
Innovative Double Dumbbell-Shaped Flux-Switching Linear Tube Generator for Ocean Wave Energy Conversion: Design, Simulation, and Experimental Validation



Abstract
1. Introduction
2. Methodology
2.1. The Design
2.2. Star and Delta Connected Coil Phases of the Double-Dumbbell Linear Generator
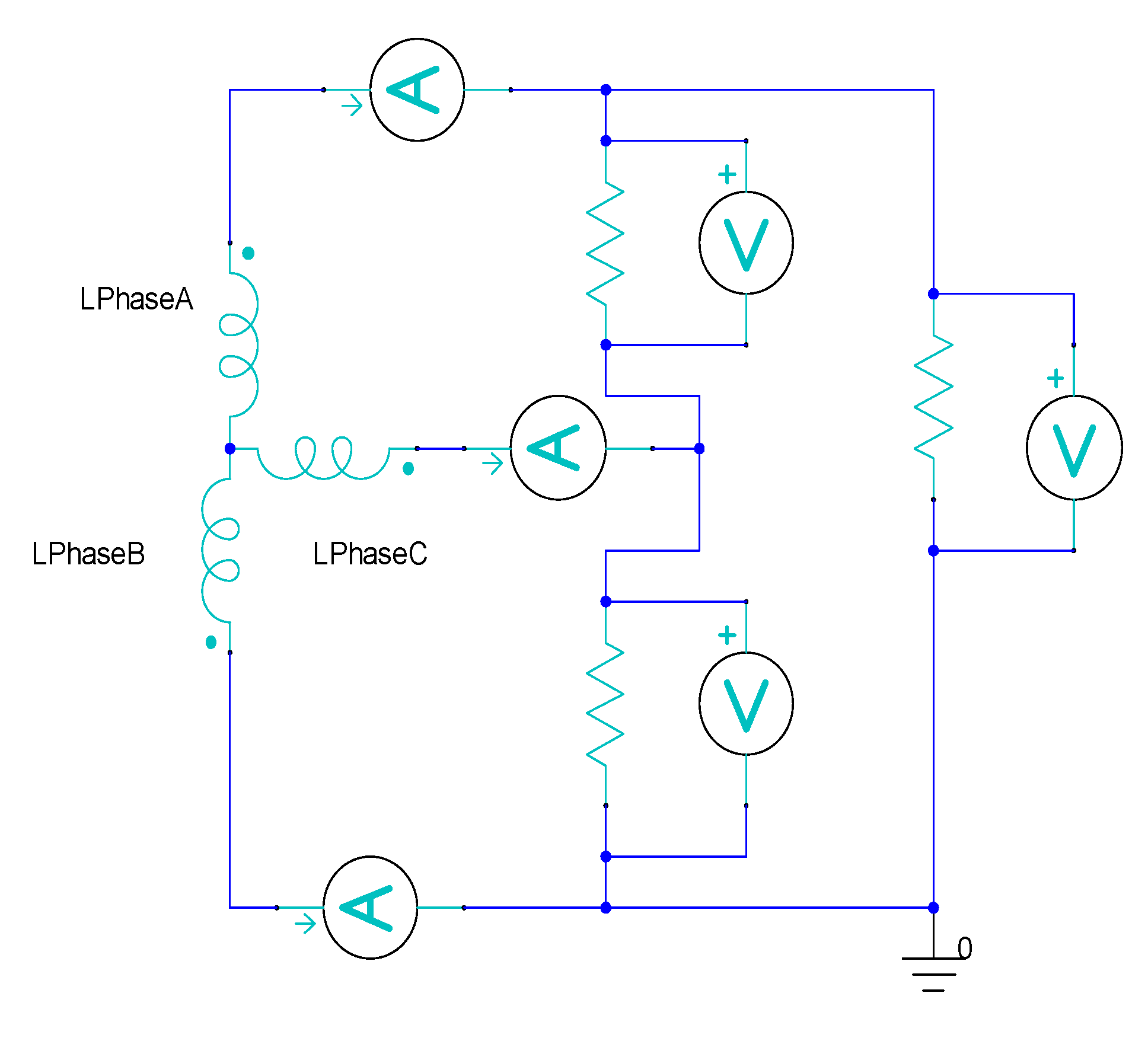
2.2.1. Star Coil Phase Connection of the DDFSLG in ANSYS Electronics Software Model
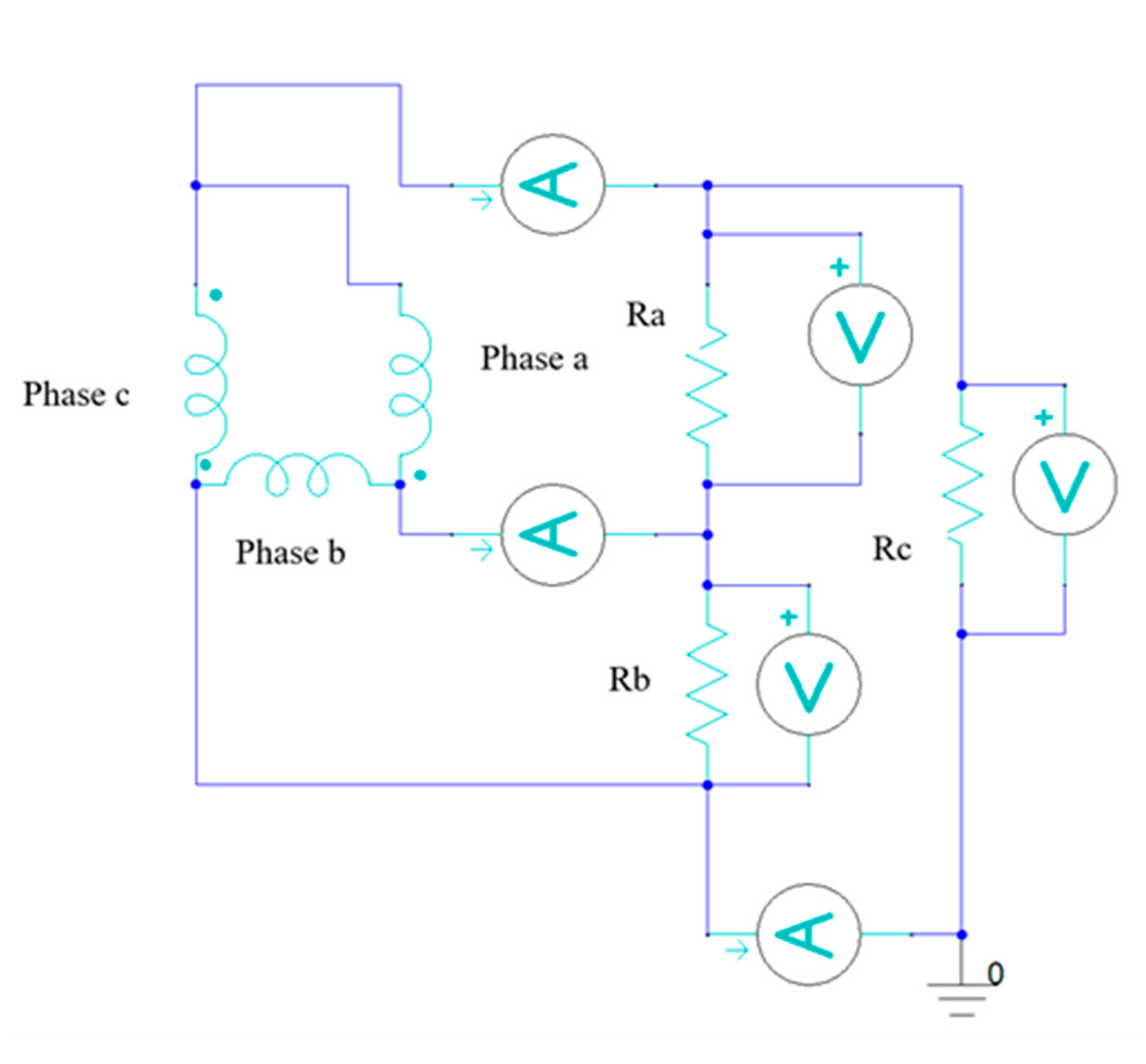
2.2.2. Delta Coil Phase Connection of the DDFSLG in ANSYS Electronics Software Model
2.3. Analytical Model for the WEC of the DDFSLG Under Irregular Waves
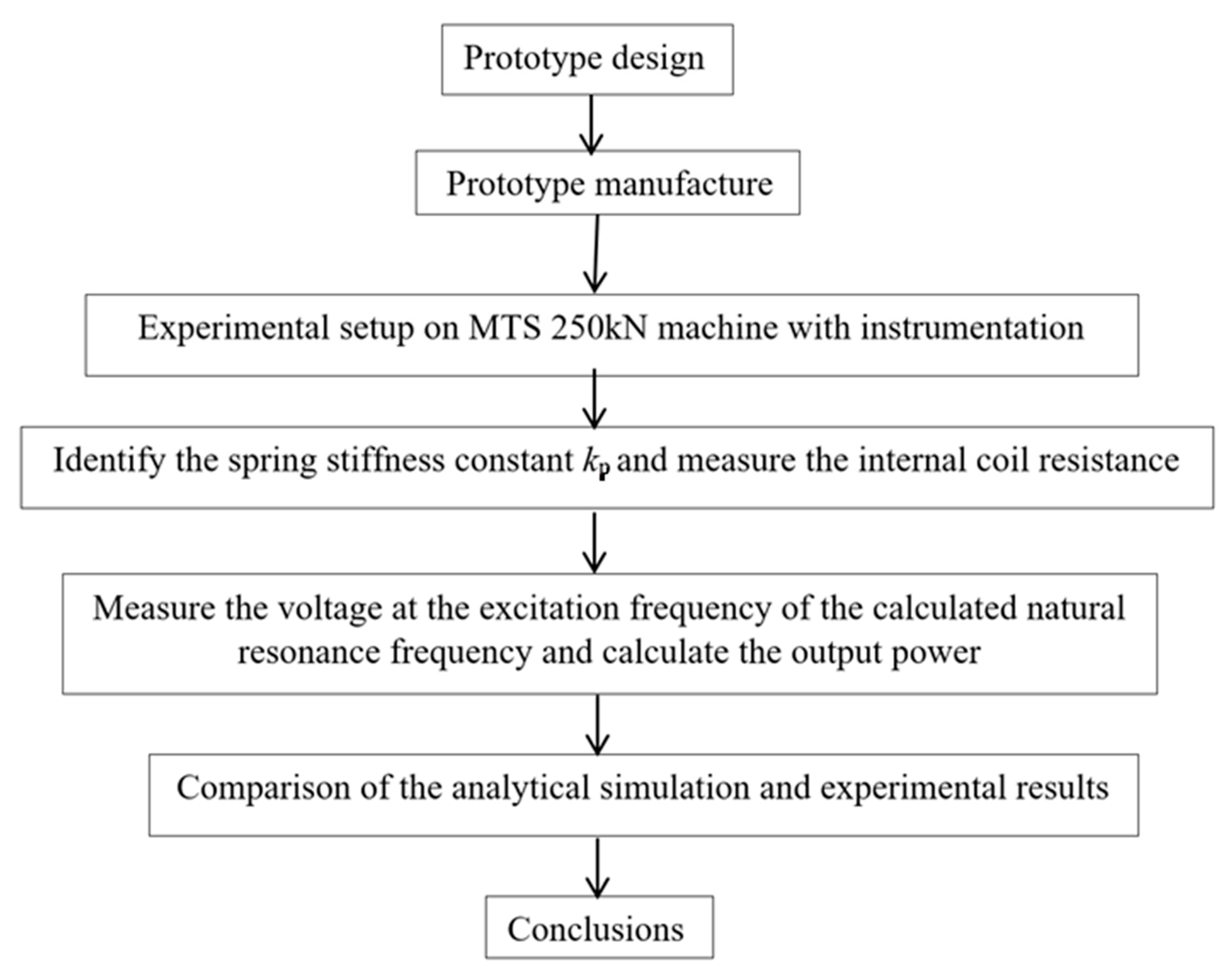
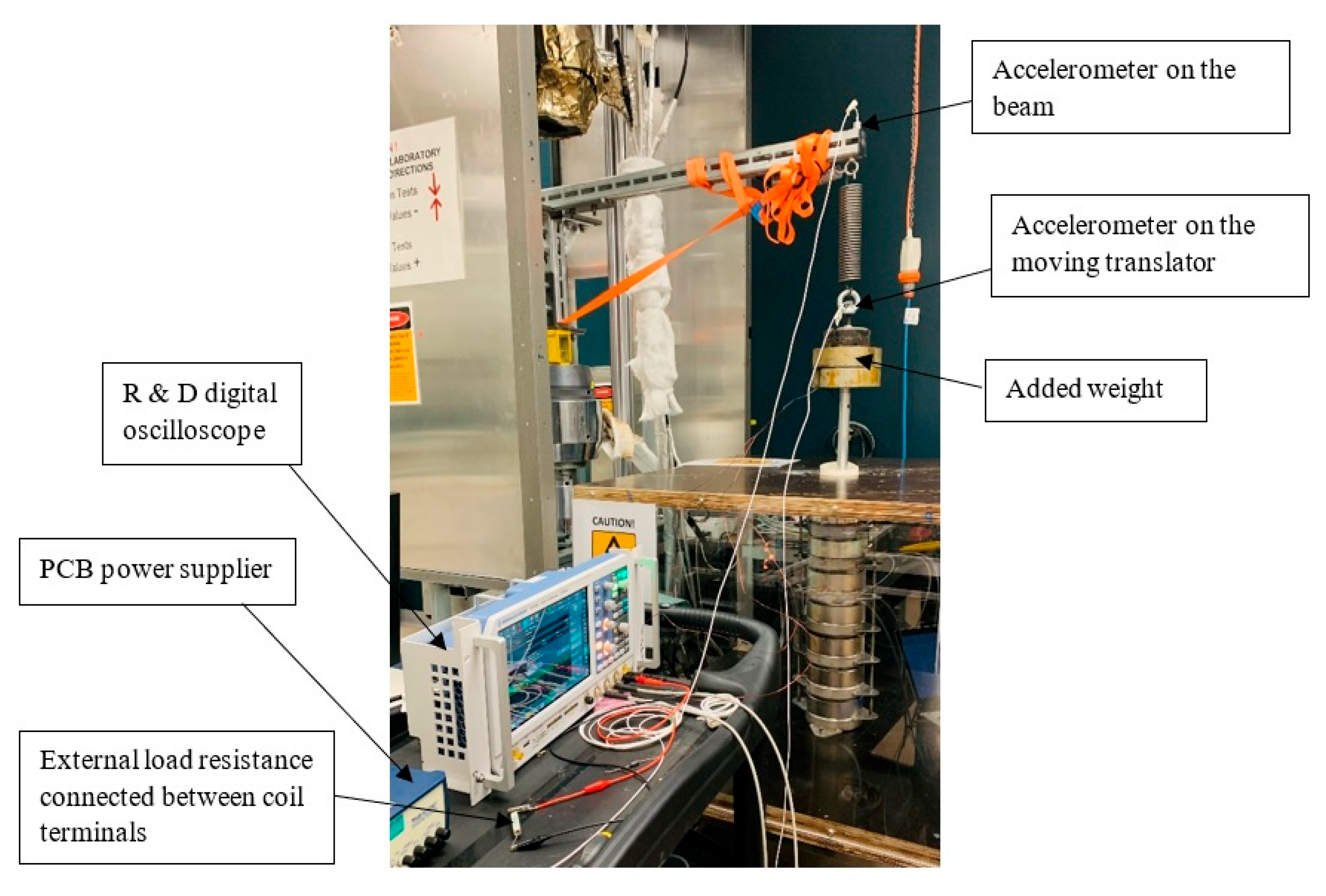
2.4. Experimental Validation
- Installing the prototype on an MTS machine;
- Measuring the spring constant using Hooke’s law;
- Observing voltage output across external load resistances (4 Ω, 5 Ω, 7 Ω, 10 Ω, 15 Ω, 26 Ω);
- Comparing experimental results with theoretical predictions.
2.4.1. Experimental Methodology
2.4.2. Experiment Procedure
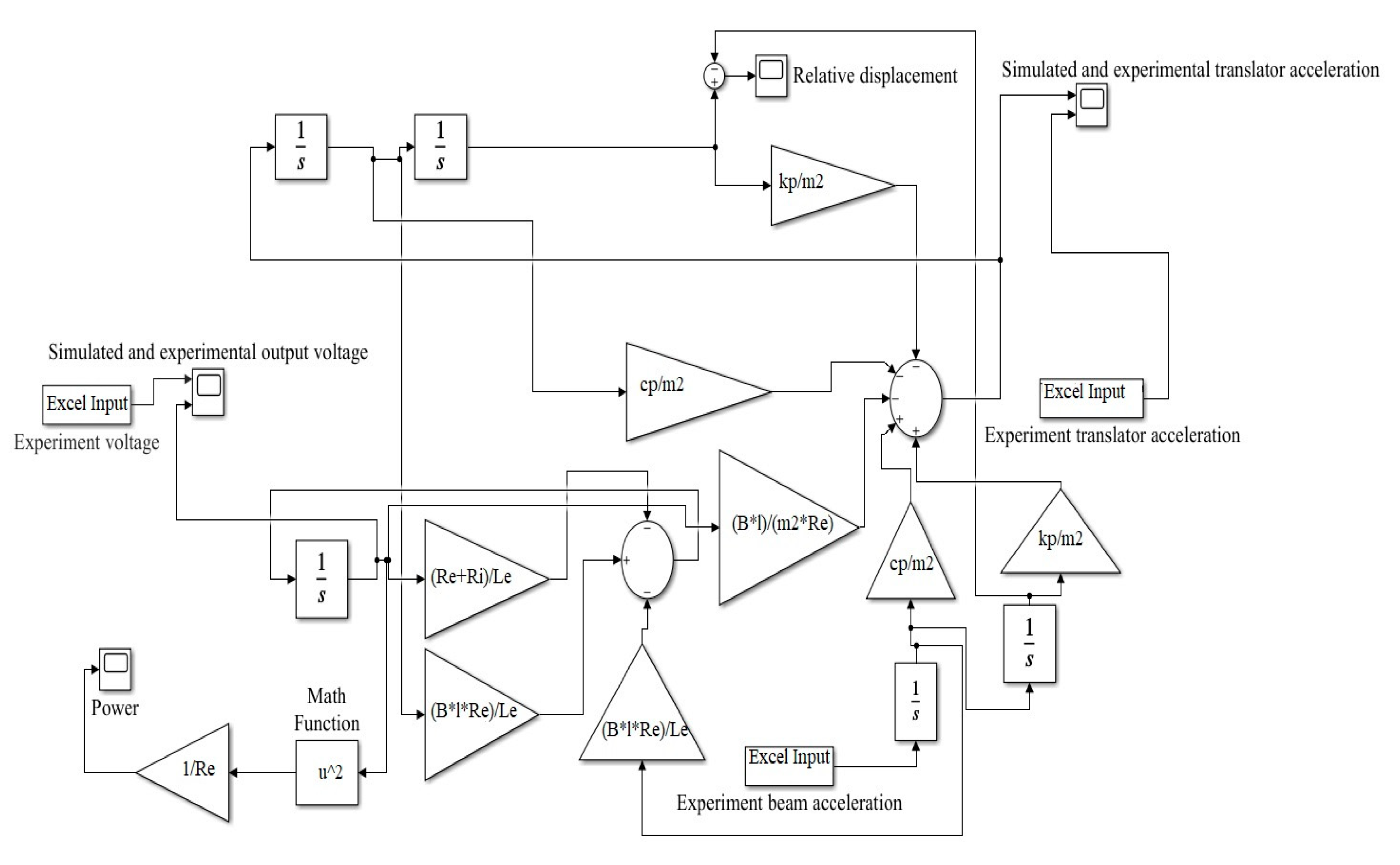
2.4.3. Analytical Simulation Model for the DDFSLG Testing Device
3. Results and Discussion
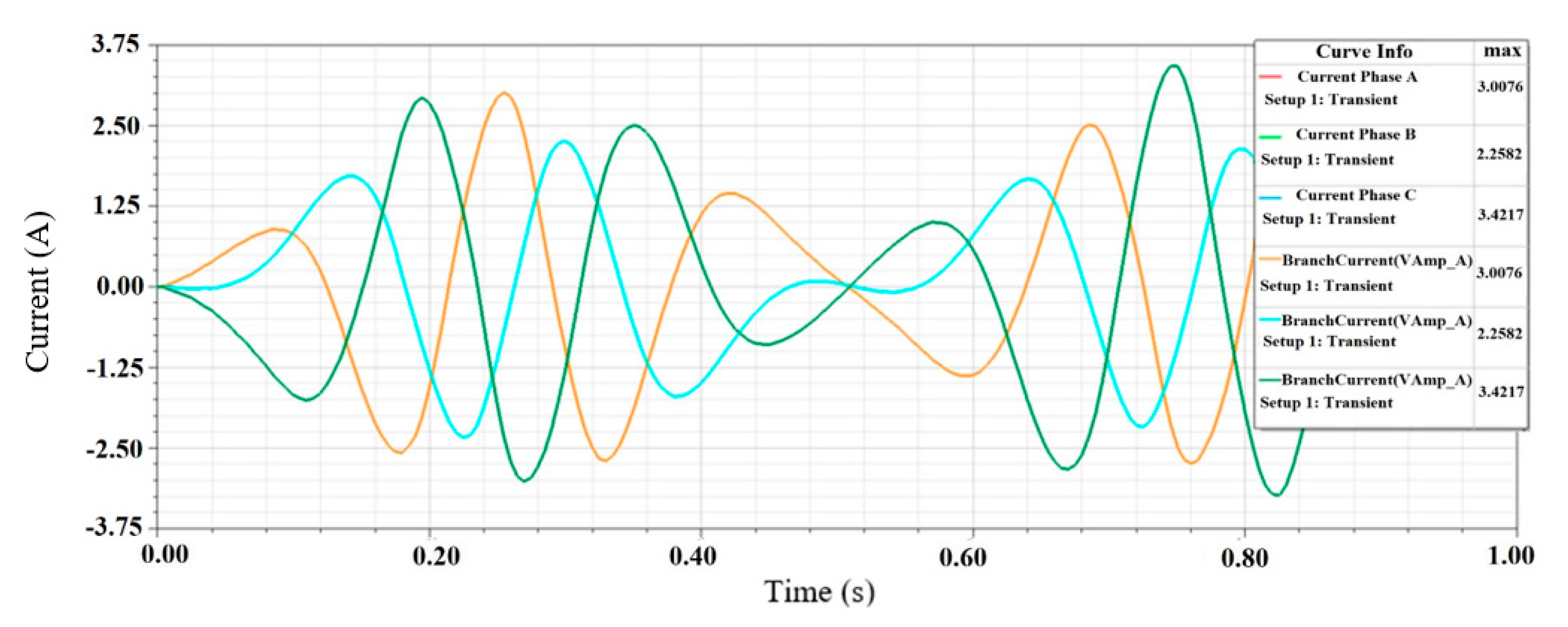
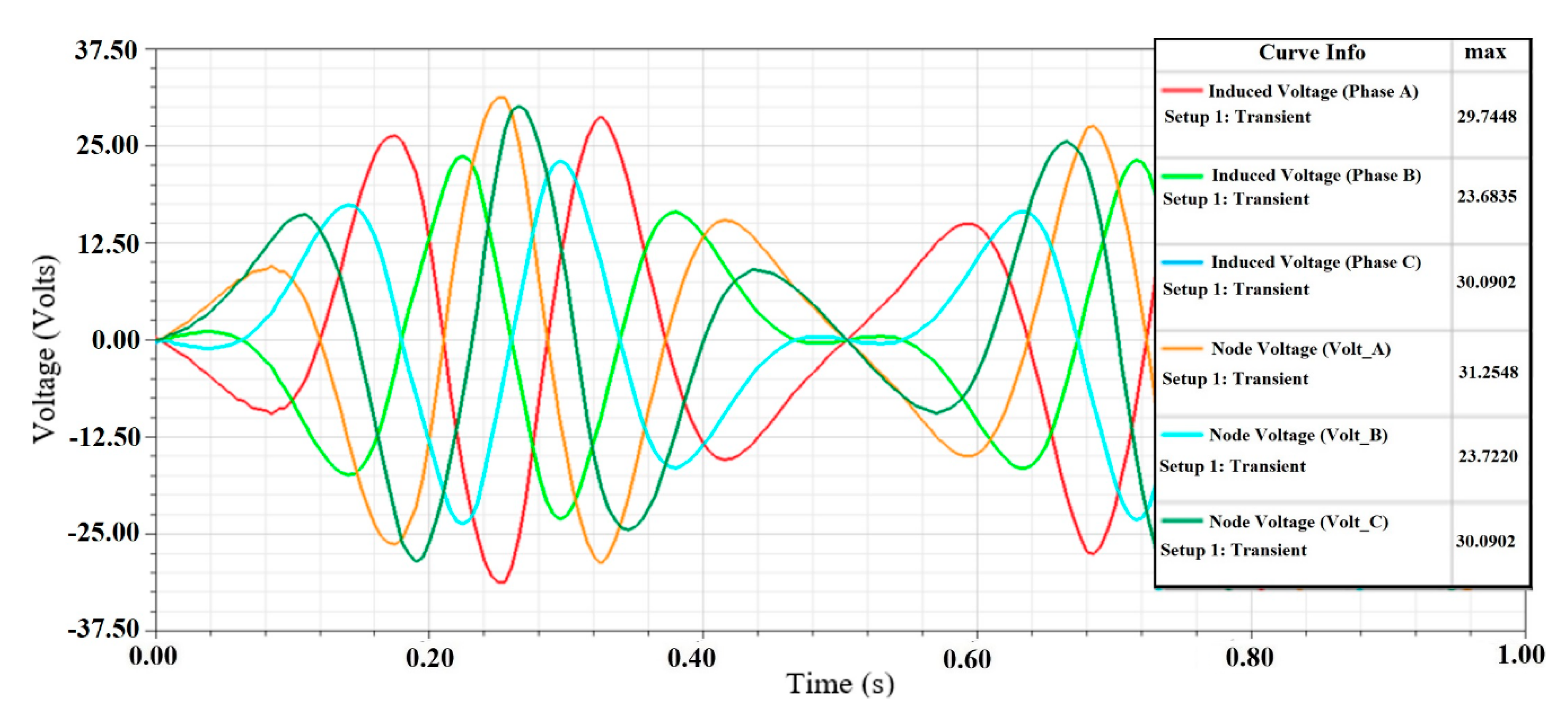
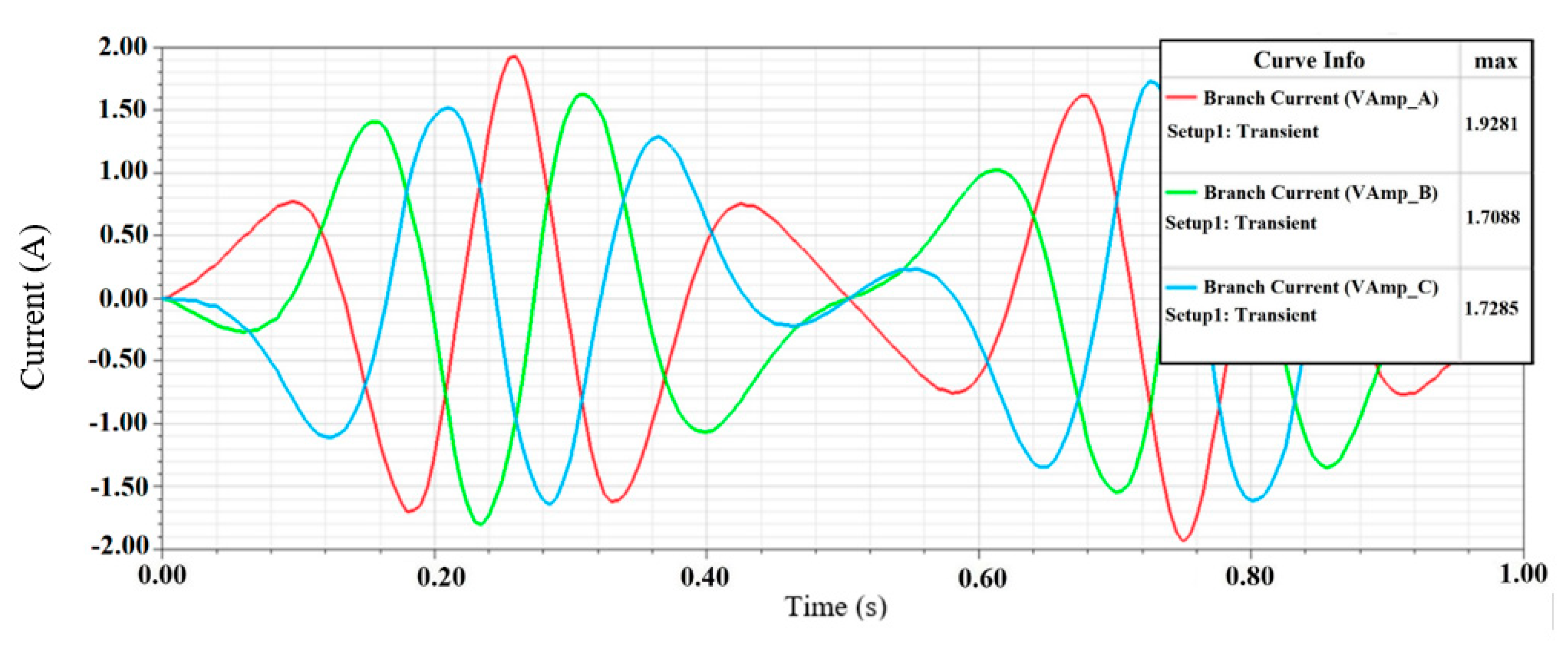
3.1. Simulation Results of Output Voltages and Currents of Each Coil Phase for the DDFSLG of the Star (Wye) and Delta Coil Phase Connections
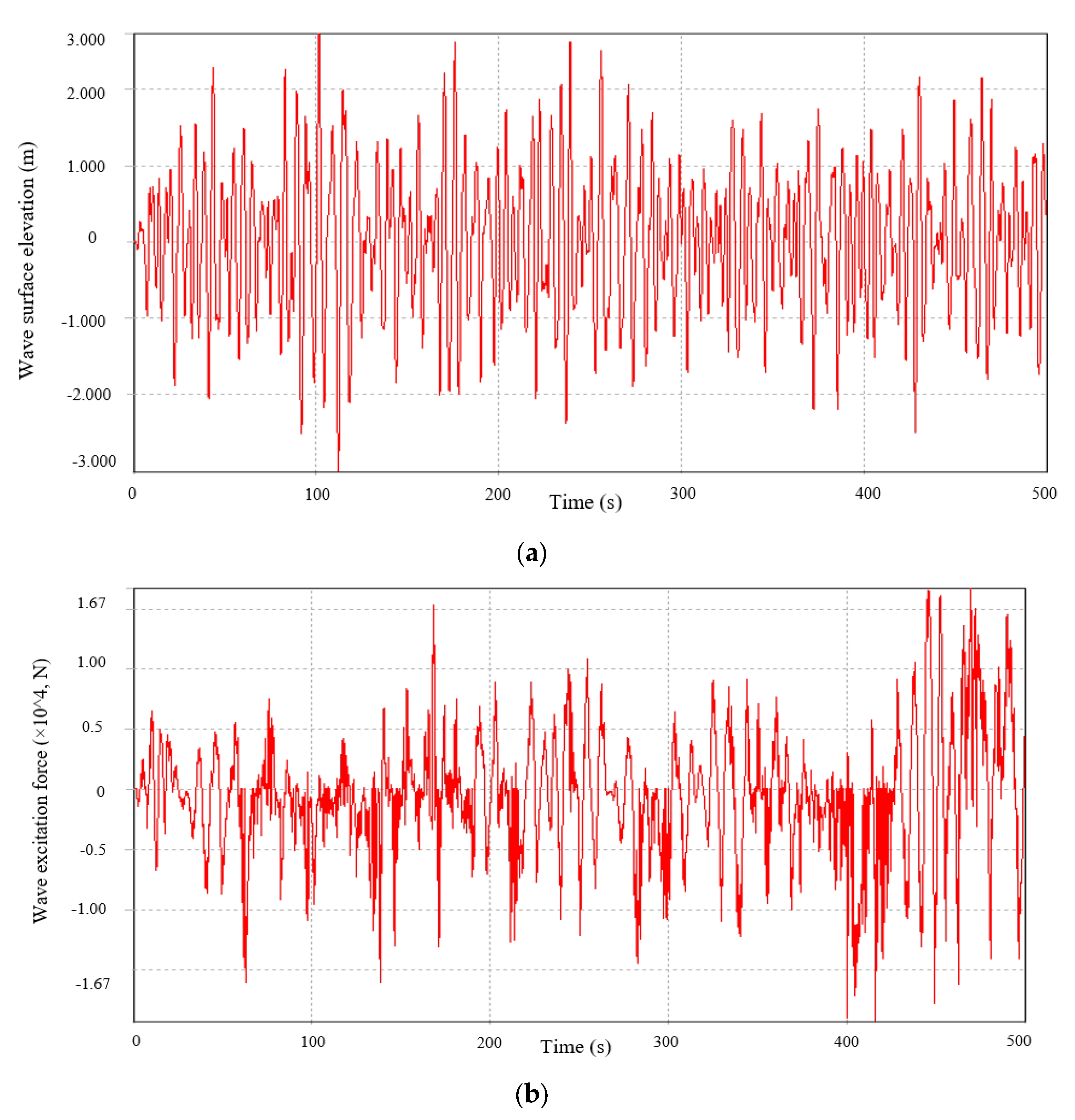
