1. Introduction
It has been estimated that nowadays soil salinity constrains agriculture in 10 to 25% of the irrigated lands globally [
1,
2,
3]. Besides, the extension and intensity of salinization is expected to increase in the near future in low-lying areas as the sea-level rises [
4], and in dry areas as the climate aridity strengthens [
5]. In order to cope with this degradation process, it is necessary to count on reliable, but also fast, methods of soil salinity appraisal.
The electrical conductivity (EC) at 25 °C of the soil saturated extract (
σe) has been traditionally the standard measurement of soil salinity, and all the studies of crop tolerance to salinity referred to it [
6,
7,
8]. However, the procedure of sampling and subsequent laboratory preparation of water-saturated soil-pastes is destructive and, moreover, time-consuming and laborious, and thus very expensive for data-intensive works. For this reason, several probes for the on-site measurement of the EC of the bulk soil, i.e.,
σb, have been developed during the last forty years in order to estimate the
σe from the
σb value. However, the
σb values result from the combination of several physicochemical soil properties, which include not only the soluble salts, but also the clay percentage and mineralogy, the water content, the organic matter content, the soil structure, and the temperature [
9,
10,
11,
12,
13,
14], thus complicating the prediction of
σe from
σb.
Although some of the soil properties influencing
σb have little importance for practical purposes, other such as the clay percentage and mineralogy have been found to be almost as influential as the soil salinity itself on the soil conductivity measurements taken, e.g., with the EM38 (unpublished results) and cannot be neglected. Therefore, site-specific calibration equations that relate
σe to
σb have been developed throughout the years to estimate the soil salinity in different types of soils [
15,
16,
17]. Moreover, in addition to all the soil properties that influence
σb, different sensors respond differently to the same bulk soil. This occurs, first of all, because of the physical foundations in which the sensor is based, and second, because of the different soil volumes the sensor is sensitive to, in combination with the downward and lateral variability of soils [
18]. Different sensing volumes are a logical consequence of the probe size, but also of its specific physical foundations and the working frequency of the electromagnetic fields it uses.
The first commercial devices that were used to measure
σb were based on the measurement of the soil electrical resistance (ER) by means of four-electrode integrated probes [
19]. Nowadays, the ER technique is still arguably the most widely used for
σb measurement, mostly because it is used in the simplified two-electrode sensors that are integrated within the capacitance-conductance combined (CCC) probes [
20,
21,
22]. Other sensors for
σb measurement are based on reflectometry, remarkably in the time domain (TDR) [
12,
23,
24]. Then, electromagnetic induction (EMI) is another important technique used in many instruments [
25,
26], which notably does not need soil contact, and therefore is ideal for data-intensive works [
27,
28,
29,
30]. Finally, in more recent years the reflectometry technique has been expanded to the frequency domain with the development of frequency domain reflectometry (FDR) sensors for detection and reading of
σb in addition to soil relative bulk dielectric permittivity (
εb) [
31,
32,
33].
The use of electrical conductivity probes offers a cost-effective way for soil salinity appraisal [
12,
26]. The rapid information obtained with these proximal probes can be readily used in a sustainable agriculture framework for monitoring and, eventually, for decision-making. Empirical or semi-empirical calibrations have been almost always used to estimate
σe from
σb, and since the
σb values obtained with the different available sensors are also different, not only site-specific, but also sensor-proprietary calibrations have been developed [
20,
21,
22]. The calibrations have been developed mostly under laboratory conditions using sandy soils [
22,
33,
34]. Besides, some comparisons between different techniques for
σb measurement have been carried out, e.g., ER vs. TDR [
22], TDR vs. FDR [
35], ER vs. FDR [
21], and EMI vs. TDR [
18,
36]. However, a comparison between more than two techniques, such as ER, EMI, and FDR, and for the appraisal of soil salinity in a large agricultural irrigated area of diverse soil texture has not been done up to date to the best of our knowledge. Comparisons of this kind are of the utmost interest for scientists and practitioners to help them choose among the different available options.
