Abstract
In this paper, we consider a non-standard dynamical inverse problem for the wave equation on a metric tree graph. We assume that the so-called delta-prime matching conditions are satisfied at the internal vertices of the graph. Another specific feature of our investigation is that we use only one boundary actuator and one boundary sensor, all other observations being internal. Using the Neumann-to-Dirichlet map (acting from one boundary vertex to one boundary and all internal vertices) we recover the topology and geometry of the graph together with the coefficients of the equations.
1. Introduction
This paper concerns inverse problems for differential equations on quantum graphs. Under quantum graphs or differential equation networks (DENs) we understand differential operators on geometric graphs coupled by certain vertex matching conditions. Network-like structures play a fundamental role in many problems of science and engineering. The range for the applications of DENs is enormous. Here is a list of a few.
–Structural Health Monitoring. DENs, classically, arise in the study of stability, health, and oscillations of flexible structures that are made of strings, beams, cables, and struts. Analysis of these networks involve DENs associated with heat, wave, or beam equations whose parameters inform the state of the structure, see, e.g., [1].
–Water, Electricity, Gas, and Traffic Networks. An important example of DENs is the Saint-Venant system of equations, which model hydraulic networks for water supply and irrigation, see, e.g., [2]. Other important examples of DENs include the telegrapher equation for modeling electric networks, see, e.g., [3], the isothermal Euler equations for describing the gas flow through pipelines, see, e.g., [4], and the Aw-Rascle equations for describing road traffic dynamics, see e.g., [5].
–Nanoelectronics and Quantum Computing. Mesoscopic quasi-one-dimensional structures such as quantum, atomic, and molecular wires are the subject of extensive experimental and theoretical studies, see, e.g., [6], the collection of papers in [7,8,9]. The simplest model describing conduction in quantum wires is the Schrödinger operator on a planar graph. For similar models appear in nanoelectronics, high-temperature superconductors, quantum computing, and studies of quantum chaos, see, e.g., [10,11,12].
–Material Science. DENs arise in analyzing hierarchical materials like ceramic and metallic foams, percolation networks, carbon and graphene nano-tubes, and graphene ribbons, see, e.g., [13,14,15].
–Biology. Challenging problems involving ordinary and partial differential equations on graphs arise in signal propagation in dendritic trees, particle dispersal in respiratory systems, species persistence, and biochemical diffusion in delta river systems, see, e.g., [16,17,18].
Quantum graph theory gives rise to numerous challenging problems related to many areas of mathematics from combinatoric graph theory to PDE and spectral theories. A number of surveys and collections of papers on quantum graphs appeared in previous years; we refer to the monograph by Berkolaiko and Kuchment, [19], for a complete reference list. The inverse theory of network-like structures is an important part of a rapidly developing area of applied mathematics—analysis on graphs. It is tremendously important for all aforementioned applications. In this paper, we solve a non-standard dynamical inverse problem for the wave equation on a metric tree graph.
Let be a finite compact and connected metric tree (i.e., graph without cycles), where V is a set of vertices and E is a set of edges. We recall that a graph is called a metric graph if every edge is identified with an interval of the real line with a positive length We denote the boundary vertices (i.e., vertices of degree one) by , and interior vertices (whose degree is at least 2) by . The vertices can be regarded as equivalence classes of the edge end points . For each vertex , denote its degree by . We write if where is the set of edges incident to
The graph determines naturally the Hilbert space of square integrable functions We define its subspace as the space of functions y on such that for every and and let be the dual space to . When convenient, we denote the restriction of a function w on to by . For any vertex and function on the graph, we denote by the derivative of at in the direction pointing away from the vertex.
Our system is described by the following initial boundary value problem (IBVP) with so-called delta-prime compatibility conditions at each internal vertex :
Here, T is arbitrary positive number, for all j, and . The physical interpretation of conditions (3) and (4), and some other matching conditions was discussed in [20].
The well-posedness of this system is discussed in Section 2; it will be proved that In what follows, we refer to as the root of and f as the control.
