2.2. Frequency Ratio Analysis
The ratio between the fundamental torsional frequency and the fundamental transverse frequency,
, can be expressed as follows [
11]:
where
is the fundamental torsional frequency (Hz) and
is the 1st fundamental transverse frequency (Hz). Using the roots of the Timoshenko frequency equation, Equation (3), and the solution for the torsional mode, the frequency ratio,
, is expressed as Equation (7):
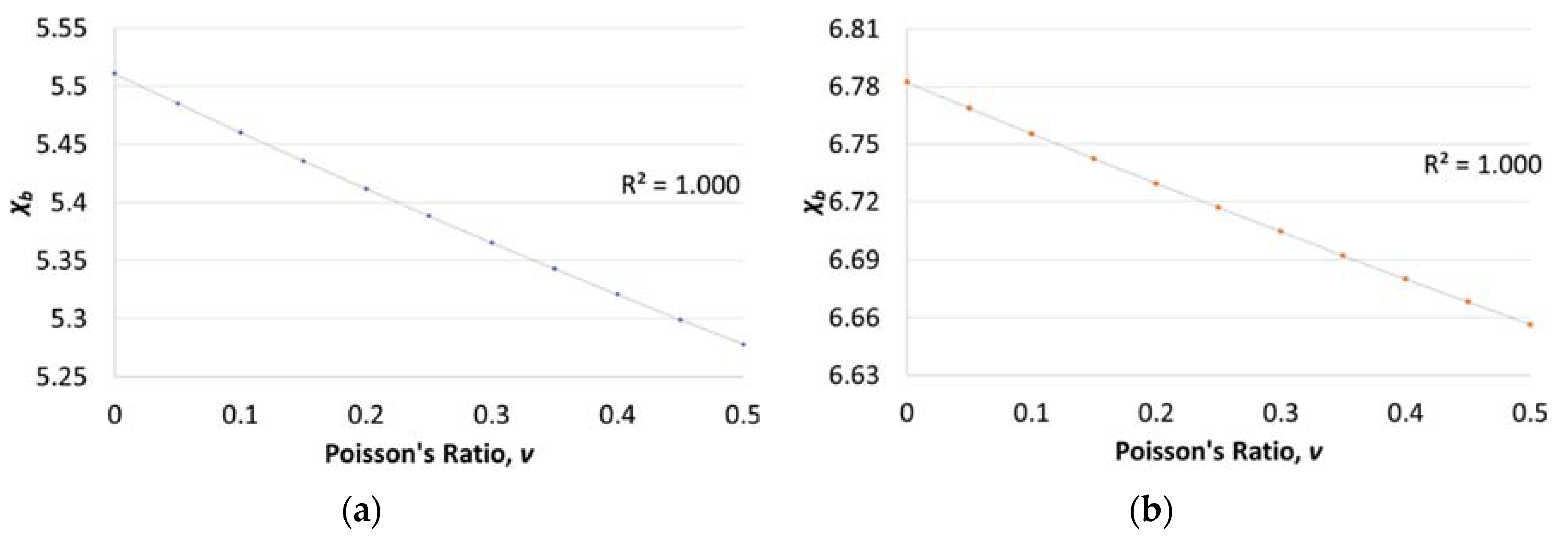
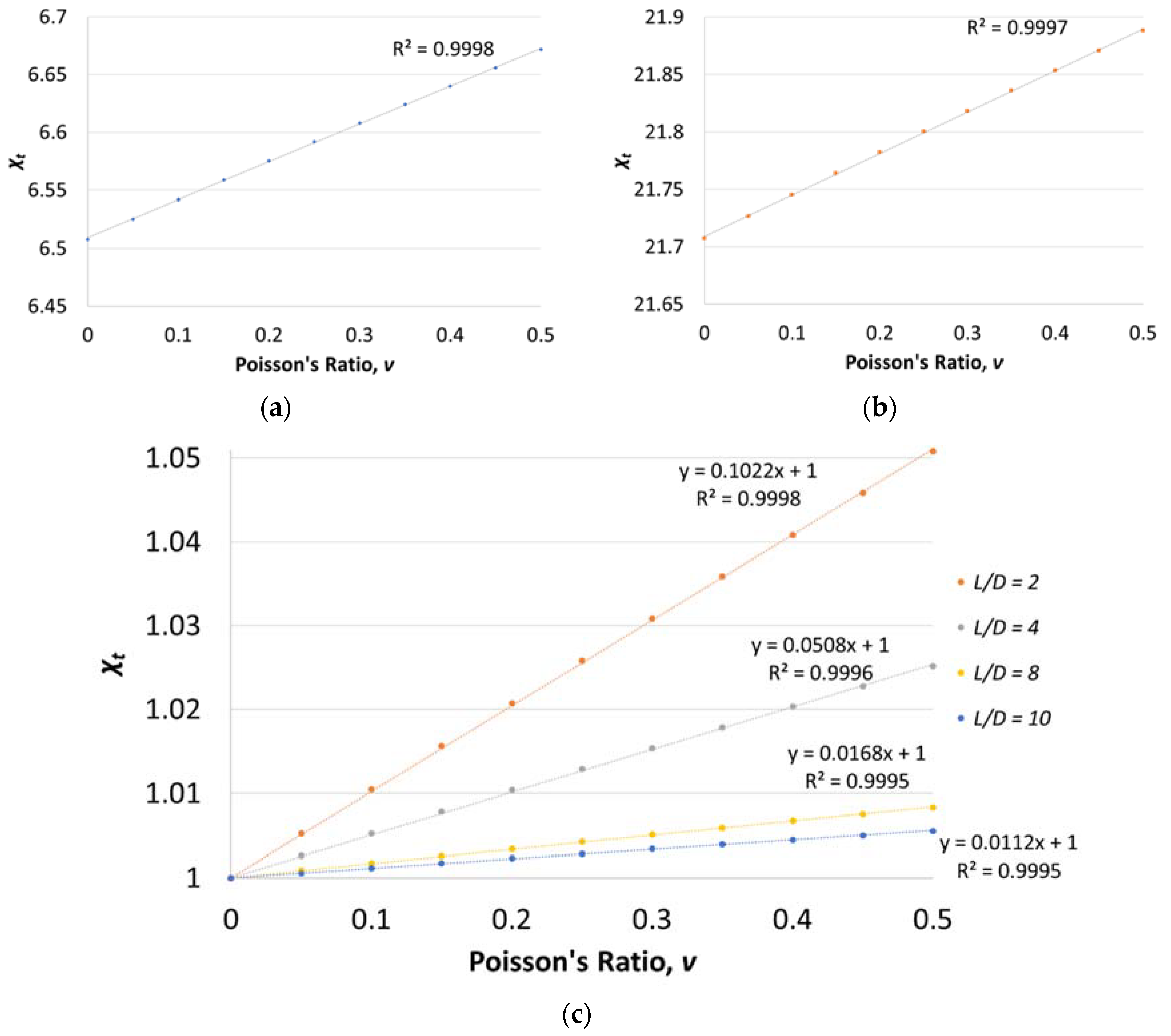
Equation (7) was evaluated for a variety of Poisson’s ratios and rod dimensions as shown in
Figure 2. From
Figure 2, a linear relationship between the Poisson’s ratio,
, and the ratio
can be observed. A clear linear trend can be seen after normalizing the frequency ratio,
, with
at
v = 0 as shown in
Figure 2c. It was found that the slope of the line and the y-intercept are independent of the elastic modulus and the mass density. The frequency ratio,
, only depends on the diameter and the length of the rod as shown in Equation (7). Hence, the ratio
can be expressed as Equation (8):
The Poisson’s ratio can then be calculated using the equation below:
Furthermore, after knowing Poisson’s ratio, the elastic modulus can be determined using the experimental torsional frequency with Equation (10):
The values of
and
for different specimen dimensions were found by calculating
for different length/diameter ratios as well as varying Poisson’s ratio (shown in
Appendix A). The constant
was found by calculating
when Poisson’s ratio was equal to zero. The calculated values for
are shown in
Table 3. A similar procedure was carried out to determine
. After plotting
, the slope of the best-fit line was used to find
.