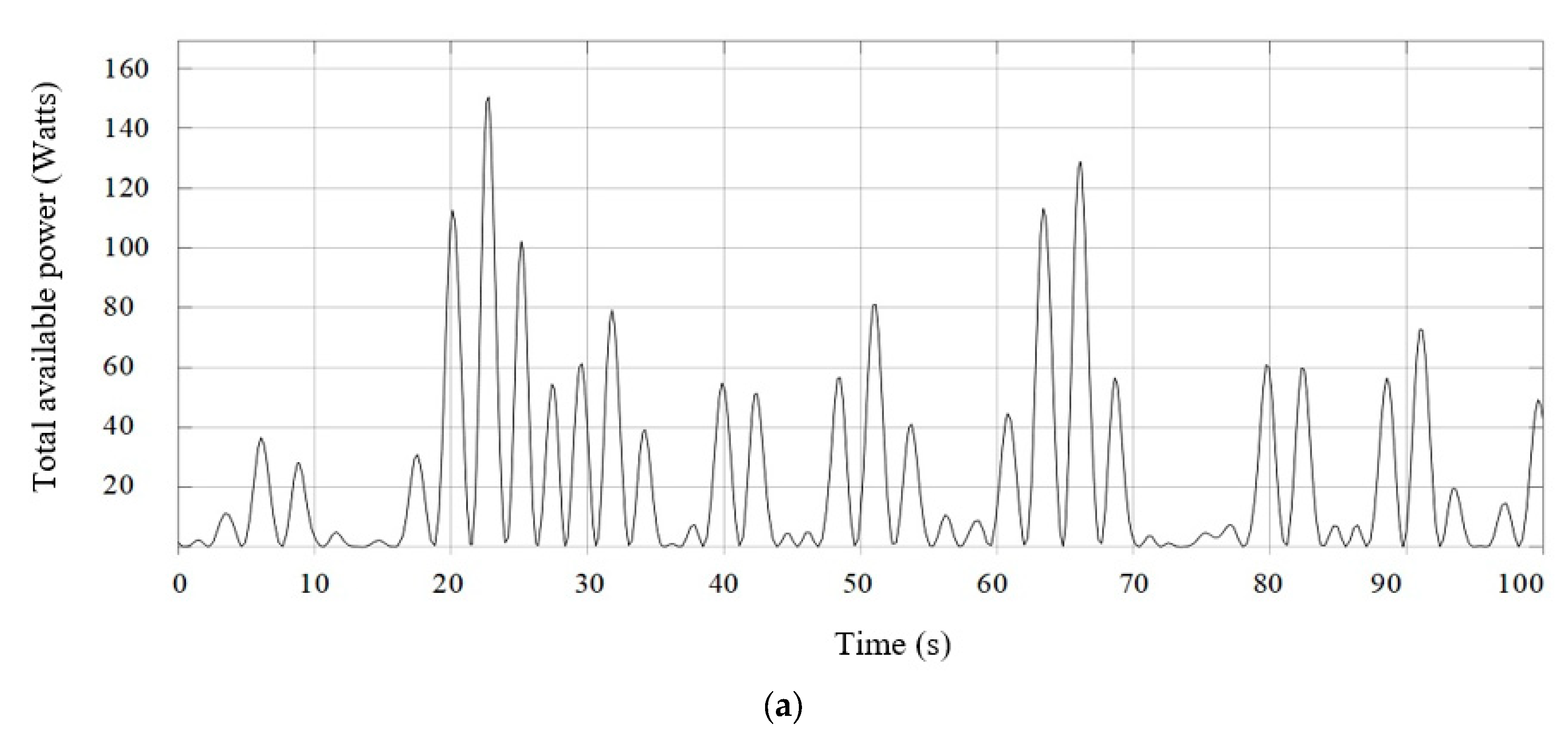
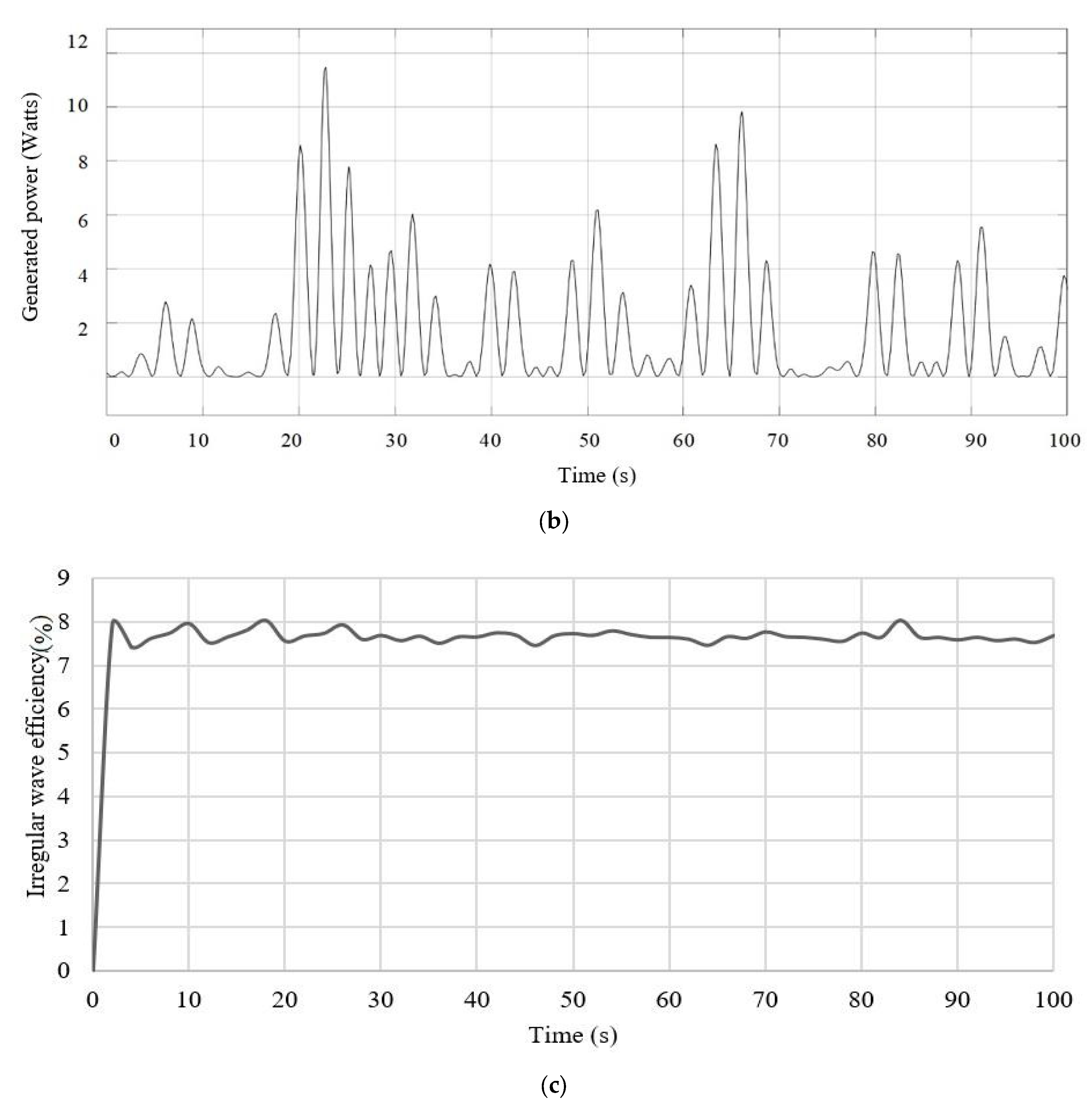
3.2. Simulation Results of Wave Excitation Force and WEC Dynamic Simulation Under Irregular Waves
3.3. Experimental Results
3.3.1. Testing Results of the Prototype at the Excitation Frequency of 0.7325 Hz and External Load Resistance of 7 Ohm
3.3.2. Identification of Magnetic Flux Density B and Damping Coefficient cp by Matching Experimental and Simulated Results
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
References
- Falnes, J. A review of wave energy extraction. Mar. Struct. 2007, 20, 185–201. [Google Scholar] [CrossRef]
- Young, I.R. Seasonal variability of the global ocean wind and wave climate. Int. J. Climatol. 1999, 19, 931–950. [Google Scholar] [CrossRef]
- Hughes, M.G.; Heap, A.D. National-scale wave energy resource assessment for Australia. Renew. Energy 2010, 35, 1783–1791. [Google Scholar] [CrossRef]
- Lopes, M.F.P.; Hals, J.; Gomes, R.P.F.; Moan, T.; Gato, L.M.C.; Falcao, A.F.O. Experimental and numerical investigation of non-predictive phase-control strategies for a point-absorbing wave energy converter. Ocean Eng. 2009, 36, 386–402. [Google Scholar] [CrossRef]
- Margheritini, L.; Vicinanza, D.; Frigaard, P. SSG wave energy converter: Design, reliability, and hydraulic performance of an innovative overtopping device. Renew. Energy 2009, 34, 1371–1380. [Google Scholar] [CrossRef]
- Martinelli, L.; Zanuttigh, B.; Kofoed, J.P. Selection of design power of wave energy converters based on wave basin. Renew. Energy 2011, 36, 3124–3136. [Google Scholar] [CrossRef]