We now pose our inverse problem. Assume an observer knows the boundary condition (5), and that (6) holds at the other boundary vertices, and that the graph is a tree. The unknowns are the number of boundary vertices and interior vertices, the adjacency relations for this tree, i.e., for each pair of vertices, whether or not there is an edge joining them, the lengths , and the function q. We wish to determine these quantities with a set of measurements that we describe now. We can suppose is the interior vertex adjacent to with the edge joining the two, see Figure 1. Our first measurement is then the following measurement at :
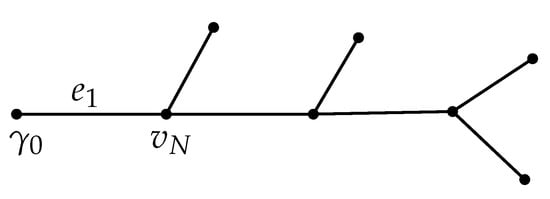
Figure 1.
A metric tree.
We show that from operator one can recover and the degree of . Then by a well known argument, see [21], one can then determine .
Having established these quantities, in our second step, we propose to place sensors on the edges incident to , and using these measurements together with to determine the data associated to these edges. Note that the one control remains at . The goal is to repeat these steps until all data associated to the graph have been determined. To define the interior measurements we require more notation. For each interior vertex we list the incident edges by . Here is chosen to be the edge lying on the unique path from to , and the remaining edges are labeled randomly, see Figure 2. Then the sensors measure
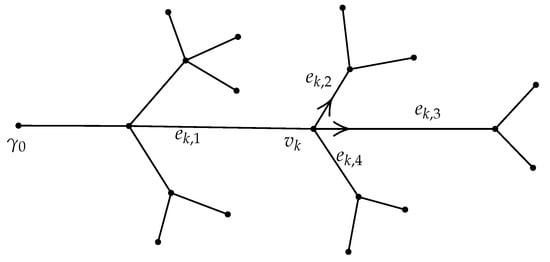
Figure 2.
Sensors at vertex marked by arrows.
We show that we do not need sensors at . Thus the total number of sensors is . It is easy to check that this number is equal to We denote by the -tuple acting on
2. Results
Let ℓ be equal to the maximum distance between and any other boundary vertex. Our main result is the following
Theorem 1.
Assume for all Suppose . Then from one can determine the number of interior and boundary vertices, the adjacency relations of the tree, q, and the lengths of the edges.
3. Discussion
We now compare this result to others in the literature. We are unaware of any works treating the inverse problem on general tree graphs with delta-prime conditions on the internal vertices. The most common conditions for internal vertices are continuity together with Kirchhoff–Neumann condition: and all references in this paragraph assume these conditions. In [21], the authors assume that controls and measurements take place at all boundary vertices but one. The authors use an iterative method called “leaf peeling”, where the response operator on is used first to determine the data on the edges adjacent to the boundary, and then to determine the response operator associated to a proper subgraph. In [21], the leaf peeling argument includes spectral methods that require knowing for all T. In [22], the methods of [21] are extended to the case where masses are placed at internal vertices, see also [23]; however these methods still require knowledge of for all T. Also in [22], it is proven that that for a single string of length ℓ with N attached masses and , is sufficient to solve the inverse problem. In particular, [23] uses a spectral variant of the boundary control method, together with the relationship between the response operator and the connecting operator. In [24,25], a dynamical leaf peeling argument is developed for a tree with no masses and with response operators at all but one boundary points, allowing for the solution of the inverse problem for finite T sufficiently large. An important ingredient in their leaf peeling is determining the response operators associated with subtrees, called “reduced response operators”, from the response operator associated to the original tree. In all of these papers, it is assumed that there are no interior measurements. In [26], the iterative methods from [24,25,27] are adapted to a tree with masses placed at internal vertices, with a single control at the roof and measurements there and at internal vertices. For other works on quantum graphs, see [1,16,19,28,29,30,31].
