1. Introduction
On average, vegetation fires burn around 760 Mha of land each year [
1]. Although fires may start naturally, they are often caused by anthropogenic factors, with catastrophic consequences [
2]. Indeed, wildfires are an important environmental problem in a wide range of global ecosystems [
3]. Scientific projections for the future of climate change predict more intense and prolonged droughts in certain regions, followed by heavy rainfall and flooding events [
4]. Such events are also becoming typical in the Mediterranean Basin, historically affected by intense wildfires that often result in large burned areas, having a significant impact on human lives [
5,
6].
Decision makers must carry out fire risk assessments to mitigate wildfires, including the identification of changes in fuel distribution, which requires time and skill and is costly [
7]. Fuel types play a crucial role in the propagation of fires in ecosystems. Within the Mediterranean basin, fuel is derived from plant communities varying from shrubland to pine forests [
8,
9]. A previous analysis of fire selectivity in Portugal found that coniferous forests and shrublands are more prone to fire than agricultural areas [
10,
11]. In Portugal, fuel types are dominated by evergreen sclerophyll shrubs, which cover an area of about 1.6 million ha or 18% of the total area of Portugal [
2]. In terms of wildfire mitigation, fuels can be treated to reduce fire hazards, which makes spatially explicit information and fuel mapping very important [
12,
13].
Following the development of fire behavior models, various fuel type classification systems have been created, e.g., Northern Forest Fire Laboratory–NFFL fuel models [
14] or Canadian fuel types [
15,
16]. Due to the difficulties of assessing and mapping different fuel types, specific classification schemes are required for use in similar environmental conditions [
17]. Considering similar spatial resolution and methodological approaches, fuel model assignment error is more likely to occur when a site-specific fuel classification system is used [
18], compared to a standard classification system, e.g., NFFL. For Mediterranean areas, fuel models (UC040) are adapted fuel models revised by the US Forest Service [
15] in the Andalucía (Spain) region [
19]. For the purpose of fuel classification, a national classification system was developed in Portugal [
13,
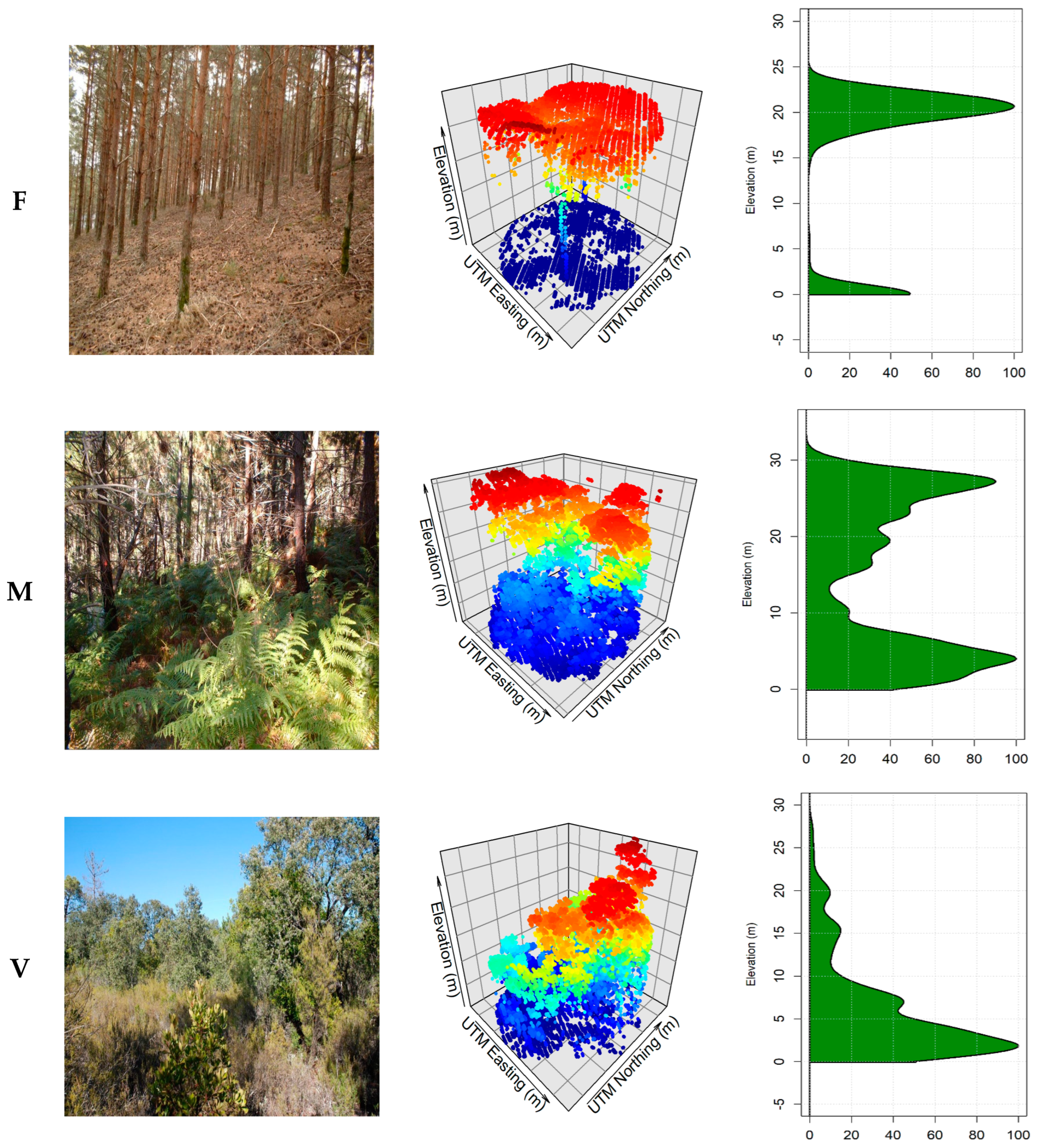
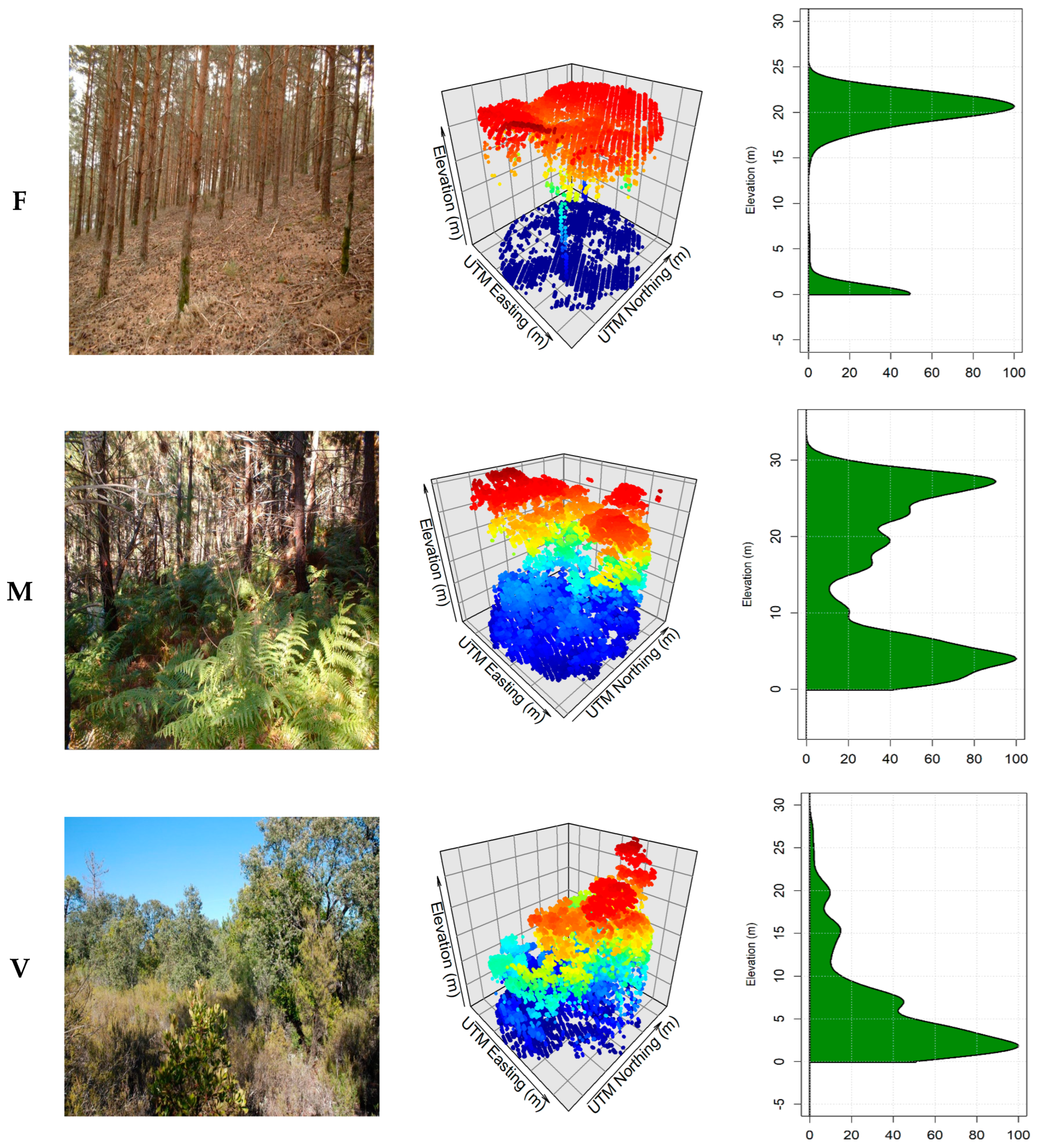
20]. The system considers a matrix of percentage of litter and vegetation cover, resulting in four main fuel model groups. (L–litter, M–mixed, D–discontinuous and V–vegetation) associated with 18 fuel models [
13].
Mapping fuel types is traditionally based on field surveys, which is challenging and expensive. However, remote sensing (RS) technology has made the entire process of mapping easier [
15]. The ability to extract information from vertical and horizontal structural components makes LiDAR RS a very important tool for forest fuel mapping across large areas [
18]. Various studies have addressed fuel type mapping on local, regional and global scales by using active and passive sensors [
21,
22,
23]. Passive sensors cover a wide range of wavelengths within the spectrum, which makes the images acquired very useful for species identification and fuel classification [
23]. However, passive sensors lack the ability to penetrate the canopy cover, and the data are therefore not suitable for describing forest fuel structure or understory vegetation composition [
24]. Active sensors are therefore very important for monitoring forests on a global scale [
25].
Two kinds of active sensors are used to map fuel types: LiDAR (Light Detection and Ranging), which uses light (in form of pulses) emitted from a laser, and RaDaR (Radio Detection and Ranging), which uses radio waves. As a result, LiDAR is used to estimate a variety of forest fuel variables, including canopy bulk density, canopy base height, canopy fuel load, and surface fuel metrics [
26,
27,
28,
29,
30,
31,
32]. In terms of forest fuel mapping and the estimation of biomass, several RaDaR detection systems such as Airborne SAR (AIRSAR), GeoSAR, and Intermap Technology Corporation are available for spatial monitoring [
33,
34]. A recent study has shown that combining both passive and active sensors improves the results of fuel mapping in contrast to using only a single data source [
35]. While multispectral passive sensors can be used to estimate species composition based on spectral response, LiDAR active sensors can extract the vertical forest structure, and therefore, the combined use of both types of sensors provides a novel and unique approach to mapping fuel types [
7,
36,
37,
38]. For instance, in a study undertaken in three different Mediterranean forests dominated by pines [
17], satisfactory results were obtained when fuel types were mapped using ALS and Sentinel 2 data. Another study assessed the understory forest structure in combination with ALS and LANDSAT time series [
39]. Most studies in the Mediterranean basin are based on the Prometheus Fuel Classification Scheme [
17,
40,
41], but other classification schemes have also been used [
37,
42]. However, it is important to highlight that Prometheus Fuel Classification has the disadvantage of not being calibrated for local conditions [
43].