- Rusu, E.; Guedes Soares, C. Coastal impact induced by a pelamis wave farm operating in the Portuguese near shore. Renew. Energy 2013, 58, 34–49. [Google Scholar] [CrossRef]
- Son, D.; Belissen, V.; Yeung, R.W. Performance validation and optimization of a dual coaxial-cylinder ocean-wave energy extractor. Renew. Energy 2016, 92, 192–201. [Google Scholar] [CrossRef]
- Su, Y.; You, Y.; Zheng, Y. Investigations on the oscillating buoy wave power devices. China Ocean Eng. 2002, 16, 141–149. [Google Scholar]
- Khatri, P.; Wang, X. Comprehensive review of a linear electrical generator for ocean wave energy conversion. IET Renew. Power Gener. 2019, 14, 949–958. [Google Scholar] [CrossRef]
- Farrok, O.; Islam, M.R.; Sheikh, M.R.I.; Guo, Y.; Zhu, J.G. A split translator secondary stator permanent magnet linear generator for oceanic wave energy conversion. IEEE Trans. Ind. Electron. 2017, 65, 7600–7608. [Google Scholar] [CrossRef]
- Huang, L.; Hu, B.; Hu, M.; Liu, C.; Zhu, H. Research on primary excitation fully superconducting linear generators for wave energy conversion. IEEE Trans. Appl. Supercond. 2019, 29, 2903573. [Google Scholar] [CrossRef]
- Huang, L.; Hu, M.; Liu, J.; Yu, H.; Zeng, C.; Chen, Z. Electromagnetic design of a 10-kW-class flux-switching linear superconducting hybrid excitation generator for wave energy conversion. IEEE Trans. Appl. Supercond. 2017, 27, 2656620. [Google Scholar] [CrossRef]
