Abstract
This paper reports the results of a recently concluded R&D project, SCALS (Smart Cities Adaptive Lighting System), which aimed at the development of all hardware/software components of an adaptive urban smart lighting architecture allowing municipalities to manage and control public street lighting lamps. The system is capable to autonomously adjust street lamps’ brightness on the basis of the presence of vehicles (busses/trucks, cars, motorcycles and bikes) and/or pedestrians in specific areas or segments of the streets/roads of interest to reduce the energy consumption. The main contribution of this work is to design a low cost smart lighting system and, at same time, to define an IoT infrastructure where each lighting pole is an element of a network that can increase their amplitude. More generally, the proposed smart infrastructure can be viewed as the basis of a wider technological architecture aimed at offering value-added services for sustainable cities. The smart architecture combines various sub-systems (local controllers, motion sensors, video-cameras, weather sensors) and electronic devices, each of them in charge of performing specific operations: remote street segments lamp management, single street lamp brightness control, video processing for vehicles motion detection and classification, wireless and wired data exchanges, power consumptions analysis and traffic evaluation. Two pilot sites have been built up in the project where the smart architecture has been tested and validated in real scenarios. Experimental results show that energy savings of up to 80% are possible compared to a traditional street lamp system.
1. Introduction
According to [1,2], 80% of currently produced electrical power is used to supply urban necessities and about 60% out of this is required for street lamps, due to their continuous operations at night time. Thus, energy saving is a key point in the context of smart cities; in this paper, we focus on the achievable energy savings by adopting smart lighting systems in place of traditional incandescent/fluorescent lamps.
In this respect, smart lighting control systems play a crucial role in energy consumption reduction. In fact, the advances in wired and wireless networks, control technologies and embedded systems have made it feasible to design modern lighting systems endowed with smart technologies where the energy savings issue can be efficiently dealth with.
The Internet-of-Things (IoT) paradigm has emerged as a new network framework in which a large variety of devices and objects are embedded with sensors, software and other technologies for the purpose of connecting and exchanging data with other devices and systems over the Internet thanks to communication technologies such as WiFi, GSM, ZigBee, etc. [3]. The choice of communication technology plays a key role in the design of an IoT architecture and is closely related to the application into consideration. As an example, in applications such as wearable IoT devices where a body sensor node is normally equipped with a very limited energy source, the life-cycle of the sensor node heavily depends on the battery dimensions and on the processing and communication duty-cycling. For these reasons, many research efforts are focusing on the use of low power communication technologies, with the aim of optimizing energy consumption [4]. However, in order to arrive to a feasible and cost-effective integration of different applications, it is necessary to find a compromise between size, costs and connectivity range of the network devices. As an example, short range wireless technologies, such as WiFi network devices, are not useful from an energetic point of view whilst long range technologies, like GSM (Global System for Mobile Communications), are too expensive and are not suitable for IoT applications. In recent years, Low-Power Wide Area Networks (LP-WANs) have gained a lot of consideration in the IoT context due to their low power consumption and long range capabilities. In this respect, long-range (LoRa) and narrow-band (NB) devices [5,6,7] are LPWAN leading technologies in the design of Wireless Sensors Networks (WSNs) and are considered as the basis for IoT applications (e.g., agriculture, medicine, industry, etc.). Smart cities are probably the most suitable application context for WSNs allowing the readily development of smart micro-grid, smart lighting, video surveillance and so on [8]. LoRa and ZigBee protocols have gained an important role as wireless middle-wares due to their simplicity and their technical specifications that allows one to enable power efficient wireless communication over long distances.
In recent years, smart lighting systems have received global attention and several research programs have been carried out to show the potential and the positive impact provided by smart technologies aimed at increasing the efficiency of street lamps management. These technologies embed street lamps with sensors, control algorithms and wireless communications to build a lighting solutions able to work autonomously in the Internet of Things (IoT) context [9].
In general, a Smart Street can be defined as a street made up of multifunctional smart lighting poles equipped with various devices allowing them to communicate each other and share data with a remote management system. The main goals of a smart street lighting system include a better and more flexible exploitation of the urban environment, especially in terms of energy savings and costs reduction.
Many studies and projects on smart lighting infrastructures have been presented in the literature covering various aspects of a smart street lighting system. Among them, in [10] the technical aspects of the design of smart infrastructures for public lighting networks based on the IEEE 802.15.4 short-range communication technology are investigated. A case study concerning a smart-building application based on the LoRa low-rate, long-range communication protocol is also presented. In [11], the advantages of using LED DC lamps with respect to traditional street lamps are emphasized. In fact, the LED technology is characterized by longer lifetime, lower maintenance costs, higher efficiency, and, most of all, the lamp are mercury-free and turn out to be easily disposable. In [12] an overview about the smart lighting system for outdoor and indoor applications is presented whilst in [13] the impact of LED street lighting is analyzed and changes of the street lighting municipal regulations are proposed to promote and ensure the adoption of the LED technology. In [14], a prototype of smart street-lighting system is presented, where a number of DC street lights are powered by photovoltaic (PV) panels. The prototype includes a motion sensing circuit and exploits a battery to store the excess energy harvested by the solar panel. The overall result is a smart and efficient street lighting system.
Further energy consumption reduction can be achieved if the LED lamps intensity is controlled by a logic able to compute, on the basis of current traffic and weather information, suitable brightness set-points for specific areas or segments of the street so as to implement a sort of “on-demand” lighting system. The reference [15] presents a case study of an adaptive street lighting system based on a model that, from a theoretical point of view, can ensure energy saving up to 88% with respect to using conventional sodium lamps.
Here, the main idea is to maintain the lamps’ brightness at their minimum allowable level in a certain segment of the street that is compatible with national/regional standards and/or safety limits for both vehicular and pedestrian traffic. These aspects have been widely dealt with in many studies where various, from simple to more elaborated, brightness reductions strategies have been proposed. These strategies can be very sophisticated and can modulate the minimum allowable brightness on different levels depending on if a single or many vehicles are present in the street segment of interest, while also taking into account the presence of bikers or motorcyclists along with cars or trucks [16]. Further aspects to be considered in setting down the lamp brightness are related to citizen security and pedestrian and driver safety. The lamp brightness should be so that the minimum allowable level is compliant with the security standard. In view of this, smart lighting and sensors (e.g., camera endowed with video analysis electronic device) embedded in street lights may reduce local disturbance by alerting law enforcement to potential problems by capturing anomalous behavior. Furthermore, the pedestrians need enough brightness in walking along the pavements and crossing the streets in order to avoid obstacles and unevenness. In the same way, the drivers need to see obstacles within their safety braking distance for comfortable and safe driving, which is a direct function of the vehicle speed and current weather conditions.