In the present work three commercial probes with different physical foundations, that is, electrical resistance (SCT-10), electromagnetic induction (EM38), and frequency domain reflectometry (WET-2) were compared for the measurement of σb and, eventually, for the estimation of salinity in terms of σe in an ample salt-threatened irrigated area in south-eastern Spain.
3. Materials and Methods
3.1. Study Area
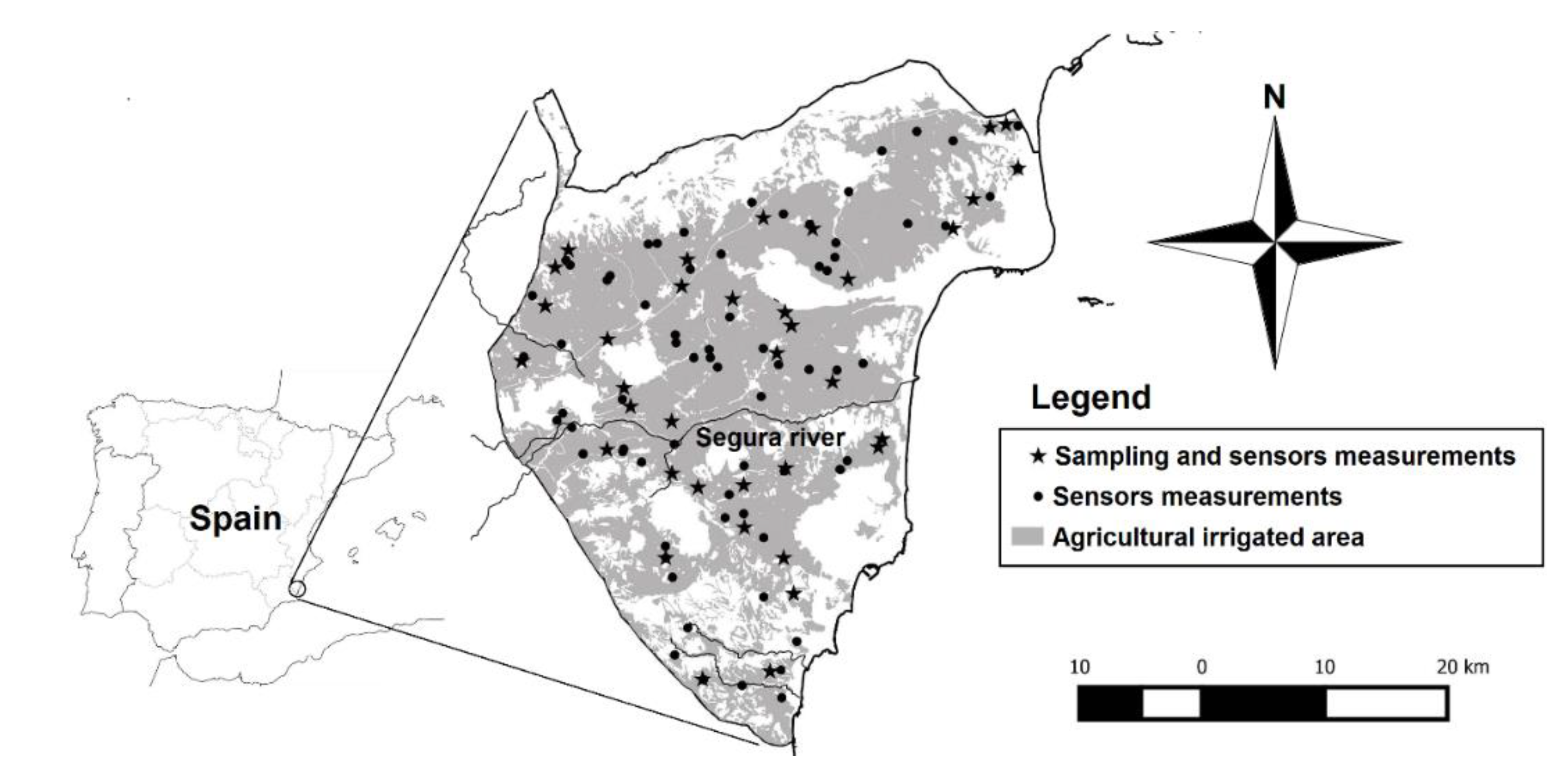
The Vega Baja del Segura and Baix Vinalopó jointly constitute an area in south-eastern Spain with over 55,000 ha under irrigation (
Figure 1). This area is salt-threatened because of the low quality of the irrigation waters, the aridity of the climate, and the limitations for land drainage [
45].
