

A Two-Dimensional Liquid Sloshing Analysis in a Partially Filled Complicated-Shape Tank by the Schwarz–Christoffel Transformation


Abstract
1. Introduction
2. Materials and Methods
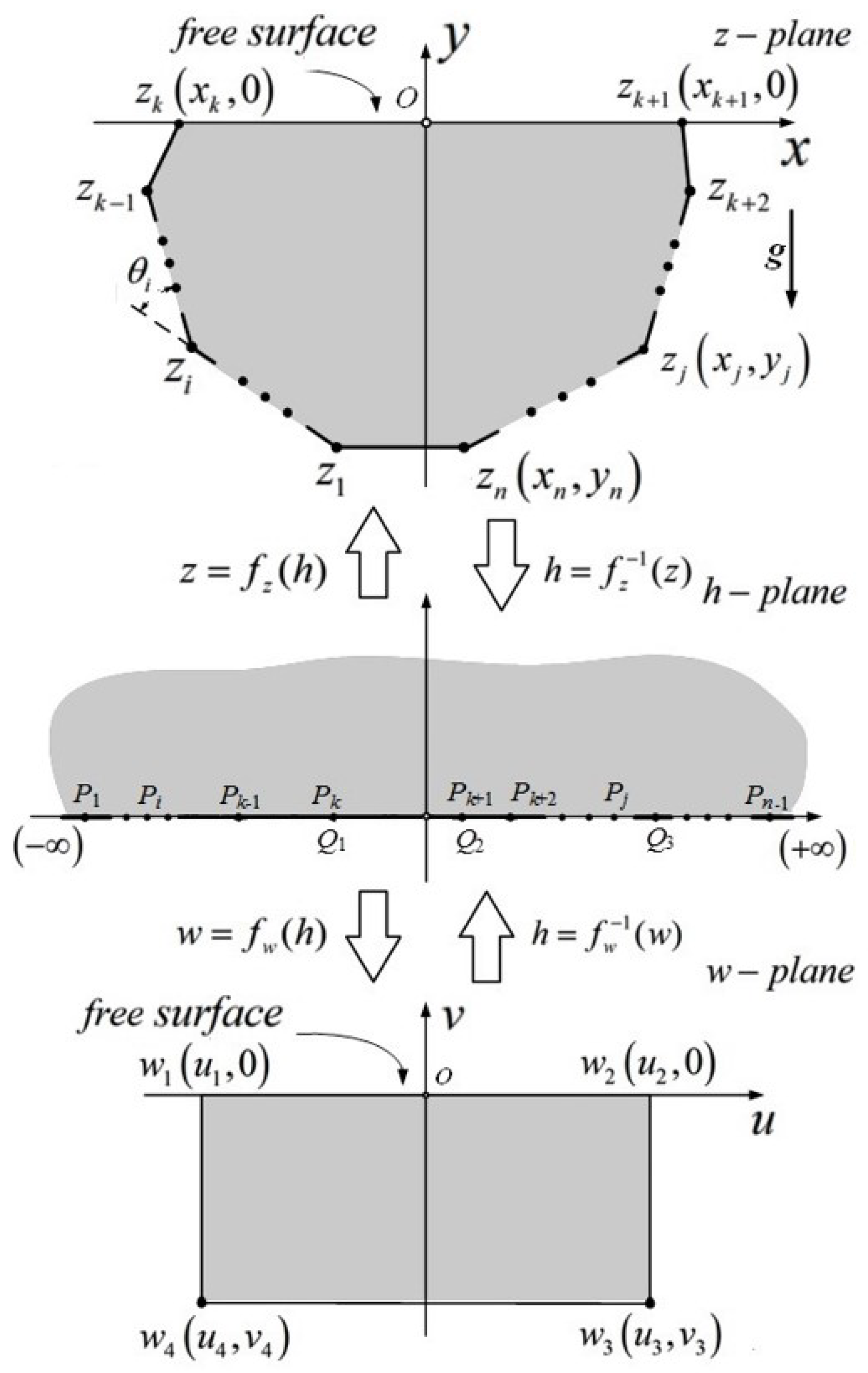
2.1. Analytical Mapping Function
2.2. Velocity Potential and Wave Height Functions
3. Results
3.1. Nonlinear System Model
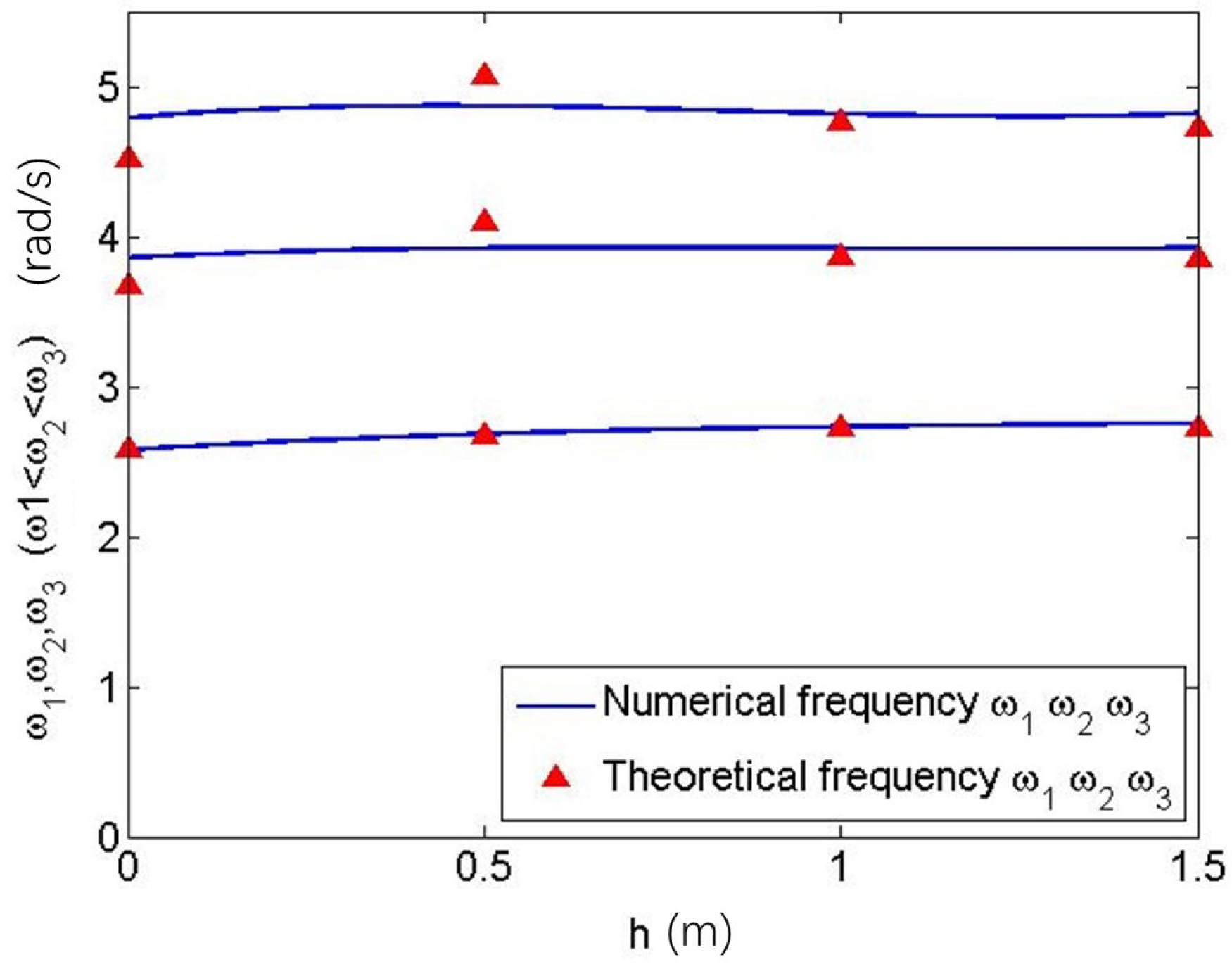
3.2. Natural Frequencies
3.2.1. Natural Frequencies of Liquid Sloshing
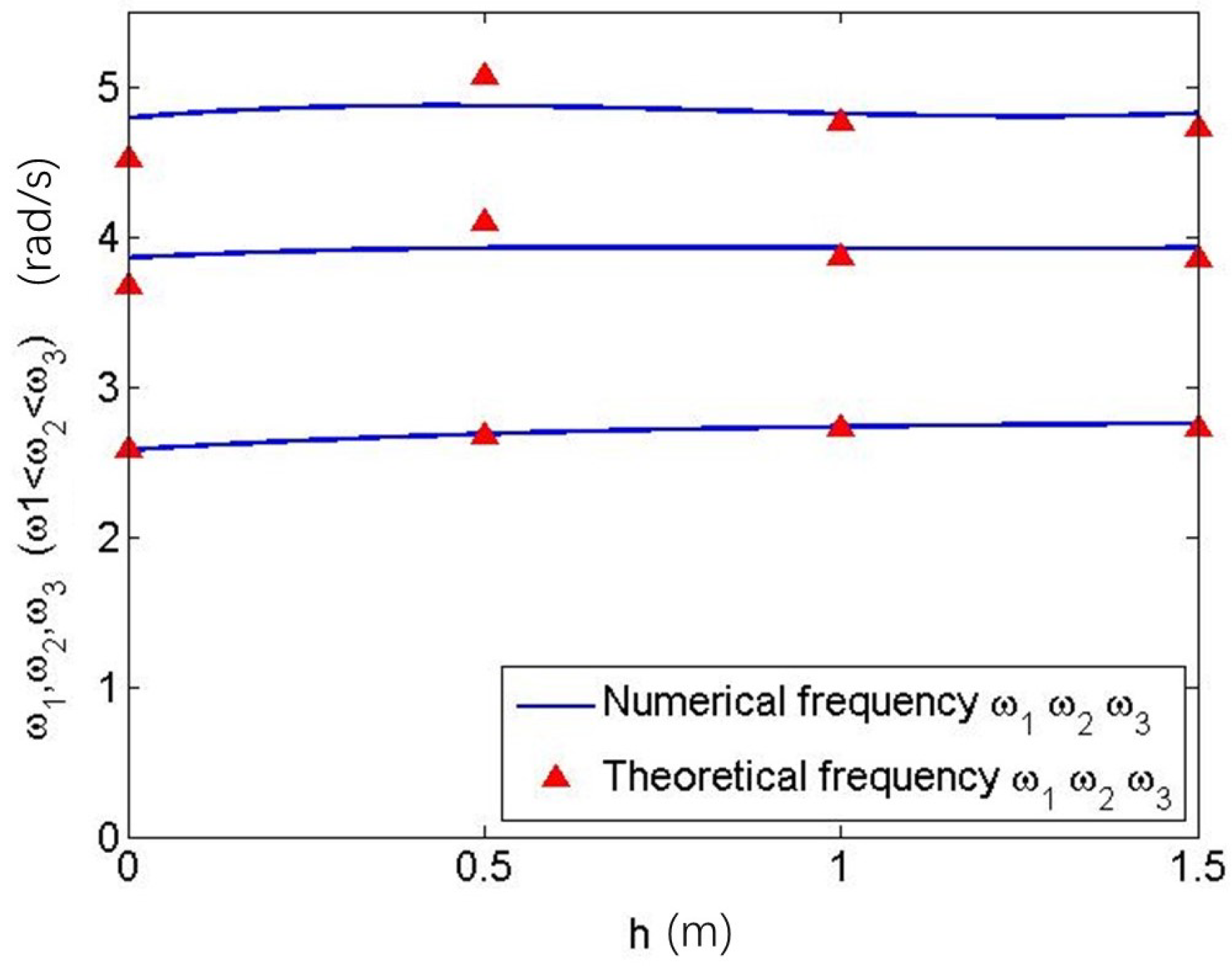
3.2.2. Natural Frequencies of the Fluid–Structure Coupled System
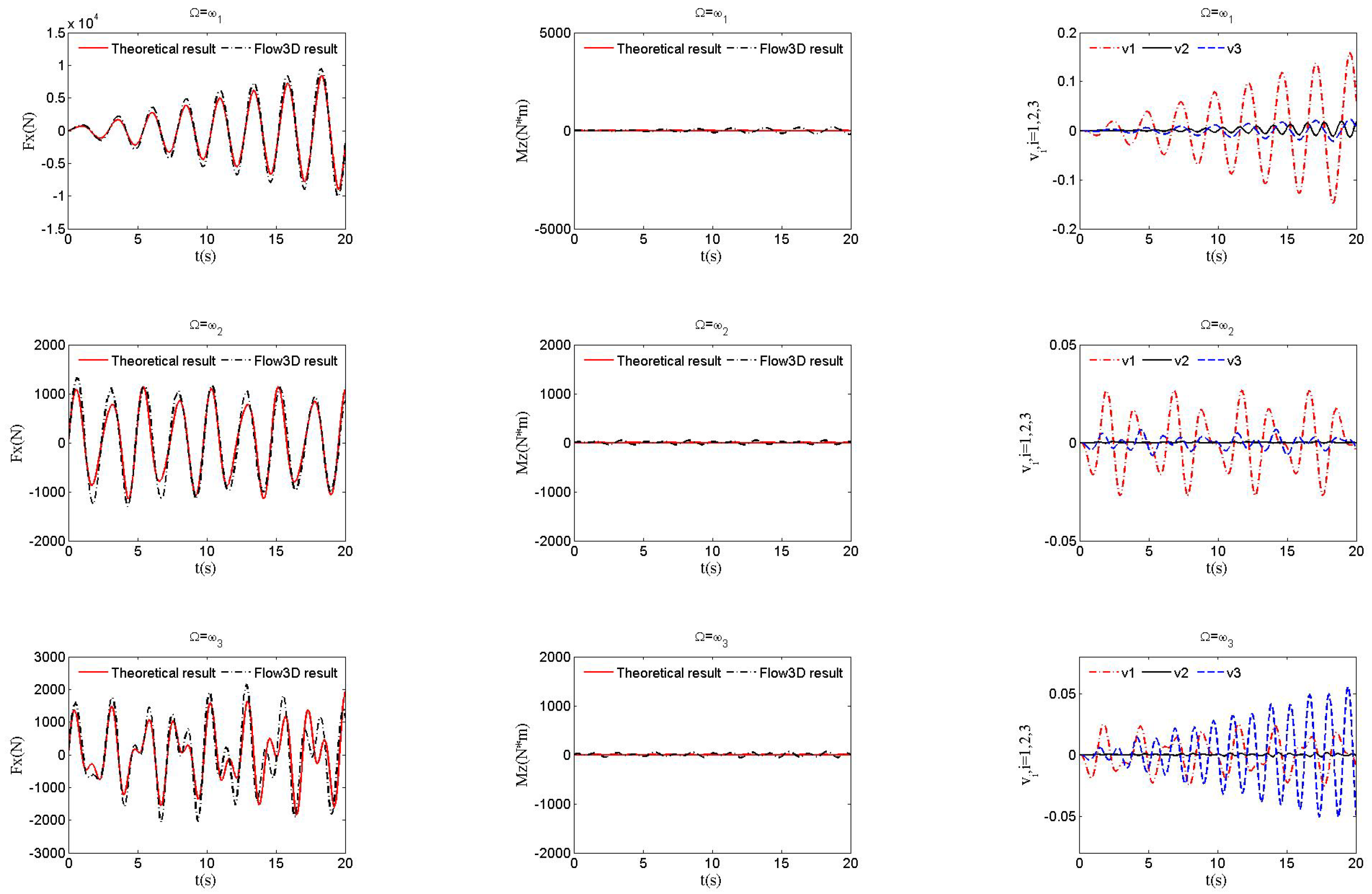
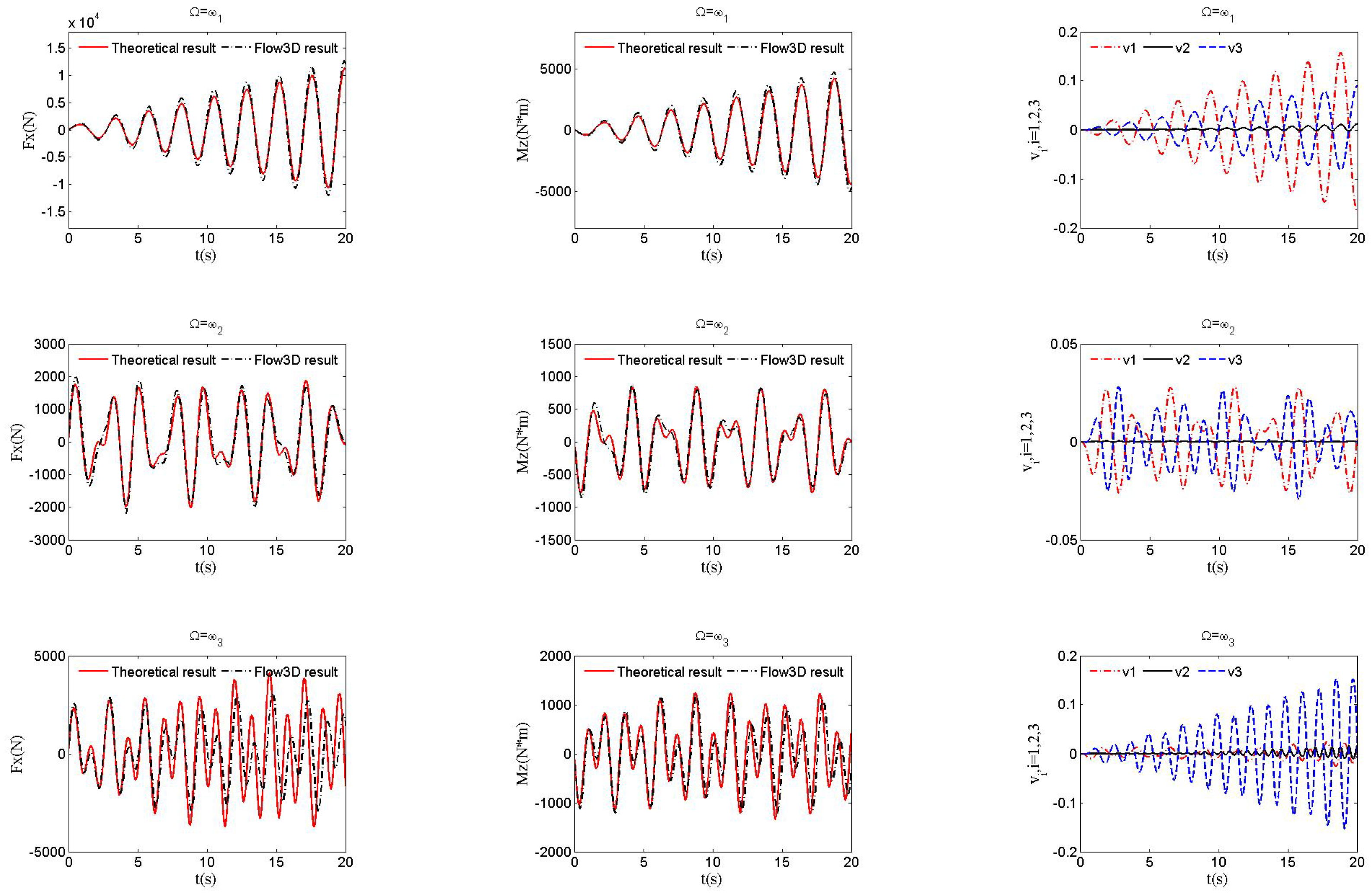
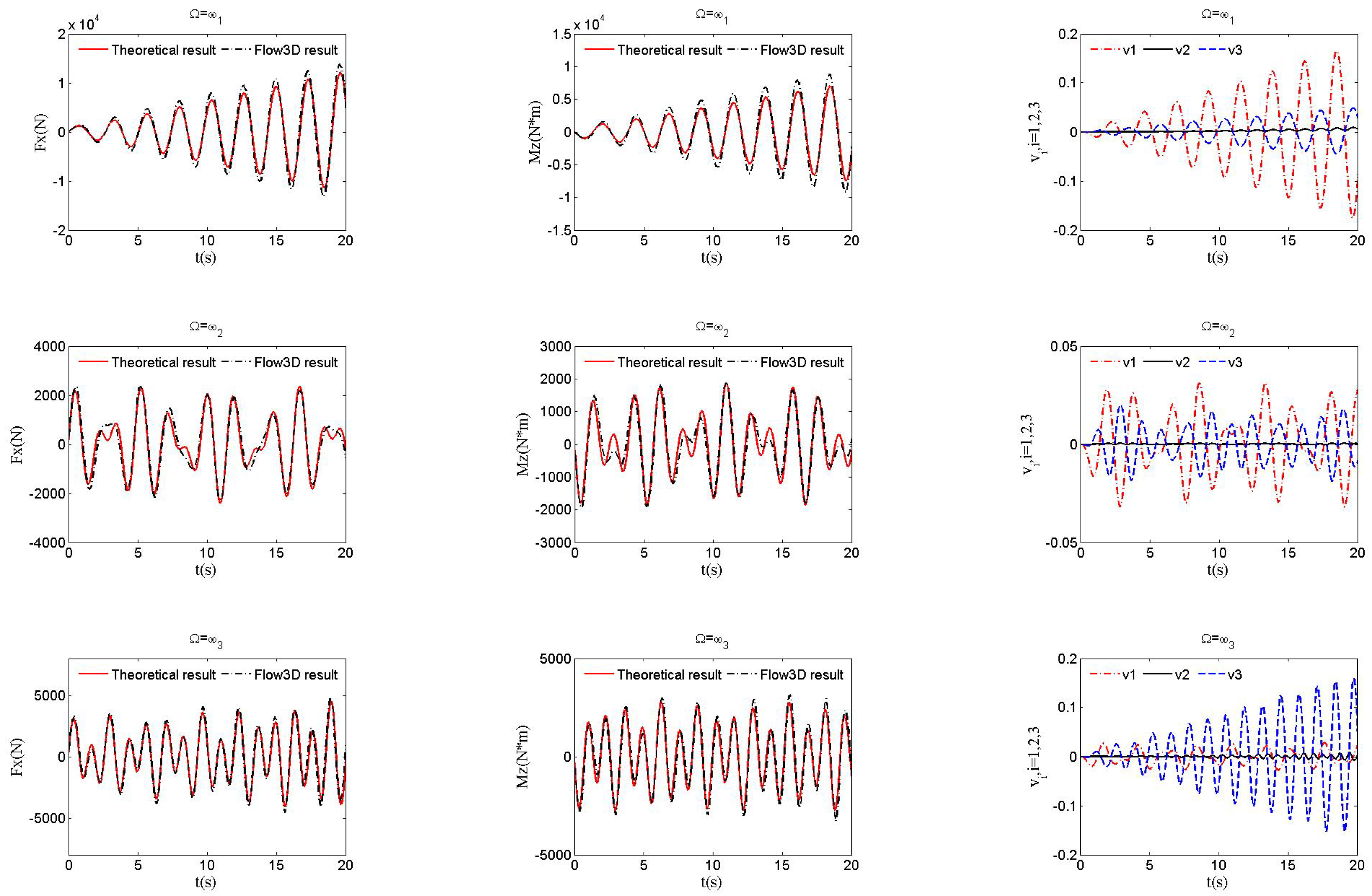
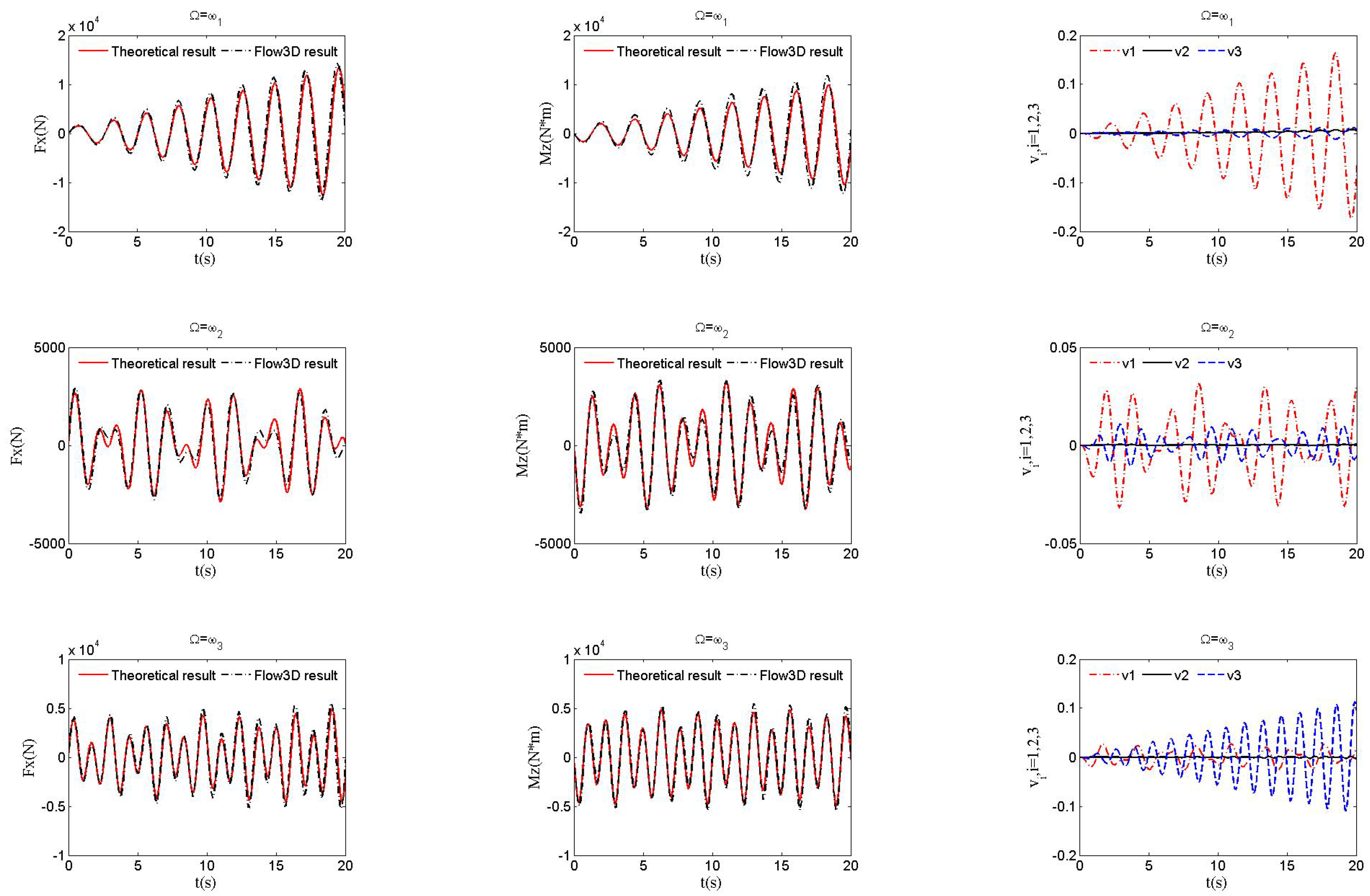
3.3. Slosh Forces and Moments
4. Discussion
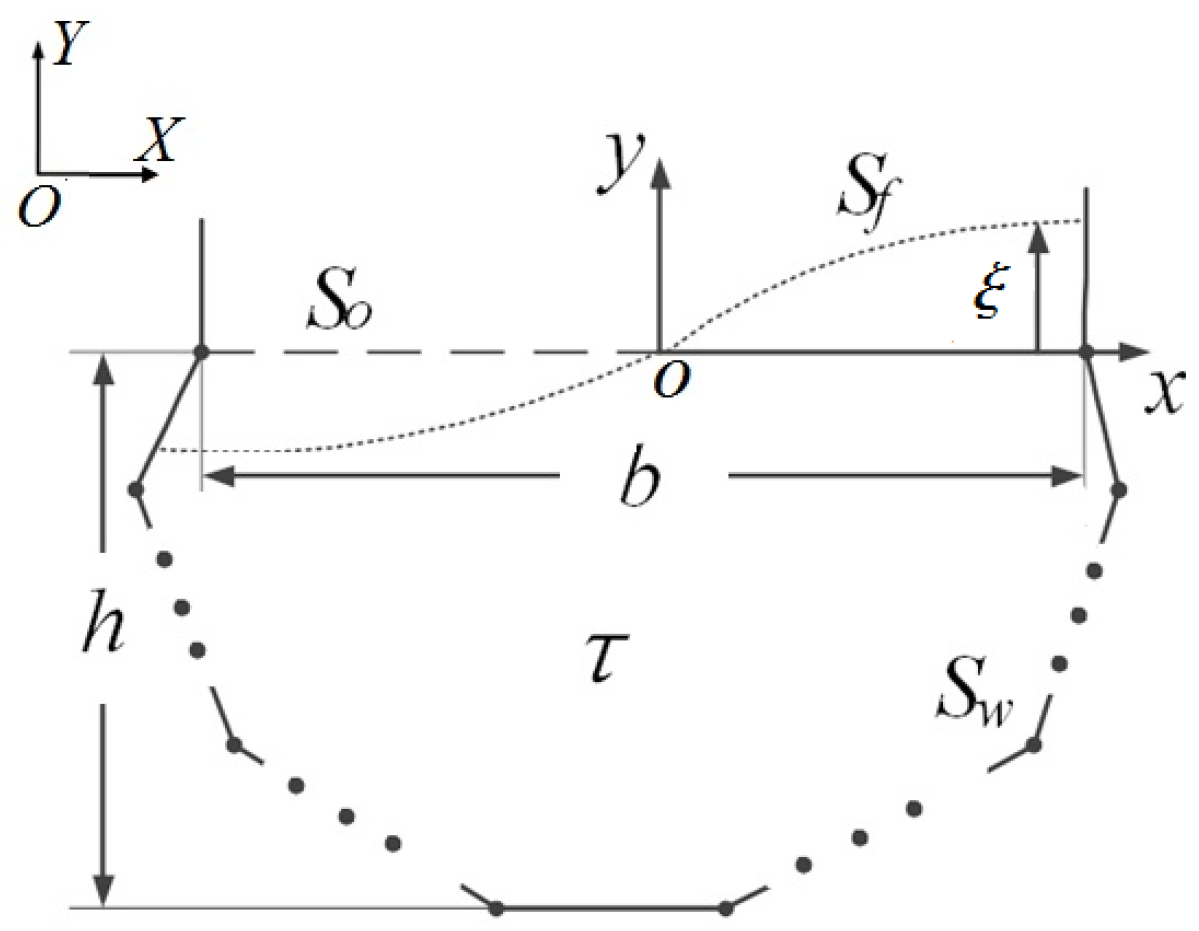
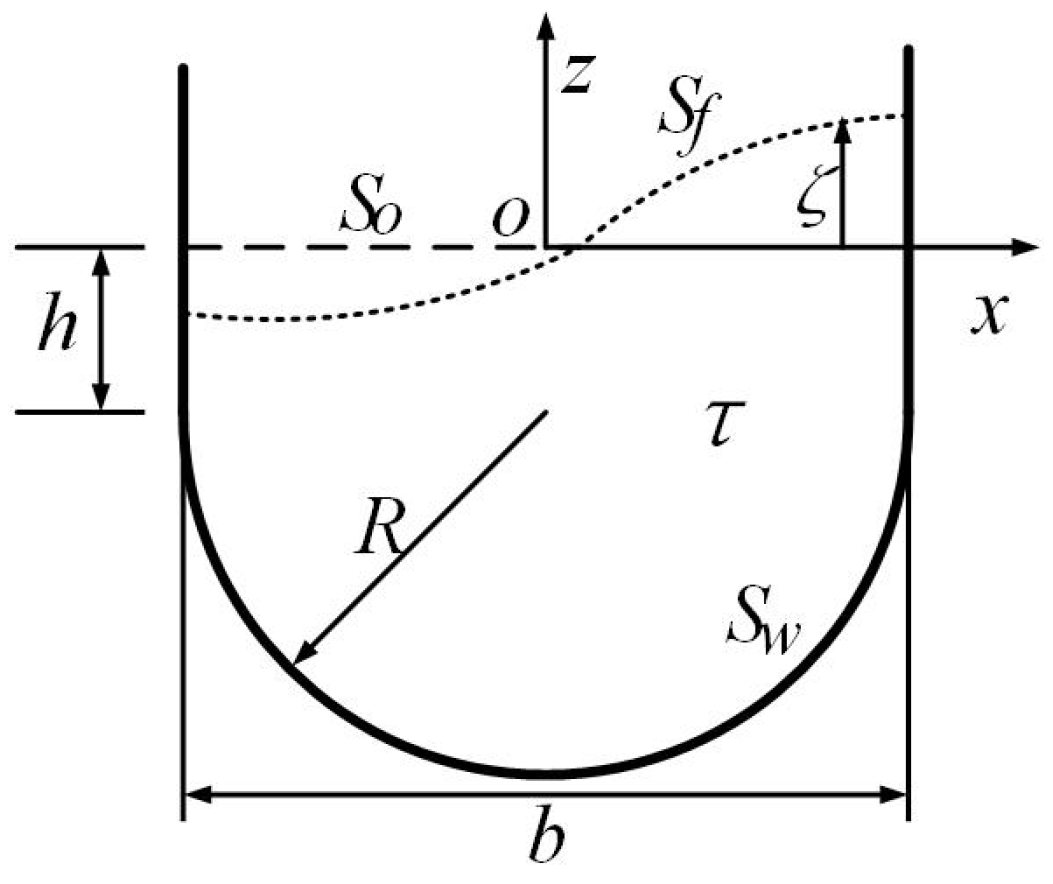
4.1. Approximate Mapping Function
4.2. Analysis and Comparison
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
Appendix B

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| h | ||||||
|---|---|---|---|---|---|---|
| 0 | 1.012 | 0.136 | −0.011 | 0.020 | −0.090 | 0.063 |