Ways to implement these concepts have been discussed, e.g., in [17,18], where a specific wireless network based on the ZigBee protocol (Wi-Fi, based on IEEE 802.11, is a very efficient wireless technology; however, it is optimized for large data transfers using high-speed throughput, rather than low power consumption. As such, Wi-Fi is unsuitable for low-power (coin cell) operation. On the other hand, ZigBee technology is designed to carry small amounts of data over a short distance while consuming very little power. As opposed to WiFi, it is a mesh networking standard, meaning each node in the network is connected to each other. When speaking specifically about power consumption, ZigBee-based networks generally consume 25% of the power of WiFi networks. (https://www.digikey.com/en/articles/comparing-low-power-wireless-technologies—https://www.link-labs.com/blog/zigbee-vs-wifi-802-11ah) has been presented to attend the necessity of a distributed smart street lighting system, capable to control and monitoring many areas containing a large number of street lamps. Similar approaches have been considered in [19,20], where a LED system equipped with sensors and control technologies is used to undertake vehicles motion detection to regulate the brightness of the lamps.
In this paper, the outcomes of a recent project (SCALS—Smart Cities Adaptive Lighting System) focused on the design and the experimentation of a smart lighting control are presented. The system is based on the use of local sensors, local controllers, video-processing algorithms for motion detection and remote web application. The main contribution of this work is to design a low cost lighting system capable to regulate the street light intensity on the basis of traffic presence in a monitored street. At same time, the work aims to design an IoT infrastructure where each lighting pole is an element of a network that can increase continuously their amplitude. More generally, the proposed smart infrastructure can be viewed as the basis of a wider technological architecture aimed at offering services (e.g., energy management, environmental monitoring, traffic monitoring and management, decision process support, etc.) for sustainable cities. In this context, a lighting pole plays a key role and can be viewed as an enabling element for value-added services. In this respect, the main idea is to endow street lamps with electronic devices designed and customized to control the light intensity as a function of vehicles and pedestrian presence in the accounted area. Furthermore, street lamps are organized as a WSN that, through ZigBee communication, can share data among them and with a network coordinator. The experimentations have shown that the proposed architecture is able to provide the following advantages:
- energy savings;
- taxes reduction for the community;
- improving general well-being.
Another important issue relies on the idea that adopting a smart lighting systems able to adapt automatically in real-time the light intensity and its features (i.e., luminance, flux, etc.) as a function of “street actual needs”, is nowadays considered as a key instrument to reduce energy waste, light pollution and, in a more broader view, greenhouse gas emissions [21,22,23].
In this respect, this paper describes all details about the implementation of the smart lighting architecture and presents a significant added value with respect to the preliminary results of this work published in [24]. The design choices concerning the infrastructure working modes, network architecture, remote management web application and video processing procedure are presented here in some details. In particular, it can be highlighted that the network architecture exploits the ZigBee communication protocol that allows one to overcome the limitations due to the use of power line communication (PLC) protocols, used in preliminary studies. In fact, unlike the PLC technology whose efficiency depends on the state of the power line, the ZigBee protocol allows one to establish a long distance multi-point secure network connection regardless of the state of the transmission medium.
Furthermore, the video processing algorithm used here for traffic detection and classification is described in full detail. The details of the protection and integrity of the data exchanged with the remote web application are also accounted. In this respect, in addition to access control based on the user credentials, the functionalities of the HyperText Transfer Protocol Secure (HTTPS) are exploited.
The rest of the paper is organized as follows: Section 2 presents the main features of the proposed smart lighting system. The network infrastructure is described in Section 3 while Section 4 is devoted to illustrate the single lamp lighting controller and its interactions with the other electronic devices. Section 5 briefly describes the remote web application while in Section 6 the video processing algorithms used for vehicles motion detection is described. Finally, Section 7 reports the results obtained in two pilot sites and some conclusions end the paper.
2. Adaptive Smart Street Lighting Architecture
The proposed system is focused on the definition of an intelligent public street lighting infrastructure that can ensure:
- the remote management of the street lighting system;
- an intelligent control of the street lighting lamps by providing the necessary light intensity at each lamp/group-of-lamps as a function of daily time, vehicle and/or pedestrian presence and/or weather conditions.
Figure 1 depicts the infrastructure concept which provide the services and facilities listed below:
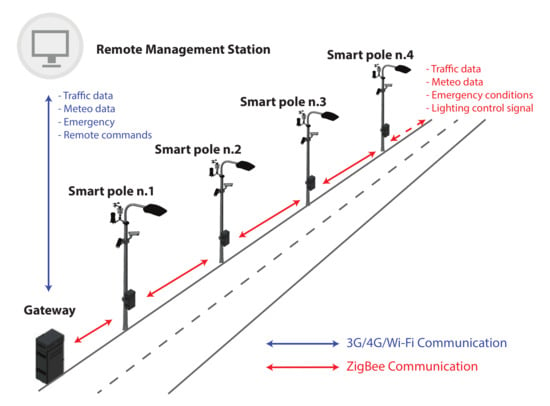
Figure 1.
Smart Street Lighting Concept.
- Single or group of street lamps control;
- A network of local communication devices based on the IEEE 802.15.4 specifications and realized by the high-level Zigbee communication protocol;
- Traffic and emergency conditions (e.g., road congestions and/or accidents) monitoring;
- Consumptions evaluation;
- Remote control and access to all functionalities for configuring the daily lighting schedules and monitoring alarms through web application;
- Remote communication, between smart-phones and the web application, based on 3G/4G/ WiFi connections.
The smart infrastructure highlights the presence of the so-called smart pole. A smart pole is a street light lamp mainly composed by a local control device, a video camera and a computational unit for video processing, weather sensors, communication devices and highly efficient LED lamps. The smart poles can exchange data (control commands and information requests) among them and, through a gateway, with a remote management web application. The smart-pole working modes can be summarized as follows:
- day time—Traffic monitoring functions are only enabled: all traffic data are extracted in real-time through video processing and shared with the web application.
