


Morning Glory Flower Detection in Aerial Images Using Semi-Supervised Segmentation with Gaussian Mixture Models

 ,
, 
Abstract
1. Introduction
2. Materials and Methods
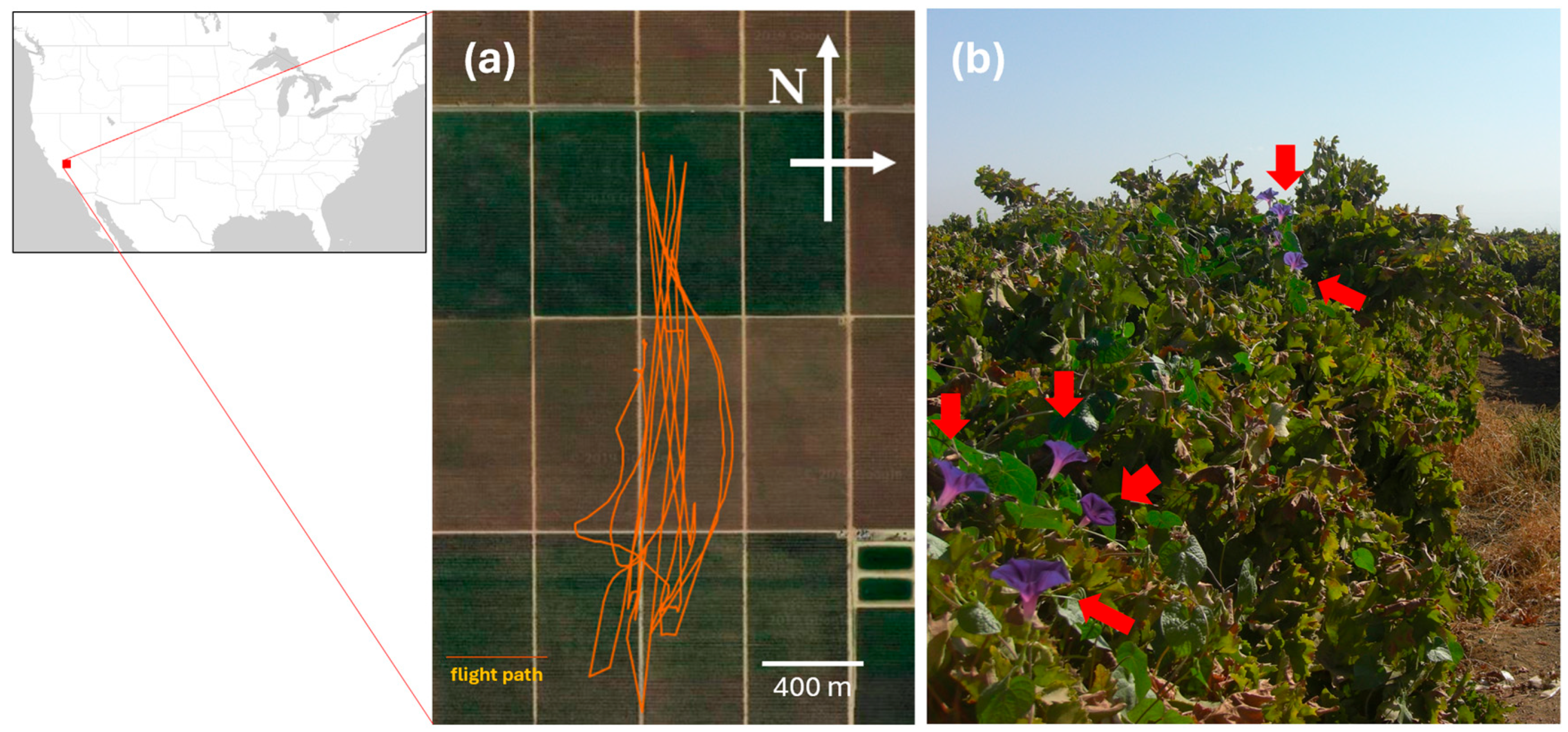
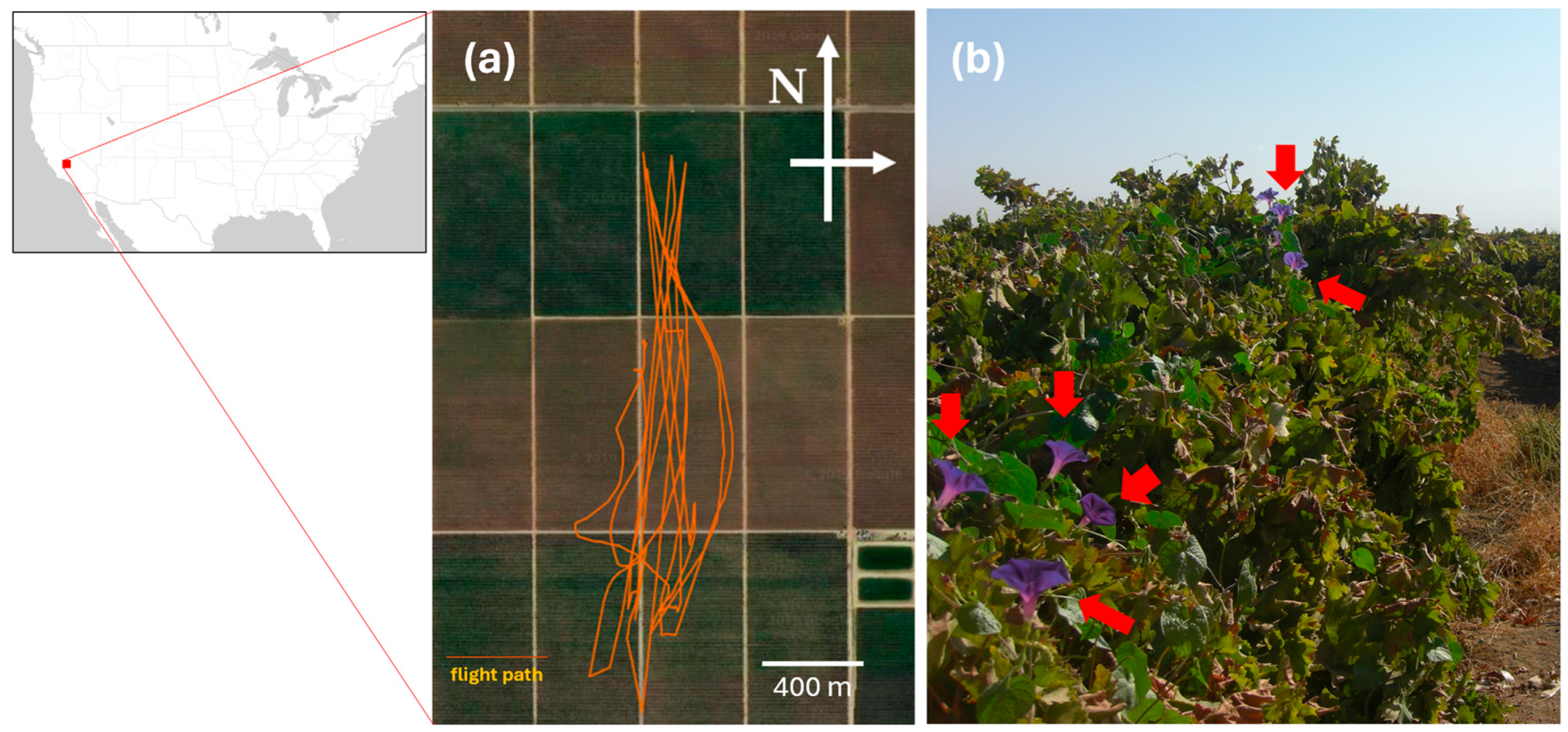
2.1. Study Site and Ground Truthing
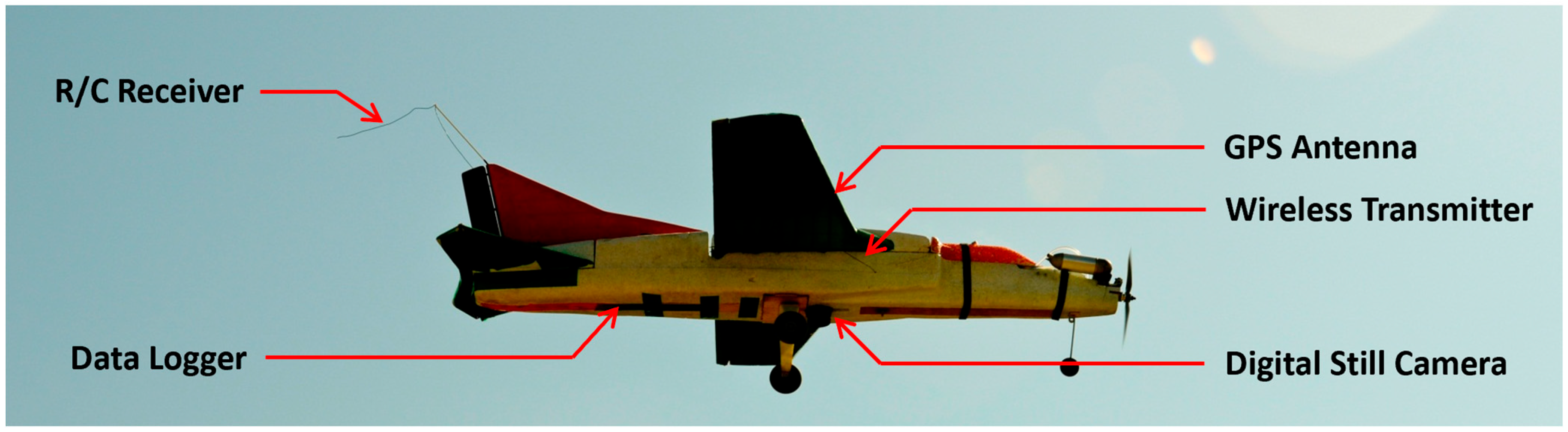
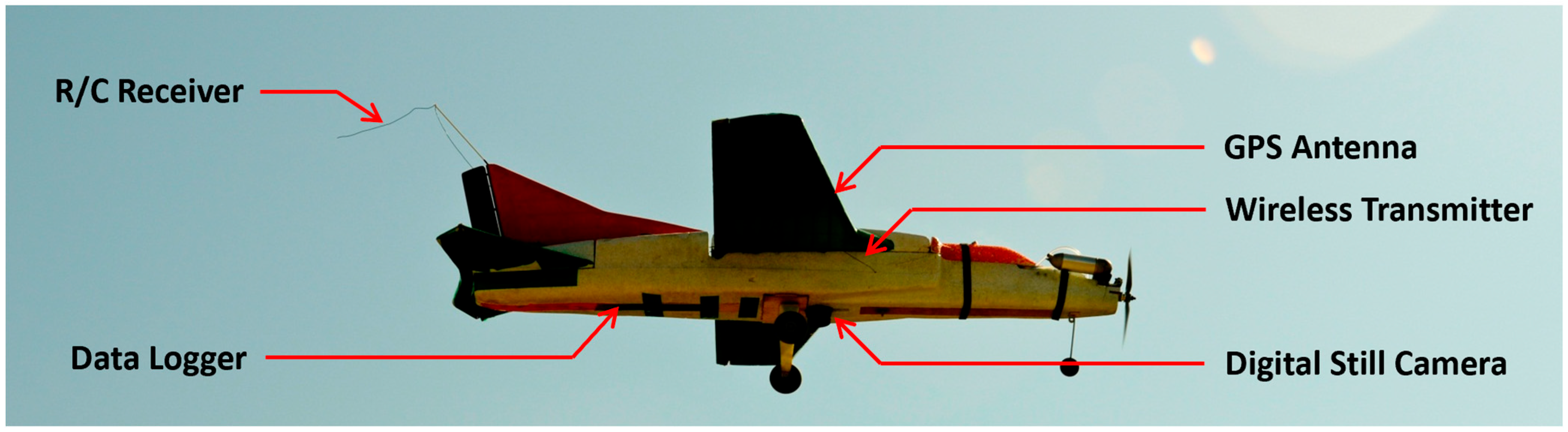
2.2. Unmanned Aircraft System (UAS) and Imaging System
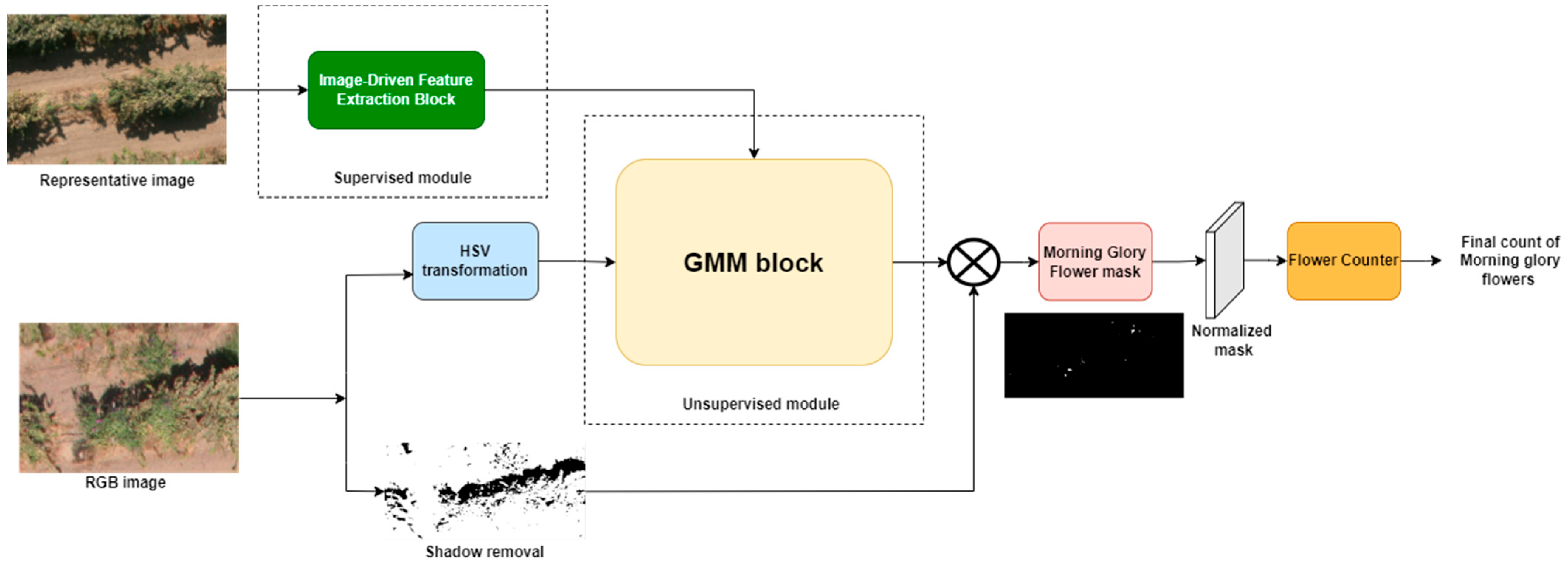
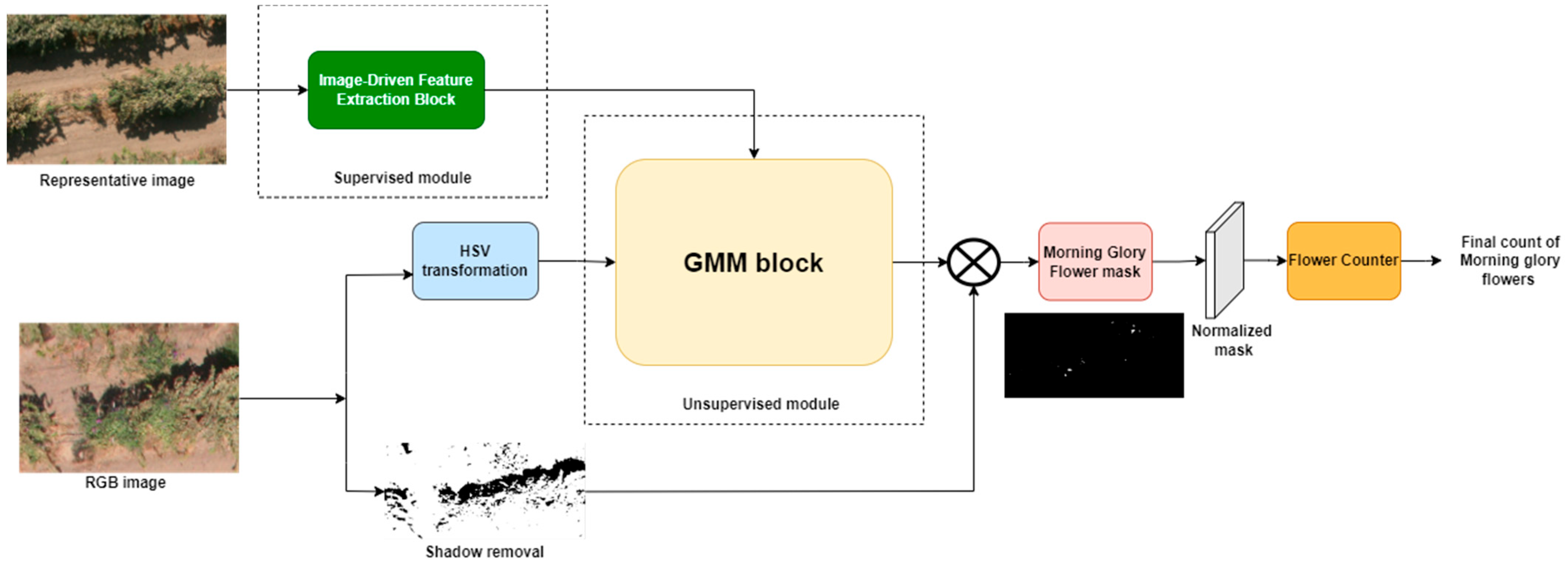
2.3. Machine Learning
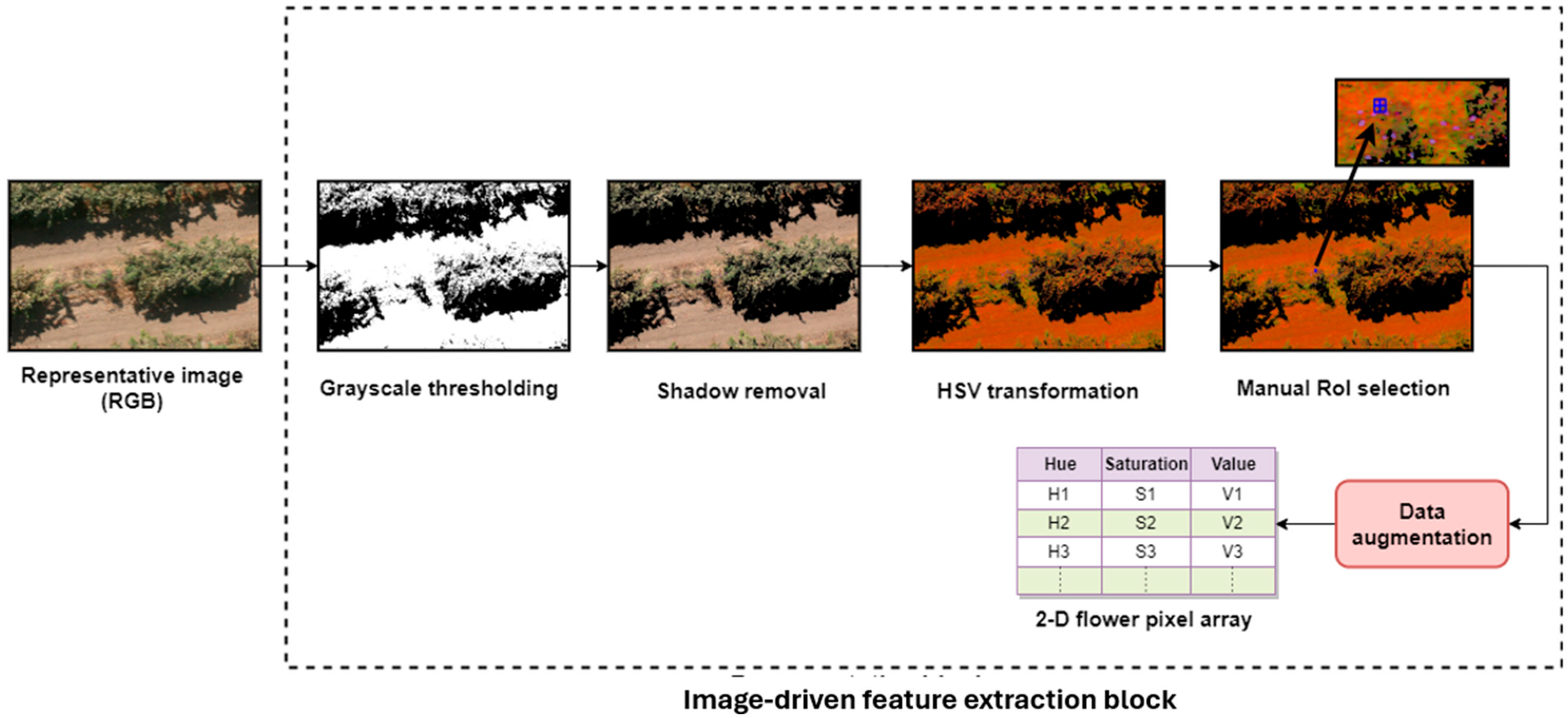
2.3.1. Image-Driven Feature Extraction Block
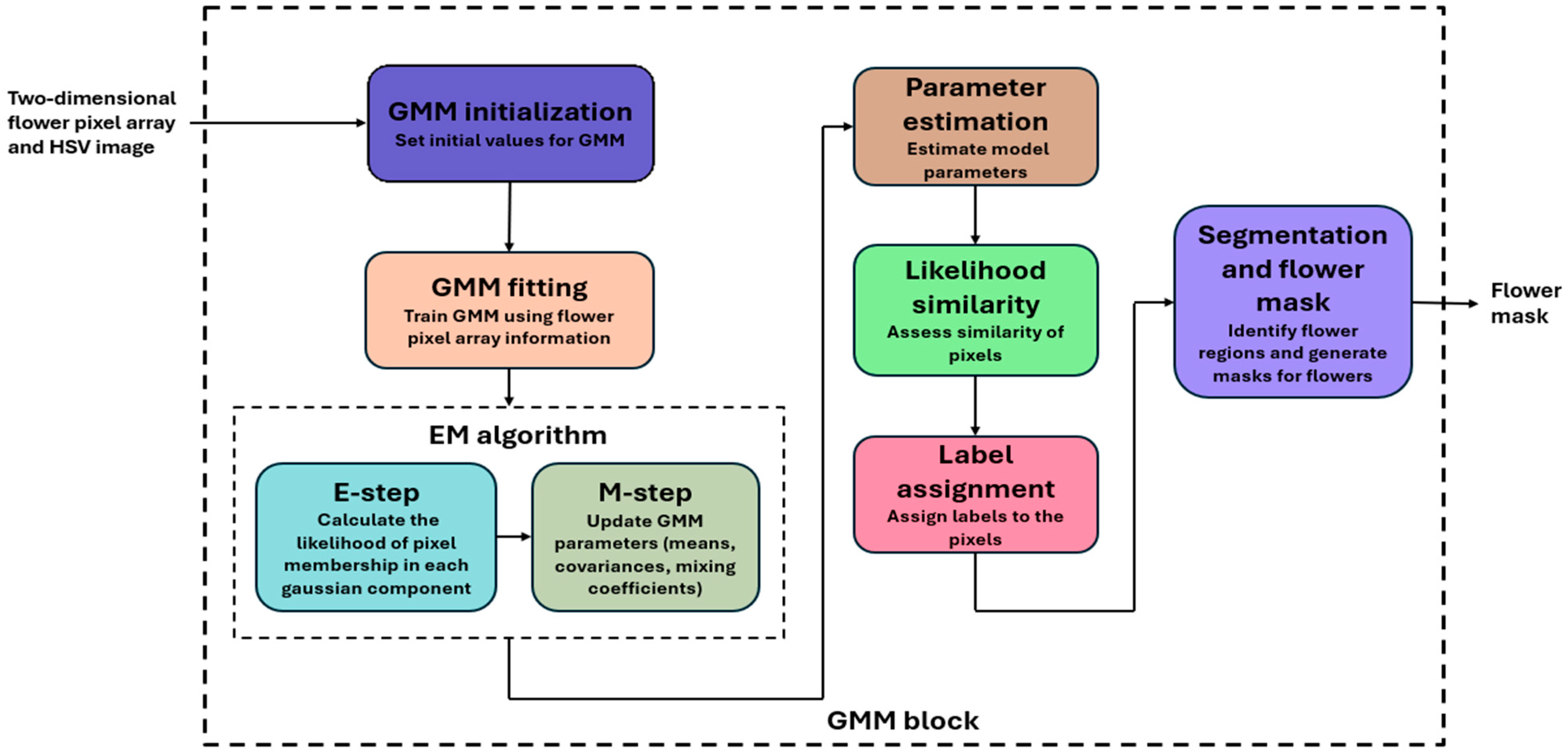
2.3.2. Gaussian Mixture Model (GMM) Initialization
The Expectation-Maximization (EM) Algorithm
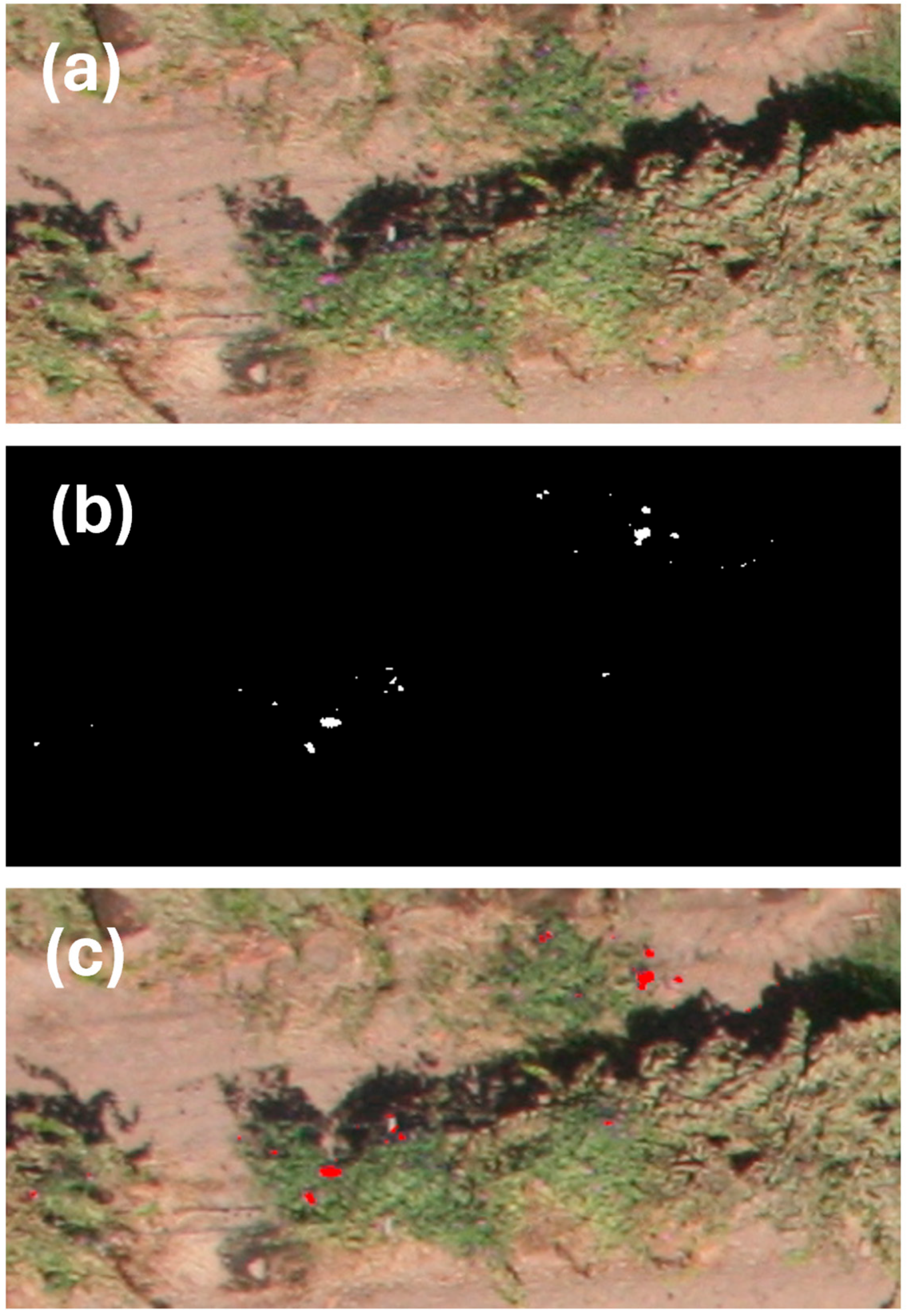
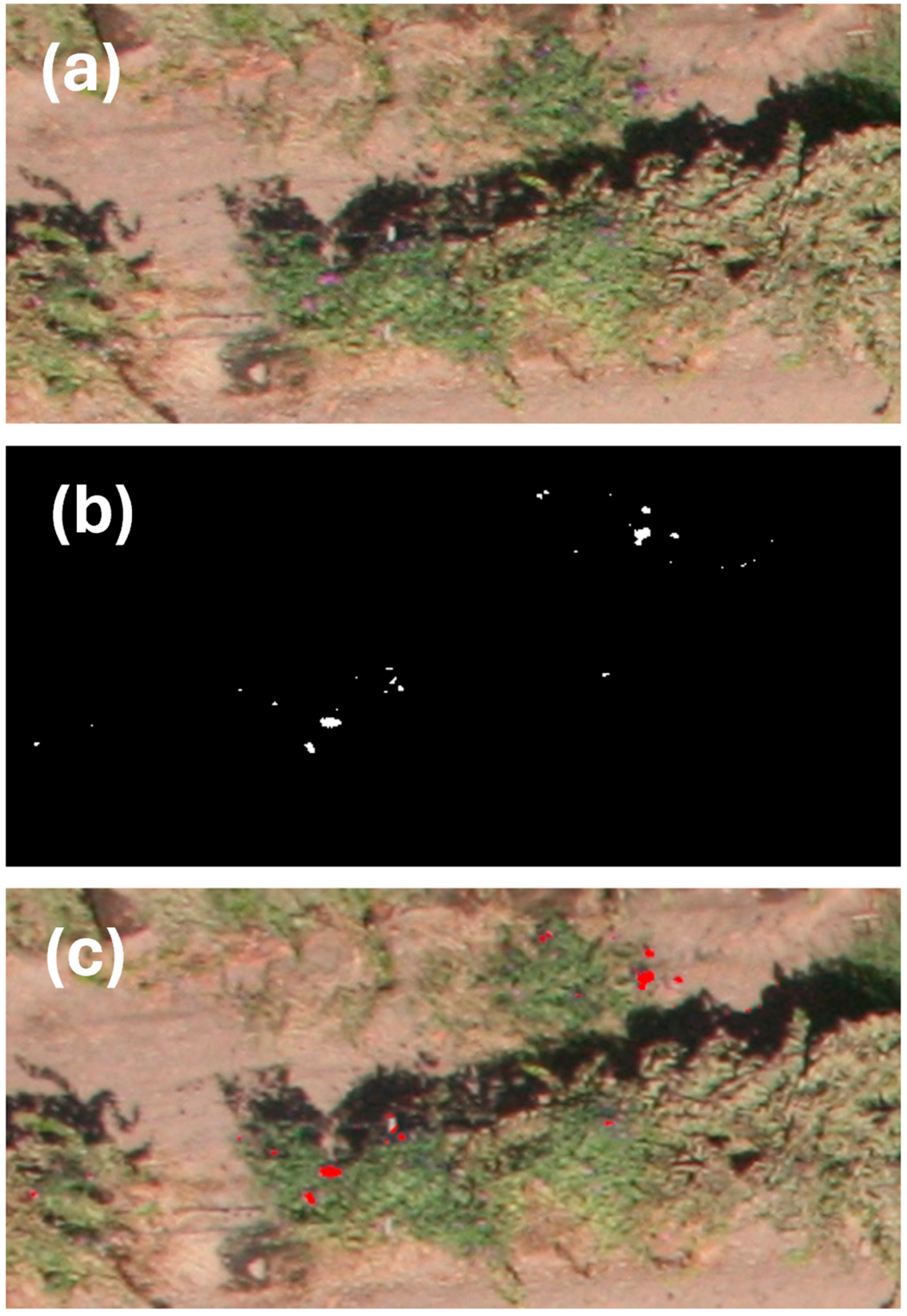
2.3.3. Gaussian Clustering and Segmentation
2.3.4. Counting I. purpurea Flowers
| Algorithm 1: I. purpurea Flower Counter |
| Input: Segmented binary flower mask of the high-altitude UAS image. Output: Total number of I. purpurea flowers in the image. Step 1: Initialize Total_Flower_Count = 0; Step 2: Load the flower mask of the high-altitude UAS image; Step 3: Prompt the user to select altitude; Step 4: Determine minimum and maximum pixel count thresholds based on altitude; Step 5: Apply Connected Component Analysis on the binary flower mask; Step 6: for Each connected component in the mask do 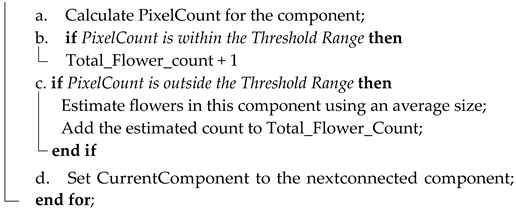 Step 7: Return Total_Flower_Count as the total number of I. purpurea flowers in the image; Step 8: End. |
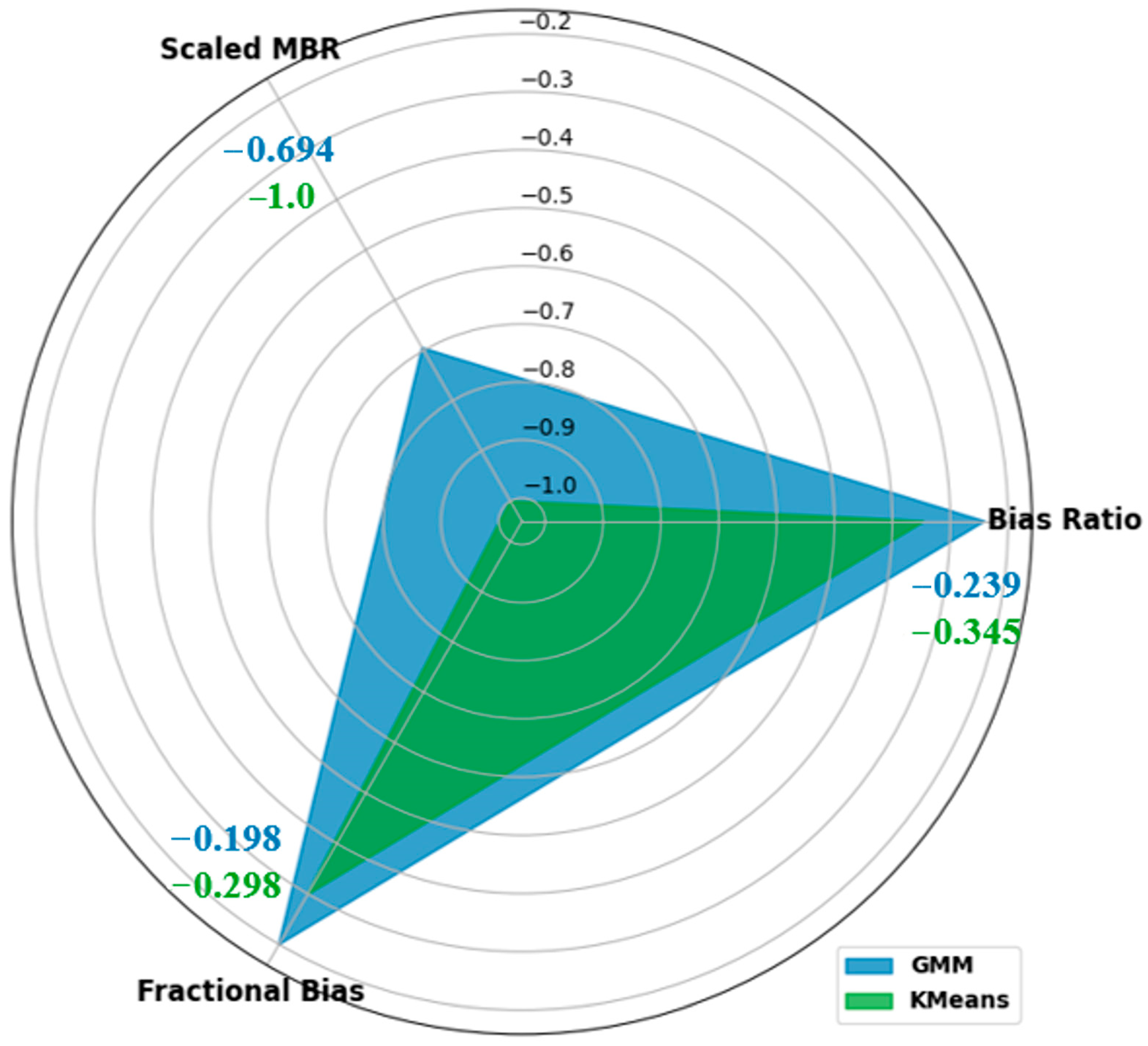
