
Combining Earliest Deadline First Scheduling with Scheduled Traffic Support in Automotive TSN-Based Networks




Abstract
1. Introduction and Motivation
- The detailed design of D-ST, which allows for transmitting periodic, RT event-driven, and scheduled traffic within a common framework.
- A simulative assessment of D-ST in a realistic automotive scenario.
2. Related Work
3. Background
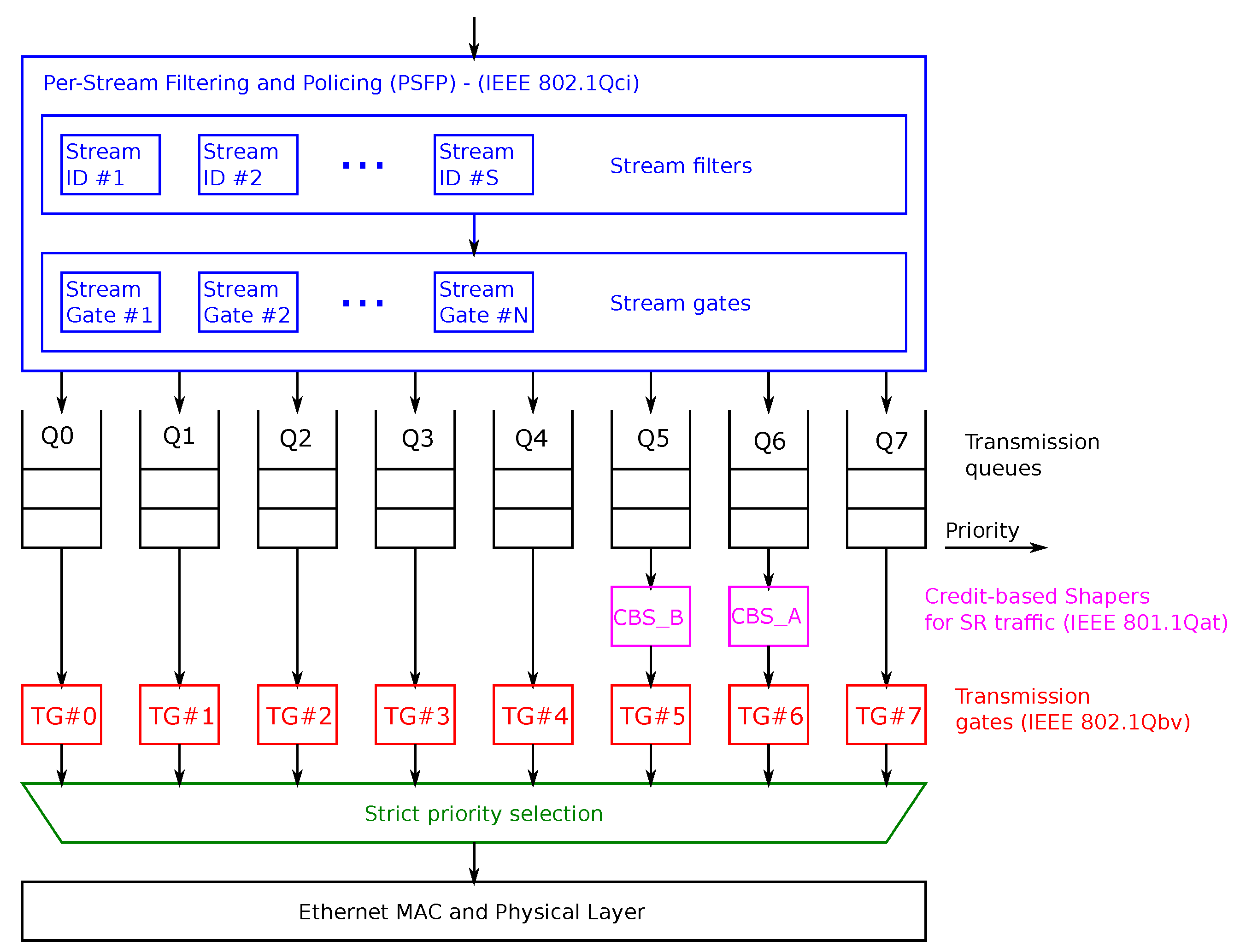
3.1. IEEE 802.1Qbv
3.2. Per-Stream Filtering and Policing (PSFP)
4. Design
4.1. Overview
4.1.1. Configuration of the Switches
4.1.2. Configuration of the End Nodes
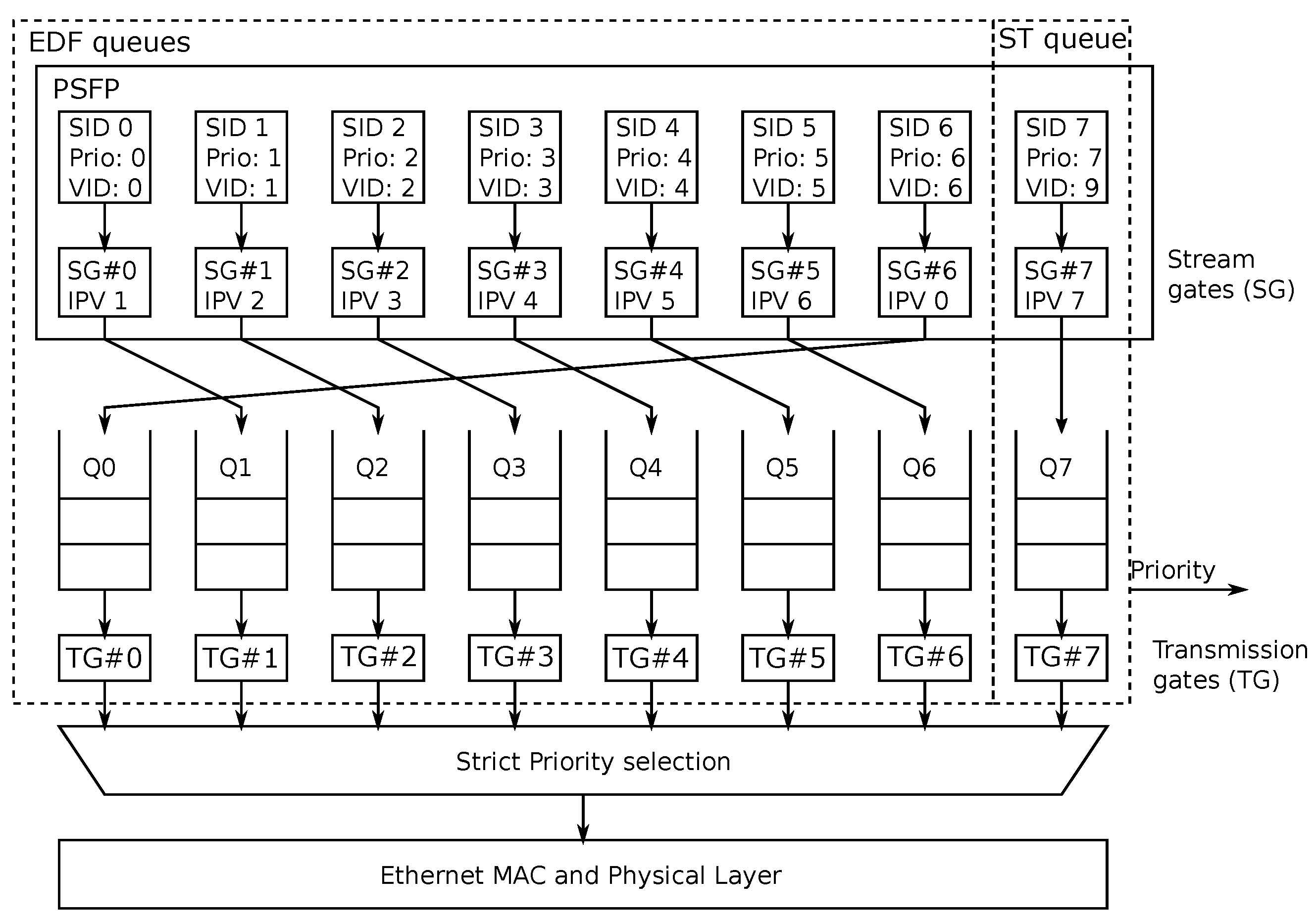
4.2. Combining Scheduled Traffic Support with EDF Scheduling
5. Performance Assessment
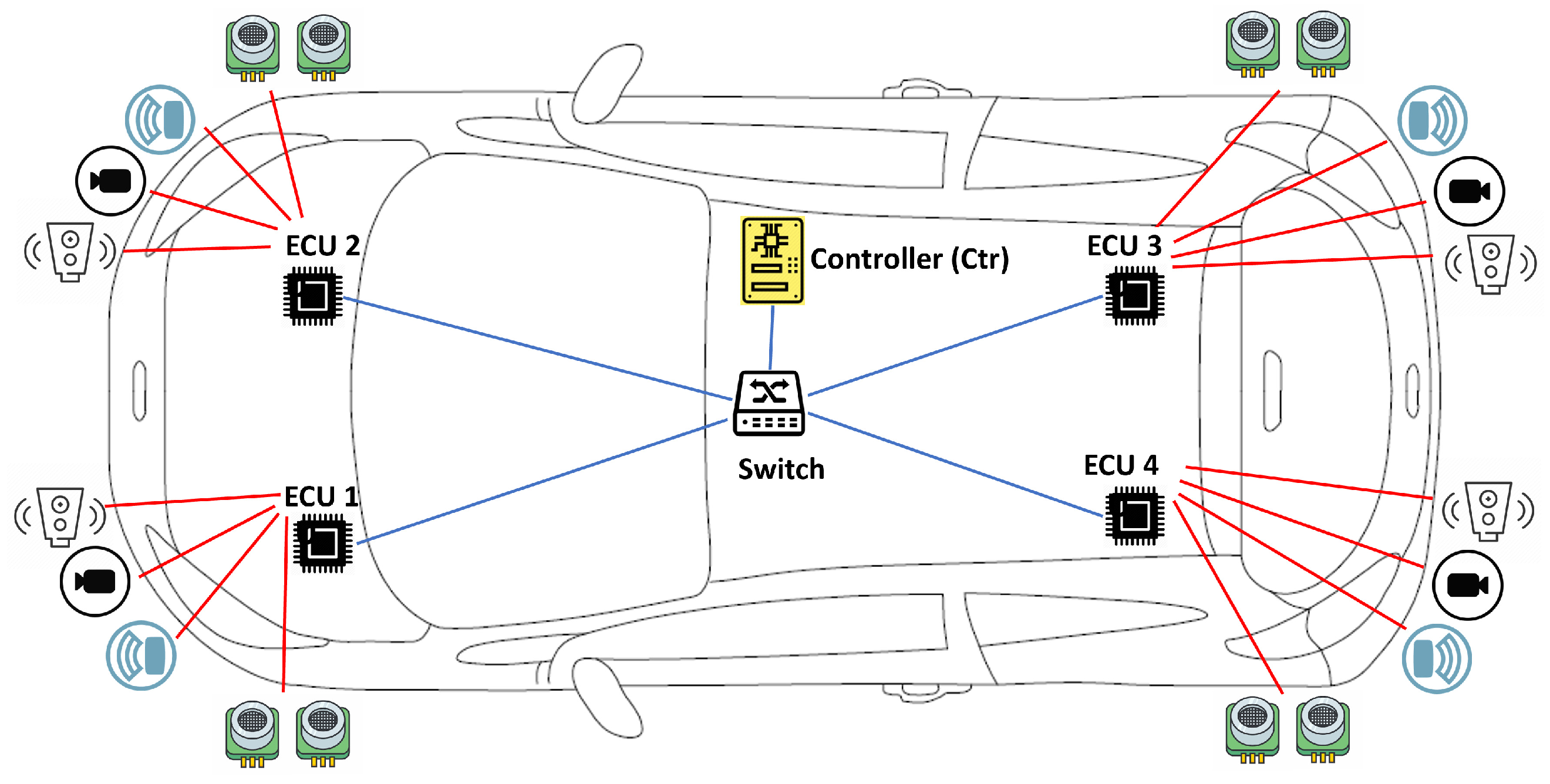
5.1. Scenario
5.2. Comparison between D-ST and TSN-ST
5.3. Comparison between D-ST and D-TSN
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| AbsJitter | Absolute jitter |
| ADAS | Advanced Driver Assistance System |
| ATS | Asynchronous Traffic Shaping |
| AVB | Audio Video Bridging |
| BE | Best-effort |
| CBS | Credit-Based Shaping |
| COTS | Commercial off-the-shelf |
| D-ST | Deadline-ST |
| D-TSN | Deadline-TSN |
| e2eDelay | End-to-end delay |
| ECU | Electronic Control Unit |
| ED | Event-driven |
| EDF | Earliest Deadline First |
| INET | Internet Networking |
| FIFO | First-in first-out |
| IPV | Internal Priority Value |