Although fuel mapping in Mediterranean ecosystems has been previously addressed [
17,
44,
45,
46,
47,
48,
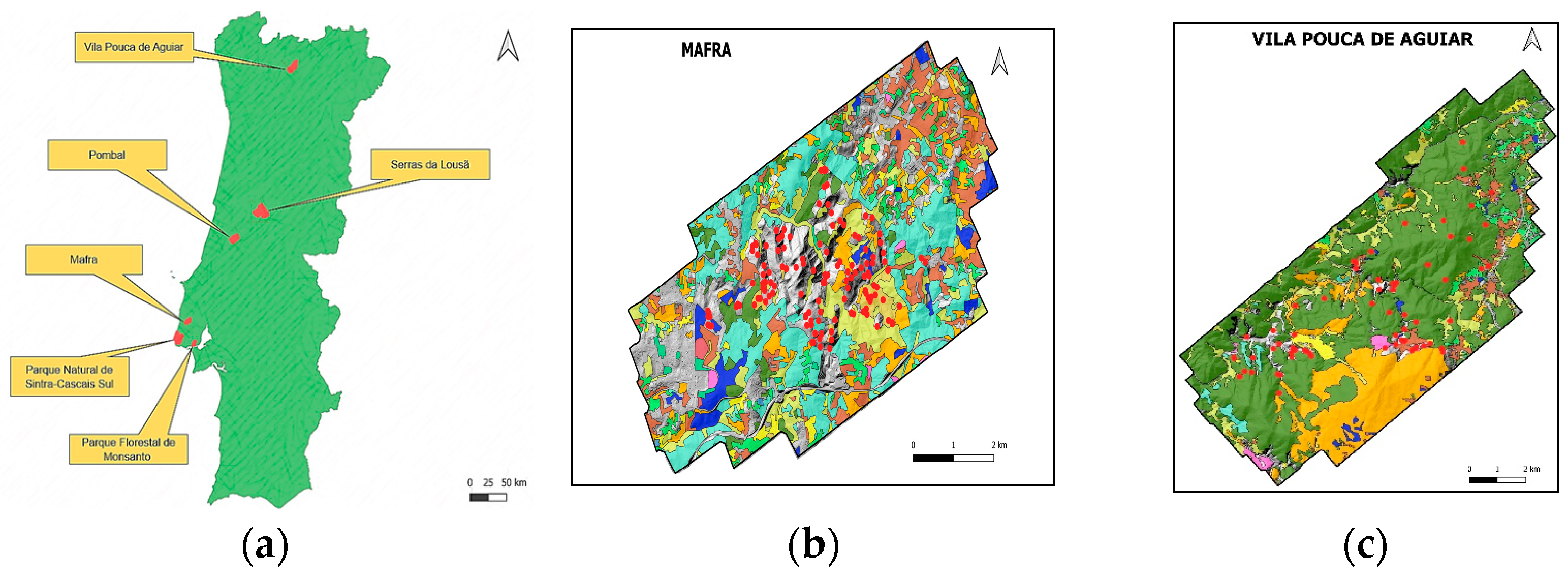
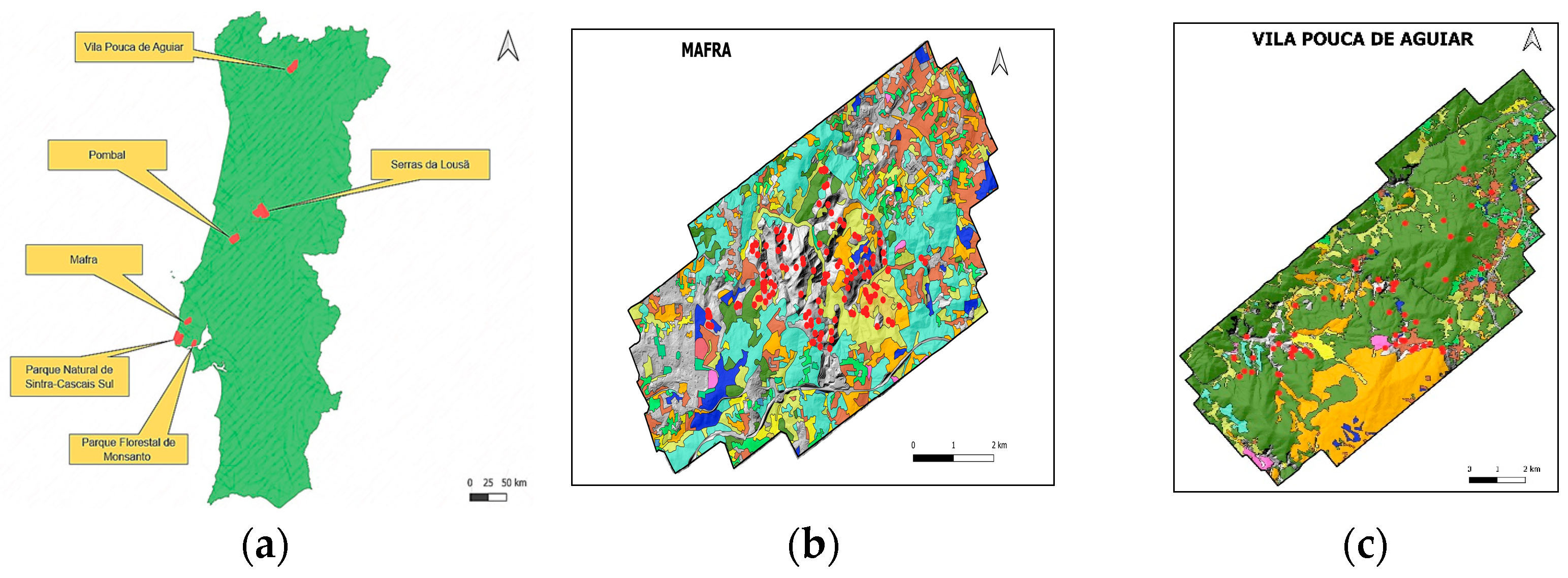
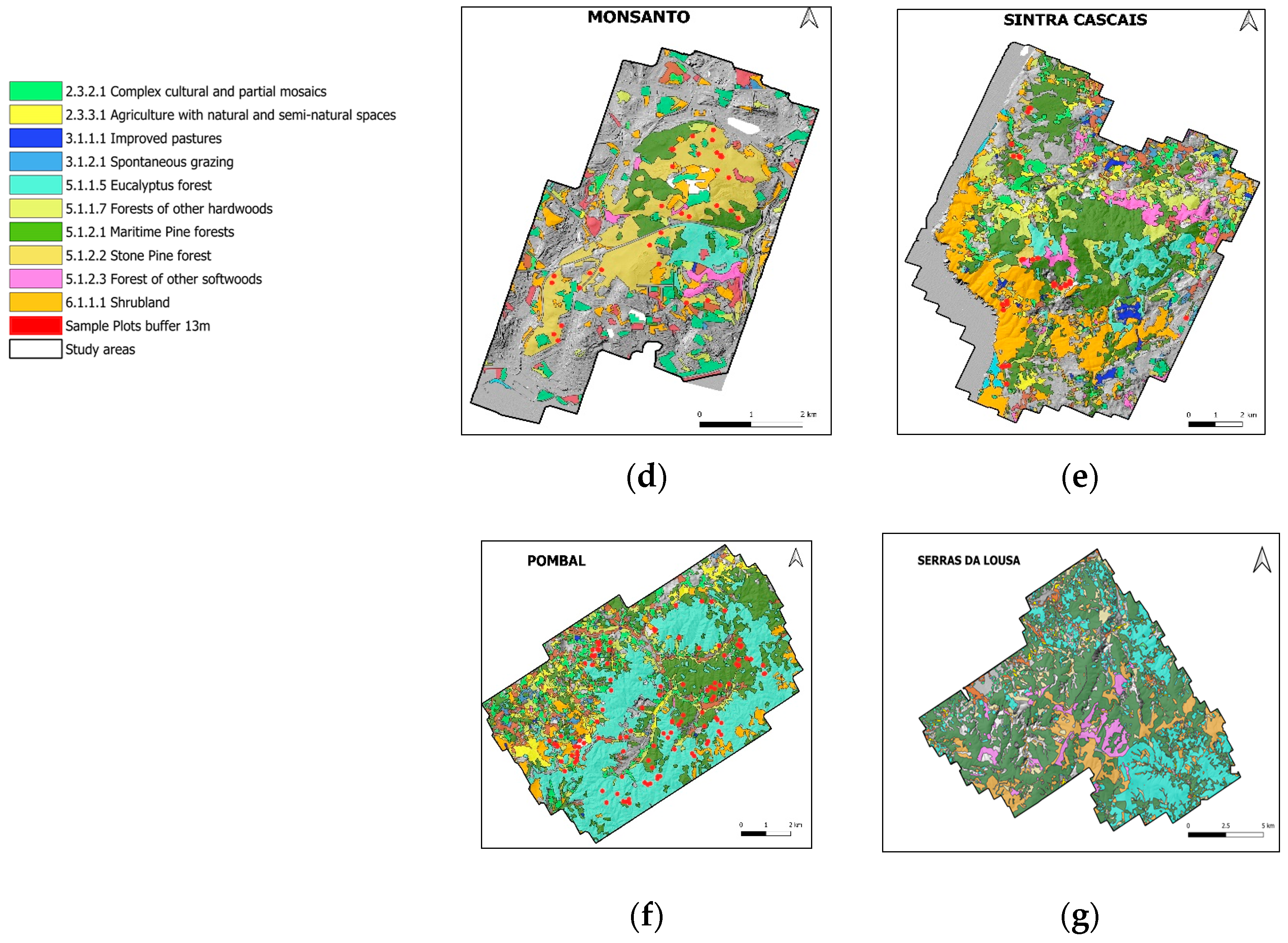
49], there is a lack of research on the combined use of medium resolution multispectral and ALS data. To the best of our knowledge, no previous studies have developed simple, robust, and parsimonious models to provide forest managers with an alternative classification method for mapping Portuguese fuel models based on ALS data. On the other hand, very few studies have evaluated the impact of canopy cover and pulse density on the performance of fuel model classification in Mediterranean areas. Finally, this work aimed to develop the first fuel model classification in Portugal using C-band and L-band (SAR) backscatters, with multi-temporal Sentinel 2 and ALS data associated with a detailed field survey. In this regard, the goal of this study was