A special feature of the present paper is that we use only one control together internal observations. This may be useful in some physical settings where some or most boundary points are inaccessible. Another potential advantage of the method presented here is that we recover all parameters of the graphs, including its topology, from the -tuple response operator acting on In previous papers, the authors recovered the graph topology from a larger number of measurements: the matrix (boundary) response operator or, equivalently, from Titchmarsh–Weyl matrix function. In [32], the inverse problems on a star graph for the wave equation with general self-adjoint matching conditions was solved by the matrix boundary response operator.
4. Materials and Methods
4.1. Preliminaries
In what follows, we use the notations
where are the standard Sobolev spaces. We define the Heaviside function by for , and for . Then, we define as the unique solution to
at times we use resp. for resp. Here denotes the Dirac delta function supported at . In this section and those that follow, we drop the superscript T from when convenient.
Consider a star shaped graph with edges . For each j, we identify with the interval and the central vertex with , see Figure 3.
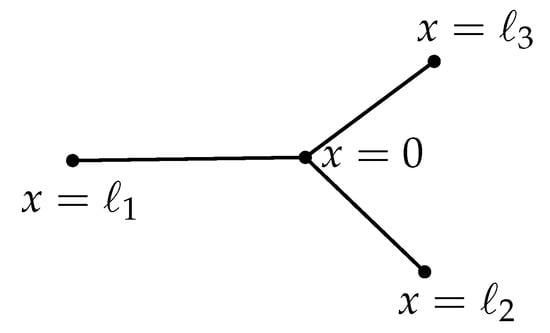
Figure 3.
Star with coordinate system: identified with .
Recall the notation , and . Thus, we consider the system
For (11), it is standard that the waves have unit speed of propagation on the interval, so for and all j. It will be useful first to consider the vibrating string on an interval.
4.2. Representation of Solution on an Interval and Reduced Response Operator
We adapt a representation of developed in [27], where only Dirichlet control and boundary conditions were considered. Fix . We extend to as follows: first evenly with respect to , and then periodically. Thus for all positive integers k.
Define to be the solution to the Goursat-type problem
A proof of solvability of this problem can be found in [33].
Consider the IBVP on the interval :
In what follows, we only consider for some finite T, so all sums will be finite.
Let us now change the condition (20) to . In this case, the solution becomes
To represent the solution of the wave equation on the edge in a star graph, we must account for the control at . Thus it will also be useful to represent the solution of a wave equation on an interval when the control is on the right end. Consider the IBVP:
Set , and extend to by . Define to be the solution to the Goursat-type problem
Let . One can then verify that
Thus
Theorem 2.
(b) For each , the mapping is a continuous mapping .
Proof.
On with , the wave will be generated by the “control” , whereas on the wave is generated by the two controls , . We assume first that .
Let
Note that has already been explicitly determined in (23). Thus, by (21), we have an explicit solution for if we can solve for p. We now prove the existence, uniqueness, and regularity of P.
We remark that at the moment, we have not yet solved for either P or for any j. Let
We solve for P with an iterative argument using steps of length . The iterations are necessary because the upper limits in the sums in (27), (28) increase with time due to reflections of the wave at the various vertices. In what follows, we label by various terms that we have already solved for, which by (24), includes . For we have by unit wave speed that . Suppose now . Then,
and hence for , for all j with . By (13), we have
and hence from (27) and (28) we get
It is easy to show that this is a Volterra equation of the second kind (VESK), and so admits a unique solution P with . Furthermore, by differentiating this equation we get .
Having solved for P on , we now suppose . Thus for any j and any , we have , so all terms in (27), (28) involving , with and , are known. Thus by (27), (28), and
We can solve this VESK to determine uniquely for , with the estimate holding. Iterating this process, we solve for the unique for as desired. The case for is then obtained by continuity. Part (a) of the Theorem follows easily from (21),(23), and (26). Part (b) of the theorem follows from Part (a) and (27) and (28). □
Define
Proposition 1.
For one can determine , , and N.
Proof.
Thus, we have , where denotes various continuous functions. We have by (22)
Clearly, the discontinuity at gives us and N. That determines is proven in [16]. □
Define the “reduced response operator” on , with , by
associated to the IBVP (17)–(20). From (21), we immediately obtain
Lemma 1.