| 0.5 | 0.814 | −0.263 | 0.045 | −0.429 | −0.003 | −0.101 |
| 1 | 0.903 | −0.135 | 0.019 | −0.194 | −0.018 | −0.025 |
| 1.5 | 0.957 | −0.033 | 0.006 | −0.052 | −0.019 | 0.007 |
| h | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| 0 | −0.053 | 0.955 | −0.009 | −0.990 | −0.012 | −0.846 | 0.007 | −0.173 | −0.198 |
| 0.5 | −0.010 | 0.539 | 0.082 | −0.839 | 0.279 | −0.566 | −0.011 | 0.067 | −0.109 |
| 1 | −0.088 | 0.810 | 0.064 | −0.516 | 0.121 | −0.294 | −0.009 | −0.007 | −0.044 |
| 1.5 | −0.061 | 0.941 | 0.046 | −0.230 | 0.035 | −0.109 | −0.009 | −0.025 | −0.011 |
References
- Abramson, H.N. The Dynamic Behavior of Liquids in Moving Containers; NASA SP 106; NASA: Washington, DC, USA, 1966.
- Ibrahim, R.A. Liquid Sloshing Dynamics: Theory and Applications; Cambridge University Press: Cambridge, UK, 2005. [Google Scholar]
- Seyyed, M.H. Liquid Sloshing in half-full horizontal elliptical tanks. J. Sound Vib. 2009, 324, 332–349. [Google Scholar]
- Ken, H. Lessons from the 2003 Tokachi-oki, Japan, earthquake for prediction of long-period strong ground motions and sloshing damage to oil storage tanks. J. Seismol. 2008, 12, 255–263. [Google Scholar]
