


An Efficient Autonomous Exploration Framework for Autonomous Vehicles in Uneven Off-Road Environments


Abstract
1. Introduction
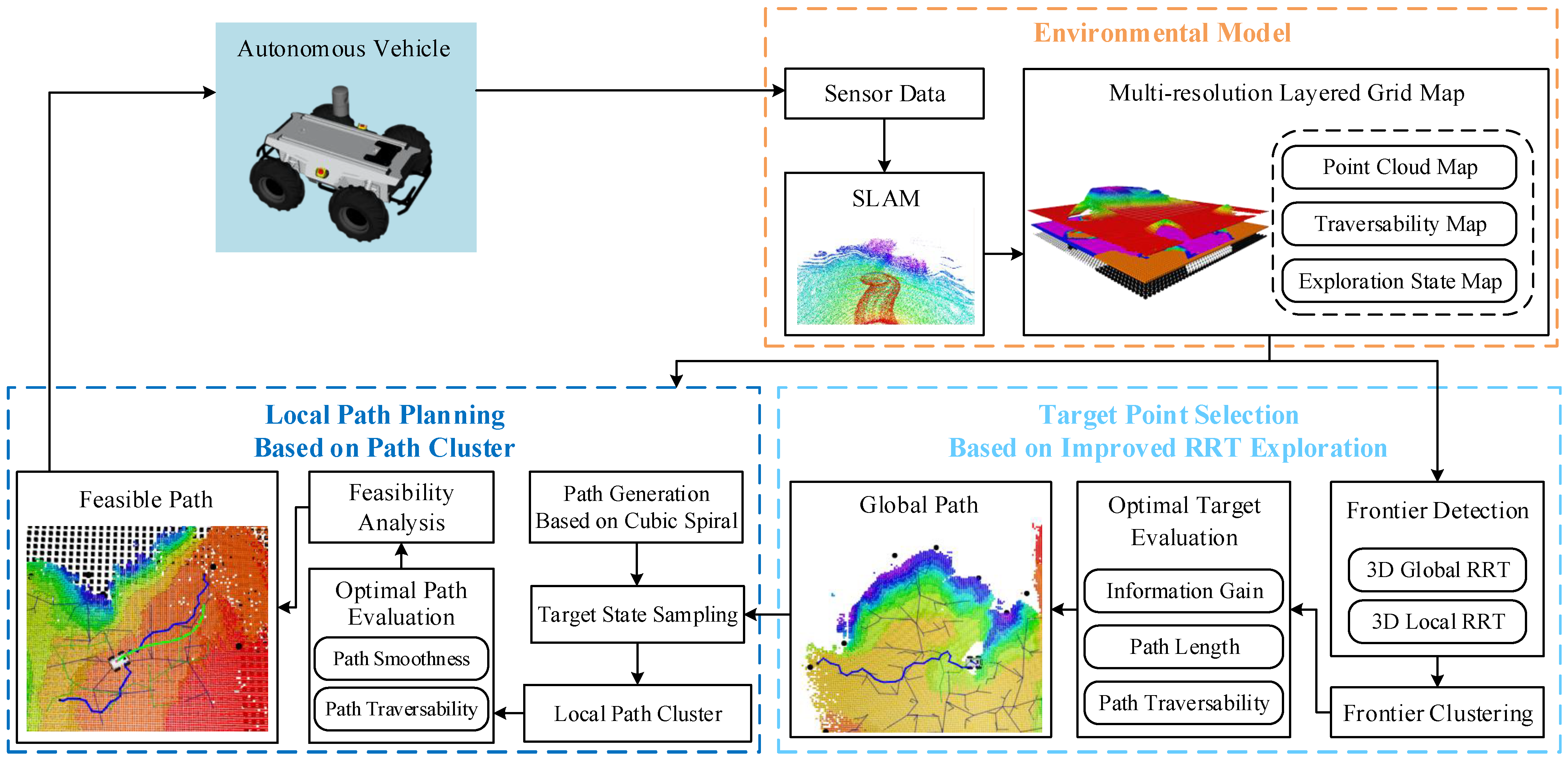
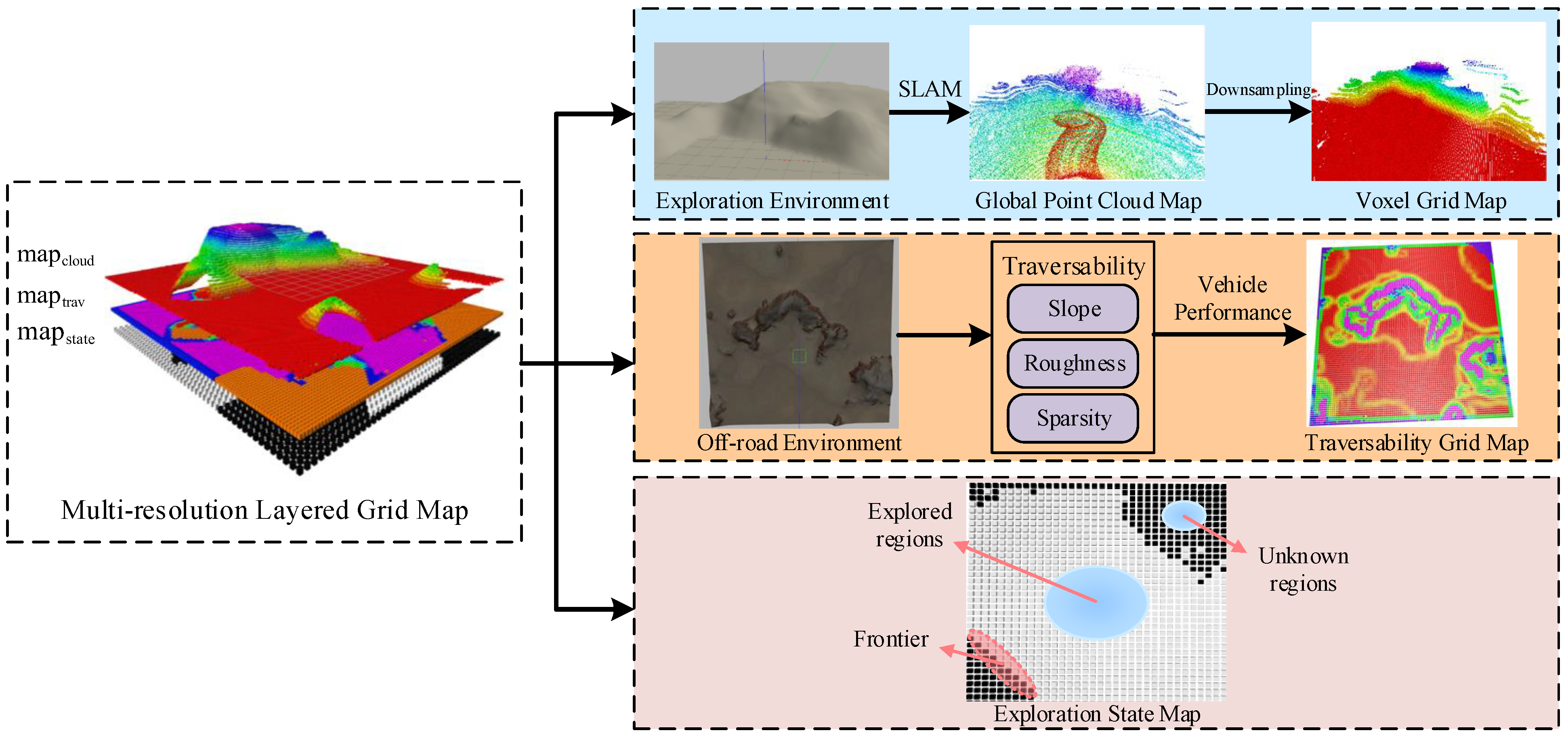
- A multi-resolution layered map serves as the environmental model for exploration, storing environmental information at various resolutions for efficient storage resource allocation.
- A target selection strategy that considers terrain traversability analysis ensures the accessibility of the target within 3D uneven off-road environments. Furthermore, we determine the optimal target by integrating information gain with a more precise navigation cost.
- A local path planner integrates path traversability to select the optimal local path from the smooth candidate paths, ensuring that the local path is optimally suited for the vehicle’s traversal while meeting kinematic constraints and enhancing exploration efficiency and the vehicle’s safety in off-road environments.
2. Related Work
2.1. Methods of Autonomous Exploration
2.2. Autonomous Exploration in 3D Environments
3. Problem Definition
4. Methodology
4.1. Environmental Model Construction
4.2. Target Selection
4.2.1. Frontier Detection
| Algorithm 1: 3D Local RRT Frontier Detector |
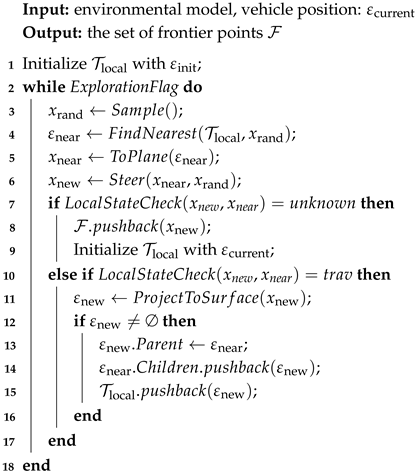 |
4.2.2. Frontier Clustering
