
Development of a Wireless System to Control a Trombe Wall for Poultry Brooding




Abstract
1. Introduction
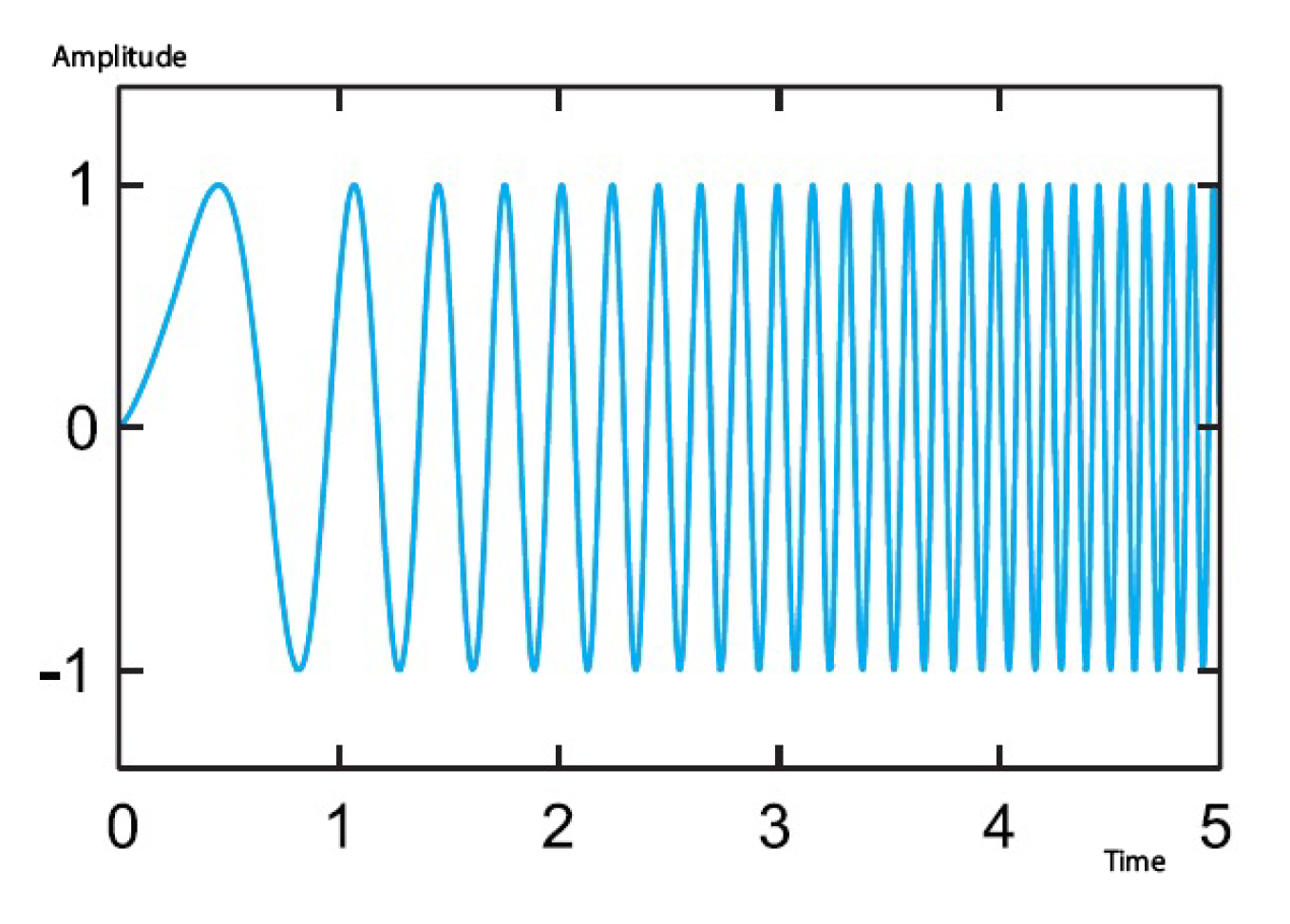
1.1. LoRa
1.2. LoRaWAN
- To lower data rates (SF10, SF11 and SF12 using 125 KHz), the maximum packet size is 51 bytes.
- To medium data rates (SF9 using 125 KHz), the maximum packet size is 225 bytes.
- To higher data rates (SF7 and SF8 using 125 KHz), the maximum packet size is 222 bytes.