| LiDAR | Light Detection and Ranging |
| MAC | Medium access control |
| MDPI | Multidisciplinary Digital Publishing Institute |
| NeSTiNg | Network Simulator for Time-Sensitive Networking |
| OMNeT++ | Objective Modular Network Testbed in C++ |
| PSFP | Per-Stream Filtering and Policing |
| RT | Real-time |
| SDN | Software-Defined Networking |
| SID | Stream Identifier |
| SMT | Satisfiability Modulo Theories |
| SP | Strict Priority |
| SR | Stream Reservation |
| ST | Scheduled Traffic |
| TSN | Time-Sensitive Networking |
| TSN-ST | Time-Sensitive Networking with Scheduled Traffic |
| TSpecs | Traffic Specifications |
| VID | VLAN Identifier |
| VLAN | Virtual LAN |
References
- Costa, D.G.; Collotta, M.; Pau, G.; Duran-Faundez, C. A fuzzy-based approach for sensing, coding and transmission configuration of visual sensors in smart city applications. Sensors 2017, 17, 93. [Google Scholar] [CrossRef] [PubMed]
- Habibi, F.; Birgani, O.; Koppelaar, H.; Radenović, S. Using fuzzy logic to improve the project time and cost estimation based on Project Evaluation and Review Technique (PERT). J. Proj. Manag. 2018, 3, 183–196. [Google Scholar] [CrossRef]
- Iannizzotto, G.; La Rosa, F.; Lo Bello, L. A wireless sensor network for distributed autonomous traffic monitoring. In Proceedings of the 3rd International Conference on Human System Interaction, Rzeszow, Poland, 13–15 May 2010; pp. 612–619. [Google Scholar] [CrossRef]