- Liu, Z.; Wang, X.; Ding, S.; Zhang, R.; McNabb, L. A new concept of speed amplified nonlinear electromagnetic vibration energy harvester through fixed pulley wheel mechanisms and magnetic springs. J. Mech. Syst. Signal Process 2019, 126, 305–325. [Google Scholar] [CrossRef]
- Liu, Z.; Xiao, H.; Khatri, P.; Wang, X. A study of a flux switching linear generator with a novel speed amplified mechanism and its optimization for the maximum power output and minimum cogging force of wave energy conversion. Mech. Syst. Signal Process. 2022, 166, 108413. [Google Scholar] [CrossRef]
- Huang, L.; Liu, J.; Yu, H.; Qu, R.; Chen, H.; Fang, H. Winding configuration and performance investigations of a tubular superconducting flux-switching linear generator. IEEE Trans. Appl. Supercond. 2014, 25, 1–5. [Google Scholar] [CrossRef]
- Zou, Y.; Cheng, K.W.E. A Vertical Flux-Switching Permanent Magnet Based Oscillating Wave Power Generator with Energy Storage. Energies 2017, 10, 887. [Google Scholar] [CrossRef]
- Stamenkovic, I.; Milivojevic, N.; Schofield, N.; Krishnamurthy, M.; Emadi, A. Design, analysis, and optimization of ironless stator permanent magnet machines. IEEE Trans. Power Electron. 2013, 28, 2527–2538. [Google Scholar] [CrossRef]
- Farrok, O.; Islam, M.R.; Guo, Y.; Zhu, J.; Xu, W. A novel design procedure for designing linear generators. IEEE Trans. Ind. Electron. 2017, 65, 1846–1854. [Google Scholar] [CrossRef]