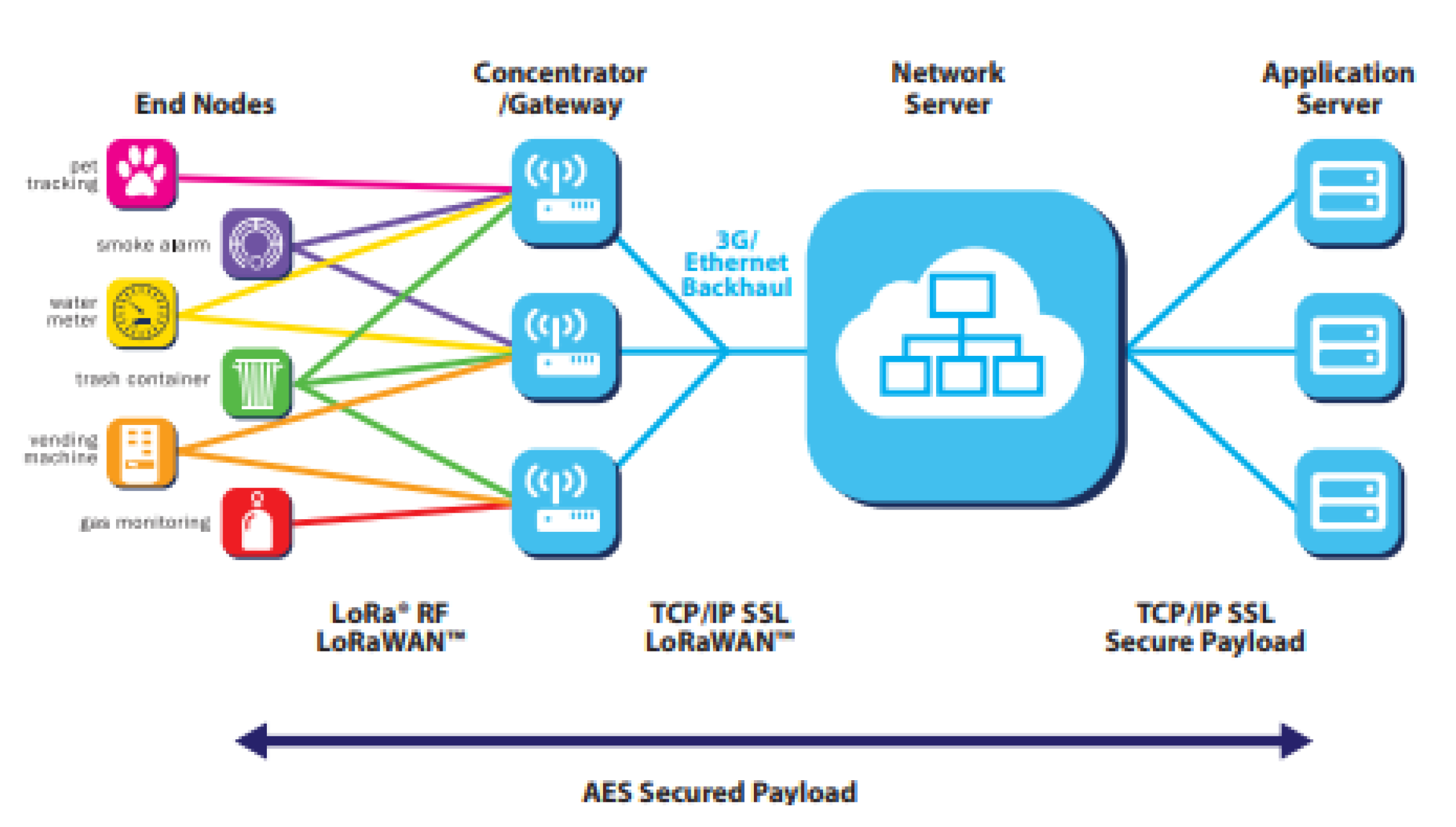
- End-node: an end-node consists of a radio module and an antenna to receive/transmit data in a binary format, along with a microprocessor to process them [23]. There are three types of end-nodes [12]:
- − Class A: devices that when send a message to the server open two windows in order to receive a possible response (each window is approximately 20 s [24]). These are the most efficient on an energy level.
- − Class B: are what class A decides; however, these also open receiving windows that can be scheduled by the user.
- − Class C: these devices are always waiting for a response, unless they are transmitting; therefore, they are less efficient on an energy level.
- Gateway: This section works as a translator between the two network topology used. A gateway consists of a radio module and an antenna to receive/transmit data in a binary format, along with a microprocessor to process them, similar to an end-node [23]. However, these are designed to receive data from end-nodes in order to send them to a server in the Internet using another protocol (Ethernet, 3G or WiFi) and vice versa. From the same end-node, more than one gateway can receive the data. According to the literature, one only gateway can receive data from more than one end-node at different frequencies simultaneously [25].
