1. Introduction
The usage of random modulated radar signals was formally described in the year 1959 in [
1], often treated as the origin of noise radar technology (NRT). The authors of [
2] even trace back the concept of noise radar to an experiment performed in the year 1897. A general introduction and details on noise radar signal processing can be found in [
3].
Noise radar technology is well known for its main benefits which are its low probability of intercept (LPI) characteristics [
4], its inherent robustness against mutual interference [
5,
6], and its close-to ideal, thumbtack-like, ambiguity function (AF) [
7]. In the latter, neither range nor Doppler ambiguities exist and range-Doppler coupling is absent. This paper adds a new feature to the list of benefits. It is shown that a very precise determination of the velocity of a target may be performed on noise radar data even when the duration of the recording is too short to perform conventional Doppler analyses of the same precision. The work is structured as follows. The introduction continues with background information on conventional Doppler analyses and motivates potential applications for the presented processing scheme.
Section 2 defines a formalism to quantify the Doppler tolerance in noise radar, filling a current gap in the scientific literature. The new signal processing scheme for Doppler extraction in noise radar data is presented in
Section 3 and applied to experimental data in
Section 4 and
Section 5. Finally, a discussion of the achievements is given in
Section 6.
The investigation presented in this paper is a follow-on research based on the findings of [
8], a PhD thesis completed during doctoral studies at the University Tor Vergata of Rome, Italy, in cooperation with the German research institute Fraunhofer FHR.
1.1. Background
Radar signals are sensitive to the motion of the target and to the motion of the radar platform itself. The Doppler effect causes a frequency shift of the involved radio waves in dependency of the relative radial velocity
between the radar and the target. In many radar applications, the Doppler frequency
is assumed to be constant during the observation time and is approximated, neglecting relativistic effects, by
with
denoting the carrier frequency of the radar signal.
The historical principle [
9] to compensate for the Doppler shift of a radar echo uses a Doppler filter bank, that is, a bank of matched filters which are often tuned to equally spaced Doppler frequencies. In this early implementation, the matched filtered signals then were delivered to a decision network, which in [
9] is a “greatestof” signal selection. The Doppler filter bank principle was improved over the years leading to sophisticated designs such as [
10]. Digital signal processing has opened many occasions for strategies of Doppler analyses, used for the extraction of a target’s velocity information, and also for Doppler compensations.
To efficiently implement a digital Doppler filter bank, a Fast Fourier Transform (FFT) is applied to a series of range measurements. A detailed description can be found in ([
11], [ch.17]). The number of consecutive range measurements shall be denoted by
P which, together with the pulse repetition interval
of a conventional radar, forms the coherent processing interval of the FFT being
. The digital sampling rate of the resulting FFT is equal to the pulse repetition frequency
. This signal domain, which represents temporal variations of range measurements, is often referred to as the slow-time scale [
12]. A general design criterion of Doppler filters is given in ([
13], [ch.18]), stating that the bandwidth of each Doppler filter needs to span at least the frequency distance of the filters, a condition which is inherently met when the FFT is applied. The frequency resolution of the Doppler-FFT corresponds to the inverse of the coherent processing interval equal to
Moreover, the measurement of the Doppler frequency is ambiguous by multiples of the PRF [
14], unaffected by the value of
P.
In order to apply the method of Doppler filter banks to continuous radar signals, either for deterministic continuous wave (CW) radars like the well-known frequency modulated continuous wave (FMCW) or for CE noise radar, a functional equivalent to the PRI needs to be identified. For continuous radar signals, having a duty cycle of 100%, obviously, no pulses exist but the Doppler filter bank principle is directly applicable by segmenting the radar signal properly into slices of duration . The choice of depends on the waveform modulation. In an FMCW signal, for example, the segmentation ought to follow the periodic modulation: it practically covers a single frequency ramp in order to maintain the full signal bandwidth during each range measurement. But for the non-repetitive signals in continuous emission noise radar, the segment duration can be chosen freely: The continuous emission of noise radar is understood as an interruption-free non-repetitive modulation based on a random process of limited, constant bandwidth. The randomness of this modulation is non-repetitive and the full signal bandwidth B is covered in any segment that satisfies the requirement .
Consequently, in continuous emission radars, the interval of an FFT-based Doppler analysis may be formed by P segments, each of duration .
1.2. Motivation
The relationships described in
Section 1.1 indicate some important radar design criteria in the context of the extraction of velocity information from radar data:
- 1.
Precise Doppler measurements require long coherent integration intervals, see (
2)
- 2.
The higher the center frequency of the radar emission, the higher is the Doppler shift for a given radial velocity
, see (
1)
- 3.
