
Fast Evaluations of Integrals in the Ffowcs Williams–Hawkings Formulation in Aeroacoustics via the Fast Multipole Method



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Formulations
2.1. IDDES Model
2.2. FW-H Acoustic Analogy
2.3. Fast Multipole Method
2.3.1. Fast MSFW-H Method
2.3.2. Fast DSFW-H Method
3. Numerical Examples and Verification
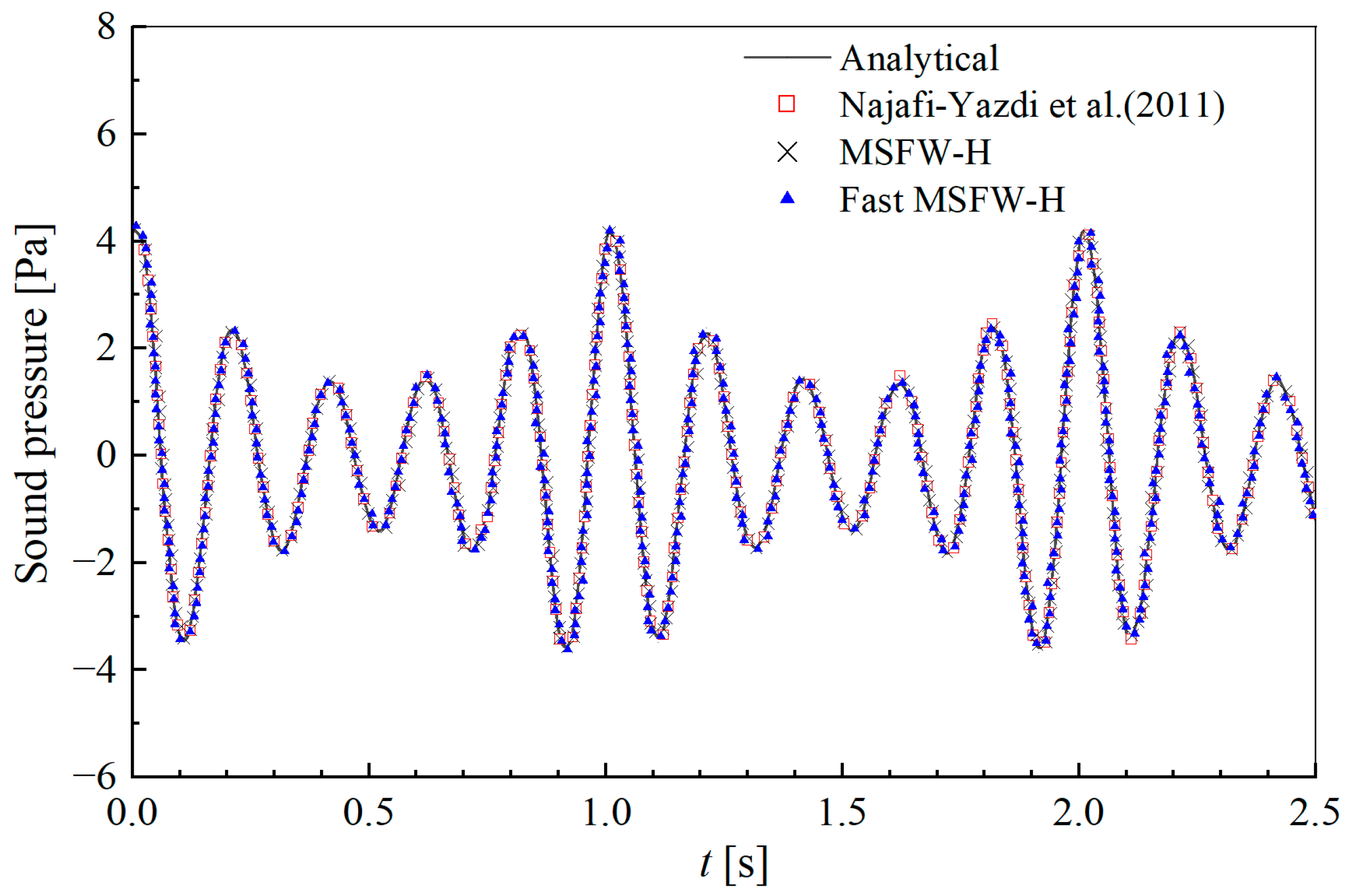
3.1. Test Case 1: A Stationary Acoustic Monopole in a Uniform Flow
3.2. Test Case 2: A Rotating Acoustic Monopole in a Uniform Flow
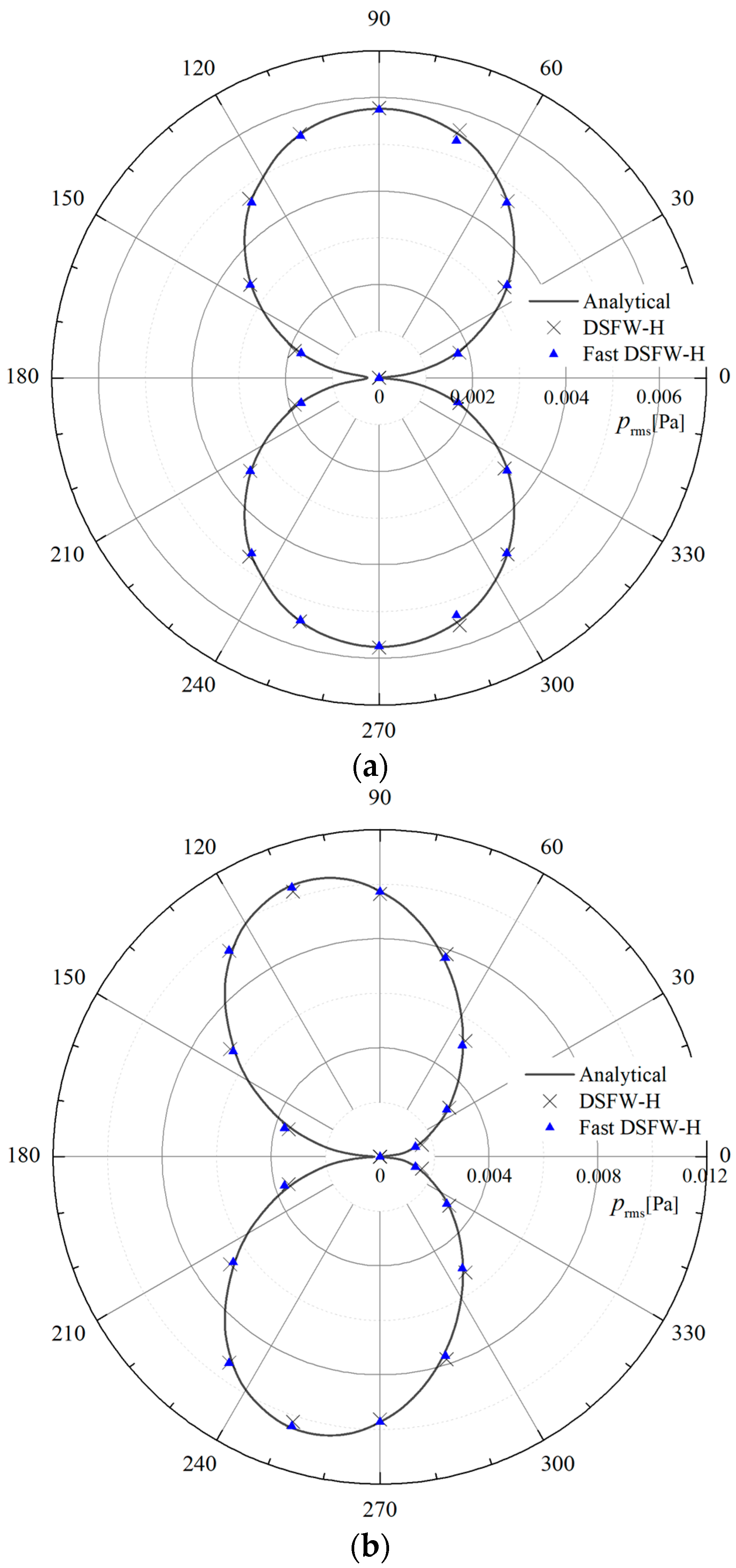
3.3. Test Case 3: A Stationary Point Dipole in a Moving Medium
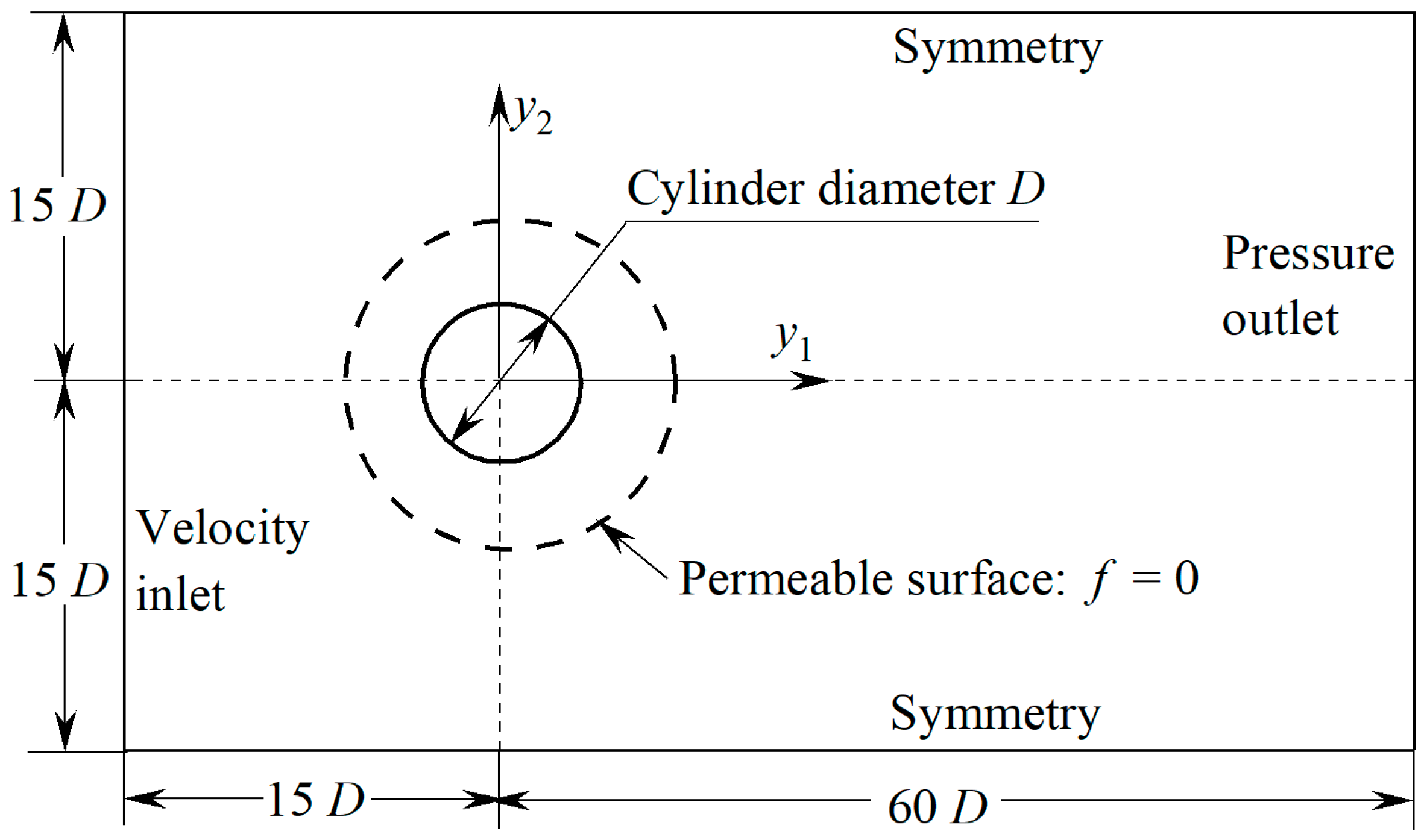
4. Applications to a Circular Cylinder in a Uniform Flow
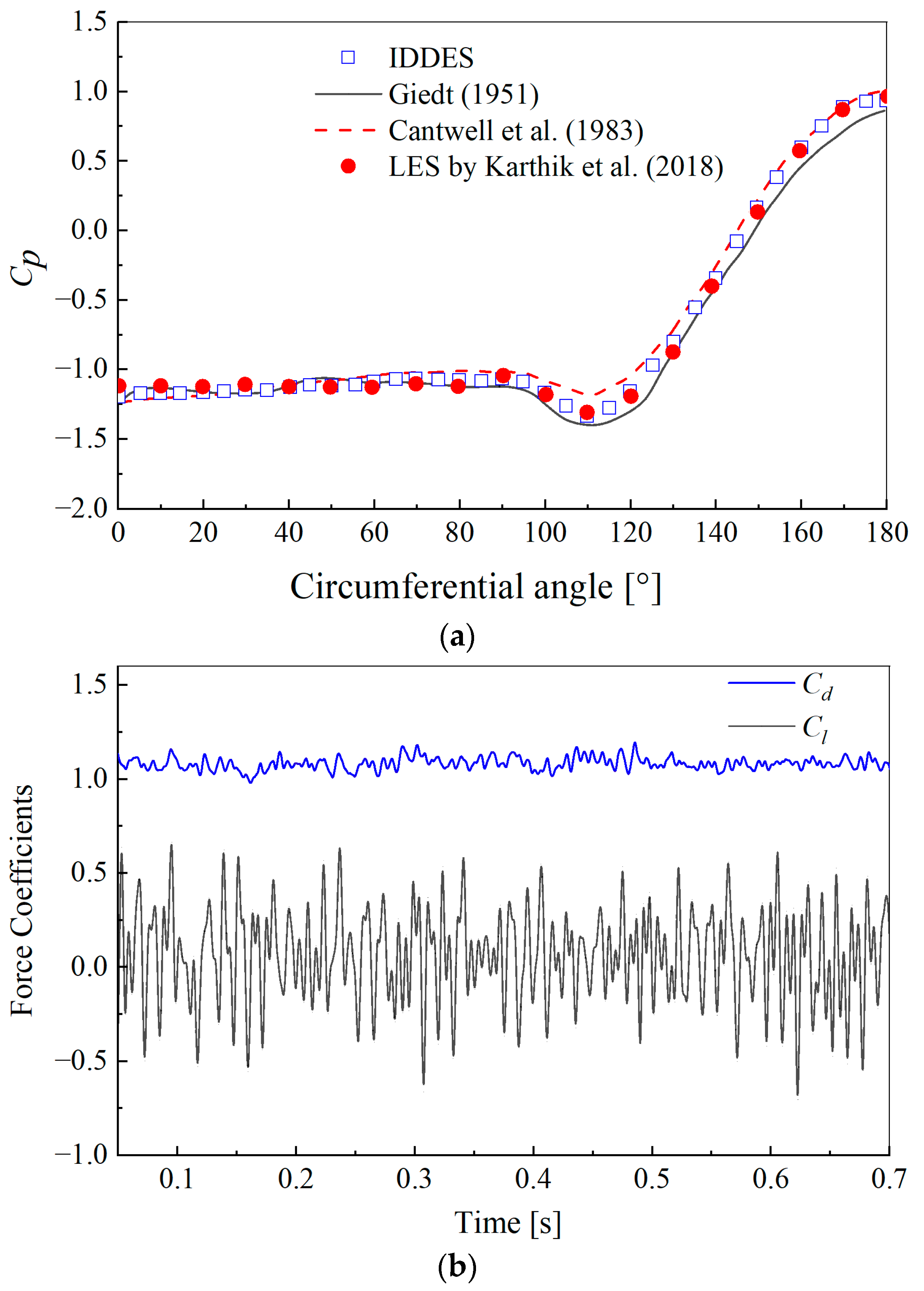
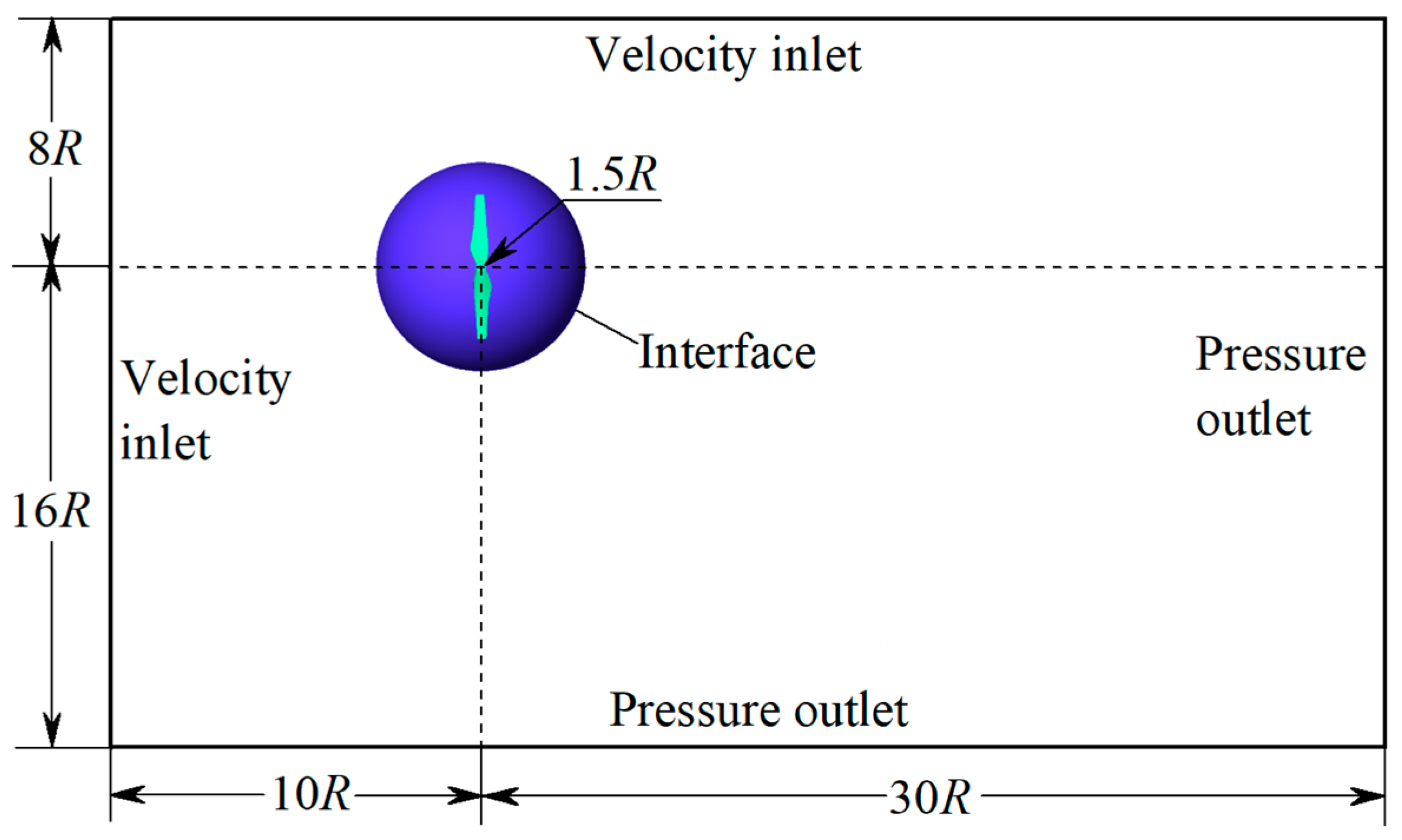
4.1. The Aeroacoustic Simulation
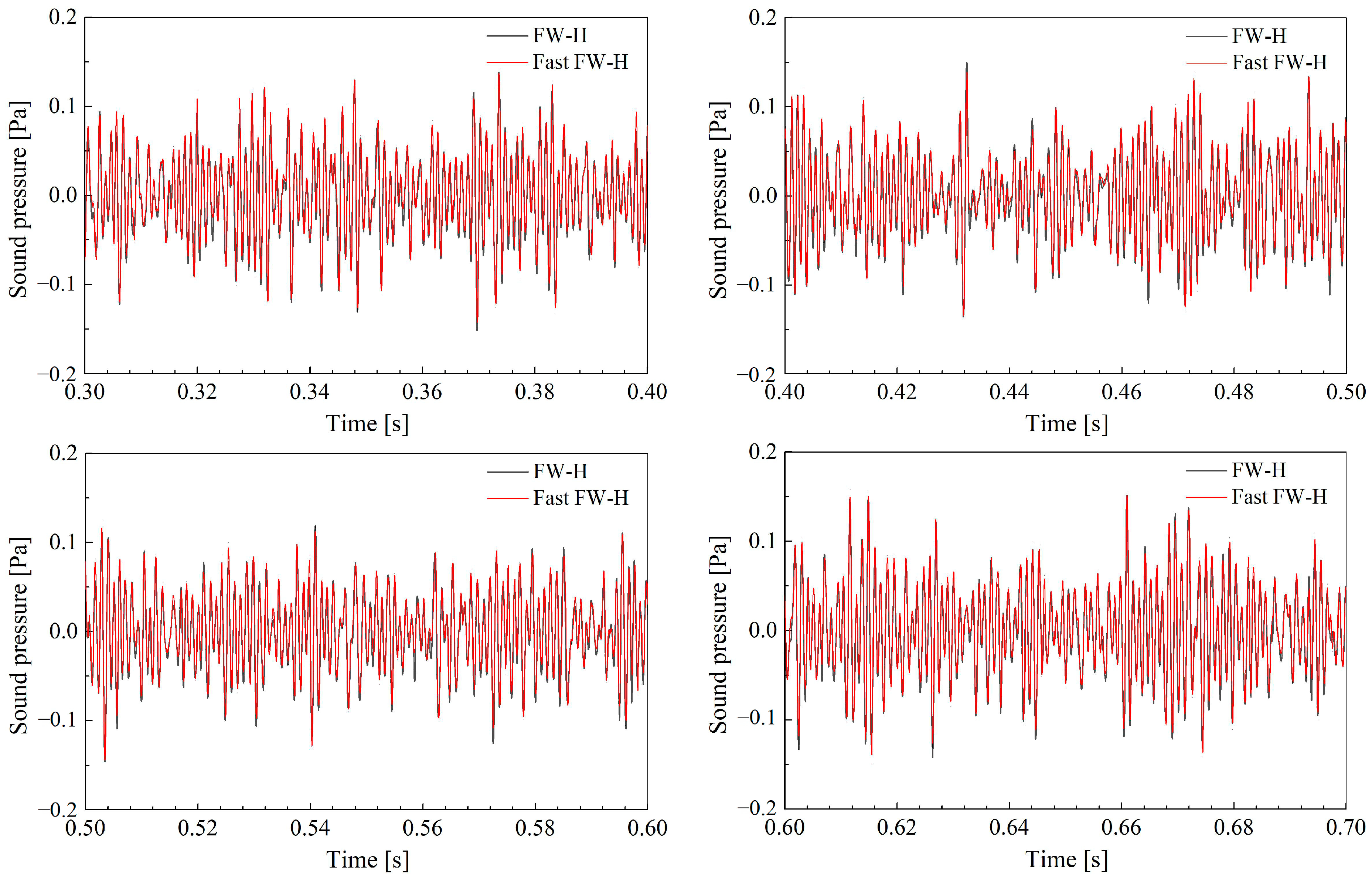
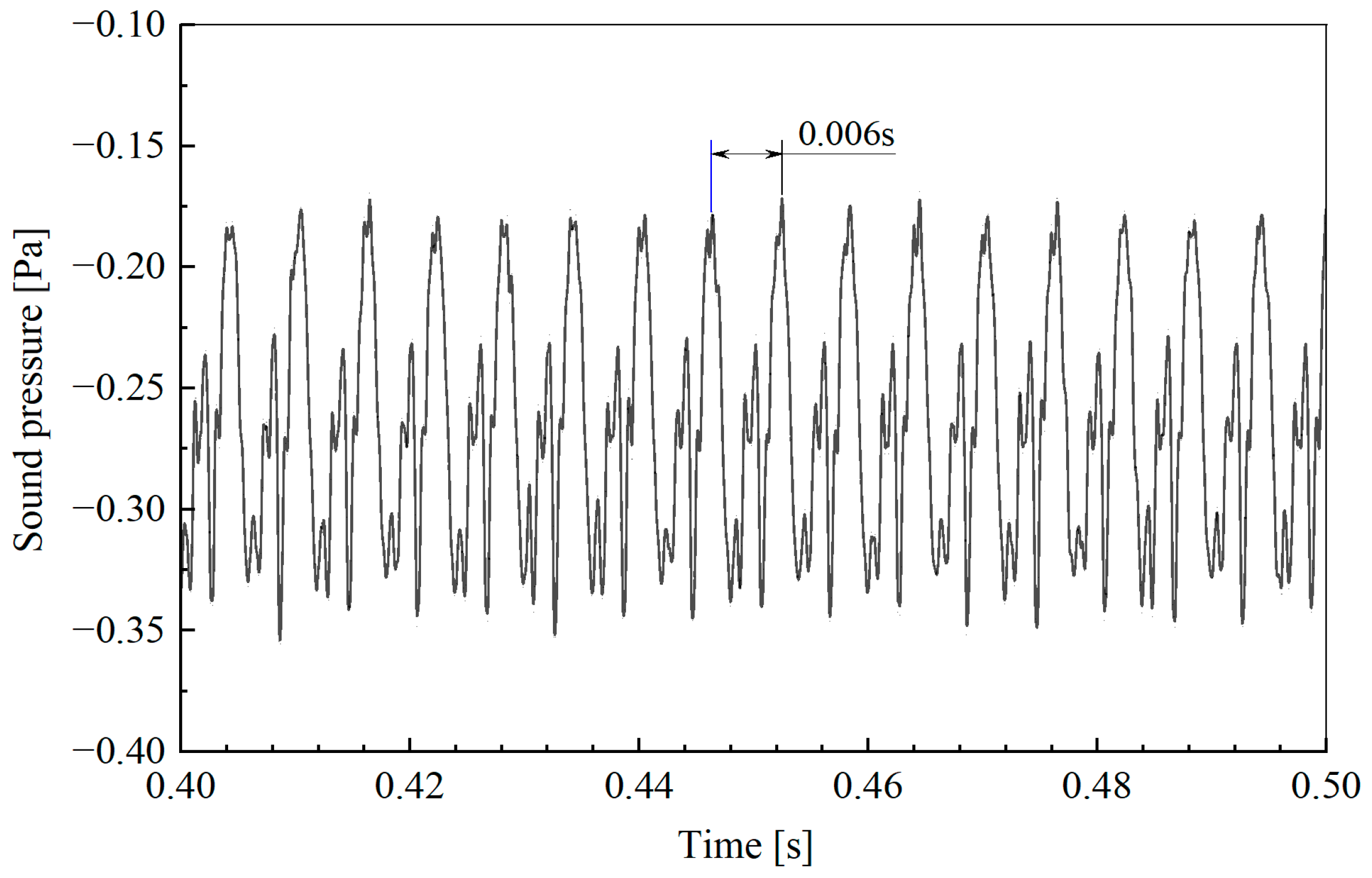
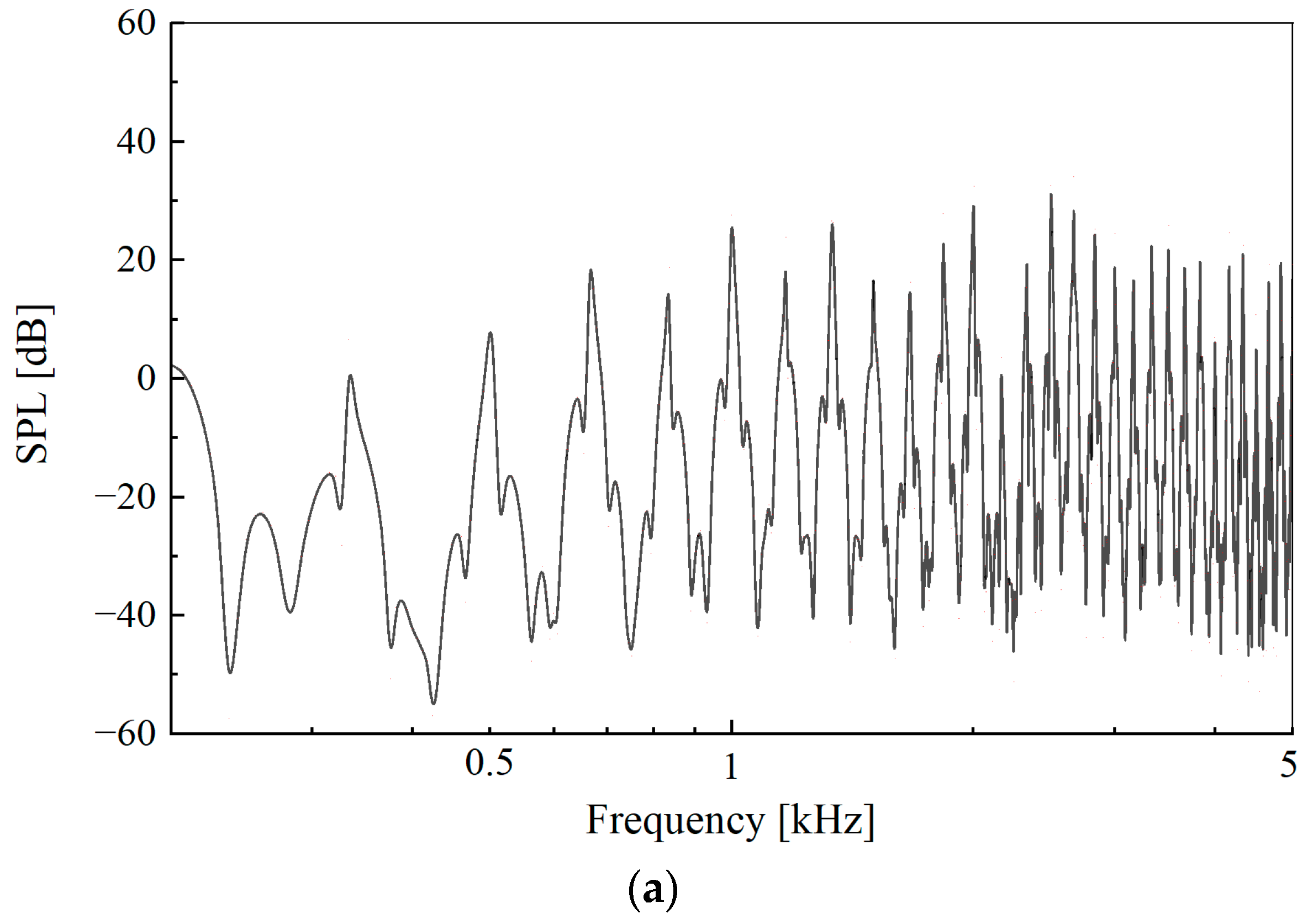
4.2. Sound Characteristics in the Time/Frequency Domain
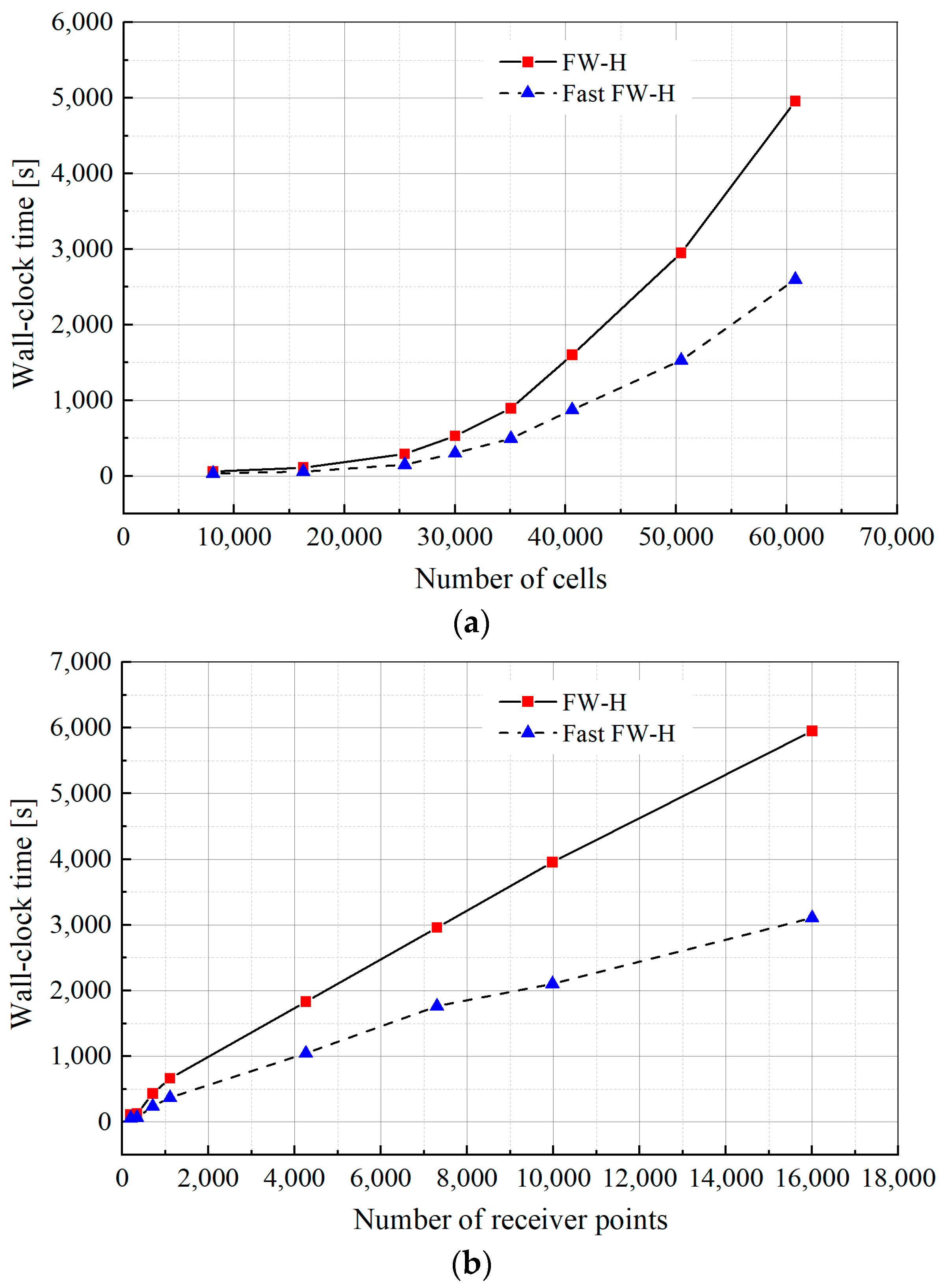
4.3. Convergence and Computational Efficiency
5. Applications to a UAV Propeller during Forward Flight
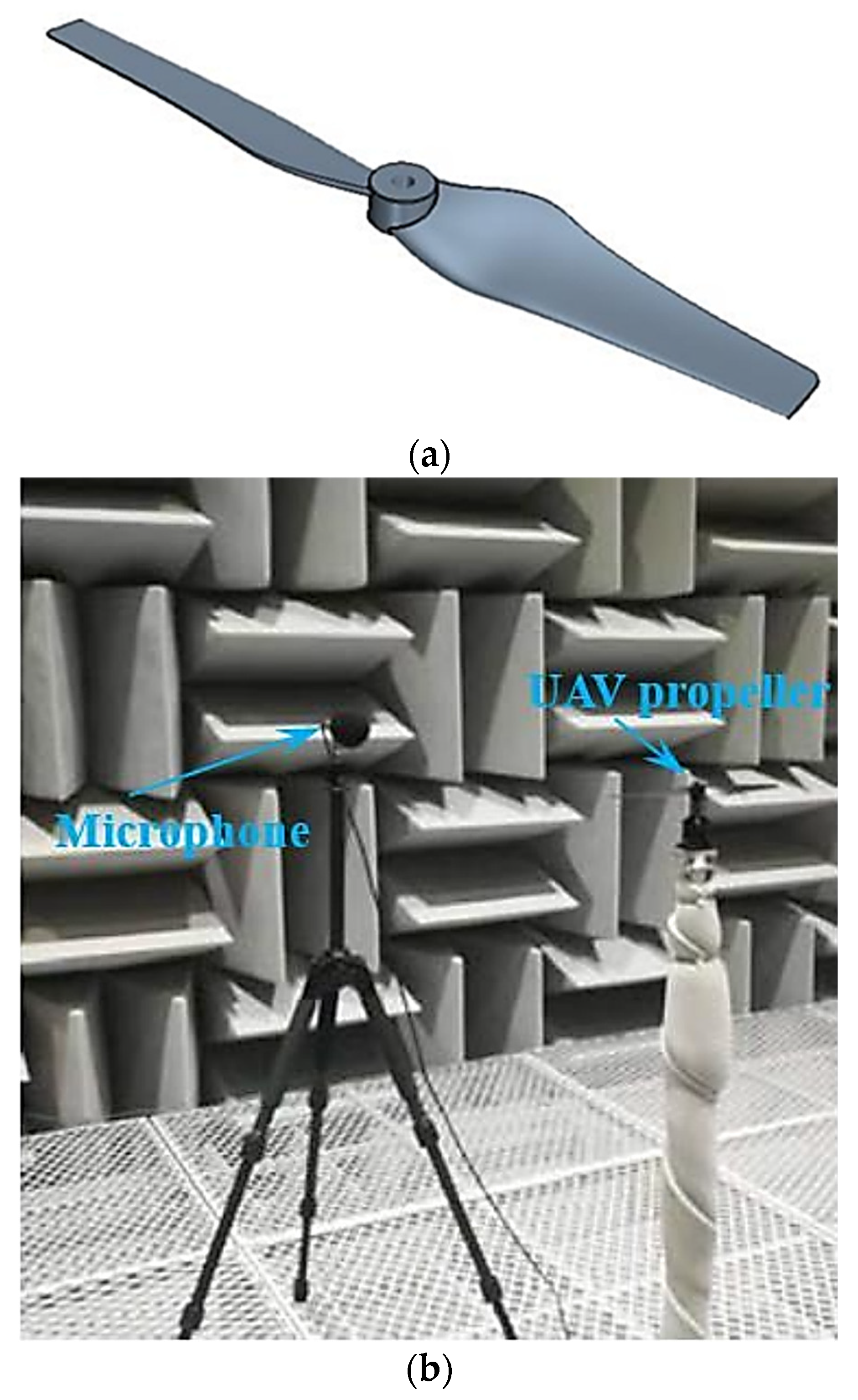
5.1. The Aeroacoustic Experiment and Simulation
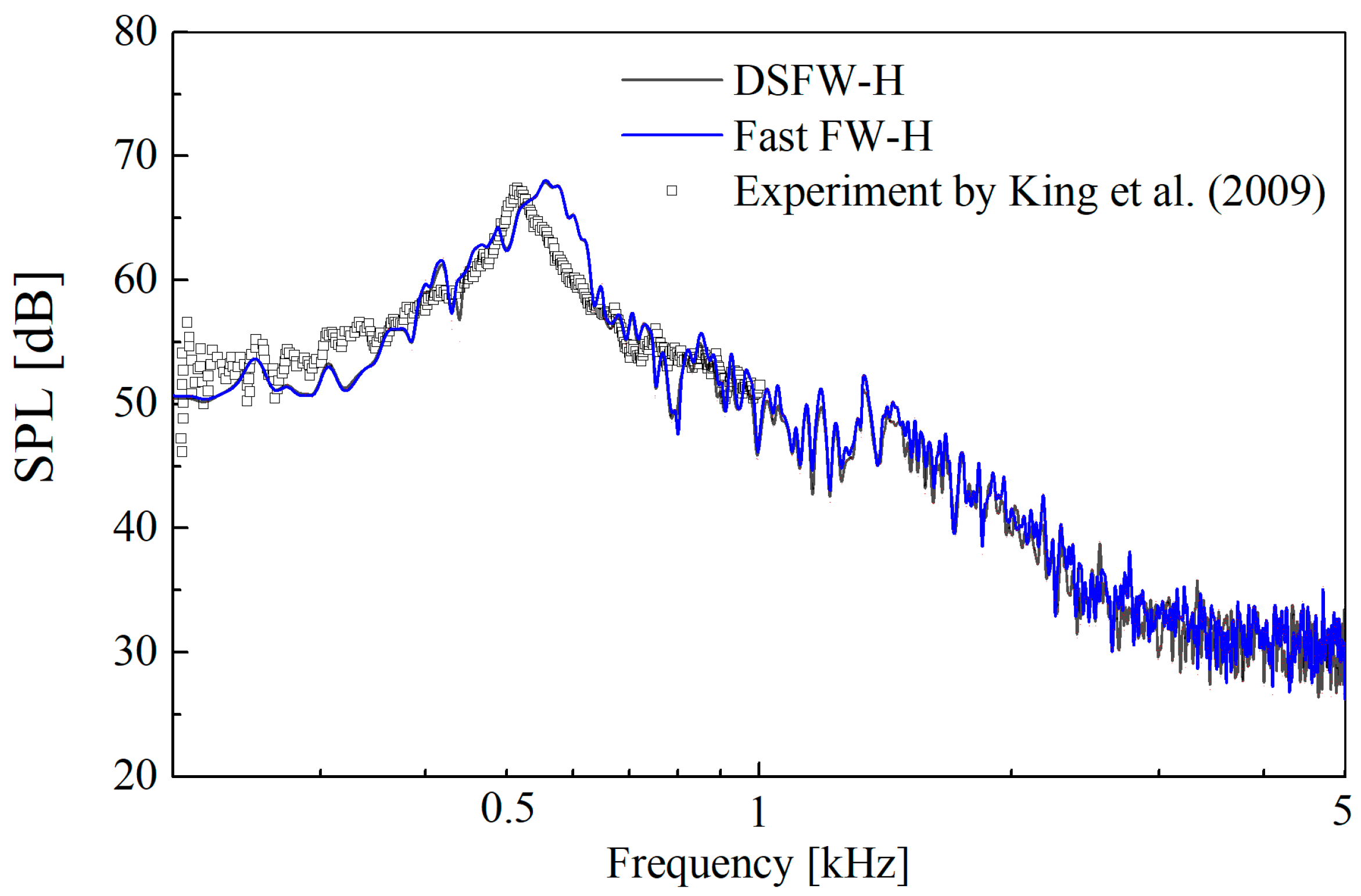
5.2. Sound Characteristics in the Time/Frequency Domain
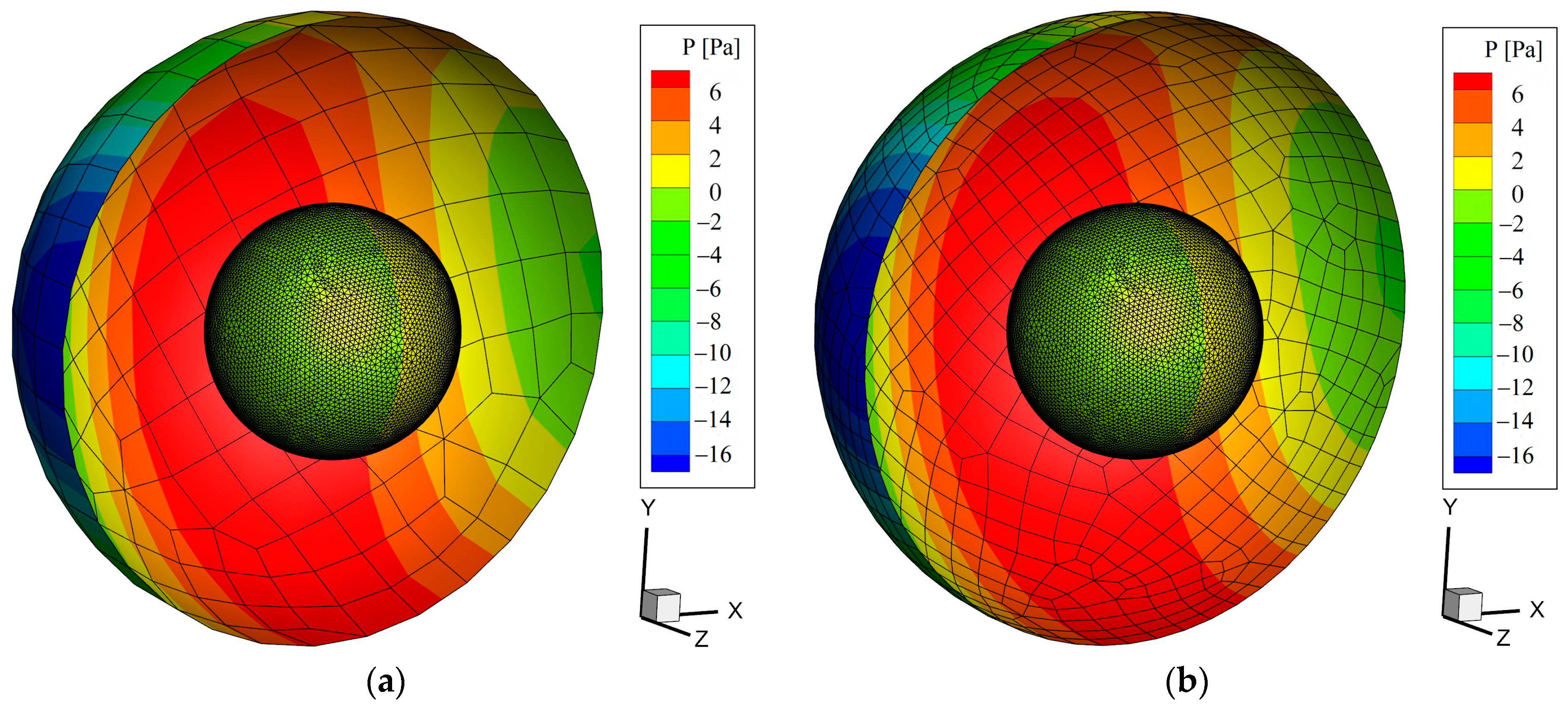
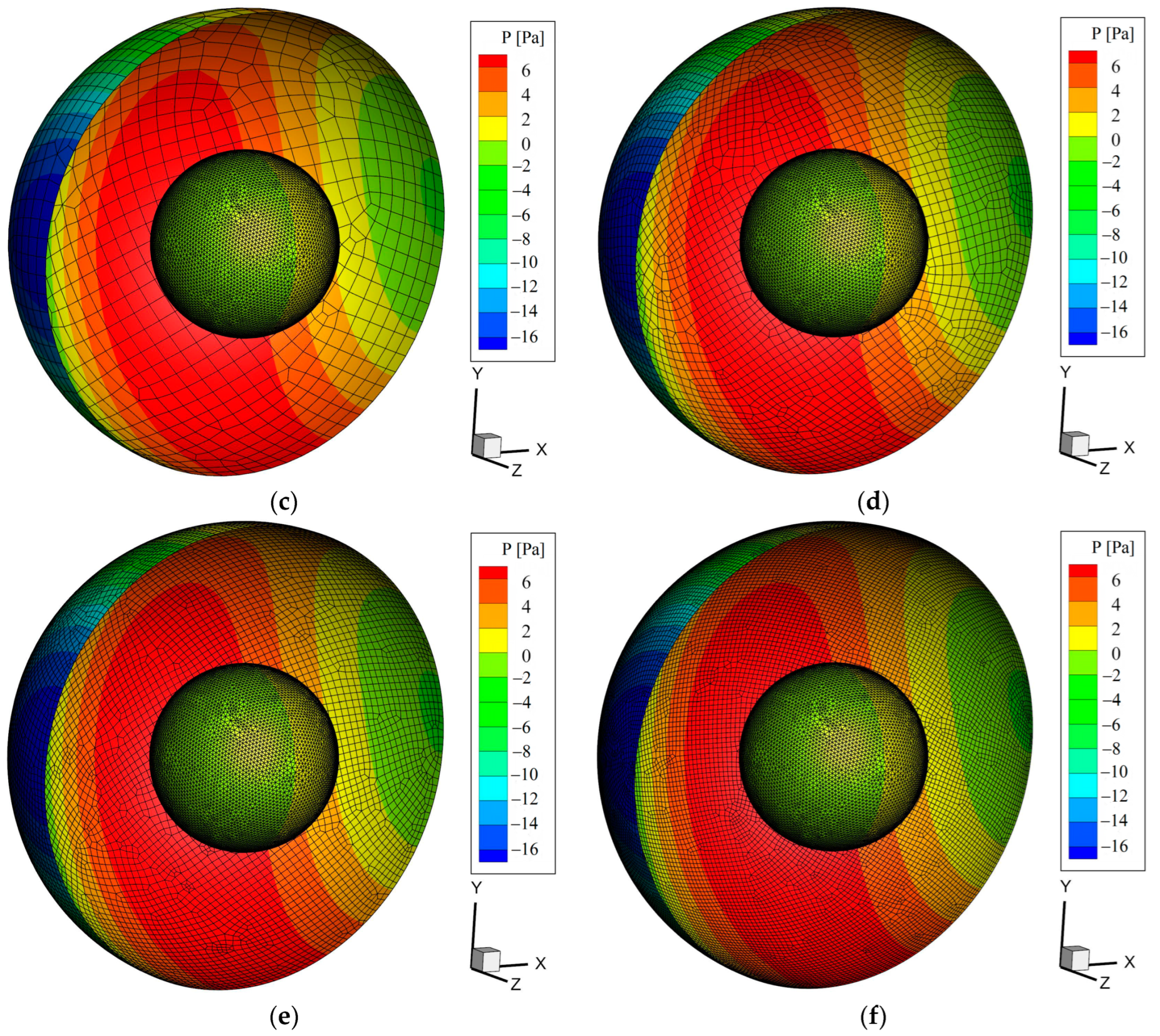
5.3. Computation of Sound in the Far Field
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| speed of sound | |
| flow velocity | |
| surface velocity | |
| unit external normal vector | |
| receiver point time | |
| location integral surface retarded time | |
| location of the receiver points | |
| location of the integral surface | |
| expansion centre close to the node | |
| distance between the source and the receiver, | |