4.2.3. Optimal Target Evaluation
| Algorithm 2: 3D Road Map Construction |
 |
4.3. Local Path Planning
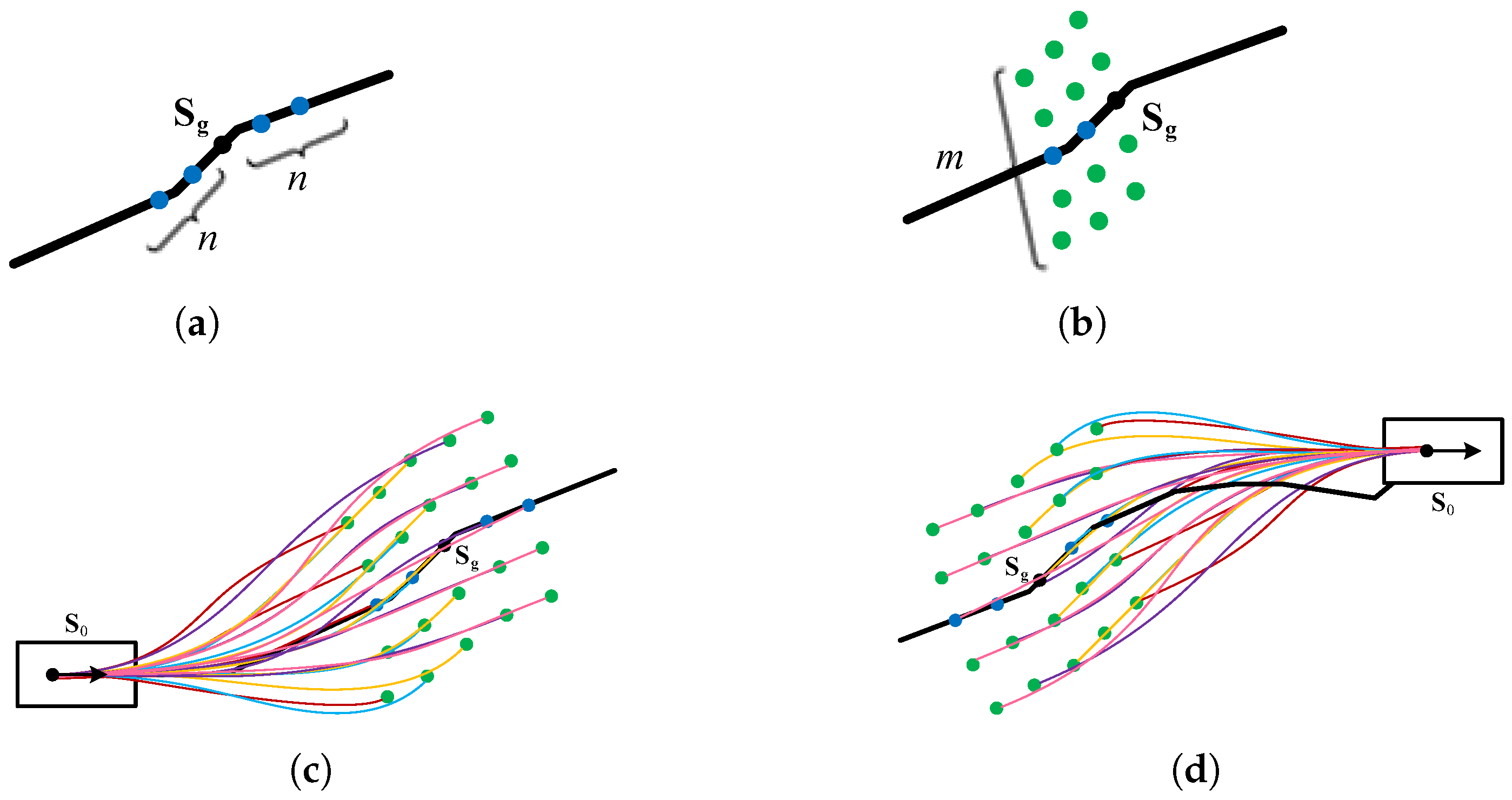
4.3.1. Method for Path Generation
4.3.2. Optimal Local Path Evaluation
5. Experiments
5.1. Implementation Details
5.2. Simulation and Analysis
5.3. Real-World Tests
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhang, X.; Wang, J.; Wang, S.; Wang, M.; Wang, T.; Feng, Z.; Zhu, S.; Zheng, E. FAEM: Fast Autonomous Exploration for UAV in Large-Scale Unknown Environments Using LiDAR-Based Mapping. Drones 2025, 9, 423. [Google Scholar] [CrossRef]
- Qi, C.; Ma, T.; Li, Y.; Ling, Y.; Liao, Y.; Jiang, Y. A Multi-AUV Collaborative Mapping System with Bathymetric Cooperative Active SLAM Algorithm. IEEE Internet Things J. 2025, 12, 12441–12452. [Google Scholar] [CrossRef]
- Zhou, Z.; Chen, Y.; Yu, J.; Zu, B.; Wang, Q.; Zhou, X.; Duan, J. Mars Exploration: Research on Goal-Driven Hierarchical DQN Autonomous Scene Exploration Algorithm. Aerospace 2024, 11, 692. [Google Scholar] [CrossRef]
- Niroui, F.; Zhang, K.; Kashino, Z.; Nejat, G. Deep Reinforcement Learning Robot for Search and Rescue Applications: Exploration in Unknown Cluttered Environments. IEEE Robot. Autom. Lett. 2019, 4, 610–617. [Google Scholar] [CrossRef]