- Kimoulakis, N.M.; Kladas, A.G.; Tegopoulos, J.A. Cogging force minimization in a coupled permanent magnet linear generator for sea wave energy extraction applications. IEEE Trans. Magn. 2009, 45, 1246–1249. [Google Scholar] [CrossRef]
- He, J.H. Periodic solution of a micro-electromechanical system. Facta Univ. Ser. Mech. Eng. 2024, 22, 187–198. [Google Scholar] [CrossRef]
- Tian, D.; Ain, Q.T.; Anjum, N.; He, C.H. Fractal N/MEMS: From pull-in instability to pull-in stability. Fractals 2021, 29, 2150030. [Google Scholar] [CrossRef]
- Molla, S.; Farrok, O.; Alam, M.J. Sustainable solution to the critical challenges of an oceanic wave farm for maximizing power generation. Renew. Energy 2024, 237 Pt A, 121461. [Google Scholar] [CrossRef]
- Tian, D.; He, C.H. A fractal micro-electromechanical system and its pull-in stability. J. Low Freq. Noise Vib. Act. Control. 2021, 40, 1380–1386. [Google Scholar] [CrossRef]
- He, C.H. A variational principle for a fractal nano/microelectromechanical (N/MEMS) system. Int. J. Numer. Methods Heat Fluid Flow 2023, 33, 351–359. [Google Scholar] [CrossRef]
- Khatri, P.; Wang, X. Design parameter sensitivity analysis and performance prediction of a novel direct drive double dumbbell flux switching linear generator. J. Ocean Eng. Mar. Energy 2022, 8, 65–82. [Google Scholar] [CrossRef]
- Khatri, P.; Liu, Z.; Rudolph, J.; Wang, X. A study of a modified design of Dumbbell-Shaped Flux Switching Tubular Linear generator for regular wave energy conversion. Renew. Energy 2023, 208, 287–300. [Google Scholar] [CrossRef]