| evaluated at the retarded time | |
| complex conjugate | |
| Mach number, | |
| Lighthill stress tensor | |
| Kronecker delta symbol | |
| viscous stress tensor | |
| Dirac delta function | |
| Heaviside function | |
| sound pressure | |
| static fluid pressure | |
| static fluid density | |
| number of expansion terms | |
| multipole moments centred at | |
| Subscripts | |
| 0 | initial number |
| index number in three-dimensional space | |
| normal direction | |
| observer quantity | |
| source quantity | |
| vector quantity | |
| thickness (monopole) source quantity | |
| loading (dipole) source quantity | |
| Abbreviations | |
| FMM | fast multipole method |
| CFD | computational fluid dynamics |
| FW-H | Ffowcs Williams–Hawkings |
| MSFW-H | monopole source terms of FW-H |
| DSFW-H | dipole source terms of FW-H |
| CBIE | conventional boundary integral equation |
| M2M | moment-to-moment |
| M2L | moment-to-local |
| L2L | local-to-local |
| PSD | power spectral density |
| RPN | number of receiver point |
| IDDES | improved delayed, detached eddy simulation |
References
- Stuermer, A.; Yin, J.; Akkermans, R. Progress in aerodynamic and aeroacoustic integration of CROR propulsion systems. Aeronaut. J. 2014, 118, 1137–1158. [Google Scholar] [CrossRef]
- Zhong, S.; Zhang, X. A sound extrapolation method for aeroacoustics far-field prediction in presence of vortical waves. J. Fluid Mech. 2017, 820, 424–450. [Google Scholar] [CrossRef]
- Lighthill, M.J. On sound generated aerodynamically I. General theory. Proc. R. Soc. Lond. Ser. A Math. Phys. Sci. 1952, 211, 564–587. [Google Scholar]
- Curle, N. The influence of solid boundaries upon aerodynamic sound. Proc. R. Soc. Lond. Ser. A Math. Phys. Sci. 1955, 231, 506–514. [Google Scholar]
- Ffowcs-Williams, J.E.; Hawkings, D.L. Sound generation by turbulence and surfaces in arbitrary motion. Philos. Trans. R. Soc. Lond. Ser. A Math. Phys. Sci. 1969, 264, 321–342. [Google Scholar]