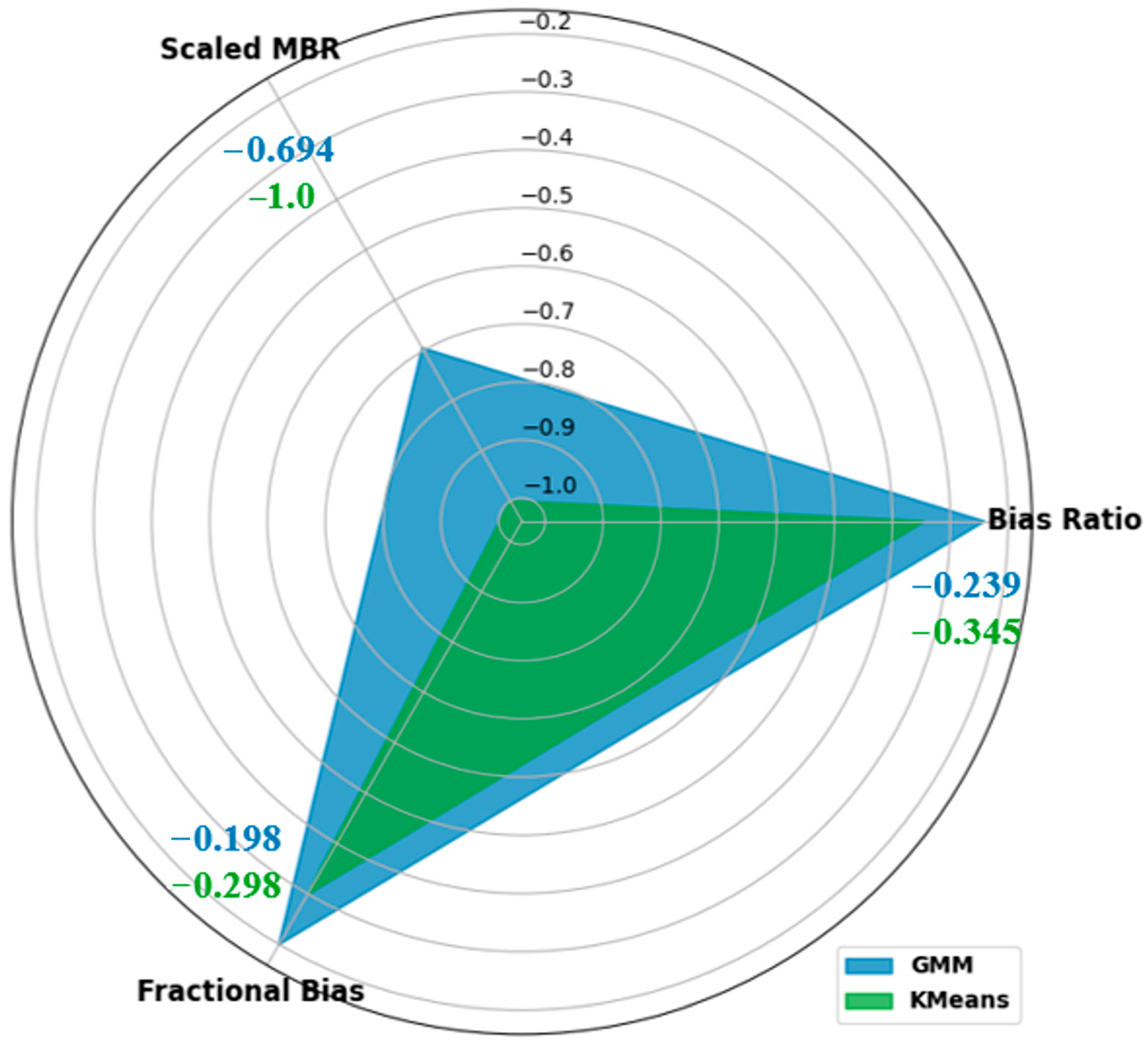
2.4. Evaluation of the Gaussian Mixture Model (GMM)
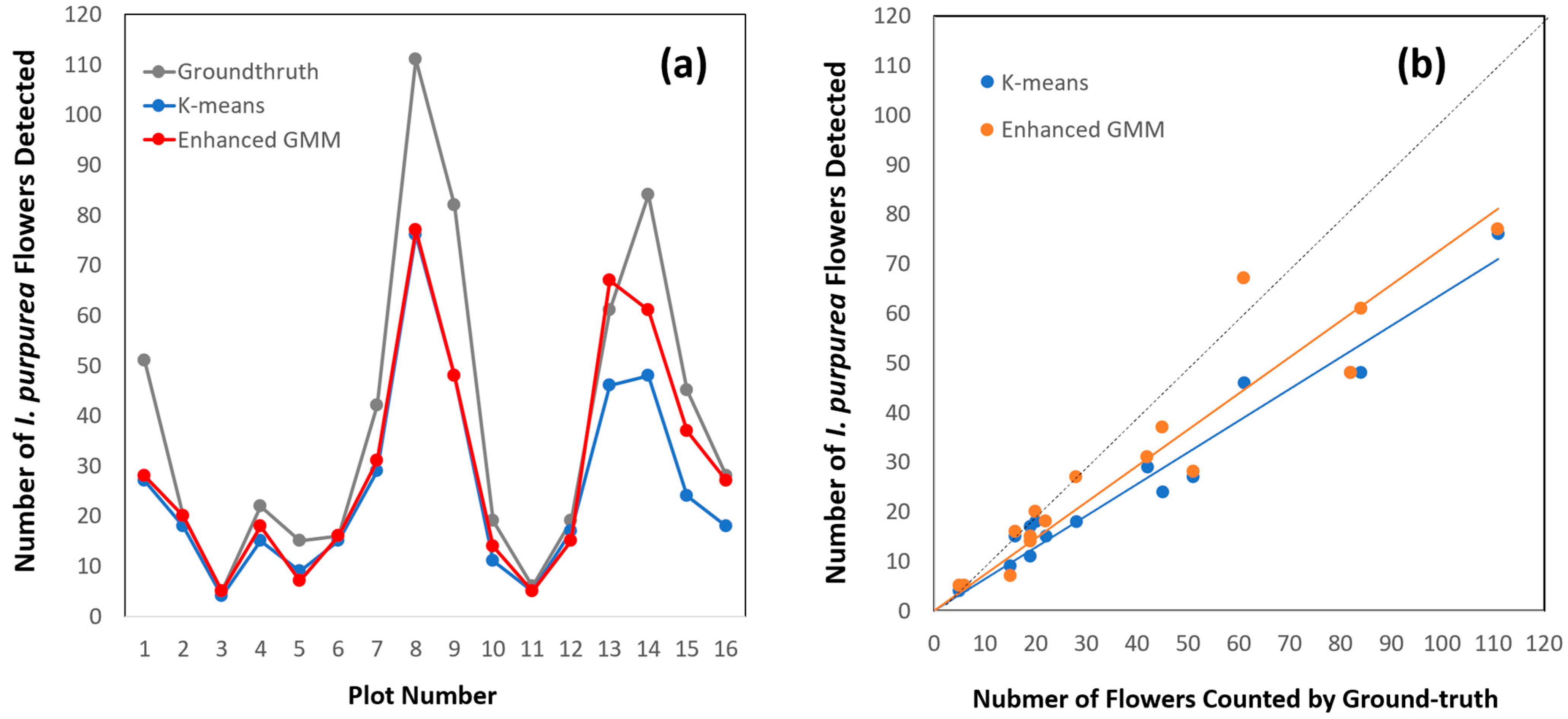
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Bhullar, M.S.; Walia, U.; Singh, S.; Singh, M.; Jhala, A.J. Control of morningglories (Ipomoea spp.) in sugarcane (Saccharum spp.). Weed Technol. 2012, 26, 77–82. [Google Scholar] [CrossRef]
- Singh, M.; Ramirez, A.H.; Sharma, S.D.; Jhala, A.J. Factors affecting the germination of tall morningglory (Ipomoea purpurea). Weed Sci. 2012, 60, 64–68. [Google Scholar] [CrossRef]
- Bryson, C.T.; DeFelice, M.S. Weeds of the Midwestern United States and Central Canada; University of Georgia Press: Athens, GA, USA, 2010. [Google Scholar]
- Jones, E.A.; Contreras, D.J.; Everman, W.J. Ipomoea hederacea, Ipomoea lacunosa, and Ipomoea purpurea. In Biology and Management of Problematic Crop Weed Species; Elsevier: Amsterdam, The Netherlands, 2021; pp. 241–259. [Google Scholar]
- Price, A.J.; Williams, J.P.; Duzy, L.A.; McElroy, J.S.; Guertal, E.A.; Li, S. Effects of integrated polyethylene and cover crop mulch, conservation tillage, and herbicide application on weed control, yield, and economic returns in watermelon. Weed Technol. 2018, 32, 623–632. [Google Scholar] [CrossRef]
- Cox, H.R. The Eradication of Bindweed, or Wild Morning-Glory; U.S. Department of Agriculture: Washington, DC, USA, 1909.
- Culpepper, A.S. Glyphosate-induced weed shifts. Weed Technol. 2006, 20, 277–281. [Google Scholar] [CrossRef]
- Webster, T.M.; Nichols, R.L. Changes in the prevalence of weed species in the major agronomic crops of the Southern United States: 1994/1995 to 2008/2009. Weed Sci. 2012, 60, 145–157. [Google Scholar] [CrossRef]
