Accelerometers in Monitoring Systems for Rail Vehicle Applications: A Literature Review

 ,
,  ,
,
Abstract
1. Introduction
1.1. Acceleration Sensors
1.2. Working Principle of Accelerometer
1.3. Types of Accelerometers
1.3.1. Machined Piezoelectric Resistive
- This system has a very wide dynamic range and produces almost no noise. It is suitable for measuring shocks and can also detect vibrations that are barely noticeable;
- This system has the best linearity in the dynamic range;
- This system has a side frequency range—very high frequencies can be measured;
- This system is compact and sensitive;
- This system has no moving parts (reliable);
- This system has no need for an external supply;
- This system has different models available;
- This system has speed and displacement that can be computed using output data.
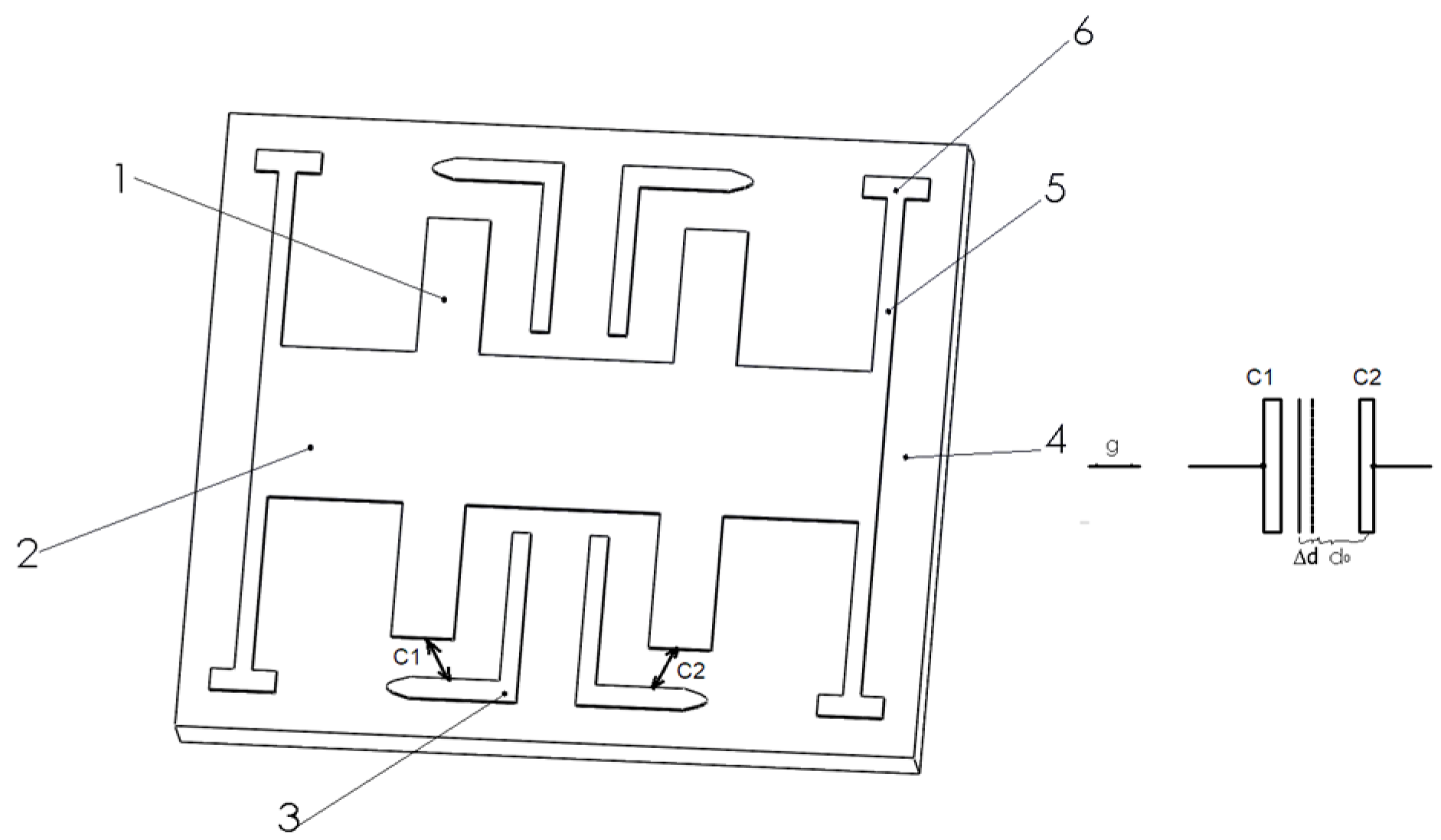