- Hawkings, D.L. Noise generation by transonic open rotors. In Mechanics of Sound Generation in Flows, Proceedings of the Joint Symposium, Goettingen, Germany, 28–31 August 1979; Springer: Berlin/Heidelberg, Germany, 1979; pp. 294–300. [Google Scholar]
- Farassat, F.; Myers, M.K. Extension of Kirchhoff’s formula to radiation from moving surfaces. J. Sound Vib. 1988, 123, 451–460. [Google Scholar] [CrossRef]
- Brentner, K.S.; Farassat, F. Analytical comparison of the acoustic analogy and Kirchhoff formulation for moving surfaces. AIAA J. 1998, 36, 1379–1386. [Google Scholar] [CrossRef]
- Brentner, K.S. An efficient and robust method for predicting helicopter high-speed impulsive noise. J. Sound Vib. 1997, 203, 87–100. [Google Scholar] [CrossRef]
- Brentner, K.S.; Farassat, F. Modeling aerodynamically generated sound of helicopter rotors. Prog. Aerosp. Sci. 2003, 39, 83–120. [Google Scholar] [CrossRef]
- Di Francescantonio, P. A new boundary integraI formuIation for the prediction of sound radiation. J. Sound Vib. 1997, 202, 491–509. [Google Scholar] [CrossRef]
- Farassat, F.; Succi, G.P. The prediction of helicopter rotor discrete frequency noise. Vertica 1983, 7, 309–320. [Google Scholar]
- Farassat, F. Derivation of Formulations 1 and 1A of Farassat; NASA/TM-2007-214853; National Aeronautics and Space Administration: Hampton, VA, USA, 2007.
- Casalino, D. An advanced time approach for acoustic analogy predictions. J. Sound Vib. 2003, 261, 583–612. [Google Scholar] [CrossRef]
- Gennaretti, M.; Testa, C.; Bernardini, G. Frequency-domain method for discrete frequency noise prediction of rotors in arbitrary steady motion. J. Sound Vib. 2012, 331, 5502–5517. [Google Scholar] [CrossRef]