The higher the center frequency, the shorter is the required coherent integration interval for a given precision of the velocity measurement
For these considerations, many Doppler radars operate at center frequencies of 10 GHz and above. As an example, the commercial Doppler radars of the company Blighter, used for ground surveillance and drone detection, operate in the Ku-band around 16 GHz [
15]. These high frequencies are usually applicable for short-range and medium-range applications. Common long-range radars, instead, operate in lower frequency bands such as marine navigation radars that transmit mostly S-band signals.
The following example illustrates the problems of accurate Doppler measurements with such a navigation radar set. The aimed velocity estimation shall be set to an accuracy of 1 knots, that is,
m/s, for a hypothetical S-band radar operating at a center frequency of
GHz. From (
1) results that the Doppler precision should not exceed a value of
Hz. This increment, according to (
2), defines the minimum coherent processing interval to
ms. But a strong discrepancy occurs when the minimum required value of
is compared to the typical design of long-range navigation radars such as the JMR-5472-S [
16]. With a typical beam width of
degrees and a rotation of the antenna at
revolutions per minute, a maximum
time-on-target of about 14 ms is achieved by such a radar set. This interval is much shorter than the minimum coherent processing interval required for the respective Doppler analysis. But the method presented later in this paper might solve this issue. The duration of the experimental data of
Section 4, deliberately limited to 12 ms, was chosen in agreement with the just made considerations.
Moreover, the Doppler extraction method presented in this paper is also considered as beneficial for modern agile multi-role radars that perform different tasks, enabled by a sophisticated resource management. One important resource is the illumination time, that is, the interval at which the antenna (which usually is a phased array antenna) of the multi-role radar is locked to a specific direction. The Doppler extraction procedure presented in this paper reduces the required time-on-target by a waveform-specific signal processing algorithm making use of the characteristic Doppler tolerance of a continuous emission noise radar. This is particularly important for phased array radar tracking applications [
17] which involve rapidly switched beam positions and demand for an efficient management of the revisit time and the time-on-target. The resource management becomes even harder when it comes to multi-function RF systems (MFRFS) that combine radar, electronic warfare and communication tasks by a single sensor [
18]. A general concept, of how these MFRFS might further benefit from the use of noise radar technology was presented in [
19].
2. Quantification of the Doppler Tolerance in CE Noise Radar
The general problem of Doppler tolerance in radar is discussed in the literature with different terminology. In 1966, the author of [
20] aimed for a waveform design with Doppler invariance by focusing on range-Doppler coupling. As the latter is absent in random waveforms, the approach presented in that paper is not applicable to noise radar technology. The problem of Doppler tolerance is also discussed in [
21,
22,
23], but the focus of these papers lies on transmitter code-design which contradicts the idea of randomness in noise radar emissions. The authors of [
24,
25] propose a combination of transmission wave design (Golay) combined with expensive phase compensations on receive. An idea, rejected for the same reason. Also in [
26], the achievement of Doppler invariance is used as the design criterion for specialized codes, still, that paper does not formally investigate the Doppler tolerance.
The most formal approach to Doppler tolerance of radar waveforms can be found in [
27] biased by an LFM signal background. But many aspects in [
27] can be easily ignored when focusing on noise radar: The particular shape of the ambiguity function of noise signals and the absence of range-Doppler coupling in noise radar allows for a description of the AF by two cuts [
7], one cut along the delay axis and a second cut along the Doppler axis.
In [
28], the Doppler tolerance of OFDM radar waveforms is formulated as a function of the number of carriers in the OFDM signal. The results are not directly applicable to CE noise radar but the paper formulates a general definition of a Doppler characterization by defining a loss-measure based on the ambiguity function. This approach inspired the, still different, procedure for characterizing the Doppler tolerance in CE noise radar of the current paper.
The ambiguity function [
29], more precisely the auto-ambiguity function, of a radar waveform
shall be denoted as
which defines a two-dimensional function in the delay-Doppler coordinate system. The ambiguity function for
forms the auto-correlation function (ACF) of the signal
with
Any concentration of energy located aside the origin of the delay-Doppler coordinate system in (
3) might cause ambiguous range-Doppler measurements in radar applications. This might potentially result in the extraction of wrong target parameters or even in false targets. But CE noise radar has an ambiguity function which is close to ideal as is shown in
Figure 1 representing an illustration of the thumbtack-shaped ambiguity function of an idealized noise waveform.