- Volkan, O.; Emanuele, B.; Roberto, N. Earthquake-induced nonlinear sloshing response of above-ground steel tanks with damped or undamped floating roof. Soil Dyn. Earthq. Eng. 2021, 144, 106673. [Google Scholar]
- Faltinsen, O.M.; Rognebakke, O.F.; Lukovsky, I.A.; Timokha, A.N. Multidimensional modal analysis of nonlinear sloshing in a rectangular tank with finite water depth. J. Fluid Mech. 2000, 407, 201–234. [Google Scholar] [CrossRef]
- Faltinsen, O.M.; Rognebakke, O.F.; Timokha, A.N. Resonant three-dimensional nonlinear sloshing in a square-base basin analysis of nonlinear sloshing in a rectangular tank. J. Fluid Mech. 2003, 487, 1–42. [Google Scholar] [CrossRef]
- Takashi, I. Autoparametric resonances in elastic structures carrying two rectangular tanks partially filled with liquid. J. Sound Vib. 2007, 302, 657–682. [Google Scholar]
- Takashi, I.; Yuji, H.; Takefumi, O. Internal resonance of nonlinear sloshing in rectangular liquid tanks subjected to obliquely horizontal excitation. J. Sound Vib. 2016, 361, 210–225. [Google Scholar]
- Miles, J.W. Internally resonant surface waves in a circular cylinder. J. Fluid Mech. 1984, 149, 1–14. [Google Scholar] [CrossRef]