1.3.2. Capacitive Spring-Mass System Base
1.3.3. Laser Accelerometer
1.3.4. Magnetic Induction
1.3.5. Optical
1.3.6. Surface Acoustic Wave (SAW)
1.4. Particular Types of Accelerometers
1.4.1. Seat Pad Accelerometers
1.4.2. Shear Mode Accelerometer
1.4.3. Strain Gauge Accelerometer
1.4.4. Surface Micromachined Capacitive Accelerometer (MEMS)
1.4.5. LVDT-Type Accelerometer
1.5. The Applications of Accelerometers Used in the Industry
1.5.1. Vehicle Engineering
1.5.2. Machinery Industry
1.5.3. Building and Structural Monitoring
1.5.4. Navigation
1.5.5. Handheld Products
1.5.6. Image Stabilization
2. Fundamentals of Accelerometer Data
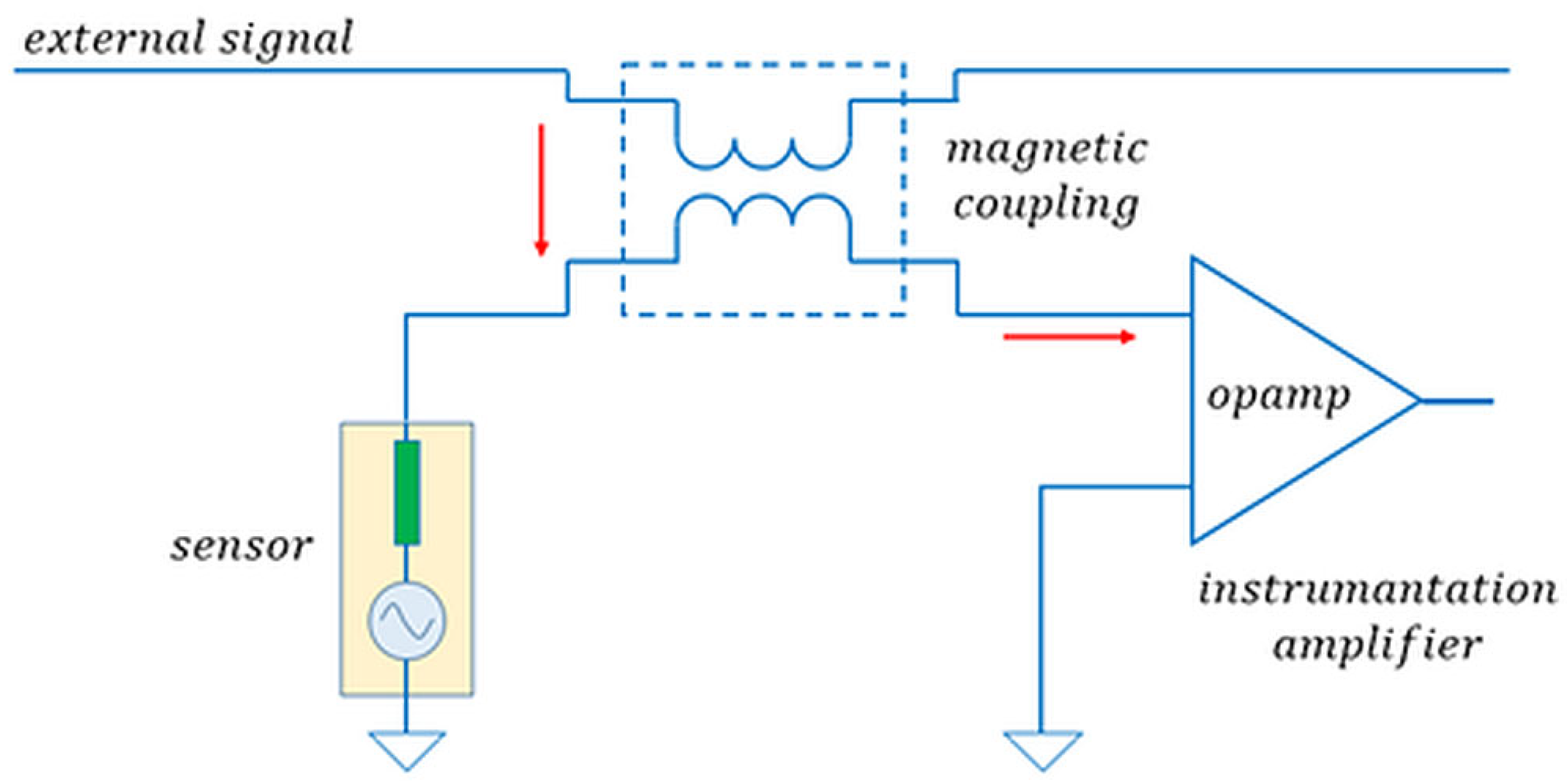
2.1. Output Interface
- Pulse-Width Modulation (PWM) output square waves with a fixed period and a variable duty cycle, as presented by Equation (5).

2.2. Noise and Artefacts
- Internal noise;
- External noise.