to combine all sensor data, evaluate the performance of the models, and classify the fuel models according to the national fuel scheme within six study areas in Portugal.
The main objective of this research was to evaluate the potential of discrete return LiDAR data to classify fuels in six study areas in Portugal. The specific research objectives were as follows:
- (1)
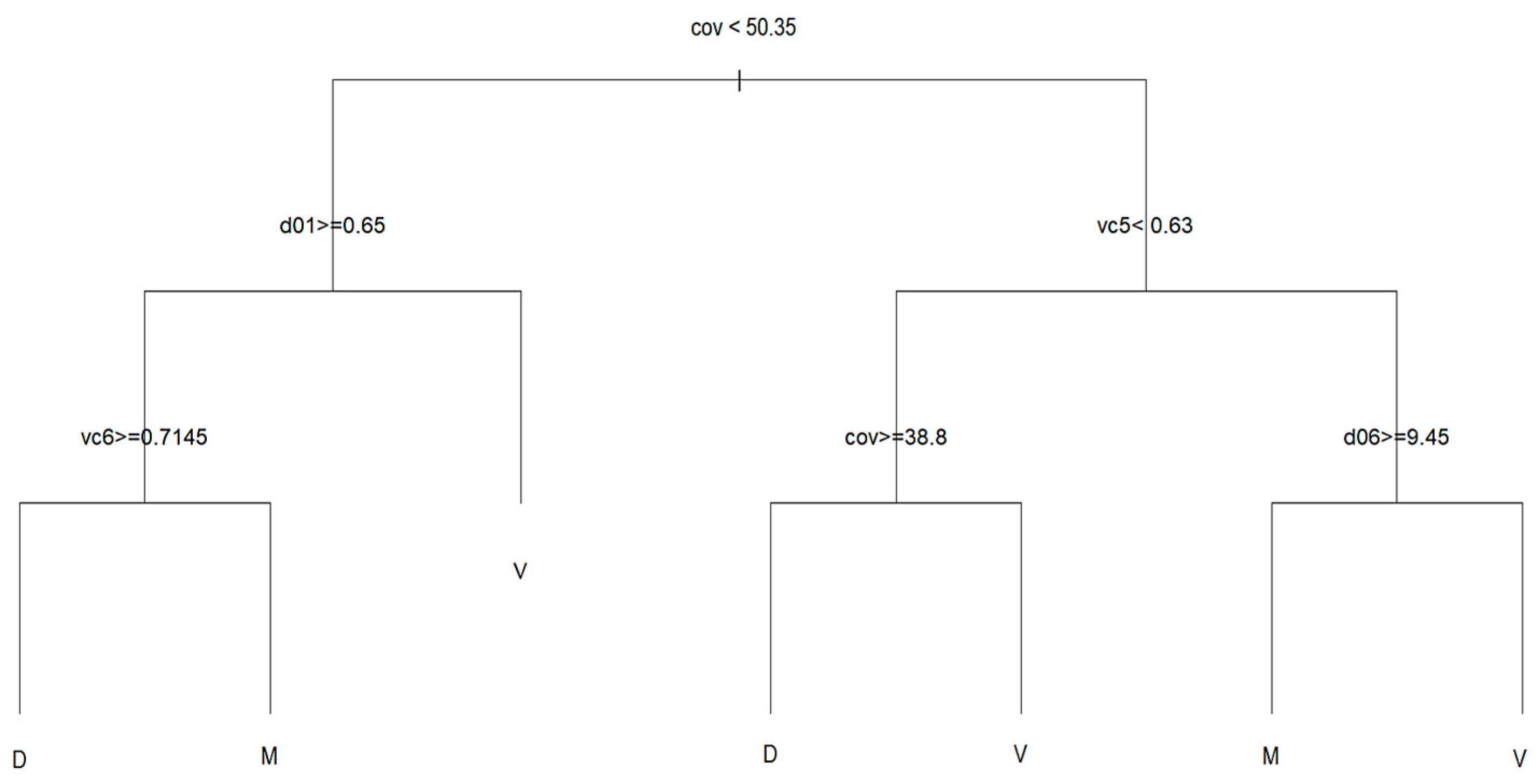
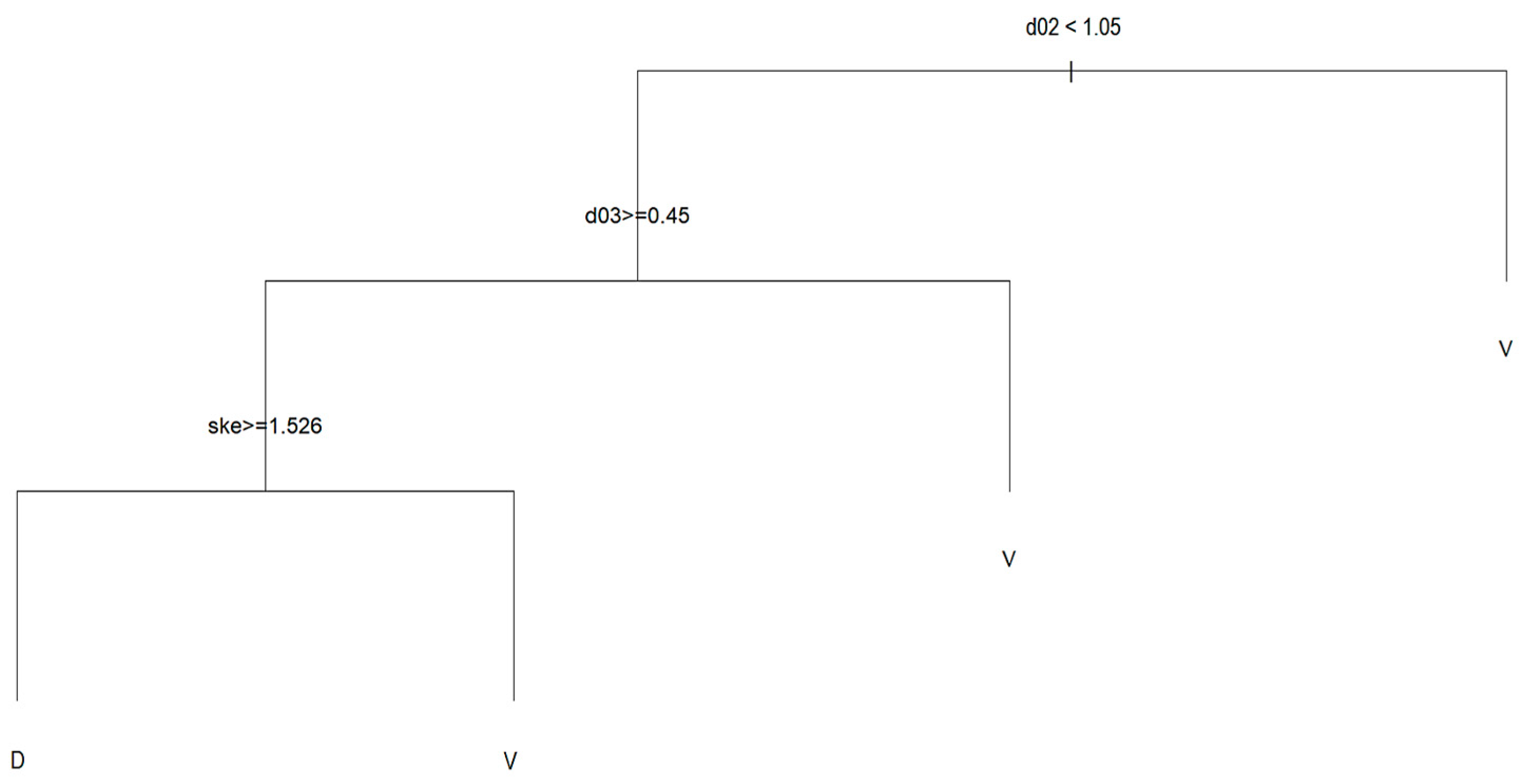
Classify the four main fuel type groups in Portugal using Simple CART and RF models;
- (2)
Analyze the effect of canopy cover (CC) in Portugal on fuel classification accuracy;
- (3)
Investigate the performance of the models to classify the fuel types using different pulse densities (5 and 10 points m2);
- (4)
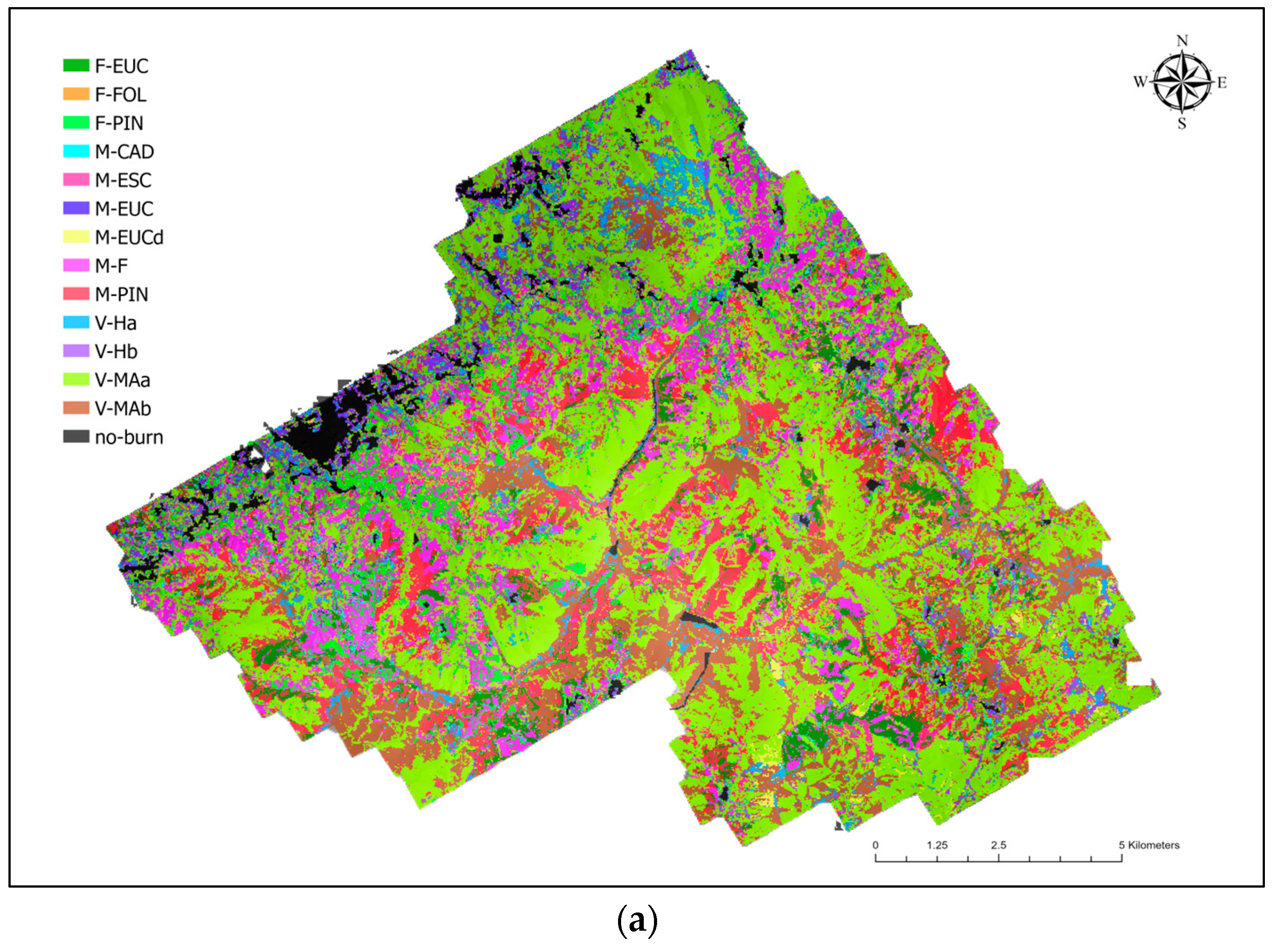
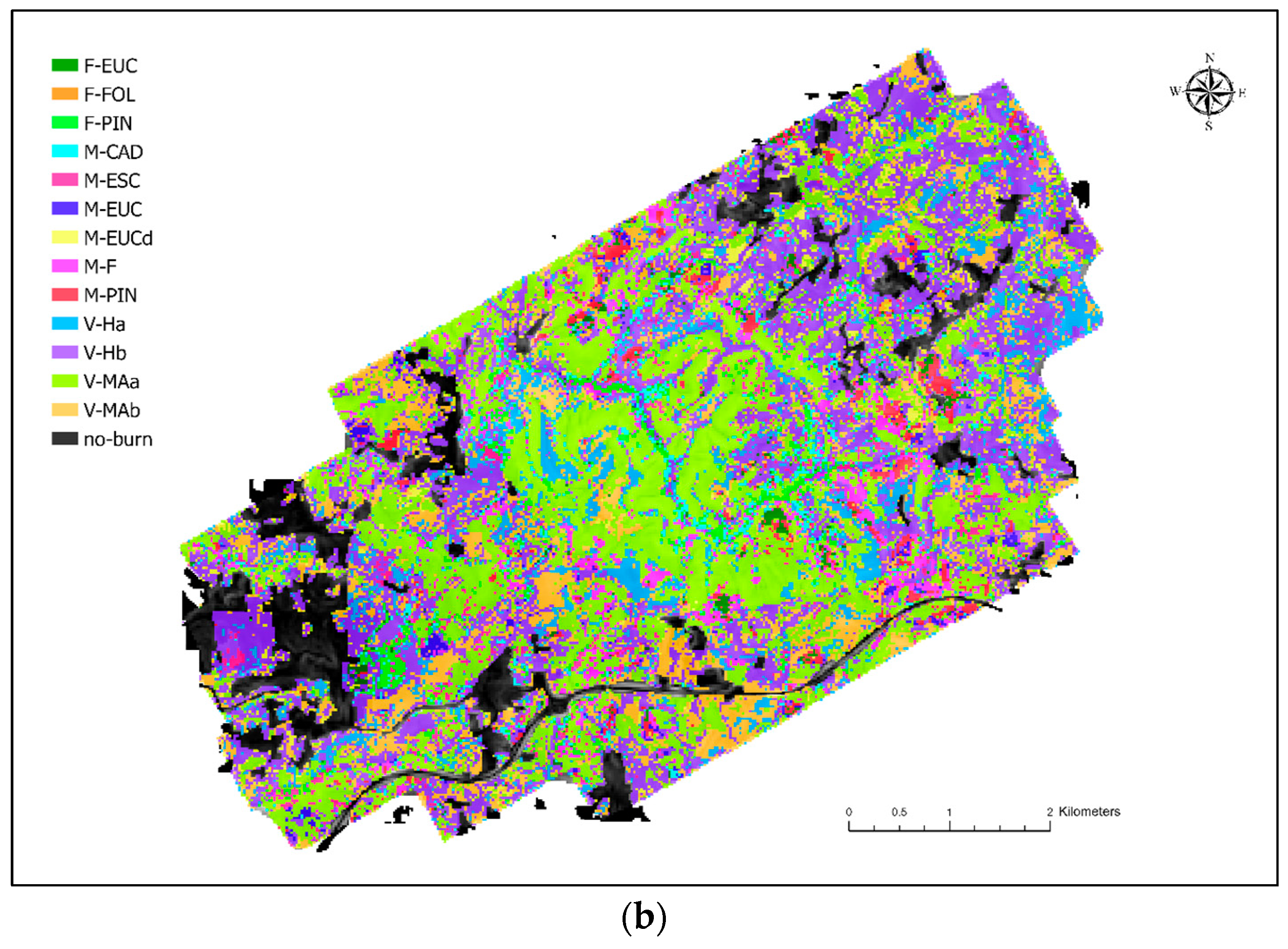
Map fuel models by combining ALS data, Multispectral Satellite Imagery (S2) and C-L band SAR data (S1 and ALOS-2/PALSAR2 Satellite).
