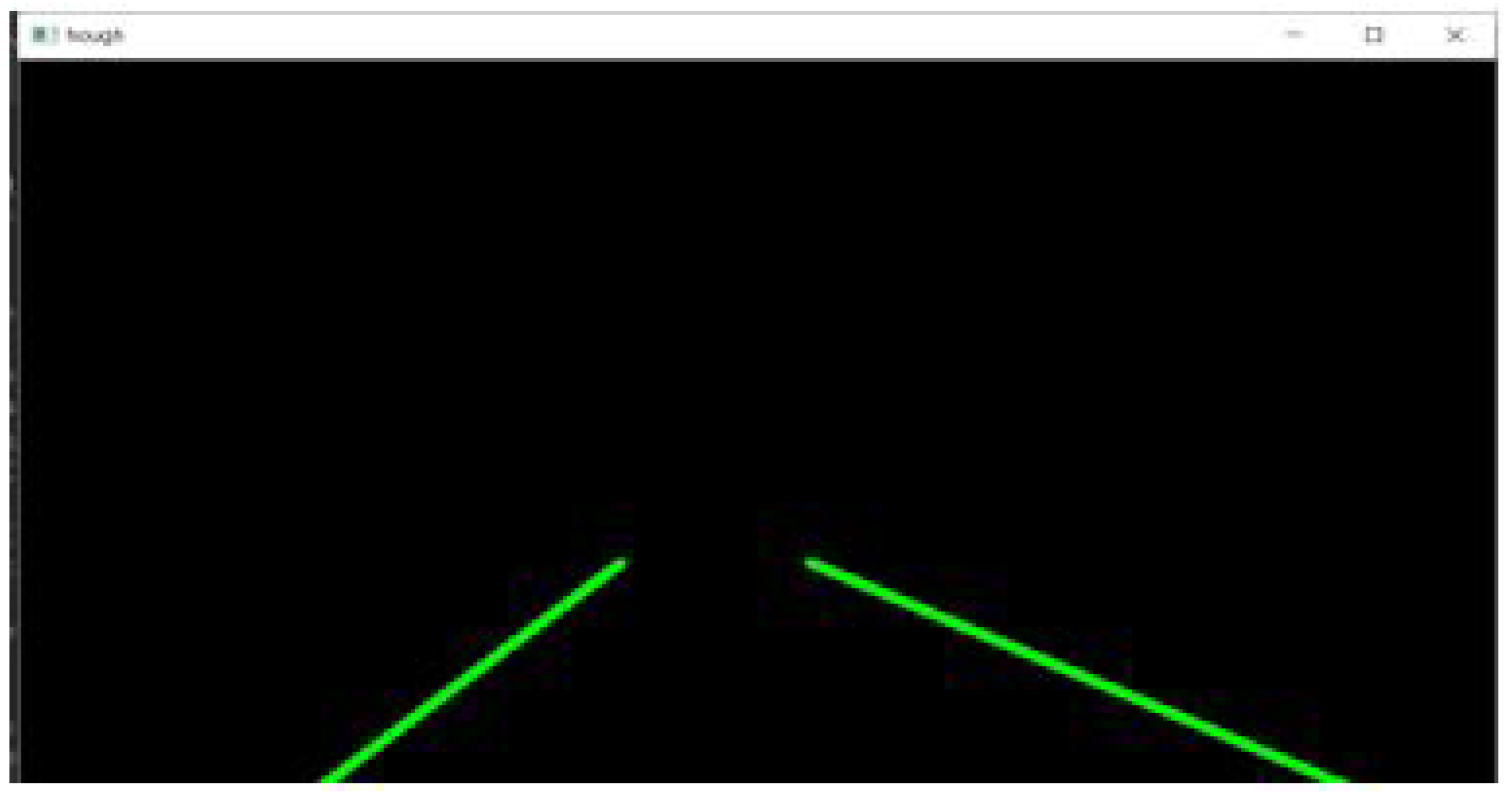
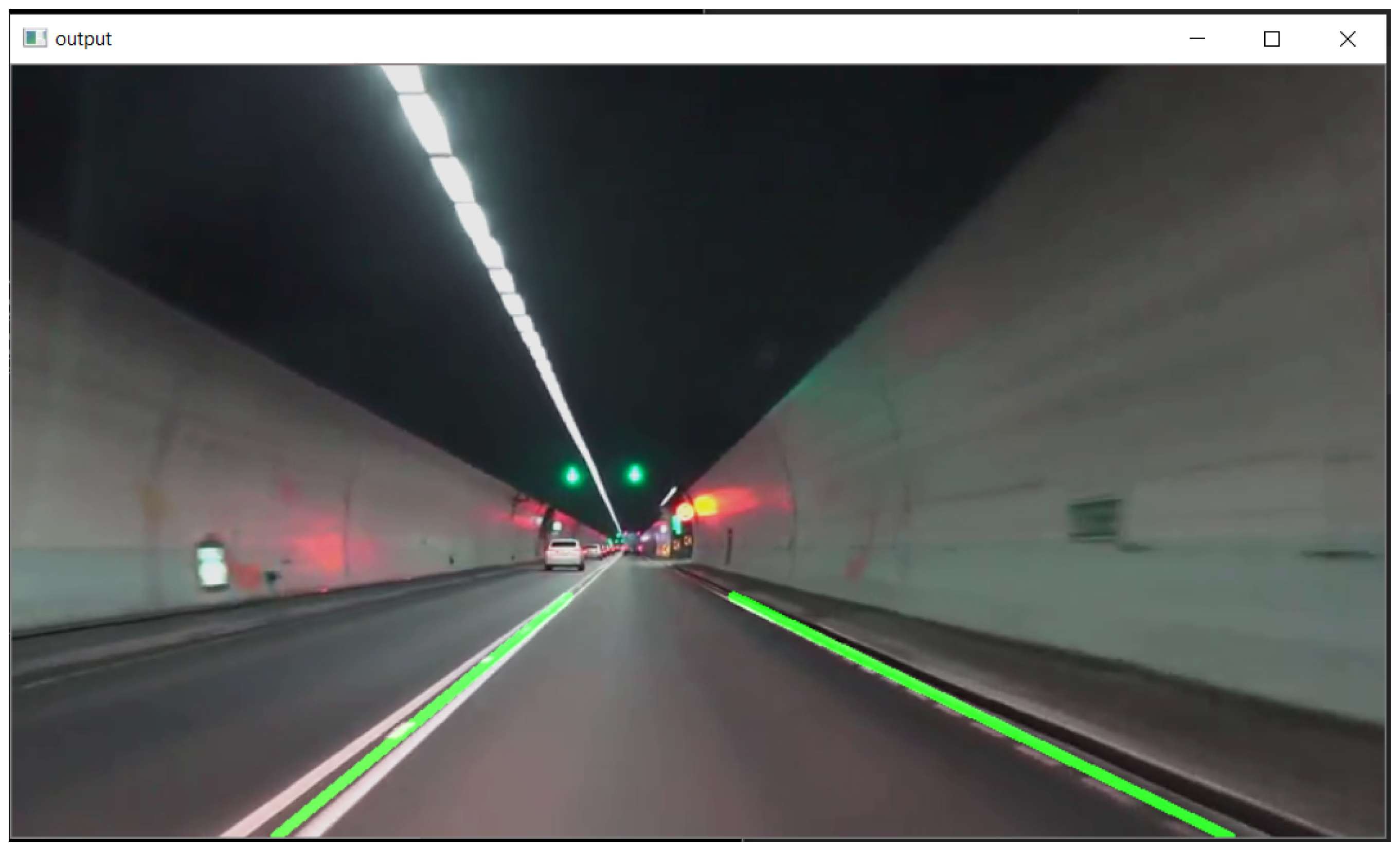
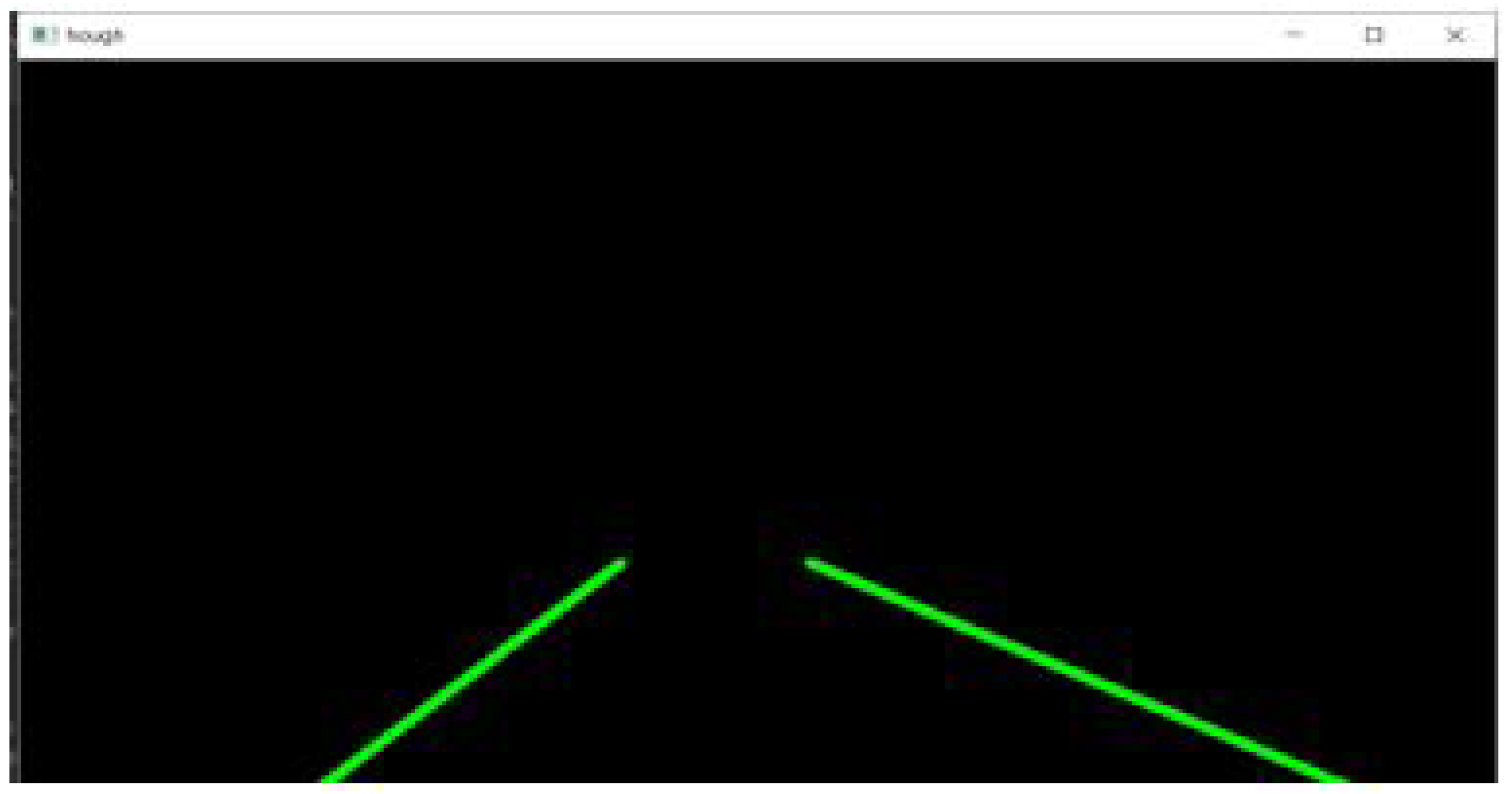
- Hough line transform: The Hough line transform [49] is a transform used to detect straight lines. The probabilistic Hough line transform is used here; this gives the extremes of the highlighted pixels of the image. This is the final step in the lane detection process and is done to find the “Lane markings” on the road. This is given mathematically byThe Hough space lines intersect at = 0.925 and r = 9.6. The curve in the polar coordinate system is given as , and a single line crossing through all these points can be given asPython code for Hough transform:hough = cv . HoughLinesP ( segment , 2 ,np . pi / 180 , 100 ,np . array ( [ ] ) , minLineLength = 100,maxLineGap = 50 )l i n e s = c a l c u l a t e_l i n e s ( frame , hough )
4.2. Case Study 2: Detection of Curved Lane Roads Using OpenCV
- Correcting the camera’s distortion: This involves undistorting the camera view to obtain a distinct sky view and vehicle views of the road ahead. The main cause of the change in size and shape of an object is mainly because of image distortion while being captured. This leads to a major problem: the object may appear to be closer or farther away than it actually is. All the distortion image data points can be extracted by theoretically comparing them to the actual data points which can be calculated. This is done by calling the pickle function, which is shown by the Python code below:def undistort ( img , cal_dir=r’cal_pickle . p’ ):with open ( cal_dir, mode=’rb’ ) as f :file = pickle . load ( f )mtx = file [ ’mtx’ ]dist = file [ ’dist’ ]dst = cv2 . undistort ( img , mtx , dist ,None , mtx )return dst
- Changing the perspective: The sky view perspective (bird’s eye view) is transformed into the vehicle view. For extracting all the image information, location coordinates are used to wrap the image from the calculated sky view to the required vehicle view. This is necessary because the further functions, such as applying colour filters and Sobel operators, are required to process the vehicle’s perspective view [50].