2.3. Calibration and Validation
3. Signal-Processing Techniques
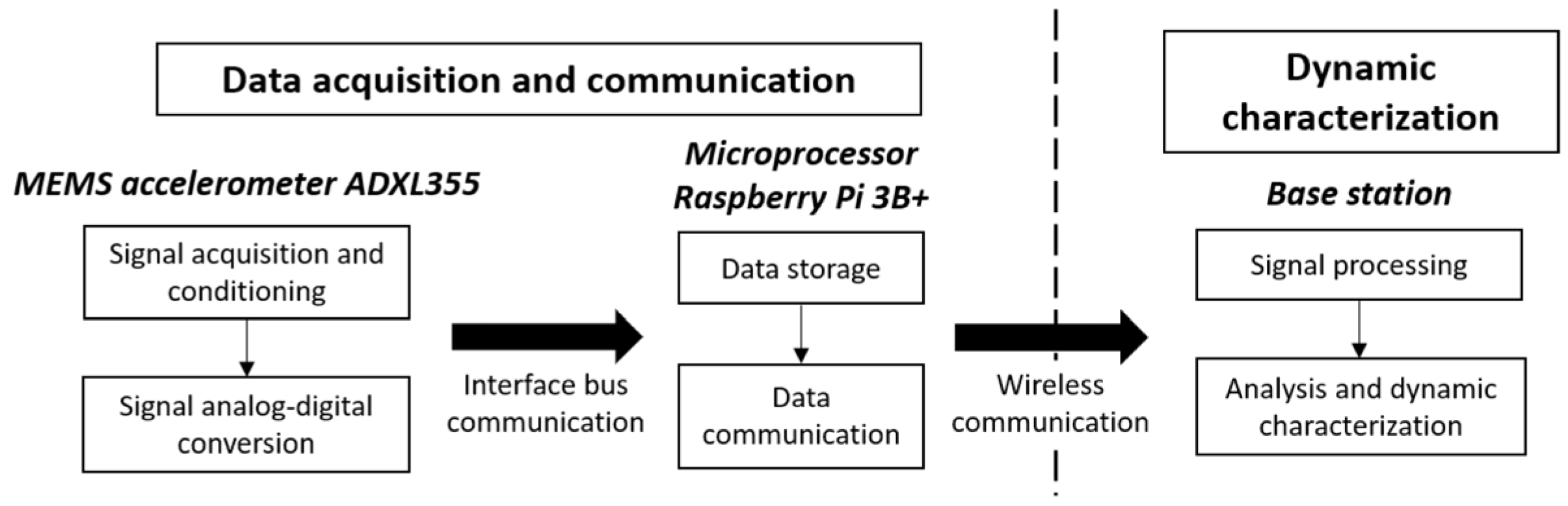
3.1. Online Data Acquisition
3.2. Accelerometer Data Preprocessing
3.3. Time-Domain and Frequency-Domain Analysis
- The zero-crossing rate is a simple, cost-effective way to compare patterns in two sets of time-series measurements. It is a feature that is useful in analyzing noise corruption.
- Correlation coefficients are a useful tool to check if two time-series readings are similar;
- Cross correlations functionto measure the extent of the offset between two time-series measurements;
- The signal’s RMS and peak-to-peak values are used to set alarms on specific thresholds based on the application’s particular needs.
- Maxima and energy are used to compare dominant frequencies in measurements, while the spectral energy of sensor readings reflects their spectral structure.
- The correlation coefficients for both FFT and STFT are useful for examining how frequencies shift over time, serving as an important measure of correlation;
- Spectral roll-off is a feature that looks at the frequency. It only considers the Fourier transformation of acceleration vectors;
- The spectral centroid shows the average location of the “center of gravity” of a vibration’s spectrum. It is similar to the “first n-maxima” and helps us to understand where the main energy of the vibration is located;
- Spectral flux measures the rate of change in the power spectrum.
3.4. Wavelet Transform
4. Examples of Accelerometers Used in Rail Vehicle Systems
- feature extraction using an autoregressive method;
- feature normalization;
- data fusion;
- damage detection.
5. Guide for Choosing a Correct Accelerometer
5.1. Technology
- Piezoelectric accelerometers are useful tools for measuring shocks and vibrations. They can detect a wide range of frequencies, from very low (a few times per second) to quite high (up to 30,000 times per second). This makes them great for capturing different types of movements and impacts.
- Piezoresistive accelerometers are sensitive devices that measure changes in movement. They are particularly good for detecting sudden shocks and can effectively monitor changes over long periods of time. These accelerometers can capture a wide range of motion, but their ability to detect very low frequencies, including steady situations, diminishes over time.
- Variable capacitance accelerometers, also known as VC or MEMS accelerometers, are a type of technology used to measure movement and vibrations. They are known for being very sensitive, which allows them to detect subtle changes, and they perform well even when temperatures vary. This makes them ideal for monitoring slow movements and steady changes in acceleration.
5.2. Sensitivity and Resolution
5.3. Standards Applicable in the Field of Rail Vehicle Monitoring
6. Conclusions
7. Future Directions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Denishev, K.H.; Petrova, M.R. Accelerometer design. In Proceedings of the ELECTRONICS’ 2007, Sozopol, Bulgaria, 19–21 September 2007. [Google Scholar]
- Eren, H. Acceleration, Vibration, and Shock Measurement. In The Measurement, Instrumentation, and Sensors Handbook—Spatial, Mechanical, Thermal, and Radiation Measurement; CRC Press: Boca Raton, FL, USA, January 2014. [Google Scholar]
- Serridge, M.; Licht, T. Piezoelectric Accelerometers and Vibration Preamplifiers: Theory and Application Handbook; Brüel & Kjær: Nærum, Denmark, 1986; 151p. [Google Scholar]
- Wagner, J.; Burgemeister, J. Piezoelectric Accelerometers: Theory and Application, 7th ed.; Manfred Weber Metra Mess- und Frequenztechnik in Radebeul e.K.: Radebeul, Germany, 2021. [Google Scholar]
- Constantinescu, F.; Gheorghe, A.; Nitescu, M. A Capacitive Accelerometer Model. Rev. Roum. Sci. Tech.—Ser. Électrotech. Énerg. 2013, 58, 163–172. [Google Scholar]
- Voldman, J. Design and Fabrication of Microelectromechanical Devices; Course Materials for 6.777J/2.372J; MIT OpenCourseWare. 2007. Available online: http://ocw.mit.edu/ (accessed on 10 April 2025).
