

An Efficient Downwelling Light Sensor Data Correction Model for UAV Multi-Spectral Image DOM Generation



Abstract
1. Introduction
2. Methodology
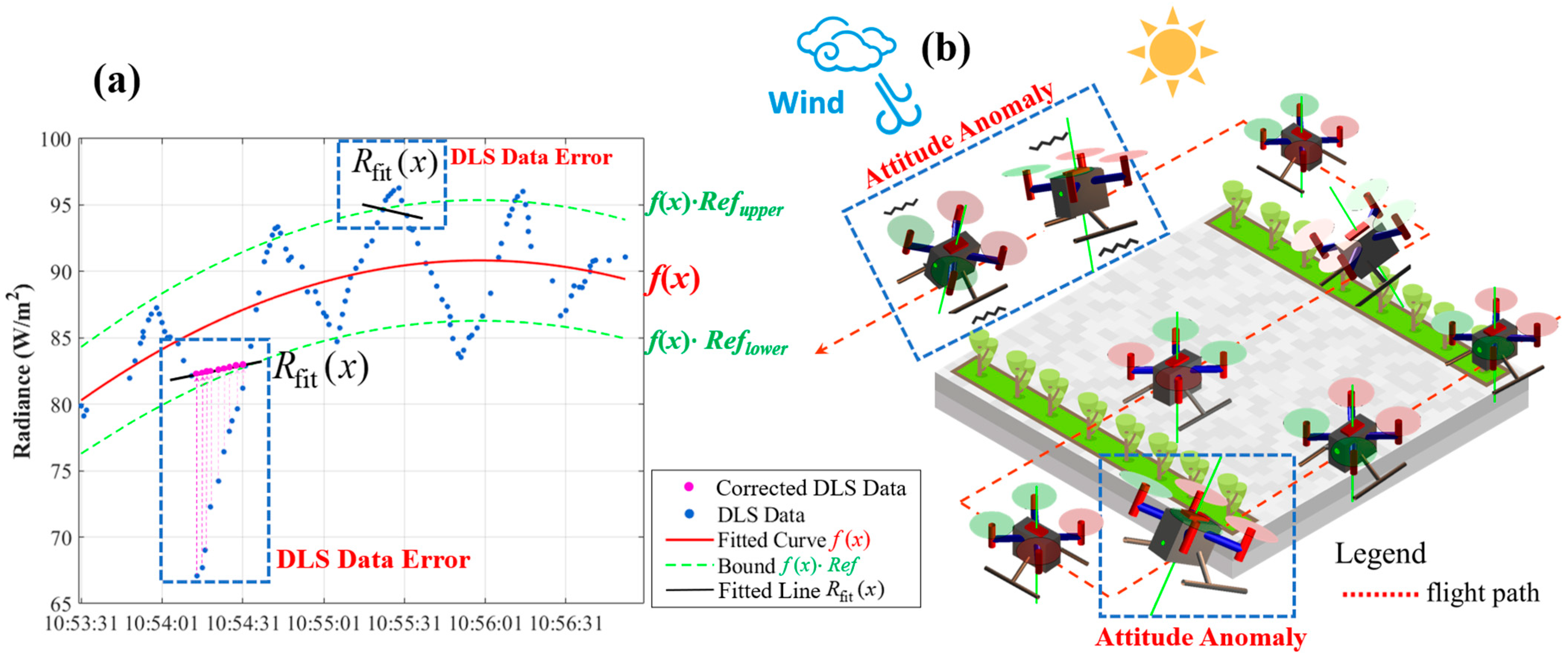
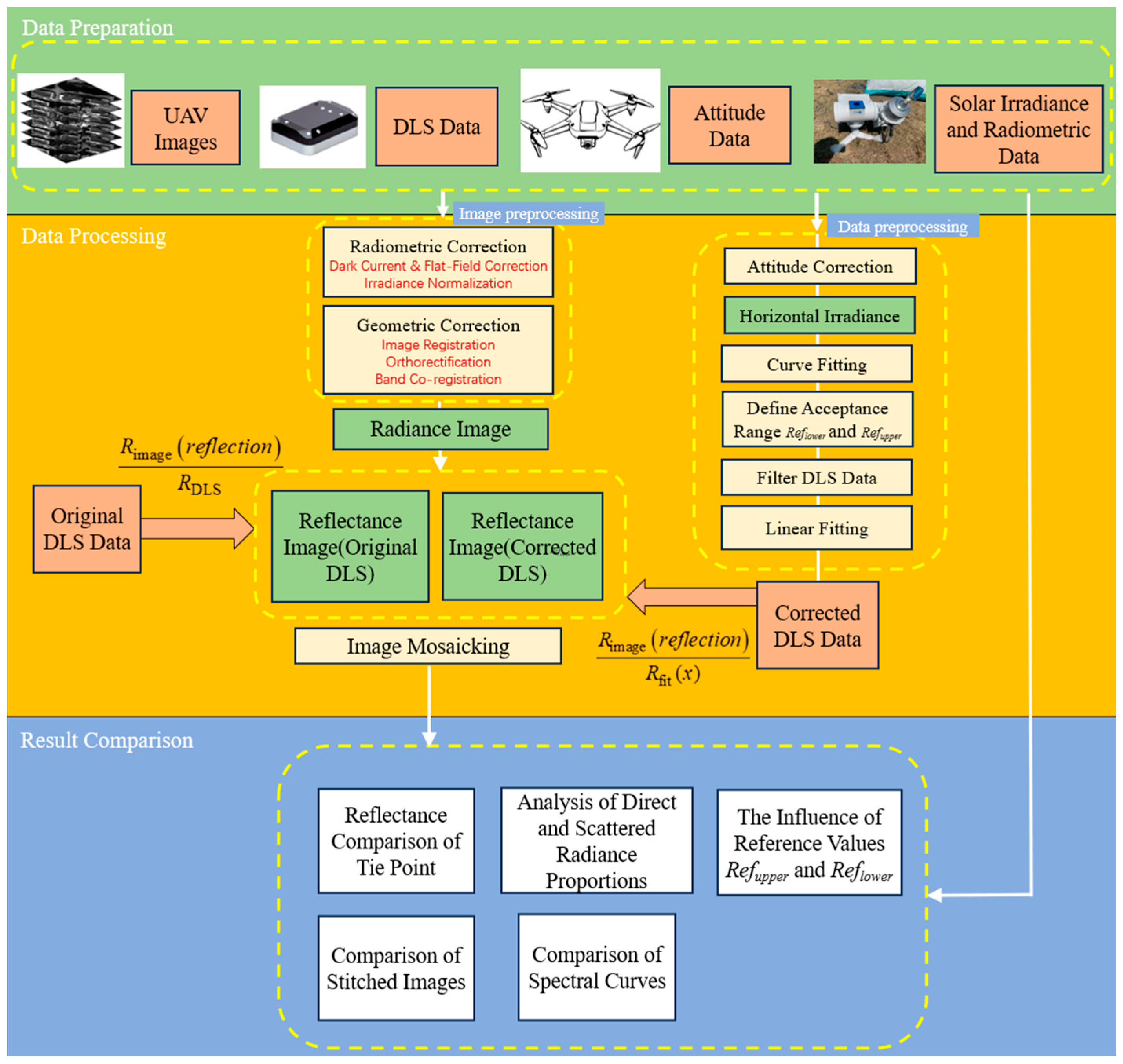