3.2. Survey Design
A systematic-random sampling design was applied to the entire study area and used to gather a dataset of measurements and sampling agricultural irrigated sites that were representative, thus capturing the soil variability but avoiding bias [
46]. Specifically, a total of 107 sites were selected for the measurement of the soil electrical conductivity with the probes SCT-10, EM38, and WET-2 (
Figure 1). From these, 37 sites were also sampled, as is described in the following subsection (
Figure 1).
3.3. Soil Field Measurements and Sampling
In each site, first of all, the EM38 was set up away from the target spot by leaving the instrument to warm-up in the shade for 15 min, then by switching the I/P and Q/P controls to have a zero measurement with the instrument laying on a sufficiently large expanse of homogeneous low-conductive ground, e.g., the access road, and finally, by switching the Q/P control to have a measurement in the vertical dipole mode double than in the horizontal one at 1.5 m height.
Once the EM38 setup was finished, the EM38 was taken to the exact target agricultural site and the σb* measurements were taken in the vertical and horizontal dipole orientations at five different heights over the ground: 0, 50, 100, 150, and 200 cm.
Next, just below the center of the EM38, the WET-2 was used to take its corresponding σb, εb, and T measurements at the soil surface (0 cm) and additionally, by drilling with a Riverside auger, at 10, 30, and, either 50 or 60 cm depending on soil compactness. The extracted soil was separately collected from the 0–10, 10–30, 30–65, and 65–95 depth intervals, saved in plastic bags, and carried to the laboratory.
Additionally, on a spot 1 to 2 m from the center of the EM38, another hole was drilled with another narrower auger and the SCT-10 measurements of σb and T were taken at the following depths: 10, 30, 50, 60, 70, and 80 cm providing there was good enough contact between the probe electrodes and the soil.
3.4. Soil Laboratory Determinations
In the laboratory the soil samples were first of all analyzed for field water mass fraction (ww) by weighing a representative subsample, oven-drying at 105 °C for 24 h, and weighing again. Then, the whole samples were spread out on trays, left to air-dry, and gently deaggregated to pass a 2-mm mesh sieve. The air-dried fine earths were then analyzed for hygroscopic water mass fraction (wh), saturated paste water mass fraction (we), electrical conductivity at 25 °C in the saturation extract (σe), clay mass fraction (wc), and soil organic matter mass fraction (wom) using the ensuing methods.
The saturated soil pastes were prepared according to Rhoades [
47], but using deionized water (
σ25 ≈ 1 μS/cm) as the only reagent in the entire procedure, allowing the soil-water mixtures to equilibrate for approximately four hours and taking a subsample for
we determination, which was done by means of oven-drying at 105 °C for 24 h. Then, the saturation extract was obtained by suction with a vacuum system, and the
σe was measured within one hour of extract collection with a microCM 2201 conductivity meter (Crison Instruments S.A., Barcelona, Spain) equipped with a conductivity cell of 1.1 cm
−1 constant.
The clay, along with the silt and sand mass fractions according to the USDA, were determined using the Bouyoucos densimeter method [
48]. The soil organic matter mass fraction was determined following the Walkley-Black procedure [
49].
3.5. Calculation of the σb Values for the Sampled Soil Layers
The σb and T values of the four soil layers in which the soil was split for sampling, i.e., 0–10, 10–30, 30–65, and 65–95, were calculated from the probe measurements at the point soil depths at which these latter were made, as is explained in the following. These soil-depth-standardized σb and T values were then used for all the comparisons and models.