- Tang, H.; Qi, D.; Mao, Y. Analysis on the frequency-domain numerical method to compute the noise radiated from rotating sources. J. Sound Vib. 2013, 332, 6093–6103. [Google Scholar] [CrossRef]
- Chen, X.; Mao, Y.; Qi, D. Frequency-domain acoustic pressure formulation for rotating source in uniform subsonic inflow with arbitrary direction. J. Sound Vib. 2014, 333, 3081–3091. [Google Scholar]
- Mao, Y.; Xu, C.; Qi, D. Computation of instantaneous and time-averaged active acoustic intensity field around rotating source. J. Sound Vib. 2015, 337, 95–115. [Google Scholar] [CrossRef]
- Mao, Y.; Xu, C.; Qi, D. Analytical solution for sound radiated from the rotating point source in uniform subsonic axial flow. Appl. Acous. 2015, 82, 6–11. [Google Scholar] [CrossRef]
- Huang, Z.; Siozos-Rousoulis, L.; De Troyer, T.; Ghorbaniasl, G. Helicopter rotor noise prediction using a convected FW-H equation in the frequency domain. Appl. Acous. 2018, 140, 122–131. [Google Scholar] [CrossRef]
- Siozos-Rousoulis, L.; Amoiridis, O.; Huang, Z.; De Troyer, T.; Kalfas, A.I.; Ghorbaniasl, G. A convected frequency-domain equivalent source approach for aeroacoustic scattering prediction of sources in a moving medium. J. Sound Vib. 2018, 431, 88–104. [Google Scholar] [CrossRef]
- Lyrintzis, A. Surface integral methods in computational aeroacoustics—From the (CFD) near-field to the (acoustic) far-field. Int. J. Aeroacoust. 2003, 2, 95–128. [Google Scholar] [CrossRef]
- Spalart, P.R.; Travin, A.K.; Shur, M.L.; Strelets, M.K. Initial noise predictions for open rotors using first principles. In Proceedings of the 16th AIAA/CEAS Aeroacoustics Conference AIAA, Stockholm, Sweden, 7–9 June 2010. [Google Scholar]
- Dawi, A.; Akkermans, R.A.D. Spurious noise in direct noise computation with a finite volume method for automotive applications. Int. J. Heat Fluid Flow 2018, 72, 243–256. [Google Scholar] [CrossRef]