- night time— All smart functionalities are enabled and single/group LED lamp dimming is performed on the basis of vehicles or pedestrians presence in the monitored area (street segment, roundabout, square, etc...). In particular, if no vehicular/pedestrian presence is detected in the monitored area, the LED light intensity is kept fixed to the minimum value prescribed by the street lighting regulations. Otherwise, if a presence is detected, the LED light intensity is increased up to the most suitable value for the monitored area, optionally based also on the number and kind of vehicles detected and on the current weather conditions. In such a way, the LED light intensity is considered as a function of vehicular/pedestrian presence and, in turn, a huge energy saving can be achieved whenever the traffic is null for long periods at night time.
- failsafe default emergency condition—If, due to a loss of connectivity or to a component damage, the smart lighting system fails a default condition is activated in order to avoid that the general safety may be compromised. In this condition, all smart functionalities are disabled and the system works as a traditional unconnected lighting system.
In view of this, it is noticeable that smartness of the infrastructure is achieved by the following main steps:
- 1.
- Detection of vehicle and pedestrian presence in the monitored area;
- 2.
- Lamp brightness modulation as a function of daily hours, presence and weather conditions (ambient brightness, rain, fog, etc.);
- 3.
- Providing, in all operating conditions, enough level of brightness as provided by national/regional standard rules;
- 4.
- Sharing information and alerting the remote management and control station.
It is worth noticing that in some scenarios there is no need to equip all poles with motion detection devices. For instance, in a straight road without side access, the smart lighting system can be configured so that only two poles (at the beginning and at the end of the road) are equipped with motion detection devices. In such a way two kind of smart poles can be defined:
- smart master pole, equipped with motion detection, weather station and dimming devices;
- smart slave pole, equipped with dimming devices only.
On the other hand, it should be highlighted that in some specific scenario (e.g., square, crossroads, etc.), although the smart lighting system is able to verify in real-time both vehicular and pedestrian traffic and then provide in all conditions, the right lighting level might not be necessary to equip the lighting pole with motion detection device. In such a condition, the smart system can be equipped only with a dimming device and remotely set to work so that the necessary light intensity at each lamp/group-of-lamps is provided as a function of daily time.
Figure 2 shows the flow charts representing the operating procedure of master (a) and slave (b) poles. In detail, after the initialization step, following the operating procedure the master pole holds the current lighting setting until a change in either the ambient brightness or the weather or traffic conditions is detected. In such case, according with the new conditions, the master pole sets a new lighting level and generates an external event that is shared with the slave poles via the local communication channel. On the other hand, the slave pole holds the current lighting setting until an external event is received. In this case, the lighting level is updated according to the master pole command.
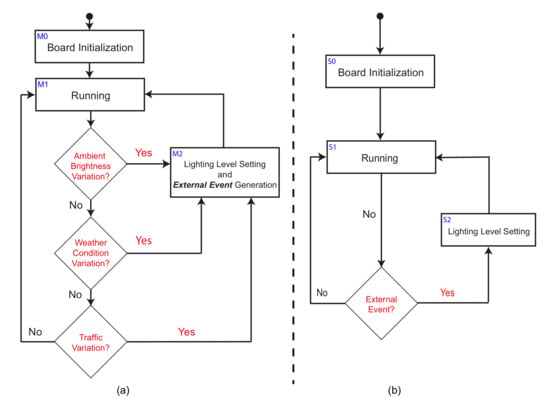
Figure 2.
Flow charts: master pole (a) master and slave pole (b).
3. Network Infrastructure
The system architecture (Figure 3) exploits local and remote communication channels. The local communication channel allows data exchange amongst the smart poles. On the other hand, the remote communication channel enables the data exchange between the smart poles and the remote server and, consequently, allows the centralized consultation of the collected data (i.e., power consumption, traffic condition in different streets, weather conditions and so on).
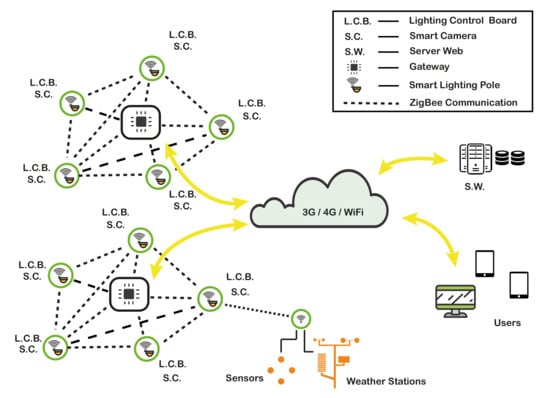
Figure 3.
System architecture.
The communication amongst the smart poles is based on the 802.15.4 IEEE ZigBee wireless protocol, that is an open and global standard for communication among wireless devices. One of the main advantages in the use of Zigbee devices is that they can easily be integrated into IoT applications via Zigbee gateways. Another important aspect in the use of such kind of protocol is that the 802.15.4 IEEE standard provides the ZigBee protocol stack MAC layer that gives basic security services and interoperability between devices. The basic security services allows to maintain an access control list and the use of symmetric encryption algorithm to protect the transmission of data [25]. In a ZigBee network, the devices can be configured as:
- coordinator/gateway: in this configuration the device is responsible for forming the network and routing traffic to other devices. Every network has to have only one coordinator.
- router: the device can route traffic to other devices.
- end device: the device can not route traffic to other devices.
As depicted in Figure 3, the system architecture provides that:
- multiple local network can be configured;
- each local network is managed trough a coordinator (gateway) device;
- the electronic devices (e.g., video processing board, lighting control board and all other devices installed in the system) belonging to each local network are equipped with a ZigBee radio module;
- the radio nodes acts as router and are organized in a mesh topology where each node connects to the signal and passes it on to the next device.
From a theoretical point of view, the Zigbee protocol can handle up to 65,000 devices in a network (https://zigbeealliance.org/solution/zigbee/). However in real application, due to the presence of environment disturbance elements (e.g., obstacles as building and trees or other transmission devices) the network size has to be strongly reduced in order to maintain, at the same time, signal strength and efficiency in sending and receiving data. As a consequence, the network size is a parameter that can vary on the basis of both application and environmental contexts. Therefore, to efficiently size the network, it is recommended the use of specific software (e.g., XCTU configurations platform for XBee Solutions from DiGi International Inc., (Hopkins, MN, USA) https://www.digi.com/products/embedded-systems/digi-xbee/digi-xbee-tools/xctu) that allows to check the quality of the link between the connected devices, the device addresses and other network parameters.