- Wistrom, C.; Purcell, A. The fate of Xylella fastidiosa in vineyard weeds and other alternate hosts in California. Plant Dis. 2005, 89, 994–999. [Google Scholar] [CrossRef] [PubMed]
- Lider, L.; Leonard, O. Morning glory control in vineyards with two new soil-residual herbicides: Dichlobenil and chlorthiamid. Calif. Agric. 1968, 22, 8–10. [Google Scholar]
- Park, Y.-L.; Krell, R.K.; Carroll, M. Theory, technology, and practice of site-specific insect pest management. J. Asia-Pac. Entomol. 2007, 10, 89–101. [Google Scholar] [CrossRef]
- Park, Y.-L.; Krell, R.K. Generation of prescription maps for curative and preventative site-specific management of bean leaf beetles (Coleoptera: Chrysomelidae). J. Asia-Pac. Entomol. 2005, 8, 375–380. [Google Scholar] [CrossRef]
- Hung, C.; Xu, Z.; Sukkarieh, S. Feature learning based approach for weed classification using high resolution aerial images from a digital camera mounted on a UAV. Remote Sens. 2014, 6, 12037–12054. [Google Scholar] [CrossRef]
- Schmale Iii, D.G.; Dingus, B.R.; Reinholtz, C. Development and application of an autonomous unmanned aerial vehicle for precise aerobiological sampling above agricultural fields. J. Field Robot. 2008, 25, 133–147. [Google Scholar] [CrossRef]
- Zhang, C.; Kovacs, J.M. The application of small unmanned aerial systems for precision agriculture: A review. Precis. Agric. 2012, 13, 693–712. [Google Scholar] [CrossRef]
- Garcia-Ruiz, F.; Sankaran, S.; Maja, J.M.; Lee, W.S.; Rasmussen, J.; Ehsani, R. Comparison of two aerial imaging platform for identification of Huanglongbing-infected citrus trees. Comput. Electron. Agric. 2013, 91, 106–115. [Google Scholar] [CrossRef]