- Dawi, A.H.; Akkermans, R.A.D. Direct and integral noise computation of two square cylinders in tandem arrangement. J. Sound Vib. 2018, 436, 138–154. [Google Scholar] [CrossRef]
- Sezen, S.; Atlar, M.; Fitzsimmons, P. Prediction of cavitating propeller underwater radiated noise using RANS & DES-based hybrid method. Ships Offshore Struct. 2021, 16 (Suppl. S1), 93–105. [Google Scholar]
- Fu, J.; Vigevano, L. Aeroacoustic modeling of helicopter transonic rotor noise. Aerosp. Sci. Technol. 2002, 122, 107430. [Google Scholar] [CrossRef]
- Greengard, L.; Rokhlin, V. A fast algorithm for particle simulations. J. Comput. Phys. 1987, 73, 325–348. [Google Scholar] [CrossRef]
- Rokhlin, V. A fast algorithm for the discrete Laplace transformation. J. Complex. 1988, 4, 12–32. [Google Scholar] [CrossRef]
- Cheng, H.; Greengard, L.; Rokhlin, V. Regular article: A fast adaptive multipole algorithm in three dimensions. J. Comput. Phys. 1999, 155, 468–498. [Google Scholar] [CrossRef]
- Shen, L.; Liu, Y.J. An adaptive fast multipole boundary element method for three-dimensional acoustic wave problems based on the Burton–Miller formulation. Comput. Mech. 2006, 40, 461–472. [Google Scholar] [CrossRef]
- Greengard, L.; Rokhlin, V. A new version of the Fast Multipole Method for the Laplace equation in three dimensions. Acta Numer. 1997, 6, 229–269. [Google Scholar] [CrossRef]
- Liu, Y.J.; Nishimura, N. The fast multipole boundary element method for potential problems: A tutorial. Eng. Anal. Bound. Elem. 2006, 30, 371–381. [Google Scholar] [CrossRef]
- Liu, Y.J. Fast Multipole Boundary Element Method: Theory and Applications in Engineering; Cambridge University Press: Cambridge, UK, 2009. [Google Scholar]
- Nishimura, N. Fast multipole accelerated boundary integral equation methods. Appl. Mech. Rev. 2002, 55, 299–324. [Google Scholar] [CrossRef]