For , and any , we have
with
with If T is finite, the sums above are finite.
In what follows, we refer to as the “reduced response function”. For , we denote the solution to the system (10)–(15) as . We also use the following.
Lemma 2.
Let . For , we have
Here , and for , and .
This result holds from the proof of Theorem 2, the unit speed of wave propagation, and the properties of wave reflections off , see [33]. The details are left to the reader.
The following result follows from (22), (25), and Lemma 2. The details of the proof are left to the reader.
Corollary 1.
Let . For , we have
Here , and for , .
4.3. Solution of Inverse Problem
Here, we establish some notation. We recall the following notation: for we list the incident edges by . Here, is chosen to be the edge lying on the path from to , and the remaining edges are labeled randomly.
Now let be some fixed interior vertex, and let satisfy . Denote by the unique subtree of having as root with incident edge , and by the set of its vertices, see Figure 4.
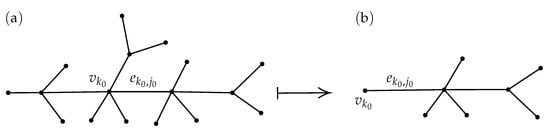
Figure 4.
(a) , (b) Subtree .
We define an associated response operator as follows. Let be the boundary vertices on . Suppose solves the IBVP
Then we define an associated reduced response operator
with associated response function
Suppose we determined . It would follow from Proposition 1 that one could recover the following data: , , and , where is the vertex adjacent to in . In this section we will present an iterative method to determine the operator from the -tuple of operators, , which we know by hypothesis for some . An important ingredient is the following generalization to a tree of Corollary 1.
Lemma 3.
Let , and let be associated with (33)–(38), defined by (7) and (8). The response function for has the form
Here, , and the sequence is positive and strictly increasing. If T is finite then the sums are finite.
Proof.
The proof follows from the proof of Corollary 1, together with the transmission and reflection properties of waves at interior vertices, and reflection properties at boundary vertices. □
Fix . The rest of this section shows how to recover from .
Step 1
For the first step, let be the vertex adjacent to the root , with associated edge labeled . By Proposition 1, we can use to recover , , .
Step 2
Consider . In Step 2, we show how to solve for , see Figure 5.
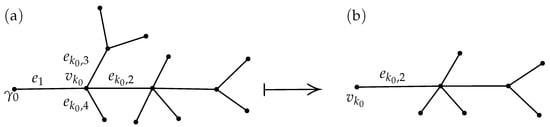
Figure 5.
(a) . (b) Subtree , with .
Since is the root of , the following equation is essentially a restatement of Lemma 1 to trees; the details of its proof are left to the reader.
Here, , and . In what follows in Step 2, for readability, we rewrite as .
Since we know and , we can solve the wave equation on with known boundary data. We identify as the interval with corresponding to . Then , restricted to , solves the following Cauchy problem, where we view x as the “time” variable:
Since the function is known, we can thus uniquely determine and . Thus is determined.
We now show how p and can be used to determine . The following equation follows from the definition of the response operators for any :
In what follows, it is convenient to extend as zero for . By Lemma 1 and by an adaptation of Lemma 2 to general trees, we have the following expansions:
Here, and , and and are positive and increasing. Clearly , can all be determined by and , whereas for now and the sets are unknown. Inserting (39),(41) and (42) into (40), we get
Here all sums have 1 as lower limit of summation.
Lemma 4.
The sets can be determined by and .
Proof.
We mimic an iterative argument in [26]. Differentiating (43) and then matching the delta singularities, we get
Since the sequences are all strictly increasing, clearly we have , so that , and so and . We represent that the set determines the set by
We now match the term with its counterpart on the right hand side of (44). There are three possible cases.
Case 1:.
In this case, we must have
Case 2a: and Note that the last inequality can be verified by an observer at this stage. Then and and hence
Case 2b: and Then . Note we have not yet solved for . In this case, we now repeat the matching coefficient argument just used with .