In real-world applications, restricted to the usage of band-limited and finite noise signals, the resulting ambiguity function still remains similar to the idealized AF shown in
Figure 1 but it does not form a two-dimensional Dirac function (also known as Kronecker Delta). Instead, the single peak in the origin of the delay-Doppler coordinate system has a certain spread in both dimensions and is of finite height. The peak height, characterised by the peak-to-average-sidelobe ratio, is determined by the time-bandwidth product of the waveform [
30]. The spread of the peak in the delay dimension defines the well-known range resolution and is caused by the finite signal bandwidth ([
31], [ch.9]). However, the spread in the Doppler dimension, along with its cause, is evaluated here in order to extract a measure for the Doppler tolerance of noise radar technology.
The matched filter output of a radar echo shows a particular signal-to-noise ratio (SNR), evaluated by common detection algorithms as presented in ([
32], [ch.2]). It is
where
denotes the signal power of the, in the frame of this paper matched filtered, radar echo and
denotes the power of the receiver noise, bounded below by the thermal noise.
The current paper proposes a quantification of the Doppler tolerance of CE noise radar by investigating the influence of the Doppler effect on the matched filtered signal power
. In this approach, the squared ambiguity function
, directly proportional to
, is used as the main indicator of the loss that a particular Doppler shift of an echo signal has on the resulting correlator output. As the current work focuses on CE noise radars, the following derivations make use of the characteristic thumbtack-like shape of its ambiguity function. These considerations lead to a loss function
, given by
with the maximum value of the ambiguity function always located at
.
The illustration of the ambiguity function in
Figure 1 emphasizes the absence of range-Doppler coupling in noise radar [
7] why, in this case, (
3) may be computed by
This independence of delay and Doppler in the ambiguity function of CE noise radar leads to the idea to fully characterize this Doppler tolerance by evaluating the zero-Delay cut (ZDC) of the AF, that is, .
Consequently, for CE noise radar, the indicator of the Doppler tolerance, defined in (
6), simplifies to
A threshold value of
is set that represents the “3 dB point” of the ambiguity function in the Doppler dimension. Consequently, a
cutoff-frequency shall be defined as
In the following, the cutoff-frequency is investigated by evaluating the respective zero-delay cut of the ambiguity function depending on the matched filter duration.
In noise radar technology, the emitted signal
is often assumed to be the realization of a Gaussian or at least of an ergodic random process. The echo of a target located in a particular distance
D and moving with a radial velocity
forms a received signal
which is a delayed and Doppler-shifted copy of the transmitted signal
attenuated by a factor
A that mainly depends on the range and the size of the target. The term
was defined in (
1). A range measurement can be performed by computing the cross-correlation of the received signal and the transmitted signal, in other words by a matched filter process. But any practical computation of the matched filter has a finite duration which requires a segmentation of the continuous noise signals
and
to finite signals
and
.
In general, the segmentation procedure of a noise radar waveform can be modelled by an appropriate window function
from which a signal,
is computed with
representing a realization of a white Gaussian process filtered to a 3 dB bandwidth equal to
B. A specific window function is presented later in this section.
From the definition of the ambiguity function, given in (
3), it follows that for
the phase of the waveform
has no influence on the zero-delay cut
. The relationship of the waveform
on the ZDC of the coherent AF can be expressed in compact form [
14] by
with
denoting the Fourier transform ([
33], [ch.2]), which for a signal
is
From (
11) and (
12) follows that the zero-delay cut of the resulting ambiguity function of
is computed by a convolution (the symbol is: * ) to
For
, the convolution in (
14) may be approximated by
A detailed derivation of this approximation can be found in [
34]. Equation (
15) indicates that the Doppler tolerance in noise radar is mainly influenced by the shape of the window function
and quantified as follows.
For a simple segmentation of the waveform
into slices of duration
, a rectangular window,
is implicitly applied by the segmentation procedure leading to a signal
for which the Doppler tolerance is computed in this section.
Figure 2 illustrates the signal model of
, created from a noise source
that, idealized, is assumed to have a Gaussian distribution.
For a rectangular window function, as defined in (
16), it is
and, thus, the resulting gain of the respective matched filter process is equal to
with B denoting the bandwidth of the signal
.
The equation stated in (
15) stresses out that the Doppler behaviour of the ambiguity function of the particular noise waveform defined in (
11) is dominated by the shape of the window function
. The normalization in (
8) and the fact that
in (
15) lead to the following formulation of the Doppler-sensitive loss function of the signal
. It is
where
represents the duration of the rectangular window, defined in (
16). This Doppler-behaviour is illustrated in
Figure 3.
