Accelerometer Based Method for Tire Load and Slip Angle Estimation


Abstract
:1. Introduction
- (i)
- The APOLLO program—Developed a 3-in-l intelligent tire [15];
- (ii)
- The FRICTI@N program—On-board system for measuring and estimating tire-road friction [16];
- (iii)
- Contact area information sensing (CAIS) system being developed by Bridgestone [17];
- (iv)
- Cyber Tire being developed by Pirelli Tires [18];
- (v)
- Intelligent tire system being developed by Continental AG [19];
- (vi)
- Intelligent tire system being developed by Hyundai Motor Co, Mando Corp, and Corechips [20];
- (vii)
- Goodyear Dunlop’s chip-in-tire [21].
- Literature review of the different signal processing techniques used by researchers to extract meaningful information from tire mounted sensors, specifically from tire mounted accelerometers.
- Details about research activities undertaken as part of this study to develop a smart tire.
- Novel algorithms for estimating the tire load and slip angle.
2. Literature Review
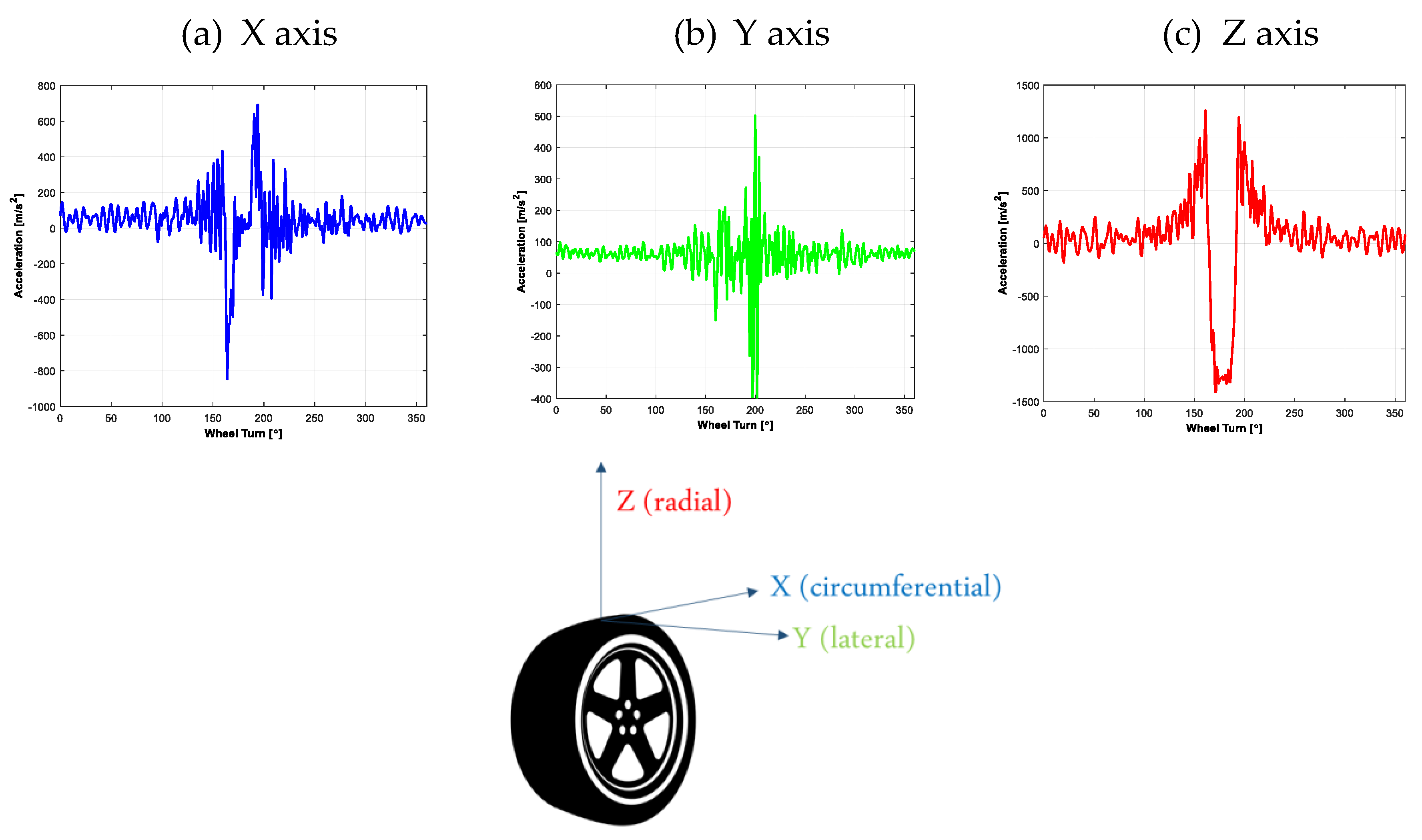
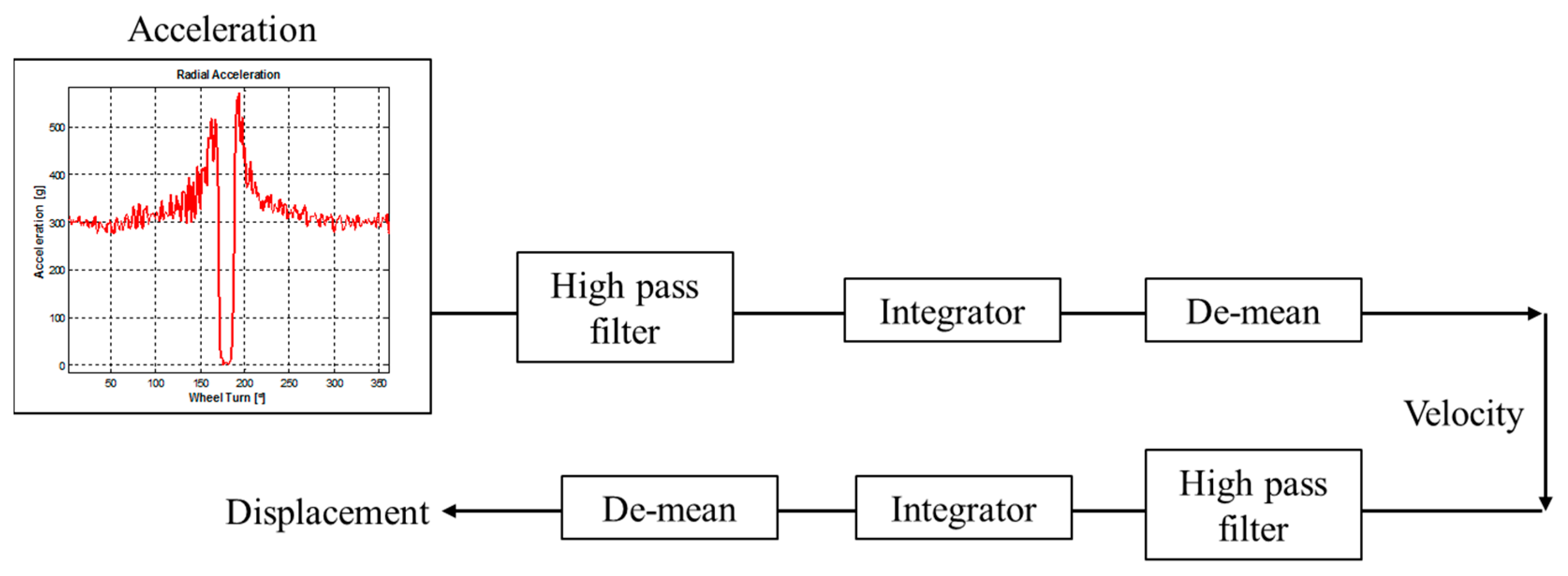
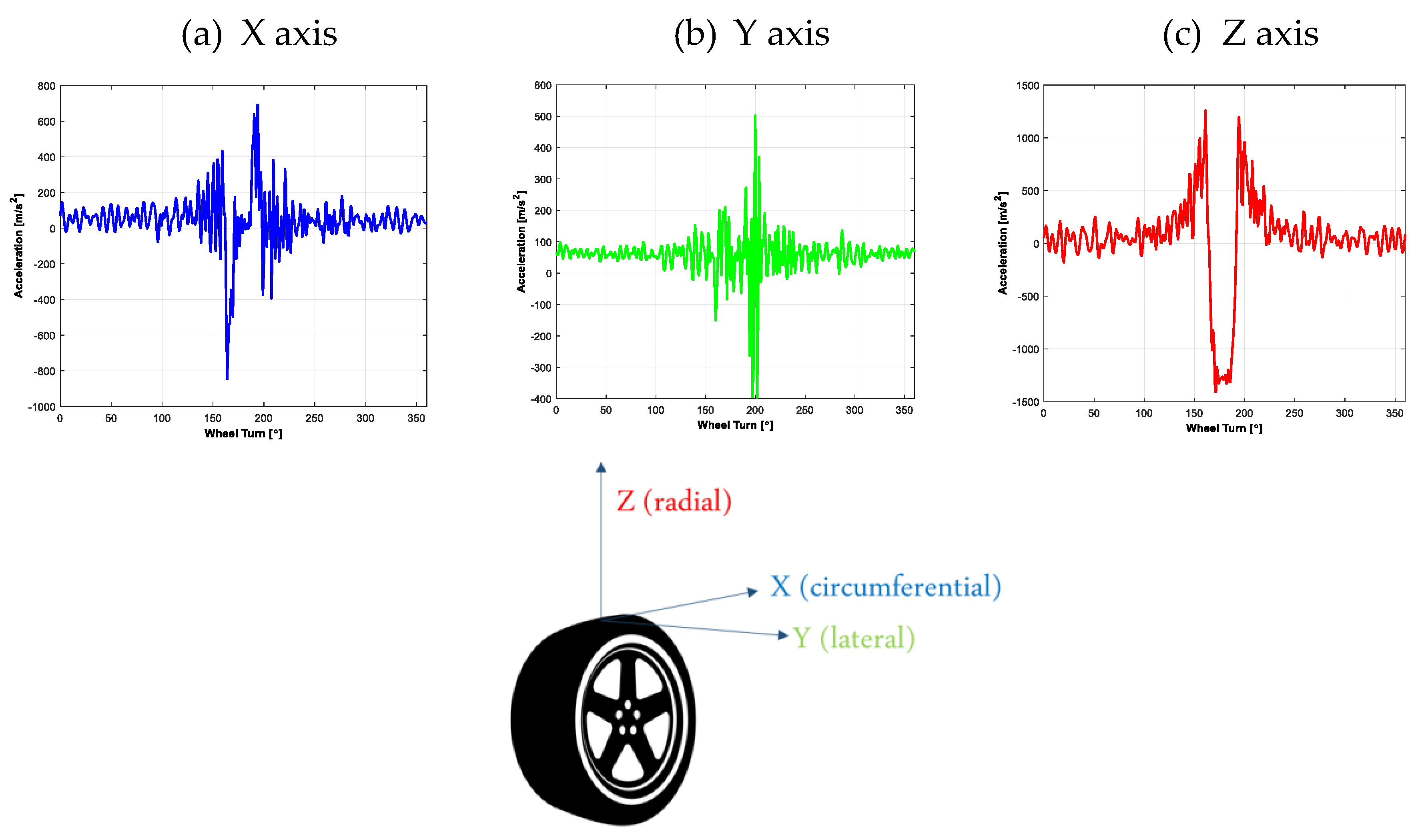
- Among the three axes, the radial acceleration signal has been exploited the most by researchers.