Again there are three cases:
Case 2bi: . Note all of these terms are known, so this inequality can be verified. In this case, , so and .
Case 2bii: and . Then , and . Thus and .
Case 2biii: and . Then , and we need to continue our procedure with .
Repeating this procedure as necessary, say for a total of times, we solve for . We represent this process as
We must have finite by (44) and the finiteness of the graph.
Iterating this procedure, suppose for we have
Here is chosen to be minimal, and so . We wish to solve for .
We can again distinguish three cases:
Case 1: Note that we know and , so these inequalities are verifiable. In this case, we must have and , so we have determined in this case.
Case 2: There exists an integer Q and pairs , with , such that
Note that all the numbers have been determined, so these equations can be all verified. We can assume all pairs satisfying (45) with are listed. In this case, we have either
Case 2i: It follows then that , and
We thus solve for .
Case 2ii: It follows then that , and we have to repeat this process with .
Repeating the reasoning in Case 2ii as often as necessary, we eventually solve for . Thus,
Hence, we can solve for for any positive integer L given knowledge of for sufficiently large. □
It remains to solve for . In what follows, we set for . We use to denote various functions that we have already established to be determined by and . Having already solved for , we can eliminate from (43) the Heavyside functions to get, recalling ,
We solve this with an iterative argument. Let . For , we have for that so . Hence
Letting , we get
We solve this VESK to determine . Now for , we have for that , and so those terms in (46) with can be absorbed in G to again give
We solve this VESK to determine . Iterating this procedure, we solve for for any finite s.
Step 3 Because are determined by assumption for , the functions are determined. In Step 2, we showed is also determined. Hence by (4), is also determined. We can now carry out the argument in Step 2 on the remaining edges incident on to determine for all j.
Step 4 For each , we use Proposition 1, to find the associated together with the valence of the vertex adjacent to . Careful reading of Steps 2 and 3 shows that we can use and for any .
Step 5 Let be the vertices adjacent to , other than . We now iterate Steps 2–4 for the each of these vertices. Choose for instance . If it were a boundary vertex, this fact would be determined in Step 4, and then this algorithm goes to the next vertex, which we, for convenience, still label . We can thus assume is an interior vertex. Let us label an incident edge (other than ) as , see Figure 6.
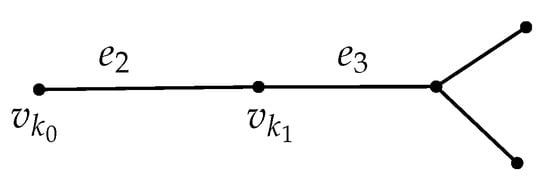
Figure 6.
For Step 5: a subtree of .
We wish to determine . Mimicking Step 2, let solve (1)–(6), let . We have the following formula holding by the definition of response operators:
Of course is assumed to be known. We determine b as follows. We have, from Step 2, that is known. We identify as the interval with corresponding to .
Then arises as a solution to the following Cauchy problem on , where we view x as the “time” variable:
Since and are all known, we can thus determine .
The rest of the argument here is a straightforward adaptation of Steps 2–4 above. The details are left to the reader.
Step 6 Arguing as in Step 5, we determine for all other vertices adjacent to and their associated edges. The details are left to the reader.
Steps above 6 Clearly this procedure can be iterated until all edges of our finite graph have been covered.
5. Conclusions
In this paper, we applied the ideas of the boundary control and leaf peeling methods to solve an inverse problem on a tree featuring non-standard, delta-prime vertex conditions on the interior. Our method required using only one boundary actuator and one boundary sensor, all other observations being internal. Using the Neumann-to-Dirichlet map (acting from one boundary vertex to one boundary and all internal vertices) we recovered the topology and geometry of the graph together with the coefficients of the equations. It would be interesting to see a numerical implementation of our method. It would also be interesting to adapt our methods to quantum graphs with cycles.
Author Contributions
Conceptualization, S.A. and J.E.; methodology, S.A. and J.E.; formal analysis, S.A. and J.E.; writing—original draft preparation, S.A. and J.E.; writing—review and editing, S.A. and J.E. All authors have read and agreed to the published version of the manuscript.