- McIver, P. Sloshing frequencies for cylindrical and spherical containers filled to an arbitrary depth. J. Fluid Mech. 1989, 201, 243–257. [Google Scholar] [CrossRef]
- Utsumi, M.A. Mechanical Model for Low-Gravity Sloshing in an Axisymmetric Tank. J. Appl. Mech. 2004, 71, 724–730. [Google Scholar] [CrossRef]
- Yue, B.Z. Coupling Frequency of the Liquid Sloshing in a Cylindrical Tank with a Flexible Baffle. J. Beijing Inst. Technol. 2006, 15, 1–4. [Google Scholar]
- He, Y.J.; Ma, X.R.; Wang, P.P.; Wang, B.L. Low-gravity liquid nonlinear sloshing analysis in a tank under pitching excitation. J. Sound Vib. 2007, 299, 164–177. [Google Scholar]
- Hiroki, T.; Koji, K. Frequency response of sloshing in an annular cylindrical tank subjected to pitching excitation. J. Sound Vib. 2012, 331, 3199–3212. [Google Scholar]
- Budiansky, B. Sloshing of liquids in circular canals and spherical tanks. J. Aero/Space Sci. 1960, 27, 161–172. [Google Scholar] [CrossRef]
- Chu, W.H. Liquid sloshing in a spherical tank filled to an arbitrary depth. AIAA J. 1964, 2, 1972–1979. [Google Scholar] [CrossRef]