- Cavalieri, S. Semantic interoperability between IEC 61850 and oneM2M for IoT-enabled smart grids. Sensors 2021, 21, 2571. [Google Scholar] [CrossRef] [PubMed]
- Ajjaj, S.; El Houssaini, S.; Hain, M.; El Houssaini, M.A. Performance Assessment and Modeling of Routing Protocol in Vehicular Ad Hoc Networks Using Statistical Design of Experiments Methodology: A Comprehensive Study. Appl. Syst. Innov. 2022, 5, 19. [Google Scholar] [CrossRef]
- Patti, G.; Leonardi, L.; Lo Bello, L. A Novel MAC Protocol for Low Datarate Cooperative Mobile Robot Teams. Electronics 2020, 9, 235. [Google Scholar] [CrossRef]
- Jamil, S.; Rahman, M.; Fawad. A Comprehensive Survey of Digital Twins and Federated Learning for Industrial Internet of Things (IIoT), Internet of Vehicles (IoV) and Internet of Drones (IoD). Appl. Syst. Innov. 2022, 5, 56. [Google Scholar] [CrossRef]
- Toscano, E.; Lo Bello, L. Cross-channel interference in IEEE 802.15.4 networks. In Proceedings of the 2008 IEEE International Workshop on Factory Communication Systems (WFCS 2008), Dresden, Germany, 21–23 May 2008; IEEE: Piscataway, NJ, USA, 2008; pp. 139–148. [Google Scholar]
- Fedullo, T.; Tramarin, F.; Vitturi, S. The impact of rate adaptation algorithms on wi-fi-based factory automation systems. Sensors 2020, 20, 5195. [Google Scholar] [CrossRef]