- Rajeena, P.F.; Ismail, W.N.; Ali, M.A. A metaheuristic harris hawks optimization algorithm for weed detection using drone images. Appl. Sci. 2023, 13, 7083. [Google Scholar]
- Stephen, S.; Kumar, V. Detection and analysis of weed impact on sugar beet crop using drone imagery. J. Indian Soc. Remote Sens. 2023, 51, 2577–2597. [Google Scholar] [CrossRef]
- Castellano, G.; De Marinis, P.; Vessio, G. Weed mapping in multispectral drone imagery using lightweight vision transformers. Neurocomputing 2023, 562, 126914. [Google Scholar] [CrossRef]
- Xiang, H.; Tian, L. Development of a low-cost agricultural remote sensing system based on an autonomous unmanned aerial vehicle (UAV). Biosyst. Eng. 2011, 108, 174–190. [Google Scholar] [CrossRef]
- Mahony, R.; Kumar, V.; Corke, P. Multirotor aerial vehicles: Modeling, estimation, and control of quadrotor. IEEE Robot. Autom. Mag. 2012, 19, 20–32. [Google Scholar] [CrossRef]
- Rasmussen, J.; Nielsen, J.; Garcia-Ruiz, F.; Christensen, S.; Streibig, J. Potential uses of small unmanned aircraft systems (UAS) in weed research. Weed Res. 2013, 53, 242–248. [Google Scholar] [CrossRef]
- Torres-Sánchez, J.; López-Granados, F.; De Castro, A.I.; Peña-Barragán, J.M. Configuration and specifications of an unmanned aerial vehicle (UAV) for early site specific weed management. PLoS ONE 2013, 8, e58210. [Google Scholar] [CrossRef]
- Hameed, S.; Amin, I. Detection of weed and wheat using image processing. In Proceedings of the 2018 IEEE 5th International Conference on Engineering Technologies and Applied Sciences (ICETAS), Bangkok, Thailand, 22–23 November 2018; pp. 1–5. [Google Scholar]