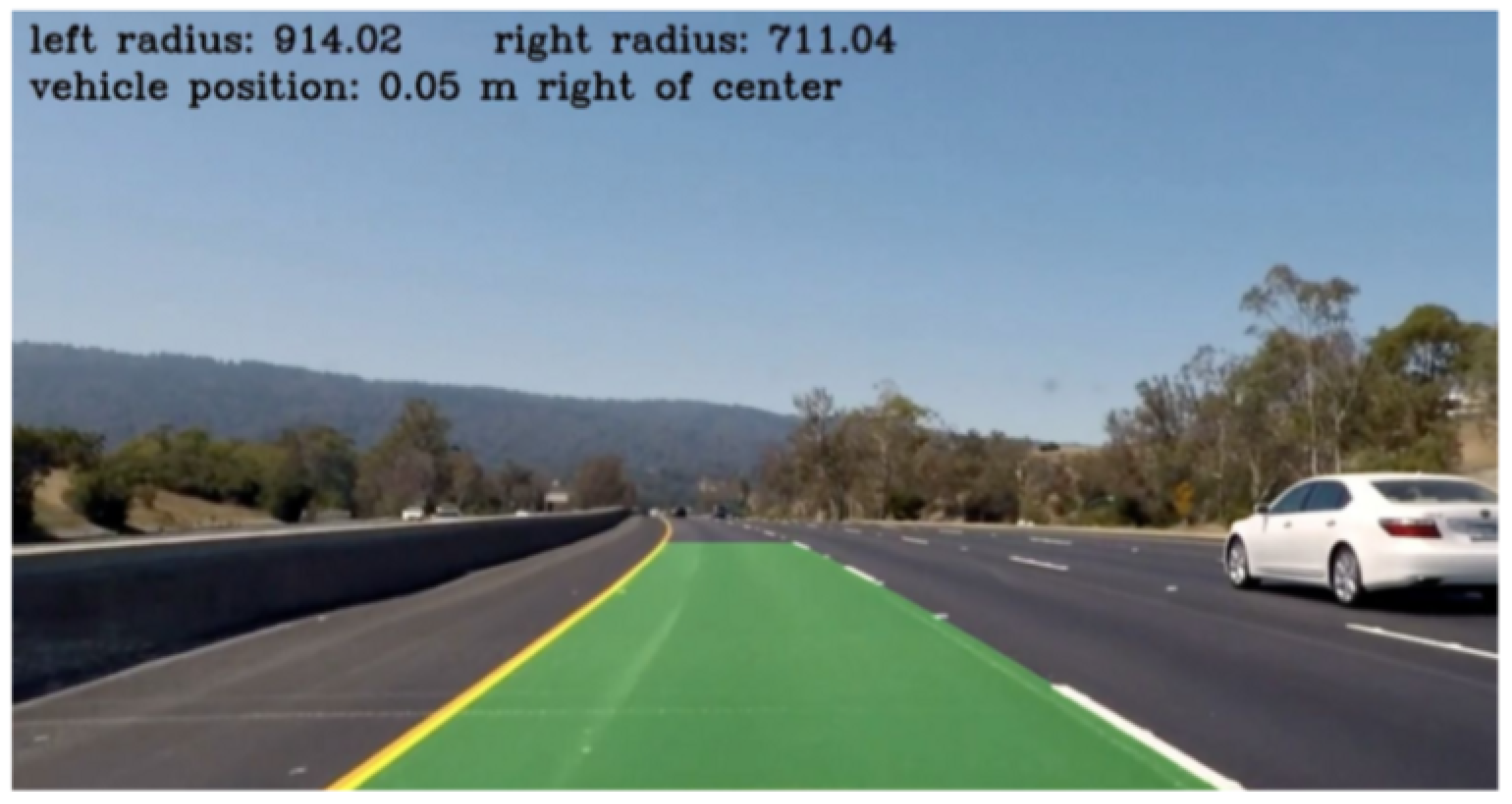
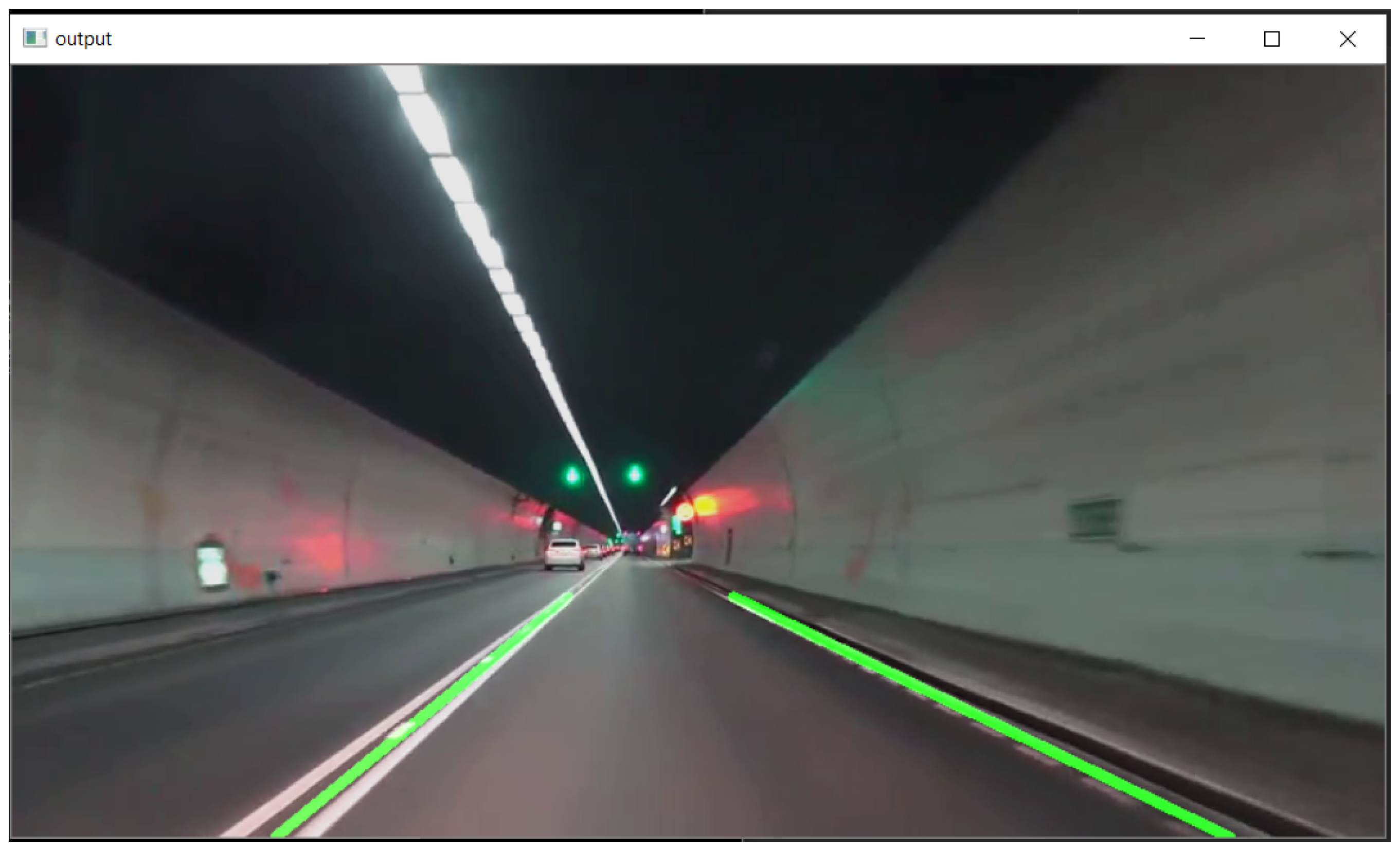
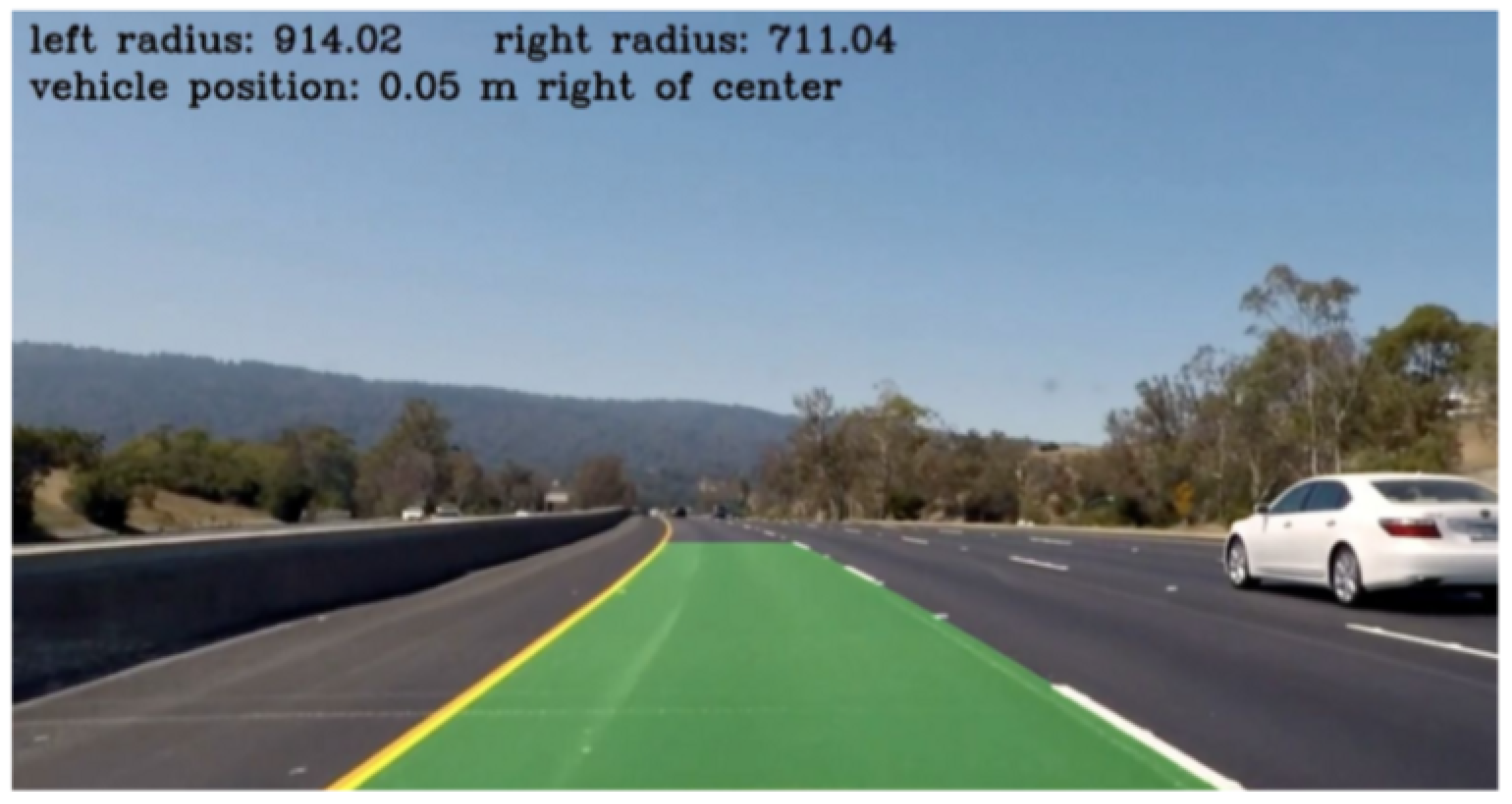
- Applying colour filters: The defined pixel values present in the ROI polygon are enough to calculate the curvature of the road. As an added precaution, there might be an error in distinguishing certain yellow and white markings on the lanes which may not actually be lanes, but markings to denote something else. In order to distinguish this, the filter mainly uses the Sobel operator [50]. The Sobel operator works by calculating the gradient of image intensity in the pixels present in the image. It is observed that this operator is very useful during the assessment of the maximum change of intensity from a lighter pixel to a darker pixel. It also helps to calculate the rate of change in the direction. It also emphatically shows how abruptly or smoothly the image changes at each pixel and how correctly the pixel represents an edge [51].The hue, saturation, and value (HSV) is a colour model that is often used in place of the RGB colour model for image processing. While using this, a specified colour value is added with a white or black contrast biasing. This can also be called hue, saturation, and brightness (HSB) [52].RGB conversion:Hue calculation:Saturation calculation:Value calculation is given bydef colorFilter ( img ):hsv = cv2 . cvtColor ( img ,cv2 . COLOR_BGR2HSV)lowerYellow = np . array ( [ 18 , 94 , 140 ] )upperYellow = np . array ( [ 48 , 255 , 255 ] )lowerWhite = np . array ( [ 0 , 0 , 200 ] )upperWhite = np . array ( [ 255 , 255 , 255 ] )maskedWhite= cv2 . inRange ( hsv ,lowerWhite , upperWhite )maskedYellow = cv2 . inRange\\(hsv,lowerYellow , upperYellow )combinedImage = $cv2 . bitwise_or$\\(maskedWhite , maskedYellow)return combinedImageA curve is fit for each line by using