- Liu, C.; Yu, H.; Hu, M.; Liu, Q.; Zhou, S.; Huang, L. Research on a permanent magnet tubular linear generator for direct drive wave energy conversion. IET Renew. Power Gener. 2014, 8, 281–288. [Google Scholar] [CrossRef]
- Beig, A.R. Three-phase AC supply. In Electric Renewable Energy Systems; Elsevier: Amsterdam, The Netherlands, 2016; pp. 183–208. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value/Name | ||
|---|---|---|---|
| Speed of translator (m/s) | 1 | ||
| Thickness of PM (mm) | 40 | ||
| Material for PM | NdFeB | ||
| Stator length (mm) | 600 | ||
| Coil internal resistance (Ω) | Phase A | Phase B | Phase C |
| 30 | 22 | 31 | |
| Load resistance (Ω) | Ra | Rb | Rc |
| 30 | 22 | 31 | |
| Parameters | Value |
|---|---|
| Total mass of the buoy and stator (kg) | 800 |
| Mass of the translator of the DDFSLG (kg) | 5.6 |
| Hydrodynamically added mass (kg) at 0.435 Hz | 241 |
| Mechanical damping coefficient of the DDFSLG (Ns/m) | 40 |
| Spring stiffness coefficient of the DDFSLG (N/m) | 398.09 |
| Magnetic flux density (Tesla) | 0.139 |
| Coil inductance (mH) | 3.2 |
| Length of coil l (m) | 219.94 |
| Internal resistance (Ω) | 7 |
| External resistance (Ω) | 7 |
| Design Parameters | Value (mm) |
|---|---|
| Stator length | 600 |
| Translator length | 200 |
| Translator dumbbell outer diameter | 80 |
| Translator dumbbell inner diameter | 45 |
| The outer diameter of the magnet ring on stator slots | 134 |