Equation (
19) describes a symmetrical function and, thus, only the positive Doppler axis is drawn in
Figure 3. The dotted red line indicates the position of the cutoff Doppler frequency, achieved by applying the rule of (
9) to (
19) and resulting in
The subscript
r indicates the relationship of this Doppler tolerance rule to the particular shape of the rectangular window function of the noise signal
as defined in (
16) and (
17).
Impact on Noise Radar Implementations
The interpretation of (
20) leads to the general statement that the longer the matched filter duration
the narrower is the main peak of the function
, as
for
. Therefore, all noise radar applications that use long signal segments for the range-correlation have to cope with a resulting limited Doppler tolerance illustrated by the following example.
An X-band radar is considered whose parameters are roughly compliant with the demonstrator used in
Section 4 and comparable to small marine navigation radars such as [
35]. The radar emission is assumed to be restricted, for example by regulations or hardware limitations, to a bandwidth of 50 MHz around a center frequency of 10 GHz. Thus, for an LPI application, any reduction of the emitted power whilst maintaining a certain aimed signal-to-noise ratio for a given task can only be accomplished by utilizing a long processing interval. For example, a radar pulse of
s duration and 1 kW peak power might be replaced by a noise signal of the same bandwidth but with 1 W peak power and 1 ms duration. Without going into the details of any actual radar task, a coherent processing interval of
ms shall be considered favourable for the noise radar in this paragraph leading to a maximum coherent processing gain of
dB. According to (
20), this value of
would result in a Doppler cutoff frequency of
Hz.
Table 1 illustrates the Doppler tolerance of this particular radar implementation with respect to common radar targets moving at typical velocities. The slowest target, a sailing boat given in the first line of
Table 1, is the only target that is compliant with the Doppler tolerance requirement of
. For all the other targets, either a cost-intense Doppler compensation needs to be performed or the coherent processing interval, that is, the segment duration, needs to be shortened to a value
, presented in the last column of the table, with the consequence of a reduced achievable processing gain. The duration
, derived from (
20), is interpreted as the
Doppler-tolerant segment duration.
However, for many applications, especially with LPI background, the coherent processing interval needs to have a certain duration according to the requirements on the processing gain. If the maximum expected Doppler frequency exceeds the , then a computationally intense Doppler compensation becomes essential in noise radar even in cases at which the extraction of the target velocity is not required.
This fact might be considered as a drawback of noise radars but for those applications that indeed ask for Doppler information of the targets, the Doppler sensitivity of noise radar provides an advantageous opportunity that is presented in the next sections including a set-up of two road vehicles for an experimental proof of this idea.
3. Signal Processing Method for a Precise Velocity Extraction
This section presents a processing scheme utilizing the Doppler sensitivity, the absence of range-Doppler coupling in noise radar and the fact that for
the signal bandwidth
B of a (pseudo-)random signal is not affected by the segment duration
. This method reads the functional relationship of (
19) in a different light. The deep nulls of the sinc-shaped Doppler-dependency allow for a precise evaluation of the Doppler frequency as the zero points of this function occur at positions for which
holds true. In
Section 2,
was considered as a fixed value and (
19) was computed for different values of
in order to characterize the Doppler tolerance of a given matched filter implementation in noise radar.
The idea, here, is to find an unknown Doppler frequency by evaluating the output of multiple matched filter processes, each having a different duration
T, that are applied to an identical set of data. However, a variation of the matched filter length also influences the processing gain (
18) where
has to be evaluated. In noise radars, the bandwidth
B is constant in all those segments of reasonable duration, as discussed above. Thus, it is only the variation in the matched filter duration which has to be compensated for. This implies the appropriately normalized function
Equation (
22) describes the matched filter procedure of a signal
with the replica signal
for a single delay value
but different matched filter durations
T. The delay value
corresponds to the distance
D of a previously detected target whose velocity information shall be extracted. The term
c denotes the speed of light.