- Most of these applications require data to be sampled at high rates. For instance, for tire-road friction sensing, the sensor signal needs to be sampled at 5–10 kHz.
- Both time and frequency domain signal processing techniques have been extensively used.
- Current tire pressure monitoring (TPMS) chips available in production vehicles cannot support such complex signal processing algorithms. Hence, an application specific IC would to be required.
- Since these sensor systems are expected to survive the tire service life, they would require a power source capable of supporting the high sampling rate data processing and high frequency data transmission.
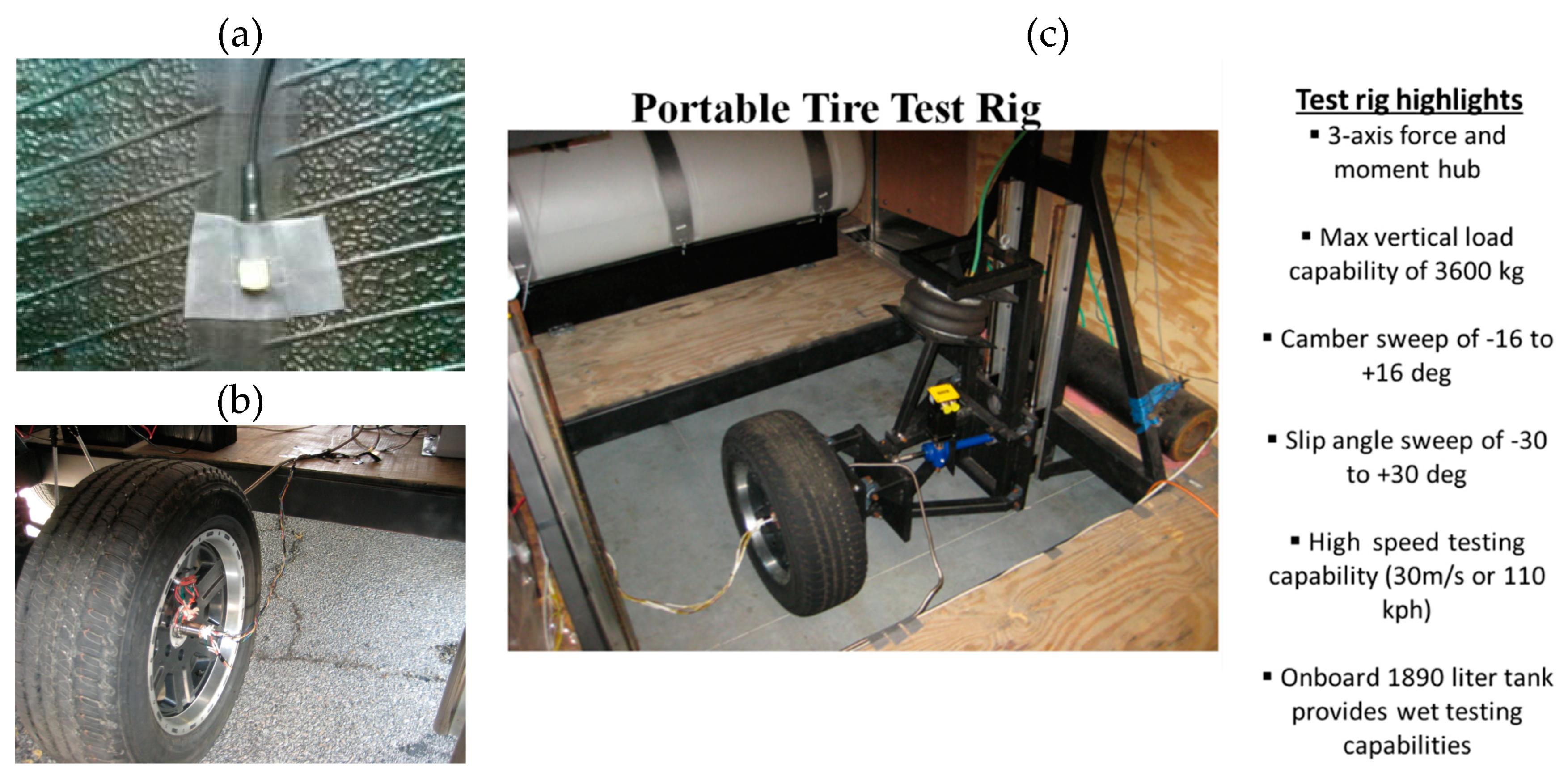
3. Development of a Smart Tire System
- First, with information about individual tire loads from the tire mounted sensors, the vehicle inertial parameters, namely, vehicle mass, yaw moment of inertia and axle distances from the vehicle center of gravity, can be precisely estimated, thus making the vehicle controller robust against variations in vehicle model parameters.
- Second, it is well known in literature that the vehicle sideslip angle can significantly reduce the risk of accidents through the effective design and implementation of advanced chassis control systems. However, in production vehicles, the sideslip angle is difficult to measure within the desired accuracy level because of high costs and other associated impracticalities. Having a direct measurement of the tire slip angle from a smart tire would enable the design of novel control systems using the tire slip angle as a feedback signal instead of the vehicle sideslip angle.