The network exploits various routing policies for the exchange of messages (command or information requests) between smart poles. In such way, as shown in Figure 4, the gateway can send information-requests/commands to a single smart pole (unicast routing), a group of smart poles (multicast routing) or all smart poles connected to the network (broadcast routing).
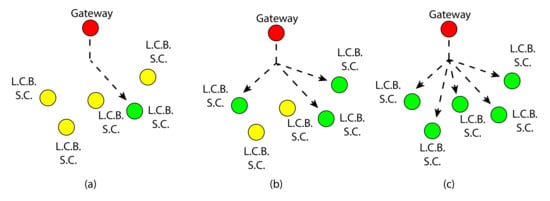
Figure 4.
Message routing: unicast (a), multicast (b) and broadcast (c).
The communication between the network coordinator (gateway) and the server or the users’ smart-phones is performed through a 3G/4G/WiFi communication network.
Furthermore, it is highlighted that the communication between the network nodes, the gateway and the smart-phones exploits a custom communication whose details can be found in [24].
4. Lighting Control System
The lighting control system is in charge to adjust the lamps brightness in real-time on the basis of daily time and traffic intensity and classification so that the power consumption is minimized and proper lighting levels are always guaranteed in every traffic and weather condition. The control system mainly exploits two electronic devices (Smart Camera and Lighting Control Board) and a network link between them. Figure 5 shows the lighting control procedure and the basic idea in the interaction between the smart camera and the lighting control board. Both devices have been designed, assembled and properly customized for our smart lighting application and equipped with a ZigBee device in order to exchange data (information request/command) with the other smart cameras and control boards. The communication between the smart camera and lighting control boards exploits the communication protocol previously described.
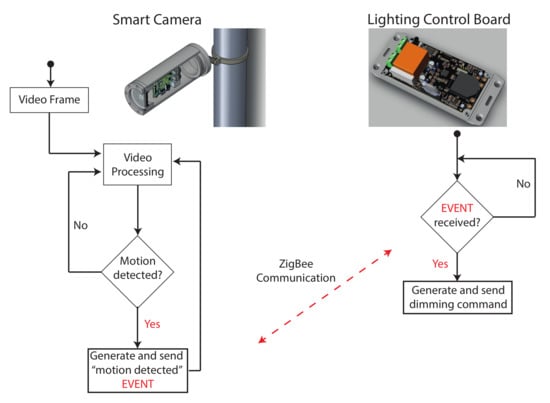
Figure 5.
Lighting control procedure and boards interaction.
The Smart Camera can process video streaming. It implements the video processing algorithm reported in Section 6 to detect moving objects in the monitored area. Hence, when either vehicles or pedestrians are detected a ‘motion detected’ event is generated by the master pole who detected the event and sent, via the local communication channel (Zigbee based communication), to all poles equipped with the lighting control board.
On the other hand, the control board, complying with the International Electrotechnical Commission Standards (Standard 60929 Annex E), allows one to adjust the intensity level by adopting a 0–10 V analog lighting control protocol [26]. Basically, a control command applies a voltage between 0 and 10 DC volts to produce a varying light intensity level. The light output changes are proportional to the DC voltage variations. The standard requires that the ballast (or driver) provides full light output when the control voltage is 10 Volts. At a control voltage of 1 volt, the ballast (driver) provides it’s minimum light level. Any voltage lower than 1 volt is defined as the minimum.
When the ‘motion detection’ event is received, the lighting control board generates a control command that is conveyed to all poles present in the street segment under control. After a settable number of seconds, if no further ‘motion detection’ events occur, the control board drives the LED lamp to the minimum lighting values prescribed by the street lighting regulations.
In addition to the described control strategy, the lighting control board allows different control modes. As an example, it can operate both by following daily lighting profiles (the light intensity of the lamp is follows a temporal profile) or event-based scheduled values of light intensity. Furthermore, the control architecture allows one to arrange the poles in different groups which can operate with different control modalities.
The lighting control board is also in charge of:
- adjusting the lighting level as a function of environment conditions by exploiting data from ambient brightness sensors and the weather station;
- detecting anomalous behaviors in the network of poles and faults on street lamps. If such anomalous conditions occur, the board generates an event that is transmitted to the remote web application and the failsafe default emergency operating mode is enabled.
5. Remote Management and Control via Web Application and Mobile APP
A further important aspect in a smart lighting systems is the friendliness level of interactions between the system managers and the infrastructure. In view of this, our system is endowed with a web application and mobile APP that allows remote management and control by providing the following services:
- Account management that allows the manager to define the permissions and the access levels to the web application and mobile APP (i.e., super-administrator, system manager, system operator, user, etc.);
- Control modality selection;
- Lighting system monitoring and control;
- Anomalous conditions detection and alarms generation;
- Traffic and meteo information monitoring;
- Energy consumption evaluation.
The remote web application provides access to the smart lighting system settings. For instance it is possible to set the lighting profile to each single street lamp or to a group of them. It is, also, possible to set lighting level variation range so that abrupt change of brightness can be avoided. Moreover, the user can evaluate information related to the current/averaged consumption and energy saving, traffic intensity and classification, weather conditions and other alarms.
The remote web application, in addition to the typical access control based on user credentials checking, exploits the Hypertext Transfer Protocol Secure (HTTPS) to improve the protection of the privacy and the integrity of the exchanged data while in transit. Hypertext Transfer Protocol Secure (HTTPS) is a variant of the standard web transfer protocol (HTTP) that adds a layer of security on the data in transit through a secure socket layer (SSL) or transport layer security (TLS) protocol connection. Thanks to the HTTPS properties, the web application enables encrypted communication and secure connection between the remote users and the web server.
Figure 6 shows some illustrative pages of the web platform. In particular the street lighting remote management page is depicted Figure 6a where the user can operate in order to set the operating modes and configure the street poles operations. Moreover, information about street pole locations (via GPS data displayed on street maps) and status, lighting system consumption trends and fault alarms are displayed in this page. On the other hand, in Figure 6b is reported the pole management: this page shows information related to consumption trends, GPS information, lighting profile, energy costs evaluation and the energy saving granted by the smart system with respect to a traditional (e.g., classic sodium vapor street lights) or LED street lamps system. Finally, Figure 6c shows the traffic monitoring web page.