Table 3 shows the calculated value of
for different length/diameter (
L/D) ratios.
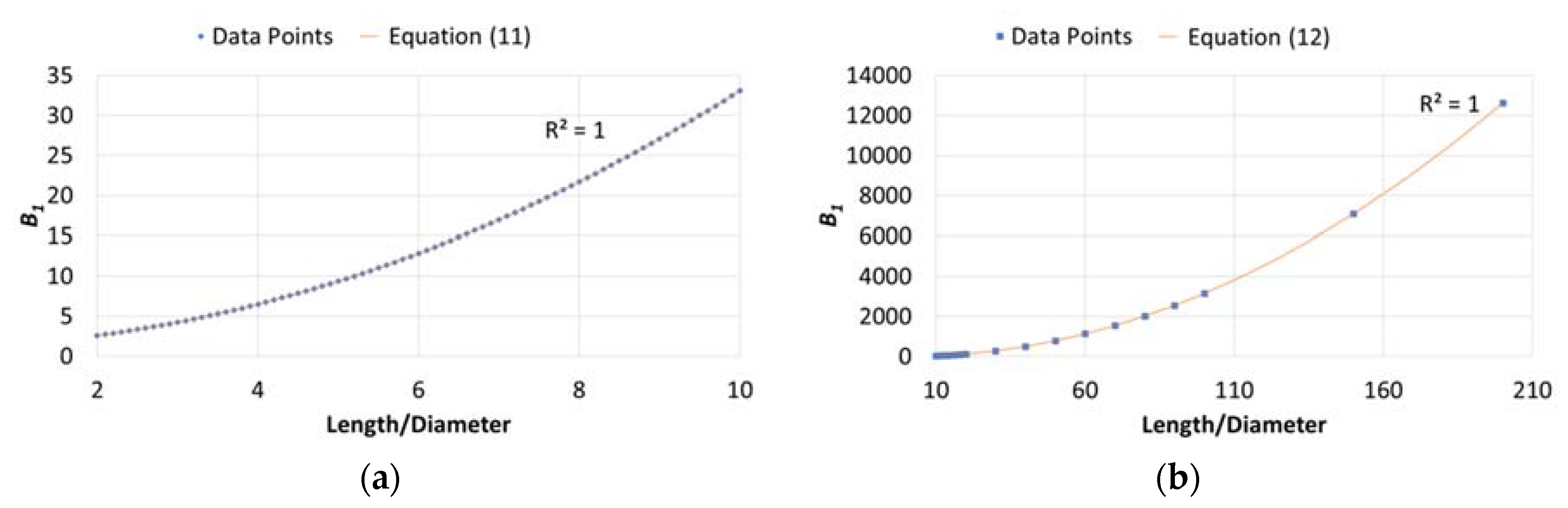
As shown in
Figure 3 and
Figure 4, polynomials can be used to express the values of
. Although only nine
L/D points are shown in
Table 3, a total of 97
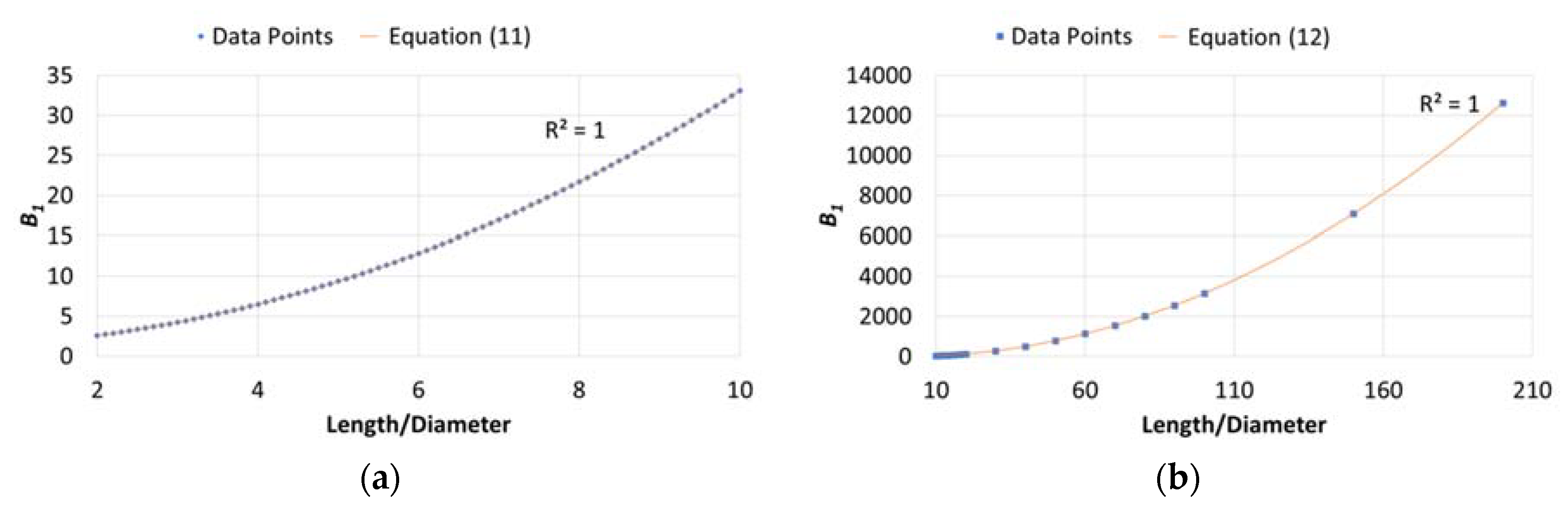
L/D data points were used to find the best-fit polynomials. Due to the wide range of
, shown in
Figure 3, a single polynomial will have a 3% difference between the estimated values and the theoretical values found using Equation (8) when
. Therefore, to reduce the difference to less than 0.06%, two polynomials (sixth-order) are needed to express
for two separate intervals, Equations (11) and (12).