- Server: There are a lot of servers that are willing to cooperate with LoRaWAN (LORIOT, ChirpStack and The Things Network). In this work, it is used The Things Network (TTN) that is an open-source infrastructure developed specifically to be an interface between LoRa devices and the application layer, endowed with robust encryption making it safe to use Internet of Things functions [26].
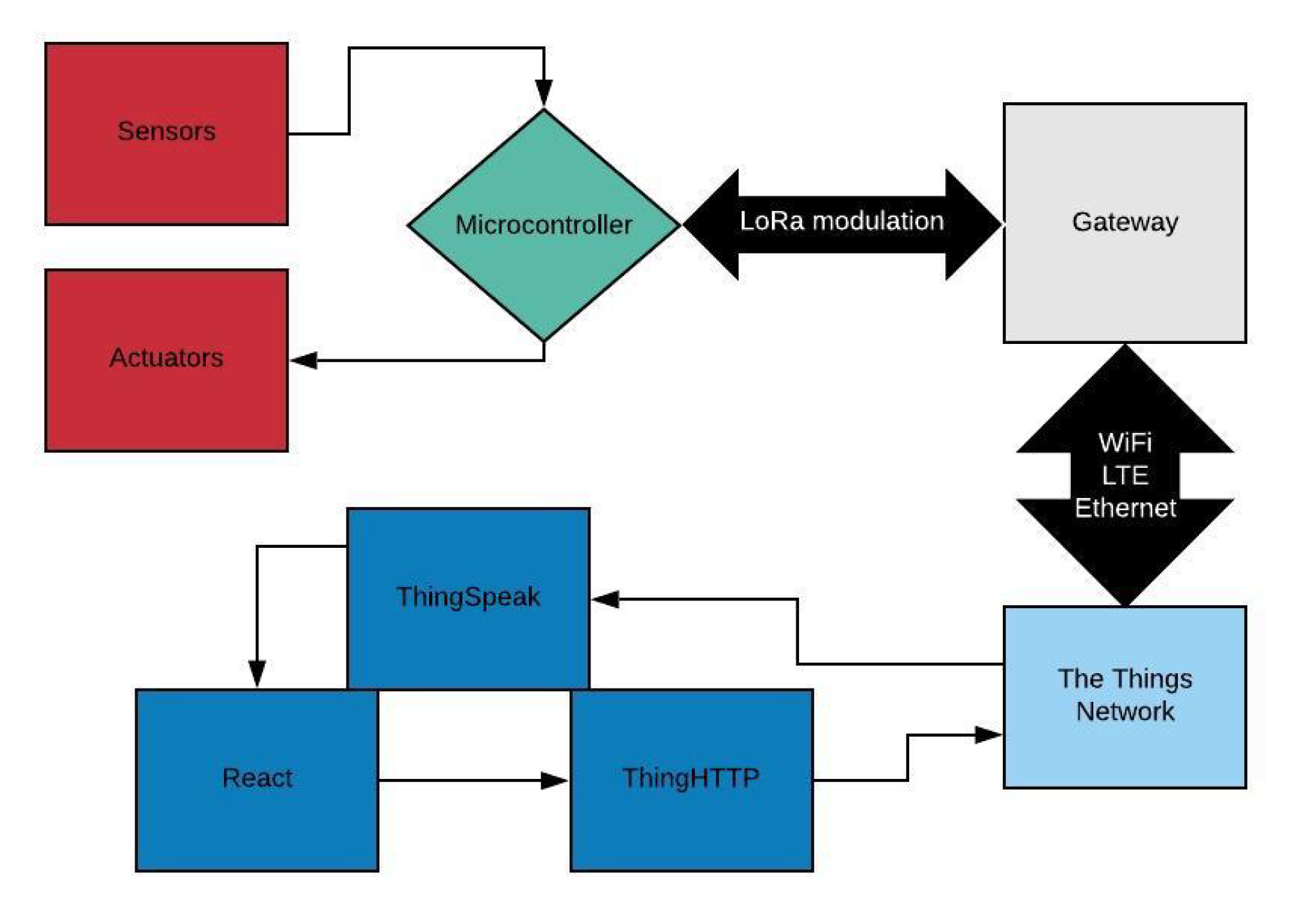
- Application: As servers, there are a lot of applications ready to be connected to a LoRaWAN network. In this case and as it fits the purpose, it is used the ThingSpeak integration and its applications React and ThingHTTP, that combined respond to a particular situation.
2. Materials and Methods
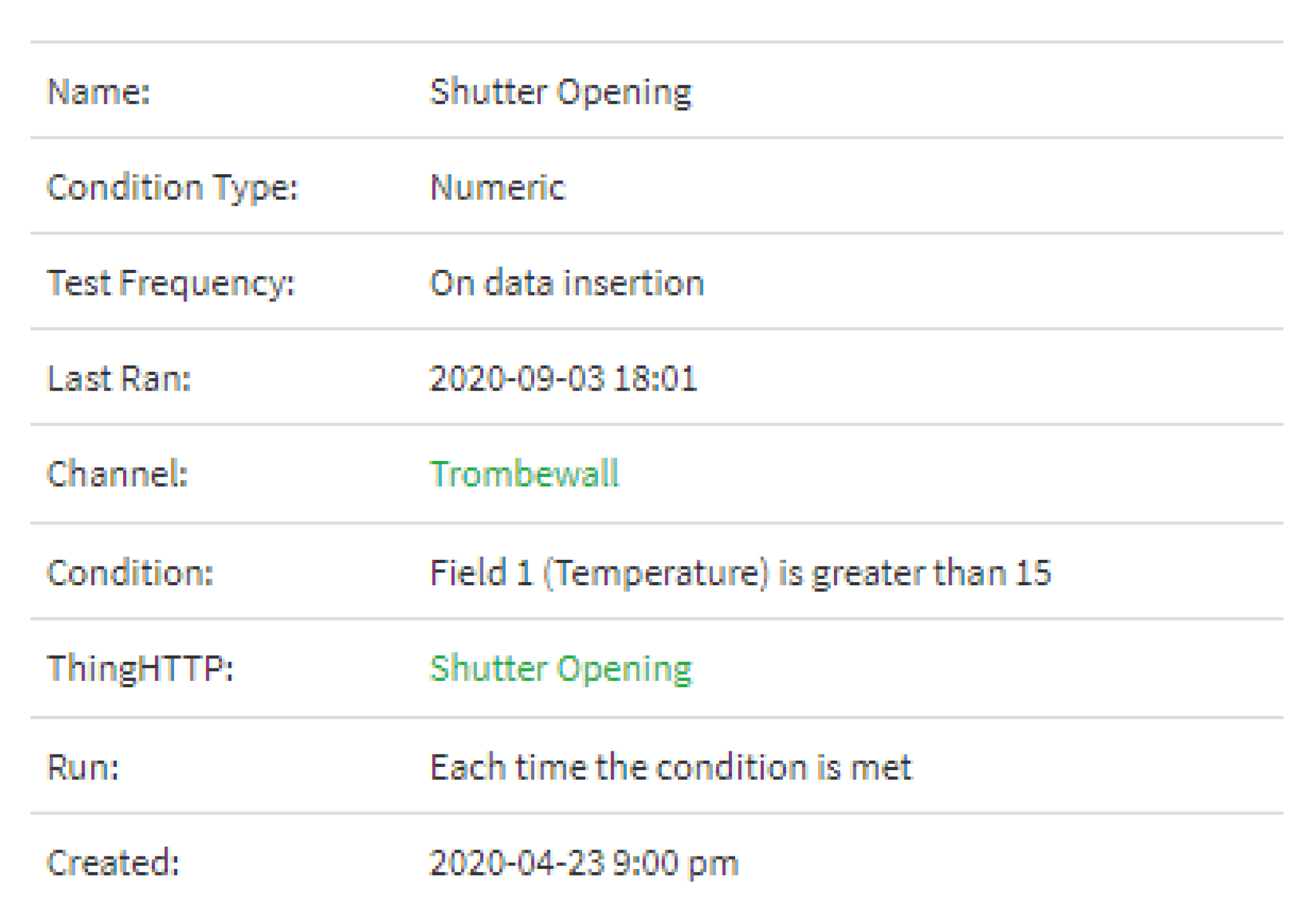
- React: It has the purpose of making a reaction to a predefined event in an attributed graph. In this specific situation, the required value is compared with the one that was received, and if it is equal, higher or lower, an action is taken. In the ThingSpeak, a React can be created and its specific characteristics can be defined [27].