a second degree polynomial equation which is of the form , where A, B, and C are coefficients and are estimated by repeated trials of fitting the curve [53]. Then, the points which fit the curve the best are fed, and the curve is realized. Then, this curve is projected to the corresponding vehicle view, which is explained in the perspective transformation section. The program also gives the radius of curvature of the curved road. The output is shown in Figure 5.
4.3. Case Study 3: Behaviour Planning and Safe Lane Change Prediction Systems
4.3.1. Phase 1: Model Learning Phase
- Experience collection:This randomly interacts with the environment to produce a batch of experience, which is quantified as shown in the equation below:
- Building a dynamics model:This dynamic model uses a structured model which is derived from linear time-invariant (LTI) systems. This model can be represented by the equation below:where (x, u) denotes the state and action. Intuitively, each point is obtained (, ), as well as the linearization of the true dynamics f with respect to (x, u). The next step involves parameterizing A and B as two fully connected networks with one hidden layer.
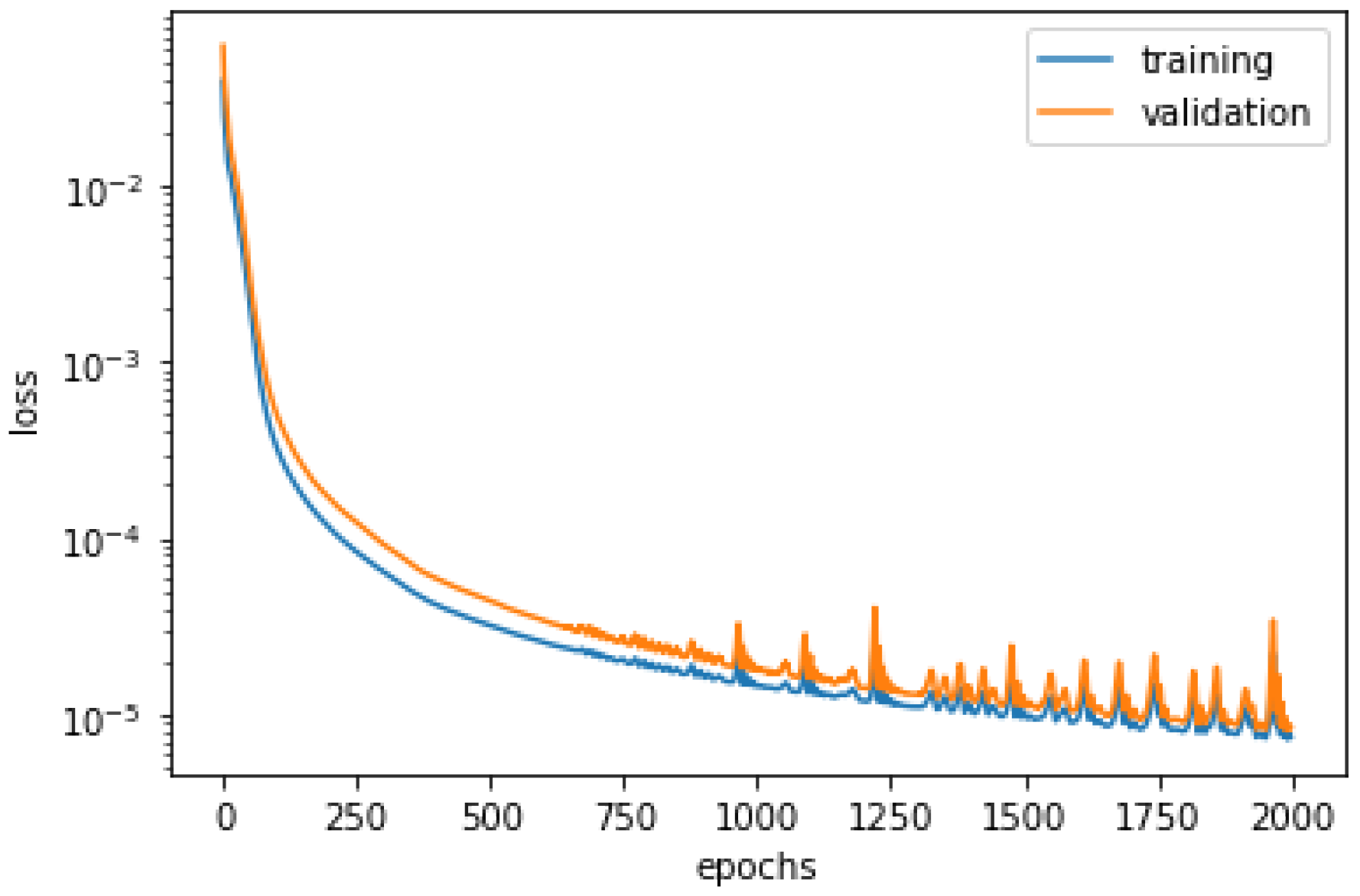
- Fit the model on the validation and training dataset:The built dynamic model (f) is trained in a supervised fashion to minimise the loss over the experience batch (D) by using stochastic gradient descent, i.e., one example at a time for 2000 epochs, as shown in Figure 6. As there is only one training set, as the number of epochs increased, the validation error also increased (above 2000), which indicated over fitting of the data. Thus, to avoid this, the number of epochs is set to be 2000, since, higher than this, an increased deviation in the validation dataset compared to the training dataset was observed.
