Satellite Detection Limitations of Sub-Canopy Smouldering Wildfires in the North American Boreal Forest

 , , ,
, , ,
Abstract
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Materials and Methods
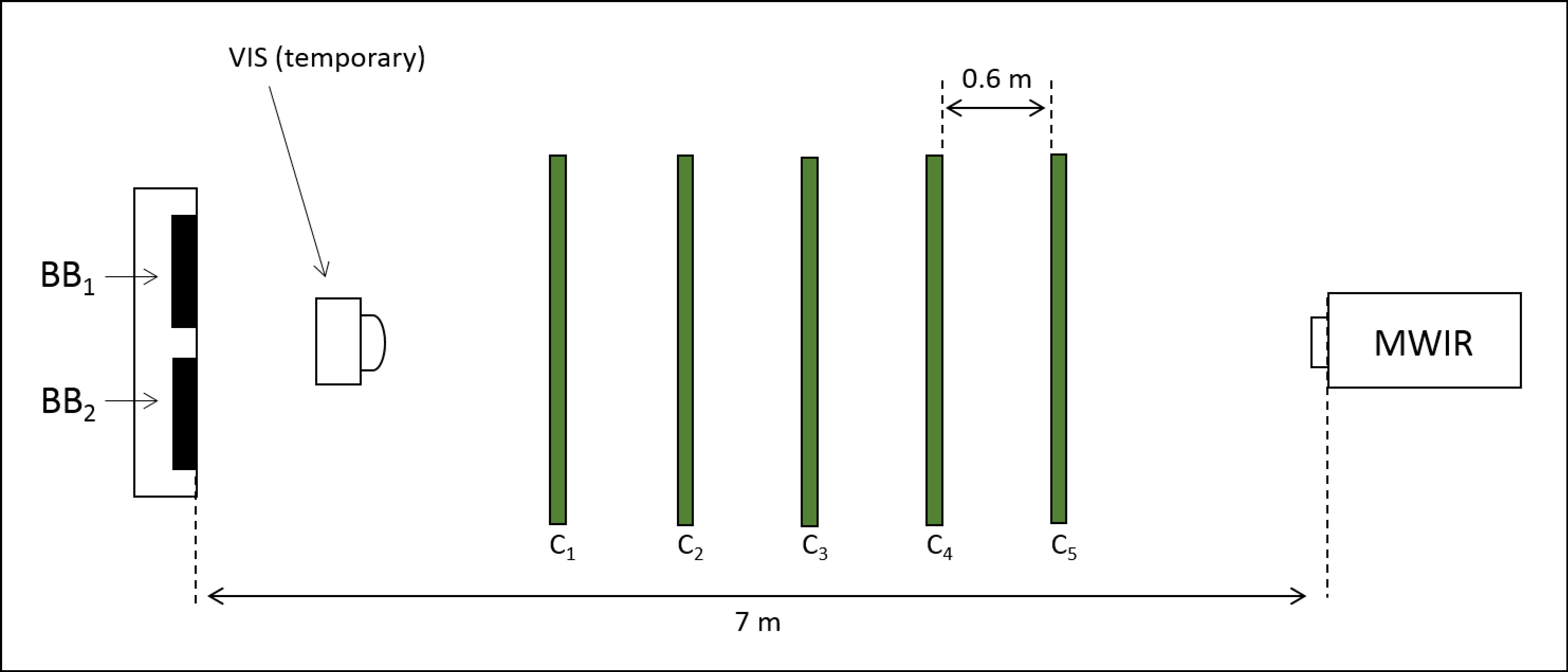
2.1. Experimental Methods
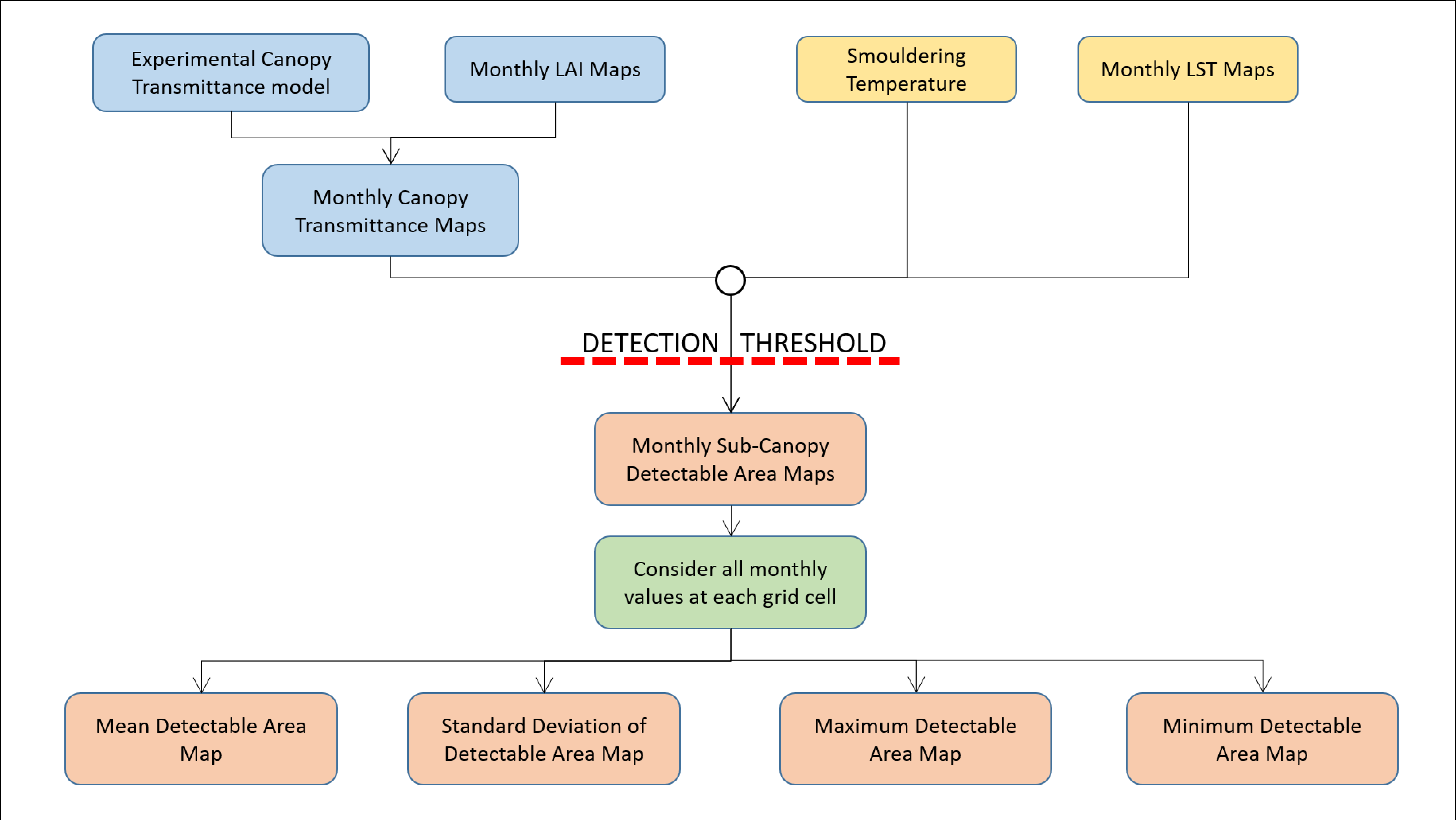
2.2. Modelling Methods
2.3. Analysis Methods
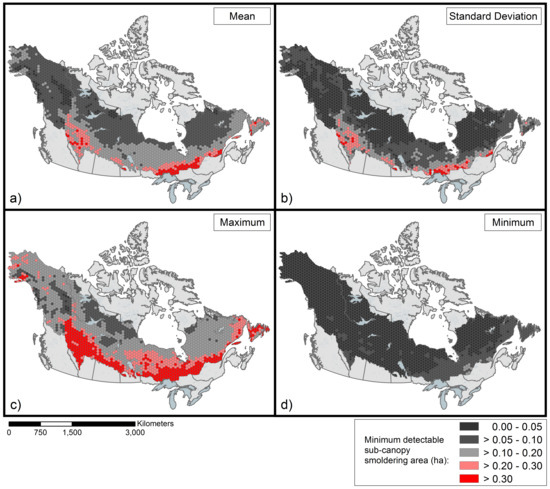
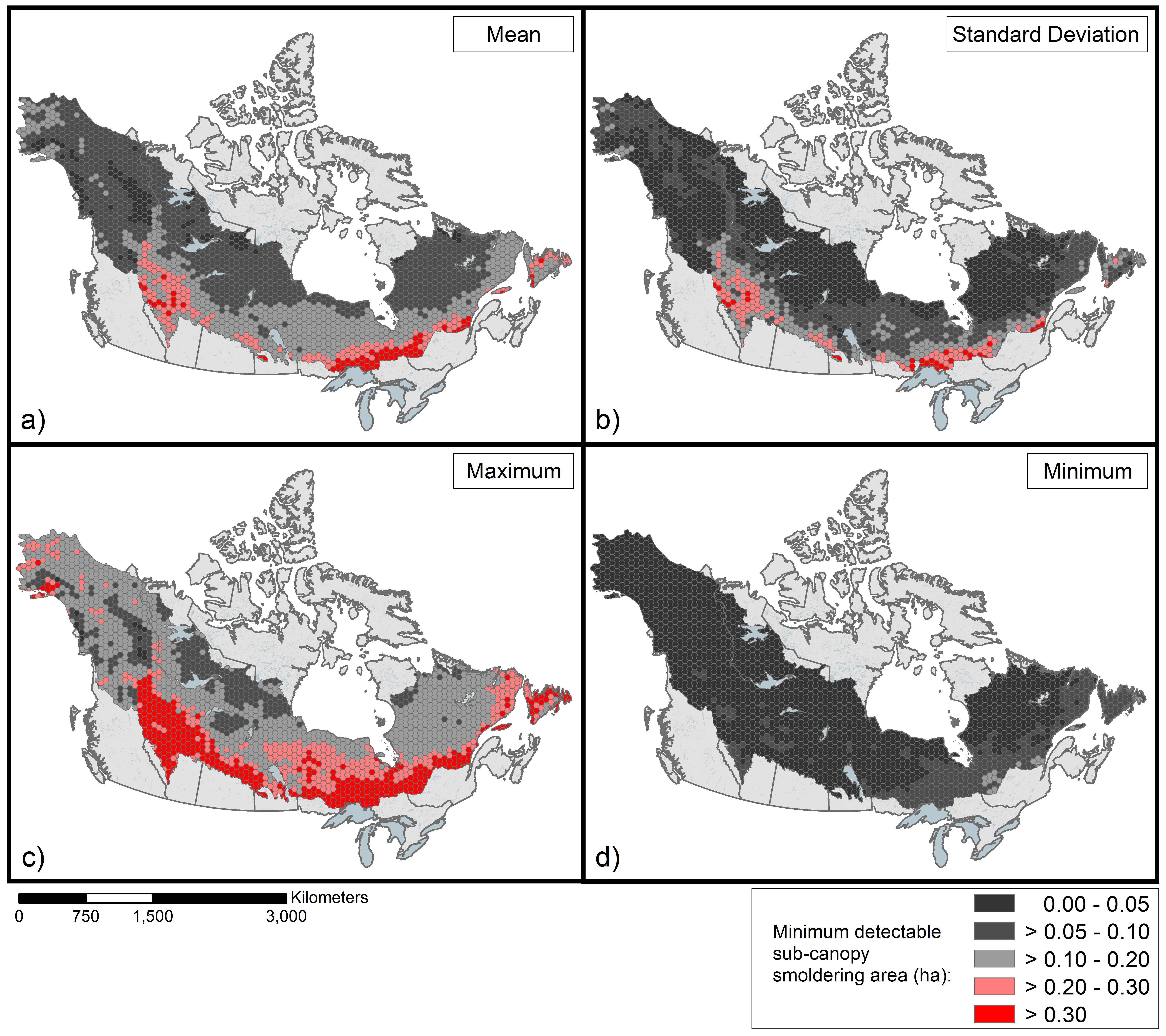
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Sparhawk, W.N. The use of liability ratings in planning forest fire protection. J. Agric. Res. 1925, 30, 693–762. [Google Scholar]
- Martell, D.L.; Sun, H. The impact of fire suppression, vegetation, and weather on the area burned by lightning-caused forest fires in Ontario. Can. J. For. Res. 2008, 38, 1547–1563. [Google Scholar] [CrossRef]
- Duff, T.J.; Tolhurst, K.G. Operational wildfire suppression modelling: A review evaluating development, state of the art and future directions. Int. J. Wildland Fire 2015, 24, 735–748. [Google Scholar] [CrossRef]