- Cao, Z.; Du, Z.; Yang, J. Topological Map-Based Autonomous Exploration in Large-Scale Scenes for Unmanned Vehicles. Drones 2024, 8, 124. [Google Scholar] [CrossRef]
- Wang, K.; Wang, M.; Wang, R.; Zhai, C.; Song, W. Traversability Estimation for Off-Road Autonomous Driving Under Ego-Motion Uncertainty. IEEE Sens. J. 2024, 24, 6584–6596. [Google Scholar] [CrossRef]
- Jiang, J.; Hu, Z.; Xie, Z.; Hao, C.; Liu, H.; Xu, W.; Kong, Z.; Wang, Y.; He, L.; Xu, S.; et al. A Risk-Aware Planning Framework of UGVs in Off-Road Environment. IEEE Trans. Veh. Technol. 2025, 74, 3870–3884. [Google Scholar] [CrossRef]
- Chen, Y.; Wang, R.; Qu, Y.; Yan, C.; Song, W. GRRL: Goal-Guided Risk-Inspired Reinforcement Learning for Efficient Autonomous Driving in Off-Road Environment. In Proceedings of the 2024 China Automation Congress (CAC), Qingdao, China, 1–3 November 2024; pp. 2496–2501. [Google Scholar] [CrossRef]
- Lee, J.; Kurisu, M.; Kuriyama, K. Three-dimensionalized feature-based LiDAR-visual odometry for online mapping of unpaved road surfaces. J. Field Robot. 2024, 41, 1452–1468. [Google Scholar] [CrossRef]
- Umari, H.; Mukhopadhyay, S. Autonomous robotic exploration based on multiple rapidly-exploring randomized trees. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 1396–1402. [Google Scholar] [CrossRef]
- Ahmed, M.F.; Masood, K.; Fremont, V.; Fantoni, I. Active SLAM: A Review on Last Decade. Sensors 2023, 23, 8097. [Google Scholar] [CrossRef]