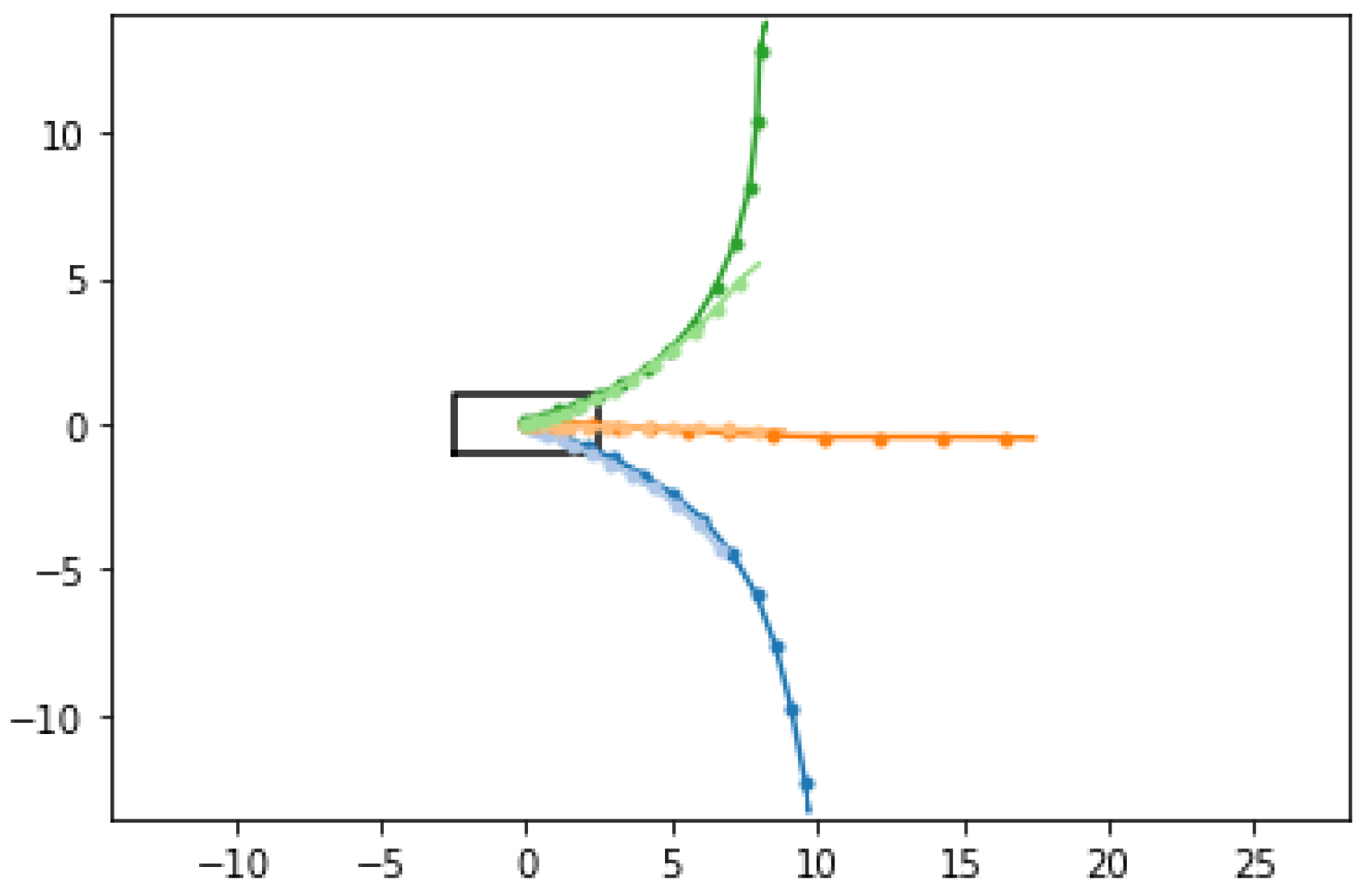
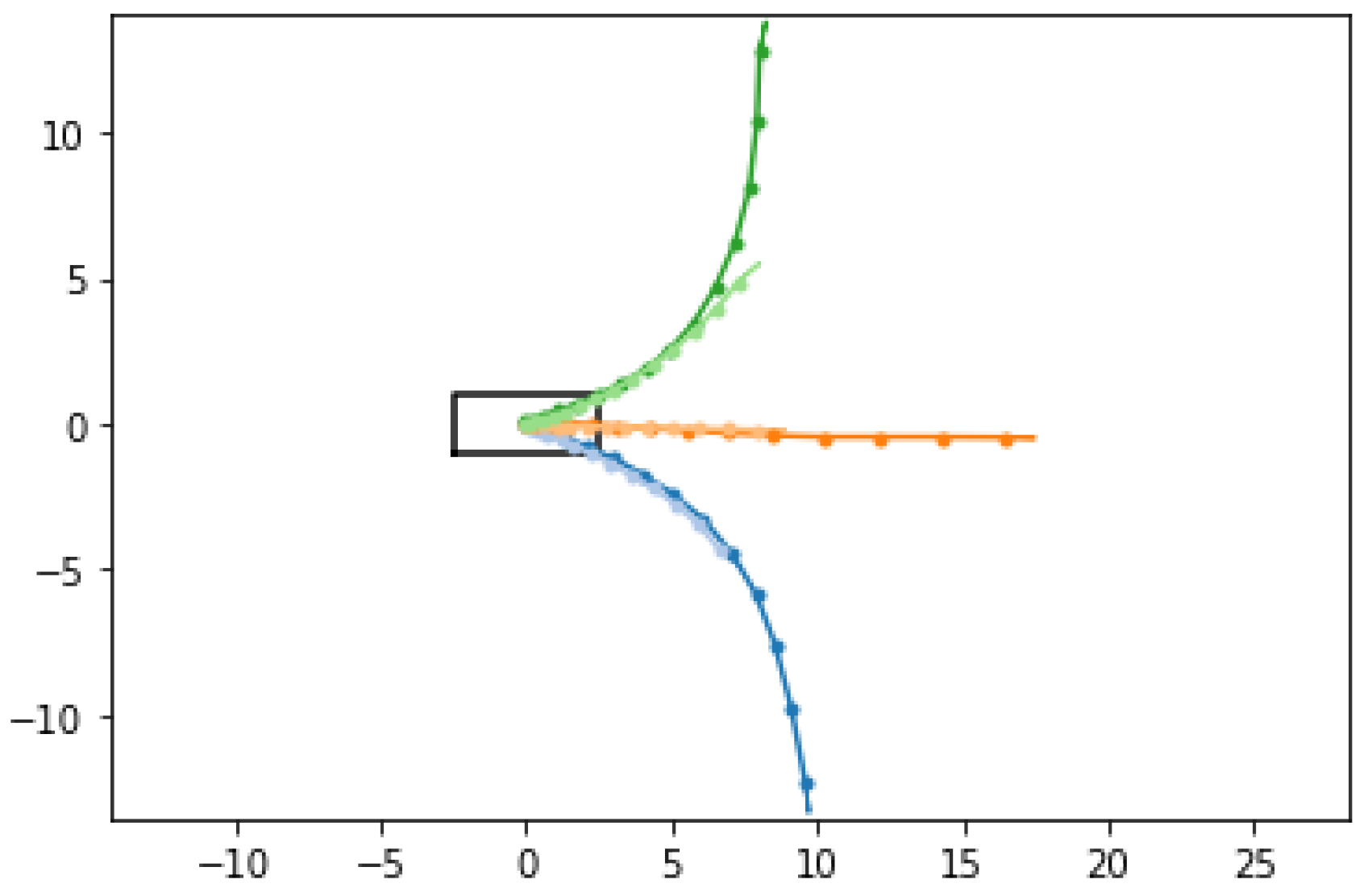
- Visualising trained dynamics and trajectories:In order to qualitatively evaluate the above-trained dynamic model (f), the values of the steering angle (such as right, centre, left) and acceleration (slow, fast) must be defined in order to predict and visualize the corresponding trajectories from an initial state, as shown in Figure 7.
- Reward model: Here, it is assumed that the reward R(s, a) is known (chosen by the system designer) and takes the form of a weighted L1-norm between the state and the goal. The simulation considers the reward of a sample transition: tensor([−0.4329]).
4.3.2. Phase 2: Planning Phase
- Drawing the samples from a probability distribution which uses Gaussian distributions over the sequence of actions.
- Minimizing the cross-entropy [55] between the given and the target distribution to better the sample in the next distribution.
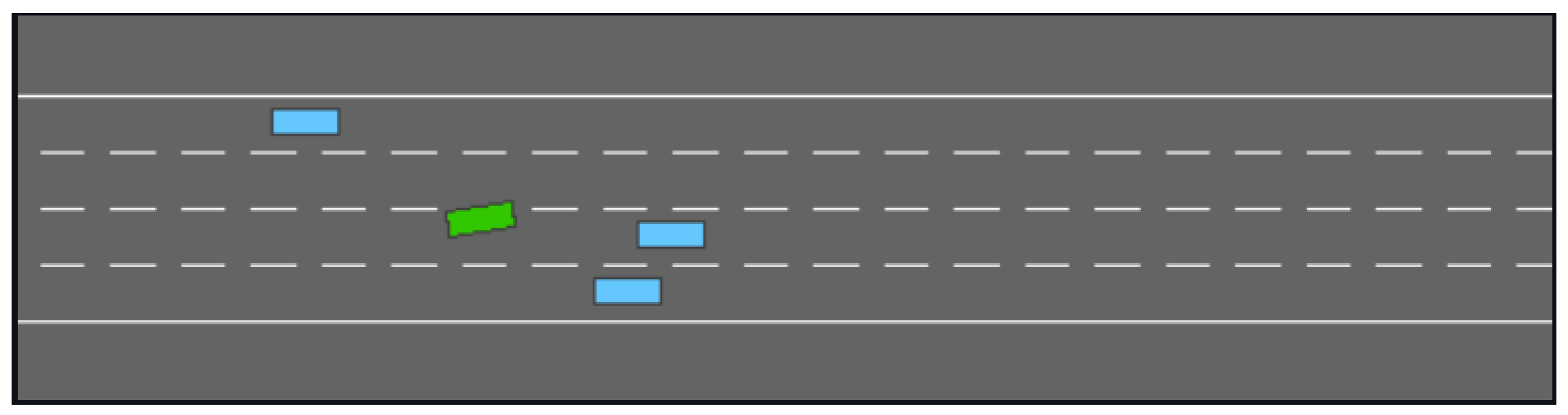
- HighwayIn the highway environment, the ego vehicle (indicated in green as shown in Figure 8) is being driven on a four-lane, one-way highway with all incoming vehicles in the same direction. The main objective of the optimisation algorithm here is to find the most optimal speed and also avoid possible collisions with the neighbouring incoming vehicles. Driving in the right lane of the road is rewarded by the reward function (as discussed in MRL phase).