3.5.1. From the Martek SCT-10 and Delta-T WET-2 σb Measurements
In the case of the SCT-10 and WET-2 probes, the σb and T values corresponding to the sampled soil depth intervals were calculated by linear interpolation, taking the mid depths of 5, 20, 47.5, and 80 cm for, respectively, the 0–10, 10–30, 30–65, and 65–95 cm depth layers.
3.5.2. From the Geonics EM38 σb* Measurements
In the case of the EM38, the σb of the aforementioned layers in addition to the soil below 95 cm were assessed from the σb* measurements in both dipole orientations and heights over the ground by the inverse matrix multiplication of Equation (6). However, since all the σb* measurements were highly correlated, this inverse problem was computationally ill-defined and could not be addressed the simply way.
A Tikhonov regularization in which the minimum of the following target function (Φ) is searched trying different values of the
λ parameter has been found to satisfactorily sort out the aforementioned problem [
41,
42]:
In Equation (14), X stands for V (vertical) or H (horizontal),
σb(Xhi)* and
σb(Xhi)*′ are, respectively, the observed and predicted depth-weighted electrical conductivity in the X dipole mode at the
hi height, and
ljk is the element of the
jth row and
kth column of the following second derivative matrix
L (Equation (15)):
In this work different values of the λ parameter within the range from 0 to 2 were used, and the value that featured the vertex of the L-shaped curve that arises when the first term on the right is graphed against the second one was selected as the most adequate for each site.
After the
σb calculations were done, the hypothesis of low enough conductivity was checked through the calculation of the soil induction number
NB
where
σb_m is the depth-average soil conductivity calculated according to:
where
σb(
dj) and Δ
dj are, respectively, the
σb and thickness of the
dj soil layer.
3.6. Calculation of σb at 25 °C (σb,25)
The SCT-10 calculates the bulk soil electrical conductivity at 25 °C (σb,25) and offers this value to the user, however, the EM38 and the WET-2 do not. For these latter two probes, the σb,25 was calculated from σb by applying the same equation used by the SCT-10 (Equation (2)) along with the temperature measured by the WET-2.
3.7. Data Analyses
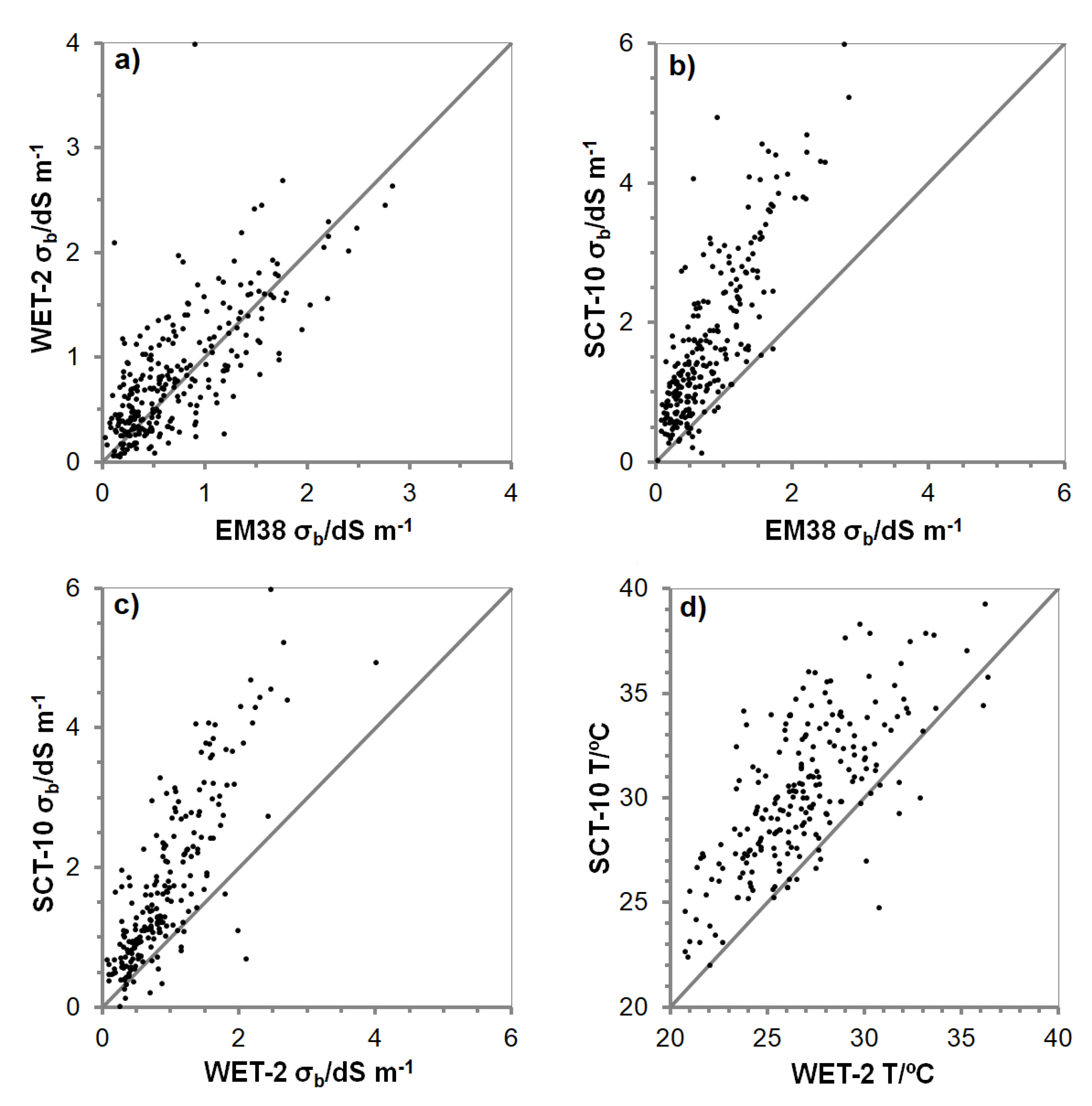
The values of