4. Discussion
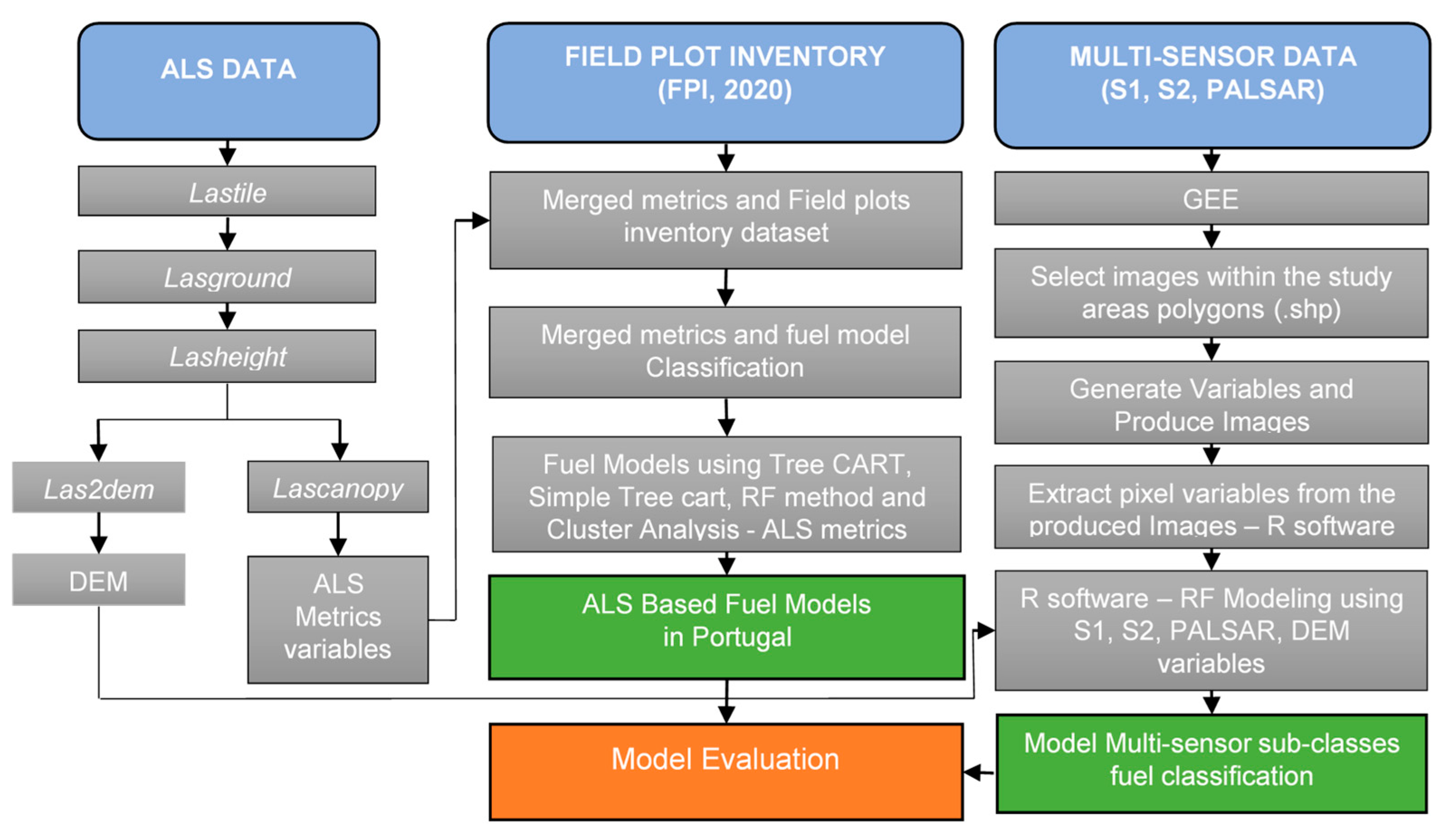
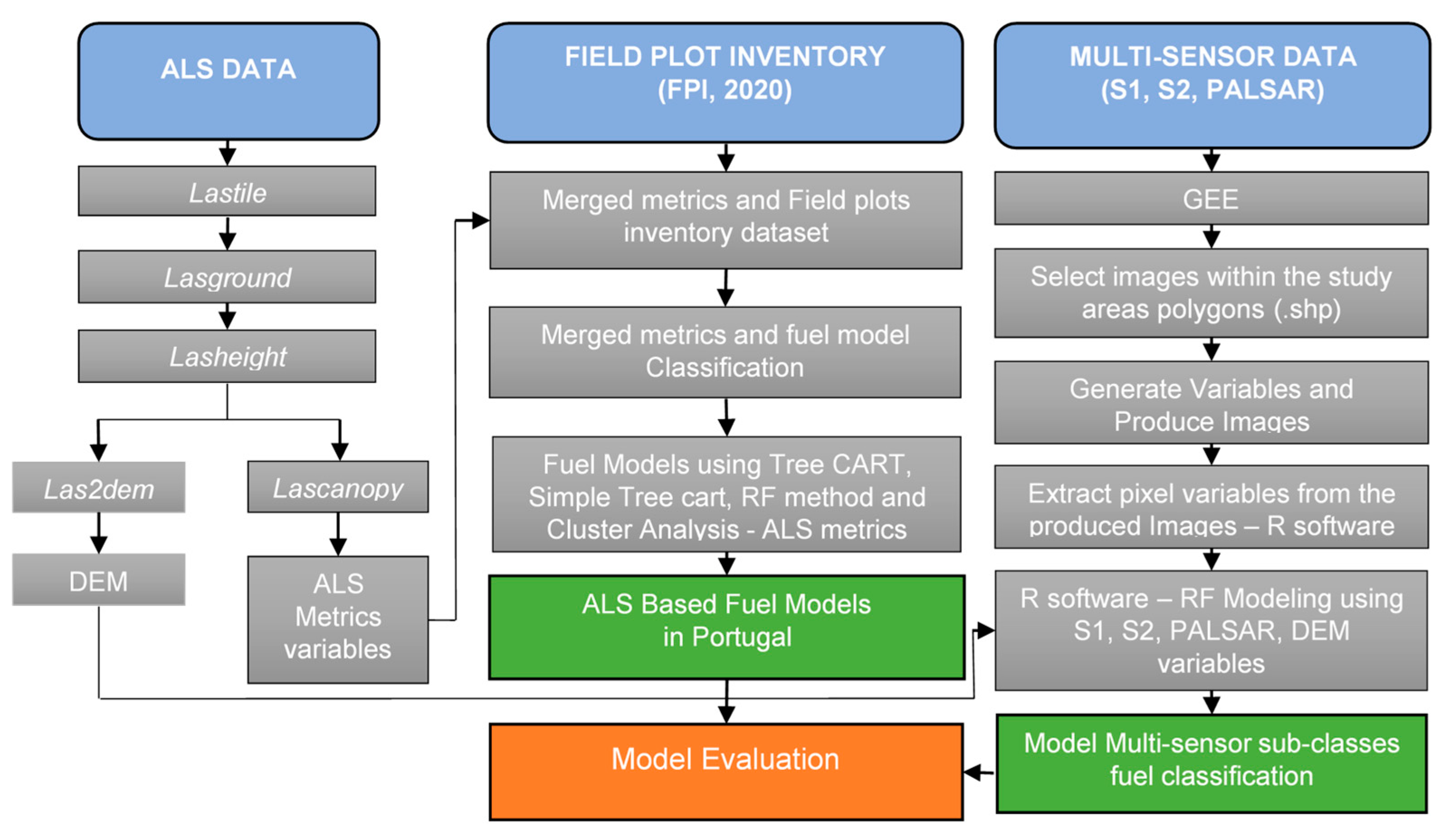
This study investigated the usefulness of medium point density ALS data, S1, S2 and PALSAR data to classify and map fuel types in six topographically varied areas, with complex land cover, in Portugal. The models used quantified the relationship between ALS and field-based measurements, assessing the effects of canopy cover and of pulse density. We also assessed the performance of multi-source sensors for classifying a large number of fuel types, combining ALS, S1, S2, and PALSAR data.
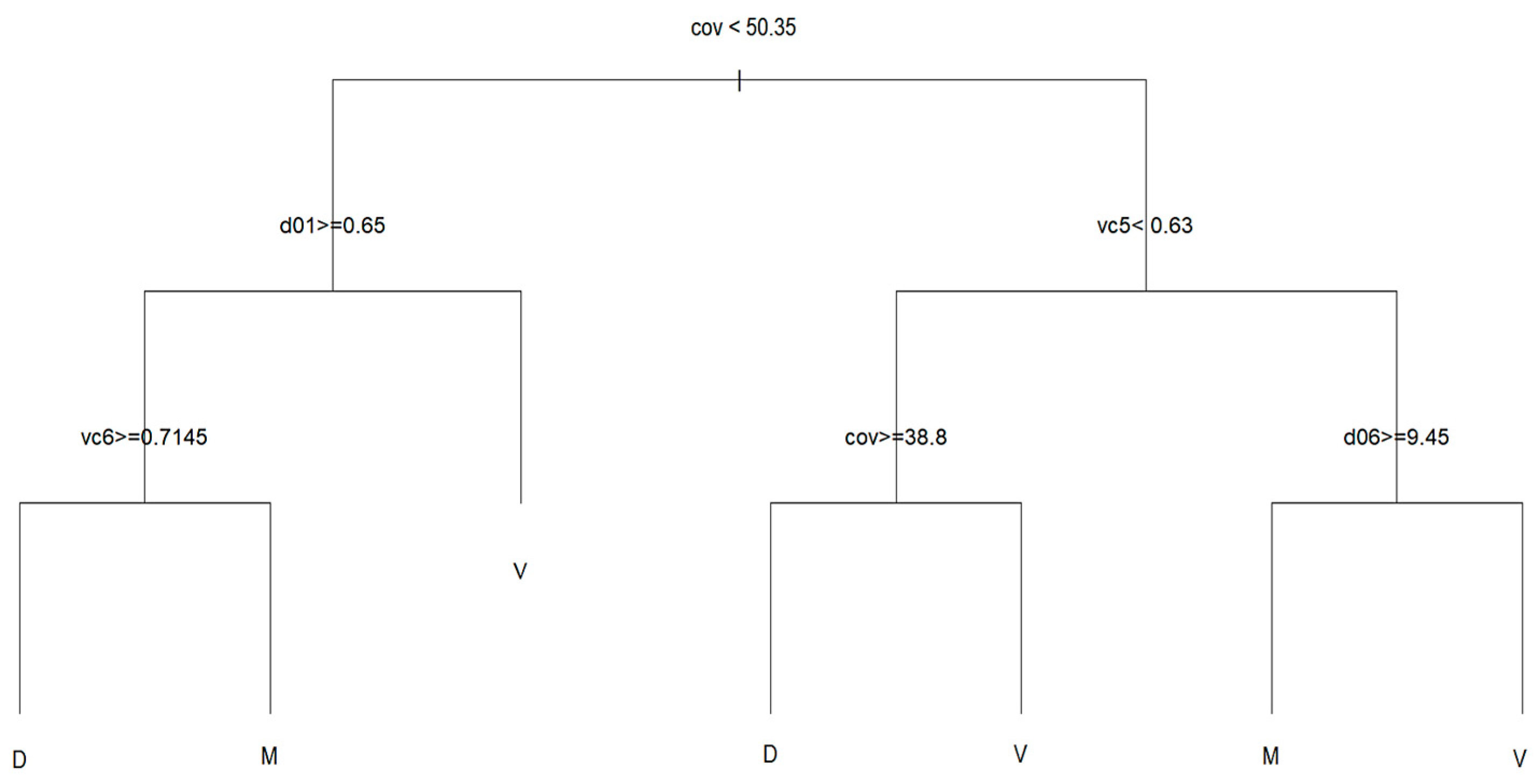
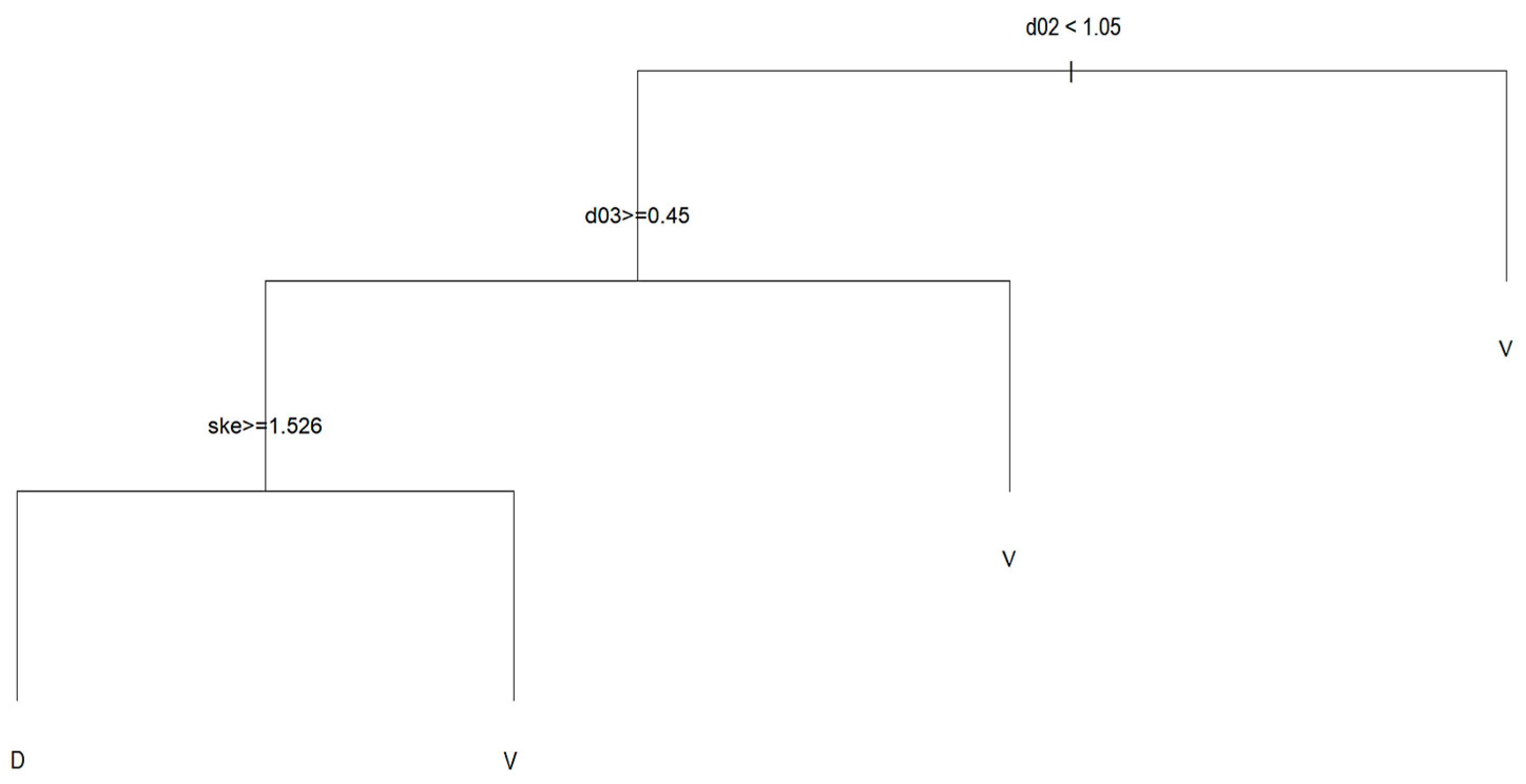
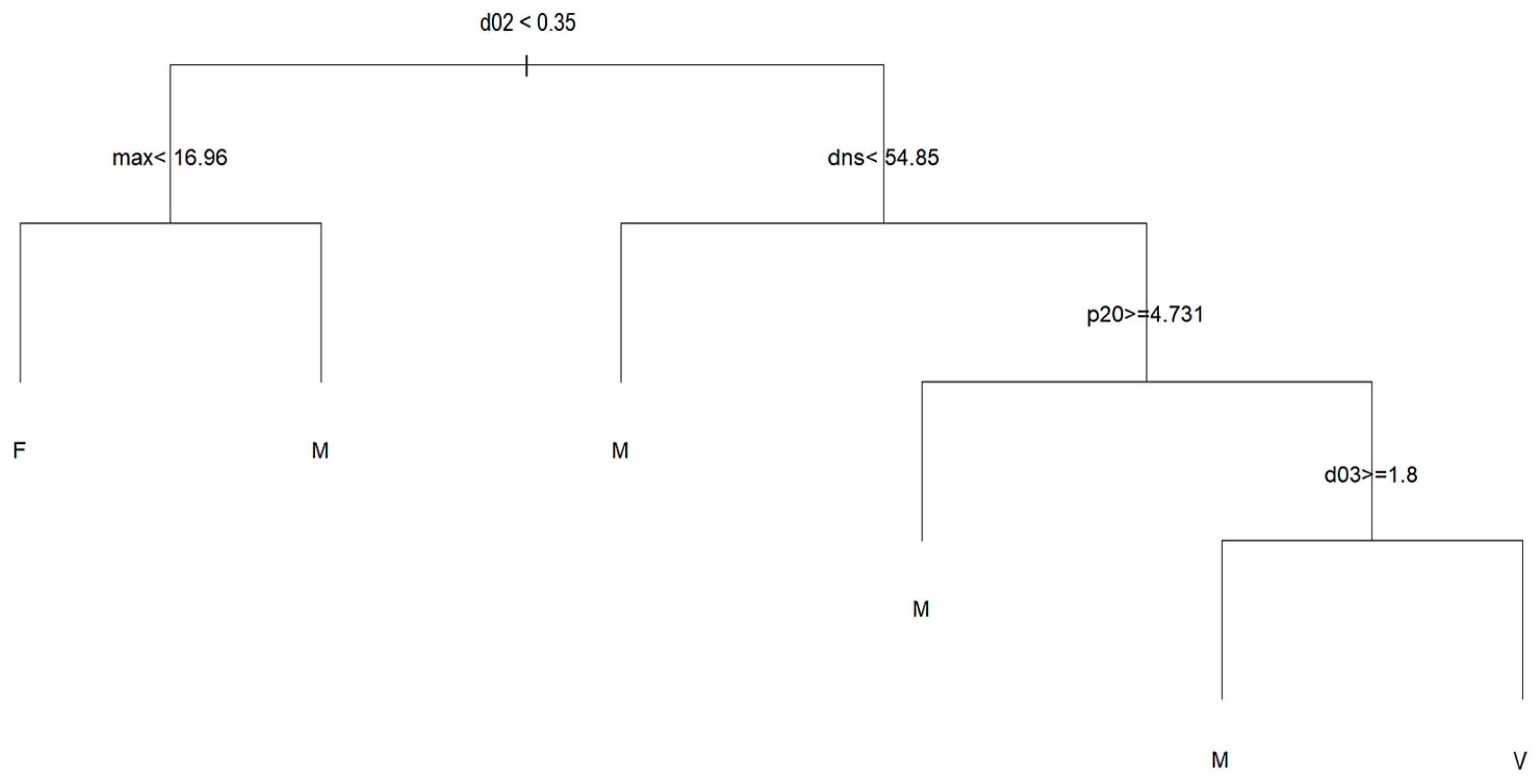
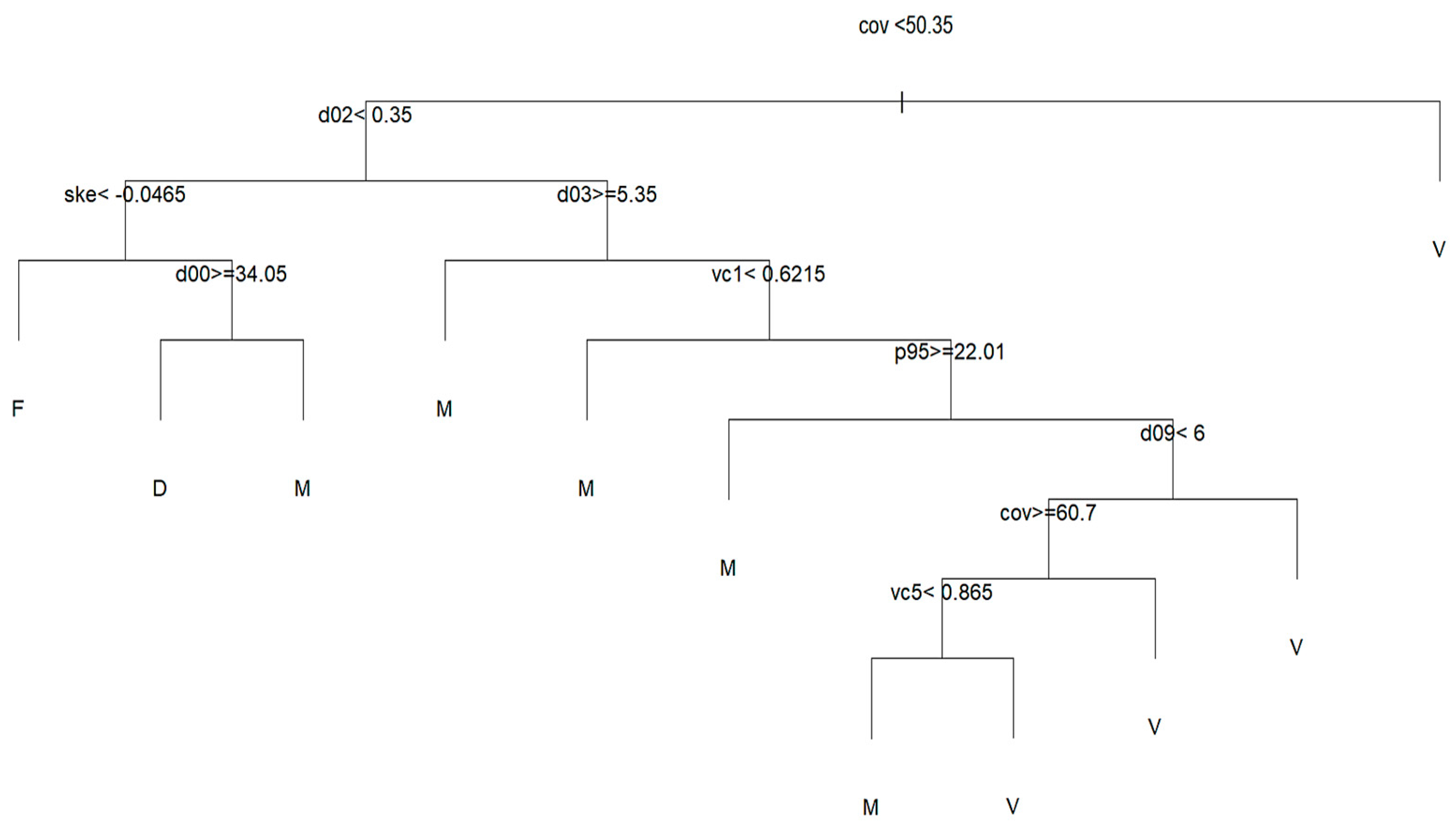
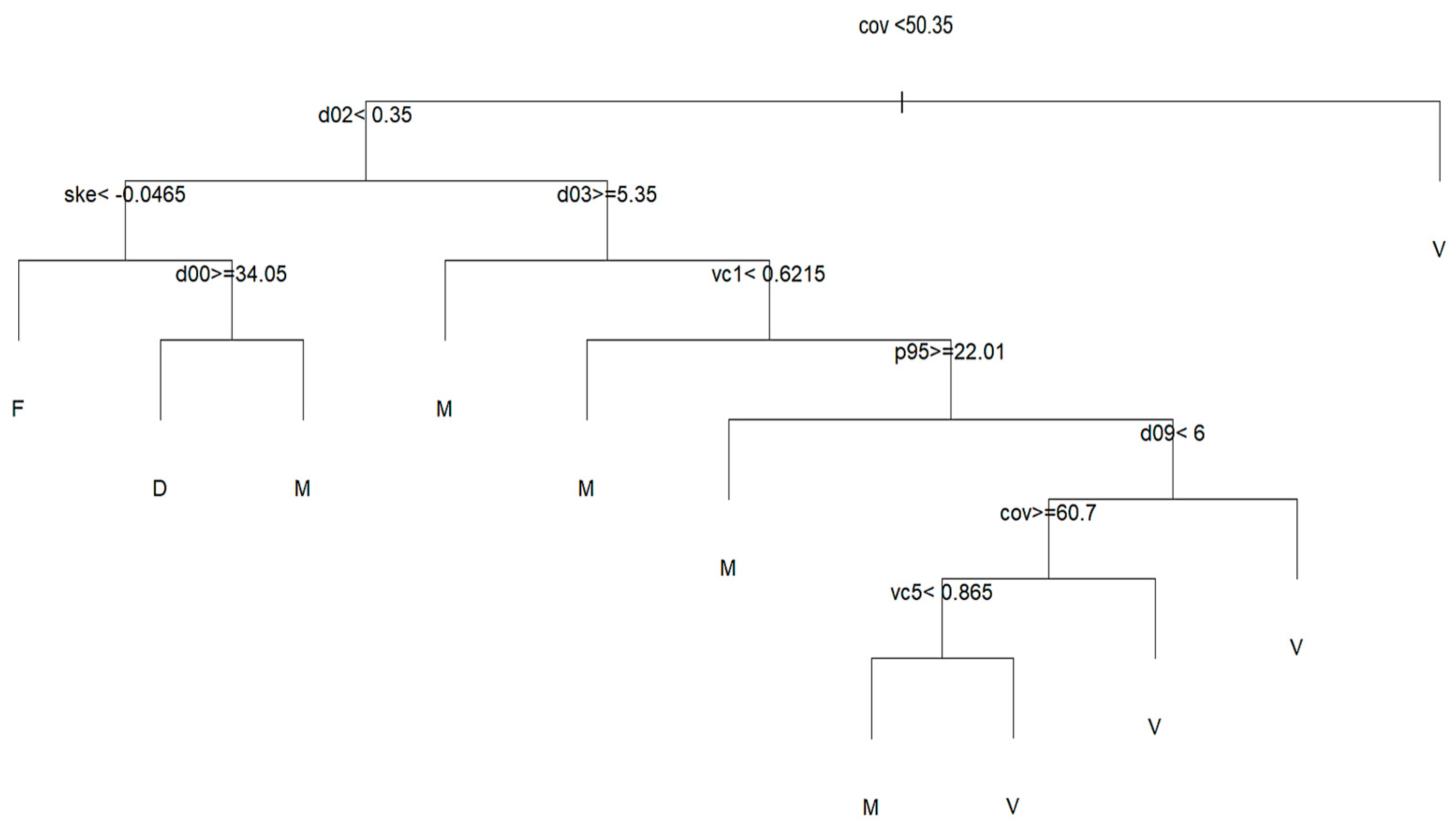
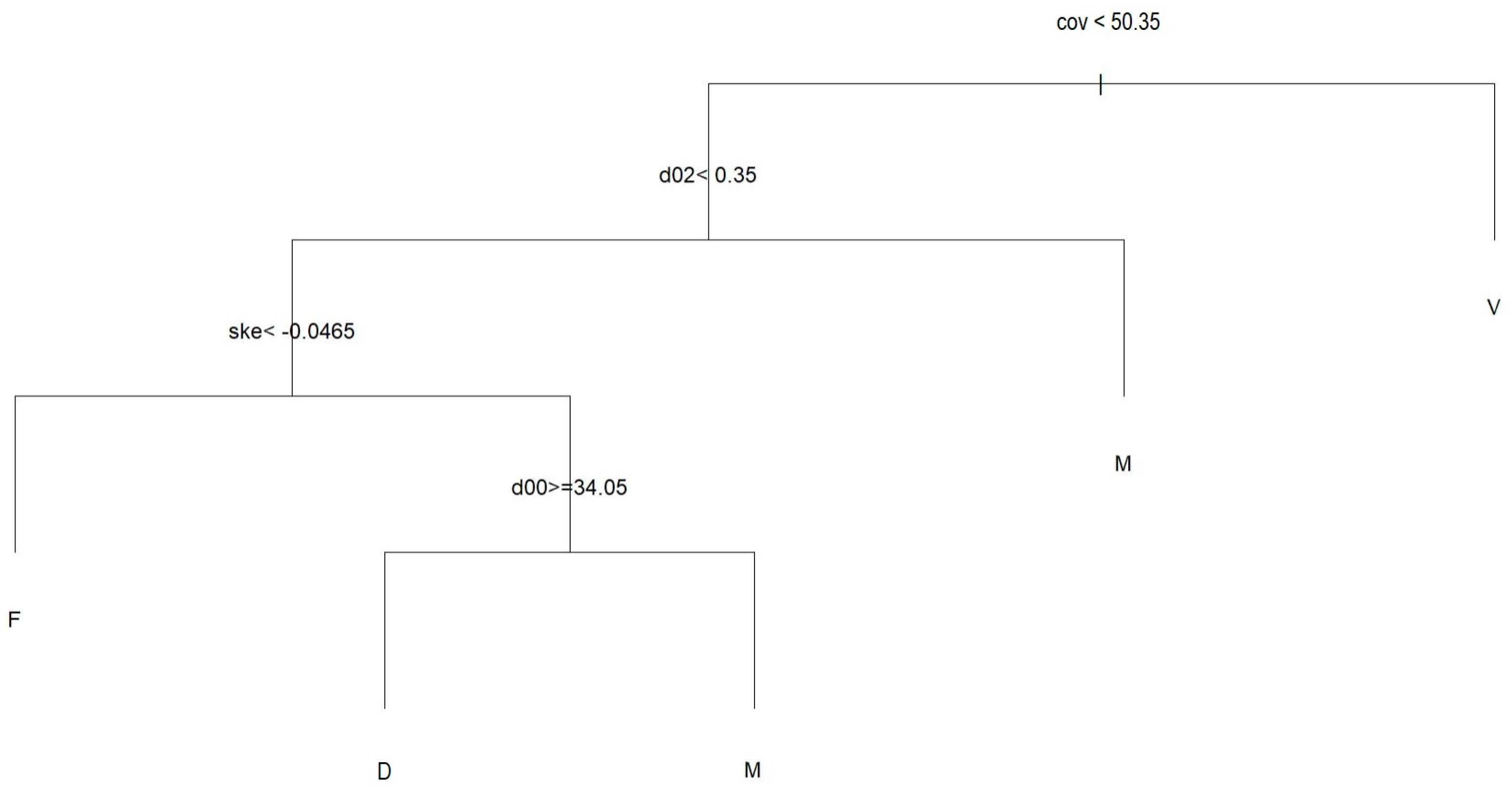
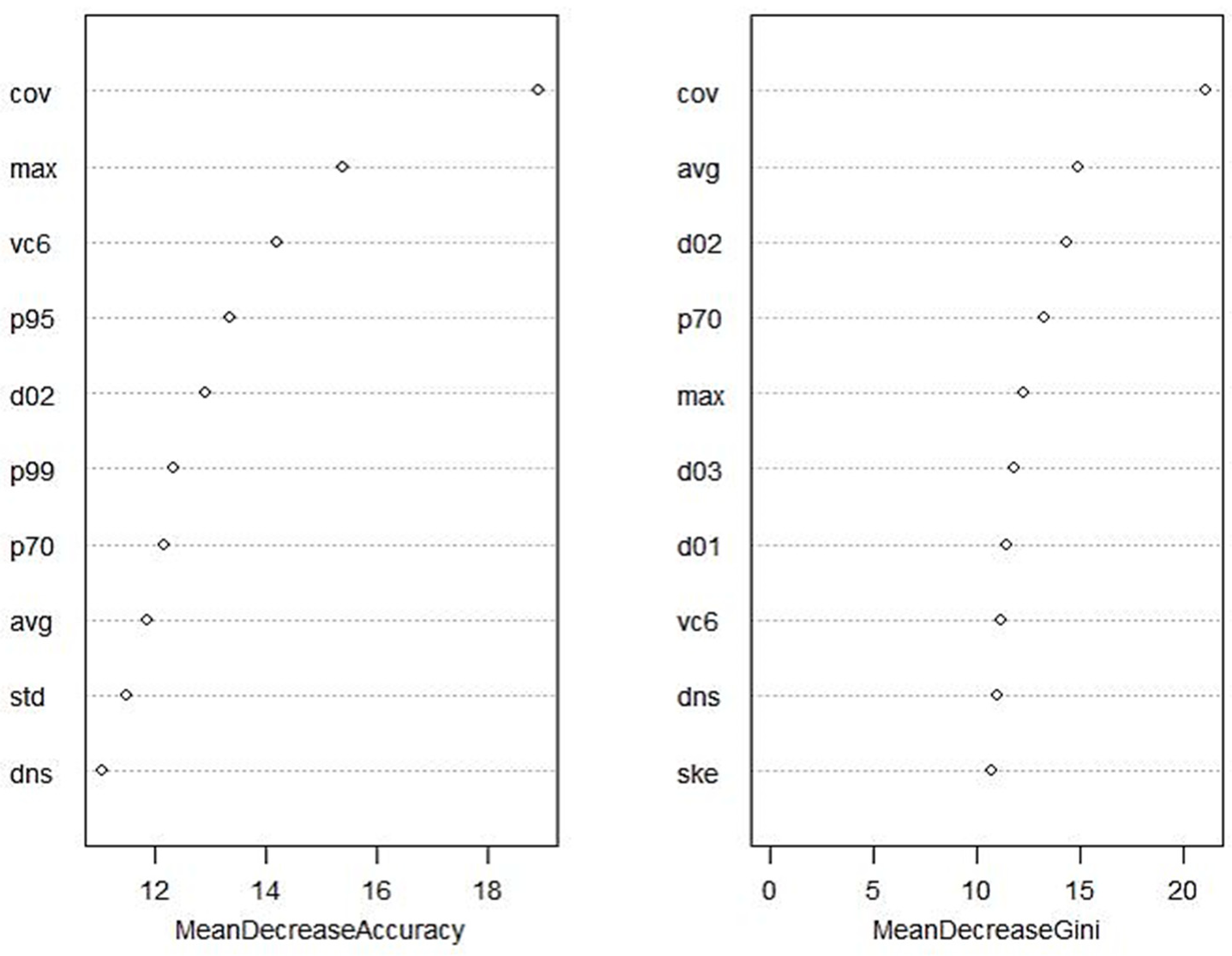
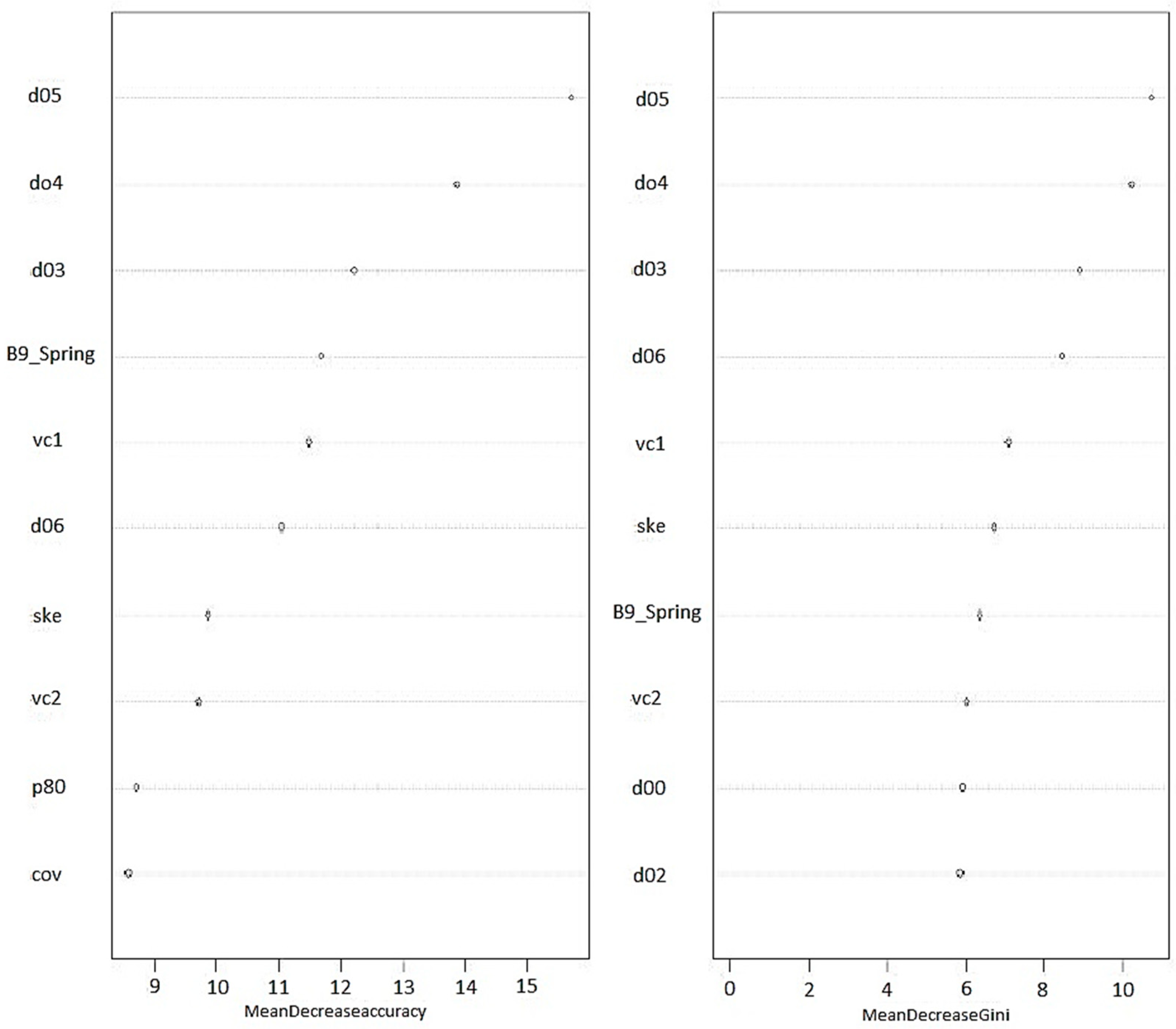
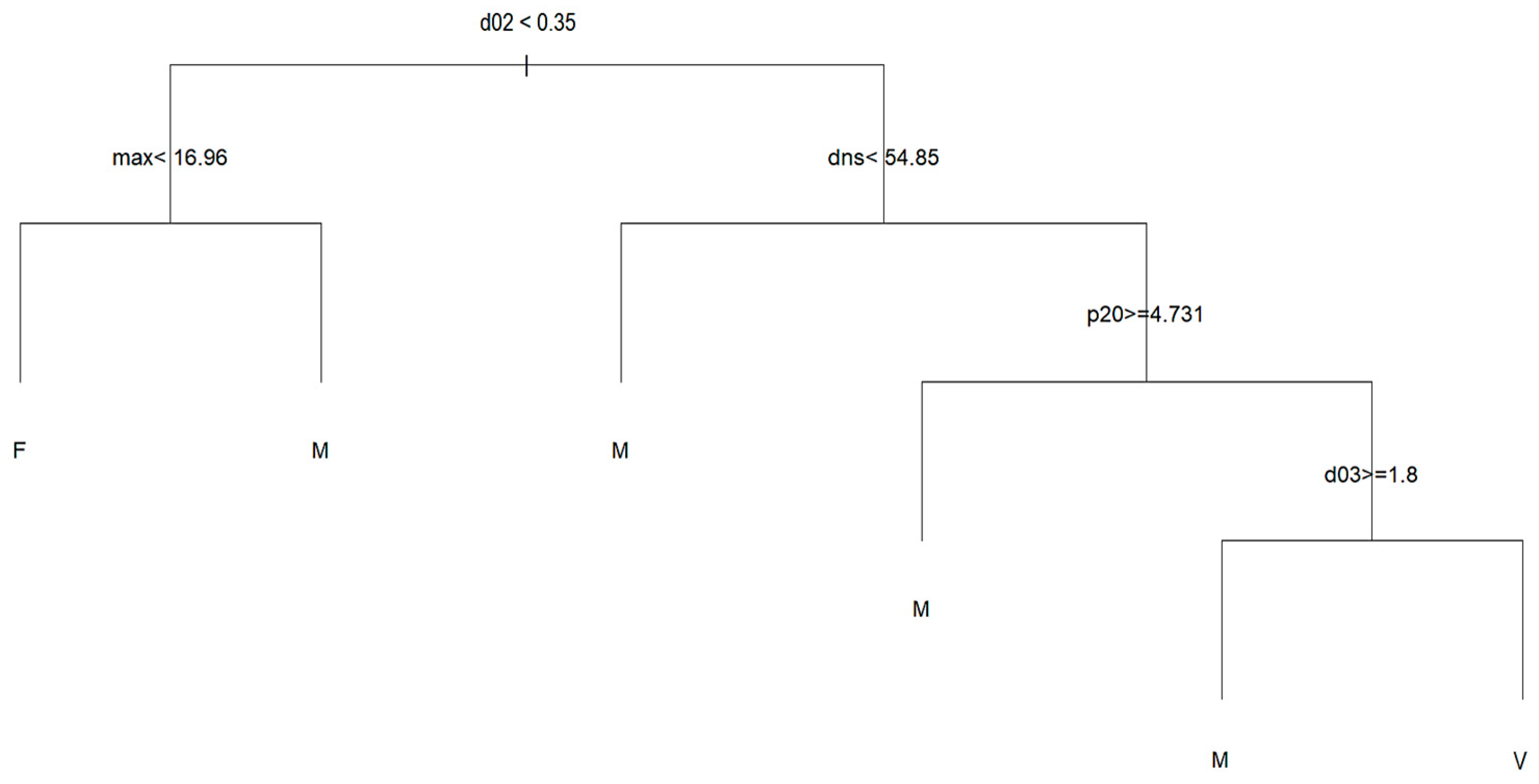
Regarding the first objective of the study, fuel model classification using CART with ALS variables only, the results indicate that understory vegetation in Portugal can be classified with moderate accuracy (
Table 7) into the D, F, M and V fuel groups, with UA values of 0.50, 0.81, 0.63 and 0.70, respectively. The most problematic fuel model group was Discontinuous fuel (D), with an estimated UA of 0.50 and a PA of 0.11. A possible reason for this is classification of the fuel based on the system used in Portugal leads to some confusion between similar fuel models, resulting in the inaccurate classification of class D. To improve accuracy, fuel model D would have to be eliminated and its fuel models distributed by the other three fuel model groups. ALS variables, particularly relative density and vertical complexity