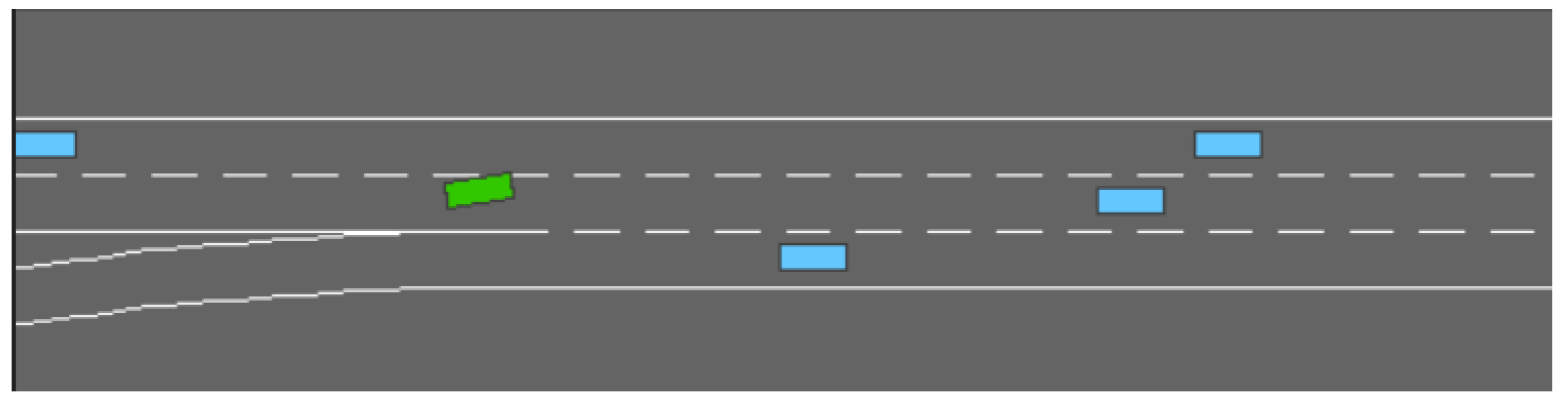
- Merging of lanesIn this environment, the ego vehicle initially starts on the main highway, and an access or a service road is joined with the main highway, along with its incoming vehicles. In this environment, the main objective of the optimisation algorithm is to maintain the most optimal speed, making space and avoiding collisions with the incoming vehicles from the service lane, as shown in Figure 9.
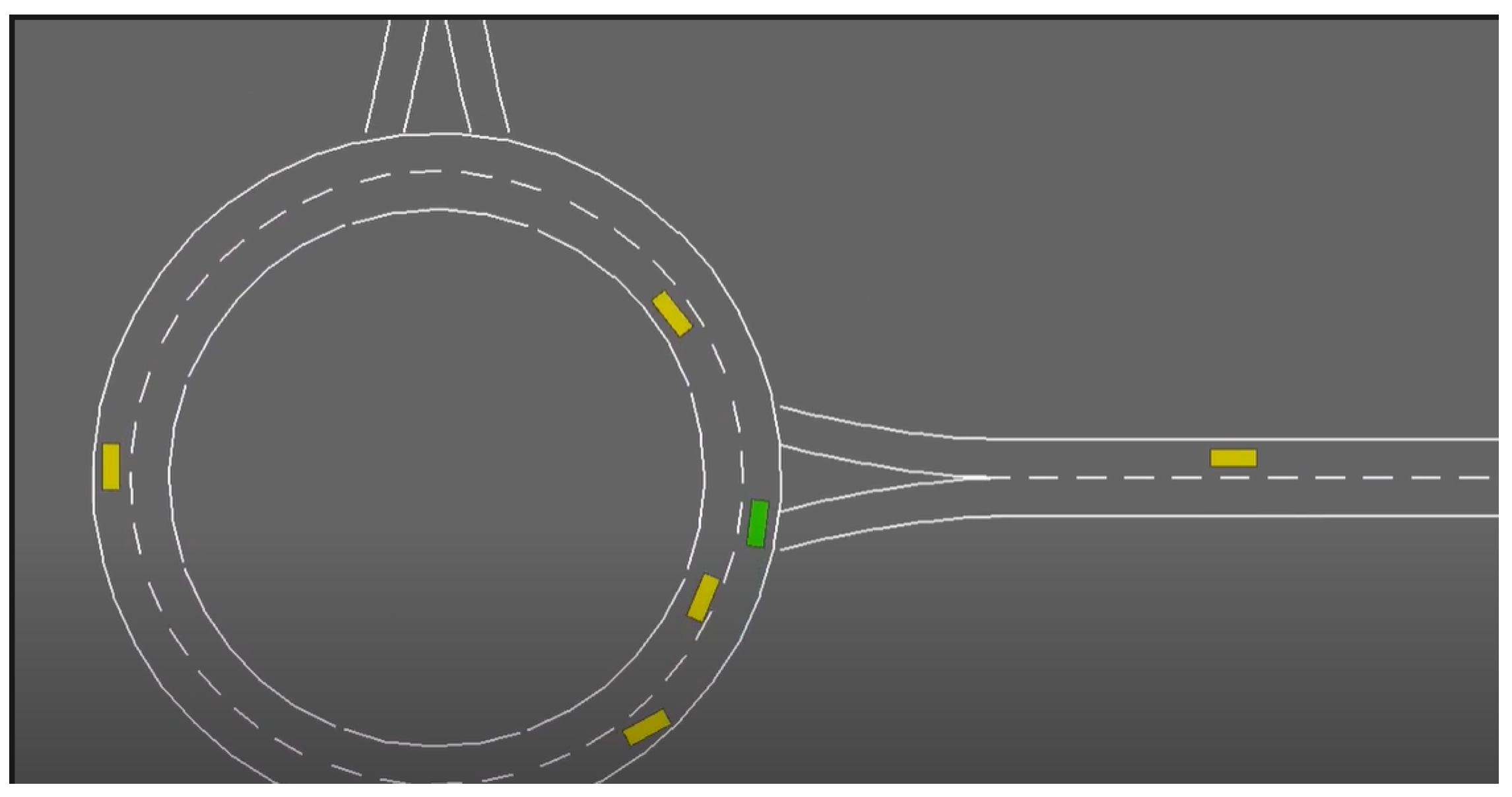
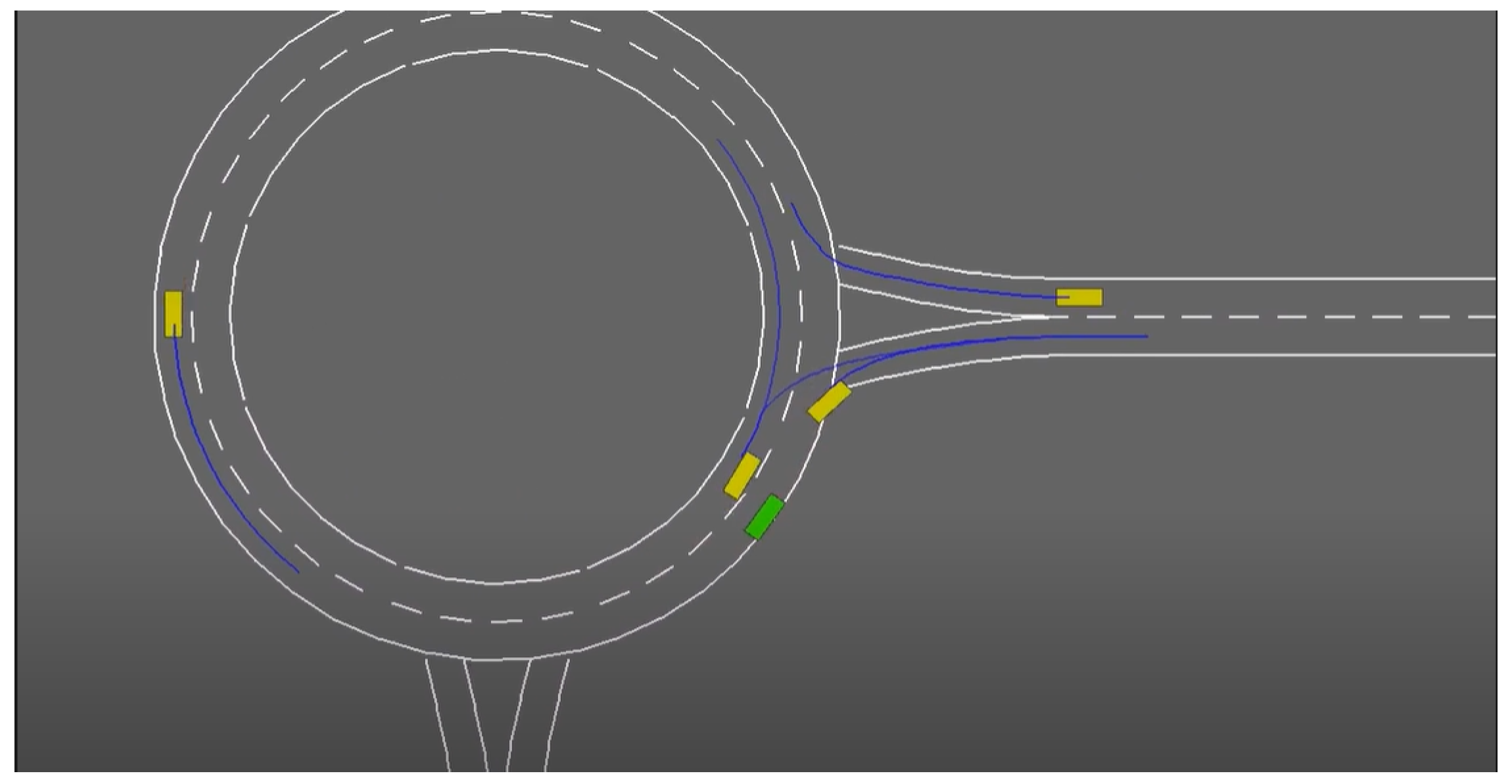
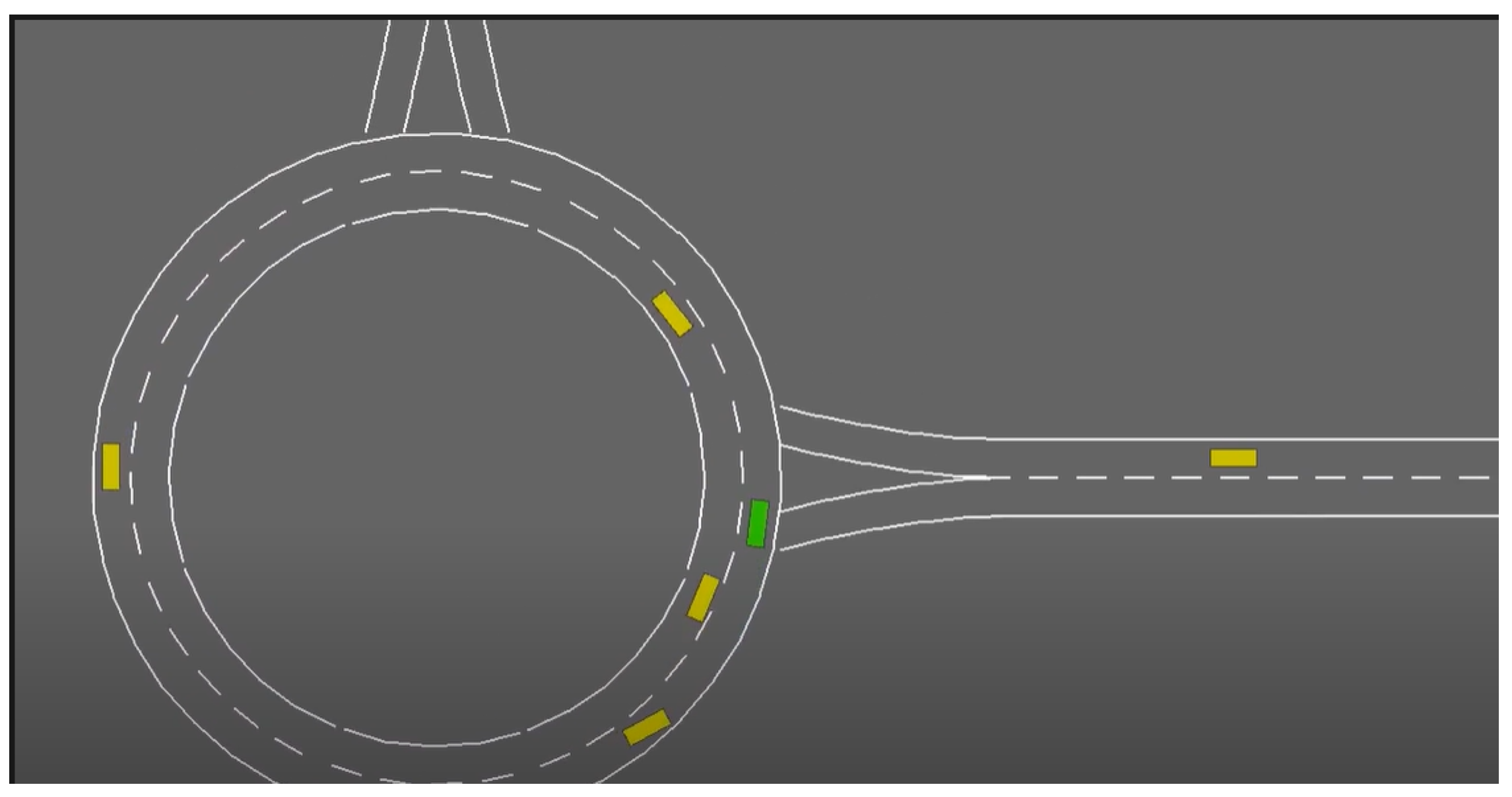
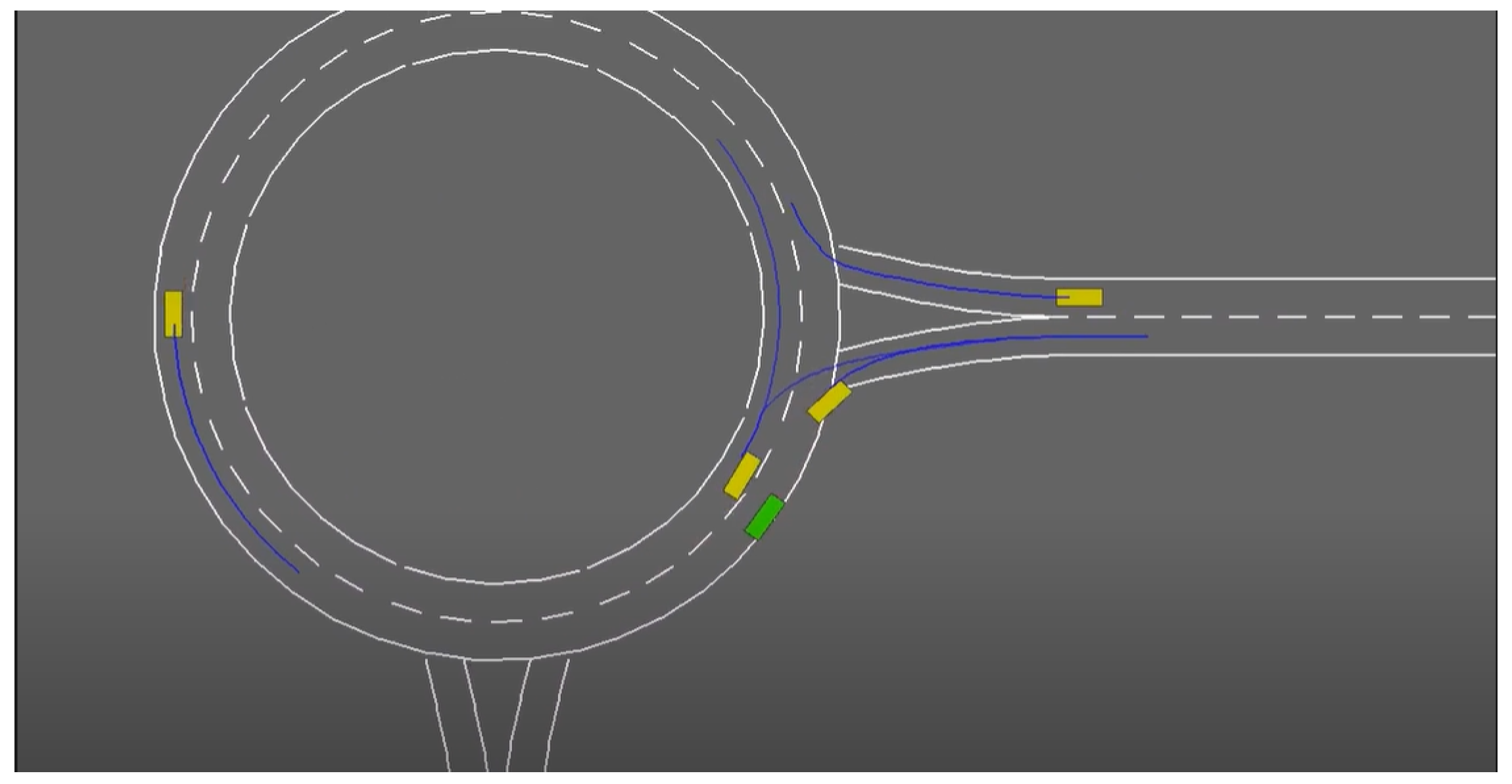
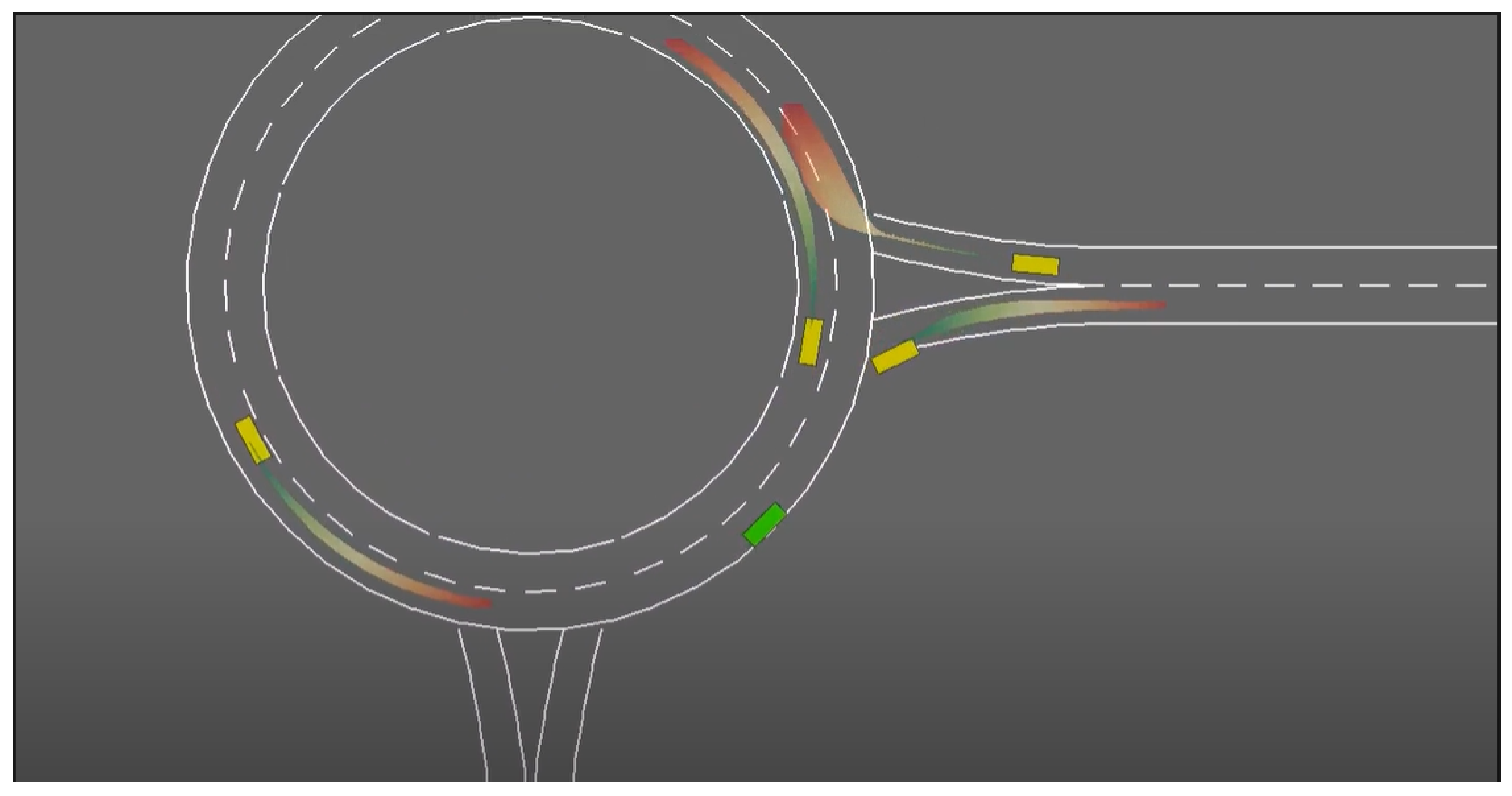
- RoundaboutIn this environment, the ego vehicle is approaching and negotiating a roundabout circle with four incoming roads. In this case, the function of the optimisation algorithm is to maintain the most optimal speed, to avoid all possible collisions within the roundabout, and to make space for the incoming vehicles from the connecting road. To optimise it further, optimum planning with the oracle model is applied, as shown in Figure 10. The oracle model utilizes the system constraints and related behaviours which may result in dangerous behaviours.The slight model errors in the oracle model can lead to catastrophic accidents and crashes, as shown in Figure 11. This occurs because the optimisation is not calibrated to the probability of the trajectory that the surrounding or adjacent vehicles can take. It affects the ego vehicle, as it ignores the trajectory of surrounding vehicles even when it is predictable.In order to account for this model’s uncertainty, a robust control framework is implemented, as shown in Figure 12, to maximise the worst case performance with respect to a set of possible behaviours, which is done by considering every possible direction that the traffic participants can take at their next intersection.It is important to take into consideration the driving styles and behaviour of the traffic participants, and this can be implemented by the robust planning with continuous ambiguity. It continuously “predicts” the trajectory of the adjacent vehicles while also considering their driving styles, as shown in Figure 13.