σb obtained with each probe were pairwise compared, first graphically and then analytically, by testing the equality to zero of the mean standardized difference with the aid of the Student’s
t-test [
50].
Next, the three probes were further compared by developing multiple linear regression (MLR) models in order to assess the
σe from the
σb measurements, additionally finding out whether the inclusion of other soil properties, either measured, calculated, or determined in the laboratory may improve the model’s prediction ability. In order to know in which order these properties should be tried to be included in the corresponding MLR model, the Pearson’s product moment correlation coefficients of
σe with each property were calculated in advance for the sites and depths for which the specific probe measurements were available. Then, the MLR models were built, including one property at a time from the highest to the lowest correlation coefficient in absolute value. Every time one new property was included in the model, the equality to zero of its regression coefficient was tested using the Student’s
t-test. If the regression coefficient was different from zero at the 95% confidence level, the property was kept in the model, otherwise it was dropped. In this way, the ability of the probes to assess the
σe was evaluated by means of the coefficients of determination, the root mean standard errors (RMSE), and the Lin’s concordance correlation coefficients [
51] of the MLR models, as well as the significance of the regression coefficients. All the statistical analyses were carried out with the R software [
52].
5. Discussion
Nowadays, soil scientists and practitioners have different techniques available for salinity appraisal by means of σb measurements. These techniques can be arranged in order of increasing complexity and hence age, from first to last: Electrical resistance (ER), electromagnetic induction (EMI), time domain reflectometry (TDR), and frequency domain reflectometry (FDR). In this work, three out of these four were compared, namely, ER, EMI, and FDR, by means of classical devices, respectively, the Martek SCT-10, the Geonics EM38, and the Delta-T WET-2. The σb measurements taken with all three instruments were moderate-to-highly correlated, however, not only scattering occurred, but also remarkable systematic deviations. These happened mainly between the SCT-10 probe and the other two because this ER sensor gave consistently higher σb measurements.