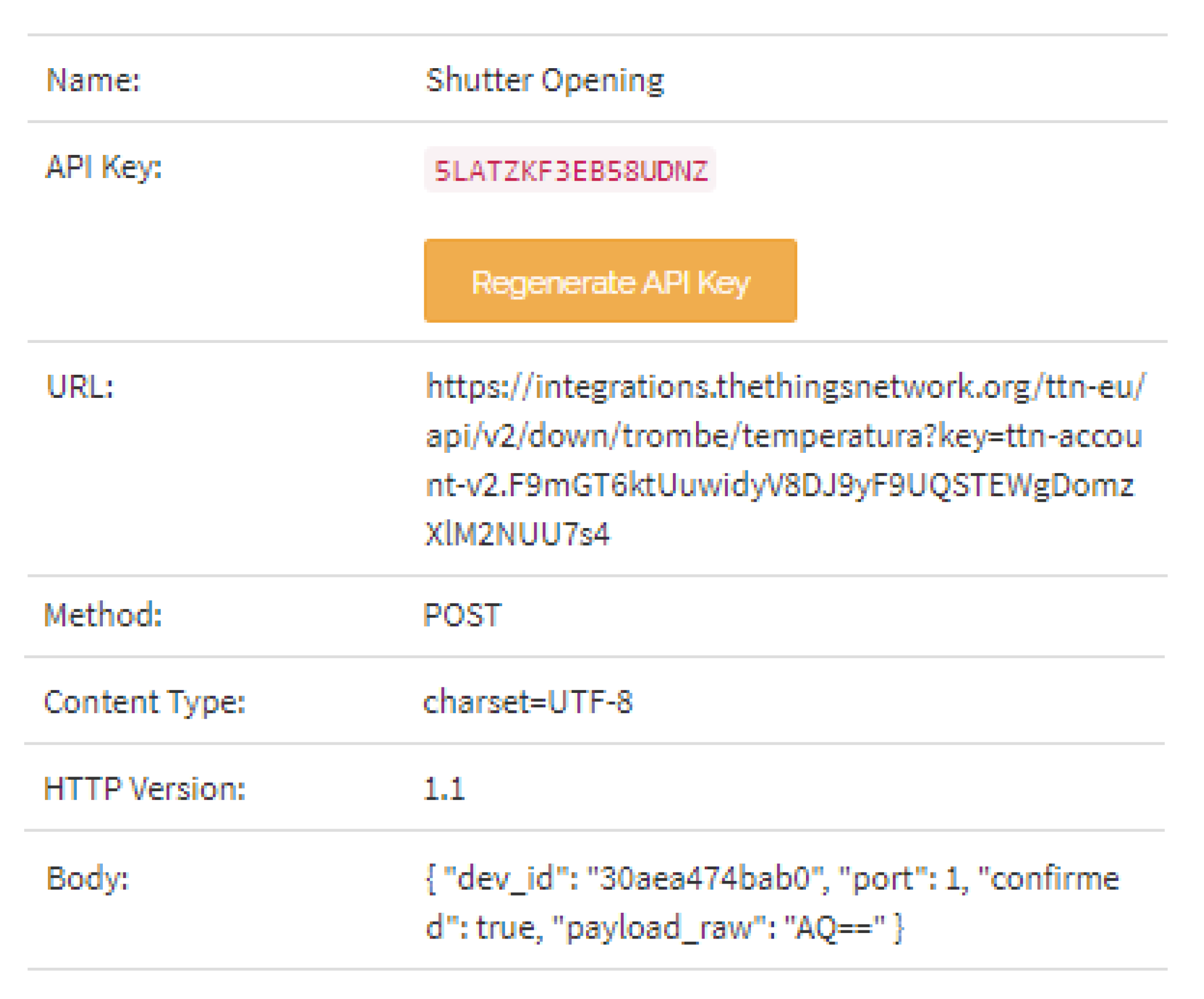
- ThingHTTP: It is an application that allows the connection to a web service using the HTTP protocol throughout a network. It can use the normal requesting methods such as GET, POST, PUT and DELETE [33]. It can be integrated with React, creating a new requisition, assigning a downlink URL from the TTN that automatically redirects the information declared to the microcontroller. This information must have a JSON format and an adequate syntax in order to be interpreted by the TTN [28].