5. Further Studies and Scope
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| Symbol | Quantity |
| S | Given set of states |
| A | The action state |
| O | The observation space |
| Z | The uncertainty of the sensor reading |
| T | The uncertainty of the system dynamics and the surrounding environment |
| R | The optimum function produced for the state known as the reward function |
| The discount factor which is in the range of [0,1) | |
| X2 | The end position of ego vehicle |
| X1 | The initial position of the neighbouring vehicle |
| Vajd | The velocity of the neighbouring vehicle |
| Vego | The velocity of the ego vehicle |
| Tmanoeuvre | The time it takes to finish the manoeuvre |
| Xsafety | The additional safety distance for extra tolerance |
| r | Radius of curvature of the road |
| Angle between the intersected Hough lines | |
| Final internal force between the ith and (i + 1)th elastic band node | |
| Initial internal force between the ith and (i + 1)th elastic band node | |
| Displacement of the ith knot | |
| Displacement of the i + 1th knot | |
| Displacement of the i − 1th knot | |
| ks | Spring constant in the range (0, 1] |
| External force acting at the ith node element |
References
- SAE International Releases Updated Visual Chart for Its “Levels of Driving Automation” Standard for Self-Driving Vehicles. Available online: https://www.sae.org/news/press-room/2018/12/sae-international-releases-updated-visual-chart-for-its-%E2%80%9Clevels-of-driving-automation%E2%80%9D-standard-for-self-driving-vehicles (accessed on 15 December 2020).
- Rathour, S.S.; Ishigooka, T.; Otsuka, S.; MARTIN, R. Runtime Active Safety Risk-Assessment of Highly AutonomousVehicles for Safe Nominal Behavior; SAE Technical Paper 2020-01-0107; SAE International: Seville, Spain, 2020. [Google Scholar] [CrossRef]
- Udacity’s Self Driving Nano Degree Programme. Available online: https://www.udacity.com/course/self-driving-car-engineer-nanodegree--nd013 (accessed on 15 November 2020).
- Kukkala, V.K.; Tunnell, J.; Pasricha, S.; Bradley, T. Advanced Driver-Assistance Systems: A Path Toward Autonomous Vehicles. IEEE Consum. Electron. Mag. 2018, 7, 18–25. [Google Scholar] [CrossRef]
- Gelbal, S.Y.; Zhu, S.; Anantharaman, G.A.; Guvenc, B.A.; Guvenc, L. Cooperative Collision Avoidance in a Connected Vehicle Environment; SAE Technical Paper 2019-01-0488; SAE International: Warrendale, PA, USA, 2019. [Google Scholar] [CrossRef]
- Nugraha, B.T.; Su, S.F. Towards self-driving car using convolutional neural network and road lane detector. In Proceedings of the 2017 2nd International Conference on Automation, Cognitive Science, Optics, Micro Electro–Mechanical System, and Information Technology (ICACOMIT), Jakarta, Indonesia, 23–24 October 2017; pp. 65–69. [Google Scholar] [CrossRef]
- Latham, A.; Nattrass, M. Autonomous vehicles, car-dominated environments, and cycling: Using anethnography of infrastructure to reflect on the prospects of a newtransportation technology. J. Transp. Geogr. 2019, 81, 102539. [Google Scholar] [CrossRef]
- Brechtel, S.; Gindele, T.; Dillmann, R. Probabilistic Decision-Making under Uncertainty for Autonomous Driving Using Continuous POMDP. In Proceedings of the IEEE 17th International Conference on Intelligent Transportation Systems (ITSC), Qingdao, China, 8–11 October 2014. [Google Scholar] [CrossRef]
- Berns, K. Off-road robotics-perception and navigation. In Proceedings of the 2014 11th International Conference on Informatics in Control, Automation and Robotics (ICINCO), Vienna, Austria, 1–3 September 2014; pp. IS-9–IS-11. [Google Scholar]
- Berecz, C.E.; Kiss, G. Dangers in autonomous vehicles. In Proceedings of the 2018 IEEE 18th International Symposium on Computational Intelligence and Informatics (CINTI), Budapest, Hungary, 21–22 November 2018; pp. 000263–000268. [Google Scholar] [CrossRef]
- Wei, J.; Dolan, J.M.; Snider, J.M.; Litkouhi, B. A point-based MDP for robust single-lane autonomous driving behavior under uncertainties. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 2586–2592. [Google Scholar] [CrossRef]
- Pressman, A. Waymo Reaches 20 Million Miles of Autonomous Driving. Fortune. 7 January 2020. Available online: https://fortune.com/2020/01/07/googles-waymo-reaches-20-million-miles-of-autonomous-driving/ (accessed on 8 July 2020).
- Colwell, I.; Phan, B.; Saleem, S.; Salay, R.; Czarnecki, K. An Automated Vehicle Safety Concept Based on Runtime Restriction of the Operational Design Domain. In Proceedings of the 2018 IEEE Intelligent Vehicles Symposium (IV), Changshu, China, 26–30 June 2018; pp. 1910–1917. [Google Scholar] [CrossRef]
- Korosec, K. Watch a Waymo Self-Driving Car Test Its Sensors in a Haboob. Techcrunch. 23 August 2019. Available online: https://techcrunch.com/2019/08/23/watch-a-waymo-self-driving-car-test-its-sensors-in-a-haboob/ (accessed on 2 August 2020).
- Highway-Env, Leurent, Edouard, An Environment for Autonomous Driving Decision-Making, GitHub, GitHub Repository. 2018. Available online: https://github.com/eleurent/highway-env (accessed on 12 September 2020).
- Anaya, J.J.; Merdrignac, P.; Shagdar, O.; Nashashibi, F.; Naranjo, J.E. Vehicle to pedestrian communications for protection of vulnerable road users. In Proceedings of the 2014 IEEE Intelligent Vehicles Symposium Proceedings, Dearborn, MI, USA, 8–11 June 2014; pp. 1037–1042. [Google Scholar] [CrossRef] [Green Version]
- SAE Standards News J3016 Automated-Driving Graphic Update 2019-01-07 JENNIFER SHUTTLEWORTH SAE Updates J3016 Levels of Automated Driving Graphic to Reflect Evolving Standard. Available online: https://www.sae.org/news/2019/01/sae-updates-j3016-automated-driving-graphic (accessed on 12 September 2020).
- Shuttleworth, J. SAE Standards News: J3016 Automated-Driving Graphic Update. 7 January 2019. Available online: https://www.sae.org/news/2019/01/sae-updates-j3016-automated-driving-graphic (accessed on 16 October 2020).
- Gnatzig, S.; Schuller, F.; Lienkamp, M. Human-machine interaction as key technology for driverless driving-A trajectory-based shared autonomy control approach. In Proceedings of the 2012 IEEE RO-MAN: The 21st IEEE International Symposium on Robot and Human Interactive Communication, Paris, France, 9–13 September 2012; pp. 913–918. [Google Scholar] [CrossRef]
- Al Zamil, M.G.; Samarah, S.; Rawashdeh, M.; Hossain, M.S.; Alhamid, M.F.; Guizani, M.; Alnusair, A. False-Alarm Detection in the Fog-Based Internet of Connected Vehicles. IEEE Trans. Veh. Technol. 2019, 68, 7035–7044. [Google Scholar] [CrossRef]
- Qian, Y.; Chen, M.; Chen, J.; Hossain, M.S.; Alamri, A. Secure Enforcement in Cognitive Internet of Vehicles. IEEE Internet Things J. 2018, 5, 1242–1250. [Google Scholar] [CrossRef]
- Nanda, A.; Puthal, D.; Rodrigues, J.J.P.C.; Kozlov, S.A. Internet of Autonomous Vehicles Communications Security: Overview, Issues, and Directions. IEEE Wirel. Commun. 2019, 26, 60–65. [Google Scholar] [CrossRef]
- Jameel, F.; Chang, Z.; Huang, J.; Ristaniemi, T. Internet of Autonomous Vehicles: Architecture, Features, and Socio-Technological Challenges. IEEE Wirel. Commun. 2019, 26, 21–29. [Google Scholar] [CrossRef] [Green Version]
- Qian, Y.; Jiang, Y.; Hu, L.; Hossain, M.S.; Alrashoud, M.; Al-Hammadi, M. Blockchain-Based Privacy-Aware Content Caching in Cognitive Internet of Vehicles. IEEE Netw. 2020, 34, 46–51. [Google Scholar] [CrossRef]
- Chou, F.; Shladover, S.E.; Bansal, G. Coordinated merge control based on V2V communication. In Proceedings of the 2016 IEEE Vehicular Networking Conference (VNC), Columbus, OH, USA, 8–10 December 2016; pp. 1–8. [Google Scholar] [CrossRef]
- Nie, J.; Zhang, J.; Ding, W.; Wan, X.; Chen, X.; Ran, B. Decentralized Cooperative Lane-Changing Decision-Making for Connected Autonomous Vehicles*. IEEE Access 2016, 4, 9413–9420. [Google Scholar] [CrossRef]
- Qian, S.; Zhang, T.; Xu, C.; Hossain, M.S. Social event classification via boosted multimodal supervised latent dirichlet allocation. ACM Trans. Multimed. Comput. Commun. Appl. 2015, 11, 27.1–27.22. [Google Scholar] [CrossRef]
- Yang, X.; Zhang, T.; Xu, C.; Hossain, M.S. Automatic Visual Concept Learning for Social Event Understanding. IEEE Trans. Multimed. 2015, 17, 346–358. [Google Scholar] [CrossRef]
- Norman, G.; Parker, D.; Zou, X. Verification and control of partially observable probabilistic systems. Real-Time Syst. 2017, 53, 354–402. [Google Scholar] [CrossRef] [Green Version]
- Bouton, M.; Cosgun, A.; Kochenderfer, M.J. Belief state planning for autonomously navigating urban intersections. In Proceedings of the 2017 IEEE Intelligent Vehicles Symposium (IV), Los Angeles, CA, USA, 11–14 June 2017; pp. 825–830. [Google Scholar] [CrossRef] [Green Version]
- Babu, M.; Oza, Y.; Singh, A.K.; Krishna, K.M.; Medasani, S. Model Predictive Control for Autonomous Driving Based on Time Scaled Collision Cone. In Proceedings of the 2018 European Control Conference (ECC), Limassol, Cyprus, 12–15 June 2018; pp. 641–648. [Google Scholar] [CrossRef] [Green Version]
- Mizushima, Y.; Okawa, I.; Nonaka, K. Model Predictive Control for Autonomous Vehicles with Speed Profile Shaping. IFAC-PapersOnLine 2019, 52, 31–36. [Google Scholar] [CrossRef]
- Yurtsever, E.; Lambert, J.; Carballo, A.; Takeda, K. A Survey of Autonomous Driving: Common Practices and Emerging Technologies. IEEE Access 2020, 8, 58443–58469. [Google Scholar] [CrossRef]
- Lertniphonphan, K.; Komorita, S.; Tasaka, K.; Yanagihara, H. 2D to 3D Label Propagation For Object Detection In Point Cloud. In Proceedings of the 2018 IEEE International Conference on Multimedia and Expo Workshops (ICMEW), San Diego, CA, USA, 23–27 July 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Hu, X.; Xu, X.; Xiao, Y.; Chen, H.; He, S.; Qin, J.; Heng, P.A. SINet: A Scale-Insensitive Convolutional Neural Network for Fast Vehicle Detection. IEEE Trans. Intell. Transp. Syst. 2019, 20, 1010–1019. [Google Scholar] [CrossRef] [Green Version]
- Yang, X.; Zhang, T.; Xu, C.; Yan, S.; Hossain, M.S.; Ghoneim, A. Deep Relative Attributes. IEEE Trans. Multimed. 2016, 18, 1832–1842. [Google Scholar] [CrossRef]
- Pan, X.; Shi, J.; Luo, P.; Wang, X.; Tang, X. Spatial as Deep: Spatial CNN for Traffic Scene Understanding. The Chinese University of Hong Kong. SenseTime Group Limited. Available online: https://www.aaai.org/ocs/index.php/AAAI/AAAI18/paper/viewFile/16802/16322 (accessed on 11 January 2021).