In the case of the EM38, which is a contactless technique, the
σb values were not measured but, alternatively, they had to be calculated by means of the inversion of Equation (6). This 1D inversion uses the sensitivity functions developed by McNeill [
40], which were derived from an asymptotic approximation to the Maxwell’s equations and are valid as long as the ability of the soil to attenuate the primary magnetic field of the EMI instrument is not too high. This occurs when the soils are not very conductive or, in other words, when the induction number is low enough (
NB << 1). According to different researches, the limit between low and high induction numbers (
NB) lays somewhere between 0.32 and 0.02 [
53]. In our work, they have been estimated to be between 0.012 and 0.101 with mean of 0.055, i.e., closer to the lower part of that range than to the higher one, thus giving us confidence that the low induction number hypothesis was acceptably fulfilled.
Therefore, assuming that the McNeill’s approach to Maxwell’s equations is acceptable for most of our soils, the
σb values calculated by inversion of Equation (6) using Equations (4) and (5) are considered to adequately correspond to true
σb values [
53], i.e., those that would be measured by a reliable direct contact technique, e.g., either ER, FDR, or TDR. In our case, the dispersion between the EM38-calculated
σb values and the WET-2
σb measurements can be attributed in an important extent to the very different soil volumes sensed by each probe as shown in
Table 1, which was also a cause indicated by Coppola et al. [
18] when comparing between EMI and TDR. However, in spite of this fact, on average, the EM38-calculated
σb data were very similar to the WET-2 measurements thus boosting our confidence that the 1D inversion of Equation (6) had been appropriate.
The systematic departures in the SCT-10 measurements in comparison to the other two devices were even observed in the temperature. However, in spite of these differences all three instruments may still be profitably used for soil salinity appraisal provided probe-specific and maybe site-specific calibrations are developed. In this regard, modelling for
σe estimation on the basis of only
σb led to very poor models, mainly with the EM38 (R
2 = 0.20), but also with the SCT-10 and the WET-2 probes (R
2 = 0.30 both). Interestingly, the use of temperature-standardized measurements worsened the models. This fact indicates that an equation like Equation (2), which has been developed for aqueous solutions, does not satisfactorily work for the bulk soils. This is an already observed effect, which has been explained on the basis of the contribution to
σb from the exchange ions within the bound soil water, whose conductivity would increase with temperature more steeply than the conductivity of the ions within the free soil water [
54]. Therefore, since the soils of the study area are remarkably clayey, temperature should be included in the models for
σe estimation, however, this must not be done with equations developed for aqueous systems, but through an alternative means. The inclusion of the temperature as another factor within an empirical MLR model was tried as this alternative in this research and it worked better, although significantly only for the WET-2 probe (
p < 0.05).
Besides, since the
σb is known to depend not only on salinity and temperature, but on several soil properties [
9,
10,
11,
12,
14], other ground attributes were checked in the MLR models for
σe estimation as has been done by other researchers [
55]. These properties were selected considering the most influential on the
σb* measurements taken with the EM38 (unpublished results):
wc,
θw, bulk density (
ρb),
wom, and
T. Specifically, three of these properties were tried to be included as such since they had been either determined or measured (
wc,
wom and
T), whereas for
ρb no data was available, and for
θw the inclusion was tried by means of surrogates, which were
εb1/2 in the case of the WET-2, and
ww, in the case of the SCT-10 and the EM38.