2.1. Construction of FIM-DC
2.2. Experimental Procedure
3. Experiments
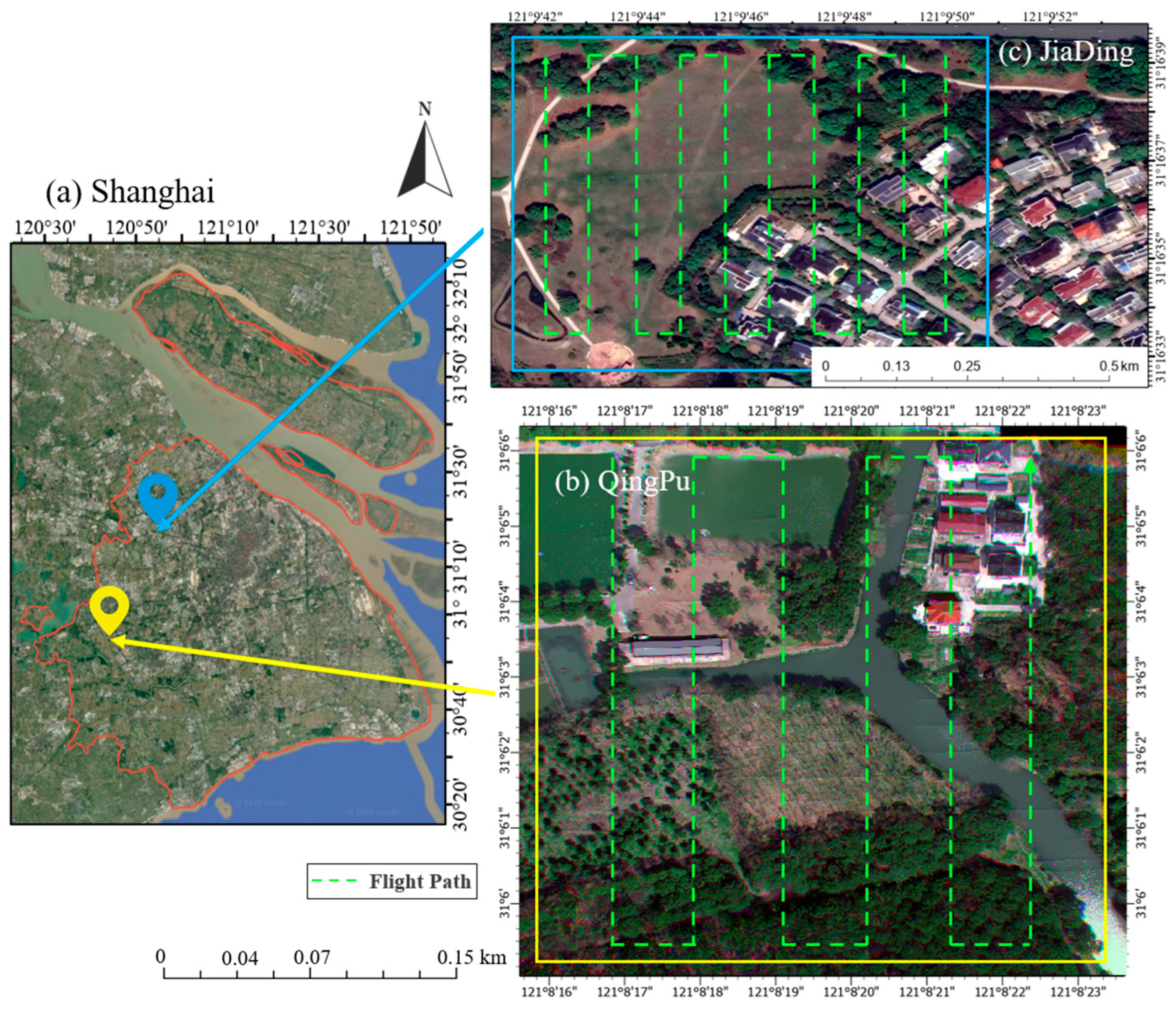
3.1. Experimental Design
3.2. Experimental Equipment
4. Results
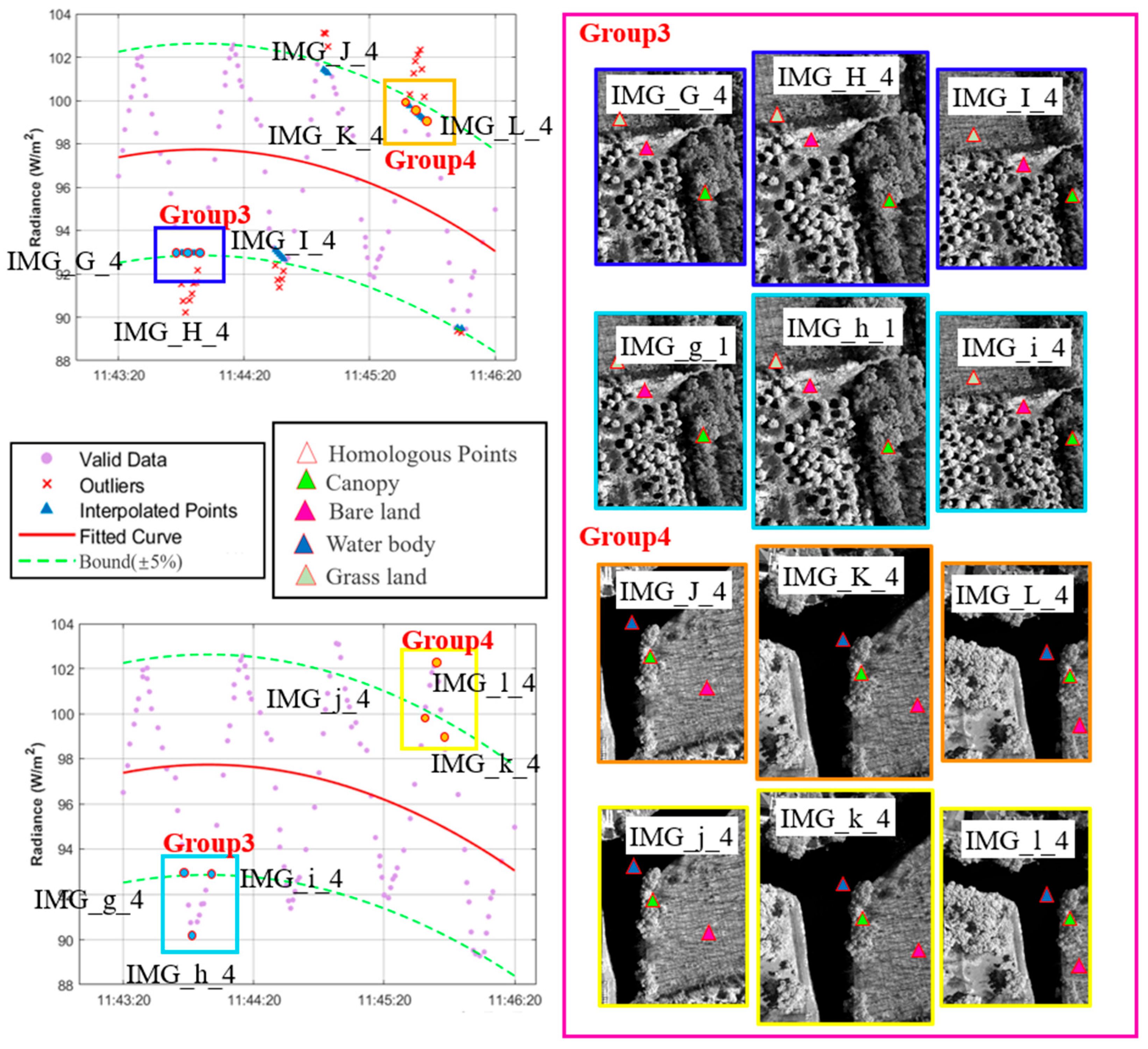
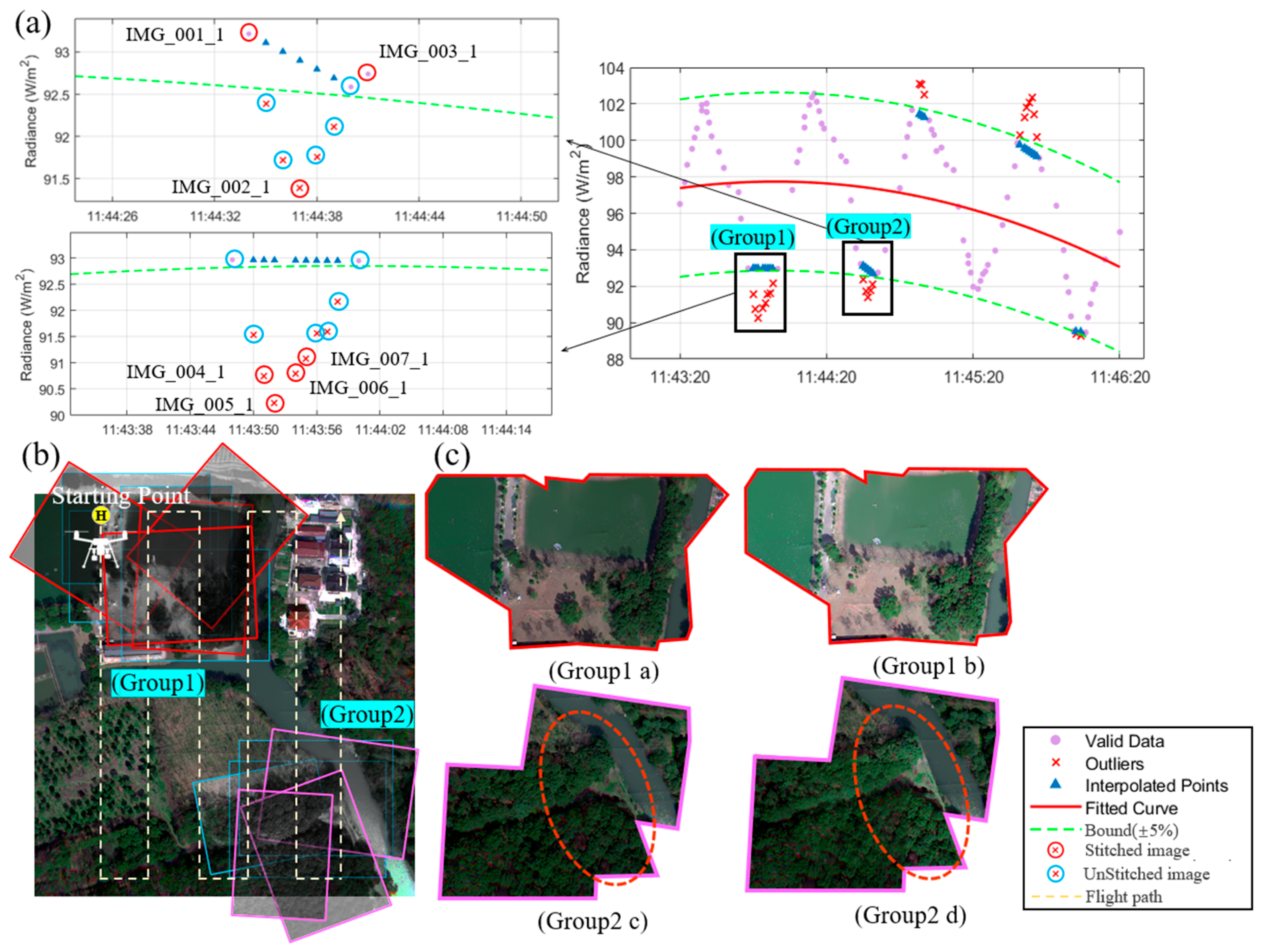