- Cao, Y.; Zhao, R.; Wang, Y.; Xiang, B.; Sartoretti, G. Deep Reinforcement Learning-Based Large-Scale Robot Exploration. IEEE Robot. Autom. Lett. 2024, 9, 4631–4638. [Google Scholar] [CrossRef]
- Huang, J.; Fan, Z.; Yan, Z.; Duan, P.; Mei, R.; Cheng, H. Efficient UAV Exploration for Large-Scale 3D Environments Using Low-Memory Map. Drones 2024, 8, 443. [Google Scholar] [CrossRef]
- Liu, J.; Lv, Y.; Yuan, Y.; Chi, W.; Chen, G.; Sun, L. An Efficient Robot Exploration Method Based on Heuristics Biased Sampling. IEEE Trans. Ind. Electron. 2023, 70, 7102–7112. [Google Scholar] [CrossRef]
- Respall, V.M.; Devitt, D.; Fedorenko, R.; Klimchik, A. Fast Sampling-based Next-Best-View Exploration Algorithm for a MAV. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021; pp. 89–95. [Google Scholar] [CrossRef]
- Yu, J.; Shen, H.; Xu, J.; Zhang, T. ECHO: An Efficient Heuristic Viewpoint Determination Method on Frontier-Based Autonomous Exploration for Quadrotors. IEEE Robot. Autom. Lett. 2023, 8, 5047–5054. [Google Scholar] [CrossRef]
- Dang, T.; Papachristos, C.; Alexis, K. Visual Saliency-Aware Receding Horizon Autonomous Exploration with Application to Aerial Robotics. In Proceedings of the International Conference on Robotics and Automation (ICRA), Brisbane, QLD, Australia, 21–25 May 2018; pp. 2526–2533. [Google Scholar] [CrossRef]