- Cumming, S.G. Effective fire suppression in boreal forests. Can. J. For. Res. 2005, 35, 772–786. [Google Scholar] [CrossRef]
- Podur, J.; Wotton, M. Will climate change overwhelm fire management capacity? Ecol. Model. 2010, 221, 1301–1309. [Google Scholar] [CrossRef]
- Houtman, R.M.; Montgomery, C.A.; Gagnon, A.R.; Calkin, D.E.; Dietterich, T.G.; McGregor, S.; Crowley, M. Allowing a wildfire to burn: Estimating the effect on future fire suppression costs. Int. J. Wildland Fire 2013, 22, 871–882. [Google Scholar] [CrossRef]
- Fox, D.; Martin, N.; Carrega, P.; Andrieu, J.; Adnès, C.; Emsellem, K.; Ganga, O.; Moebius, F.; Tortorollo, N.; Fox, E. Increases in fire risk due to warmer summer temperatures and wildland urban interface changes do not necessarily lead to more fires. Appl. Geogr. 2015, 56, 1–12. [Google Scholar] [CrossRef]
- Developing More Common Language, Terminology and Data Standards for Wildland Fire Management in Canada; Northern Forestry Centre, Canadian Forest Service, Natural Resources Canada: Edmonton, AB, Canada, 2014; p. 45.
- Bridge, S.R.J.; Miyanishi, K.; Johnson, E.A. A Critical Evaluation of Fire Suppression Effects in the Boreal Forest of Ontario. For. Sci. 2005, 51, 41–50. [Google Scholar]
- Roy, D.P.; Boschetti, L.; Justice, C.O.; Ju, J. The collection 5 modis burned area product—Global evaluation by comparison with the modis active fire product. Remote Sens. Environ. 2008, 112, 3690–3707. [Google Scholar] [CrossRef]
- Giglio, L.; Randerson, J.T.; van der Werf, G. Analysis of daily, monthly, and annual burned area using the fourth generation global fire emissions database (GFED4). J. Geophys. Res. Biogeosci. 2013, 118, 317–328. [Google Scholar] [CrossRef]
- Dragozi, E.; Gitas, I.Z.; Stavrakoudis, D.G.; Theocharis, J.B. Burned area mapping using support vector machines and the fuzcoc feature selection method on VHR IKONOS imagery. Remote Sens. 2014, 6, 12005–12036. [Google Scholar] [CrossRef]
- Flannigan, M.D.; Vonder Haar, T.H. Forest fire monitoring using NOAA satellite AVHRR. Can. J. For. Res. 1986, 16, 975–982. [Google Scholar] [CrossRef]
- Schroeder, W.; Oliva, P.; Giglio, L.; Csiszar, I.A. The new VIIRS 375 m active fire detection data product: Algorithm description and initial assessment. Remote Sens. Environ. 2014, 143, 85–96. [Google Scholar] [CrossRef]
- Giglio, L.; Schroeder, W.; Justice, C.O. The collection 6 modis active fire detection algorithm and fire products. Remote Sens. Environ. 2016, 178, 31–41. [Google Scholar] [CrossRef]
- NASA. Fire Information for Resource Management System (FIRMS). In Land, Atmosphere near Real-Time Capability for EOS (LANCE) System; NASA/GSFC/Earth Science Data and Information System (ESDIS), Funding Provided by NASA/HQ. Available online: https://earthdata.nasa.gov/earth-observation-data/near-real-time (accessed on 9 August 2018).