4.1. Tie Point Reflectance Comparison Between Adjacent Images
4.2. Comparison of Stitched Images
5. Discussion
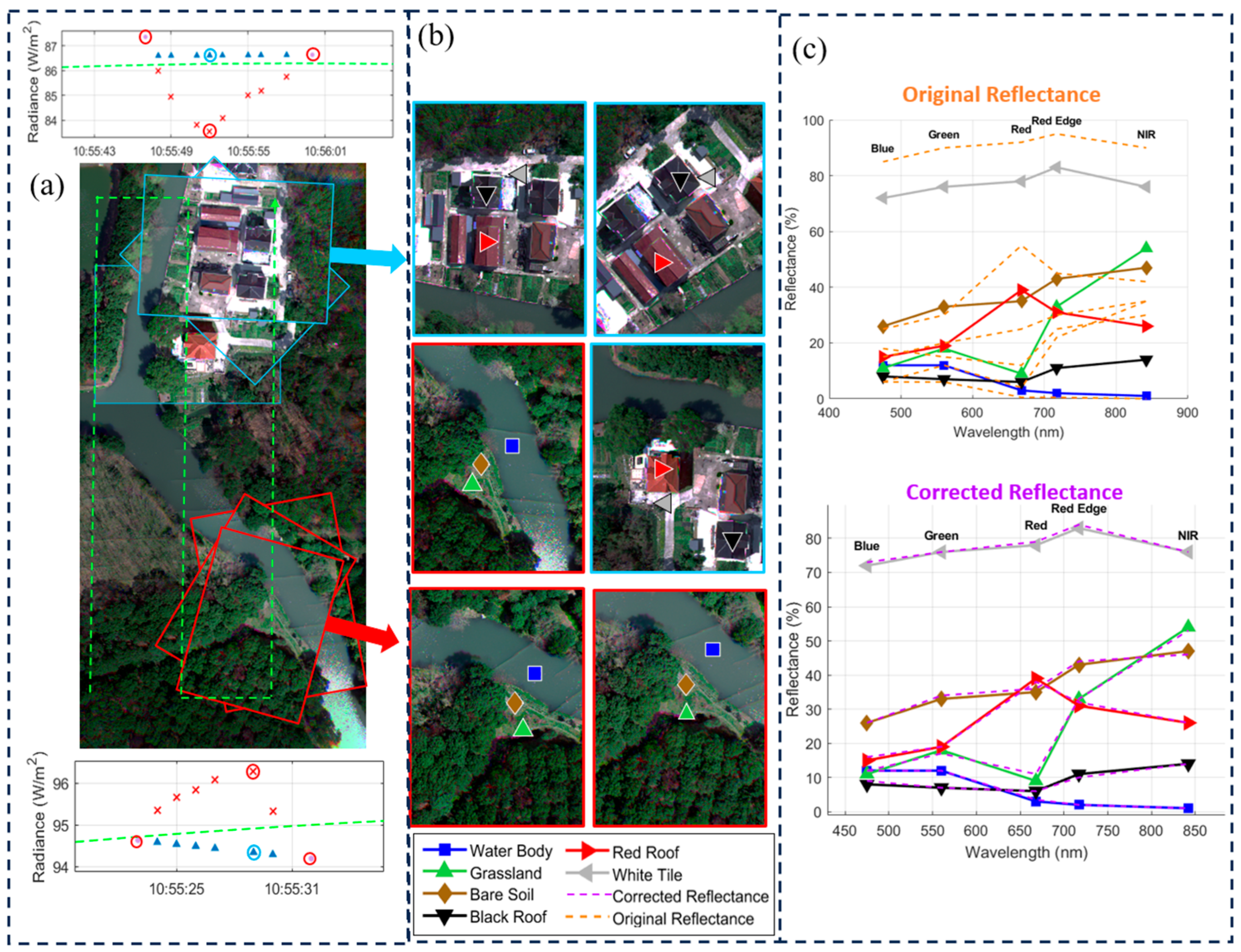
5.1. Comparison of Spectral Curves of Tie Points