| The inner diameter of the magnet ring on stator slots | 94 |
| Length of the magnet inside the dumbbell translator | 196 |
| Diameter of the magnet inside the translator | 45 |
| Experimental Prototype Value of Design Parameters | Determined Value |
|---|---|
| Mass of the stator | 22.85 kg |
| Mass of the translator | 5.6 kg |
| Mass of the aluminum rod | 0.6 kg |
| Spring stiffness constant (kp) | 398.09 N/m |
| The internal resistance of the coil (Ri) | 7 Ω |
| The internal inductance of the coil (Le) | 3.2 mH |
| Natural resonant frequency | 0.7328 Hz |
| Number of coil turns | 1000 turns |
| Connection Type | Branch Current (A) | Phase Current (A) | ||||
|---|---|---|---|---|---|---|
| Phase | A | B | C | A | B | C |
| Star | 3.007 | 2.258 | 3.421 | 3.007 | 2.258 | 3.421 |
| Delta | 1.928 | 1.708 | 1.728 | 6.297 | 5.930 | 6.279 |
| Branch Voltage (V) | Phase Voltage (V) | |||||
| Phase | A | B | C | A | B | C |
| Star | 42.683 | 38.707 | 55.208 | 27.647 | 27.615 | 28.124 |
| Delta | 29.744 | 23.683 | 30.090 | 31.254 | 23.722 | 30.090 |
| Branch Power (W) | Phase Power (W) | |||||
| Phase | A | B | C | A | B | C |
| Star | 128.35 | 87.40 | 188.87 | 83.13 | 62.35 | 96.21 |
| Delta | 57.346 | 40.451 | 51.996 | 196.806 | 140.671 | 188.935 |
| The External Load Resistance (Ω) | The Identified Magnetic Flux Density, B (T) | Simulated Peak-to-Peak Voltage Values (V) | Measured Peak-to-Peak Voltage Values (V) | Simulated Peak Power Values (W) | Measured Peak Power Values (W) |