index, were found to be the most important for classifying understory fuel models. The use of CART, simple CART and RF methods in this analysis has demonstrated the importance of each method for specific applications. The RF method yielded the poorest results, with an OA of 0.60 and a kappa value of 0.34, whereas CART produced the best results in this specific application. Among the three classification approaches examined, the RF model had poor accuracy, which is consistent with the findings of previous studies with similar objectives [
62,
63]. The results confirmed the poor performance of RF, probably due to the small sample sizes for some fuel model groups. The study findings also indicated that the moderate results may be due to the limitation of the discrete ALS sensor used, which may provide more biased and less consistent measurements of forest understory structure than the full waveform ALS [
64,
65,
66]. It is possible that our results may be improved at finer scales by using drone-LiDAR or terrestrial LiDAR scanning (TLS) [
67,
68], although each method has its own limitations and cover smaller areas than ALS.
Our study used the three main canopy cover (CC) groups considered in the Portuguese NFI to analyze the effect of the number of plots per classification group of the model. A study in semi-arid conifer-dominated forests in the southwestern USA [
69] concluded that canopy cover can be used as a proxy for stand density when developing a combined individual tree distribution with area-based approaches for estimating understory. In our study, better results were obtained for Open Forest than for Dense Forest CC, with an OA of 0.75 and a kappa value of 0.57 (