4. Algorithm Details
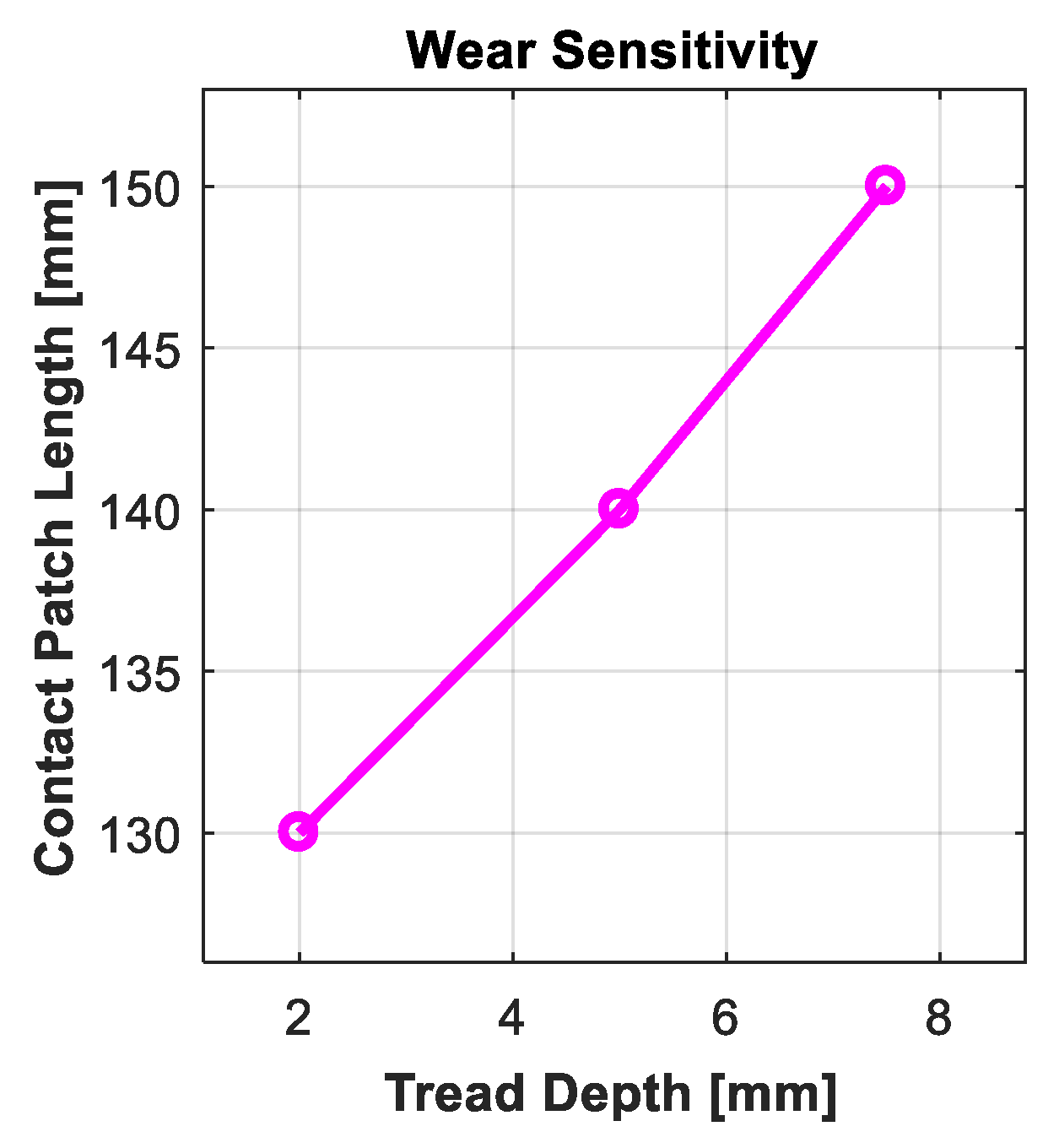
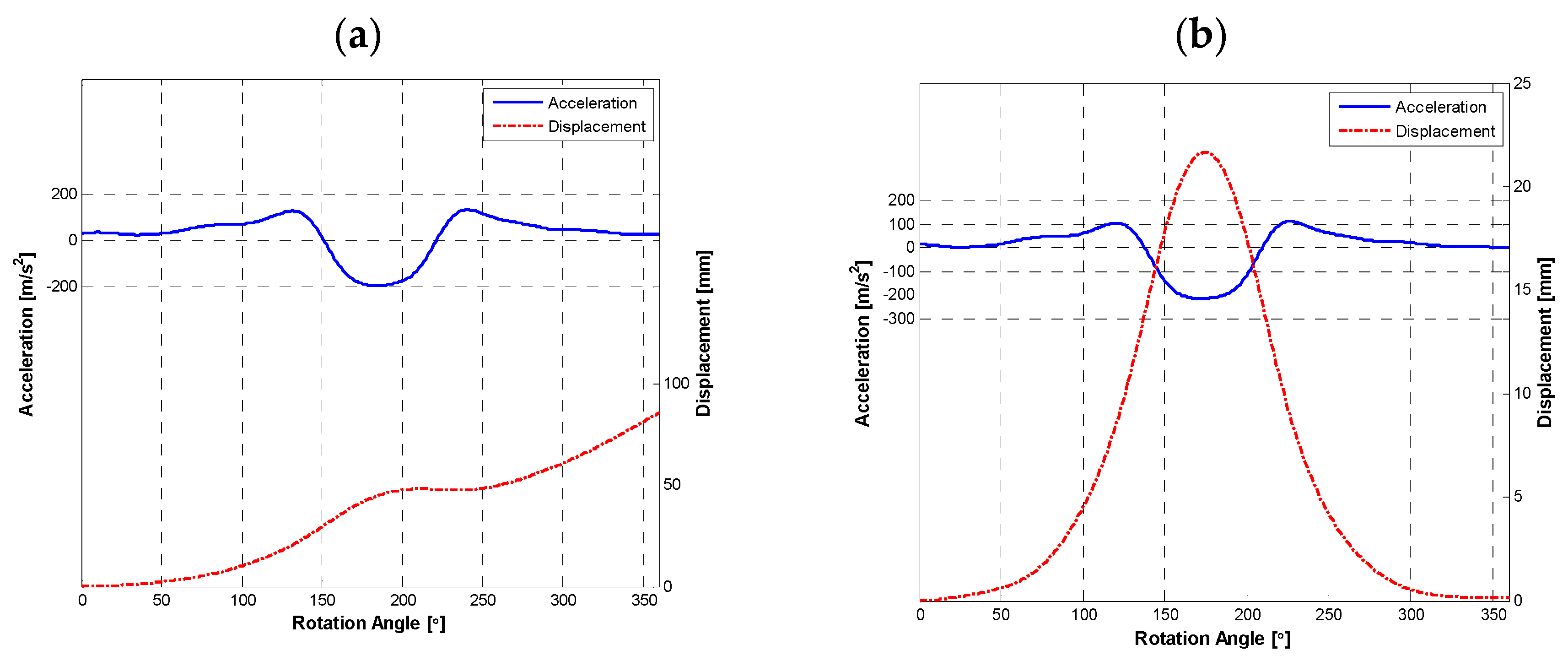
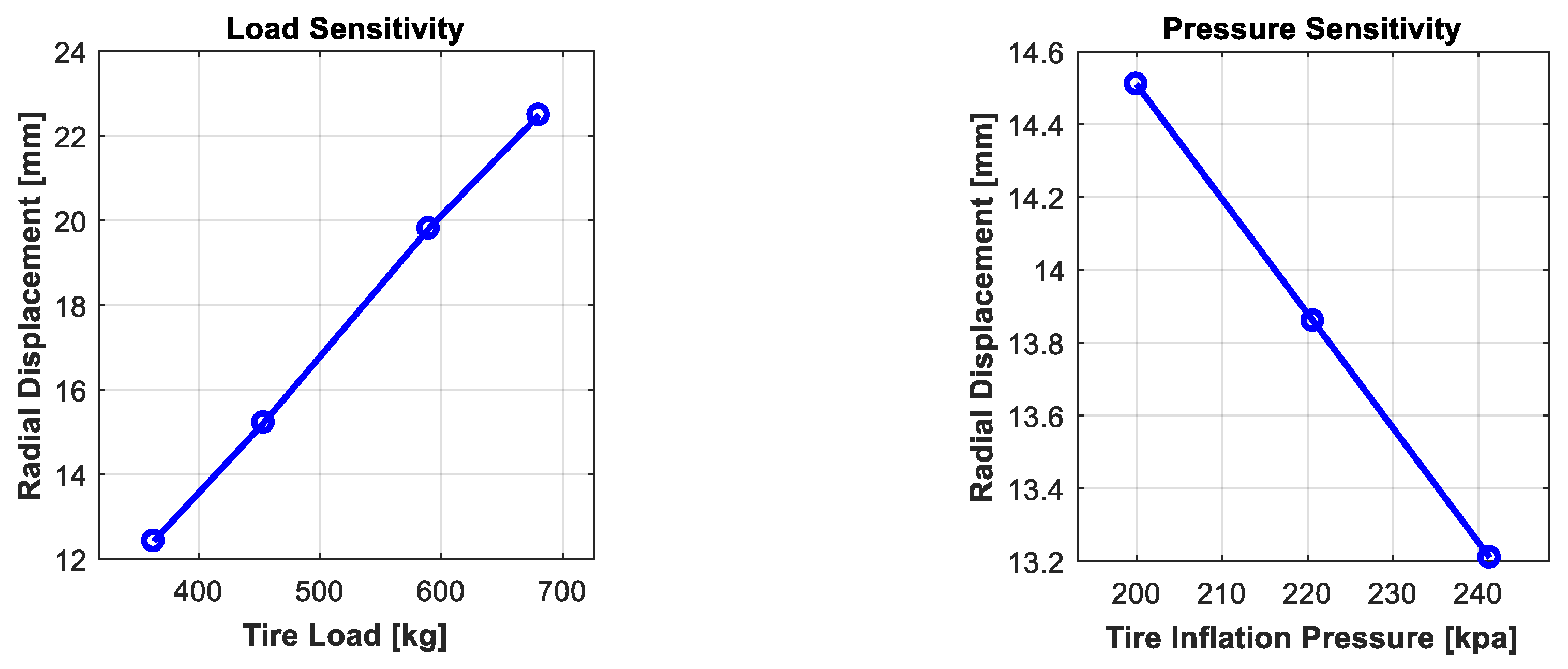
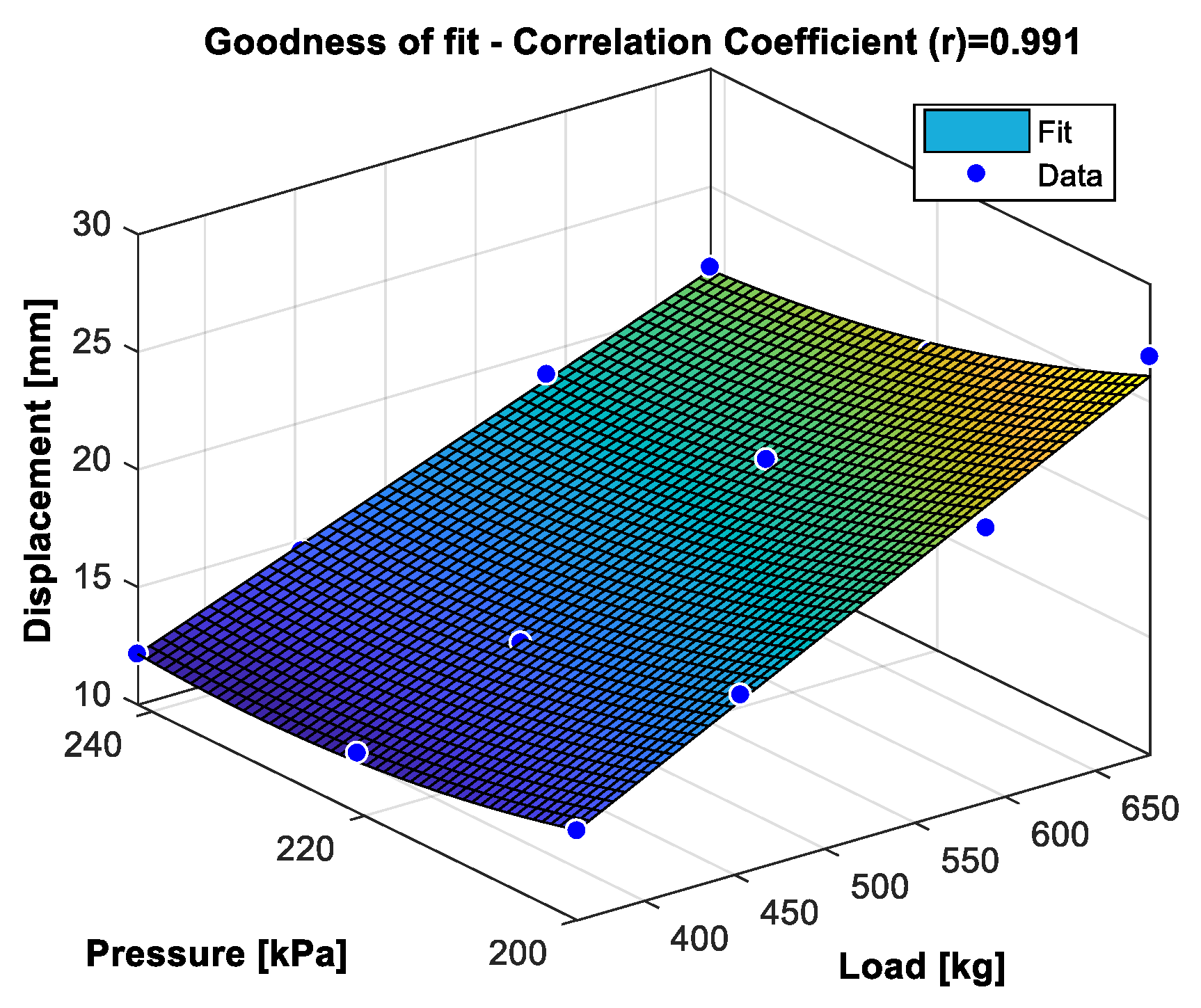
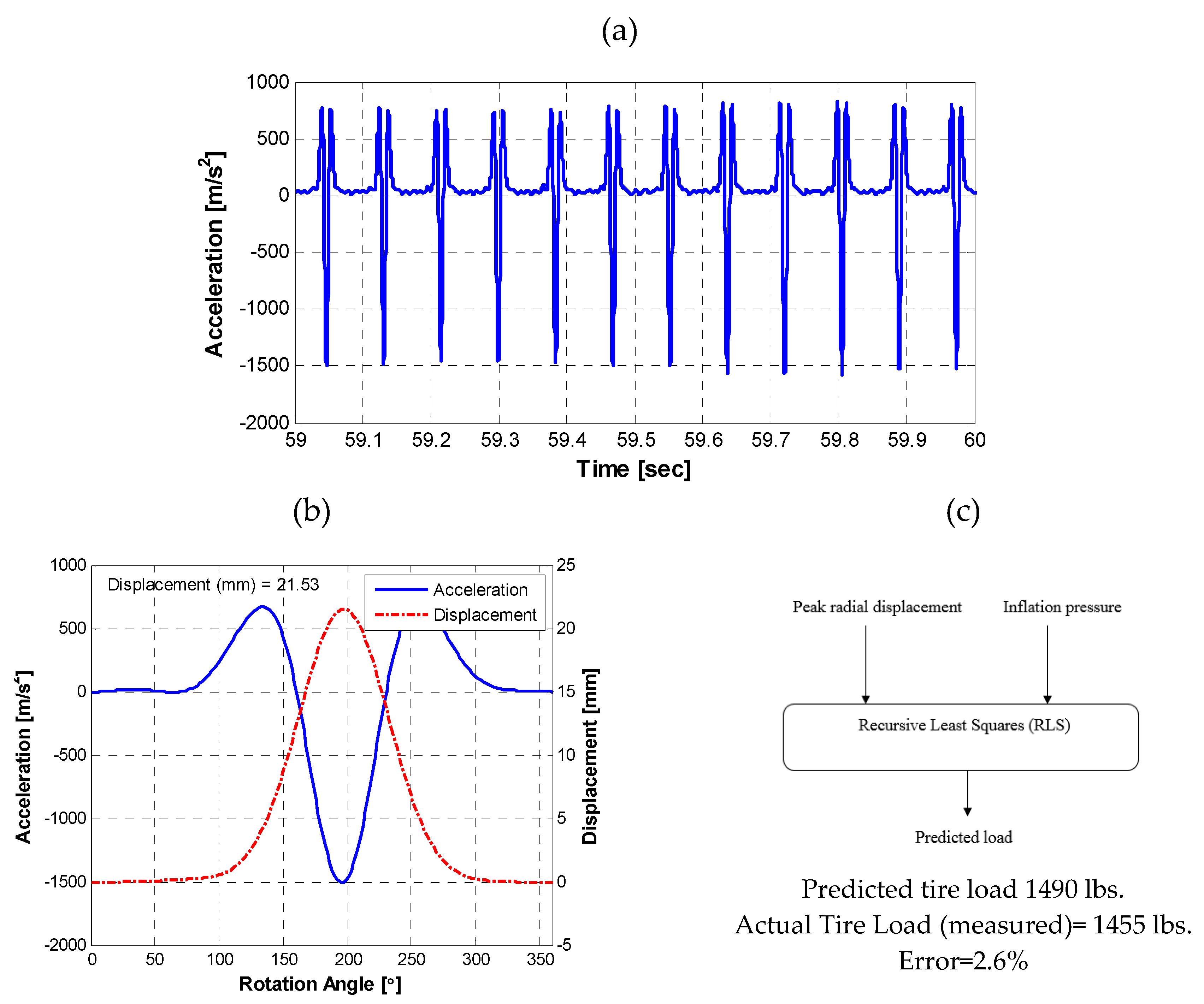
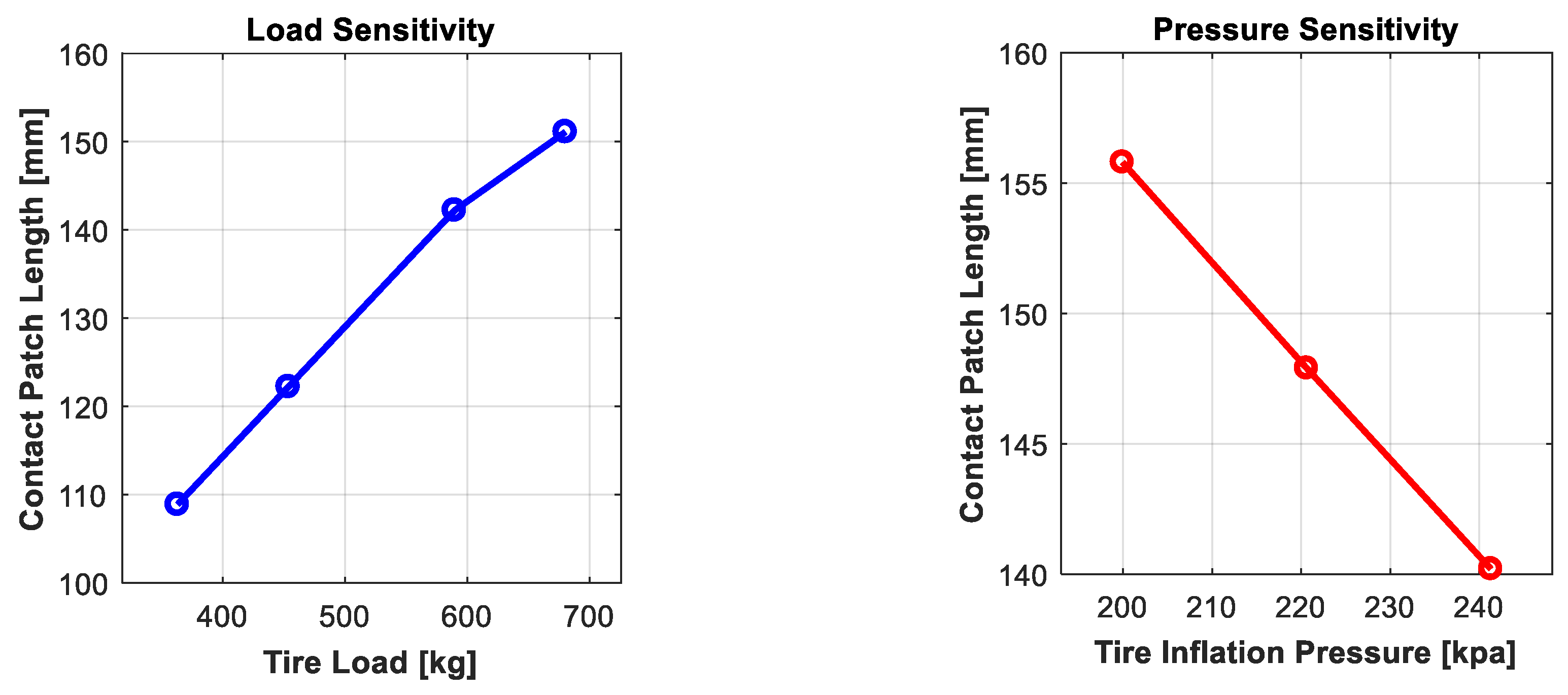
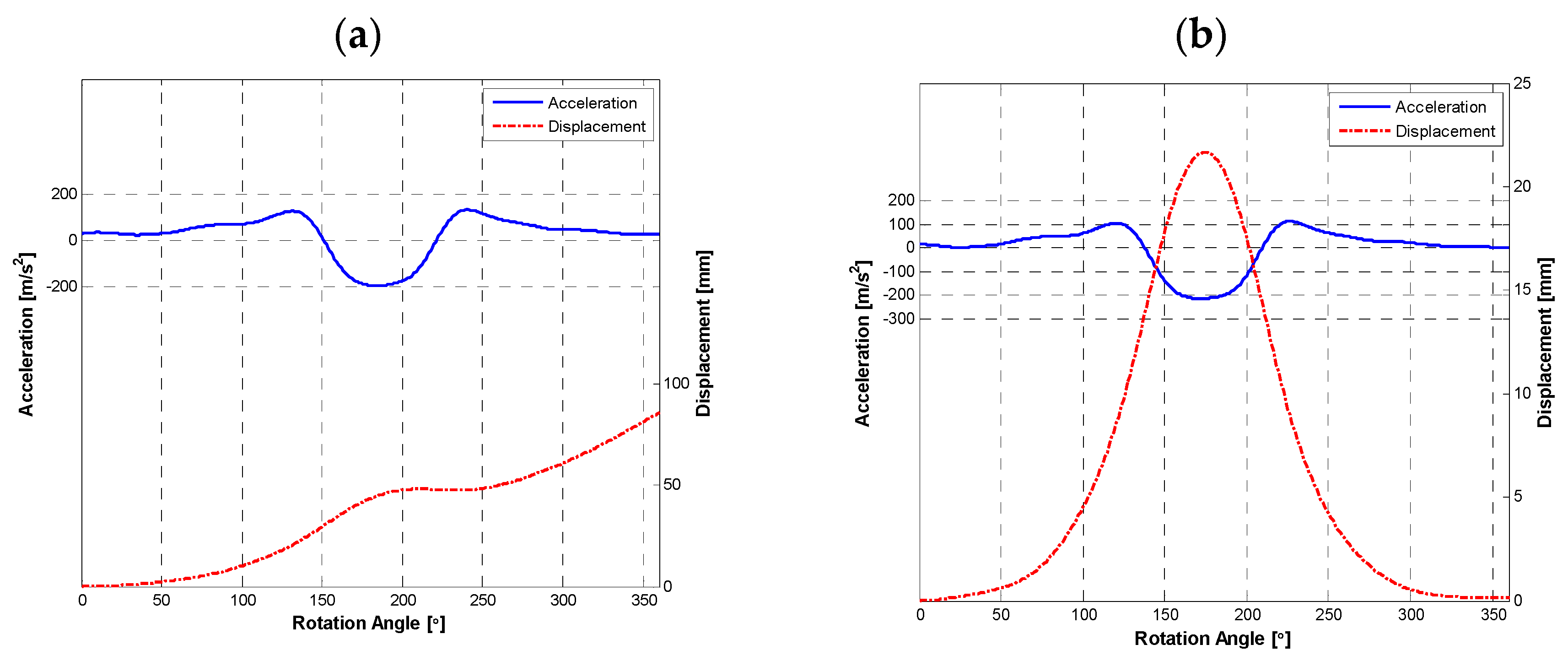
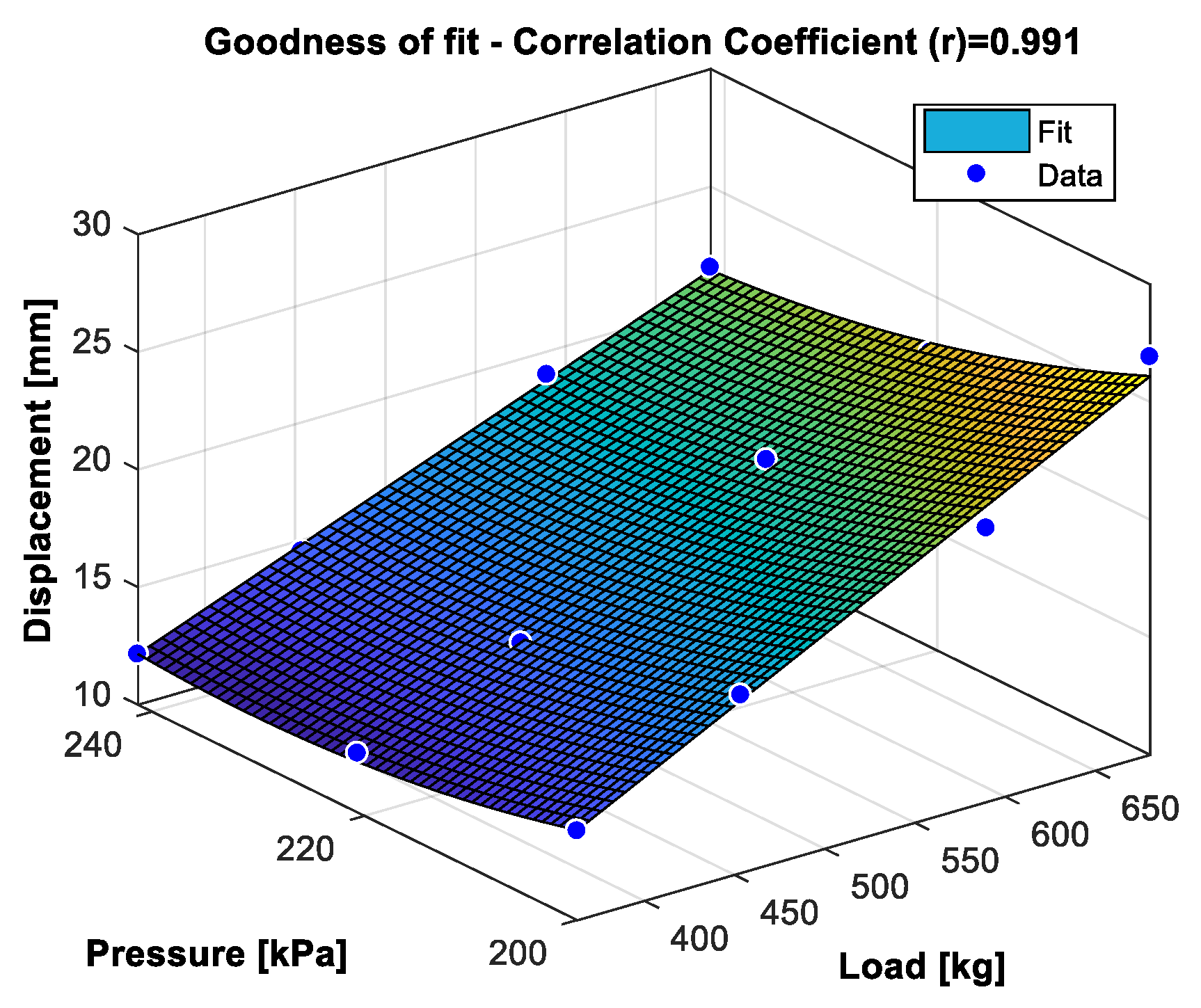
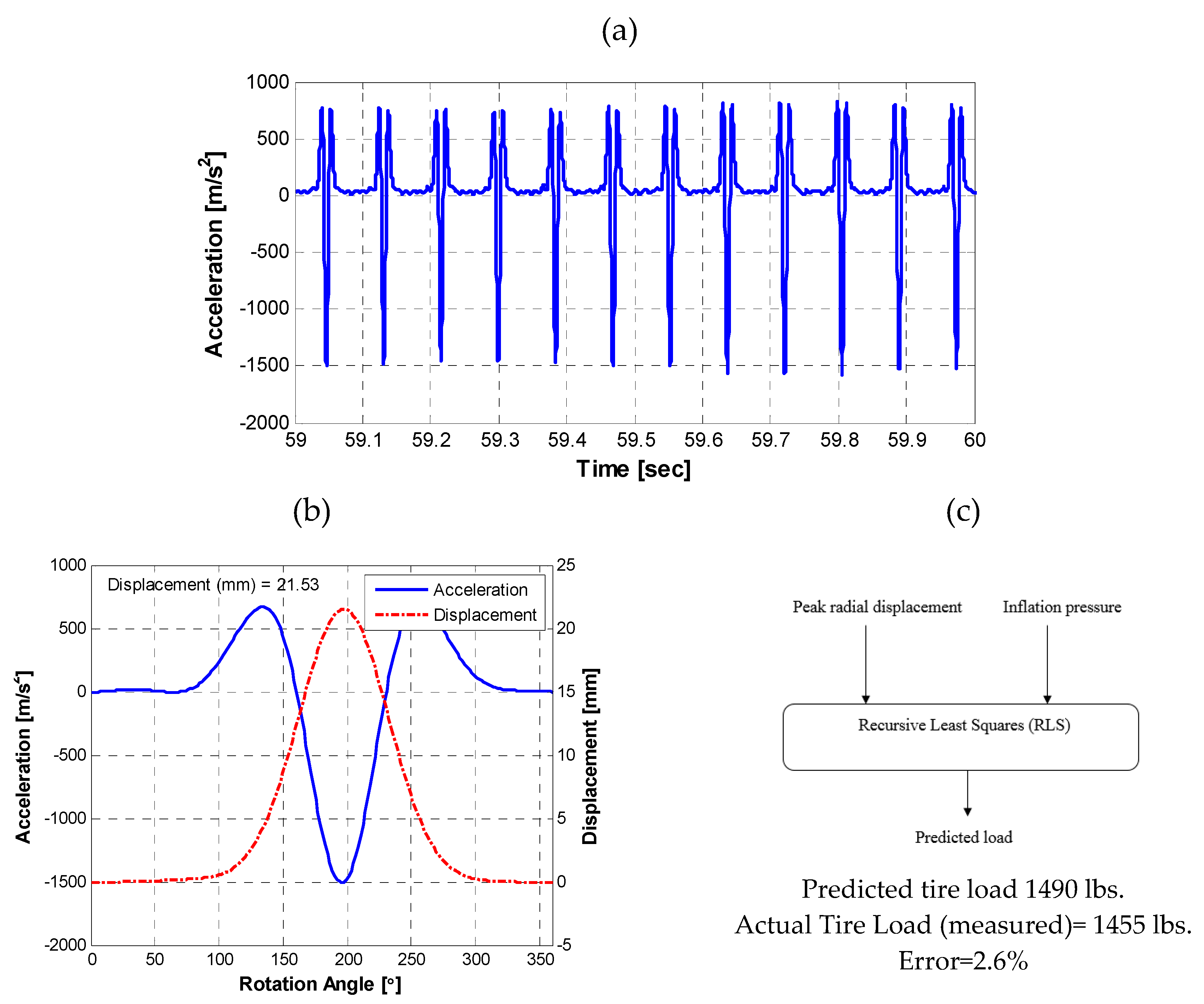
4.1. Tire Load Estimation
- Higher load results in a longer contact patch length
- Higher inflation pressure results in shorter contact patch length
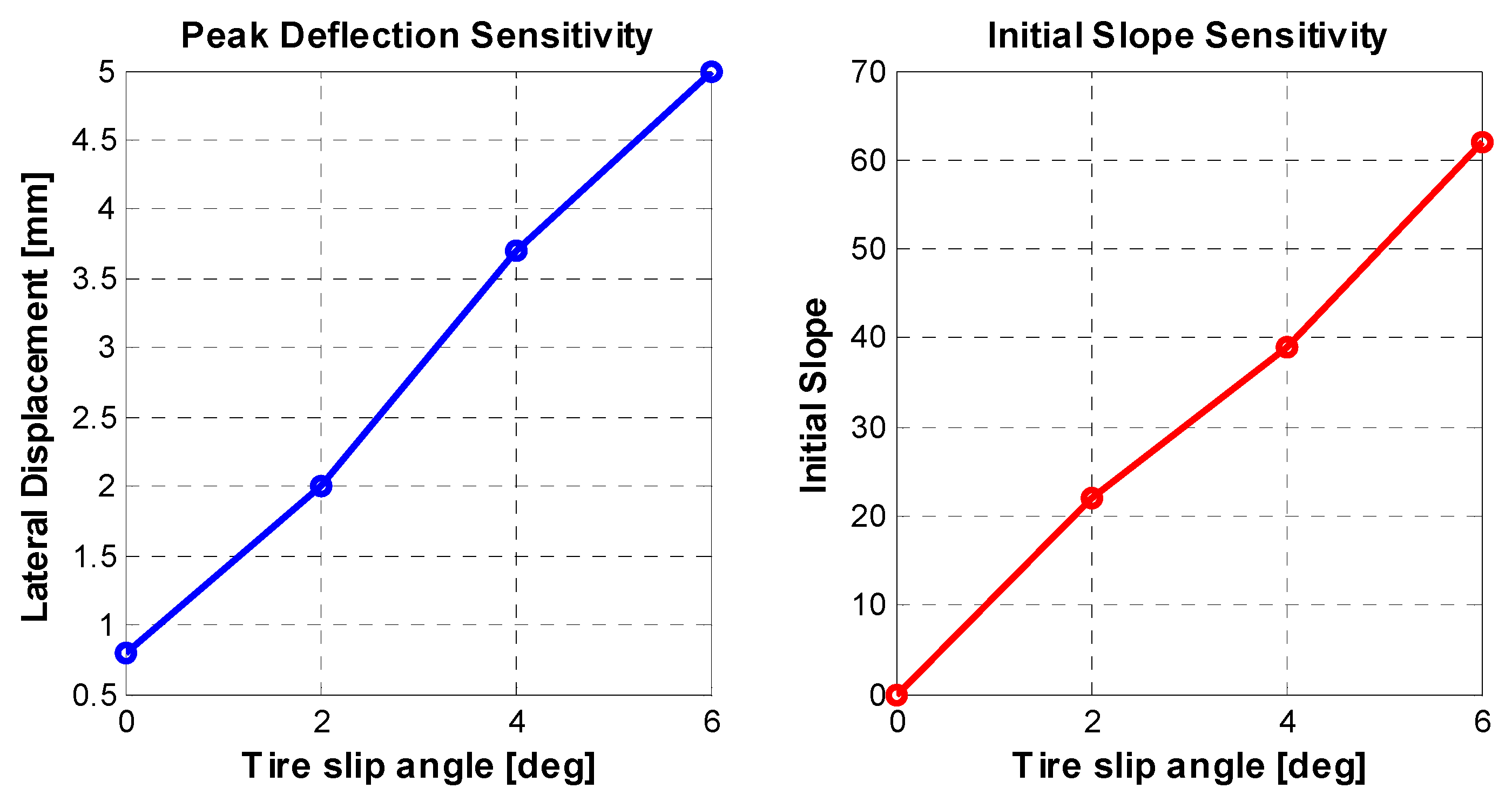
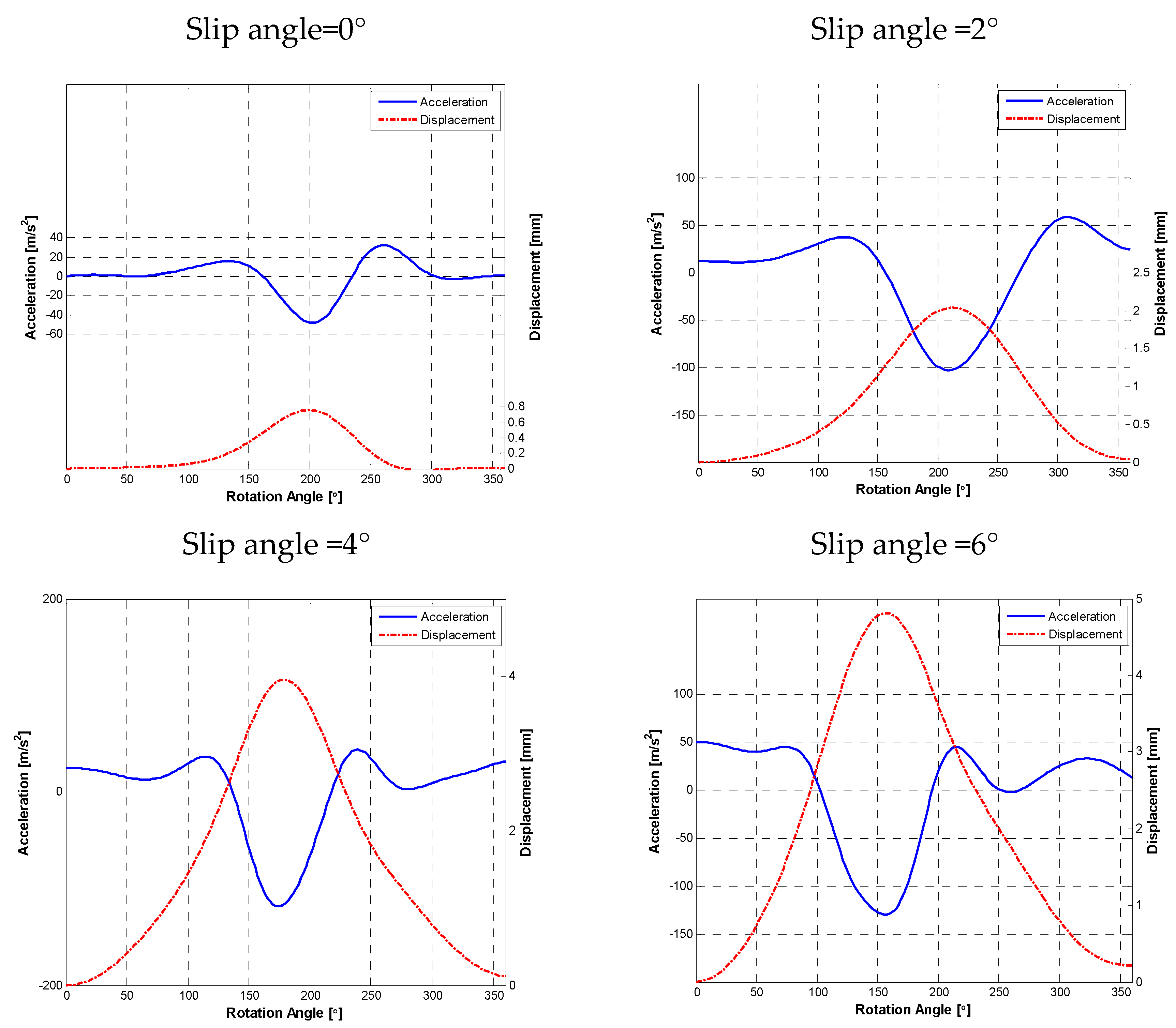
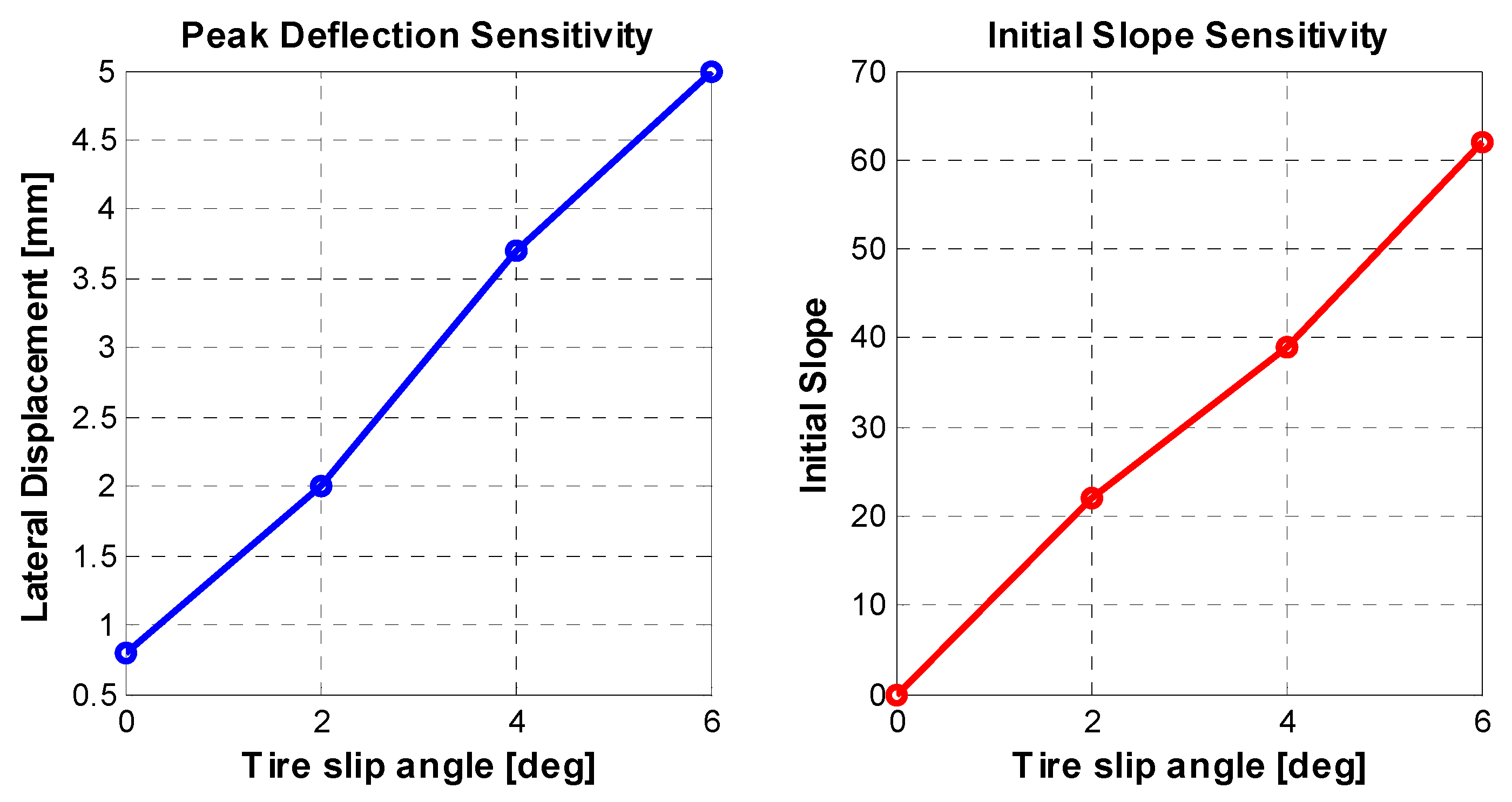
4.2. Tire Slip Angle Estimation
- The maximum lateral displacement of the tire footprint increases as the slip angle increases.