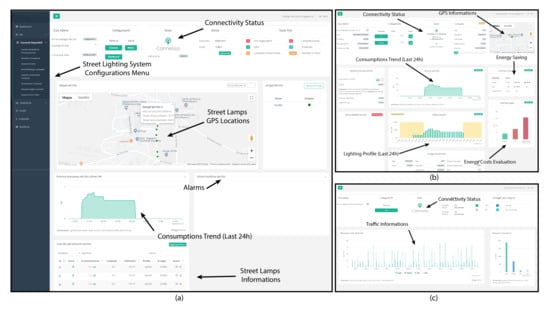
Figure 6.
Web application: remote management page (a), pole management page (b) and traffic monitoring (c).
The mobile APP includes all functionalities provided by the web application and, at same time, allows authorized users to manage the lighting levels of specific lamps. Thanks to this option, in the event of street emergency, any user with granted access (i.e., a police officer) can interact with the system and take the appropriate actions in order to improve the overall visibility.
6. Video Processing for Vehicles and Pedestrians Detection
Detection of moving objects (vehicles and pedestrians) is of paramount importance in traffic detection and classification and it is also relevant in smart street lighting control applications when traffic data are considered. Here, the aim of using video processing units is at detecting the presence of moving vehicles or pedestrians in a video sequence. To this end, every frame of the video sequence is split into two different logical areas [27]: the foreground, that collects pixels belonging to the objects of interest (e.g., pedestrians, cars, bikes, etc.); the background, that groups all pixels belonging to objects that remains fixed in all successive frames (e.g., buildings, sky, trees, etc.). The common approach for discriminating moving object from the background scene is the background subtraction method. The idea is to “subtract” the current image represented by a matrix from a reference image which is acquired from a static background during a period of time. If such a subtraction is greater then a certain threshold , i.e.,
then a moving objects is detected (Figure 7).
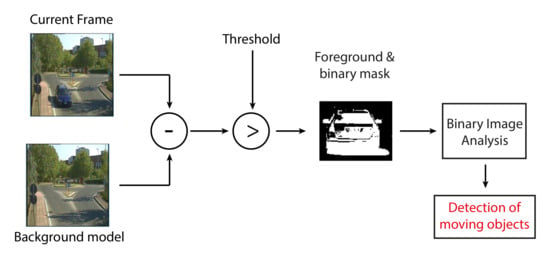
Figure 7.
Background subtraction and detection processes: general approach.
Several background subtraction algorithms have been proposed [27] and most of them are based on the following four steps (Figure 7): image pre-processing, background modeling process, foreground detection and binary mask creation process and binary image analysis.
The first step is an image processing task, in charge of converting the raw input video into a format that can be easily processed by the successive steps. Typically during this task, the RGB (Red-Green-Blue) image is converted into a gray-scale one. The second task is the background modeling process that uses the first frame or previous frames to build up a background model [28]. The foreground detection and binary mask creation process compares the input video frame with the background model and identifies candidate foreground pixels from the input frame [29]. A threshold logic is then used to convert the gray scale image into a binary mask, so that the objects of interest are separated from the background.
The last step is a binary image analysis finalized to eliminate the pixels that do not correspond to the current moving object. Furthermore, the binary image is processed in order to detect the moving objects and to identify vehicles and pedestrians.
Although many choices are possible, the adopted video-processing procedure exploits a background modeling procedure based on the recursive mixture of Gaussians model described in [30,31]. Besides the moving objects detection process, in order to classify vehicles and pedestrians, the algebraic procedure based on the eigenface approach initially proposed in [32] for faces recognition, here specialized for pedestrians and vehicles classification, is considered. This algorithm ensures an efficient execution on low cost boards. Classification can be achieved by comparing how objects are represented by the basis set composed by vehicles and pedestrians images (Figure 8).
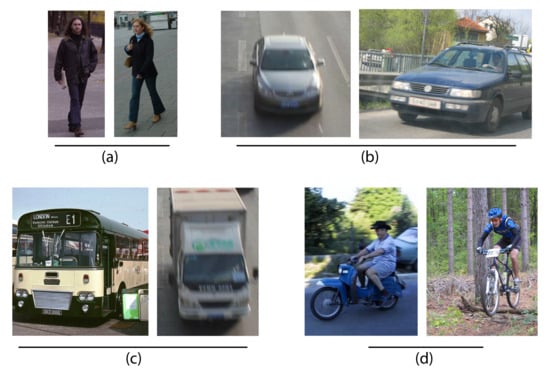
Figure 8.
Example of basis set for moving object classification: pedestrians (a) and vehicles (cars (b), trucks (c) and bikes (d)).
However, it is worth noting that this classification procedure, although it is relatively fast and accurate, is not immune from mis-classification episodes: target objects might have some spurious feature that brings the algorithm to classify them in the wrong classes. For example, SUVs can easily misunderstood as little trucks, pedestrians carrying voluminous objects cannot be detected as person, bicycles with bags as motorcycles, and so on. Table 1 shows the error rates relative to the analysis conducted over our hand-curated dataset composed by 100 elements for each kind of moving objects z.

Table 1.
Classification procedure—Performance Analysis.
Furthermore, the procedure here detailed improves the preliminary one described in [24] where the classification algorithm was based on a raw analysis of moving object dimensions.
7. Experimental Results
In order to demonstrate the effectiveness of the proposed smart street lighting system two experimental pilot sites were built up. This choice allowed us to set up two different application scenarios, which respectively refers to a busy road (experimentation site n.1) and to a secondary road (experimentation site n.2). The first site is a road owned by the University of Calabria (Italy) whilst the second one is owned by the municipal district of Crucoli (Italy).
The experimentation activity has been spitted in three different steps. The first step has concerned the collection of data related to consumptions of the traditional lighting systems originally present in the two demonstration sites.
Hence, these lighting systems consists of the following street lamps:
- Experimentation Site n.1: ten High Pressure Sodium (HPS) 250 [W] lamps with light intensity of 33.000 [lm];
- Experimentation Site n.2: ten High Pressure Sodium (HPS) 150 [W] lamps with light intensity of 17.700 [lm].
In the second step, for both experimentation sites, the existing HPS street lamps have been upgraded to LED technology. After the upgrading, a new data collection campaign aimed at comparing the consumptions before and after the LED lamps substitution, has been undertaken.
The last step has been focused on the installation of the smart devices in both the demonstration sites and collecting again the consumption data. Figure 9a,b and Figure 10a–c show, respectively, the state of the art experimentation site 1 and 2 before and after the upgrading works. In details, Figure 9a shows the experimentation site 1 in standard configuration where 250 [W] High Pressure Sodium lamps were present whilst Figure 9b shows the experimentation site in the Smart configuration. On the other hand, Figure 10a shows the traditional lighting poles, 250 [W] High Pressure Sodium lamps, that were originally used in the experimentation site 2 while Figure 10b,c shows the upgraded smart lighting pole and the experimentation site in the Smart configuration.