Table 10). The correlation between field measurements and the ALS-derived structural characteristics of ground and understory vegetation depends on the forest type and the ALS data configuration. Such values may be different in forests with more closed canopies or sparser ALS point density [
70]. These findings highlight the importance of tree canopy cover for fuel model classification accuracy.
Even though ALS pulse density is considered an important factor in relation to understory estimation and fuel type classification, the results reveal that the models yielded better results with higher point density (10 points m
−2) than with lower point density (5 points m
−2). The best results were obtained using CART without cross validation, with 0.71 OA for 5 points m
−2 data and 0.78 for 10 points m
−2 data. Better results were obtained with a higher point density given that those values are based on almost twice the number of plots (316 plots) than with the lower point density (183 plots). We suspect that an imbalanced number of plots within the point density groups may also have hurt classification results. Previous studies produced good estimates using an even lower point density. For instance, a study that compared two sets of data with densities of 0.5 and 2 points m
−2 [
46] produced non-significant improvements with an increasing pulse density for vegetation structure estimates based on the Prometheus classification scheme. In a study using six different datasets with point densities ranging from 0.5 to 10 points m
−2 [
71], the authors found that accurate estimates of vertical canopy structure can be obtained even with a pulse density of 0.5 points m
−2 across all forest types. However, the results are not directly comparable since we are classifying understory fuel model with variables related with vertical canopy structure.