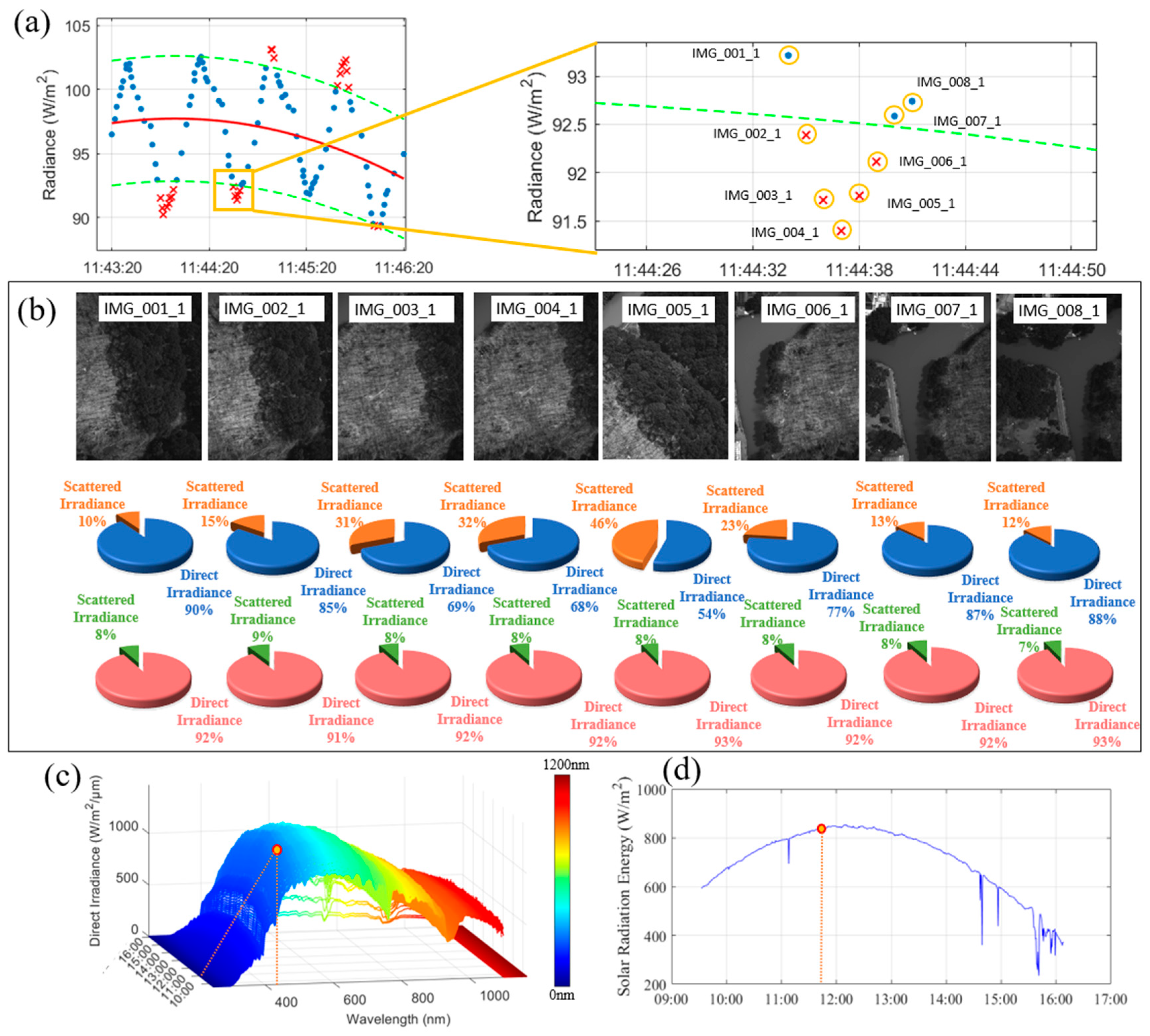
5.2. Analysis of Direct and Scattered Radiation Proportions in DLS Data
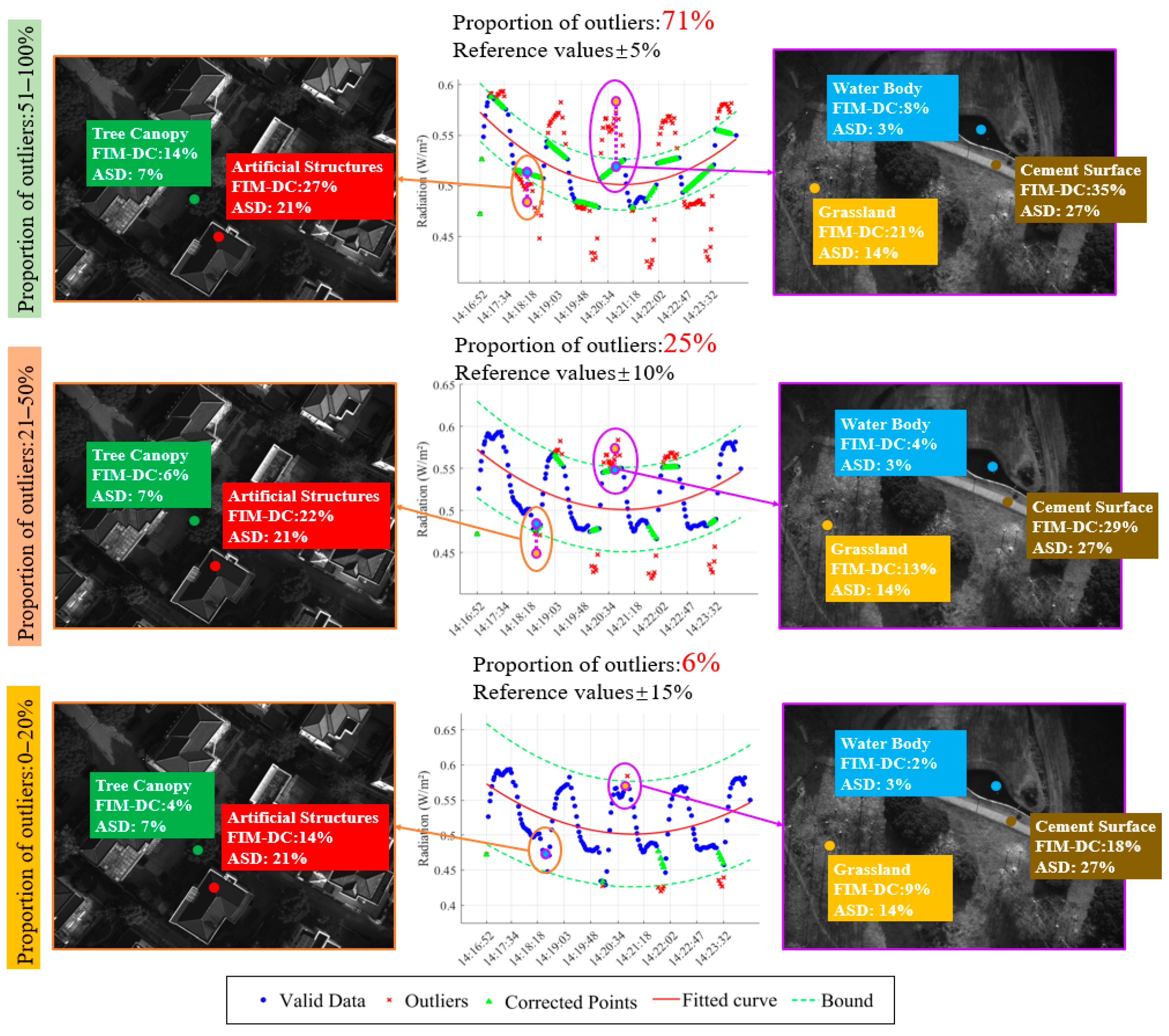
5.3. The Influence of Reference Values on the Model
6. Conclusions
- Improved Reflectance Consistency: FIM-DC significantly reduced the standard deviation of reflectance at tie points across multiple spectral bands, with the most notable improvement decreasing from 15.07% to 0.58%, ensuring superior radiometric consistency in DOMs.