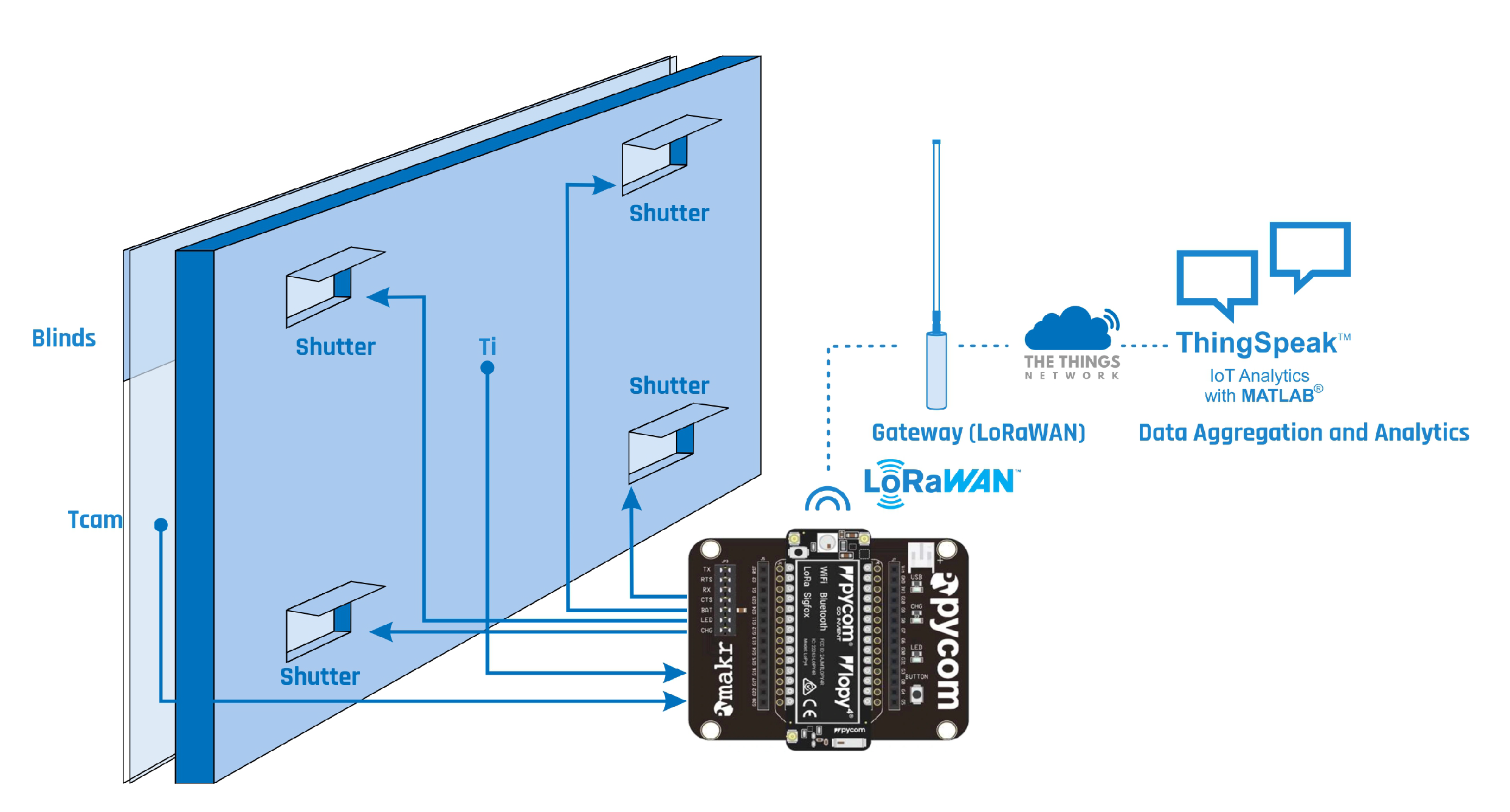
2.1. Prototype
2.1.1. Connection to The Things Network
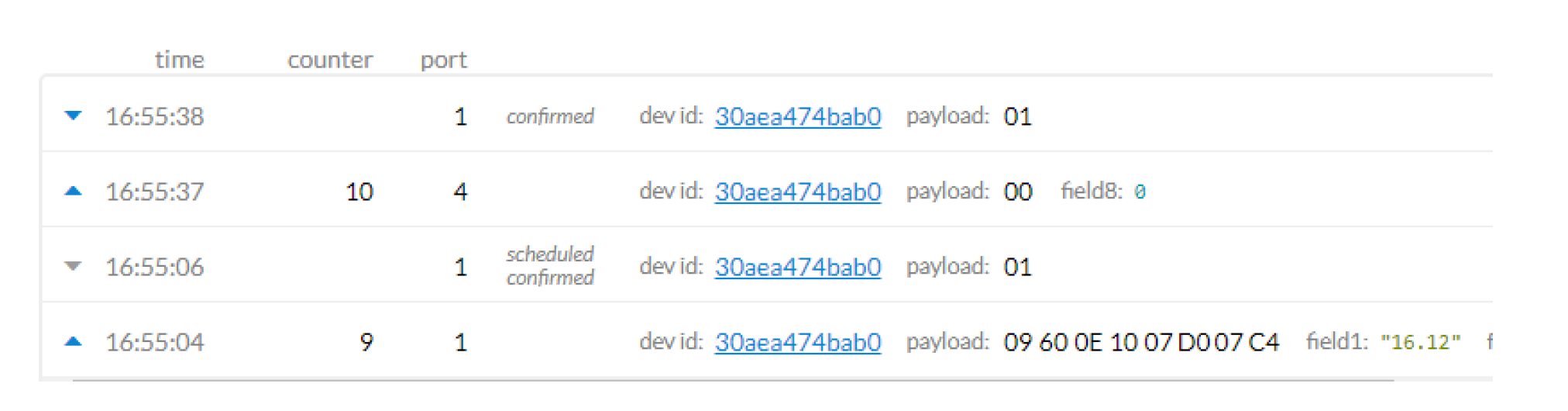
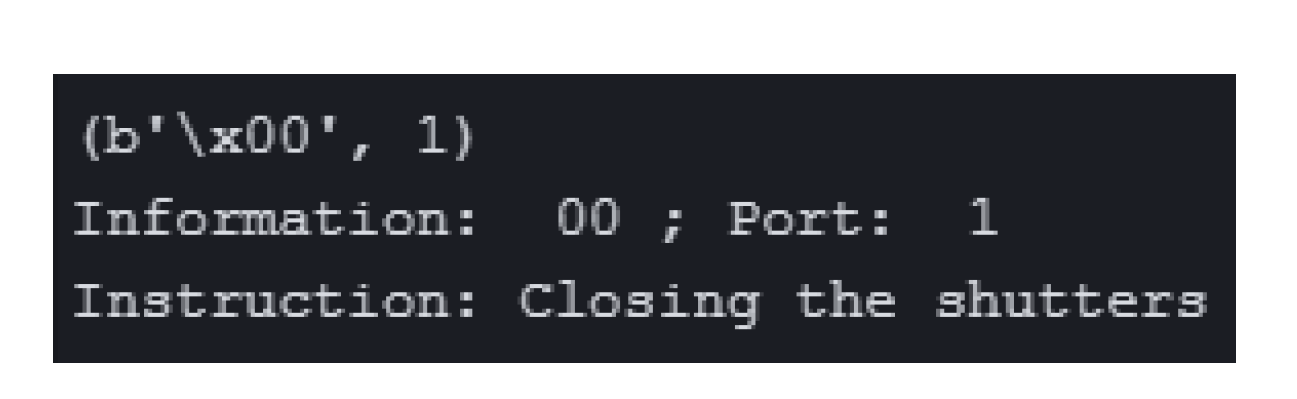
2.1.2. Treating, Sending and Receiving Data
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Nwakonobi, T.; Obetta, S.; Gabi, M. Evaluation of a Modified Passive Solar Housing System for Poultry Brooding. J. Sci. Technol. (Ghana) 2013, 33, 50. [Google Scholar] [CrossRef][Green Version]
- Okonkwo, W.I.; Akubuo, C.O. Design, Construction and Performance Evaluation of a Trombe Wall Poultry Chick Brooding House. In Proceedings of the ASABE Annual International Meeting, Detroit, MI, USA, 29 July–1 August 2018; American Society of Agricultural and Biological Engineers: St. Joseph, MI, USA, 2018. [Google Scholar] [CrossRef]
- Okonkwo, W.I.; Akubuo, C.O. Trombe wall system for poultry brooding. Int. J. Poult. Sci. 2007, 6, 125–130. [Google Scholar] [CrossRef]
- Ahmed, O.K. Recent Advances in Photovoltaic-Trombe Wall System: A Review. In Renewable Energy [Working Title]; IntechOpen: London, UK, 2020. [Google Scholar] [CrossRef][Green Version]
- Briga-Sá, A.; Boaventura-Cunha, J.; Lanzinha, J.C.; Paiva, A. Experimental and analytical approach on the Trombe wall thermal performance parameters characterization. Energy Build. 2017, 150, 262–280. [Google Scholar] [CrossRef]
- Sá, A.B.; Boaventura-Cunha, J.; Lanzinha, J.C.; Paiva, A. An experimental analysis of the Trombe wall temperature fluctuations for high range climate conditions: Influence of ventilation openings and shading devices. Energy Build. 2017, 138, 546–558. [Google Scholar] [CrossRef]
- Briga-Sá, A.; Paiva, A.; Lanzinha, J.C.; Boaventura-Cunha, J.; Fernandes, L. Influence of Air Vents Management on Trombe Wall Temperature Fluctuations: An Experimental Analysis under Real Climate Conditions. Energies 2021, 14, 5043. [Google Scholar] [CrossRef]