- Patti, G.; Lo Bello, L. A priority-aware multichannel adaptive framework for the IEEE 802.15.4e-LLDN. IEEE Trans. Ind. Electron. 2016, 63, 6360–6370. [Google Scholar] [CrossRef]
- Patti, G.; Alderisi, G.; Lo Bello, L. Introducing multi-level communication in the IEEE 802.15.4e protocol: The MultiChannel-LLDN. In Proceedings of the 2014 IEEE Emerging Technology and Factory Automation (ETFA 2014), Barcelona, Spain, 16–19 September 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 1–8. [Google Scholar]
- Daoud, R.M.; Amer, H.H.; Elsayed, H.M.; Sallez, Y. Fault-Tolerant Ethernet-Based Vehicle On-Board Networks. In Proceedings of the IECON 2006—32nd Annual Conference on IEEE Industrial Electronics, Paris, France, 6–10 November 2006; pp. 4662–4665. [Google Scholar] [CrossRef]
- Wurst, F.; Dasari, D.; Hamann, A.; Ziegenbein, D.; Sanudo, I.; Capodieci, N.; Bertogna, M.; Burgio, P. System performance modelling of heterogeneous hw platforms: An automated driving case study. In Proceedings of the 2019 22nd Euromicro Conference on Digital System Design (DSD), Kallithea, Greece, 28 August 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 365–372. [Google Scholar]
- ARINC 664 P7; Aircraft Data Network, PART 7 Avionics Full-Duplex Switched Ethernet Network. Aeronautical Radio. Inc.: Annapolis, MD, USA, 2009.
- AS6802; Time-Triggered Ethernet Standard AS6802. SAE: Warrendale, PA, USA, 2016. Available online: https://www.sae.org/standards/content/as6802 (accessed on 28 November 2022).