- Effective Anomaly Correction: The method successfully eliminated abrupt fluctuations in DLS data caused by UAV attitude anomalies, achieving seamless mosaicking of large-area reflectance DOMs.
- Radiation Component Analysis: Through detailed examination of direct and scattered radiation proportions, the study identified the root causes of DLS anomalies during UAV maneuvers, providing critical insights for sensor optimization.
- Spectral Performance: FIM-DC accurately corrected spectral curves for six land cover types, reducing reflectance discrepancies by up to 15% in key spectral bands between anomalous and normal images.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Román, A.; Tovar-Sánchez, A.; Olivé, I.; Navarro, G. Using a UAV-Mounted Multispectral Camera for the Monitoring of Marine Macrophytes. Front. Mar. Sci. 2021, 8, 722698. [Google Scholar] [CrossRef]
- Swaminathan, V.; Thomasson, J.A.; Hardin, R.G.; Rajan, N.; Raman, R. Radiometric Calibration of UAV Multispectral Images under Changing Illumination Conditions with a Downwelling Light Sensor. Plant Phenome J. 2024, 7, e70005. [Google Scholar] [CrossRef]
- Hakala, T.; Markelin, L.; Honkavaara, E.; Scott, B.; Theocharous, T.; Nevalainen, O.; Näsi, R.; Suomalainen, J.; Viljanen, N.; Greenwell, C.; et al. Direct Reflectance Measurements from Drones: Sensor Absolute Radiometric Calibration and System Tests for Forest Reflectance Characterization. Sensors 2018, 18, 1417. [Google Scholar] [CrossRef]
- Zhao, F.; Sun, R.; Zhong, L.; Meng, R.; Huang, C.; Zeng, X.; Wang, M.; Li, Y.; Wang, Z. Monthly Mapping of Forest Harvesting Using Dense Time Series Sentinel-1 SAR Imagery and Deep Learning. Remote Sens. Environ. 2022, 269, 112822. [Google Scholar] [CrossRef]
- Hunt, E.R.; Stern, A.J. Evaluation of Incident Light Sensors on Unmanned Aircraft for Calculation of Spectral Reflectance. Remote Sens. 2019, 11, 2622. [Google Scholar] [CrossRef]
- Liu, Y.; Shan, Y.; Ying, H.; Wala, D.; Zhang, X.; Ruhan, A.; Rina, S.; Rina, S. Examining the Angular Effects of UAV-LS on Vegetation Metrics Using a Framework for Mediating Effects. Forests 2022, 13, 1221. [Google Scholar] [CrossRef]
- Daniels, L.; Eeckhout, E.; Wieme, J.; Dejaegher, Y.; Audenaert, K.; Maes, W.H. Identifying the Optimal Radiometric Calibration Method for UAV-Based Multispectral Imaging. Remote Sens. 2023, 15, 2909. [Google Scholar] [CrossRef]
- Cottrell, B.; Kalacska, M.; Arroyo-Mora, J.-P.; Lucanus, O.; Inamdar, D.; Løke, T.; Soffer, R.J. Limitations of a Multispectral UAV Sensor for Satellite Validation and Mapping Complex Vegetation. Remote Sens. 2024, 16, 2463. [Google Scholar] [CrossRef]
- Lu, H.; Fan, T.; Ghimire, P.; Deng, L. Experimental Evaluation and Consistency Comparison of UAV Multispectral Minisensors. Remote Sens. 2020, 12, 2542. [Google Scholar] [CrossRef]
- Suomalainen, J.; Hakala, T.; Alves De Oliveira, R.; Markelin, L.; Viljanen, N.; Näsi, R.; Honkavaara, E. A Novel Tilt Correction Technique for Irradiance Sensors and Spectrometers On-Board Unmanned Aerial Vehicles. Remote Sens. 2018, 10, 2068. [Google Scholar] [CrossRef]
- Sekrecka, A.; Wierzbicki, D.; Kedzierski, M. Influence of the Sun Position and Platform Orientation on the Quality of Imagery Obtained from Unmanned Aerial Vehicles. Remote Sens. 2020, 12, 1040. [Google Scholar] [CrossRef]
- Stow, D.; Nichol, C.; Wade, T.; Assmann, J.; Simpson, G.; Helfter, C. Illumination Geometry and Flying Height Influence Surface Reflectance and NDVI Derived from Multispectral UAS Imagery. Drones 2019, 3, 55. [Google Scholar] [CrossRef]
- James, M.R.; Robson, S. Mitigating Systematic Error in Topographic Models Derived from UAV and Ground-based Image Networks. Earth Surf. Process. Landf. 2014, 39, 1413–1420. [Google Scholar] [CrossRef]
- Turner, D.; Lucieer, A.; Watson, C. An Automated Technique for Generating Georectified Mosaics from Ultra-High Resolution Unmanned Aerial Vehicle (UAV) Imagery, Based on Structure from Motion (SfM) Point Clouds. Remote Sens. 2012, 4, 1392–1410. [Google Scholar] [CrossRef]
- Simon, N.; Ren, A.Z.; Piqué, A.; Snyder, D.; Barretto, D.; Hultmark, M.; Majumdar, A. FlowDrone: Wind Estimation and Gust Rejection on UAVs Using Fast-Response Hot-Wire Flow Sensors. In Proceedings of the 2023 IEEE International Conference on Robotics and Automation (ICRA), London, UK, 29 May–2 June 2023. [Google Scholar]
- Jung, S. Precision Landing of Unmanned Aerial Vehicle under Wind Disturbance Using Derivative Sliding Mode Nonlinear Disturbance Observer-Based Control Method. Aerospace 2024, 11, 265. [Google Scholar] [CrossRef]