- Mahdavi, N.; Suske, M. Inertial Grade Laser Accelerometer–Practicability and Basic Experiments. In Proceedings of the XVII IMEKO World Congress, Dubrovnik, Croatia, 22–27 June 2003. [Google Scholar]
- Qian, L.; Li, D. Use of Magnetic Fluid in Accelerometers. J. Sens. 2014, 2014, 375623. [Google Scholar] [CrossRef]
- Ju, D.-Y.; Tabata, K. Development and Optimization of Design of an Acceleration Sensor Using Ferrofluid. Sens. Mater. 2008, 20, 409–416. [Google Scholar]
- Lopez-Hignera, J.-M.; Morante, M.A.; Cobo, A. Simple low-frequency optical fiber accelerometer with large rotating machine monitoring applications. J. Light. Technol. 1997, 15, 1120–1130. [Google Scholar] [CrossRef]
- Casas-Ramos, M.A.; Castillo-Barrera, L.G.; Sandoval-Romero, G.E. Optical accelerometer for seismic measurement. Vibroeng. Procedia 2018, 21, 38–41. [Google Scholar] [CrossRef]
- Baldwin, C.S.; Niemczuk, J.B.; Kiddy, J.S.; Salter, T.J. Review of Fiber Optic Accelerometers. Available online: https://api.semanticscholar.org/CorpusID:180260894 (accessed on 10 April 2025).
- Shevchenko, S.; Kukaev, A.; Khivrich, M.; Lukyanov, D. Surface-Acoustic-Wave Sensor Design for Acceleration Measurement. Sensors 2018, 18, 2301. [Google Scholar] [CrossRef]
- Coyte, J.L.; Stirling, D.; Du, H.; Ros, M. Seated Whole-Body Vibration Analysis, Technologies, and Modeling: A Survey. IEEE Trans. Syst. Man Cybern. Syst. 2016, 46, 725–739. [Google Scholar] [CrossRef]
- Prakash, A.; Rajamohan, V.; Sudhagar, E. Design and Analysis of a Shear Mode IEPE Accelerometer. Int. J. Pure Appl. Math. 2018, 118, 4157–4164. [Google Scholar]
- National Instruments. Strain Gauge Measurement—A Tutorial, Application Note 078. August 1998. Available online: http://elektron.pol.lublin.pl/elekp/ap_notes/ni_an078_strain_gauge_meas.pdf (accessed on 11 March 2025).
- Salzano, C. Dynamic Strain Sensors and Accelerometers for Structural Testing: Cases of Measurements on a Civil Structure and on the GVT of an F-16 Aircraft. In IOMAC 2024; Lecture Notes in Civil Engineering; Springer: Cham, Switzerland, 2024; Volume 514. [Google Scholar] [CrossRef]
- Jérôme Laine, J.; Mougenot, D. A high-sensitivity MEMS-based accelerometer. Lead. Edge 2014, 33, 1210–1308. [Google Scholar] [CrossRef]
- Srokosz, P.E.; Daniszewska, E.; Banach, J.; Śmieja, M. In-Depth Analysis of Low-Cost Micro Electromechanical System (MEMS) Accelerometers in the Context of Low Frequencies and Vibration Amplitudes. Sensors 2024, 24, 6877. [Google Scholar] [CrossRef]
- Büsching, F.; Kulau, U.; Gietzelt, M.; Wolf, L. Comparison and validation of capacitive accelerometers for health care applications. Comput. Methods Programs Biomed. 2012, 106, 79–88. [Google Scholar] [CrossRef] [PubMed]
- Bouten, C.V.C.; Koekkoek, K.T.M.; Verduin, M.; Kodde, R.; Janssen, J.D. A triaxial accelerometer and portable data processing unit for the assessment of daily physical activity. IEEE Trans. Biomed. Eng. 1997, 44, 136–147. [Google Scholar] [CrossRef] [PubMed]
- Joshi, S.; Harle, S.M. Linear Variable Differential Transducer (LVDT) & Its Applications in Civil Engineering. Int. J. Transp. Eng. Technol. 2017, 3, 62–66. [Google Scholar] [CrossRef]
- Ahmed, H.E.; Sahandabadi, S.; Bhawya; Ahamed, M.J. Application of MEMS Accelerometers in Dynamic Vibration Monitoring of a Vehicle. Micromachines 2023, 14, 923. [Google Scholar] [CrossRef]
- Jiménez, S.; Cole, M.O.T.; Keogh, P.S. Vibration sensing in smart machine rotors using internal MEMS accelerometers. J. Sound Vib. 2016, 377, 58–75. [Google Scholar] [CrossRef]
- Suwandi, B.; Kitasuka, T.; Aritsugi, M. Vehicle Vibration Error Compensation on IMU-accelerometer Sensor Using Adaptive Filter and Low-pass Filter Approaches. J. Inf. Process. 2019, 27, 33–40. [Google Scholar] [CrossRef]
- Olaru, R.; Ghercă, R.; Petrescu, C. Analysis and Design of A Vibration Energy Harvester Using Permanent Magnets. Rev. Roum. Sci. Tech.—Électrotech. Énerg. 2014, 59, 131–140. [Google Scholar]