- The slope of the initial linear part of the lateral displacement profile also increases as the slip angle increases.
5. Conclusions
- For the installation of sensors in a tire, many problems will need to be considered, such as the compatibility of the sensors with the tire rubber i.e., stiffness issues, robustness of sensor in the harsh tire environment, wireless transmission of gathered data in an energy efficient manner, economic issues relating to the use of expensive sensors in a comparatively inexpensive product, the tire and finally meeting the power requirements of all the electronic components.
- Most studies have assessed the benefits of a smart tire for control systems in a simulation environment. It remains to be foreseen how much of this benefit can be captured in the real-world, considering that most smart tires use a single point sensing solution transmitting data at a low frequency.
- It is also concluded that the current tire pressure monitoring chips available in the production vehicles cannot support complex signal processing algorithms required to extract signal features from tire mounted sensors. Hence, an application specific integrated chip (ASIC) would be required.
Author Contributions
Funding
Conflicts of Interest
References
- Sabbioni, E.; Kakalis, L.; Cheli, F. On the impact of the maximum available tire-road friction coefficient awareness in a brake-based torque vectoring system. SAE Tech. Pap. 2010. [Google Scholar] [CrossRef]
- Braghin, F.; Cheli, F.; Melzi, S.; Sabbioni, E.; Mancosu, F.; Brusarosco, M. Development of a cyber tire to enhance performances of active control systems. In Proceedings of the 7th EUROMECH Solid Mechanics Conference (ESMC 2009), Lisbon, Portugal, 7–11 September 2009; pp. 1–9. [Google Scholar]
- Cheli, F.; Leo, E.; Melzi, S.; Sabbioni, E. On the impact of ‘smart tyres’ on existing ABS/EBD control systems. Veh. Syst. Dyn. 2010, 48, 255–270. [Google Scholar] [CrossRef]
- Erdogan, G.; Hong, S.; Borrelli, F.; Hedrick, K. Tire Sensors for the Measurement of Slip Angle and Friction Coefficient and Their Use in Stability Control Systems. SAE Int. J. Passeng. Cars Mech. Syst. 2011, 4, 44–58. [Google Scholar] [CrossRef]
- Cheli, F.; Sabbioni, E.; Sbrosi, M.; Brusarosco, M.; Melzi, S.; D’alessandro, V. Enhancement of ABS Performance through On-Board Estimation of the Tires’ Response by Means of Smart Tires; SAE Technical Paper; SAE International: Warrendale, PA, USA, 2011. [Google Scholar]
- Cheli, F. Cyber Tyre: A Novel Sensor to Improve Vehicle’s Safety; SAE Technical Paper; SAE International: Warrendale, PA, USA, 2011. [Google Scholar]
- National Highway Traffic Safety Administration. Proposed New Pneumatic Tires for Light Vehicles. FMVSS No. 139. Available online: https://www.nhtsa.gov/sites/nhtsa.dot.gov/files/tp-139-02.pdf (accessed on 25 April 2019).
- 106th Congress. Transportation Recall Enhancement Accountability, and Documentation (TREAD) Act. Available online: https://www.congress.gov/106/plaws/publ414/PLAW-106publ414.pdf (accessed on 25 April 2019).
