
Drone State Estimation Based on Frame-to-Frame Template Matching with Optimal Windows


Abstract
1. Introduction
2. Vision-Based Drone Velocity Computation
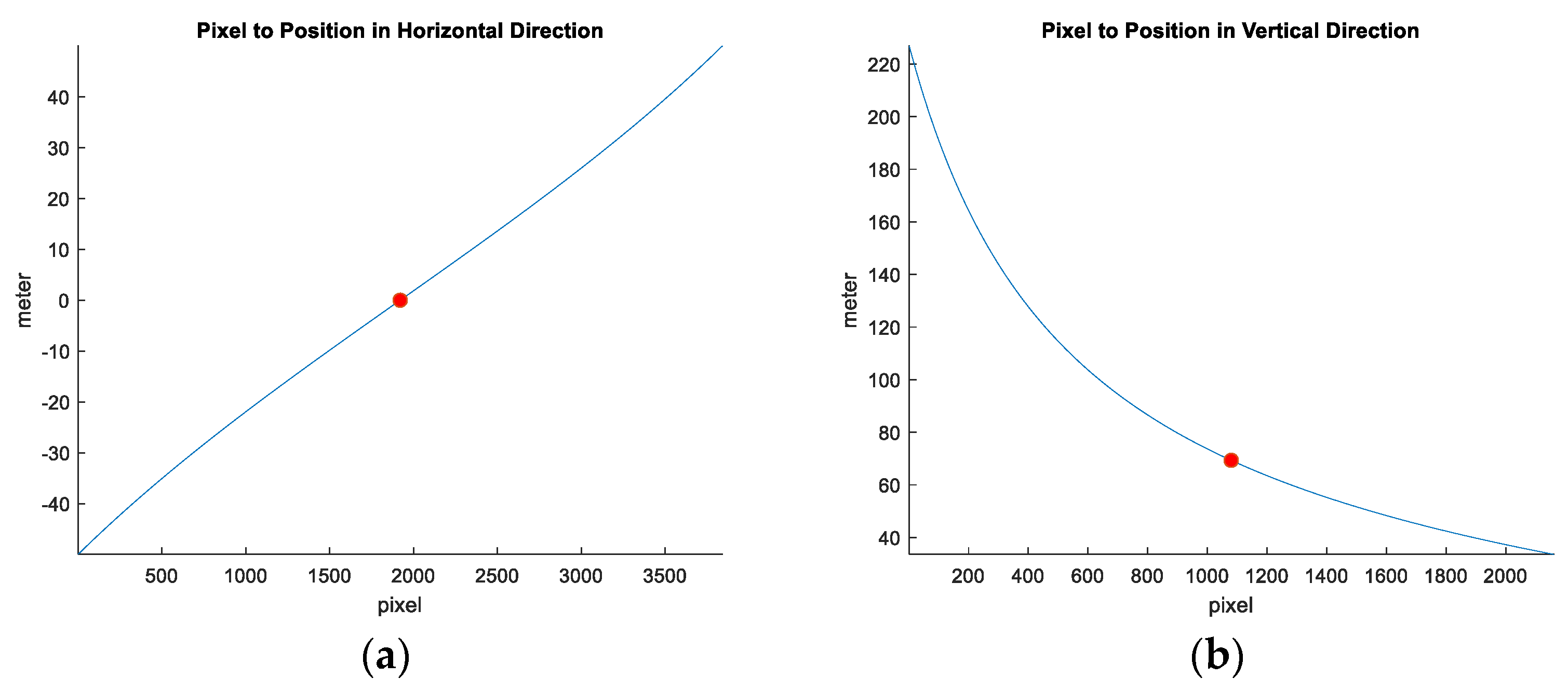
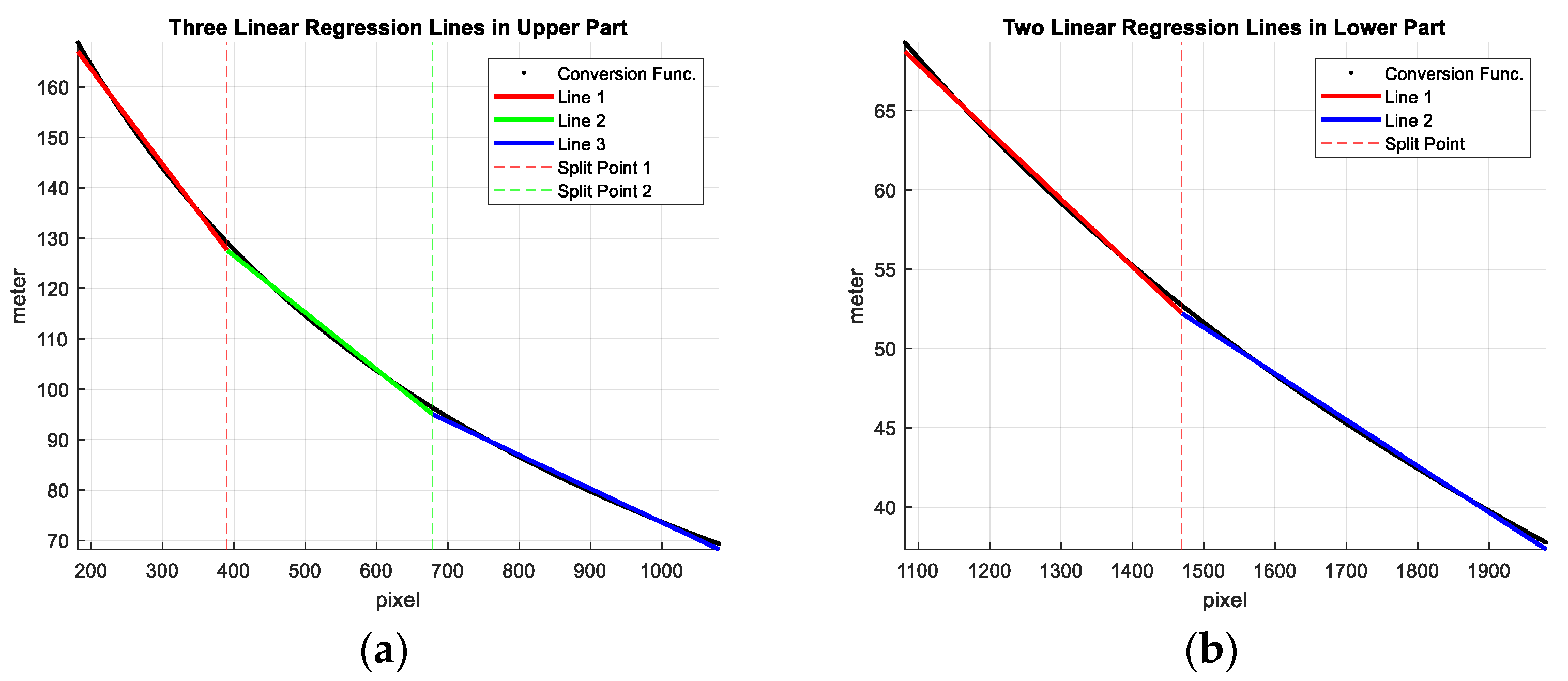