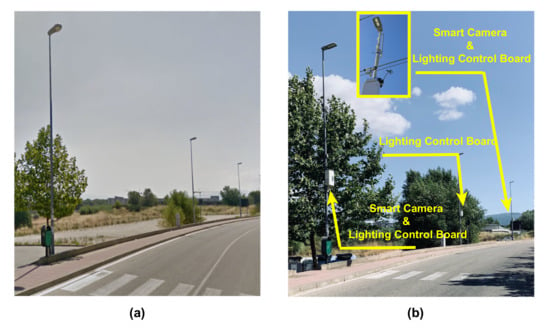
Figure 9.
Experimentation site n.1: standard (a) and smart lighting system (b) configurations.
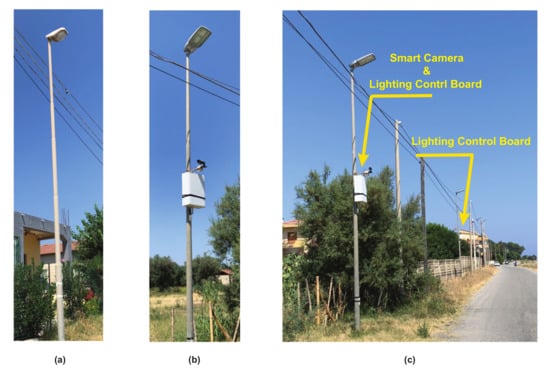
Figure 10.
Experimentation site n.2: standard pole (a), smart pole (b) and smart lighting system (c) configurations.
Table 2 reports data (number, type, power and light intensity of lamps) about the lighting system after the upgrading activities for both sites. It is important to note that the last two columns of Table 2 report the maximum and minimum light intensity, along with relative lamp powers, that are set-up when traffic is or not detected.
Table 2.
Experimentation Sites—Smart System.
The experimental activity, started in October 2018 and still ongoing, has been useful to compare the consumption of our smart lighting system with the respect to both traditional and LED-based systems. Figure 11 shows consumption comparison among the compared technologies for both the considered demonstration sites. Hence, the upper sub-figures of Figure 11a,b report the instant power trend from 17:10 h to 07:10 h whilst the lower sub-figures show the ”motion detected” event trend. From these Figures it can be observed that when the ”motion detected” event () is OFF the instant power of the Smart System is at minimum value (≈480 [W] for site n.1 and ≈320 [W] for site n.2). On the other hand, if a vehicle or a pedestrian is detected (i.e., the ”motion detected” event is ON) the instant power of the Smart System is at maximum value (≈1500 [W] for site n.1 and ≈1080 [W] for site n.2). It is important to note that these figures report, for a better view, data only from 17:10 h to 07:10 h.
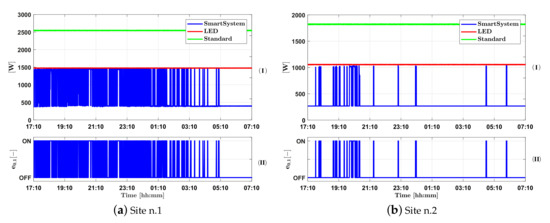
Figure 11.
Instant power trend [W]: busy (a) and secondary road (b).
Figure 12 shows the evaluation of the average daily consumption computed accounting the data measured during the experimentation activity. The average daily consumption values are reported in Table 3. Table 4 reports a comparisons of achieved energy saving. In particular, this table compares the energy saving achieved by the proposed smart lighting system w.r.t. the standard lighting system (column Smart vs. Std) and the LED lighting system (column Smart vs. LED). Furthermore the table compares the energy saving capability of the LED lighting system w.r.t. the standard lighting system (column LED vs. Std).
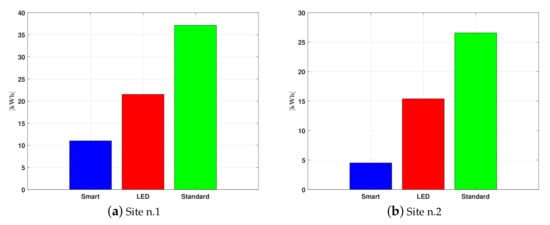
Figure 12.
Evaluation of average daily consumption [kWh]: busy (a) and secondary road (b).
Table 3.
Average daily consumption.
Table 4.
Energy saving.
It can be observed that the use of Smart technologies can ensure remarkably larger energy saving with respect to the standard lighting systems and LED systems.
With reference to the consumptions reported in Table 3 and to the energy unit cost for Site n.1 (0.25 [/kWh]) and Site n.2 (0.22 [/kWh]), Table 5 reports a comparison of the energy annual costs for both the experimentation sites:
Table 5.
Energy Annual Costs.
This table highlights that the smart lighting systems allows a remarkable saving.
The experimentation activities are also useful to validate the traffic (vehicles/pedestrians) detection and classification performances of smart lighting system. As stated in Section 2, the smart-pole operates in day time and night time working modes. When the smart-pole works in day time configuration all traffic data are extracted in real-time through a video processing procedure and shared with the remote web application. On the other hand, when the smart-pole works in night time single/group LED lamp dimming is performed on the basis of vehicles or pedestrians presence in the monitored area. In Figure 13 is reported as an example of the output of the video processing algorithm described in Section 6.
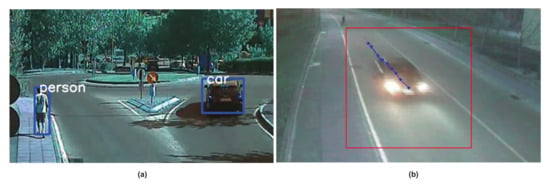
Figure 13.
Site n.1—day time (a) and night time (b) working modes.
Figure 14 reports the daily average traffic trend for both experimentation sites. The graph reports the traffic detected during daylight hours (from 07:00 h to 18:00 h—day time working mode). As expected, the traffic intensity in Site n.1 resulted in much larger traffic intensity than that in Site n.2. Table 6 reports the averaged annual traffic intensity and the classification results of the moving objects detected in both experimentation sites. The results show how the detection and classification procedure ensures good performance because there is a low percentage of ‘false detection’ that the system classifies as Unknown moving objects.