But a major difference between the functions of (
22) and (
19) exists for small input values. When
, the relation of (
19) converges to unity, whereas for
the relation of (
22) converges to zero. For this reason, the method of Doppler frequency extraction evaluates the distance between subsequent zero points from which the Doppler frequency of the target can be extracted as follows. For any two subsequent zero points with indices
n and
it is
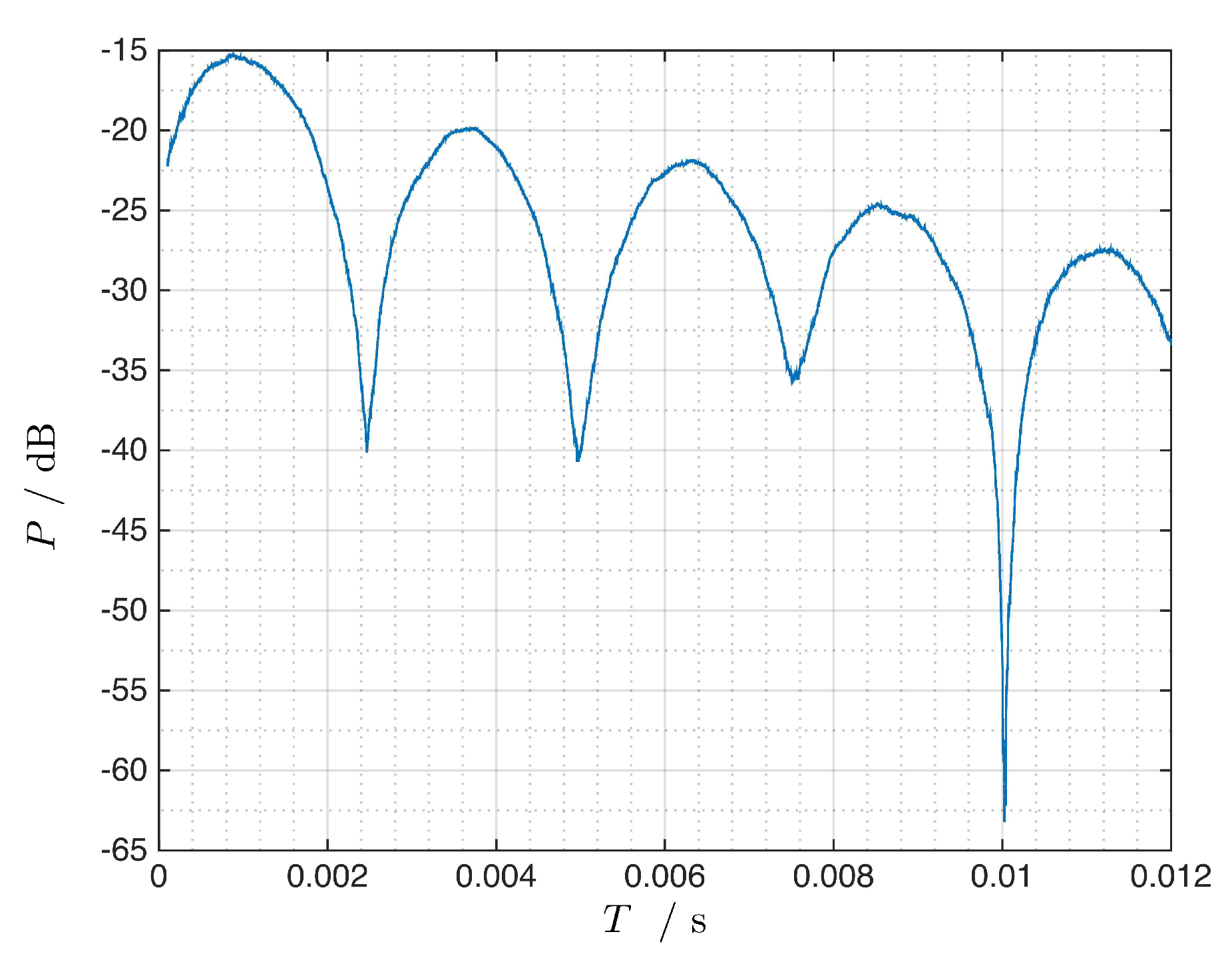
and therefore,
Figure 4 illustrates the Doppler extraction algorithm at which a section of duration
of the continuous noise signals is extracted to a buffer and evaluated by a series of
K matched filters of different durations
. It is assumed that the maximum available matched filter durations is limited to
with
representing the maximum available segment duration of the signals. The rate of the parameter T and the power of the echo signal mainly influence the depth of the zero positions in the function
from which, as a last step in the schematic, the Doppler frequency of the target at a given distance
D is extracted. In practical applications, the zero-points are indicated by local minima of (
22) instead of exact zero values.
The method only requires that the target needs to be the sole Doppler-shifted echo in its range cell. Static echoes like stationary clutter are expected to limit the depth of the local minima of (
22) which is less damaging to the evaluation method as would be two significantly different Doppler modulations in the same range-cell, a situation being quite unlikely to endure for a longer period.
Section 4 presents an experiment creating suitable data to test the described signal processing method. The scheme is particularly suitable for (pseudo-)random signals where the signal bandwidth is not affected by the choice of the segment duration. It is important to emphasize again that the different matched filters, applied in this method, use the same set of data.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}