- Köppl, C.J.; Malureanu, R.; Dam-Hansen, C.; Wang, S.; Jin, H.; Barchiesi, S.; Serrano Sandí, J.M.; Muñoz-Carpena, R.; Johnson, M.; Durán-Quesada, A.M.; et al. Hyperspectral Reflectance Measurements from UAS under Intermittent Clouds: Correcting Irradiance Measurements for Sensor Tilt. Remote Sens. Environ. 2021, 267, 112719. [Google Scholar] [CrossRef]
- Reineman, B.D.; Lenain, L.; Statom, N.M.; Melville, W.K. Development and Testing of Instrumentation for UAV-Based Flux Measurements within Terrestrial and Marine Atmospheric Boundary Layers. J. Atmos. Ocean. Technol. 2013, 30, 1295–1319. [Google Scholar] [CrossRef]
- Deng, L.; Hao, X.; Mao, Z.; Yan, Y.; Sun, J.; Zhang, A. A Subband Radiometric Calibration Method for UAV-Based Multispectral Remote Sensing. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 2869–2880. [Google Scholar] [CrossRef]
- Xue, B.; Ming, B.; Xin, J.; Yang, H.; Gao, S.; Guo, H.; Feng, D.; Nie, C.; Wang, K.; Li, S. Radiometric Correction of Multispectral Field Images Captured under Changing Ambient Light Conditions and Applications in Crop Monitoring. Drones 2023, 7, 223. [Google Scholar] [CrossRef]
- Wang, Y.; Yang, Z.; Khan, H.A.; Kootstra, G. Improving Radiometric Block Adjustment for UAV Multispectral Imagery under Variable Illumination Conditions. Remote Sens. 2024, 16, 3019. [Google Scholar] [CrossRef]
- Meier, K.; Hann, R.; Skaloud, J.; Garreau, A. Wind Estimation with Multirotor UAVs. Atmosphere 2022, 13, 551. [Google Scholar] [CrossRef]
- Wilson, T.C.; Brenner, J.; Morrison, Z.; Jacob, J.D.; Elbing, B.R. Wind Speed Statistics from a Small UAS and Its Sensitivity to Sensor Location. Atmosphere 2022, 13, 443. [Google Scholar] [CrossRef]
- Palomaki, R.T.; Rose, N.T.; Van Den Bossche, M.; Sherman, T.J.; De Wekker, S.F.J. Wind Estimation in the Lower Atmosphere Using Multirotor Aircraft. J. Atmos. Ocean. Technol. 2017, 34, 1183–1191. [Google Scholar] [CrossRef]
- LaForest, L.; Hasheminasab, S.M.; Zhou, T.; Flatt, J.E.; Habib, A. New Strategies for Time Delay Estimation during System Calibration for UAV-Based GNSS/INS-Assisted Imaging Systems. Remote Sens. 2019, 11, 1811. [Google Scholar] [CrossRef]
- He, X.; Zhang, X.; Tang, L.; Liu, W. Instantaneous Real-Time Kinematic Decimeter-Level Positioning with BeiDou Triple-Frequency Signals over Medium Baselines. Sensors 2015, 16, 1. [Google Scholar] [CrossRef] [PubMed]
- Zhukov, I.; Dolintse, B.; Balakin, S. Enhancing Data Processing Methods to Improve UAV Positioning Accuracy. Int. J. Image Graph. Signal Process. 2024, 16, 100–110. [Google Scholar] [CrossRef]
- Bramati, M.; Schön, M.; Schulz, D.; Savvakis, V.; Wang, Y.; Bange, J.; Platis, A. A Versatile Calibration Method for Rotary-Wing UAS as Wind Measurement Systems. J. Atmos. Ocean. Technol. 2024, 41, 25–43. [Google Scholar] [CrossRef]
- Yang, Y.; Kim, S.; Lee, K.; Leeghim, H. Disturbance Robust Attitude Stabilization of Multirotors with Control Moment Gyros. Sensors 2024, 24, 8212. [Google Scholar] [CrossRef]
- Chiang, K.-W.; Tsai, M.-L.; Naser, E.-S.; Habib, A.; Chu, C.-H. New Calibration Method Using Low Cost MEM IMUs to Verify the Performance of UAV-Borne MMS Payloads. Sensors 2015, 15, 6560–6585. [Google Scholar] [CrossRef]
- Xie, J.; Shen, Y.; Cen, H. Real-Time Reflectance Generation for UAV Multispectral Imagery Using an Onboard Downwelling Spectrometer in Varied Weather Conditions. arXiv 2024, arXiv:2412.19527. [Google Scholar]
- Paul, S.; Nagesh Kumar, D. Spectral-Spatial Classification of Hyperspectral Data with Mutual Information Based Segmented Stacked Autoencoder Approach. ISPRS J. Photogramm. Remote Sens. 2018, 138, 265–280. [Google Scholar] [CrossRef]
- D’Amico, S.; Ardaens, J.-S.; Gaias, G.; Benninghoff, H.; Schlepp, B.; Jørgensen, J.L. Noncooperative Rendezvous Using Angles-Only Optical Navigation: System Design and Flight Results. J. Guid. Control Dyn. 2013, 36, 1576–1595. [Google Scholar] [CrossRef]
- Xu, L.; Cai, Z.; Wang, Y.; Shen, Z. The Control Method of a Quadrotor Driven by Bidirectional Electronic Speed Controllers. Sci. Rep. 2024, 14, 19532. [Google Scholar] [CrossRef]
- Torrente, G.; Kaufmann, E.; Fohn, P.; Scaramuzza, D. Data-Driven MPC for Quadrotors. IEEE Robot. Autom. Lett. 2021, 6, 3769–3776. [Google Scholar] [CrossRef]
- Smith, M.W.; Carrivick, J.L.; Quincey, D.J. Structure from Motion Photogrammetry in Physical Geography. Prog. Phys. Geogr. Earth Environ. 2016, 40, 247–275. [Google Scholar] [CrossRef]
- Yue, J.; Lei, T.; Li, C.; Zhu, J. The Application of Unmanned Aerial Vehicle Remote Sensing in Quickly Monitoring Crop Pests. Intell. Autom. Soft Comput. 2012, 18, 1043–1052. [Google Scholar] [CrossRef]