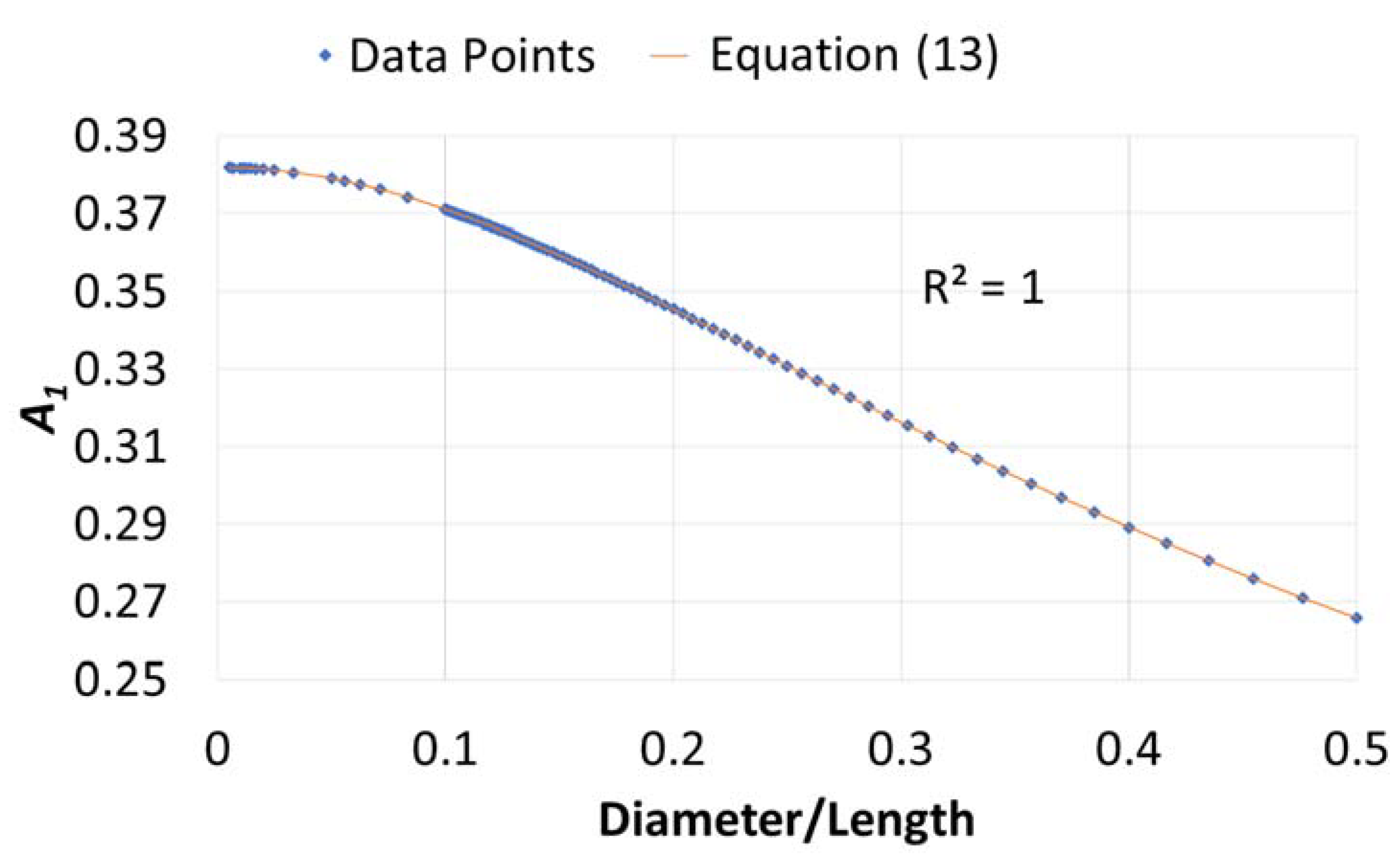
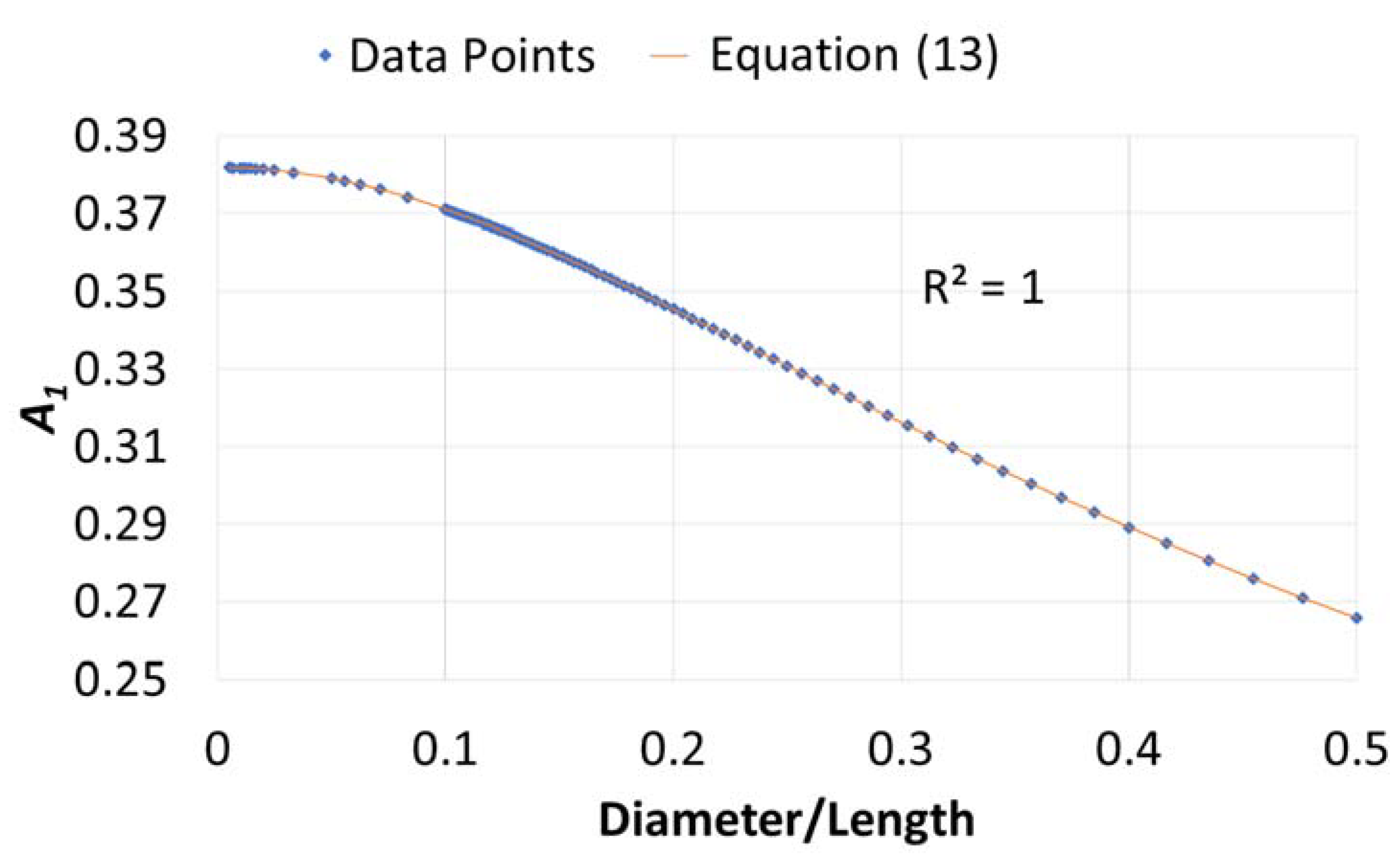
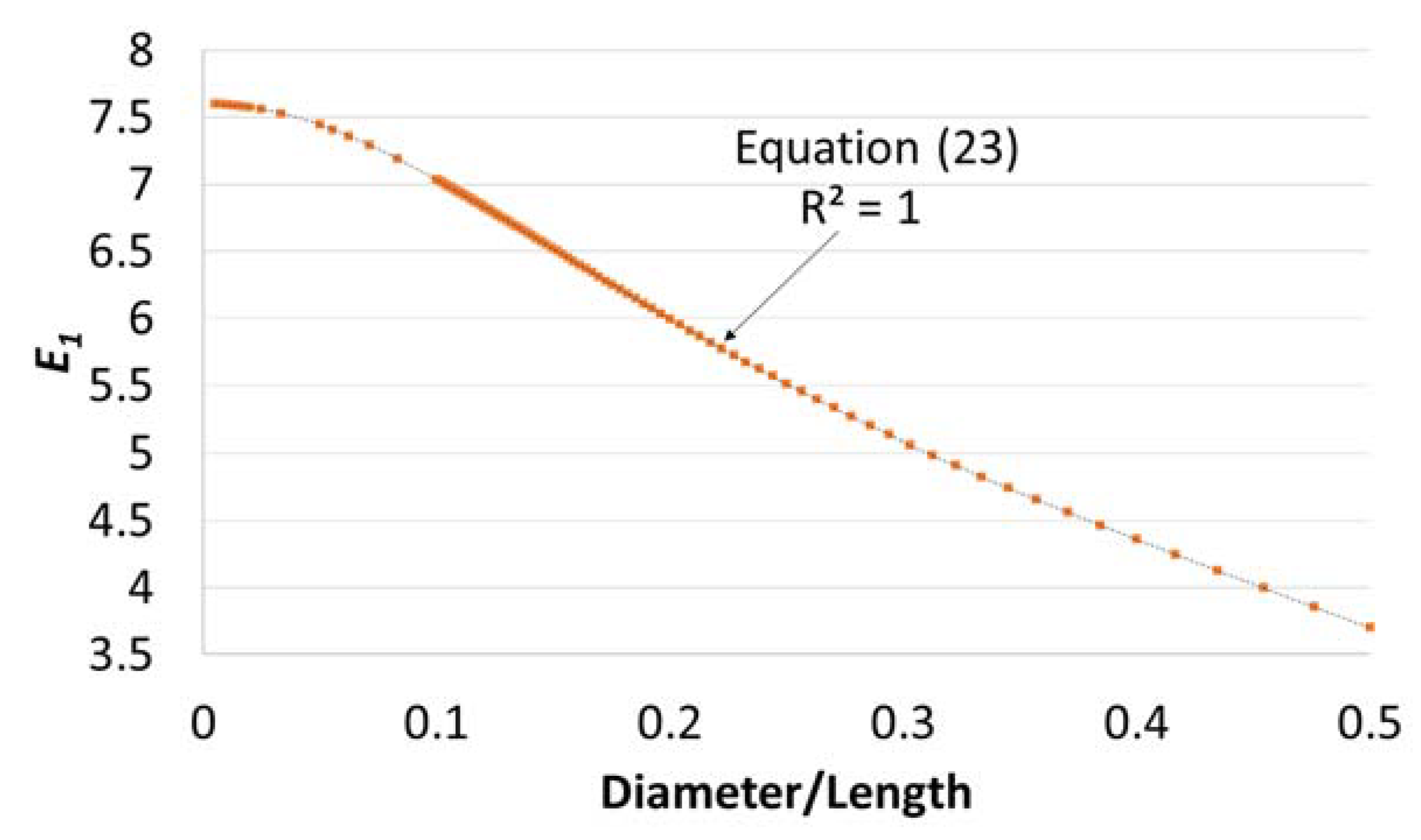
Unlike
B1, only a single polynomial expression is needed for
A1. Equation (13) was found from the best-fit curve shown in
Figure 4. Equation (13) can be used to obtain
for any diameter/length (
D/L) ratio:
Although the method presented above can be used to determine the dynamic elastic constants easily and quickly, it has two disadvantages. First, it requires a precise measurement of the torsional mode which is difficult to excite in a cylindrical specimen [
6,
12]. Additionally, it requires two separate experimental tests. Therefore, it would be beneficial to develop a method based on only the transverse bending modes which can be measured simultaneously and accurately. Similar to
, the ratio between the 2nd bending mode and the 1st bending mode was used to directly calculate Poisson’s ratio and the dynamic elastic modulus.
The ratio between the 2nd and 1st fundamental transverse frequencies,
, can be expressed with the following relationship:
where
is the 2nd fundamental transverse frequency (Hz).