- Freeborn, P.H.; Wooster, M.J.; Roberts, G.; Malamud, B.D.; Xu, W. Development of a virtual active fire product for Africa through a synthesis of geostationary and polar orbiting satellite data. Remote Sens. Environ. 2009, 113, 1700–1711. [Google Scholar] [CrossRef]
- Zhang, T.; Wooster, M.J.; Xu, W. Approaches for synergistically exploiting VIIRS I-and M-Band data in regional active fire detection and FRP assessment: A demonstration with respect to agricultural residue burning in Eastern China. Remote Sens. Environ. 2017, 198, 407–424. [Google Scholar] [CrossRef]
- Flannigan, M.D.; Vonder Haar, T.H. Forest fire monitoring using the NOAA satellite series. In Proceedings of the Second Conference on Satellite Meteorology/Remote Sensing and Applications, Williamsburg, VA, USA, 13–16 May 1986; pp. 168–172. [Google Scholar]
- Mathews, B.J.; Strand, E.K.; Smith, A.M.S.; Hudak, A.T.; Dickinson, M.B.; Kremens, R.L. Laboratory experiments to estimate interception of infrared radiation by tree canopies. Int. J. Wildland Fire 2016, 25, 1009–1014. [Google Scholar] [CrossRef]
- Wooster, M.J.; Roberts, G.; Perry, G.L.W.; Kaufman, Y.J. Retrieval of biomass combustion rates and totals from fire radiative power observations: FRP derivation and calibration relationships between biomass consumption and fire radiative energy release. J. Geophys. Res. Atmos. 2005, 110. [Google Scholar] [CrossRef]
- Wooster, M.J.; Zhukov, B.; Oertel, D. Fire radiative energy for quantitative study of biomass burning: Derivation from the BIRD experimental satellite and comparison to MODIS fire products. Remote Sens. Environ. 2003, 86, 83–107. [Google Scholar] [CrossRef]
- Ichoku, C.; Ellison, L. Global top-down smoke-aerosol emissions estimation using satellite fire radiative power measurements. Atmos. Chem. Phys. 2014, 14, 6643–6667. [Google Scholar] [CrossRef]
- Mota, B.; Wooster, M.J. A new top-down approach for directly estimating biomass burning emissions and fuel consumption rates and totals from geostationary satellite fire radiative power (FRP). Remote Sens. Environ. 2018, 206, 45–62. [Google Scholar] [CrossRef]
- Breshears, D.D.; Rich, P.M.; Barnes, F.J.; Campbell, K. Overstory-Imposed Heterogeneity in Solar Radiation and Soil Moisture in a Semiarid Woodland. Ecol. Appl. 1997, 7, 1201–1215. [Google Scholar] [CrossRef]
- Ball, R.A.; Purcell, L.C.; Carey, S.K. Evaluation of Solar Radiation Prediction Models in North America. Agron. J. 2004, 96, 391–397. [Google Scholar] [CrossRef]
- Bewley, D.; Pomery, J.W.; Essery, R.L.H. Solar Radiation Transfer through a Subarctic Shrub Canopy. Arct. Antarct. Alp. Res. 2007, 39, 365–374. [Google Scholar] [CrossRef]
- Johnston, J.M.; Wooster, M.J.; Lynham, T.J. Experimental Confirmation of the MWIR and LWIR Greybody Hypothesis for Vegetation Fire Flame Emissivity. Int. J. Wildland Fire 2014, 23, 463–479. [Google Scholar] [CrossRef]
- Ohlemiller, T.J. Smoldering combustion: Sections 2–11. In SFPE Handbook of Fire Protection Engineering, 2nd ed.; National Fire Protection Association, Society of Fire Protection Engineers: Quincy, MA, USA, 1995. [Google Scholar]
- Van Wagner, C. Christmas trees like water. In Fire Fighting in Canada; 1962; p. 16. [Google Scholar]