- de Sousa Fernandes, L.P. Definição de um Sistema de Controlo e Automação para Otimização do Desempenho Térmico da Parede de Trombe. Master’s Thesis, Universidade de Trás-os-Montes e Alto Douro, Vila Real, Portugal, 2017. [Google Scholar]
- Mikhailov, M.S.; Strelkov, N.O. Application of Wi-Fi and LoRa Technologies for Wireless Measurement of Physical Quantities. In Proceedings of the 2019 International Youth Conference on Radio Electronics, Electrical and Power Engineering (REEPE), Moscow, Russia, 14–15 March 2019; pp. 1–4. [Google Scholar]
- Valerio, P. Top Wireless Standards for IoT Devices, Blog. 2019. Available online: https://iot.eetimes.com/top-wireless-standards-for-iot-devices/ (accessed on 30 September 2021).
- Khakimov, A.; Muthanna, A.; Kirichek, R.; Koucheryavy, A.; Muthanna, M. Investigation of methods for remote control IoT-devices based on cloud platforms and different interaction protocols. In Proceedings of the 2017 IEEE Conference of Russian Young Researchers in Electrical and Electronic Engineering (EIConRus), St. Petersburg/Moscow, Russia, 1–3 February 2017. [Google Scholar] [CrossRef]
- A technical overview of LoRa® and LoRaWAN™. Technical Paper from Semtech. Available online: https://lora-alliance.org/wp-content/uploads/2020/11/what-is-lorawan.pdf (accessed on 2 July 2020).
- Staniec, K.; Kowal, M. LoRa Performance under Variable Interference and Heavy-Multipath Conditions. Wirel. Commun. Mob. Comput. 2018, 2018, 1–9. [Google Scholar] [CrossRef]
- Team, The Things Network Global. LoRaWAN® Distance World Record Broken, Twice. 766 km (476 miles) Using 25 mW Transmission Power. Blog. Available online: https://www.thethingsnetwork.org/article/lorawan-distance-world-record (accessed on 5 July 2020).