Funding
The research of the first author was supported in part by the National Science Foundation, grant DMS 1909869.
Conflicts of Interest
The authors declare no conflict of interest. The funders had no role in the design of the study; in the collection, analyses, or interpretation of data; in the writing of the manuscript, or in the decision to publish the results.
Abbreviations
The following abbreviations are used in this manuscript:
| VESK | Volterra equation of the second kind |
References
- Lagnese, J.; Leugering, G.; Schmidt, E.J.P.G. Modelling, Analysis, and Control of Dynamical Elastic Multilink Structures; Birkhauser: Basel, Switzerland, 1994. [Google Scholar]
- Gugat, M.; Leugering, G. Global boundary controllability of the Saint-Venant system for sloped canals with friction. Ann. Inst. H. Poincaré Anal. Non Lineaire 2009, 26, 257–270. [Google Scholar] [CrossRef]
- Alì, G.; Bartel, A.; Günther, M. Parabolic Differential-Algebraic Models in Electrical Network Design. Multiscale Model. Simul. 2005, 4, 813–838. [Google Scholar] [CrossRef]
- Bastin, G.; Coron, J.M.; dÁndrèa Novel, B. Using hyperbolic systems of balance laws for modeling, control and stability analysis of physical networks. In Proceedings of The Lecture Notes for the Pre-Congress Workshop on Complex Embedded and Networked Control Systems 17th IFAC World Congress, Seoul, Korea, 16–20 July 2008; Elsevier: Amsterdam, The Netherlands, 2008. [Google Scholar]
- Colombo, R.M.; Guerra, G.; Herty, M.; Schleper, V. Optimal control in networks of pipes and canals. SIAM J. Control Optim. 2009, 48, 2032–2050. [Google Scholar] [CrossRef]
- Hurt, N.E. Mathematical Physics of Quantum Wires and Devices; Kluwer: Dordrecht, The Netherlands, 2000. [Google Scholar]
- Joachim, C.; Roth, S. (Eds.) Atomic and Molecular Wires; NATO Science Series. Series E: Applied Sciences; Kluwer: Dordrecht, The Netherlands, 1997; p. 341. [Google Scholar]
- Kostrykin, V.; Schrader, R. Kirchoff’s rule for quantum wires. J. Phys. A Math. Gen. 1999, 32, 595–630. [Google Scholar] [CrossRef]
- Kostrykin, V.; Schrader, R. Kirchoff’s rule for quantum wires II: The inverse problem with possible applications to quantum computers. Fortschritte Derphysik 2000, 48, 703–716. [Google Scholar] [CrossRef]
- Kottos, T.; Smilansky, U. Quantum chaos on graphs. Phys. Rev. Lett. 1997, 79, 4794–4797. [Google Scholar] [CrossRef]
- Kottos, T.; Smilansky, U. Periodic orbit theory and spectral statistics for quantum graphs. Ann. Phys. 1999, 274, 76–124. [Google Scholar] [CrossRef]
- Melnikov, Y.B.; Pavlov, B.S. Two-body scattering on a graph and application to simple nanoelectronic devices. J. Math. Phys. 1995, 36, 2813–2825. [Google Scholar] [CrossRef]
- Adam, S.; Hwang, E.H.; Galits, V.M.; Das Sarma, S. A self-consistent theory for graphene transport. Proc. Natl. Acad. Sci. USA 2007, 104, 18392–18397. [Google Scholar] [CrossRef]
- Peres, N.M.R. Scattering in one-dimensional heterostructures described by the Dirac equation. J. Phys. Condens. Matter 2009, 21, 095501. [Google Scholar] [CrossRef]
- Peres, N.M.R.; Rodrigues, J.N.B.; Stauber, T.; Lopes dos Santos, J.M.B. Dirac electrons in graphene-based quantum wires and quantum dots. J. Phys. Condens. Matter 2009, 21, 344202. [Google Scholar] [CrossRef] [PubMed]