- Liu, R.W.; Nie, J.; Garg, S.; Xiong, Z.; Zhang, Y.; Hossain, M.S. Data-Driven Trajectory Quality Improvement for Promoting Intelligent Vessel Traffic Services in 6G-Enabled Maritime IoT Systems. IEEE Internet Things J. 2020, 8, 5374–5385. [Google Scholar] [CrossRef]
- Lee, J.; Park, S. New interconnection methodology of TSNs using V2X communication. In Proceedings of the 2017 IEEE 7th Annual Computing and Communication Workshop and Conference (CCWC), Las Vegas, NV, USA, 9–11 January 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Abou-zeid, H.; Pervez, F.; Adinoyi, A.; Aljlayl, M.; Yanikomeroglu, H. Cellular V2X Transmission for Connected and Autonomous Vehicles Standardization, Applications, and Enabling Technologies. IEEE Consum. Electron. Mag. 2019, 8, 91–98. [Google Scholar] [CrossRef]
- Gelbal, S.Y.; Arslan, S.; Wang, H.; Aksun-Guvenc, B.; Guvenc, L. Elastic band based pedestrian collision avoidance using V2X communication. In Proceedings of the 2017 IEEE Intelligent Vehicles Symposium (IV), Los Angeles, CA, USA, 11–14 June 2017; pp. 270–276. [Google Scholar] [CrossRef]
- An, H.; Jung, J.I. Design of a Cooperative Lane Change Protocol for a Connected and Automated Vehicle Based on an Estimation of the Communication Delay. Sensors 2018, 18, 3499. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhang, X.; Peng, M.; Yan, S.; Sun, Y. Deep-Reinforcement-Learning-Based Mode Selection and Resource Allocation for Cellular V2X Communications. IEEE Internet Things J. 2020, 7, 6380–6391. [Google Scholar] [CrossRef] [Green Version]
- Chen, L.C.; Papandreou, G.; Kokkinos, I.; Murphy, K.; Yuille, A.L. DeepLab: Semantic Image Segmentation with Deep Convolutional Nets, Atrous Convolution, and Fully Connected CRFs. arXiv 2017, arXiv:1606.00915v2. [Google Scholar] [CrossRef]
- Pan, B.; Lu, Z.; Xie, H. Mean Intensity Gradient: An Effective Global Parameter for Quality Assessment of the Speckle Patterns Used in Digital Image Correlation. Opt. Lasers Eng. 2010, 48, 469–477. [Google Scholar] [CrossRef]
- Hou, Z.; Liu, X.; Chen, L. Object Detection Algorithm for Improving Non-Maximum Suppression Using GIoU. IOP Conf. Ser. Mater. Sci. Eng. 2020, 790, 012062. [Google Scholar] [CrossRef]
- George Seif Semantic Segmentation with Deep Learning. Available online: https://towardsdatascience.com/semantic-segmentation-with-deep-learning-a-guideand-code-e52fc8958823 (accessed on 13 November 2020).
- Lee, J.; Lian, F.; Lee, H. Region Growing Approach on Detecting Drivable Space for Intelligent Autonomous Vehicles. In Proceedings of the 2018 7th International Congress on Advanced Applied Informatics (IIAI-AAI), Yonago, Japan, 8–13 July 2018; pp. 972–973. [Google Scholar] [CrossRef]
- Shehata, A.; Mohammad, S.; Abdallah, M.; Ragab, M. A Survey on Hough Transform, Theory, Techniques and Applications. arXiv 2015, arXiv:1502.02160. [Google Scholar]
- Feng, Y.; Rong-ben, W.; Rong-hui, Z. Based on Digital Image Lane Edge Detection and Tracking under Structure Environment for Autonomous Vehicle. In Proceedings of the 2007 IEEE International Conference on Automation and Logistics, Jinan, China, 18–21 August 2007; pp. 1310–1314. [Google Scholar] [CrossRef]
- Misra, S.; Yaokun, W. Machine Learning for Subsurface Characterization; Gulf Professional Publishing: Houston, TX, USA, 2020. [Google Scholar] [CrossRef]
- Najafi Kajabad, E. Detection of Vehicle and Brake Light Based on Cascade and HSV Algorithm in Autonomous Vehicle. In Proceedings of the 2018 International Conference on Industrial Engineering, Applications and Manufacturing (ICIEAM), Moscow, Russia, 15–18 May 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Mithi Road Lane Lines Detection Using Advanced Computer Vision Techniques. Available online: https://medium.com/@mithi/advanced-lane-finding-using-computer-vision-techniques7f3230b6c6f2 (accessed on 10 February 2020).
- Okuyama, T.; Gonsalves, T.; Upadhay, J. Autonomous Driving System based on Deep Q Learnig. In Proceedings of the 2018 International Conference on Intelligent Autonomous Systems (ICoIAS), Singapore, 1 March 2018; pp. 201–205. [Google Scholar] [CrossRef]
- Barthelme, A.; Wiesmayr, R.; Utschick, W. Model Order Selection in DoA Scenarios via Cross-entropy Based Machine Learning Techniques. In Proceedings of the ICASSP 2020—2020 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Barcelona, Spain, 4–8 May 2020; pp. 4622–4626. [Google Scholar] [CrossRef] [Green Version]
- Chavhan, S.; Gupta, D.; Garg, S.; Khanna, A.; Choi, B.J.; Hossain, M.S. Privacy and Security Management in Intelligent Transportation System. IEEE Access 2020, 8, 148677–148688. [Google Scholar] [CrossRef]
- Zhang, Y.; Li, Y.; Wang, R.; Hossain, M.S.; Lu, H. Multi-Aspect Aware Session-Based Recommendation for Intelligent Transportation Services. IEEE Trans. Intell. Transp. Syst. 2020. [Google Scholar] [CrossRef]
- Bellan, R.; Alamalhodaei, A. Top four highlights of Elon Musk’s Tesla AI Day. 20 August 2021. Available online: https://techcrunch.com/2021/08/19/top-five-highlights-of-elon-musks-tesla-ai-day/ (accessed on 12 October 2020).
- Allam, Z. Achieving Neuroplasticity in Artificial Neural Networks through Smart Cities. Smart Cities 2019, 2, 118–134. [Google Scholar] [CrossRef] [Green Version]
- Allam, Z.; Dhunny, Z.A. On big data, artificial intelligence and smart cities. Cities 2019, 89, 80–91. [Google Scholar] [CrossRef]
- Sharifi, A.; Allam, Z.; Feizizadeh, B.; Ghamari, H. Three Decades of Research on Smart Cities: Mapping Knowledge Structure and Trends. Sustainability 2021, 13, 7140. [Google Scholar] [CrossRef]
- Allam, Z. Cities and the Digital Revolution: Aligning Technology and Humanity; Springer International Publishing: Berlin/Heidelberg, Germany, 2020. [Google Scholar]
- Moreno, C.; Allam, Z.; Chabaud, D.; Gall, C.; Pratlong, F. Introducing the “15-Minute City”: Sustainability, Resilience and Place Identity in Future Post-Pandemic Cities. Smart Cities 2021, 4, 93–111. [Google Scholar] [CrossRef]
- Allam, Z.; Jones, D.S. Future (post-COVID) digital, smart and sustainable cities in the wake of 6G: Digital twins, immersive realities and new urban economies. Land Use Policy 2021, 101, 105201. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Definition |
|---|---|
| Acceleration Range | Range of acceleration of ego vehicle |
| Steering Range | Maximum and minimum steering angle of the ego vehicle |
| Actions All | Labels for all the actions performed by the ego vehicle |
| Actions Longit | Labels for the actions performed in the longitudinal plane |
| Actions Lat | Labels for the actions performed in the lateral plane |
| Max Speed | Maximum speed limit on the ego vehicle |
| Default Speeds | Default initial speed |
| Distance Wanted | Desired distance to the vehicle in front |
| Time Wanted | Time gap desired to the vehicle in front |
| Stripe Spacing | Distance between the road stripe and the edge of the road |
| Stripe Length | Length of the stripe |
| Stripe Width | Width of the stripe |
| Perception Distance | Distance the ego vehicle can perceive |
| Collisions Enabled | Ego vehicle is open for collisions which the system avoids |
| Parameter | Quantity |
|---|---|
| Acceleration Range | ms−2 |
| Steering Range | rad |
| Actions All | 0: ‘Lane Left’, 1: ‘Idle’, 2: ‘Lane Right’, 3: ‘Faster’, 4: ‘Slower’ |
| Actions Longit | 0: ‘Slower’, 1: ‘Idle’, 2: ‘Faster’ |
| Actions Lat | 0: ‘Lane Left’, 1: ‘Idle’, 2: ‘Lane Right’ |
| Max Speed | 40 ms−1 |
| Default Speeds | [23, 25] ms−1 |
| Distance Wanted | 10.0 m |
| Time Wanted | 1.5 s |
| Stripe Spacing | 5 m |
| Stripe Length | 3 m |
| Stripe Width | 0.3 m |
| Perception Distance | 180 m |
| Collisions Enabled | True |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dixit, A.; Kumar Chidambaram, R.; Allam, Z. Safety and Risk Analysis of Autonomous Vehicles Using Computer Vision and Neural Networks. Vehicles 2021, 3, 595-617. https://doi.org/10.3390/vehicles3030036
Dixit A, Kumar Chidambaram R, Allam Z. Safety and Risk Analysis of Autonomous Vehicles Using Computer Vision and Neural Networks. Vehicles. 2021; 3(3):595-617. https://doi.org/10.3390/vehicles3030036
Chicago/Turabian StyleDixit, Aditya, Ramesh Kumar Chidambaram, and Zaheer Allam. 2021. "Safety and Risk Analysis of Autonomous Vehicles Using Computer Vision and Neural Networks" Vehicles 3, no. 3: 595-617. https://doi.org/10.3390/vehicles3030036
APA StyleDixit, A., Kumar Chidambaram, R., & Allam, Z. (2021). Safety and Risk Analysis of Autonomous Vehicles Using Computer Vision and Neural Networks. Vehicles, 3(3), 595-617. https://doi.org/10.3390/vehicles3030036