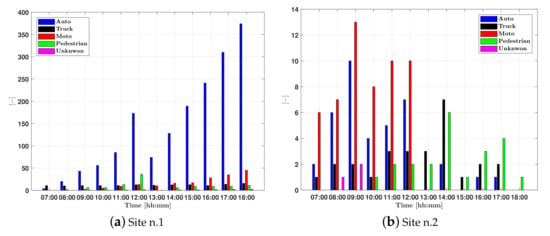
Figure 14.
Daily average traffic trend: busy road (a) and secondary road (b).
Table 6.
Experimentation Sites—Annual Average Traffic Intensity and Classification.
It is evident from the presented results that the proposed smart lighting technology can achieve huge energy savings in comparison with traditional systems. In fact, energy savings are up to 82.99% (while the energy savings pertaining to the LED substitution without smart functionality were limited to 42.07%) have been achieved when compared to the traditional system and up to 70.65% with respect to the LED upgraded system. Moreover, it is worth highlighting that the overall cost of the investment in this type of smart lighting technology is low and, thanks to the reduction of energy costs, is returned within two years from installation. Finally, the system is also capable of achieving good traffic monitoring performance. Demonstration videos of the smart lighting system can be found at the web link http://www.smartlightingproject.it/new/index.php/demo.
Remark to the Experimentation Activities and Future Application
The proposed system can be viewed as a valid solution for smart lighting applications. It is a low-cost and easy implementable solution and can be customized to be useful in various application contexts. It does not require extra maintenance activities and the achievable energy cost savings justify the investment in this kind of technology. Finally, it is worth remarking that, thanks to its characteristics, this smart lighting solution as been selected for the set-up of 180 lighting poles owned by the municipal district of Capranica Prenestina—Rome (Italy).
8. Conclusions
In this paper, a smart street lighting prototype has been described and shown to be effective in two experimental pilot sites. The proposed system has been designed so that it can be considered as an IoT infrastructure where each lighting pole can be viewed as an enabling element of value-added services (e.g., energy management, environmental monitoring and light pollution reduction, etc.) for sustainable cities. From this point of view, the overall architecture is scalable, can increase its functionality and can be implemented by connecting smart devices to the network. The paper first introduced a general system description, then the basic ideas and the main features of the smart lighting prototype have been presented. The system is able to establish the optimal lighting profile for each lamps on the basis of both traffic and weather conditions. The experimental stage has demonstrated that the proposed system is capable of achieving significant energy savings compared to traditional street lamp systems and, at the same time, allows the performance of traffic classification with a low rate of error. Furthermore, it is worthing pointing out that, thanks to the low implementation costs, the investment in smart lighting systems may be recovered in a short period and this represents a further advantage in the use of such technologies.
Author Contributions
Conceptualization, G.G.; Data curation, F.C.G.; Funding acquisition, G.G., M.L., G.C. and A.C.; Investigation, F.L.S.; Methodology, G.G.; Project administration, G.G., M.L. and G.C.; Software, F.C.G. and F.L.S.; Supervision, G.C. and A.C.; Writing—original draft, G.G. and F.T.; Writing—review & editing, F.T. and A.C. All authors have read and agreed to the published version of the manuscript.
Funding
This research is based upon work partially supported by the R&D project J28C17000170006, entitled ‘Smart Cities Adaptive Lighting System (SCALS)’, granted by the Calabria Region within the POR CALABRIA FESR-FSE 2014-2020 Asse I, Obiettivo Specifico 1.2.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Palumbo, M.L. Architettura Produttiva: Principi di Progettazione Ecologica; Maggioli Editore: Milan, Italy, 2012; ISBN 978-88-387-6849-8. [Google Scholar]
- Jagadeesha, Y.M.; Akilesha, S.; Karthika, S. Prasantha, Intelligent Street Lights. Procedia Technol. 2015, 21, 547–551. [Google Scholar] [CrossRef]
- Dudhe, P.V.; Kadam, N.V.; Hushangabade, R.M.; Deshmukh, M.S. Internet of Things (IOT): An overview and its applications. In Proceedings of the 2017 International Conference on Energy, Communication, Data Analytics and Soft Computing (ICECDS), Chennai, India, 1–2 August 2017. [Google Scholar] [CrossRef]
- Fortino, G.; Gravina, R.; Galzarano, S. Wearable Computing: From Modeling to Implementation of Wearable Systems Based on Body Sensor Networks; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2018; ISBN 9781119078821. [Google Scholar]
- Sarr, Y.; Gueye, B.; Sarr, C. Performance Analysis of a Smart Street Lighting application using LoRaWan. In Proceedings of the 2019 International Conference on Advanced Communication Technologies and Networking (CommNet), Rabat, Morocco, 12–14 April 2019. [Google Scholar] [CrossRef]
- Sinha, R.S.; Seung-Hoon Hwang, Y.W. A survey on LPWA technology: LoRa and NB-IoT. ICT Express 2017, 3, 14–21. [Google Scholar] [CrossRef]
- Zhu, H.; Chang, A.S.F.; Kalawsky, R.S.; Tsang, K.F.; Hancke, G.P.; Lo Bello, L.; Ling, W.K. Review of State-of-the-Art Wireless Technologies and Applications in Smart Cities. In Proceedings of the IECON 2017—43rd Annual Conference of the IEEE Industrial Electronics Society, Beijing, China, 29 October–1 November 2017. [Google Scholar] [CrossRef]
- Mehmood, Y.; Ahmad, F.; Yaqoob, I.; Adnane, A.; Imran, M.; Guizani, S. Internet-of-things-based smart cities: Recent advances andchallenges. IEEE Commun. Mag. 2017, 55, 16–24. [Google Scholar] [CrossRef]
- Castro, M.; Jara, A.J.; Skarmeta, A.F. Smart lighting solutions for smart cities. In Proceedings of the 27th IEEE International Conference on Advanced Information Networking and Applications Workshops (WAINA), Barcelona, Spain, 25–28 March 2013; pp. 1374–1379. [Google Scholar]