- Avdonin, S.A.; Bell, J. Determining a distributed conductance parameter for a neuronal cable model defined on a tree graph. Inverse Probl. Imaging 2015, 9, 645–659. [Google Scholar] [CrossRef]
- Bell, J.; Craciun, G. A distributed parameter identification problem in neuronal cable theory models. Math. Biosci. 2005, 194, 1–19. [Google Scholar] [CrossRef] [PubMed]
- Rall, W. Core conductor theory and cable properties of neurons. In Handbook of Physiology, The Nervous System; American Physiological Society: Rockville, MD, USA, 1977; pp. 39–97. [Google Scholar]
- Berkolaiko, G.; Kuchment, P. Introduction to Quantum Graphs, (Mathematical Surveys and Monographs; American Mathematical Society: Providence, RI, USA, 2013; Volume 186. [Google Scholar]
- Exner, P. Vertex couplings in quantum graphs: Approximations by scaled Schrödinger operators. In Mathematics in Science and Technology; World Sci. Publ.: Hackensack, NJ, USA, 2011; pp. 71–92. [Google Scholar]
- Avdonin, S.A.; Kurasov, P. Inverse problems for quantum trees. Inverse Probl. Imaging 2008, 2, 1–21. [Google Scholar] [CrossRef]
- Al-Musallam, F.; Avdonin, S.A.; Avdonina, N.; Edward, J. Control and inverse problems for networks of vibrating strings with attached masses. Nanosyst. Phys. Chem. Math. 2016, 7, 835–841. [Google Scholar] [CrossRef][Green Version]
- Avdonin, S.A.; Avdonina, N.; Edward, J. Boundary inverse problems for networks of vibrating strings with attached masses. In Proceedings of the Dynamic Systems and Applications, Volume 7, Dynamic, Atlanta, GA, USA, 27–30 May 2015; pp. 41–44. [Google Scholar]
- Avdonin, S.A.; Mikhaylov, V.S.; Nurtazina, K.B. On inverse dynamical and spectral problems for the wave and Schrödinger equations on finite trees. The leaf peeling method. J. Math. Sci. 2017, 224, 1–15. [Google Scholar] [CrossRef]
- Avdonin, S.A.; Zhao, Y. Leaf peeling method for the wave equation on metric tree graphs. Inverse Probl. Imaging 2020. [Google Scholar] [CrossRef]
- Avdonin, S.A.; Edward, J. An inverse problem for quantum trees. 2020. submitted. [Google Scholar] [CrossRef]
- Avdonin, S.A.; Zhao, Y. Exact controllability of the 1-d wave equation on finite metric tree graphs. Appl. Math. Optim. 2020. [Google Scholar] [CrossRef]
- Avdonin, S.A. Control problems on quantum graphs. In Analysis on Graphs and Its Applications (Proceedings of Symposia in Pure Mathematics); AMS: Pawtucket, RI, USA, 2008; Volume 77, pp. 507–521. [Google Scholar]
- Avdonin, S.A.; Nicaise, S. Source identification problems for the wave equation on graphs. Inverse Probl. 2015, 31, 095007. [Google Scholar] [CrossRef]
- Belishev, M.I.; Vakulenko, A.F. Inverse problems on graphs: Recovering the tree of strings by the BC-method. J. Inverse Ill-Posed Probl. 2006, 14, 29–46. [Google Scholar] [CrossRef]
- Dager, R.; Zuazua, E. Wave Propagation, Observation and Control in 1-d Flexible Multi-Structures, (Mathematiques and Applications); Springer: Berlin/Heidelberg, Germany, 2006; Volume 50. [Google Scholar]
- Avdonin, S.A.; Kurasov, P.; Nowaczyk, M. Inverse problems for quantum trees II: On the reconstruction of boundary conditions for star graphs. Inverse Probl. Imaging 2010, 4, 579–598. [Google Scholar] [CrossRef]
- Avdonin, S.A.; Edward, J. Controllability for string with attached masses and Riesz bases for asymmetric spaces. Math. Control Relat. Fields 2019, 9, 453–494. [Google Scholar] [CrossRef]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).