- Chen, X.; Ma, L.; Zhang, L.; Zhang, C. Vibration and Noise Optimization of Rotor Structure of Permanent Magnet Synchronous Motor for Vehicles. Electroteh. Electron. Autom. (EEA) 2023, 71, 1–9. [Google Scholar] [CrossRef]
- Baek, S.; Yoon, H.S.; Kim, D.Y. Abnormal vibration detection in the bearing-shaft system via semi-supervised classification of accelerometer signal patterns. Procedia Manuf. 2020, 51, 316–323. [Google Scholar] [CrossRef]
- Georgoulas, G.; Karvelis, P.; Loutas, T.; Stylios, C.D. Rolling element bearings diagnostics using the Symbolic Aggregate approXimation. Mech. Syst. Signal Process. 2015, 60–61, 229–242. [Google Scholar] [CrossRef]
- Chen, L.; Wei, L.; Wang, Y.; Wang, J.; Li, W. Monitoring and Predictive Maintenance of Centrifugal Pumps Based on Smart, Sensors. Sensors 2022, 22, 2106. [Google Scholar] [CrossRef] [PubMed]
- Săvescu, C.; Petrescu, V.; Comeagă, D.; Vlăducă, I.; Nechifor, C.; Niculescu, F. Vibration Analysis of a Twin-Screw Compressor as a Potential Source for Piezoelectric Energy Harvesting. Rev. Roum. Sci. Tech.—Électrotech. Énerg. 2023, 68, 253–258. [Google Scholar] [CrossRef]
- Ben Rahmoune, M.; Iratni, A.; Hafaifa, A.; Colak, I. Gas Turbine Vibrations Detection and Identification based on Dynamic Artificial Neural Networks. Electroteh. Electron. Autom. (EEA) 2023, 71, 19–27. [Google Scholar] [CrossRef]
- López-Castro, B.; Haro-Baez, A.G.; Arcos-Aviles, D.; Barreno-Riera, M.; Landázuri-Avilés, B. A Systematic Review of Structural Health Monitoring Systems to Strengthen Post-Earthquake Assessment Procedures. Sensors 2022, 22, 9206. [Google Scholar] [CrossRef] [PubMed]
- Caballero-Russi, D.; Ortiz, A.R.; Guzmán, A.; Canchila, C. Design and Validation of a Low-Cost Structural Health Monitoring System for Dynamic Characterization of Structures. Appl. Sci. 2022, 12, 2807. [Google Scholar] [CrossRef]
- El-Sheimy, N.; Youssef, A. Inertial sensors technologies for navigation applications: State of the art and future trends. Satell. Navig. 2020, 1, 2. [Google Scholar] [CrossRef]
- Bose, A.; Bhat, K.N.; Kurian, T. Fundamentals of Navigation and Inertial Sensors; Eastern Economy Edition; PHI Learning: Delhi, India, 2014; 312p, ISBN 9788120348592. [Google Scholar]
- Satheesh Reddy, G.; Saraswat, V.K. Advanced Navigation System for Aircraft Applications. Def. Sci. J. 2013, 63, 131–137. [Google Scholar] [CrossRef]
- Grouios, G.; Ziagkas, E.; Loukovitis, A.; Chatzinikolaou, K.; Koidou, E. Accelerometers in Our Pocket: Does Smartphone Accelerometer Technology Provide Accurate Data? Sensors 2023, 23, 192. [Google Scholar] [CrossRef]
- Quicklogic. Available online: https://cdn.sparkfun.com/assets/7/a/c/c/e/QL-EOS-S3-Ultra-Low-Power-multicore-MCU-Datasheet-v3_3d.pdf (accessed on 11 March 2025).
- Drahanský, M.; Orság, F.; Hanáček, P. Accelerometer Based Digital Video Stabilization for Security Surveillance Systems. In Security Technology. SecTech 2009; Ślęzak, D., Kim, T., Fang, W.C., Arnett, K.P., Eds.; Communications in Computer and Information Science; Springer: Berlin/Heidelberg, Germany, 2009; Volume 58. [Google Scholar] [CrossRef]
- Levinzon, F. Practical Considerations of Accelerometers Noise; Endevco Sensing Systems, Technical Paper 324. Available online: https://endevco.com/contentStore/mktgContent/endevco/dlm_uploads/2019/02/Endevco_TP324_REVISED.pdf (accessed on 23 May 2025).
- Mohd-Yasin, F.; Korman, C.E.; Nagel, D.J. Measurement of noise characteristics of MEMS accelerometers. Solid-State Electron. 2003, 47, 357–360. [Google Scholar] [CrossRef]
- Brüel & Kjær Book. Measuring Vibration. 1982. Available online: https://www.bksv.com/media/doc/br0094.pdf (accessed on 23 May 2025).
- Brüel & Kjær. Back to Back Calibration of Accelerometers Using FFT Analysis for Sensitivity Comparison at 800 Frequencies. Application Note BO0237. Available online: https://www.bksv.com/media/doc/BO0237.pdf (accessed on 23 May 2025).