- Hunter III, J.E.; Gannon, T.W.; Richardson, R.J.; Yelverton, F.H.; Leon, R.G. Integration of remote-weed mapping and an autonomous spraying unmanned aerial vehicle for site-specific weed management. Pest Manag. Sci. 2020, 76, 1386–1392. [Google Scholar] [CrossRef]
- Sapkota, R.; Stenger, J.; Ostlie, M.; Flores, P. Site-specific weed management in corn using UAS imagery analysis and computer vision techniques. arXiv 2022, arXiv:2301.07519. [Google Scholar]
- Shahi, T.B.; Dahal, S.; Sitaula, C.; Neupane, A.; Guo, W. Deep Learning-Based Weed Detection Using UAV Images: A Comparative Study. Drones 2023, 7, 624. [Google Scholar] [CrossRef]
- Trivedi, V.K.; Shukla, P.K.; Dutta, P.K. K-mean and HSV model based segmentation of unhealthy plant leaves and classification using machine learning approach. In Proceedings of the 3rd IET International Smart Cities Symposium, 3SCS-2020, Manama, Bahrain, 21–23 September 2020. [Google Scholar]
- Alomar, K.; Aysel, H.I.; Cai, X. Data augmentation in classification and segmentation: A survey and new strategies. J. Imaging 2023, 9, 46. [Google Scholar] [CrossRef] [PubMed]
- Dempster, A.P.; Laird, N.M.; Rubin, D.B. Maximum likelihood from incomplete data via the EM algorithm. J. R. Stat. Soc. Ser. B 1977, 39, 1–22. [Google Scholar] [CrossRef]
- Leon-Garcia, A. Probability and Random Processes for Electrical Engineering; Pearson Education Inc.: Upper Saddle River, NJ, USA, 2008. [Google Scholar]
- Singh, V.; Rana, A.; Bishop, M.; Filippi, A.M.; Cope, D.; Rajan, N.; Bagavathiannan, M. Unmanned aircraft systems for precision weed detection and management: Prospects and challenges. Adv. Agron. 2020, 159, 93–134. [Google Scholar]