- Fox, D.W.; Kuttler, J.R. Sloshing frequencies. J. Appl. Math. Phys. 1983, 34, 668–696. [Google Scholar] [CrossRef]
- Seyyed, M.H.; Mostafa, A. Transient sloshing in half-full horizontal elliptical tanks under lateral excitation. J. Sound Vib. 2011, 330, 3507–3525. [Google Scholar]
- Faltisen, O.M.; Timokha, A.N. A multimodal method for liquid sloshing in a two-dimensional circular tank. J. Fluid Mech. 2010, 665, 457–479. [Google Scholar] [CrossRef]
- Faltisen, O.M.; Timokha, A.N. Multimodal analysis of weakly nonlinear sloshing in a spherical tank. J. Fluid Mech. 2013, 665, 457–479. [Google Scholar]
- Bauer, H.F. Sloshing in conical tanks. Acta Mech. 1982, 43, 185–200. [Google Scholar] [CrossRef]
- Gavrilyuk, I.; Lukovsky, I.A.; Timokha, A.N. Nonlinear sloshing in a circular conical tank. Hybrid Methods Eng. 2001, 3, 1–39. [Google Scholar] [CrossRef]
- Lukovskii, I.A.; Timokha, A.N. Modal modeling of nonlinear fluid sloshing in tanks with non-vertical walls: Non-conformal mapping technique. Int. J. Fluid Mech. Res. 2002, 29, 216–242. [Google Scholar]