- Payne, B.F. The Application of Back-to-Back Accelerometers to Precision Vibration Measurements. J. Res. Natl. Bur. Stand. 1983, 88, 171–174. [Google Scholar] [CrossRef] [PubMed] [PubMed Central]
- Hernandez, W. Optimal estimation of the relevant information coming from a rollover sensor placed in a car under performance tests. Measurement 2008, 41, 20–31. [Google Scholar] [CrossRef]
- Hernández, W. Improving the Responses of Several Accelerometers Used in a Car under Performance Tests by Using Kalman Filtering. Sensors 2001, 1, 38–52. [Google Scholar] [CrossRef]
- Doyle, J. Robust and optimal control. In Proceedings of the 35th IEEE Conference on Decision and Control, Kobe, Japan, 13 December 1996; Volume 2, pp. 1595–1598. [Google Scholar] [CrossRef]
- Sheikhaleh, A.; Abedi, K.; Jafari, K. An Optical MEMS Accelerometer Based on a Two-Dimensional Photonic Crystal Add-Drop Filter. J. Light. Technol. 2017, 35, 3029–3034. [Google Scholar] [CrossRef]
- D’Arco, M.; Guerritore, M. Multi-Sensor Data Fusion Approach for Kinematic Quantities. Energies 2022, 15, 2916. [Google Scholar] [CrossRef]
- Valenti, R.G.; Dryanovski, I.; Xiao, J. Keeping a Good Attitude: A Quaternion-Based Orientation Filter for IMUs and MARGs. Sensors 2015, 15, 19302–19330. [Google Scholar] [CrossRef]
- Chikhalikar, S.; Khandekar, O.; Bhattacharya, C. Design of Real-Time Acquisition and Filtering for MEMS-based Accelerometer Data in Microcontroller. In Proceedings of the 2018 IEEE Electron Devices Kolkata Conference (EDKCON), Kolkata, India, 24–25 November 2018; pp. 15–18. [Google Scholar] [CrossRef]
- Dargie, W. Analysis of Time and Frequency Domain Features of Accelerometer Measurements. In Proceedings of the 18th International Conference on Computer Communications and Networks, San Francisco, CA, USA, 3–6 August 2009; pp. 1–6. [Google Scholar] [CrossRef]
- Kumari, S. Vibration Measurement Using Accelerometer Sensor and Fast Fourier Transform. In Trends in Wireless Communication and Information Security; Chakraborty, M., Jha, R.K., Balas, V.E., Sur, S.N., Kandar, D., Eds.; Lecture Notes in Electrical Engineering; Springer: Singapore, 2021; Volume 740. [Google Scholar] [CrossRef]
- Chui, C.K. An Introduction to Wavelets; Academic Press: San Diego, CA, USA, 1992; ISBN 0-12-174584-8. [Google Scholar]
- Ferdinando, H.; Seppälä, E.; Myllylä, T. Discrete Wavelet Transforms-Based Analysis of Accelerometer Signals for Continuous Human Cardiac Monitoring. Appl. Sci. 2021, 11, 12072. [Google Scholar] [CrossRef]
- He, Z. Activity recognition from accelerometer signals based on Wavelet-AR model. In Proceedings of the 2010 IEEE International Conference on Progress in Informatics and Computing, Shanghai, China, 10–12 December 2010; pp. 499–502. [Google Scholar] [CrossRef]
- Cho, H.; Park, J.; Park, K. Analysis of Axial Acceleration for the Detection of Rail Squats in High-Speed Railways. CivilEng 2023, 4, 1143–1156. [Google Scholar] [CrossRef]
- Bolshakova, A.; Podgornaya, L.; Tkachenko, A.; Larionov, D.; Shalymov, R.; Boronachin, A.; Bokhman, E. Specific Features of Using Micromechanical Accelerometers for Monitoring Short and Impact Irregularities of the Railway Track. In Proceedings of the 2021 28th Saint Petersburg International Conference on Integrated Navigation Systems (ICINS), Saint Petersburg, Russia, 31 May–2 June 2021; pp. 1–3. [Google Scholar] [CrossRef]
- Traquinho, N.; Vale, C.; Ribeiro, D.; Meixedo, A.; Montenegro, P.; Mosleh, A.; Calçada, R. Damage Identification for Railway Tracks Using Onboard Monitoring Systems in In-Service Vehicles and Data Science. Machines 2023, 11, 981. [Google Scholar] [CrossRef]