- Chen, J.M.; Pavlic, G.; Brown, L.; Cihlar, J.; Leblanc, S.G.; White, H.P.; Hall, R.J.; Peddle, D.R.; King, D.J.; Trofymow, J.A.; et al. Derivation and validation of Canada-wide coarse-resolution leaf area index maps using high-resolution satellite imagery and ground measurements. Remote Sens. Environ. 2002, 80, 165–184. [Google Scholar] [CrossRef]
- Chen, J.M.; Black, T.A. Measuring leaf area index of plant canopies with branch architecture. Agric. For. Meteorol. 1991, 57, 1–12. [Google Scholar] [CrossRef]
- Zheng, G.; Moskal, L.M. Retrieving leaf area index (LAI) using remote sensing: Theories, methods and sensors. Sensors 2009, 9, 2719–2745. [Google Scholar] [CrossRef] [PubMed]
- Black, T.A.; Chen, J.-M.; Lee, X.; Sagar, R.M. Characteristics of shortwave and longwave irradiances under a Douglas-fir forest stand. Can. J. For. Res. 1991, 21, 1020–1028. [Google Scholar] [CrossRef]
- Frazer, G.W.; Canham, C.D.; Lertzman, K.P. Gap Light Analyzer (GLA), Version 2.0: Imaging Software to Extract Canopy Structure and Gap Light Transmission Indices from True-Colour Fisheye Photographs, Users’ Manual and Program Documentation; Simon Fraser University: Burnaby, BC, Canada; Institute of Ecosystem Studies: Millbrook, NY, USA, 1999. [Google Scholar]
- FAO. Global Ecofloristic Zones Mapped by the United Nations Food and Agricultural Organization. FAO, Adapted by Aaron Ruesch and Holly K. Gibbs. 2008. Available online: https://databasin.org/datasets/dc4f6efd1fa84ea99df61ae9c5b3b763. 2000 (accessed on 9 August 2018).
- Jenness, J. Repeating Shapes for ArcGIS; Jenness Enterprises: Flagstaff, AZ, USA, 2012; Available online: http://www.jennessent.com/arcgis/repeat_shapes.htm (accessed on 9 August 2018).
- Giglio, L.; Descloitres, J.; Justice, C.O.; Kaufman, Y.J. An Enhanced Contextual Fire Detection Algorithm for MODIS. Remote Sens. Environ. 2003, 87, 273–282. [Google Scholar] [CrossRef]
- Wooster, M.J.; Xu, W.; Nightingale, T. Sentinel-3 SLSTR active fire detection and FRP product: Pre-launch algorithm development and performance evaluation using MODIS and ASTER datasets. Remote Sens. Environ. 2012, 120, 236–254. [Google Scholar] [CrossRef]
- Wotton, B.; Gould, J.; McCaw, W.; Cheney, N.; Taylor, S. Flame temperature and residence time of fires in dry eucalypt forest. Int. J. Wildland Fire 2012, 21, 270–281. [Google Scholar] [CrossRef]
- Kremens, R.; Faulring, J.; Hardy, C. Measurement of the time–temperature and emissivity history of the burn scar for remote sensing applications. In Proceedings of the 5th Symposium on Fire and Forest Meteorology and the 2nd International Wildland Fire Ecology and Fire Management Congress, American Meteorological Society, Orlando, FL, USA, 16–20 November 2003. [Google Scholar]
- Dozier, J. A method for satellite identification of surface temperature fields of subpixel resolution. Remote Sens. Environ. 1981, 11, 221–229. [Google Scholar] [CrossRef]
- Wan, Z.; Hook, S.; Hulley, G. MOD11B3 MODIS/Terra Land Surface Temperature/Emissivity Monthly L3 Global 6 km SIN Grid V006, [Data set]. NASA EOSDIS LP DAAC 2015. [Google Scholar] [CrossRef]
- Canadian Forest Service. Canadian National Fire Database—Agency Fire Data. Dataset; Natural Resources Canada/Canadian Forest Service/Northern Forestry Centre: Edmonton, AB, Canada, 2017. Available online: http://cwfis.cfs.nrcan.gc.ca/ha/nfdb (accessed on 9 August 2018).