- Mulla, D.J. Twenty five years of remote sensing in precision agriculture: Key advances and remaining knowledge gaps. Biosyst. Eng. 2013, 114, 358–371. [Google Scholar] [CrossRef]
- González-Jorge, H.; Martínez-Sánchez, J.; Bueno, M.; Arias, P. Unmanned aerial systems for civil applications: A review. Drones 2017, 1, 2–19. [Google Scholar] [CrossRef]
- Daponte, P.; De Vito, L.; Glielmo, L.; Iannelli, L.; Liuzza, D.; Picariello, F.; Silano, G. A review on the use of drones for precision agriculture. IOP Conf. Ser. Earth Environ. Sci. 2019, 275, 012022. [Google Scholar] [CrossRef]
- Park, Y.L.; Naharki, K.; Karimzadeh, R.; Seo, B.Y.; Lee, G.S. Rapid assessment of insect pest outbreak using drones: A case study with Spodoptera exigua (Hübner) (Lepidoptera: Noctuidae) in soybean fields. Insects 2023, 14, 555. [Google Scholar] [CrossRef]
- Naharki, K.; Huebner, C.D.; Park, Y.L. The detection of tree of heaven (Ailanthus altissima) using drones and optical sensors: Implications for the management of invasive plants and insects. Drones 2024, 8, 1. [Google Scholar] [CrossRef]
- Park, Y.L.; Gururajan, S.; Thistle, H.; Chandran, R.; Reardon, R. Aerial release of Rhinoncomimus latipes (Coleoptera: Curculionidae) to control Persicaria perfoliata (Polygonaceae) using an unmanned aerial system. Pest Manag. Sci. 2018, 74, 141–148. [Google Scholar] [CrossRef]
- Kim, J.; Huebner, C.D.; Reardon, R.; Park, Y.L. Spatially targeted biological control of mile-a-minute weed using Rhinoncomimus latipes (Coleoptera: Curculionidae) and an unmanned aircraft system. J. Econ. Entomol. 2021, 114, 1889–1895. [Google Scholar] [CrossRef]