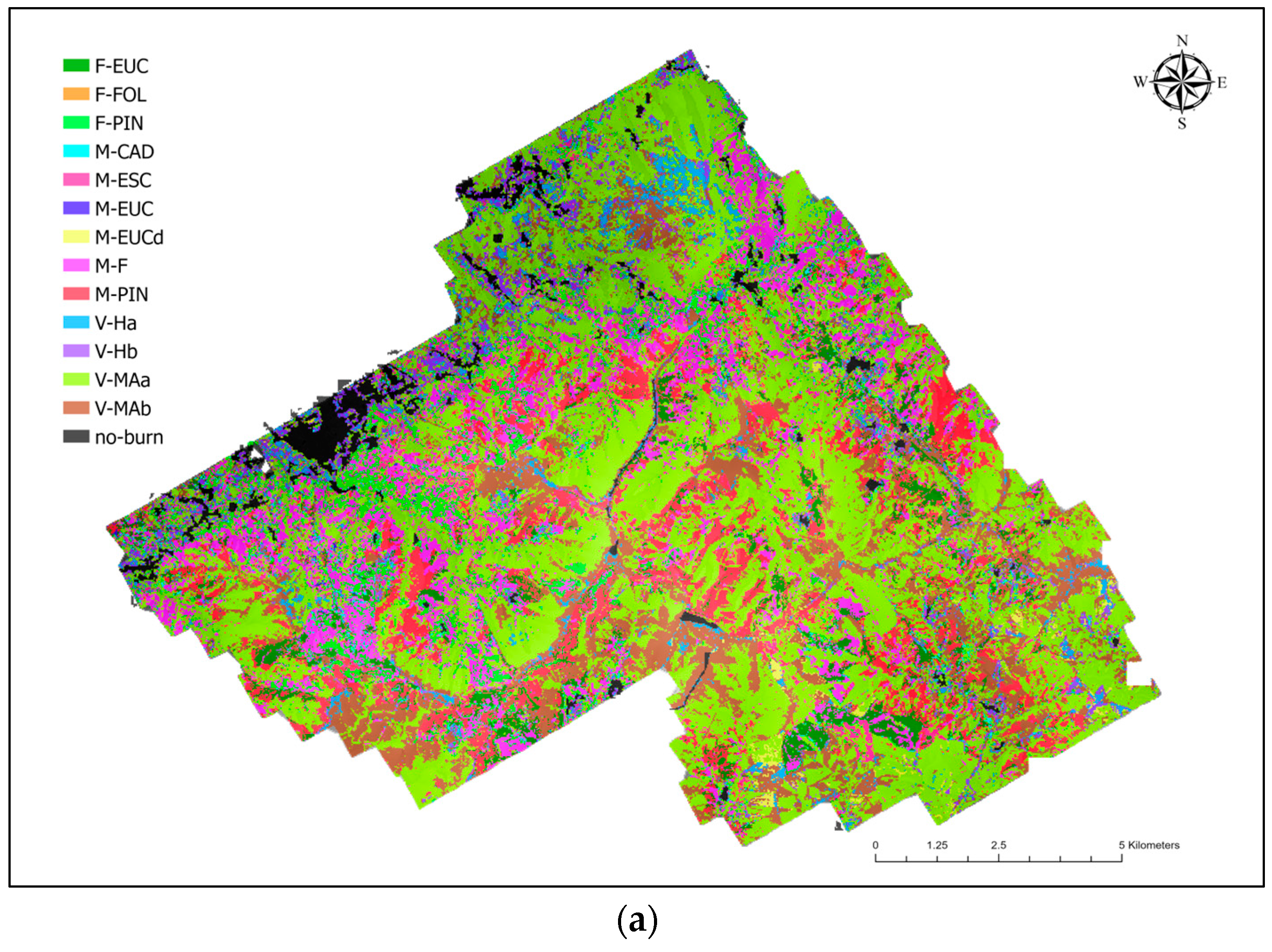
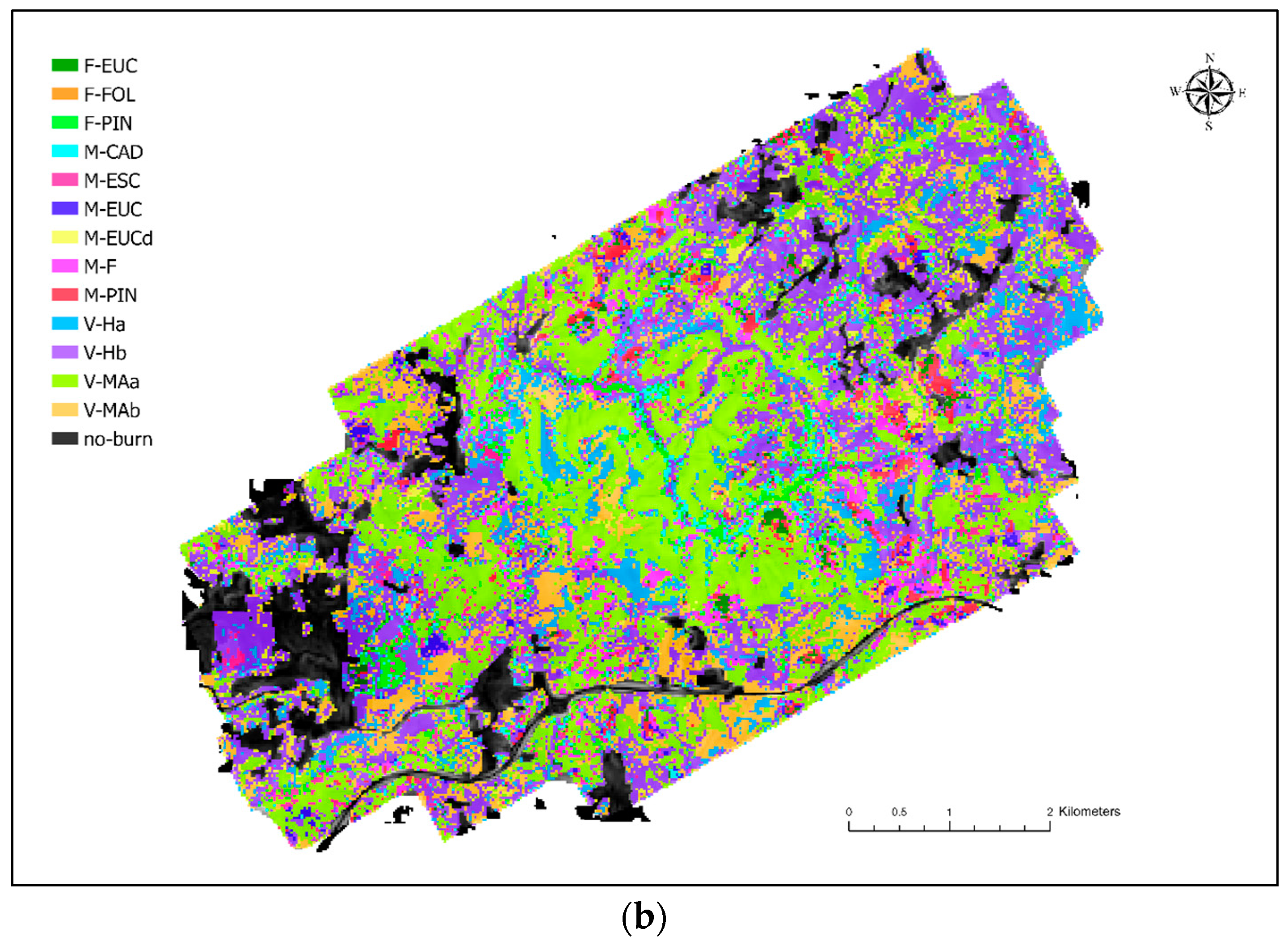
Regarding the multisensor approach, the results obtained with the RF model yielded a moderate OA of 0.44 and a kappa coefficient of 0.31 (
Table 14). The results of the present study cannot be compared directly with those of other fuel mapping studies as different methodologies were used, as was a different classification scheme specifically adapted for fuel types in Portugal. In a study combining ALS data with Landsat 9 imagery, researchers obtained an OA of 0.82 and a kappa value of 0.77 by using two different fuel classification schemes—Northern Forest Fire Laboratory (NFFL) and the specific Canary Island fuel model (CIFM) [
48]. Regarding the derived variables, our findings can be compared with those of most other studies using ALS data for fuel mapping. However, we used spectral index variables from different seasons (spring, summer, and autumn). While the four main fuel groups in Portugal were classified with reasonable accuracy, RF yielded poor results for 13 specific fuel models. The RF models performed similarly to other studies [
17], which obtained slightly better results, with an OA of 0.59 for seven fuel models based on the Prometheus classification. Therefore, better performances are expected for fewer fuel models [
17,
40], increased point density [
36], and higher-resolution Multispectral or even Hyperspectral and UAV (Unmanned Aerial Vehicle)-LiDAR imagery [
72]. Even considering the good accuracy observed in other studies using C-SAR bands [
33,
39,
73] to classify land-cover vegetation fuel models, the present findings suggest that the use of SAR variables did not improve the accuracy of the classification of fuel model types, with an OA of 0.30 and a kappa of 0.17. One of the possible reasons is the low capacity of the signal to penetrate through vegetation of L-band SAR and C-band SAR from S1 and PALSAR2. Topography and variables derived from S2 data were found to be the most important for classification, rather than L and C SAR bands. Future improvements may be obtained in order to classify fuel model types with the upcoming NASA-ISRO Synthetic Aperture RaDaR (NISAR) satellite mission in 2024 that will deliver denser L-band time series data at a higher spatial resolution of 12 m [
74].