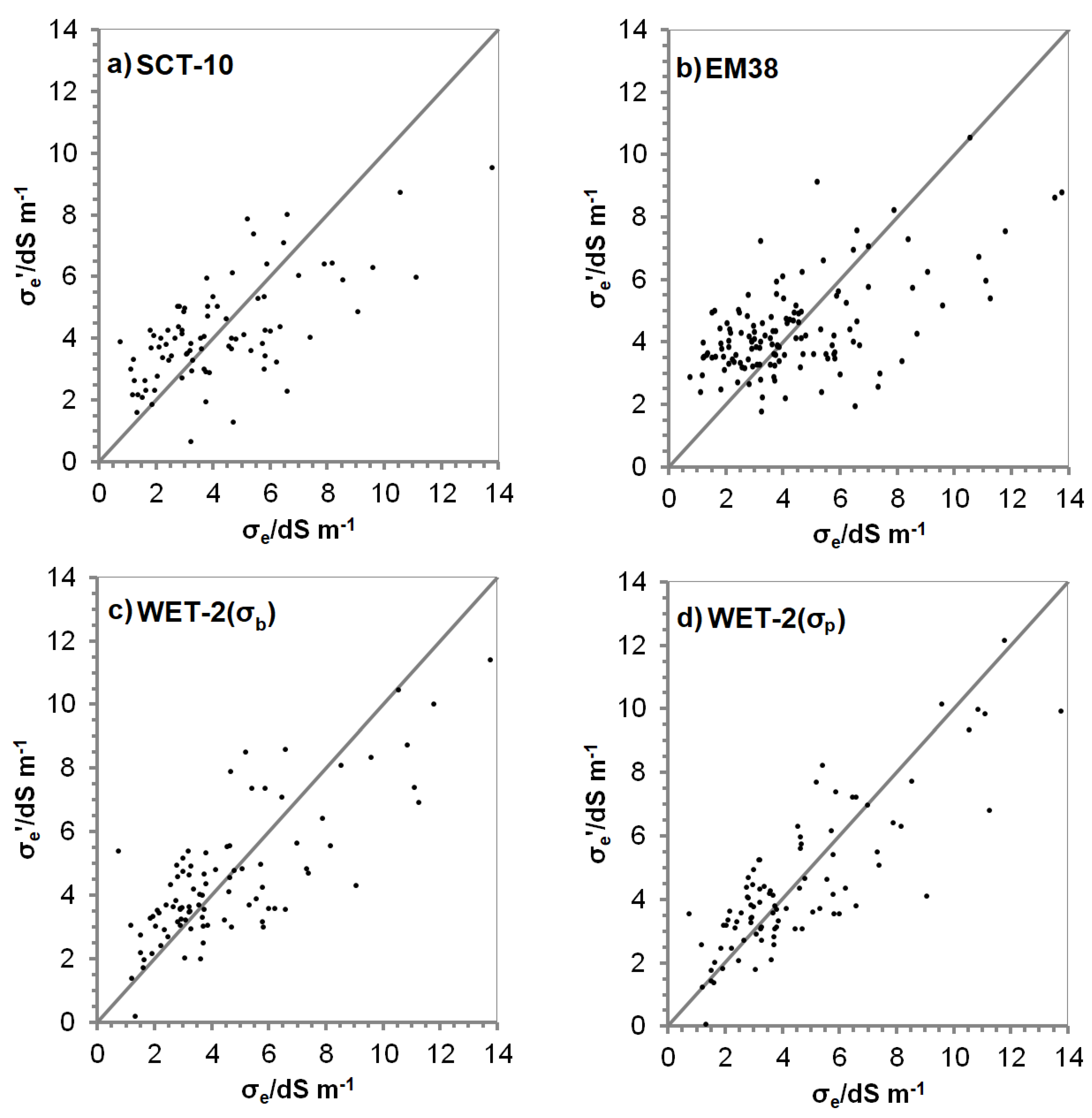
Certainly, the inclusion of other soil properties for the estimation of the
σe and thus salinity appraisal improved the prediction, giving rise to models with R
2 and RMSE values of 0.44 and 1.8 dS m
−1, 0.34 and 2.1 dS m
−1, and 0.59 and 1.7 dS m
−1 for, respectively, the SCT-10, the EM38, and the WET-2. Apparently, these model performance coefficients do not compare well with the ones obtained in other works, e.g., Zemni et al. [
34] achieved RMSE values below 1 dS m
−1 for a CCC probe, and Samson et al. [
22] R
2 up to 0.98 for CCC and TDR probes. However, compared to theirs and other researchers’, the testing conditions of the study area in this work were very challenging because of its large extension and thus diversity of soils. This fact contrasts with the conditions of the aforementioned studies in which only one sandy soil was tested. Besides, in this work, the estimation of
σe was tried, whereas in the aforesaid and most others’ the easier
σp is tried. In any case, in this work, the use of
θw instead of
ww and the additional use of
ρb would have improved the models. Besides, the use of soil samples more representative of the actual soil volume sensed by the EM38 would have decreased the scattering of predicted against observed
σe and hence increased R
2 and decreased RMSE. Finally, the use of different model approaches would have maybe improved a bit more the models’ prediction ability. Nevertheless, the development of the best possible model for each probe was not the objective of this investigation, but a means to compare among them.