and
are the roots from the frequency equation, shown in Equation (3), for the 1st and the 2nd bending modes. For a very slender rod, the relationship shown in Equation (15) can be derived to express
for a Euler–Bernoulli rod with free-free boundary conditions:
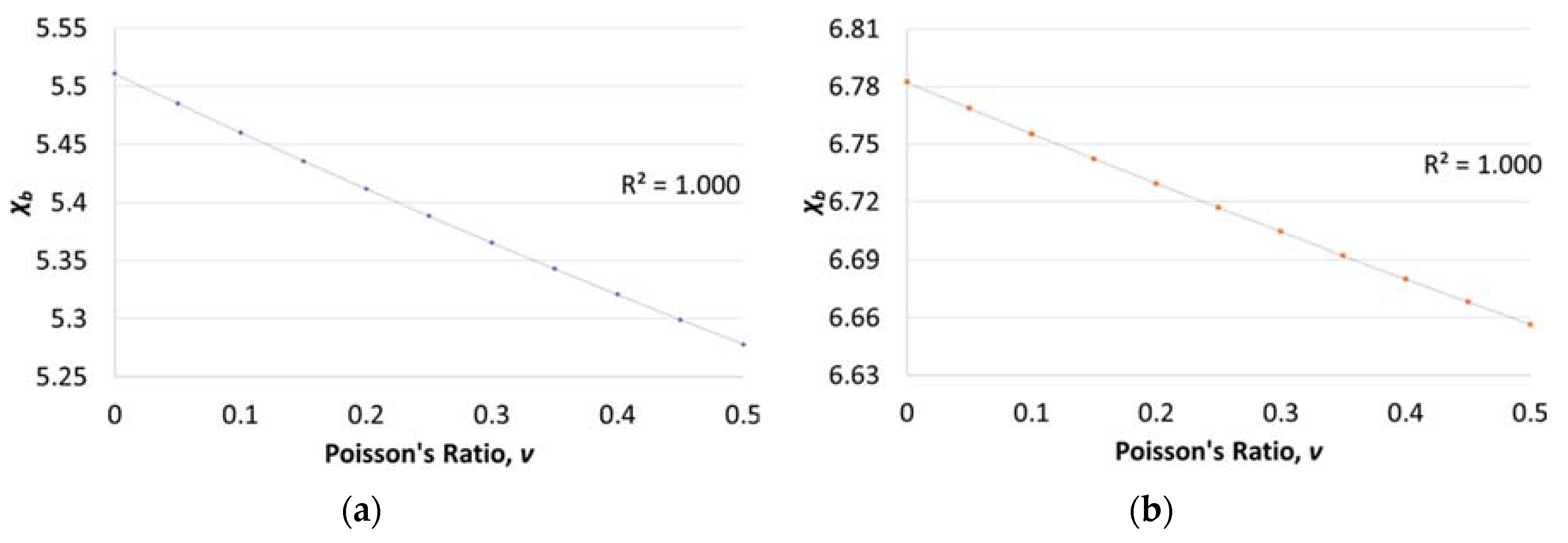
However, for the vibration of a non-slender rod,
can only be expressed with the roots of the Timoshenko frequency equation using Equation (3). Hence, Equation (14) was evaluated for a variety of Poisson’s ratios and rod dimensions as shown in
Figure 5. From
Figure 5, a slightly parabolic relationship between the Poisson’s ratio,
v, and the ratio
can be observed. A clear trend can be seen after normalizing the frequency ratio,
, with
at
v = 0 as shown in
Figure 5c. The y-intercept,
, corresponds to the value of
when
v = 0. It was found that the frequency ratio,
, is independent of the elastic modulus and the mass density, and
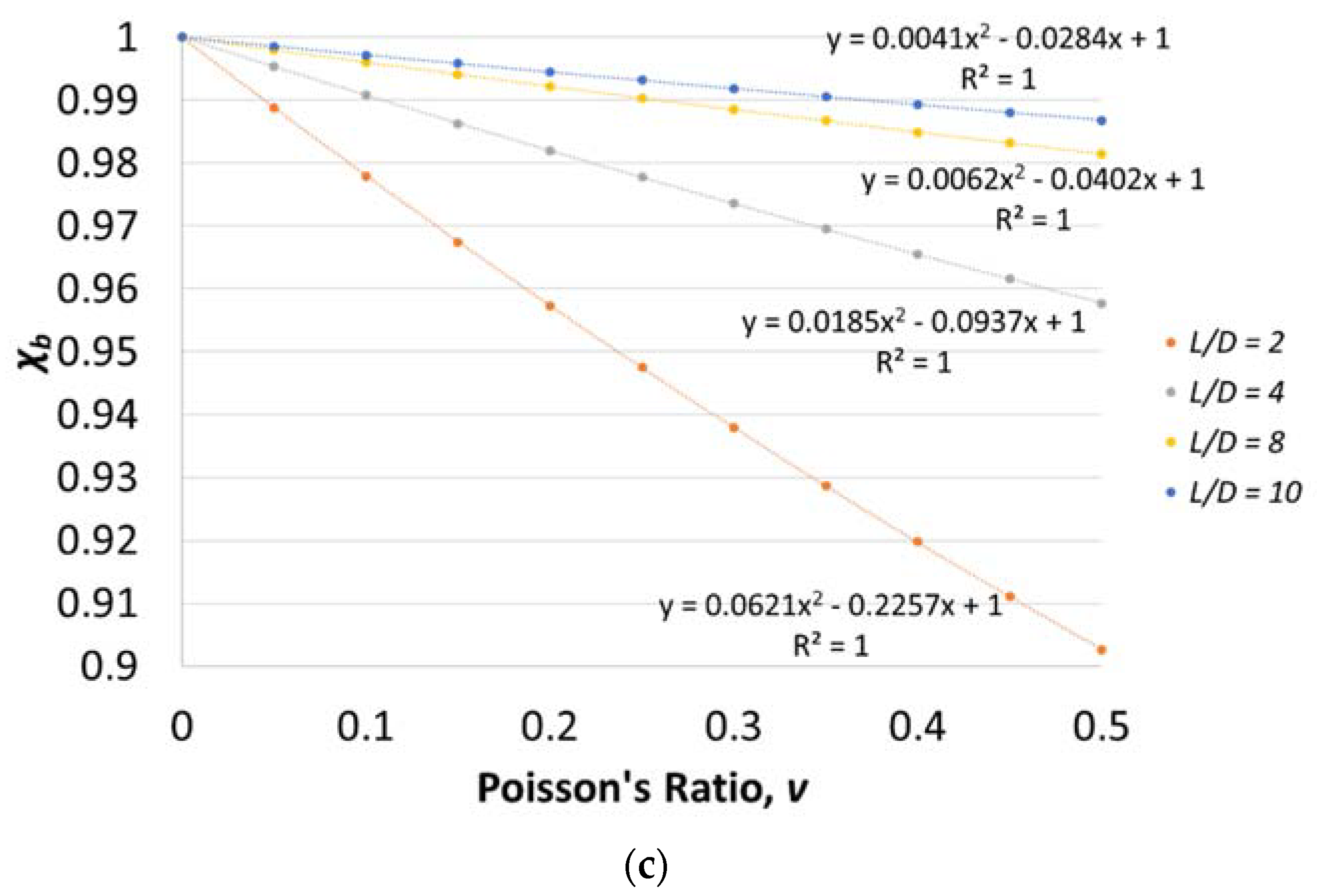
only depends on the roots of Equation (3). Hence, the ratio
can be expressed as Equation (16):
are the coefficients of the second-order polynomial describing the relationship between
and Poisson’s ratio.
Table 4 shows the calculated values of
,
, and
due to different Poisson’s ratio and length/diameter (
L/D). As expected, as the
L/D ratio becomes very large, the values of
and
approach 4.73 and 7.853. They are the same values shown in Equation (15) and correspond to a Euler–Bernoulli beam. For a very slender rod (
L/D = 200),
is no longer dependent on Poisson’s ratio and approaches a constant value.