- Batinovic, A.; Petrovic, T.; Ivanovic, A.; Petric, F.; Bogdan, S. A Multi-Resolution Frontier-Based Planner for Autonomous 3D Exploration. IEEE Robot. Autom. Lett. 2021, 6, 4528–4535. [Google Scholar] [CrossRef]
- Zhou, B.; Zhang, Y.; Chen, X.; Shen, S. FUEL: Fast UAV Exploration Using Incremental Frontier Structure and Hierarchical Planning. IEEE Robot. Autom. Lett. 2021, 6, 779–786. [Google Scholar] [CrossRef]
- Duberg, D.; Jensfelt, P. UFOExplorer: Fast and Scalable Sampling-Based Exploration with a Graph-Based Planning Structure. IEEE Robot. Autom. Lett. 2022, 7, 2487–2494. [Google Scholar] [CrossRef]
- Cao, C.; Zhu, H.; Choset, H.; Zhang, J. TARE: A Hierarchical Framework for Efficiently Exploring Complex 3D Environments. In Proceedings of the Robotics: Science and Systems, Virtually, 12–16 July 2021. [Google Scholar] [CrossRef]
- Huang, J.; Zhou, B.; Fan, Z.; Zhu, Y.; Jie, Y.; Li, L.; Cheng, H. FAEL: Fast Autonomous Exploration for Large-scale Environments With a Mobile Robot. IEEE Robot. Autom. Lett. 2023, 8, 1667–1674. [Google Scholar] [CrossRef]
- Dang, T.; Tranzatto, M.; Khattak, S.; Mascarich, F.; Alexis, K.; Hutter, M. Graph-based subterranean exploration path planning using aerial and legged robots. J. Field Robot 2020, 37, 1363–1388. [Google Scholar] [CrossRef]