- Liu, Y.J. On the BEM for acoustic wave problems. Eng. Anal. Bound. Elem. 2019, 107, 53–62. [Google Scholar] [CrossRef]
- Cheng, H.; Crutchfield, W.Y.; Gimbutas, Z.; Greengard, L.F.; Ethridge, J.F.; Huang, J.; Rokhlin, V.; Yarvin, N.; Zhao, J. A wideband fast multipole method for the Helmholtz equation in three dimensions. J. Comput. Phys. 2006, 216, 300–325. [Google Scholar] [CrossRef]
- Wolf, W.R.; Lele, S.K. Acoustic analogy formulations accelerated by fast multipole method for two-dimensional aeroacoustic problems. AIAA J. 2010, 48, 2274–2285. [Google Scholar] [CrossRef]
- Wolf, W.R.; Lele, S.K. Aeroacoustic integrals accelerated by fast multipole method. AIAA J. 2011, 49, 1466–1477. [Google Scholar] [CrossRef]
- Wolf, W.R.; Azevedo, J.L.F.; Lele, S.K. Convective effects and the role of quadrupole sources for aerofoil aeroacoustics. J. Fluid Mech. 2012, 708, 502–538. [Google Scholar] [CrossRef]
- Mao, Y.; Xu, C. Accelerated method for predicting acoustic far field and acoustic power of rotating source. AIAA J. 2016, 54, 603–615. [Google Scholar] [CrossRef]
- Spalart, P.R. Comments on the feasibility of LES for wings, and on a hybrid RANS/LES approach. In Proceedings of the First AFOSR International Conference on DNS/LES, Ruston, LA, USA, 4–8 August 1997; pp. 4–8. [Google Scholar]
- Shur, M.L.; Spalart, P.R.; Strelets, M.K.; Travin, A.K. A hybrid RANS-LES approach with delayed-DES and wall-modelled LES capabilities. Int. J. Heat Fluid Flow 2008, 29, 1638–1649. [Google Scholar] [CrossRef]
- Spalart, P.R. Detached-eddy simulation. Ann. Rev. Fluid Mech. 2009, 41, 181–202. [Google Scholar] [CrossRef]
- Farassat, F. Linear acoustic formulas for calculation of rotating blade noise. AIAA J. 1981, 19, 1122–1130. [Google Scholar] [CrossRef]
- Najafi-Yazdi, A.; Brès, G.A.; Mongeau, L. An acoustic analogy formulation for moving sources in uniformly moving media. Proc. R. Soc. A Math. Phys. Eng. Sci. 2010, 467, 144–165. [Google Scholar] [CrossRef]