- Zhang, R.; Hewitt, A.; Li, L.; Yuan, H.; Ferguson, J.C.; Chen, L. Editorial: Advanced Technologies of UAV Application in Crop Pest, Disease and Weed Control. Front. Plant Sci. 2023, 14, 1253841. [Google Scholar] [CrossRef] [PubMed]
- Miller, J.K.; Dean, R.G. A Simple New Shoreline Change Model. Coast. Eng. 2004, 51, 531–556. [Google Scholar] [CrossRef]
- Polat, N.; Memduhoğlu, A. Assessing Spatiotemporal LST Variations in Urban Landscapes Using Diurnal UAV Thermography. Appl. Sci. 2025, 15, 3448. [Google Scholar] [CrossRef]
- Navarro-Gutiérrez, M.; Ramírez-Treviño, A.; Silva, M. Fluid Net Models: From Behavioral Properties to Structural Objects. Appl. Sci. 2022, 12, 6123. [Google Scholar] [CrossRef]
- Shin, H.J.; Park, J.; Lee, J.S. Syllable-Based Multi-POSMORPH Annotation for Korean Morphological Analysis and Part-of-Speech Tagging. Appl. Sci. 2023, 13, 2892. [Google Scholar] [CrossRef]
- Zhu, S.; Guan, H.; Millington, A.C.; Zhang, G. Disaggregation of Land Surface Temperature over a Heterogeneous Urban and Surrounding Suburban Area: A Case Study in Shanghai, China. Int. J. Remote Sens. 2013, 34, 1707–1723. [Google Scholar] [CrossRef]
- Zakšek, K.; Oštir, K. Downscaling Land Surface Temperature for Urban Heat Island Diurnal Cycle Analysis. Remote Sens. Environ. 2012, 117, 114–124. [Google Scholar] [CrossRef]
- Rodrigues De Almeida, C.; Garcia, N.; Campos, J.C.; Alírio, J.; Arenas-Castro, S.; Gonçalves, A.; Sillero, N.; Teodoro, A.C. Time-Series Analyses of Land Surface Temperature Changes with Google Earth Engine in a Mountainous Region. Heliyon 2023, 9, e18846. [Google Scholar] [CrossRef] [PubMed]
- Hochreiter, S.; Schmidhuber, J. Long Short-Term Memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef]
- Tamiminia, H.; Salehi, B.; Mahdianpari, M.; Quackenbush, L.; Adeli, S.; Brisco, B. Google Earth Engine for Geo-Big Data Applications: A Meta-Analysis and Systematic Review. ISPRS J. Photogramm. Remote Sens. 2020, 164, 152–170. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | QingPu Experiment | JiaDing Experiment |
|---|---|---|
| Area (ha) | 8.6 | 14 |
| Flight Overlap Rate (%) | 85 | 85 |
| Sidelap Rate (%) | 80 | 80 |
| Flight Altitude (m) | 110 | 110 |
| MS-711 Spectroradiometer | Main Parameters |
|---|---|
| Wavelength Range | 300–1100 nm |
| Optical Resolution (FWHM) | <7 nm |
| Wavelength Accuracy | ±0.2 nm |
| Cosine Response (0–80°) | <5% |
| Exposure Time | 10 ms to 5 s |
| Field of View (FOV) | 180° |
| Dimensions and Weight | 220 mm × 197 mm, approximately 4.5 kg |
| Altum-pt multispectral camera | Main parameters |
| Field of View | 46° HFOV × 35° VFOV |
| Ground Resolution | 5.28 cm perpixel at 120 m |
| Image Resolution | 2064 × 1544 |
| Blue band | 475 ± 32 nm |
| Green band | 560 ± 27 nm |
| Red band | 668 ± 14 nm |
| Red Edge | 717 ± 12 nm |
| Near-Infrared (NIR) | 842 ± 57 nm |
| Panchromatic | 634.5 ± 463 nm |
| Group 1 | |||
| Canopy | Bare Land | ||
| IMG_A_1 | 13% | 32% | |
| IMG_B_1 | 13% | 31% | |
| IMG_C_1 | 14% | 32% | |
| IMG_a_1 | 13% | 32% | |
| IMG_b_1 | 43% | 62% | |
| IMG_c_1 | 35% | 51% | |
| Group 2 | |||
| Canopy | Water body | Cement road | |
| IMG_D_1 | 15% | 5% | 45% |
| IMG_E_1 | 15% | 6% | 45% |
| IMG_F_1 | 14% | 6% | 45% |
| IMG_d_1 | 15% | 5% | 45% |
| IMG_e_1 | 11% | 2% | 37% |
| IMG_f_1 | 14% | 6% | 45% |
| Group 3 | |||
| Canopy | Bare Land | Grass Land | |
| IMG_A_4 | 33% | 29% | 45% |
| IMG_B_4 | 33% | 29% | 47% |
| IMG_C_4 | 32% | 28% | 46% |
| IMG_a_4 | 33% | 29% | 45% |
| IMG_b_4 | 45% | 36% | 52% |
| IMG_C_4 | 32% | 28% | 46% |
| Group 4 | |||
| Canopy | Water body | Bare land | |
| IMG_D_4 | 35% | 5% | 35% |
| IMG_E_4 | 35% | 4% | 34% |
| IMG_F_4 | 37% | 4% | 33% |
| IMG_d_4 | 35% | 5% | 35% |
| IMG_e_4 | 26% | 2% | 24% |
| IMG_f_4 | 37% | 4% | 33% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, S.; Lu, Y.; Fan, W.; Zhang, S.; Wu, Z.; Wang, F. An Efficient Downwelling Light Sensor Data Correction Model for UAV Multi-Spectral Image DOM Generation. Drones 2025, 9, 491. https://doi.org/10.3390/drones9070491
Wu S, Lu Y, Fan W, Zhang S, Wu Z, Wang F. An Efficient Downwelling Light Sensor Data Correction Model for UAV Multi-Spectral Image DOM Generation. Drones. 2025; 9(7):491. https://doi.org/10.3390/drones9070491
Chicago/Turabian StyleWu, Siyao, Yanan Lu, Wei Fan, Shengmao Zhang, Zuli Wu, and Fei Wang. 2025. "An Efficient Downwelling Light Sensor Data Correction Model for UAV Multi-Spectral Image DOM Generation" Drones 9, no. 7: 491. https://doi.org/10.3390/drones9070491
APA StyleWu, S., Lu, Y., Fan, W., Zhang, S., Wu, Z., & Wang, F. (2025). An Efficient Downwelling Light Sensor Data Correction Model for UAV Multi-Spectral Image DOM Generation. Drones, 9(7), 491. https://doi.org/10.3390/drones9070491