- Zhu, H.; Cao, C.; Xia, Y.; Scherer, S.; Zhang, J.; Wang, W. DSVP: Dual-Stage Viewpoint Planner for Rapid Exploration by Dynamic Expansion. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Prague, Czech Republic, 27 September–1 October 2021; pp. 7623–7630. [Google Scholar] [CrossRef]
- Chen, X.; Zheng, J.; Hu, Q. A Hybrid Planning Method for 3D Autonomous Exploration in Unknown Environments with a UAV. IEEE Trans. Autom. Sci. Eng. 2024, 21, 5713–5724. [Google Scholar] [CrossRef]
- Li, Y.; Debnath, A.; Stein, G.J.; Košecká, J. Learning-Augmented Model-Based Planning for Visual Exploration. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Detroit, MI, USA, 1–5 October 2023; pp. 5165–5171. [Google Scholar] [CrossRef]
- Tang, Y.; Cai, J.; Chen, M.; Yan, X.; Xie, Y. An autonomous exploration algorithm using environment-robot interacted traversability analysis. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 3–8 November 2019; pp. 4885–4890. [Google Scholar] [CrossRef]
- Jian, Z.; Lu, Z.; Zhou, X.; Lan, B.; Xiao, A.; Wang, X.; Liang, B. PUTN: A Plane-fitting based Uneven Terrain Navigation Framework. In Proceedings of the IEEE/RSJ nternational Conference on Intelligent Robots and Systems (IROS), Kyoto, Japan, 23–27 October 2022; pp. 7160–7166. [Google Scholar] [CrossRef]