The Poisson’s ratio can then be calculated using the equation below:
Therefore, Poisson’s ratio can be readily calculated using the experimentally measured transverse vibration frequencies,
and
. Furthermore, after knowing Poisson’s ratio, the elastic modulus can be determined using the first bending mode as shown in Equation (18). To find
, one can use Equations (7) and (8) and the calculated Poisson’s ratio from Equation (17). Hence, the elastic modulus can be calculated directly as follows:
The equation can also be used to determine the first bending mode solely from the dimensions of the rod and assumed elastic constants without solving the Timoshenko frequency equation. The values of
,
, and
for different specimen dimensions were found by calculating
for different length/diameter ratios as well as varying Poisson’s ratio (shown in
Appendix A). It is noted from Equation (14) that the frequency ratio
is only dependent on the roots of the Timoshenko frequency equation and is independent of the elastic modulus and mass density. Therefore, any set of material properties would produce the same values of
,
, and
. The values of
and its derived
,
, and
shown in this paper are only applicable to the 1st and 2nd bending modes of a Timoshenko rod with free-free boundary conditions. The constant
was found by calculating
when Poisson’s ratio was equal to zero. The calculated values for
are shown in
Table 5.
A similar procedure was carried out to determine the coefficients
and
. The transverse modes were determined using Poisson’s ratio ranging from 0.0 to 0.5 in increments of 0.05. After plotting
, the best-fit second-order polynomial was used to find
and
. The coefficient of determination,
, was above 0.999 for all the cases.
Table 5 shows the calculated values for different specimen dimensions. Unlike
, the coefficients decrease when the length/diameter ratio is enlarged. As the rod gets longer, the values of
and
approach zero, indicating that the rod behaves more like a Euler–Bernoulli slender rod. For larger length/diameter ratios (
L/D > 20),
approaches a constant value equal to only
.
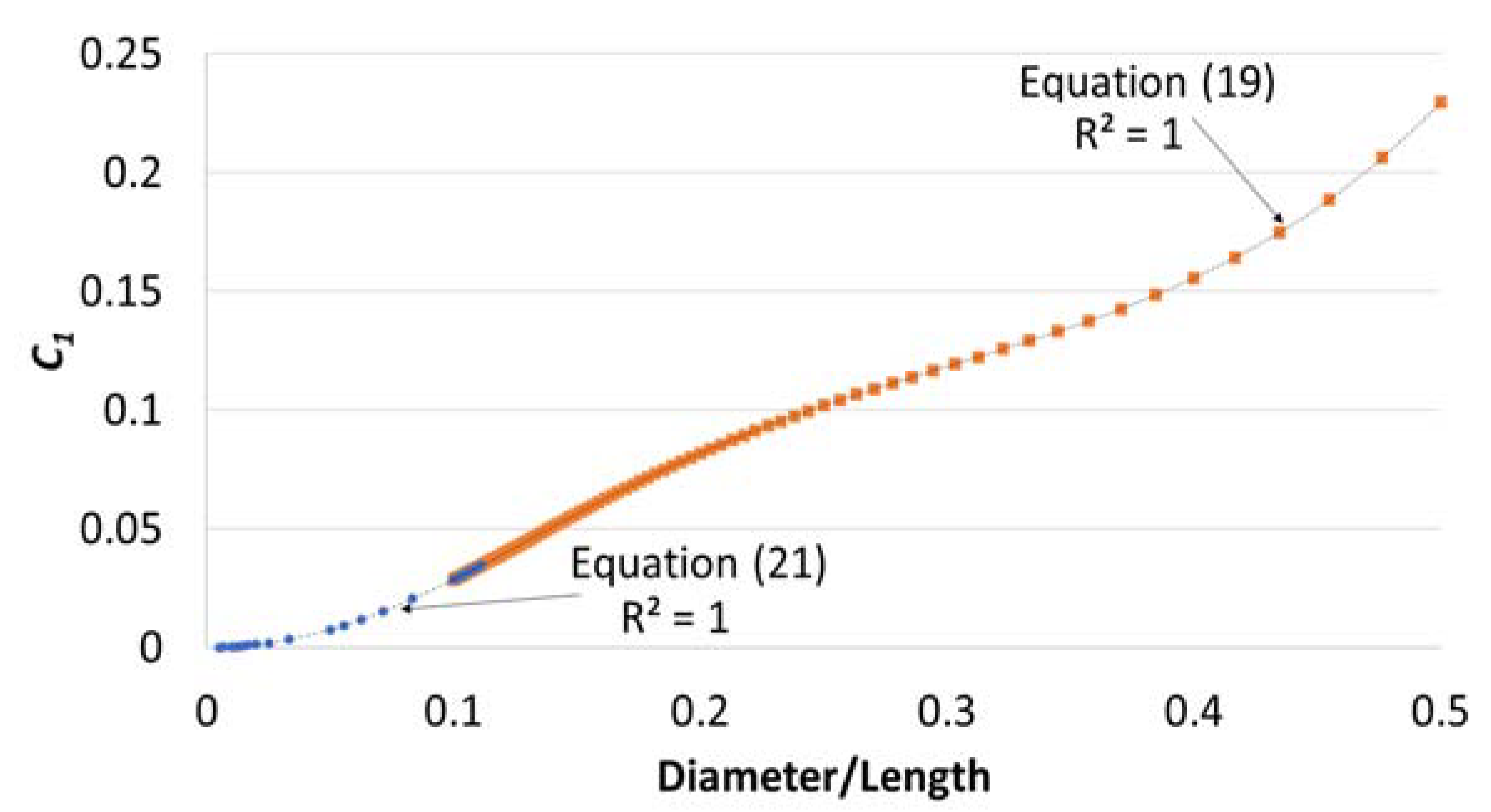
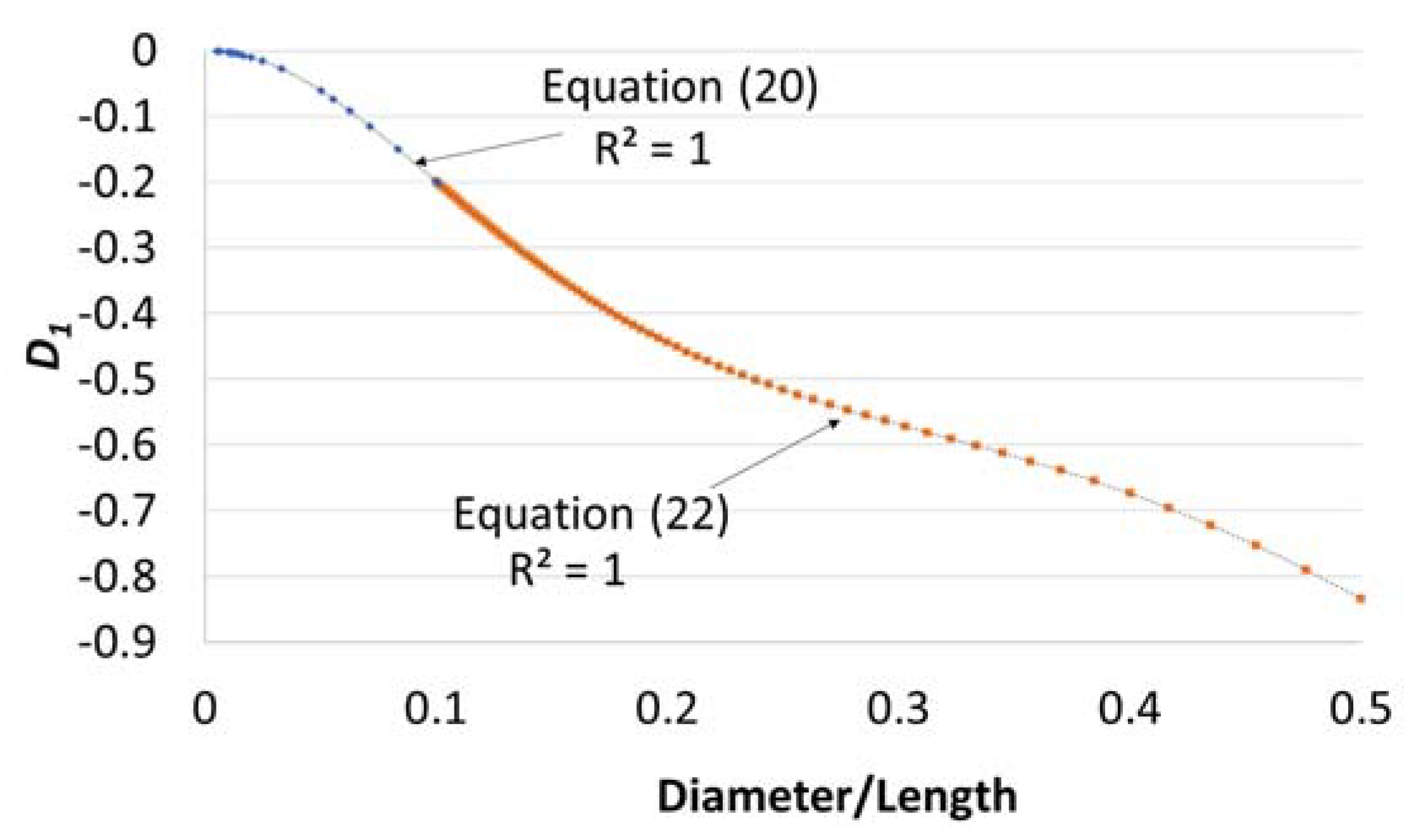
As shown in
Figure 6,
Figure 7 and
Figure 8, the three coefficients can be estimated using polynomial equations, and to increase the accuracy of the proposed method, two intervals are specified for
. A total of 97