- Zhong, S.; Zhang, X. A generalized sound extrapolation method for turbulent flows. Proc. R. Soc. A Math. Phys. Eng. Sci. 2018, 474, 20170614. [Google Scholar] [CrossRef]
- Shen, L.; Liu, Y.J. An adaptive fast multipole boundary element method for three-dimensional potential problems. Comput. Mech. 2006, 39, 681–691. [Google Scholar] [CrossRef]
- Yoshida, K. Applications of Fast Multipole Method to Boundary Integral Equation Method; Department of Global Environment Engineering, Kyoto University: Kyoto, Japan, 2001. [Google Scholar]
- Lockard, D. A comparison of Ffowcs Williams-Hawkings solvers for airframe noise applications. In Proceedings of the 8th AIAA/CEAS Aeroacoustics Conference and Exhibition, Washington, DC, USA, 17–19 June 2022; pp. 2002–2580. [Google Scholar]
- Ghorbaniasl, G.; Lacor, C. A moving medium formulation for prediction of propeller noise at incidence. J. Sound Vib. 2012, 331, 117–137. [Google Scholar] [CrossRef]
- Jacob, M.C.; Boudet, J.; Casalino, D.; Michard, M. A rod-airfoil experiment as a benchmark for broadband noise modeling. Theor. Comput. Fluid Dyn. 2004, 19, 171–196. [Google Scholar] [CrossRef]
- King, W.; Pfizenmaier, E. An experimental study of sound generated by flows around cylinders of different cross-section. J. Sound Vib. 2009, 328, 318–337. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhang, J.; Li, T.; Zhang, L. Investigation of the aeroacoustic behavior and aerodynamic noise of a high-speed train pantograph. Sci. China Technol. Sci. 2017, 60, 561–575. [Google Scholar] [CrossRef]
- Iglesias, E.L.; Thompson, D.; Smith, M. Experimental study of the aerodynamic noise radiated by cylinders with different cross-sections and yaw angles. J. Sound Vib. 2016, 361, 108–129. [Google Scholar] [CrossRef]