- Chen, S.; Johnson, D.B.; Paad, P.E. Velocity boundary conditions for the simulation of free surface fluid flow. J. Comput. Phys. 1995, 116, 262–276. [Google Scholar] [CrossRef]
- Yang, H.; West, J. Validation of high-resolution CFD method for slosh damping extraction of baffled tanks. In Proceedings of the 52nd AIAA/SAE/ASEE Joint Propulsion Conference, Salt Lake City, UT, USA, 25–27 July 2016. AIAA Paper 2016-4587. [Google Scholar]
- Bass, R.L.; Bowels, E.B.; Endo, S.; Pots, B. Modeling criteria for scaled LNG sloshing experiments. J. Fluids Eng. 1985, 107, 272–280. [Google Scholar] [CrossRef]
- Hung, R.J.; Long, Y.T. Dynamical Models for Sloshing Dynamics of Helium II under Low-G Conditions; NASA-CR-203845; NASA: Washington, DC, USA, 1997.
- Takashi, N. ALE finite element computations of fluid-structure interaction problems. Comput. Methods Appl. Mech. Eng. 1994, 112, 291–308. [Google Scholar] [CrossRef]
- Liu, M.B.; Liu, G.R. Smoothed Particle Hydrodynamics (SPH): An overview and recent developments. Arch. Comput. Methods Eng. 2010, 17, 25–76. [Google Scholar] [CrossRef]
- Yu, Q.; Wang, T.; Li, Z. Rapid simulation of 3D liquid sloshing in the lunar soft-landing spacecraft. AIAA J. 2019, 57, 4504–4513. [Google Scholar] [CrossRef]