Therefore, what it is interesting is to note that, whatever the case, in order to attain better estimation performances, the soil must be drilled regardless of the instrument that is used, even with the contactless EM38. Additionally, samples should be separately taken from different soil depth intervals and analyzed in the laboratory for field water and clay mass fractions in the case of the SCT-10, and for clay and organic matter mass fractions in the case of the EM38, but not in the case of the WET-2. This way of working overshadows some of the benefits of using sensors in the case of the SCT-10 and even more the EM38. On the contrary, in the case of the WET-2, only probe measurements were needed to develop an MLR model for
σe estimation and therefore for salinity appraisal on the basis of
σb. The use of the sensor-calculated
σp instead of the sensor-measured
σb further improved the
σe estimation reaching a R
2 of 0.69. However, the RMSE was still 1.5 dS m
−1, which is somewhat far from satisfactory since the amplitude interval of the lower classes of salt affected soils is 2 dS m
−1 (
Table 11).
Given that working at higher frequencies is known to attenuate the effects of soil type,
σb and
T on the
εb measurement [
56], the use of frequencies over 20 MHz in WET-2-like FDR and TDR sensors such as the CS655 (Campbell Scientific, Inc., Logan, UT, USA), which uses two frequencies of 175 MHz and 100 MHz in order to better characterize
σb and thus refine the
εb measurement [
57], is expected to enhance the soil salinity appraisal with the aim of diminishing the RMSE down to more acceptable values while keep using only sensor data.
6. Conclusions
The field comparison made between three classical commercial devices capable of EC detection, each one featuring a different physical foundation, i.e., ER, EMI, and FDR, revealed several interesting things related to the evolution the technology for field soil salinity appraisal has witnessed in the past forty years. The comparison has shown, first of all, that the use of one specific device determines the way of working not only because of the physical foundation of the σb measurement, but also because of the add-ons the specific devices include. These extra features can be additional measurements such as temperature, which is naturally and easily integrated with the aid of a built-in thermistor alongside contact techniques like ER (SCT-10) and FDR (WET-2), and relative dielectric permittivity, which can only be implemented in FDR and TDR technologies or integrated with the aid of the two-electrode ER technique in combined probes such as the modern capacitance-conductance (CCC) ones. These extra features can also be additional calculations such as the temperature-standardized σb,25, as well as θw and σp in FDR and TDR or CCC. Regarding temperature, it has been also shown that the evolution of temperature in aqueous solutions does not represent the evolution in bulk soils and that an alternative should be chosen, e.g., another factor in the framework of an MLR model. Finally, in this work it has been shown that an FDR contact probe like the WET-2 not only provided the best estimation model making use of the additional σp calculation, but also provided a balance between labor and information obtained because, even though with this contact device soil drilling is necessary to access the subsoil layers, it is also the only one in which soil sampling and laboratory analysis are not needed at all to develop a σe estimation model. The ongoing development of light weight non expensive FDR and TDR probes, specifically working at higher frequencies for enhanced εb and σb estimations, offers a promising way in which salinity appraisal is going to improve and made available for a greater audience. In the future, similar comparisons will be made, including the most recent commercial TDR and CCC probes.






{kind=link}
{kind=link}
{kind=link}