- Ferrari, P.; Sisinni, E.; Bellagente, P.; Rinaldi, S.; Pasetti, M.; de Sá, A.O.; Machado, R.C.; Carmo, L.F.d.C.; Casimiro, A. Model-based stealth attack to networked control system based on real-time Ethernet. IEEE Trans. Ind. Electron. 2020, 68, 7672–7683. [Google Scholar] [CrossRef]
- Ashjaei, M.; Mubeen, S.; Lundbäck, J.; Gålnander, M.; Lundbäck, K.L.; Nolte, T. Modeling and Timing Analysis of Vehicle Functions Distributed over Switched Ethernet. In Proceedings of the IECON 2017-43rd Annual Conference of the IEEE Industrial Electronics Society, Beijing, China, 29 October–1 November 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 8419–8424. [Google Scholar]
- Carpenzano, A.; Caponetto, R.; Lo Bello, L.; Mirabella, O. Fuzzy traffic smoothing: An approach for real-time communication over Ethernet networks. In Proceedings of the 4th IEEE International Workshop on Factory Communication Systems (WFCS 2002), Vasteras, Sweden, 28–30 August 2002; IEEE: Piscataway, NJ, USA, 2002; pp. 241–248. [Google Scholar]
- Lo Bello, L.; Kaczynski, G.A.; Mirabella, O. Improving the real-time behavior of Ethernet networks using traffic smoothing. IEEE Trans. Ind. Inform. 2005, 1, 151–161. [Google Scholar] [CrossRef]
- 802.1AS-2011; IEEE Standard for Local and Metropolitan Area Networks—Timing and Synchronization for Time-Sensitive Applications in Bridged Local Area Networks. IEEE: Piscataway, NJ, USA, 2011.
- 802.1Qat-2010; IEEE Standard for Local and Metropolitan Area Networks—Virtual Bridged Local Area Networks Amendment 14: Stream Reservation Protocol (SRP). IEEE: Piscataway, NJ, USA, 2010.
- 802.1Qav-2009; IEEE Virtual Bridged Local Area Networks Amendment 12: Forwarding and Queuing Enhancements for Time-Sensitive Streams. IEEE: Piscataway, NJ, USA, 2009; p. C1-72.
- 802.1Q-2014; IEEE Standard for Local and Metropolitan Area Networks, Bridges and Bridged Networks. IEEE: Piscataway, NJ, USA, 2014.
- 802.1AS-2020 (Revision of IEEE Std 802.1AS-2011); IEEE Standard for Local and Metropolitan Area Networks—Timing and Synchronization for Time-Sensitive Applications. IEEE: Piscataway, NJ, USA, 2020; pp. 1–421. [CrossRef]
- 802.1Qbv-2016; IEEE Standard for Local and Metropolitan Area Networks—Bridges and Bridged Networks-Amendment 25: Enhancements for Scheduled Traffic. IEEE: Piscataway, NJ, USA, 2016. [CrossRef]
- 802.1Qci-2017; IEEE Standard for Local and Metropolitan Area Networks—Bridges and Bridged Networks–Amendment 28: Per-Stream Filtering and Policing. IEEE: Piscataway, NJ, USA, 2017; pp. 1–65. [CrossRef]
- 802.1Q-2018; IEEE Standard for Local and Metropolitan Area Networks—Bridges and Bridged Networks. IEEE: Piscataway, NJ, USA, 2018.
- 802.1Qcc-2018; IEEE Standard for Local and metropolitan Area Networks—Bridges and Bridged Networks-Amendment 31: Stream Reservation Protocol (SRP) Enhancements and Performance Improvements. IEEE: Piscataway, NJ, USA, 2018.