- National Highway Traffic Safety Administration. Federal Motor Vehicle Safety Standards; Tire Pressure Monitoring Systems; Controls and Displays; National Highway Traffic Safety Administration: Washington, DC, USA, 2000.
- 70 FR 18135—Federal Motor Vehicle Safety Standards; Tire Pressure Monitoring Systems; Controls and Displays—Content Details—05-6741. Available online: https://www.govinfo.gov/app/details/FR-2005-04-08/05-6741 (accessed on 19 April 2019).
- Singh, K.B.; Arat, M.A.; Taheri, S. Enhancement of collision mitigation braking system performance through real-time estimation of tire-road friction coefficient by means of smart tires. SAE Int. J. Passeng. Cars Electron. Electr. Syst. 2012, 5, 607–624. [Google Scholar] [CrossRef]
- Arat, M.A.; Singh, K.B.; Taheri, S. An intelligent tyre based adaptive vehicle stability controller. Int. J. Veh. Des. 2014, 65, 118–143. [Google Scholar] [CrossRef]
- Singh, K.B.; Arat, M.A.; Taheri, S. An intelligent tire based tire-road friction estimation technique and adaptive wheel slip controller for antilock brake system. J. Dyn. Syst. Meas. Control 2013, 135, 031002. [Google Scholar] [CrossRef]
- Arat, M.A. Development and Improvement of Active Vehicle Safety Systems by means of Smart Tire Technology; Virginia Polytechnic Institute and State University: Blacksburg, VA, USA, 2013. [Google Scholar]
- Apollo Main Page. Available online: http://virtual.vtt.fi/virtual/proj3/apollo/ (accessed on 19 April 2019).
- EU Project Friction. Available online: http://friction.vtt.fi/ (accessed on 19 April 2019).
- Sensing Technologies. Bridgestone. Available online: https://www.bridgestone.com/technology_innovation/cais/ (accessed on 21 April 2019).
- Pirelli, Schrader Team up for Computerized ‘Cyber Tire’. Available online: https://www.motorauthority.com/news/1044745_pirelli-schrader-team-up-for-computerized-cyber-tire (accessed on 19 April 2019).
- Continental’s Intelligent Tire. Available online: https://www.continental-tires.com/transport/products/continental-itire (accessed on 19 April 2019).
- Jo, H.Y.; Yeom, M.; Lee, J.; Park, K.; Oh, J. Development of Intelligent Tire System; SAE Technical Paper; SAE International: Warrendale, PA, USA, 2013. [Google Scholar]
- Goodyear Dunlop’s Chip-In-Tyre Shows Latest in Intelligent Tyre Technology: Tyrepress. Available online: https://www.tyrepress.com/2014/03/goodyear-dunlops-chip-in-tyre-shows-latest-in-intelligent-tyre-technology/ (accessed on 19 April 2019).
- Mancosu, F.; Brusarosco, M.; Arosio, D. Method and System for Determining a Tyre Load during the Running of a Vehicle. U.S. Patent 7404317B2, 29 July 2008. [Google Scholar]
- Schillinger, J.; Von Lutz, R.; Cyllik, A.; Lehmann, J. Sensor Transponder and Procedure for Measuring Tire Contact Lengths and Wheel Load. U.S. Patent 7536903B2, 26 May 2009. [Google Scholar]
- Wagner, M.; Troeger, H. Method for Monitoring the Load of Vehicle Tires. U.S. Patent 8742911B2, 3 June 2014. [Google Scholar]
- Tebano, R.; Audisio, G.; Fioravanti, A.P. Method and System for Estimating the Load Acting on a Tire. U.S. Patent 20130261991A1, 3 October 2013. [Google Scholar]
- Brusarosco, M.; Mancosu, F.; Arosio, D. Method and System for Determining a Tyre Load during the Running of a Motor Vehicle. U.S. Patent 7945361B2, 17 May 2011. [Google Scholar]
- Teerhuis, A.; Schmeitz, A.; van de Molengraft-Luijten, L. Tire state estimation based on measured accelerations at the tire inner liner using an Extended Kalman Filter design. In Proceedings of the 4th International Tyre Colloquium, Guildford, UK, 20–21 April 2015. [Google Scholar]
- Krier, D.; Zanardo, G.S.; del Re, L. A PCA-based Modeling Approach for Estimation of Road-tire Forces by In-tire Accelerometers. IFAC Proc. Vol. 2014, 47, 12029–12034. [Google Scholar] [CrossRef]
- Dharamshi, P.; Haas, T.; Kretschmann, M.; Spotka, J. Method and System for Determining a Wheel Load Acting on a Tire of a Vehicle. U.S. Patent 20170355234A1, 14 December 2017. [Google Scholar]
- Schmeitz, A.J.C.; Teerhuis, A.P. Robustness and Applicability of a Model-Based Tire State Estimator for an Intelligent Tire. Tire Sci. Tech. 2018, 46, 105–126. [Google Scholar] [CrossRef]
- Masago, T. Tire Load Estimation Method and Tire Load Estimation Device. U.S. Patent 20190025113A1, 24 January 2019. [Google Scholar]
- Mancosu, F.; Brusarosco, M.; Arosio, D. Method and System for Determining a Cornering Angle of a Tyre during the Running of a Vehicle. U.S. Patent 7552628B2, 30 June 2009. [Google Scholar]
- Mancosu, F.; Brusarosco, M.; Arosio, D. Method and System for Determining a Cornering Angle of a Tyre during the Running of a Vehicle. U.S. Patent 8024087B2, 20 September 2011. [Google Scholar]
- Matsuzaki, R.; Kamai, K.; Seki, R. Intelligent tires for identifying coefficient of friction of tire/road contact surfaces. Sens. Smart Struct. Technol. Civ. Mech. Aerosp. Syst. 2015, 9435, 94350A. [Google Scholar]
- PCB Model 356A01. Available online: http://www.pcb.com/Products/model/356A01 (accessed on 21 April 2019).
- Singh, K.B. Development of an Intelligent Tire Based Tire-Vehicle State Estimator for Application to Global Chassis Control; Virginia Tech: Blacksburg, VA, USA, 2012. [Google Scholar]
- Vahidi, A.; Stefanopoulou, A.; Peng, H. Recursive least squares with forgetting for online estimation of vehicle mass and road grade: theory and experiments. Veh. Syst. Dyn. 2005, 43, 31–55. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Estimated State | Signal Used | Underlying Physics | Reference |
|---|---|---|---|
| Tire vertical force | Radial acceleration | Use an empirical model between tire contact patch length and tire load | [22,23,24,25] |
| Use an empirical model correlating the radial acceleration amplitude to the tire load | [26] | ||
| Use an empirical model to describe the shape of the radial acceleration signal—Vertical load is treated as an unknown parameter and is estimated used an EKF observer | [27] | ||
| Use Principal Component Analysis, to describe smart tire signal variance by means of a few linear projections. Projections are correlated linearly with the contact forces | [28] | ||
| Use a model between tire contact patch length, tire load and the tire operation conditions (toe) for a respective tire type and/or respective physical properties of the tire | [29] | ||
| Assess the real-time applicability of a tire vertical force estimator on a standard platform used for rapid control prototyping on vehicles | [30] | ||
| Use a model correlating the tire ground contact time to tire load, where the contact time is extracted from the differential acceleration waveform | [31] | ||
| Tire slip angle | Radial acceleration | Monitor change in the footprint length at the centerline and shoulder positions to estimate the tire slip angle | [32] |
| Lateral acceleration | Correlate lateral acceleration amplitude with the tire slip angle | [33] | |
| Extract lateral deformation from the acceleration signal and correlate that with the tire slip angle | [34] |
| Accelerometer Characteristics | |
|---|---|
| Range | ±5000 g |
| Sensitivity | 1 mv/g |
| Frequency response | 1.2–10 kHz |
| Resonance frequency | 30 kHz |
| Mass | 3.0 g |
| Dimensions | 17.7 × 9.02 × 9.14 mm |
| Load (kg) | Pressure (kPa) | Tread Depth (mm) | |
|---|---|---|---|
| Range Tested | 350 kg–680 kg | 200–240 kPa | 2mm–8mm |
| % Change in the Peak Radial Displacement | 80–90% | 10–15% | negligible |
| % Change in the Contact Patch Length | 40–50% | 10–15% | 15–20% |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Singh, K.B.; Taheri, S. Accelerometer Based Method for Tire Load and Slip Angle Estimation. Vibration 2019, 2, 174-186. https://doi.org/10.3390/vibration2020011
Singh KB, Taheri S. Accelerometer Based Method for Tire Load and Slip Angle Estimation. Vibration. 2019; 2(2):174-186. https://doi.org/10.3390/vibration2020011
Chicago/Turabian StyleSingh, Kanwar Bharat, and Saied Taheri. 2019. "Accelerometer Based Method for Tire Load and Slip Angle Estimation" Vibration 2, no. 2: 174-186. https://doi.org/10.3390/vibration2020011
APA StyleSingh, K. B., & Taheri, S. (2019). Accelerometer Based Method for Tire Load and Slip Angle Estimation. Vibration, 2(2), 174-186. https://doi.org/10.3390/vibration2020011