- Ray, B.; What Is LoRa? A Technical Breakdown. Blog. Available online: https://www.link-labs.com/blog/what-is-lora (accessed on 5 July 2020).
- Augustin, A.; Yi, J.; Clausen, T.H.; Townsley, W. A Study of LoRa: Long Range & Low Power Networks for the Internet of Things. Sensors 2016, 16, 1466. [Google Scholar] [CrossRef]
- Lauridsen, M.; Vejlgaard, B.; Kovacs, I.Z.; Nguyen, H.; Mogensen, P. Interference Measurements in the European 868 MHz ISM Band with Focus on LoRa and SigFox. In Proceedings of the 2017 IEEE Wireless Communications and Networking Conference (WCNC), San Francisco, CA, USA, 19–22 March 2017. [Google Scholar]
- Springer, A.; Gugler, W.; Huemer, M.; Reindl, L.; Ruppel, C.; Weigel, R. Spread spectrum communications using chirp signals. In Proceedings of the IEEE/AFCEA EUROCOMM 2000. Information Systems for Enhanced Public Safety and Security (Cat. No.00EX405), Munich, Germany, 19 May 2000; pp. 166–170. [Google Scholar] [CrossRef]
- What are LoRa® and LoRaWAN®? Tech Paper. Available online: https://lora-developers.semtech.com/library/tech-papers-and-guides/lora-and-lorawan/ (accessed on 29 September 2021).
- LoRaWAN Architecture, Documentation. 2020. Available online: https://www.thethingsnetwork.org/docs/lorawan/architecture.html (accessed on 29 September 2021).
- LoRaWAN Spreading Factor, Range, DATA rate in LoRa System. Available online: https://www.rfwireless-world.com/Terminology/LoRaWAN-Spreading-factor-Range-and-Data-Rate.html (accessed on 29 September 2021).
- Limitations: Data Rate, Packet Size, 30 s Uplink and 10 Messages Downlink per day Fair Access Policy [Guidelines], Forum. 2020. Available online: https://www.thethingsnetwork.org/forum/t/fair-use-policy-explained/1300 (accessed on 29 September 2021).
- Lie, R. LoRa/LoRaWAN Tutorial 19: LoRa End Nodes. Available online: https://www.youtube.com/watch?v=vMMFCxzSP_s&t=6s (accessed on 29 September 2021).
- SX1272/3/6/7/8: LoRa Modem Designer’s Guide. Designer’s Guide. Available online: https://www.rs-online.com/designspark/rel-assets/ds-assets/uploads/knowledge-items/application-notes-for-the-internet-of-things/LoRa%20Design%20Guide.pdf (accessed on 28 September 2021).
- LoRa® Gateways, Semtech’s Products Page. 2020. Available online: https://www.semtech.com/products/wireless-rf (accessed on 29 September 2021).
- Network Security, Forum. 2020. Available online: https://www.thethingsnetwork.org/docs/network/security/ (accessed on 29 September 2021).
- React App. Documentation. Available online: https://www.mathworks.com/help/thingspeak/react-app.html (accessed on 29 September 2021).
- ThingHTTP App. Documentation. Available online: https://www.mathworks.com/help/thingspeak/thinghttp-app.html (accessed on 29 September 2021).
- Liu, Y.; Wang, D.; Ma, C.; Liu, J. A numerical and experimental analysis of the air vent management and heat storage characteristics of a trombe wall. Sol. Energy 2013, 91, 1–10. [Google Scholar] [CrossRef]
- Pfeffer, Z. DevEUI, AppEUI (JoinEUI) and AppKey. 2018. Available online: https://www.centennialsoftwaresolutions.com/post/deveui-appeui-joineui-and-appkey (accessed on 29 September 2021).
- Security. 2020. Available online: https://www.thethingsnetwork.org/docs/lorawan/security.html (accessed on 29 September 2021).
- LoRaWAN™ SECURITY, White Paper. 2017. Available online: https://lora-alliance.org/sites/default/files/2019-05/lorawan_security_whitepaper.pdf (accessed on 2 August 2020).
- ThingHTTP, Forum. 2014. Available online: https://community.thingspeak.com/documentation.../apps/thinghttp/ (accessed on 29 September 2021).
- Raftery, H. LoRaWAN: OTAA or ABP? 2018. Available online: https://www.newieventures.com.au/blogtext/2018/2/26/lorawan-otaa-or-abp (accessed on 4 August 2020).
- Pycom Go Invent. LoPy4 Version 1.1, Datasheet. Available online: https://docs.pycom.io/gitbook/assets/specsheets/Pycom_002_Specsheets_LoPy4_v2.pdf (accessed on 29 September 2021).
- The Things Network. The Things Gateway Datasheet. Available online: http://www.farnell.com/datasheets/2552236.pdf?_ga=2.173850791.580724957.1597865279-1450960015.1597865279 (accessed on 29 September 2021).
- Lange, E.D.; Project Title. GitHub Page. 2019. Available online: https://github.com/erikdelange/WiPy-2.0-DHT22 (accessed on 29 September 2021).