- Patti, G.; Lo Bello, L.; Leonardi, L. Deadline-Aware Online Scheduling of TSN Flows for Automotive Applications. IEEE Trans. Ind. Inform. 2022, 1–10. [Google Scholar] [CrossRef]
- Haeberle, M.; Heimgaertner, F.; Loehr, H.; Nayak, N.; Grewe, D.; Schildt, S.; Menth, M. Softwarization of Automotive E/E Architectures: A Software-Defined Networking Approach. In Proceedings of the 2020 IEEE Vehicular Networking Conference (VNC), New York, NY, USA, 16–18 December 2020. [Google Scholar]
- Leonardi, L.; Lo Bello, L.; Patti, G. Bandwidth partitioning for Time-Sensitive Networking flows in automotive communications. IEEE Commun. Lett. 2021, 25, 3258–3261. [Google Scholar] [CrossRef]
- Lo Bello, L.; Patti, G.; Vasta, G. Assessments of Real-Time Communications over TSN Automotive Networks. Electronics 2021, 10, 556. [Google Scholar] [CrossRef]
- 802.1Qcr-2020; IEEE Standard for Local and Metropolitan Area Networks—Bridges and Bridged Networks-Amendment 34:Asynchronous Traffic Shaping. IEEE: Piscataway, NJ, USA, 2020; pp. 1–151. [CrossRef]
- Thiele, D.; Ernst, R. Formal worst-case performance analysis of time-sensitive Ethernet with frame preemption. In Proceedings of the 2016 IEEE 21st International Conference on Emerging Technologies and Factory Automation (ETFA), Berlin, Germany, 6–9 September 2016; pp. 1–9. [Google Scholar] [CrossRef]
- Bujosa, D.; Ashjaei, M.; Papadopoulos, A.; Proenza, J.; Nolte, T. LETRA: Mapping Legacy Ethernet-Based Traffic into TSN Traffic Classes. In Proceedings of the 2021 26th IEEE International Conference on Emerging Technologies and Factory Automation (ETFA), Vasteras, Sweden, 7 September 2021. [Google Scholar]
- Patti, G.; Alderisi, G.; Lo Bello, L. SchedWiFi: An innovative approach to support scheduled traffic in ad-hoc industrial IEEE 802.11 networks. In Proceedings of the IEEE 20th Conference on Emerging Technologies & Factory Automation (ETFA 2015), Luxembourg, 8–11 September 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 1–9. [Google Scholar]
- Yu, Q.; Wan, H.; Zhao, X.; Gao, Y.; Gu, M. Online Scheduling for Dynamic VM Migration in Multicast Time-Sensitive Networks. IEEE Trans. Ind. Inform. 2020, 16, 3778–3788. [Google Scholar] [CrossRef]
- Fedullo, T.; Morato, A.; Tramarin, F.; Rovati, L.; Vitturi, S. A Comprehensive Review on Time Sensitive Networks with a Special Focus on Its Applicability to Industrial Smart and Distributed Measurement Systems. Sensors 2022, 22, 1638. [Google Scholar] [CrossRef]
- Lo Bello, L.; Ashjaei, M.; Patti, G.; Behnam, M. Schedulability analysis of Time-Sensitive Networks with scheduled traffic and preemption support. J. Parallel Distrib. Comput. 2020, 144, 153–171. [Google Scholar] [CrossRef]
- Atallah, A.A.; Hamad, G.B.; Mohamed, O.A. Routing and Scheduling of Time-Triggered Traffic in Time-Sensitive Networks. IEEE Trans. Ind. Inform. 2020, 16, 4525–4534. [Google Scholar] [CrossRef]
- Syed, A.A.; Ayaz, S.; Leinmüller, T.; Chandra, M. Dynamic Scheduling and Routing for TSN based In-vehicle Networks. In Proceedings of the 2021 IEEE International Conference on Communications Workshops (ICC Workshops), Montreal, QC, Canada, 14–23 June 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Vlk, M.; Brejchová, K.; Hanzálek, Z.; Tang, S. Large-scale periodic scheduling in time-sensitive networks. Comput. Oper. Res. 2022, 137, 105512. [Google Scholar] [CrossRef]