- Garre, P.; Harish, A. Autonomous agricultural pesticide spraying uav. IOP Conf. Ser. Mater. Sci. Eng. 2018, 455, 012030. [Google Scholar] [CrossRef]
- Bhattarai, U.; Karkee, M. A weakly-supervised approach for flower/fruit counting in apple orchards. Comput. Ind. 2022, 138, 103635. [Google Scholar] [CrossRef]
- Palacios, F.; Bueno, G.; Salido, J.; Diago, M.P.; Hernández, I.; Tardaguila, J. Automated grapevine flower detection and quantification method based on computer vision and deep learning from on-the-go imaging using a mobile sensing platform under field conditions. Comput. Electron. Agric. 2020, 178, 105796. [Google Scholar] [CrossRef]
- Rahnemoonfar, M.; Sheppard, C. Deep count: Fruit counting based on deep simulated learning. Sensors 2017, 17, 905. [Google Scholar] [CrossRef] [PubMed]
- Dias, P.A.; Tabb, A.; Medeiros, H. Multispecies fruit flower detection using a refined semantic segmentation network. IEEE Robot. Autom. Lett. 2018, 3, 3003–3010. [Google Scholar] [CrossRef]
- Zhao, P.; Shin, B.C. Counting of flowers based on k-means clustering and watershed segmentation. J. Korean Soc. Ind. Appl. Math. 2023, 27, 146–159. [Google Scholar]
- Proïa, F.; Pernet, A.; Thouroude, T.; Michel, G.; Clotault, J. On the characterization of flowering curves using Gaussian mixture models. J. Theor. Biol. 2016, 402, 75–88. [Google Scholar] [CrossRef] [PubMed]
- MMSegmentation. Openmmlab Semantic Segmentation Toolbox and Benchmark. Available online: https://github.com/open-mmlab/mmsegmentation (accessed on 11 February 2024).