- Pasolini, G.; Buratti, C.; Feltrin, L.; Zabini, F.; De Castro, C.; Verdone, R.; Andrisano, O. Smart City Pilot Projects Using LoRa and IEEE802.15.4 Technologies. Sensors 2018, 18, 1118. [Google Scholar] [CrossRef] [PubMed]
- Cheng, C.A.; Chang, C.H.; Ching, T.Y.; Yang, F.L. Design and implementation of a Single-Stage Driver for supplying an LED Street-lighting Module with Power Factor Corrections. IEEE Trans. Power Electron. 2015, 30, 956–966. [Google Scholar] [CrossRef]
- Barve, V. Smart Lighting for Smart Cities. In Proceedings of the 2017 IEEE Region 10 Symposium (TENSYMP), Cochin, India, 14–16 July 2017. [Google Scholar]
- Garcia, R.B.; Angulo, G.V.; Gonzalez, J.R.; Tavizon, E.F.; Cardozo, J.I.H. LED Street Lighting as a Strategy for Climate Change Mitigation at Local Government Level. In Proceedings of the IEEE 2014 Global Humanitarian Technology Conference, San Jose, CA, USA, 10–13 October 2014; pp. 345–349. [Google Scholar]
- El-Faouri, F.S.; Sharaiha, M.; Bargouth, D.; Faza, A.Z. A smart street lighting system using solar energy. In Proceedings of the 2016 IEEE PES Innovative Smart Grid Technologies Conference Europe (ISGT-Europe), Ljubljana, Slovenia, 9–12 October 2016. [Google Scholar] [CrossRef]
- Hannan, S.; Humayun Kabir, M.; Uddin, M.J. A Case Study on a Proposed Adaptive and Energy Efficient Street Lighting System for Chittagong City. In Proceedings of the 1st International Conference on Advances in Science, Engineering and Robotics Technology 2019 (ICASERT 2019), Dhaka, Bangladesh, 3–5 May 2019. [Google Scholar] [CrossRef]
- Mohamed, S.E. Smart Street Lighting Control and Monitoring System for Electrical Power Saving by Using VANET. Int. J. Commun. Netw. Syst. Sci. 2013, 351–360. [Google Scholar] [CrossRef]
- Denardin, G.W.; Barriquello, C.H.; Pinto, R.A.; Silva, M.F.; Campos, A.; do Prado, R.N. An intelligent system for street lighting control and measurement. In Proceedings of the IEEE Industry Applications Society Annual Meeting, Houston, TX, USA, 4–8 October 2009. [Google Scholar]
- Denardin, G.W.; Barriquello, C.H.; Campos, A.; do Prado, R.N. An Intelligent System for Street Light Monitoring and Control. In Proceedings of the Brazilian Power Electronics Conference, Bonito-Mato Grosso do Sul, Brazil, 27 September–1 October 2009. [Google Scholar]
- Vena, P.C.; Tharakan, P.; Haridas, H.; Ramya, K.; Joju, R.; Jyothis, T.S. Smart street light system based on image processing. In Proceedings of the IEEE International Conference on Circuit, Power and Computing Technologies (ICCPCT), Nagercoil, India, 18–19 March 2016. [Google Scholar]
- Ikpehai, A.; Adebusi, B.; Kharel, R. Smart street lighting over narrowband PLC in a smart city: The Triangulum case study. In Proceedings of the IEEE 21st International Workshop on Computer Aided Modelling and Design of Communication Links and Networks (CAMAD), Toronto, ON, Canada, 23–25 October 2016. [Google Scholar]
- Sittoni, A.; Brunelli, D.; Macii, D.; Tosato, P.; Petri, D. Street lighting in smart cities: A simulation tool for the design of systems based on narrowband PLC. In Proceedings of the 2015 IEEE First International Smart Cities Conference (ISC2), Guadalajara, Mexico, 25–28 October 2015. [Google Scholar] [CrossRef]
- Yusoff, Y.; Rosli, R.; Karnaluddin, M.; Samad, M. Towards smart street lighting system in Malaysia. In Proceedings of the IEEE Symposium on Wireless Technology and Applications (ISWTA), Kuching, Malaysia, 22–25 September 2013; pp. 301–305. [Google Scholar]
- Higuera, J.; Hertog, W.; Peralvarez, M.; Polo, J.; Carreras, J. Smart lighting system ISO/IEC/IEEE 21451 compatible. IEEE Sens. J. 2015, 15, 2595–2602. [Google Scholar] [CrossRef]
- Gagliardi, G.; Casavola, A.; Lupia, M.; Cario, G.; Tedesco, F.; Lo Scudo, F.; Gaccio, F.C.; Augimeri, A. A smart city adaptive lighting system. In Proceedings of the 3rd International Conference on Fog and Mobile Edge Computing, FMEC 2018, Barcelona, Spain, 23–26 April 2018. [Google Scholar]
- Fan, B. Analysis on the Security Architecture of ZigBee Based on IEEE 802.15.4. In In Proceedings of the IEEE 13th International Symposium on Autonomous Decentralized System (ISADS), Bangkok, Thailand, 22–24 March 2017. [Google Scholar]
- Yan, L.; Chen, Y.; Chen, B. Integrated analog dimming controller for 0-10V dimming system. In Proceedings of the 10th China International Forum on Solid State Lighting (ChinaSSL), Beijing, China, 10–12 November 2013. [Google Scholar]
- Elhabian, S.Y.; El-Sayed, K.M.; Ahmed, S.H. Moving object detection in spatial domain using background removal techniques-state-of-art. Recent Patents Comput. Sci. 2008, 1, 32–54. [Google Scholar] [CrossRef]
- Xu, Y.; Dong, J.; Zhang, B.; Xu, D. Background modeling methods in video analysis: A review and comparative evaluation. CAAI Trans. Intell. Technol. 2016, 1, 43–60. [Google Scholar] [CrossRef]
- Zivkovic, Z.; Van Der Heijden, F. Efficient adaptive density estimation per image pixel for the task of background subtraction. Pattern Recognit. Lett. 2006, 27, 773–780. [Google Scholar] [CrossRef]
- Zivkovic, Z.; van der Heijden, F. Recursive Unsupervised Learning of Finite Mixture Models. IEEE Trans. Pattern Anal. Mach. Intell. 2004, 26, 651–656. [Google Scholar] [CrossRef] [PubMed]
- Zivkovic, Z. Improved adaptive Gaussian mixture model for background subtraction. In Proceedings of the 17th International Conference on Pattern Recognition, 2004. ICPR 2004, Cambridge, UK, 26 August 2004; Volume 2, pp. 28–31. [Google Scholar]
- Matthew, T.; Alex, P. Eigenfaces for recognition. J. Cogn. Neurosci. 1991, 3, 71–86. [Google Scholar]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).