- Bragança, C.; Souza, E.F.; Ribeiro, D.; Meixedo, A.; Bittencourt, T.N.; Carvalho, H. Drive-by Methodologies Applied to Railway Infrastructure Subsystems: A Literature Review—Part II: Track and Vehicle. Appl. Sci. 2023, 13, 6982. [Google Scholar] [CrossRef]
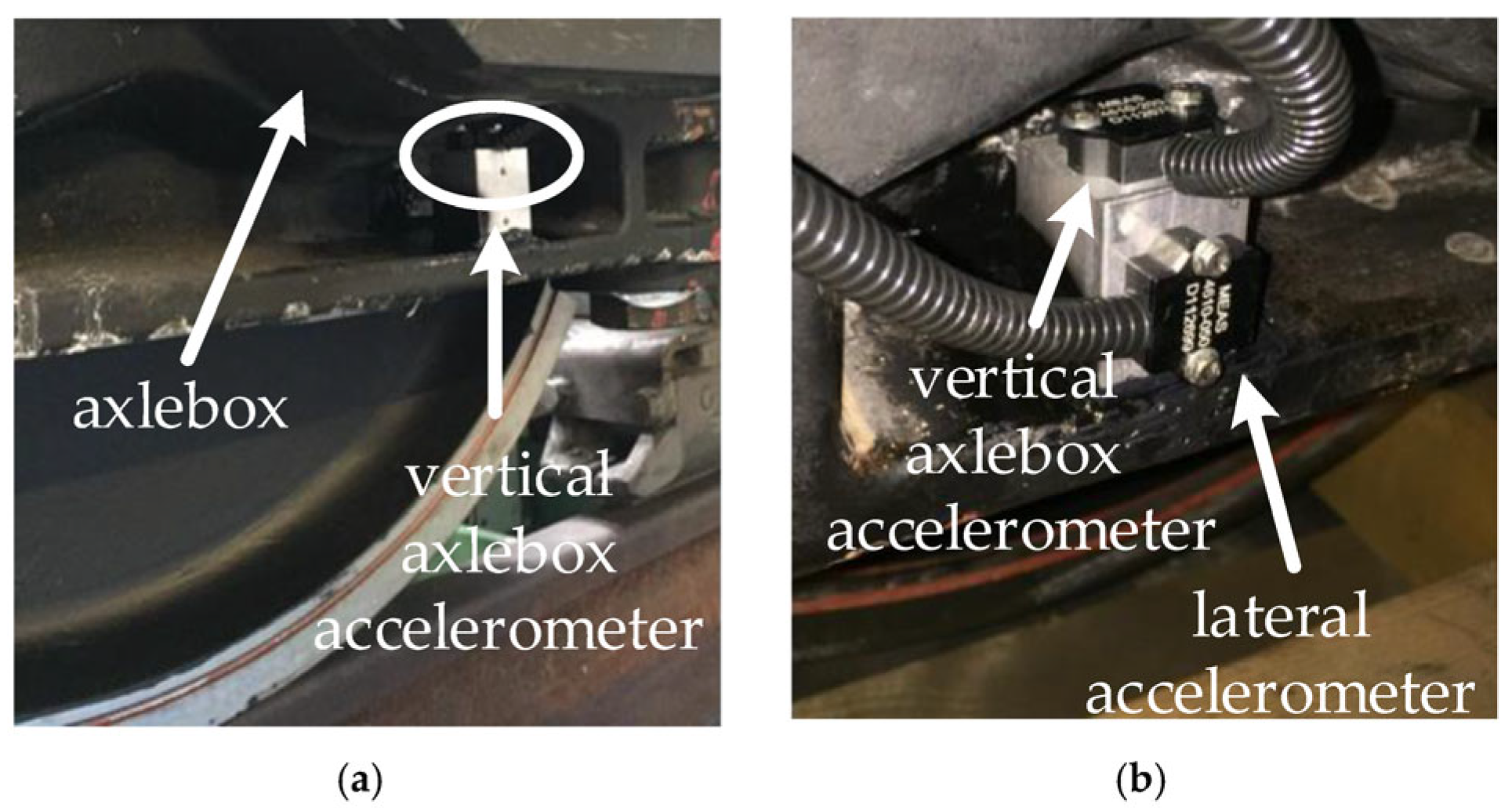
- Faccini, L.; Karaki, J.; Di Gialleonardo, E.; Somaschini, C.; Bocciolone, M.; Collina, A. A Methodology for Continuous Monitoring of Rail Corrugation on Subway Lines Based on Axlebox Acceleration Measurements. Appl. Sci. 2023, 13, 3773. [Google Scholar] [CrossRef]
- Chellaswamy, C.; Duraichamy, S.; Glaretsubin, P.; Vanathi, A. Optimized vehicle acceleration measurement for rail track condition monitoring. In Proceedings of the 2017 2nd International Conference on Computing and Communications Technologies (ICCCT), Chennai, India, 23–24 February 2017; pp. 155–160. [Google Scholar] [CrossRef]
- Balouchi, F.; Bevan, A.; Formston, R. Detecting railway under-track voids using multi-train in-service vehicle accelerometer. In Proceedings of the 7th IET Conference on Railway Condition Monitoring 2016 (RCM 2016), Birmingham, UK, 27–28 September 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Shin, J.H.; Park, J.H.; Shin, Y.J. Development of hunting oscillation detection algorithm for railway vehicles by using accelerometers. Adv. Mech. Eng. 2024, 16, 1–12. [Google Scholar] [CrossRef]
- Tang, Z.; Zhou, S.; Guo, S.; Zhuo, J. Design and Implementation of a PHM Vibration Monitoring System for Rail Vehicles Based on the Internet of Things. In Proceedings of the 2024 Global Reliability and Prognostics and Health Management Conference (PHM-Beijing), Beijing, China, 11–13 October 2024; pp. 1–7. [Google Scholar] [CrossRef]
- Angrisani, L.; Grillo, D.; Moriello, R.S.L.; Filo, G. Automatic detection of train arrival through an accelerometer. In Proceedings of the 2010 IEEE Instrumentation & Measurement Technology Conference Proceedings, Austin, TX, USA, 3–6 May 2010; pp. 898–902. [Google Scholar] [CrossRef]
- Zeng, Y.; Núñez, A.; Dollevoet, R.; Zoeteman, A.; Li, Z. A Train-Borne Laser Vibrometer Solution Based on Multisignal Fusion for Self-Contained Railway Track Monitoring. IEEE Trans. Ind. Inform. 2025, 21, 1585–1594. [Google Scholar] [CrossRef]
- Sun, X.; Yang, F.; Shi, J.; Ke, Z.; Zhou, Y. On-Board Detection of Longitudinal Track Irregularity Via Axle Box Acceleration in HSR. IEEE Access 2021, 9, 14025–14037. [Google Scholar] [CrossRef]
- Wei, Z.; Boogaard, A.; Núñez, A.; Li, Z.; Dollevoet, R. An Integrated Approach for Characterizing the Dynamic Behavior of the Wheel–Rail Interaction at Crossings. IEEE Trans. Instrum. Meas. 2018, 67, 2332–2344. [Google Scholar] [CrossRef]
- Boronakhin, A.M.; Bolshakova, A.V.; Klionskiy, D.M.; Larionov, D.Y.; Shalymov, R.V. Signal Processing Techniques from Accelerometers on Railway Transport Based on the Wavelet Transform. In Proceedings of the 2024 Conference of Young Researchers in Electrical and Electronic Engineering (ElCon), Saint Petersburg, Russia, 29–31 January 2024; pp. 875–879. [Google Scholar] [CrossRef]
- Jelila, Y.D.; Pamuła, W. Application of MEMS Sensors for the Condition Monitoring of Urban Tramways Based on MODWPT. IEEE Sens. J. 2023, 23, 24300–24307. [Google Scholar] [CrossRef]
- Wang, C.; Xiao, Q.; Liang, H.; Liu, Y.; Cai, X. On-line Monitoring of Railway Deformation Using Acceleration Measurement. In Proceedings of the 2006 6th World Congress on Intelligent Control and Automation, Dalian, China, 21–23 June 2006; pp. 5828–5832. [Google Scholar] [CrossRef]