- Vanyo, J.P. Rotating Fluids in Engineering and Science; Butterworth-Heinemann: Boston, MA, USA, 1993. [Google Scholar]
- Nichkawde, C.; Harish, P.M.; Ananthkrishnan, N. Stability analysis of a multibody system model for coupled slosh-vehicle dynamics. J. Sound Vib. 2004, 275, 1069–1083. [Google Scholar] [CrossRef]
- Gou, X.Y.; Li, T.S.; Ma, X.R.; Wang, B.L. Forces and moments of the liquid finite amplitude sloshing in a liquid-solid coupled system. Appl. Math. Mech. 2001, 22, 528–540. [Google Scholar] [CrossRef]
- Lü, J.; Li, J.F.; Wang, T.S. Dynamic Response of a liquid-filled rectangular tank with elastic appendages under pitching excitation. Appl. Math. Mech. 2007, 28, 351–359. [Google Scholar] [CrossRef]
- Yue, B.Z. Nonlinear coupled dynamics of liquid-filled spherical container in microgravity. Appl. Math. Mech. 2008, 29, 1085–1092. [Google Scholar] [CrossRef]
- Saff, E.B.; Snider, A.D. Fundamentals of Complex Analysis with Applications to Engineering and Science; Prentice Hall: Hoboken, NJ, USA, 2007. [Google Scholar]
| h (m) | Frequencies for Liquid Sloshing (rad/s) | Frequencies for Coupled System (rad/s) | ||||