The results of the present study could be also explained by the imbalanced fuel model observations in our study; in such cases, the model may struggle to learn patterns from the minority fuel model due to limited data, and it might end up biased towards the majority fuel models. Several authors have faced similar problems with different numbers of observations [
75,
76]. However, it is worth mentioning that most studies in the literature used fewer fuel models and plots [
17,
46,
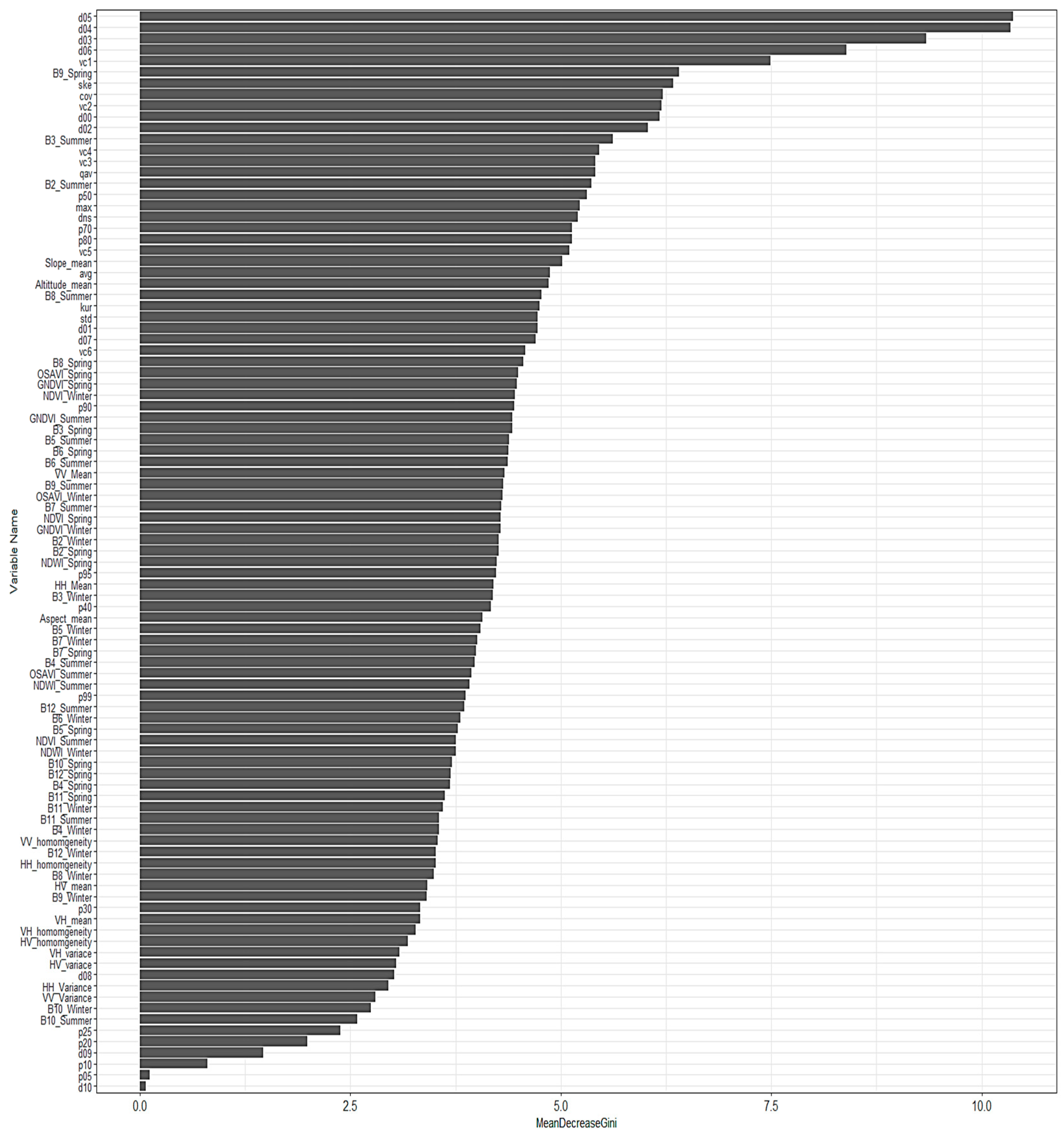
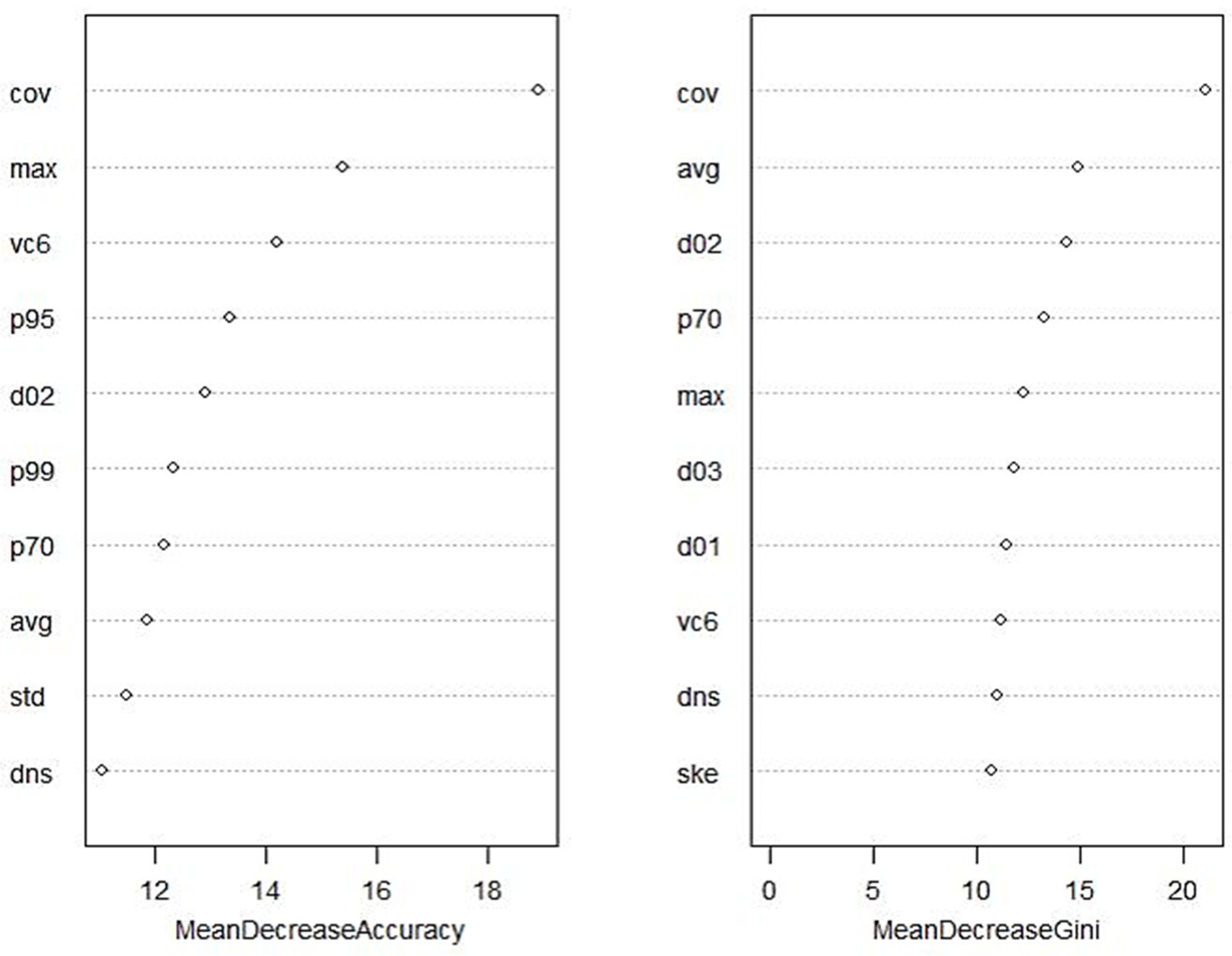
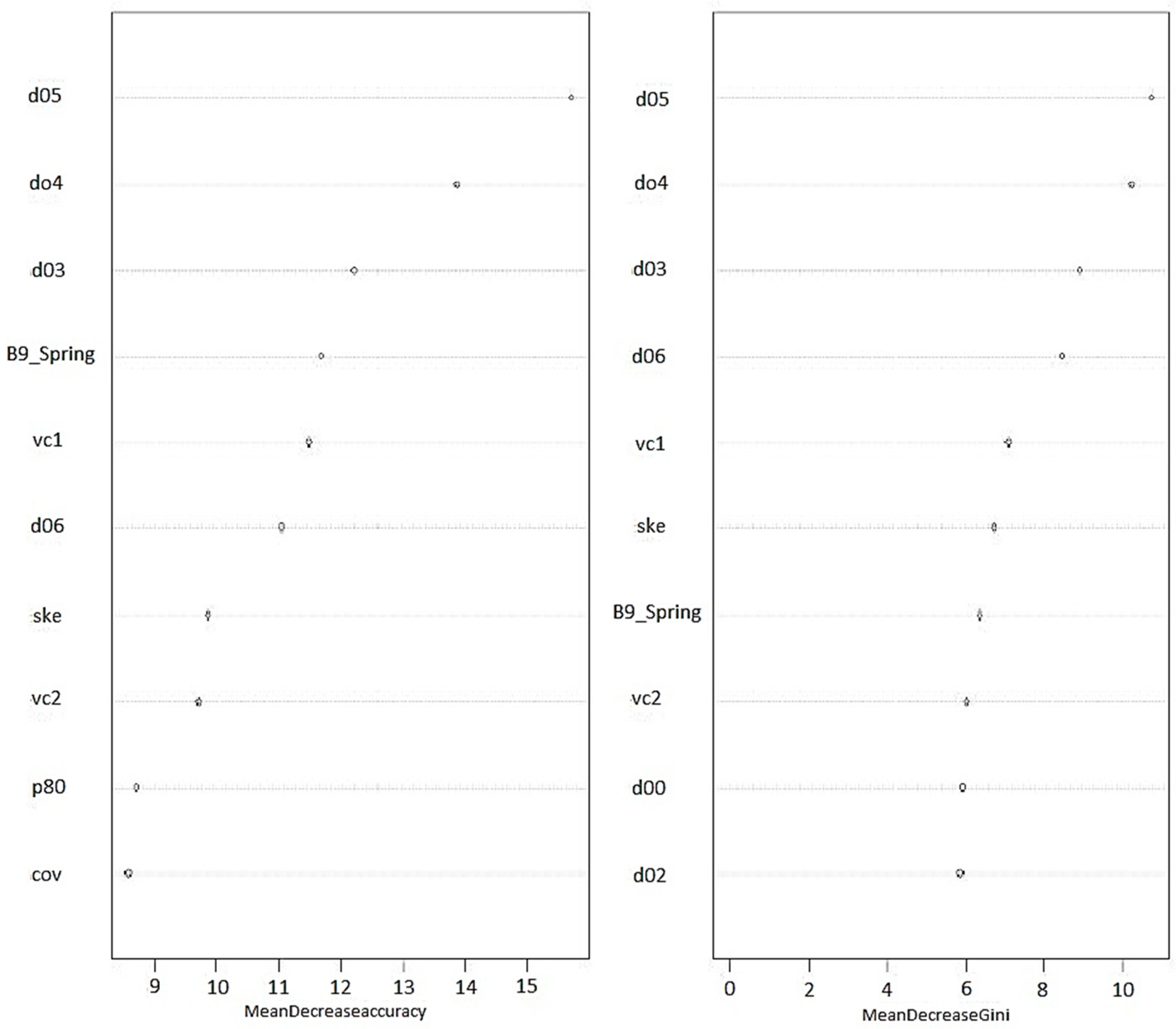
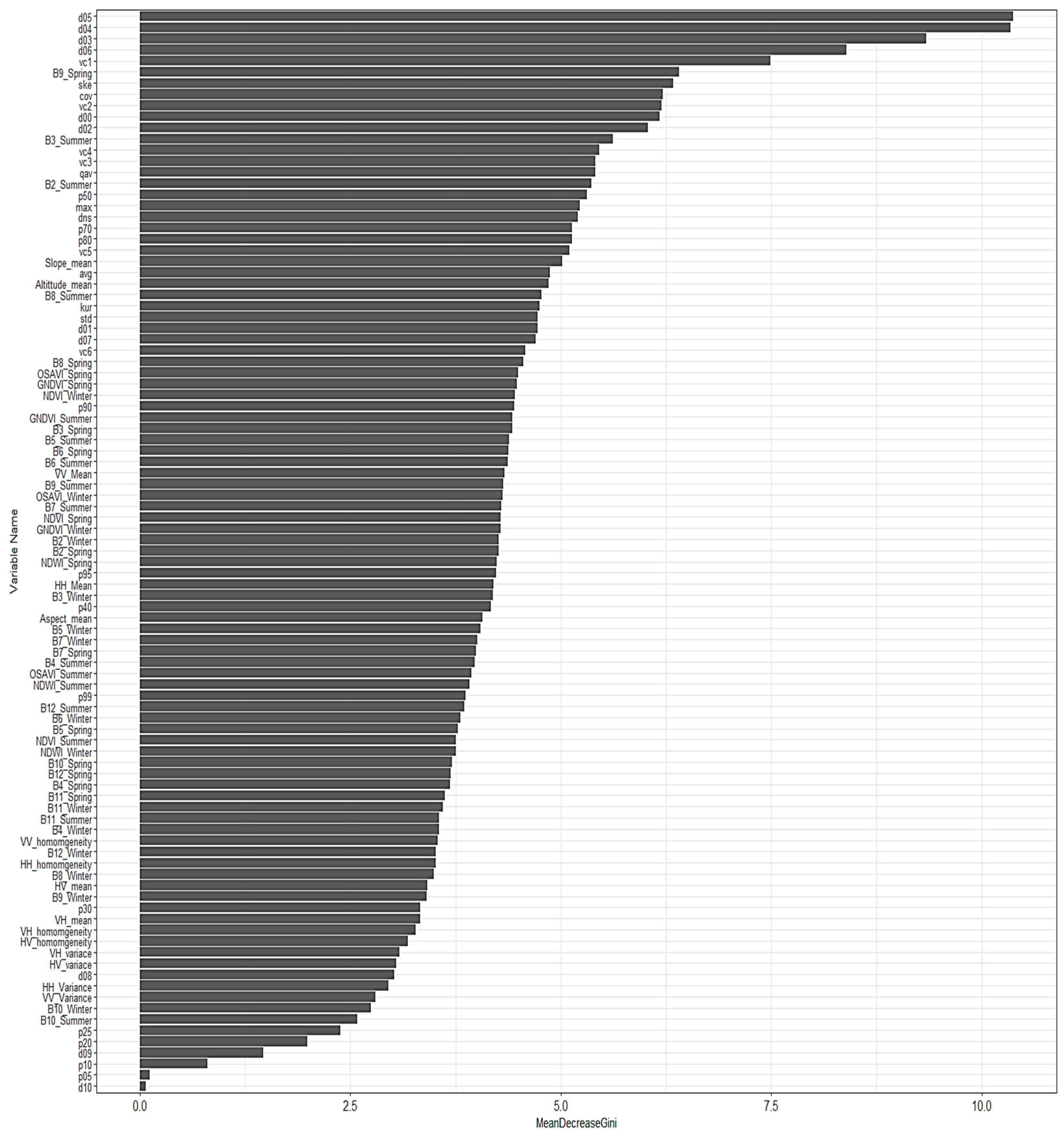
77]. For all of the metrics together (ALS + S1 + S2 + PALSAR + DEM), the results showed that the first 20 most important variables include non-texture variables from PALSAR and S1, and PALSAR variables were more important than the variables from S1 (
Figure A4,
Appendix B). Findings of similar studies suggest that the S1 satellite RaDaR images have a shorter wavelength than the ALOS/PALSAR and consequently low canopy penetration [
78]. One interesting finding is the great improvement in including ALS data with the RaDaR variables, and that this increases the OA to 0.41 and the kappa value to 0.32. In contrast to ALS variables, optical metrics and spectral indices derived from S2 do not provide information on vegetation structure, but rather, they describe the photosynthetic activity of plants [
79]. One of the possible reasons for the results obtained is that fuel models may involve different species in the same group (for example, M-CAD and M-PIN) with different spectral signals. This may be attributed to the high number of mixed forest training plots with high species heterogeneity. Regardless of these limitations, data derived from the S2 optical sensor proved to be more useful than those from ALOS/PALSAR and S1.
An important issue in terms of analysis is also the different number of variables from different seasons obtained with S2. As the results showed, summer and spring variables include spectral indices that were ranked highly in terms of importance (
Figure A4,
Appendix B). In addition to the seasonality, the confusion matrix indicated difficulties in distinguishing between litter with fern understory (M-F) and tall shrubs (V-MAa). As the M-F fuel model has a very similar plant structure to the shrubs (V-MAa), the RF model had some difficulty in identifying and distinguishing these two fuel models. Litter of intermediate to long needle pines (F-PIN) and Litter of intermediate to long needle pines and shrub under-story (M-PIN) were also similar. The model classified nine correct observations of F-PIN and predicted seven observations as M-PIN (
Table 15), although these two fuel models are similar in terms of structure in the overstory but with different understory vegetation. The most promising results were obtained to classify tall- and low-shrub fuel models (V-Ma and V-Mb). In terms of producer accuracy, V-Ma and V-Mb yielded PAs of 0.69 and 0.52, respectively. Fuel models M-F and V-Ha also yielded good PAs of 0.55 and 0.60, respectively.
Improvements in future fuel mapping studies could be made by focusing on some key points. One way would be to develop fuel models less variable in structure and composition. Improvement could also be achieved by increasing the number of plots sampled and their representativeness for each fuel model. Finally, focusing on creating a more balanced sampling design would prevent large variations in the number sample plots by fuel model under analysis.





 ,
, 


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}