- Hackel, T.; Meyer, P.; Korf, F.; Schmidt, T.C. Software-defined networks supporting time-sensitive in-vehicular communication. In Proceedings of the 2019 IEEE 89th Vehicular Technology Conference (VTC2019-Spring), Kuala Lumpur, Malaysia, 28 April–1 May 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–5. [Google Scholar]
- Hussain, M.; Shah, N.; Amin, R.; Alshamrani, S.S.; Alotaibi, A.; Raza, S.M. Software-defined networking: Categories, analysis, and future directions. Sensors 2022, 22, 5551. [Google Scholar] [CrossRef]
- Miano, S.; Risso, F. Transforming a traditional home gateway into a hardware-accelerated SDN switch. Int. J. Electr. Comput. Eng. 2020, 10, 2668. [Google Scholar] [CrossRef]
- Haji, S.H.; Zeebaree, S.; Saeed, R.H.; Ameen, S.Y.; Shukur, H.M.; Omar, N.; Sadeeq, M.A.; Ageed, Z.S.; Ibrahim, I.M.; Yasin, H.M. Comparison of software defined networking with traditional networking. Asian J. Res. Comput. Sci. 2021, 1–18. [Google Scholar] [CrossRef]
- Leonardi, L.; Lo Bello, L.; Aglianò, S. Priority-based bandwidth management in virtualized software-defined networks. Electronics 2020, 9, 1009. [Google Scholar] [CrossRef]
- Pang, Z.; Huang, X.; Li, Z.; Zhang, S.; Xu, Y.; Wan, H.; Zhao, X. Flow Scheduling for Conflict-Free Network Updates in Time-Sensitive Software-Defined Networks. IEEE Trans. Ind. Inform. 2021, 17, 1668–1678. [Google Scholar] [CrossRef]
- Nayak, N.G.; Dürr, F.; Rothermel, K. Incremental Flow Scheduling and Routing in Time-Sensitive Software-Defined Networks. IEEE Trans. Ind. Inform. 2018, 14, 2066–2075. [Google Scholar] [CrossRef]
- Specht, J.; Samii, S. Synthesis of Queue and Priority Assignment for Asynchronous Traffic Shaping in Switched Ethernet. In Proceedings of the 2017 IEEE Real-Time Systems Symposium (RTSS), Paris, France, 5–8 December 2017; pp. 178–187. [Google Scholar] [CrossRef]
- Aamir, K.M.; Abbas, M.; Radenović, S. A logarithmic time complexity algorithm for pattern searching using product—Sum property. Comput. Math. Appl. 2011, 62, 2162–2168. [Google Scholar] [CrossRef]
- dos Santos, A.C.T.; Schneider, B.; Nigam, V. TSNSCHED: Automated Schedule Generation for Time Sensitive Networking. In Proceedings of the 2019 Formal Methods in Computer Aided Design (FMCAD), San Jose, CA, USA, 22–25 October 2019; pp. 69–77. [Google Scholar] [CrossRef]
- Houtan, B.; Ashjaei, M.; Daneshtalab, M.; Sjödin, M.; Mubeen, S. Synthesising Schedules to Improve QoS of Best-Effort Traffic in TSN Networks. In Proceedings of the 29th International Conference on Real-Time Networks and Systems, Association for Computing Machinery. Nantes, France, 7–9 April 2021; RTNS’2021. pp. 68–77. [Google Scholar] [CrossRef]
- Pei, J.; Hu, Y.; Tian, L.; Li, M.; Li, Z. A Hybrid Traffic Scheduling Strategy for Time-Sensitive Networking. Electronics 2022, 11, 3762. [Google Scholar] [CrossRef]
- Zhao, Y.; Yang, Z.; He, X.; Wu, J.; Cao, H.; Dong, L.; Dang, F.; Liu, Y. E-TSN: Enabling Event-triggered Critical Traffic in Time-Sensitive Networking for Industrial Applications. In Proceedings of the 2022 IEEE 42nd International Conference on Distributed Computing Systems (ICDCS), Bologna, Italy, 10–13 July 2022; pp. 691–701. [Google Scholar] [CrossRef]
- Casini, D.; Biondi, A.; Buttazzo, G. Handling Transients of Dynamic Real-Time Workload Under EDF Scheduling. IEEE Trans. Comput. 2019, 68, 820–835. [Google Scholar] [CrossRef]
- OMNeT++ Discrete Event Simulator. Available online: http://www.omnetpp.org (accessed on 28 November 2022).