- Tang, J.; Jiang, F.; Long, Y.; Fu, L.; Sun, H. Identification of the yield of camellia oleifera based on color space by the optimized mean shift clustering algorithm using terrestrial laser scanning. Remote Sens. 2022, 14, 642. [Google Scholar] [CrossRef]
- Wang, C.; Chi, W.; Sun, Y.; Meng, M.Q.H. Autonomous Robotic Exploration by Incremental Road Map Construction. IEEE Trans. Autom. Sci. Eng. 2019, 16, 1720–1731. [Google Scholar] [CrossRef]
- Qi, Y.; He, B.; Wang, R.; Wang, L.; Xu, Y. Hierarchical Motion Planning for Autonomous Vehicles in Unstructured Dynamic Environments. IEEE Robot. Autom. Lett. 2023, 8, 496–503. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Environment | Point Cloud Map | Exploration State Map | Traversability Map |
|---|---|---|---|
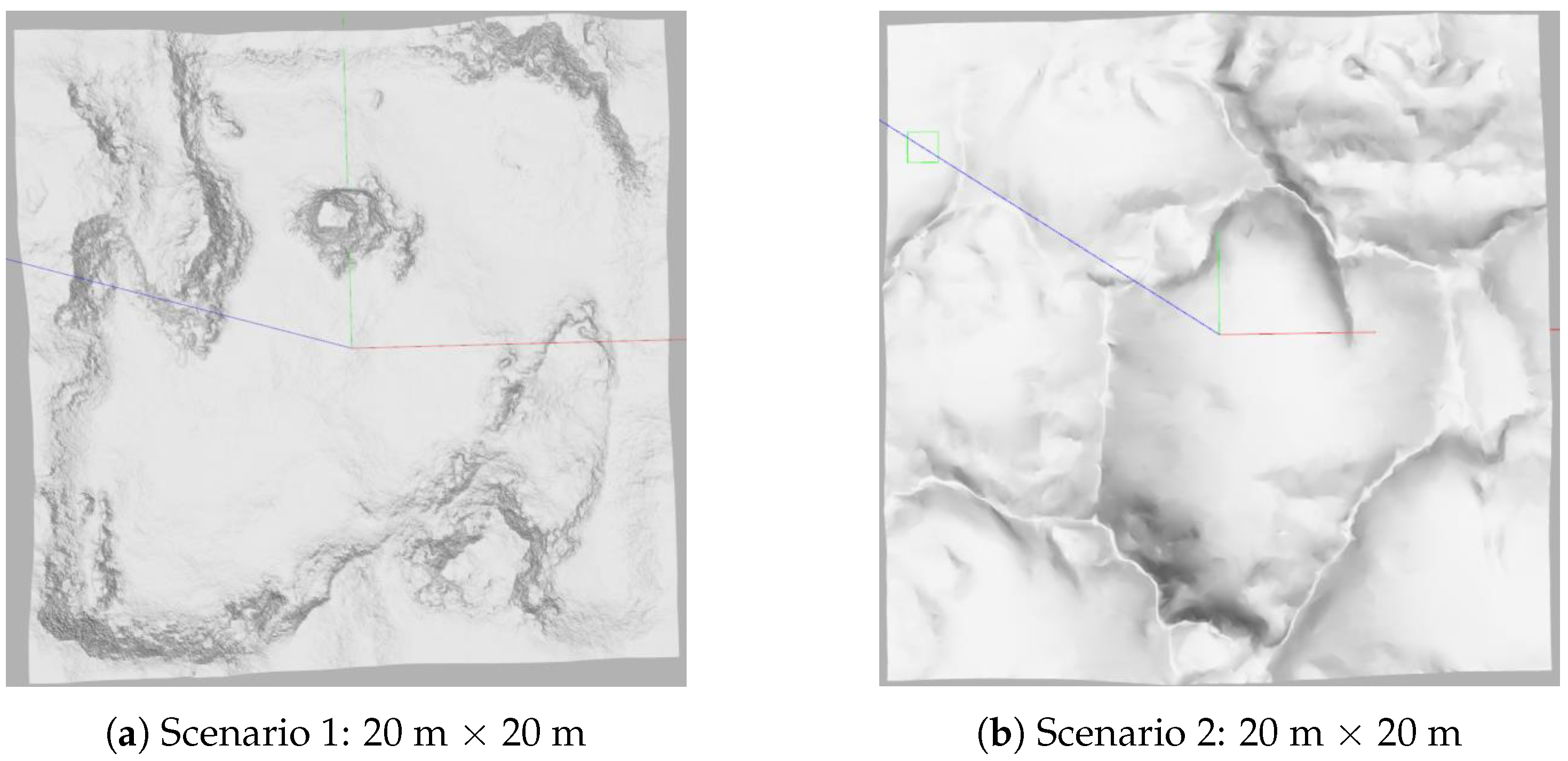
| Scenario 1 | 12.658 ms | 0.420 ms | 34.718 ms |
| Scenario 2 | 10.807 ms | 0.496 ms | 32.411 ms |
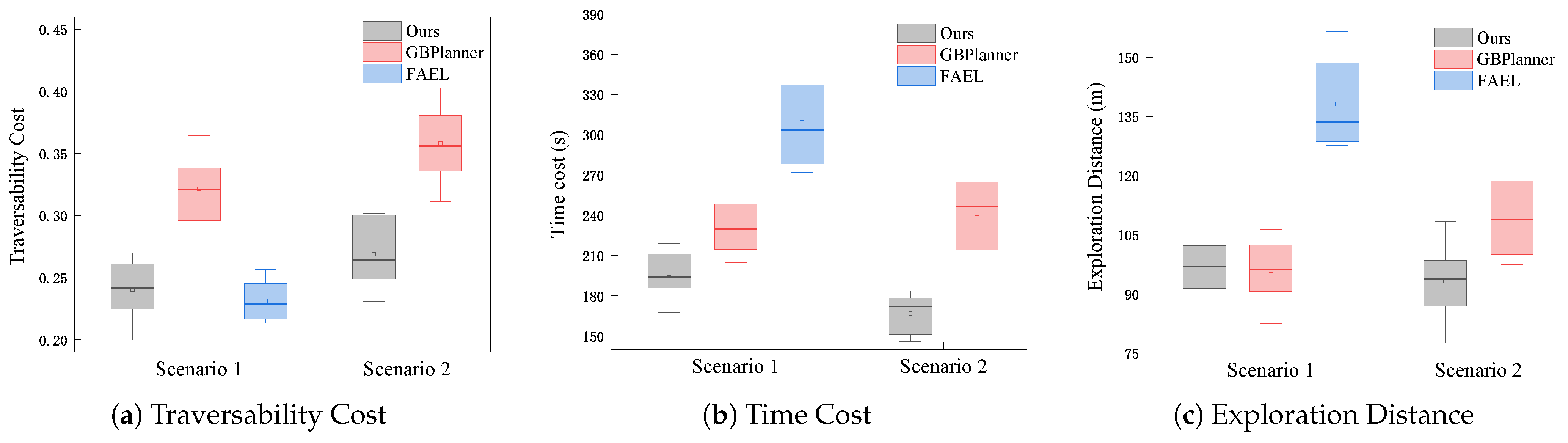
| Environment | Method | Time (s) | Distance (m) | Average Speed (m/s) | Traversability Cost |
|---|---|---|---|---|---|
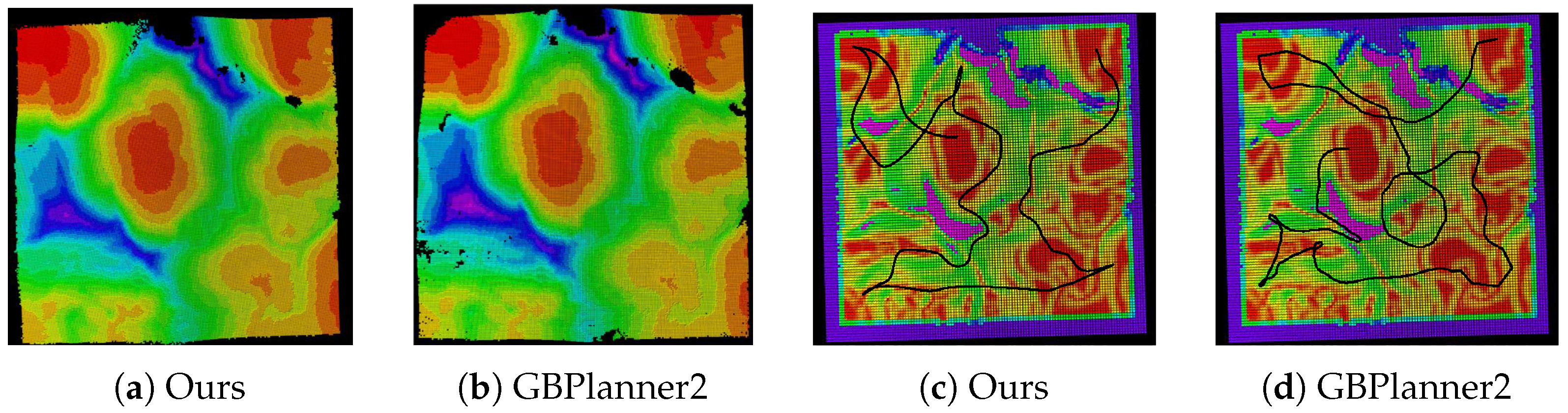
| ours | 196.306 | 97.103 | 0.495 | 0.240298 | |
| Scenario 1 | GBPlanner2 | 230.780 (14.94%) | 95.911 (−1.24%) | 0.416 | 0.321456 (25.25%) |
| FAEL | 309.219 (36.52%) | 138.153 (29.71%) | 0.457 | 0.231264 (−3.91%) | |