L/D data points were used to determine the polynomials. The proposed equations can be used to find the coefficients for any
and allows for the calculation of the elastic constants after knowing the 1st and 2nd bending modes as well as the rod’s dimensions. The sixth-order polynomials were found to have a maximum percent difference of 0.12% with the theoretical values. On average, the percent difference was 0.01% indicating that the sixth-order polynomials can be used adequately to estimate the coefficients.
A single sixth-order polynomial can be used to estimate
. The equation is shown below:
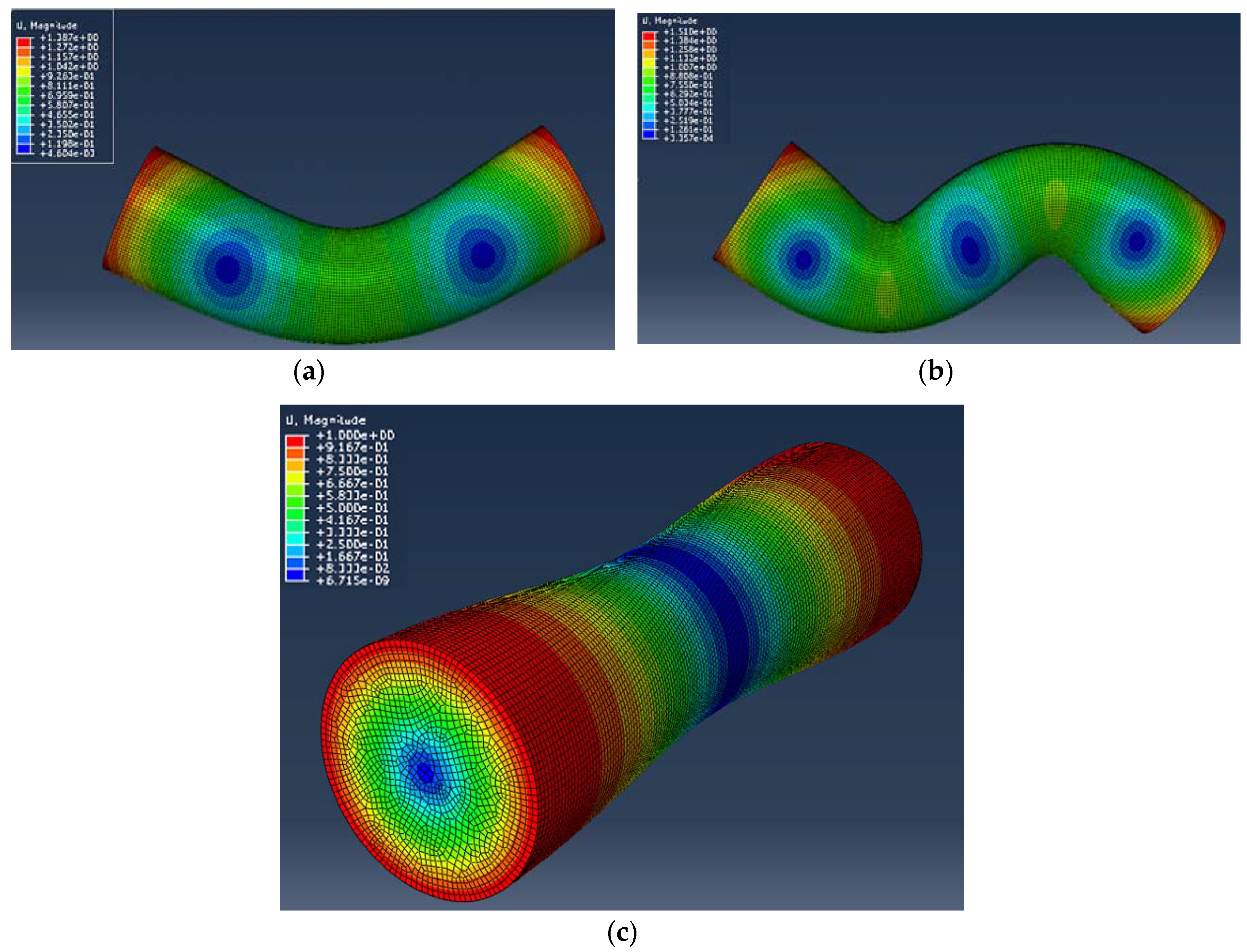
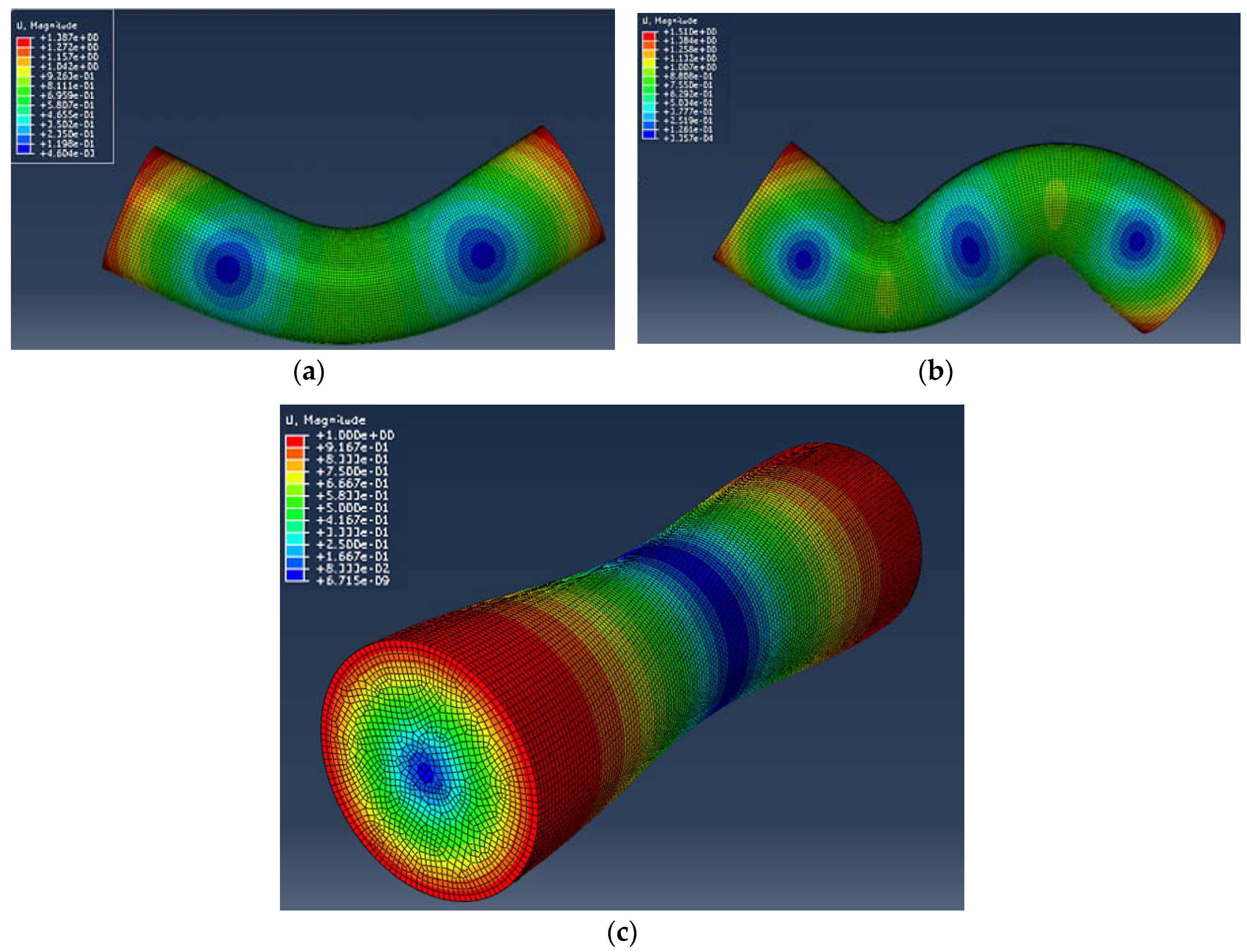
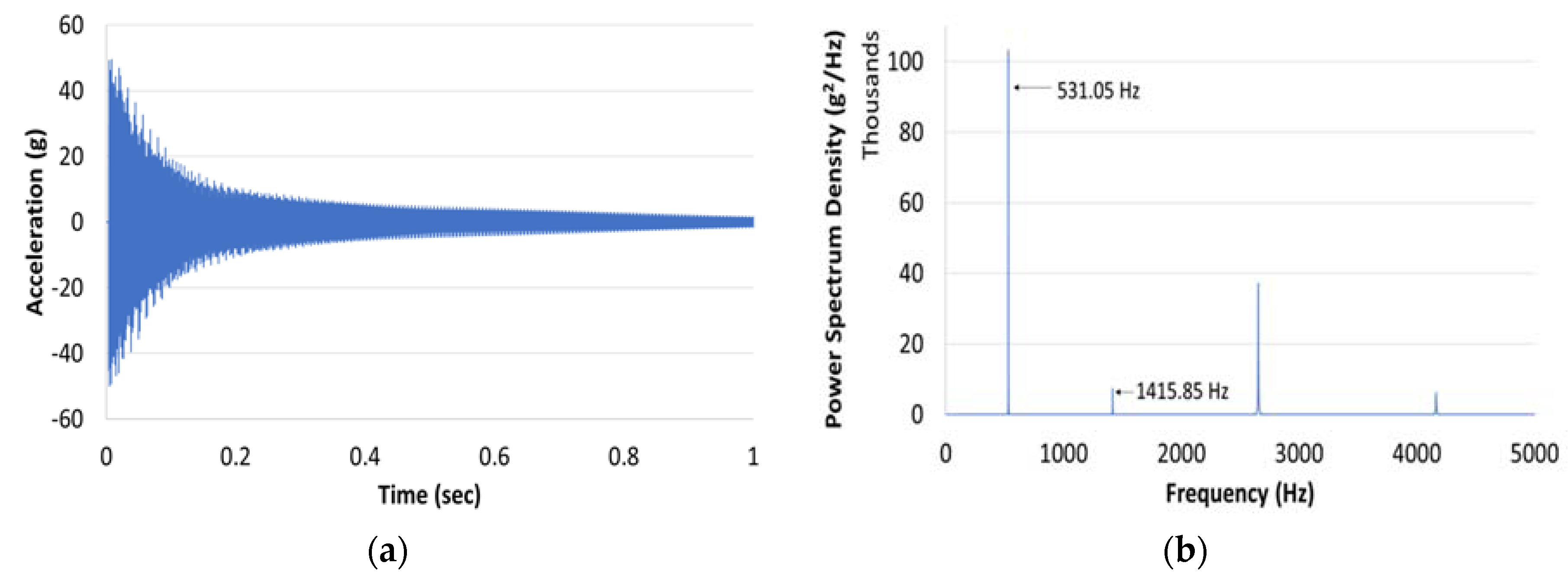
As an example, the FEM was performed for a steel rod with an assumed elastic modulus, Poisson’s ratio, and density of 200 GPa, 0.3, and 7750
, respectively. The values of
and
were obtained from Equations (11)–(13), whereas
were obtained using Equations (19)–(23).
Table 6 shows that the 1st and 2nd bending modes as well as the 1st torsional mode frequency calculated using Equations (9), (10), and (16) compare closely with the FEM results with a maximum difference of 0.36%.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}