- Varga, A. A practical introduction to the OMNeT++ simulation framework. In Recent Advances in Network Simulation; Springer: Berlin/Heidelberg, Germany, 2019; pp. 3–51. [Google Scholar]
- Houtan, B.; Bergström, A.; Ashjaei, M.; Daneshtalab, M.; Sjödin, M.; Mubeen, S. An Automated Configuration Framework for TSN Networks. In Proceedings of the 22nd IEEE International Conference on Industrial Technology (ICIT’21), Valencia, Spain, 10–12 March 2021. [Google Scholar]
- Battaglia, F.; Collotta, M.; Leonardi, L.; Lo Bello, L.; Patti, G. Novel Extensions to Enhance Scalability and Reliability of the IEEE 802.15.4-DSME Protocol. Electronics 2020, 9, 126. [Google Scholar] [CrossRef]
- Falk, J.; Hellmanns, D.; Carabelli, B.; Nayak, N.; Dürr, F.; Kehrer, S.; Rothermel, K. NeSTiNg: Simulating IEEE Time-sensitive Networking (TSN) in OMNeT++. In Proceedings of the International Conference on Networked Systems (NetSys), Munich, Germany, 18–21 March 2019; pp. 1–8. [Google Scholar] [CrossRef]
- Kaczynski, G.A.; Lo Bello, L.; Nolte, T. Deriving exact stochastic response times of periodic tasks in hybrid priority-driven soft real-time systems. In Proceedings of the 2007 IEEE Conference on Emerging Technologies and Factory Automation (EFTA 2007), Patras, Greece, 25–28 September 2007; IEEE: Piscataway, NJ, USA, 2007; pp. 101–110. [Google Scholar]
- Fontanelli, D.; Greco, L.; Palopoli, L. Optimal resource allocation for stochastic systems performance optimisation of control tasks undergoing stochastic execution times. Int. J. Control. 2022, 95, 461–472. [Google Scholar] [CrossRef]
- Diaz, J.; Lopez, J.; Garcia, M.; Campos, A.; Kim, K.; Lo Bello, L. Pessimism in the stochastic analysis of real-time systems: Concept and applications. In Proceedings of the 25th IEEE International Real-Time Systems Symposium (RTSS 2004), Lisbon, Portugal, 5–8 December 2004; pp. 197–207. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
| Approach | RT Event-Driven Flows | Scheduled Traffic | IEEE 802.1Q Standard Compliance | Scheduling Granularity |
|---|---|---|---|---|
| AVB [21,22] | - | - | yes | per-class |
| AVB+ST [21,22,25] | - | ✓✓✓ | yes | per class |
| ATS [33] | ✓✓ | - | yes | per-flow |
| EDSched [32] | ✓✓ | ✓✓✓ | yes | per-class |
| D-TSN [29] | ✓✓✓ | - | yes | per-frame |
| Approach in [52] | ✓ | ✓✓✓ | yes | per-flow |
| Approach in [53] | ✓ | ✓✓✓ | yes | per-flow |
| Hybrid-TSN [54] | ✓✓✓ | ✓✓ | no | per-flow |
| E-TSN [55] | ✓✓ | ✓✓ | yes | per-class |
| D-ST | ✓✓✓ | ✓✓ | yes | per-frame |
| Flow | Size (KB) | Workload (Mbps) | Period (ms) | Relative Deadline (ms) | Type |
|---|---|---|---|---|---|
| LiDAR | 0.25 | 0.93 | 10 | 10 | Periodic |
| Ultrasonic | 0.10 | 0.23 | 20 | 20 | Periodic |
| ADAS sensors | 10 | 34 | uniform (10–100) | 1 | Event-driven |
| Video | 43 | 100 | 16 | 10 | Periodic |
| Flow | Deadline (ms) | D-ST Max e2eDelay (ms) | TSN-ST Max e2eDelay (ms) |
|---|---|---|---|
| LiDAR | 10 | 0.01 | 0.01 |
| Ultrasonic | 20 | 0.01 | 0.01 |
| ADAS sensors | 1 | 0.45 | 1.56 |
| Video | 10 | 8.50 | 7.90 |
| Parameter | Time Unit | Number of Stream Gates (N) | Number of Queues Used for EDF Transmissions per Ethernet Port (Q) |
|---|---|---|---|
| D-TSN | 220 | 8 | 8 |
| D-ST | 220 | 7 | 7 |
| Flow | Deadline (ms) | D-ST Max e2eDelay (ms) | D-TSN Max e2eDelay (ms) |
|---|---|---|---|
| LiDAR | 10 | 0.01 | 8.29 |
| Ultrasonic | 20 | 0.01 | 18.26 |
| ADAS sensors | 1 | 0.45 | 0.45 |
| Video | 10 | 8.50 | 8.28 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Leonardi, L.; Lo Bello, L.; Patti, G. Combining Earliest Deadline First Scheduling with Scheduled Traffic Support in Automotive TSN-Based Networks. Appl. Syst. Innov. 2022, 5, 125. https://doi.org/10.3390/asi5060125
Leonardi L, Lo Bello L, Patti G. Combining Earliest Deadline First Scheduling with Scheduled Traffic Support in Automotive TSN-Based Networks. Applied System Innovation. 2022; 5(6):125. https://doi.org/10.3390/asi5060125
Chicago/Turabian StyleLeonardi, Luca, Lucia Lo Bello, and Gaetano Patti. 2022. "Combining Earliest Deadline First Scheduling with Scheduled Traffic Support in Automotive TSN-Based Networks" Applied System Innovation 5, no. 6: 125. https://doi.org/10.3390/asi5060125
APA StyleLeonardi, L., Lo Bello, L., & Patti, G. (2022). Combining Earliest Deadline First Scheduling with Scheduled Traffic Support in Automotive TSN-Based Networks. Applied System Innovation, 5(6), 125. https://doi.org/10.3390/asi5060125