| ours | 166.756 | 93.203 | 0.559 | 0.268938 | |
| Scenario 2 | GBPlanner2 | 241.095 (30.83%) | 110.059 (15.32%) | 0.456 | 0.358106 (24.90%) |
| FAEL | - | - | - | - |
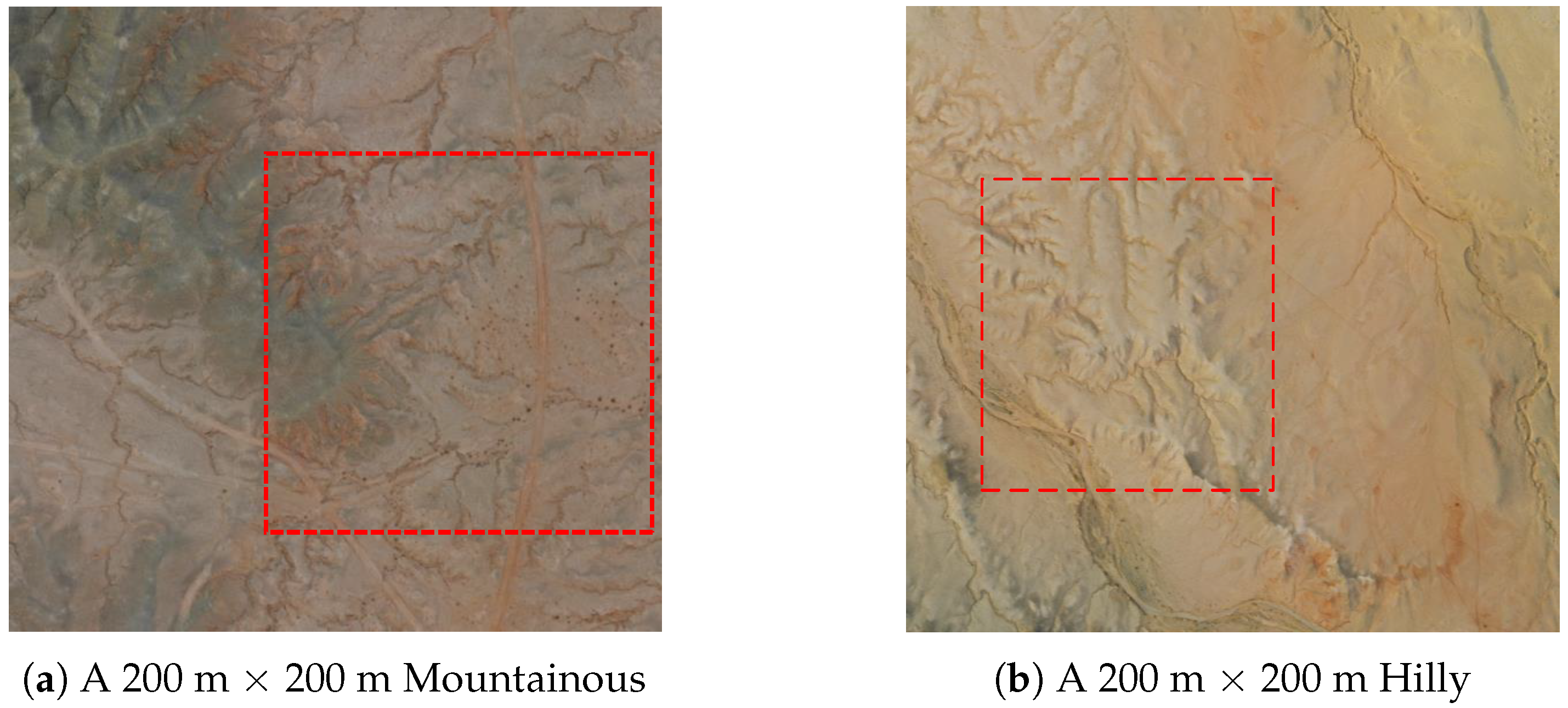
| Environment | Time | Distance | Average Speed | Traversability Cost |
|---|---|---|---|---|
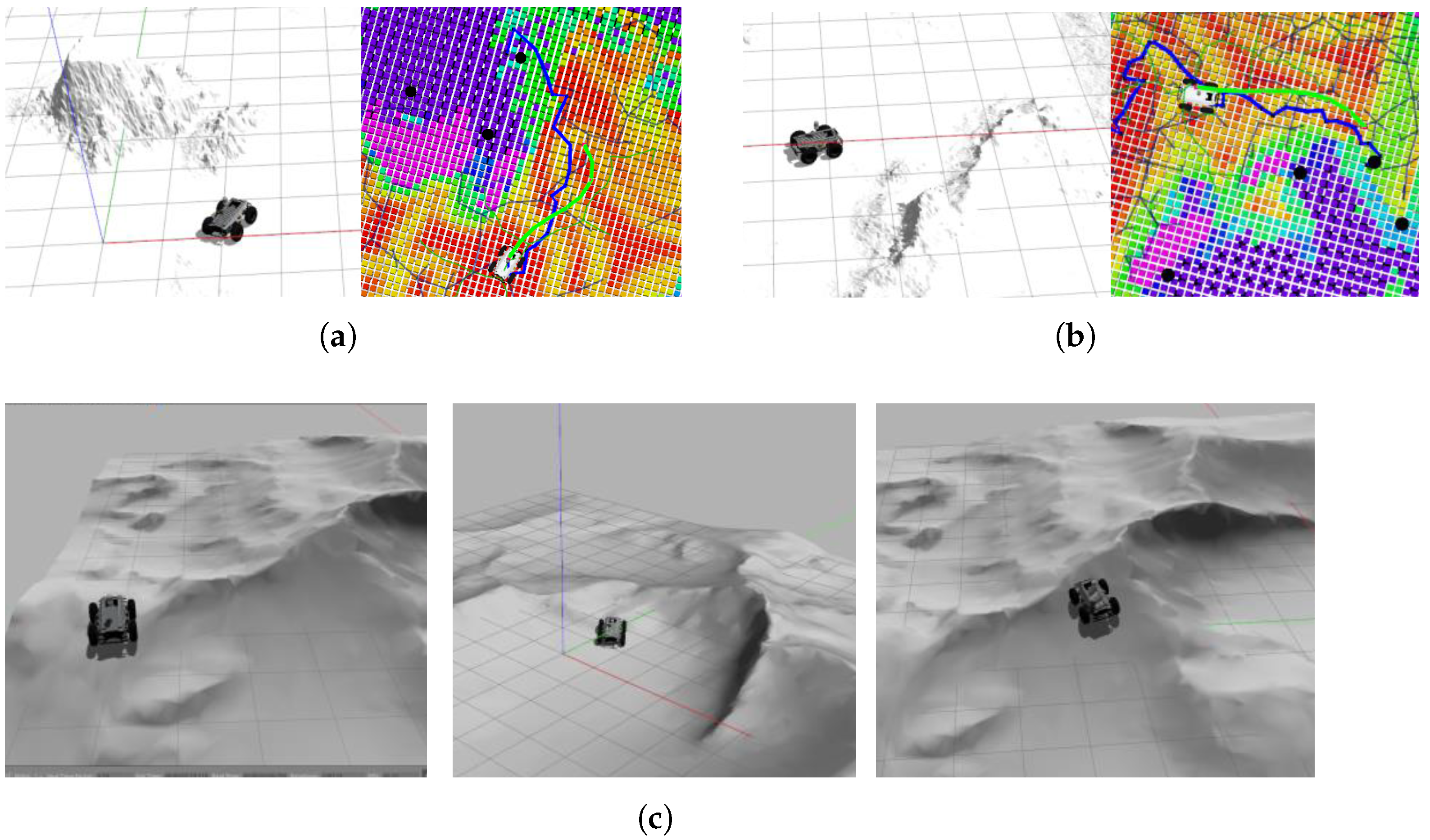
| Mountainous | 243.32 s | 570.021 m | 2.342 m/s | 0.289153 |
| Hilly | 182.69 s | 500.125 m | 2.737 m/s | 0.269926 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, L.; Qi, Y.; He, B.; Xu, Y. An Efficient Autonomous Exploration Framework for Autonomous Vehicles in Uneven Off-Road Environments. Drones 2025, 9, 490. https://doi.org/10.3390/drones9070490
Wang L, Qi Y, He B, Xu Y. An Efficient Autonomous Exploration Framework for Autonomous Vehicles in Uneven Off-Road Environments. Drones. 2025; 9(7):490. https://doi.org/10.3390/drones9070490
Chicago/Turabian StyleWang, Le, Yao Qi, Binbing He, and Youchun Xu. 2025. "An Efficient Autonomous Exploration Framework for Autonomous Vehicles in Uneven Off-Road Environments" Drones 9, no. 7: 490. https://doi.org/10.3390/drones9070490
APA StyleWang, L., Qi, Y., He, B., & Xu, Y. (2025). An Efficient Autonomous Exploration Framework for Autonomous Vehicles in Uneven Off-Road Environments. Drones, 9(7), 490. https://doi.org/10.3390/drones9070490