- Johnston, L.M.; Flannigan, M.D. Mapping Canadian wildland fire interface areas. Int. J. Wildland Fire 2018, 27, 1–14. [Google Scholar] [CrossRef]
- Wotton, B.M.; Flannigan, M.D.; Marshall, G.A. Potential climate change impacts on fire intensity and wildfire suppression thresholds in Canada. Environ. Res. Lett. 2017, 12, 095003. [Google Scholar] [CrossRef]
- Martell, D.L. Forest Fire Management. In Forest Fires; Academic Press: New York, NY, USA, 2001; pp. 527–583. [Google Scholar]
- Morin, A.A.; Albert-Green, A.; Woolford, D.G.; Martell, D.L. The use of survival analysis methods to model the control time of forest fires in Ontario, Canada. Int. J. Wildland Fire 2015, 24, 964–973. [Google Scholar] [CrossRef]
- Hellström, R.Å. Forest cover algorithms for estimating meteorological forcing in a numerical snow model. Hydrol. Process. 2000, 14, 3239–3256. [Google Scholar] [CrossRef]
- Freeborn, P.; Wooster, M.J.; Roberts, G. Addressing the spatiotemporal sampling design of MODIS to provide estimates of the fire radiative energy emitted from Africa. Remote Sens. Environ. 2011, 115, 475–489. [Google Scholar] [CrossRef]
- Wolfe, R.E.; Lin, G.; Nishihama, M.; Tewari, K.P.; Tilton, J.C.; Isaacman, A.R. Suomi NPP VIIRS prelaunch and on-orbit geometric calibration and characterization. J. Geophys. Res. Atmos. 2013, 118, 11508–11521. [Google Scholar] [CrossRef]











© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Johnston, J.M.; Johnston, L.M.; Wooster, M.J.; Brookes, A.; McFayden, C.; Cantin, A.S. Satellite Detection Limitations of Sub-Canopy Smouldering Wildfires in the North American Boreal Forest. Fire 2018, 1, 28. https://doi.org/10.3390/fire1020028
Johnston JM, Johnston LM, Wooster MJ, Brookes A, McFayden C, Cantin AS. Satellite Detection Limitations of Sub-Canopy Smouldering Wildfires in the North American Boreal Forest. Fire. 2018; 1(2):28. https://doi.org/10.3390/fire1020028
Chicago/Turabian StyleJohnston, Joshua M., Lynn M. Johnston, Martin J. Wooster, Alison Brookes, Colin McFayden, and Alan S. Cantin. 2018. "Satellite Detection Limitations of Sub-Canopy Smouldering Wildfires in the North American Boreal Forest" Fire 1, no. 2: 28. https://doi.org/10.3390/fire1020028
APA StyleJohnston, J. M., Johnston, L. M., Wooster, M. J., Brookes, A., McFayden, C., & Cantin, A. S. (2018). Satellite Detection Limitations of Sub-Canopy Smouldering Wildfires in the North American Boreal Forest. Fire, 1(2), 28. https://doi.org/10.3390/fire1020028