|---|---|---|---|---|---|
| 4 | 0.155 | 1.85 | 1.89 | 0.29 | 0.30 |
| 5 | 0.165 | 2.15 | 2.18 | 0.31 | 0.32 |
| 7 | 0.140 | 2.58 | 2.69 | 0.32 | 0.33 |
| 10 | 0.135 | 2.98 | 3.02 | 0.30 | 0.31 |
| 15 | 0.125 | 3.5 | 3.77 | 0.28 | 0.29 |
| 26 | 0.115 | 4.16 | 4.28 | 0.22 | 0.23 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Khatri, P.; Liu, Z.; Rudolph, J.; Al Shami, E.; Wang, X. Innovative Double Dumbbell-Shaped Flux-Switching Linear Tube Generator for Ocean Wave Energy Conversion: Design, Simulation, and Experimental Validation. Vibration 2025, 8, 32. https://doi.org/10.3390/vibration8020032
Khatri P, Liu Z, Rudolph J, Al Shami E, Wang X. Innovative Double Dumbbell-Shaped Flux-Switching Linear Tube Generator for Ocean Wave Energy Conversion: Design, Simulation, and Experimental Validation. Vibration. 2025; 8(2):32. https://doi.org/10.3390/vibration8020032
Chicago/Turabian StyleKhatri, Pooja, Zhenwei Liu, James Rudolph, Elie Al Shami, and Xu Wang. 2025. "Innovative Double Dumbbell-Shaped Flux-Switching Linear Tube Generator for Ocean Wave Energy Conversion: Design, Simulation, and Experimental Validation" Vibration 8, no. 2: 32. https://doi.org/10.3390/vibration8020032
APA StyleKhatri, P., Liu, Z., Rudolph, J., Al Shami, E., & Wang, X. (2025). Innovative Double Dumbbell-Shaped Flux-Switching Linear Tube Generator for Ocean Wave Energy Conversion: Design, Simulation, and Experimental Validation. Vibration, 8(2), 32. https://doi.org/10.3390/vibration8020032