- Zhang, W.; Zhang, B.; Xu, L.; Wang, D.; Chang, G. Modelling and fault diagnosis of railroad jointless track circuit. Electroteh. Electron. Autom. (EEA) 2019, 67, 76–82. [Google Scholar]
- Romo, E.; Goicoechea, J.-N.; Losa, D.; Fjardo, I.; Cuadrado, M. Technology Evolution in Passenger Transport; UIC Books: Chicago, IL, USA, 2017; p. 176. ISBN 978-2-7461-2599-5. [Google Scholar]
- EN 60077-2:2017; Railway Applications. Electric Equipment for Rolling Stock, Part 2: Electrotechnical Components—General Rules. International Electrotechnical Commission: Geneva, Switzerland, 2017. Available online: https://webstore.iec.ch/en/publication/61128 (accessed on 5 May 2020).
- EN 50155:2021; Railway Applications. Rolling Stock. Electronic Equipment. Available online: https://magazin.asro.ro/ro/standard/277468 (accessed on 5 May 2020).
- EN 12299:2024; Railway Applications. Ride Comfort for Passengers. Measurement and Evaluation. Available online: https://magazin.asro.ro/ro/standard/284326 (accessed on 5 May 2020).
- IEC 62974-1:2024; Monitoring and Measuring Systems Used for Data Collection, Aggregation and Analysis—Part 1: Device Requirements. International Electrotechnical Commission: Geneva, Switzerland, 2024. Available online: https://webstore.iec.ch/en/publication/68142 (accessed on 5 May 2020).
- IEC 60571:2012; Railway Applications—Electronic Equipment Used on Rolling Stock. International Electrotechnical Commission: Geneva, Switzerland, 2012. Available online: https://webstore.iec.ch/en/publication/2514 (accessed on 5 May 2020).
- ISO 16063-32:2016; Methods for the Calibration of Vibration and Shock Transducers. International Organization for Standardization: Geneva, Switzerland, 2016. Available online: https://www.iso.org/standard/40382.html (accessed on 5 May 2020).







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Output | Range | Frequency | Supply |
|---|---|---|---|---|
| Colybris VS9005, Safran, Mere, France | Ratiometric 0.5 ÷ 4.5 V | ±5 g | DC ÷ 1100 Hz | 5.5 Vdc < 0.5 mA |
| Colybris MS1005, Safran, Mere, France | Differential ± 2.7 V @full scale | ±5 g | DC ÷ 1400 Hz | 3.3 V |
| Althen ASC5521MF, Althen, Rijswijk, Netherlands | Differential | ±5 g | DC ÷ 1150 Hz | 5−40 Vdc < 15 mA |
| ECO-Rail-3325, ASC Gmbh, Pfaffenhofen, Germany | CAN communication | ±4 g | DC ÷ 1500 Hz | 24 Vdc < 35 mA |
| Triaxial 356A19, PCB Piezotronics, Depew, NY, USA | Analog @ 10 mV/1 g | max ±500 g | max 15 kHz | 18−30 V 20 mA |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Published by MDPI on behalf of the International Institute of Knowledge Innovation and Invention. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tudor, E.; Vasile, I.; Lipcinski, D.; Dumitru, C.; Tănase, N.; Drăghici, F.; Popa, G. Accelerometers in Monitoring Systems for Rail Vehicle Applications: A Literature Review. Appl. Syst. Innov. 2025, 8, 70. https://doi.org/10.3390/asi8030070
Tudor E, Vasile I, Lipcinski D, Dumitru C, Tănase N, Drăghici F, Popa G. Accelerometers in Monitoring Systems for Rail Vehicle Applications: A Literature Review. Applied System Innovation. 2025; 8(3):70. https://doi.org/10.3390/asi8030070
Chicago/Turabian StyleTudor, Emil, Ionuț Vasile, Daniel Lipcinski, Constantin Dumitru, Nicolae Tănase, Florian Drăghici, and Gabriel Popa. 2025. "Accelerometers in Monitoring Systems for Rail Vehicle Applications: A Literature Review" Applied System Innovation 8, no. 3: 70. https://doi.org/10.3390/asi8030070
APA StyleTudor, E., Vasile, I., Lipcinski, D., Dumitru, C., Tănase, N., Drăghici, F., & Popa, G. (2025). Accelerometers in Monitoring Systems for Rail Vehicle Applications: A Literature Review. Applied System Innovation, 8(3), 70. https://doi.org/10.3390/asi8030070