- Li, J.; Wang, E.; Qiao, J.; Li, Y.; Li, L.; Yao, J.; Liao, G. Automatic rape flower cluster counting method based on low-cost labelling and UAV-RGB images. Plant Methods 2023, 19, 40. [Google Scholar] [CrossRef] [PubMed]
- Guo, Z.; Yao, J.; Jiang, Y.; Zhu, X.; Tan, Z.; Wen, W. A novel distributed unit transient protection algorithm using support vector machines. Electr. Power Syst. Res. 2015, 123, 13–20. [Google Scholar] [CrossRef]
- Huang, Y.; Reddy, K.N.; Fletcher, R.S.; Pennington, D. UAV low-altitude remote sensing for precision weed management. Weed Technol. 2018, 32, 2–6. [Google Scholar] [CrossRef]
- You, Z.; Yang, K.; Luo, W.; Lu, X.; Cui, L.; Le, X. Few-shot object counting with similarity-aware feature enhancement. In Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision, Waikoloa, HI, USA, 3–7 January 2023; pp. 6315–6324. [Google Scholar]
- Xu, J.; Le, H.; Nguyen, V.; Ranjan, V.; Samaras, D. Zero-Shot Object Counting. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Vancouver, BC, Canada, 17–24 June 2023; pp. 15548–15557. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Aircraft Parameters | Values |
|---|---|
| Wing span | 1.68 m |
| Root chord | 0.483 m |
| Tip chord | 0.203 m |
| Weight | 4.58 kg |
| Takeoff weight with payload | ~6.12 kg |
| Average cruise airspeed | 13.3 m/s |
| Turning radius | 5.03 m |
| Payload capacity | ~1.36 kg |
| Fuselage length | 1.80 m |
| Engine type | GMS 0.76 2-Stroke Glow Engine |
| Engine horsepower | 1.9 |
| Propeller | Two blades (12 inches by 6 inches) |
| RPM range | 2000–13,000 |
| Flight duration | ~10 min |
| Fuel type | Glow fuel at 15% Nitro |
| Fuel tank capacity | 16 oz. |
| Item or Setting | Specification |
|---|---|
| Camera type | Digital AF/AE SLR with built-in flash |
| Recording media | CompactFlash (CF) Card Types I and II |
| Image format | 22.2 × 14.8 mm (APS-C-size sensor) |
| Pixels | Approx. 10.10 megapixels |
| Aspect ratio | 3:2 (horizontal:vertical) |
| Color filter system | RGB primary color filters |
| Low-pass filter | Fixed position in front of the CMOS sensor |
| Image format | JPEG, RAW (Canon .CR2) |
| Auto white balance | Auto white balance with the image sensor |
| Color temperature compensation | White balance bracketing: +/− stops in 1-stop increments. White balance correction: blue/amber bias +/− 9 levels, magenta/green bias ± 9 levels |
| Autofocus | TTL-CT-SIR with a CMOS sensor, 9 AF points, EV −0.5–18 (ISO 100 at 23 °C) |
| Shutter speeds | Speed of 1/4000 to 30 s. (1/3- and 1/2-stop increments), X-sync at 1/200 s. |
| Remote control | Remote control with Remote Switch RS-60E3 or Wireless Remote Controllers RC-1/RC-5 |
| Drive modes | Single, continuous, self-timer/remote control |
| Continuous shooting speed | Approx. 3 fps (at a shutter speed of 1/250 s or faster) |
| Maximum burst | JPEG: ca. 27 frames (Large/Fine) |
| Dimensions (W × H × D) | 126.5 × 94.2 × 65 mm |
| Weight | 510 g (body only) |
| Lens: angle of view | For EF-S, 18–55 mm f/3.5–5.6 II; diagonal extent: 74°20′–27°50′; horizontal extent: 64°30′–23°20′; vertical extent: 45°30′–15°40′ |
| Minimum aperture | f/22–36 |
| Closest focusing distance | Distance of 0.28 m from the image sensor plane |
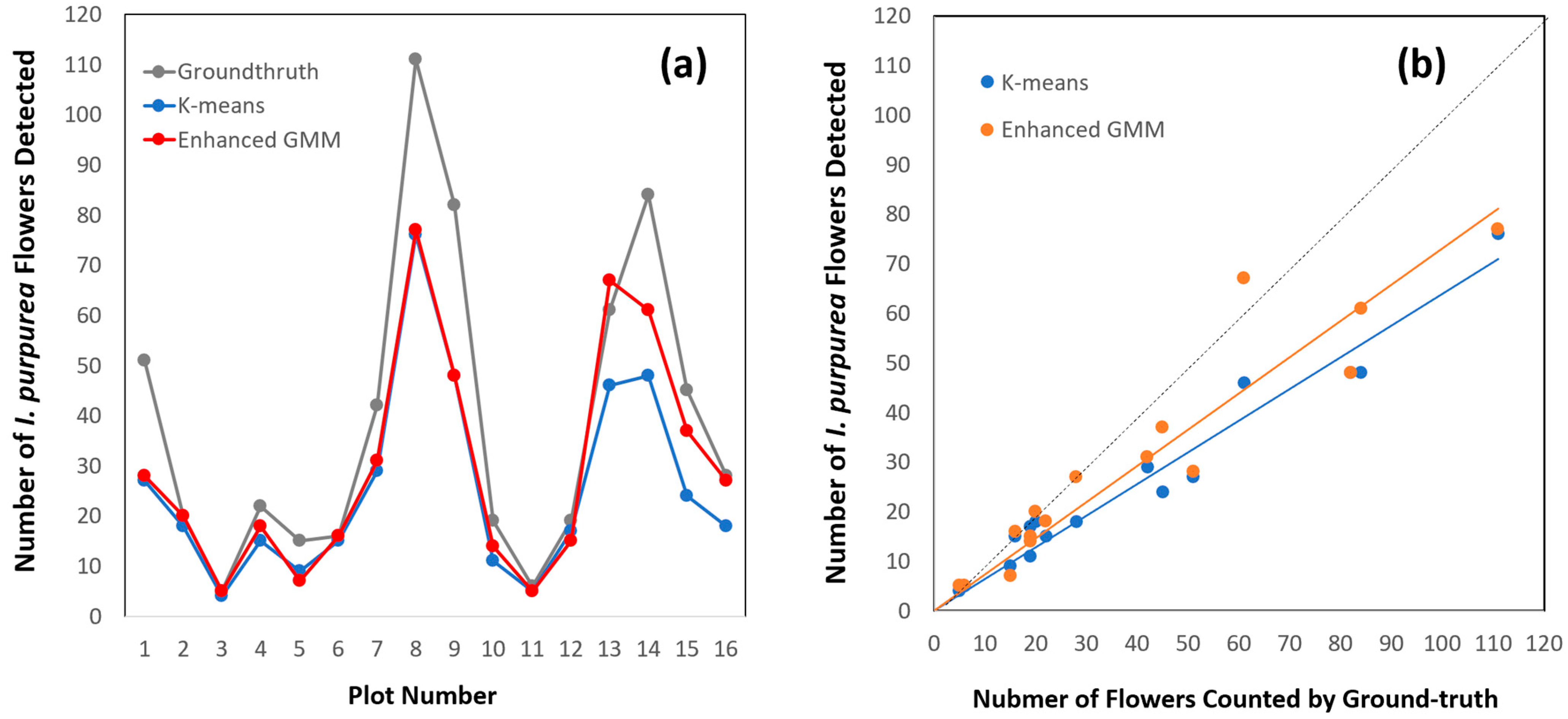
| Plot | Number of I. purpurea Flowers Detected | ||
|---|---|---|---|
| Ground-Truth | K-Means | Enhanced GMM | |
| 1 | 51 | 27 | 28 |
| 2 | 20 | 18 | 20 |
| 3 | 5 | 4 | 5 |
| 4 | 22 | 15 | 18 |
| 5 | 15 | 9 | 7 |
| 6 | 16 | 15 | 16 |
| 7 | 42 | 29 | 31 |
| 8 | 111 | 76 | 77 |
| 9 | 82 | 48 | 48 |
| 10 | 19 | 11 | 14 |
| 11 | 6 | 5 | 5 |
| 12 | 19 | 17 | 15 |
| 13 | 61 | 46 | 67 |
| 14 | 84 | 48 | 61 |
| 15 | 45 | 24 | 37 |
| 16 | 28 | 18 | 27 |
| Image Analysis Method | RMSE | MAE | Max Error |
|---|---|---|---|
| K-means clustering | 17.73 | 12.7 | 36 |
| Our GMM | 14.78 | 9.52 | 34 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Valicharla, S.K.; Wang, J.; Li, X.; Gururajan, S.; Karimzadeh, R.; Park, Y.-L. Morning Glory Flower Detection in Aerial Images Using Semi-Supervised Segmentation with Gaussian Mixture Models. AgriEngineering 2024, 6, 555-573. https://doi.org/10.3390/agriengineering6010034
Valicharla SK, Wang J, Li X, Gururajan S, Karimzadeh R, Park Y-L. Morning Glory Flower Detection in Aerial Images Using Semi-Supervised Segmentation with Gaussian Mixture Models. AgriEngineering. 2024; 6(1):555-573. https://doi.org/10.3390/agriengineering6010034
Chicago/Turabian StyleValicharla, Sruthi Keerthi, Jinge Wang, Xin Li, Srikanth Gururajan, Roghaiyeh Karimzadeh, and Yong-Lak Park. 2024. "Morning Glory Flower Detection in Aerial Images Using Semi-Supervised Segmentation with Gaussian Mixture Models" AgriEngineering 6, no. 1: 555-573. https://doi.org/10.3390/agriengineering6010034
APA StyleValicharla, S. K., Wang, J., Li, X., Gururajan, S., Karimzadeh, R., & Park, Y.-L. (2024). Morning Glory Flower Detection in Aerial Images Using Semi-Supervised Segmentation with Gaussian Mixture Models. AgriEngineering, 6(1), 555-573. https://doi.org/10.3390/agriengineering6010034