|---|---|---|---|---|---|---|
| 1st Order | 2nd Order | 3rd Order | 1st Order | 2nd Order | 3rd Order | |
| 0 | ||||||
| 1 | ||||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lü, J.; Zhu, X.; Yu, Y. A Two-Dimensional Liquid Sloshing Analysis in a Partially Filled Complicated-Shape Tank by the Schwarz–Christoffel Transformation. Acoustics 2024, 6, 346-361. https://doi.org/10.3390/acoustics6020018
Lü J, Zhu X, Yu Y. A Two-Dimensional Liquid Sloshing Analysis in a Partially Filled Complicated-Shape Tank by the Schwarz–Christoffel Transformation. Acoustics. 2024; 6(2):346-361. https://doi.org/10.3390/acoustics6020018
Chicago/Turabian StyleLü, Jing, Xiaolong Zhu, and Yang Yu. 2024. "A Two-Dimensional Liquid Sloshing Analysis in a Partially Filled Complicated-Shape Tank by the Schwarz–Christoffel Transformation" Acoustics 6, no. 2: 346-361. https://doi.org/10.3390/acoustics6020018
APA StyleLü, J., Zhu, X., & Yu, Y. (2024). A Two-Dimensional Liquid Sloshing Analysis in a Partially Filled Complicated-Shape Tank by the Schwarz–Christoffel Transformation. Acoustics, 6(2), 346-361. https://doi.org/10.3390/acoustics6020018