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Environment | Reach (km) |
|---|---|
| Urban Areas | 2–5 |
| Rural Areas | 5–15 |
| Line of Sight | >15 |
| Spreading Factor | Bit Rate | Range | Time on Air |
|---|---|---|---|
| SF10 | 980 bps | 8 km | 371 ms |
| SF9 | 1760 bps | 6 km | 185 ms |
| SF8 | 3125 bps | 4 km | 103 ms |
| SF7 | 5470 bps | 2 km | 61 ms |
| Data Rate | Configuration | bits/s |
|---|---|---|
| DR0 | SF12/125 KHz | 250 |
| DR1 | SF11/125 KHz | 440 |
| DR2 | SF10/125 KHz | 980 |
| DR3 | SF9/125 KHz | 1760 |
| DR4 | SF8/125 KHz | 3125 |
| DR5 | SF7/125 KHz | 5470 |
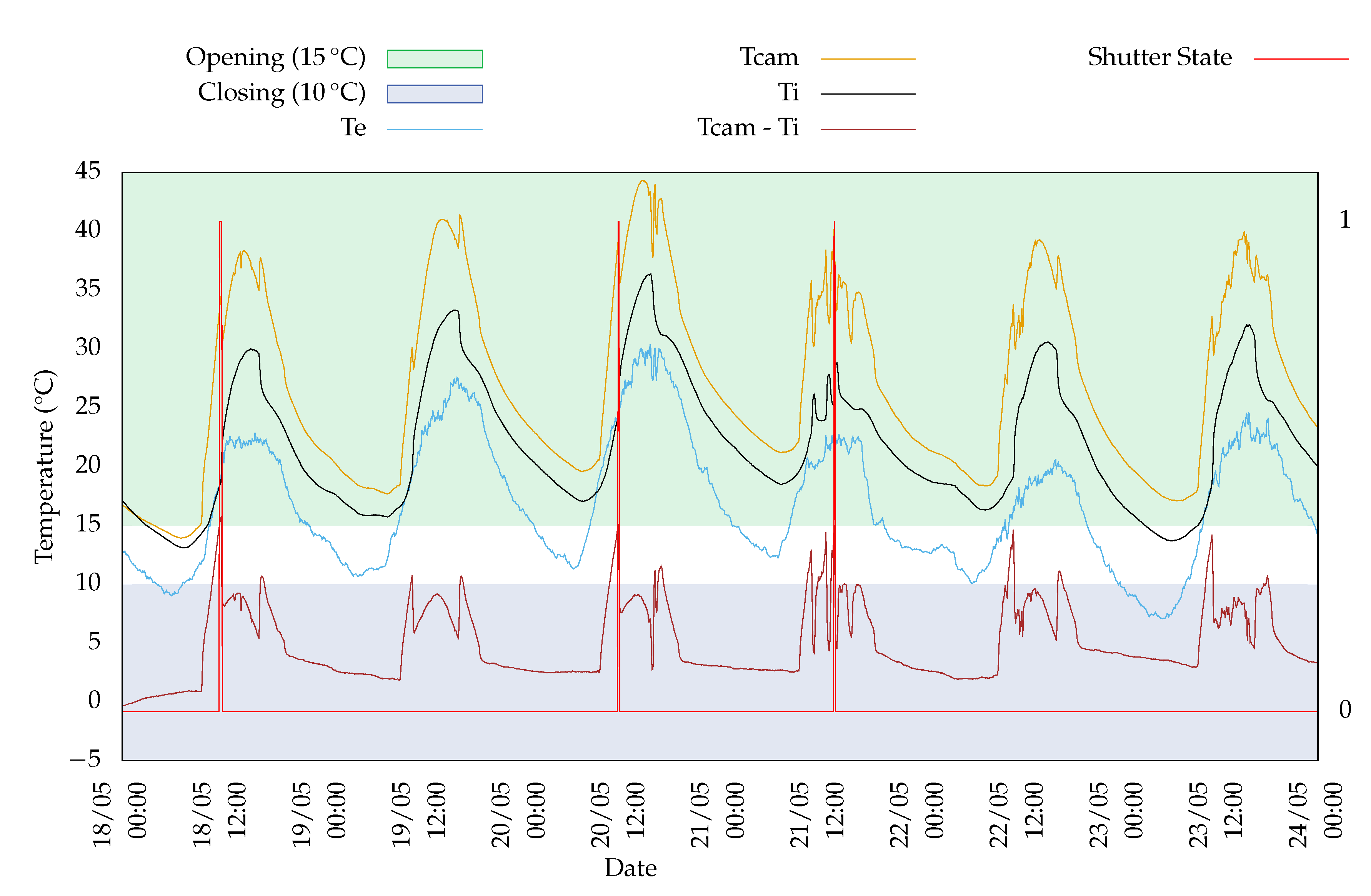
| DHTcam—DHTi | XPS Boards State |
|---|---|
| >15 °C | Open (01) |
| <10 °C | Closed (00) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mota, A.; Briga-Sá, A.; Valente, A. Development of a Wireless System to Control a Trombe Wall for Poultry Brooding. AgriEngineering 2021, 3, 853-867. https://doi.org/10.3390/agriengineering3040054
Mota A, Briga-Sá A, Valente A. Development of a Wireless System to Control a Trombe Wall for Poultry Brooding. AgriEngineering. 2021; 3(4):853-867. https://doi.org/10.3390/agriengineering3040054
Chicago/Turabian StyleMota, Afonso, Ana Briga-Sá, and António Valente. 2021. "Development of a Wireless System to Control a Trombe Wall for Poultry Brooding" AgriEngineering 3, no. 4: 853-867. https://doi.org/10.3390/agriengineering3040054
APA StyleMota, A., Briga-Sá, A., & Valente, A. (2021). Development of a Wireless System to Control a Trombe Wall for Poultry Brooding. AgriEngineering, 3(4), 853-867. https://doi.org/10.3390/agriengineering3040054