- Giedt, W.H. Effect of turbulence level of incident air stream on local heat transfer and skin friction on a cylinder. J. Aeronaut. Sci. 1951, 18, 725–730. [Google Scholar] [CrossRef]
- Cantwell, B.J.; Coles, D. An experimental study of entrainment and transport in the turbulent near wake of a circular cylinder. J. Fluid Mech. 1983, 136, 321–374. [Google Scholar] [CrossRef]
- Karthik, K.; Vengadesan, S.; Bhattacharyya, S.K. Prediction of flow induced sound generated by cross flow past finite length circular cylinders. J. Acoust. Soc. Am. 2018, 143, 260–270. [Google Scholar] [CrossRef] [PubMed]
- Norberg, C. Flow around a circular cylinder: Aspects of fluctuating lift. J. Fluids Struct. 2001, 15, 459–469. [Google Scholar] [CrossRef]
- Yang, Y.; Liu, Y.; Li, Y.; Arcondoulis, E.; Wang, Y. Aerodynamic and aeroacoustic performance of an isolated multicopter rotor during forward flight. AIAA J. 2020, 58, 1171–1181. [Google Scholar] [CrossRef]







Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Liu, Y. Fast Evaluations of Integrals in the Ffowcs Williams–Hawkings Formulation in Aeroacoustics via the Fast Multipole Method. Acoustics 2023, 5, 817-844. https://doi.org/10.3390/acoustics5030048
Zhang Y, Liu Y. Fast Evaluations of Integrals in the Ffowcs Williams–Hawkings Formulation in Aeroacoustics via the Fast Multipole Method. Acoustics. 2023; 5(3):817-844. https://doi.org/10.3390/acoustics5030048
Chicago/Turabian StyleZhang, Yadong, and Yijun Liu. 2023. "Fast Evaluations of Integrals in the Ffowcs Williams–Hawkings Formulation in Aeroacoustics via the Fast Multipole Method" Acoustics 5, no. 3: 817-844. https://doi.org/10.3390/acoustics5030048
APA StyleZhang, Y., & Liu, Y. (2023). Fast Evaluations of Integrals in the Ffowcs Williams–Hawkings Formulation in Aeroacoustics via the Fast Multipole Method. Acoustics, 5(3), 817-844. https://doi.org/10.3390/acoustics5030048