2.1. Image-to-Position Conversion
2.2. Frame-to-Frame Template Matching Based on Optimal Windows
3. Drone State Estimation
3.1. System Modeling
3.2. Kalman Filtering
4. Results
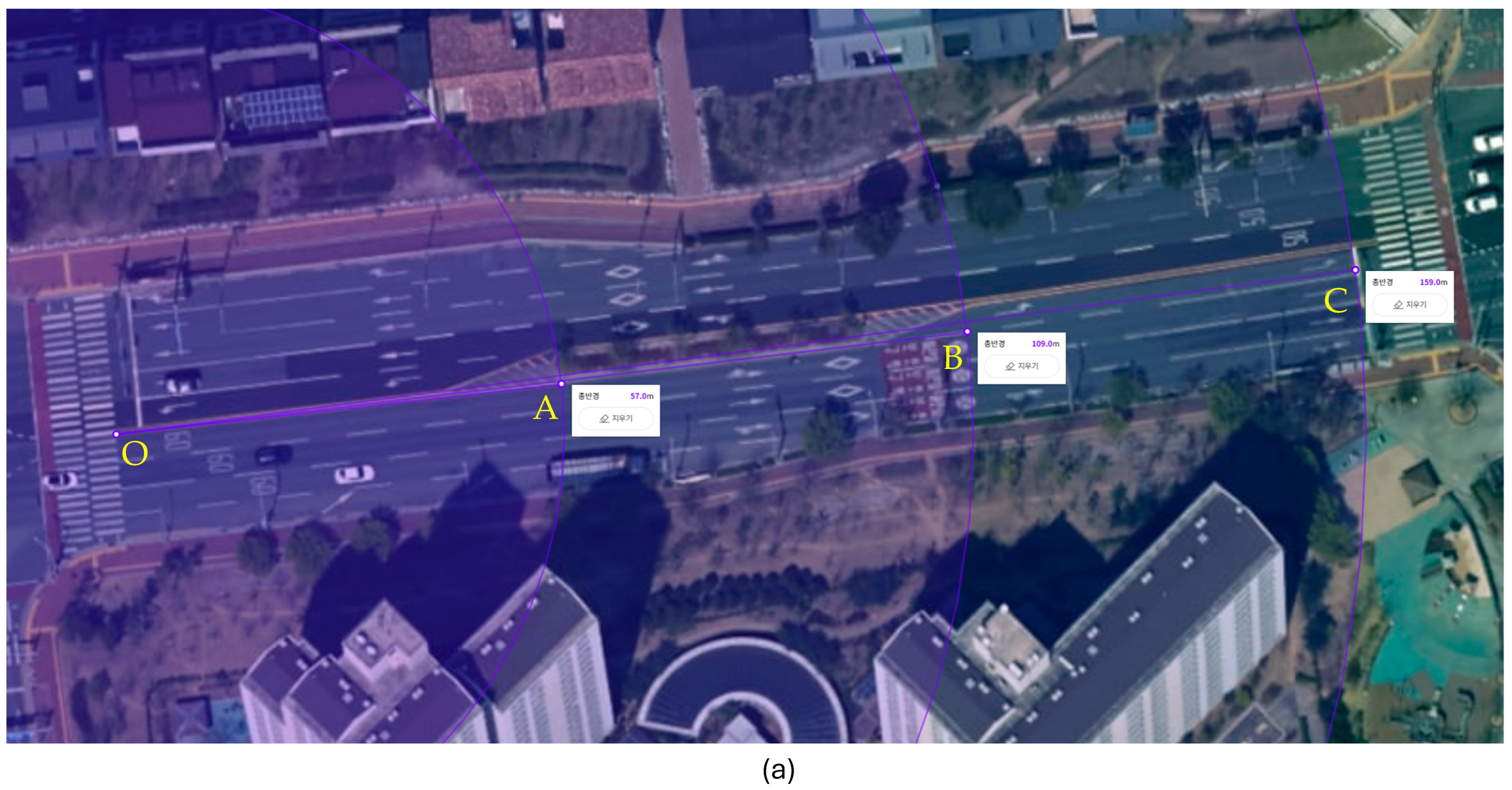
4.1. Scenario Description
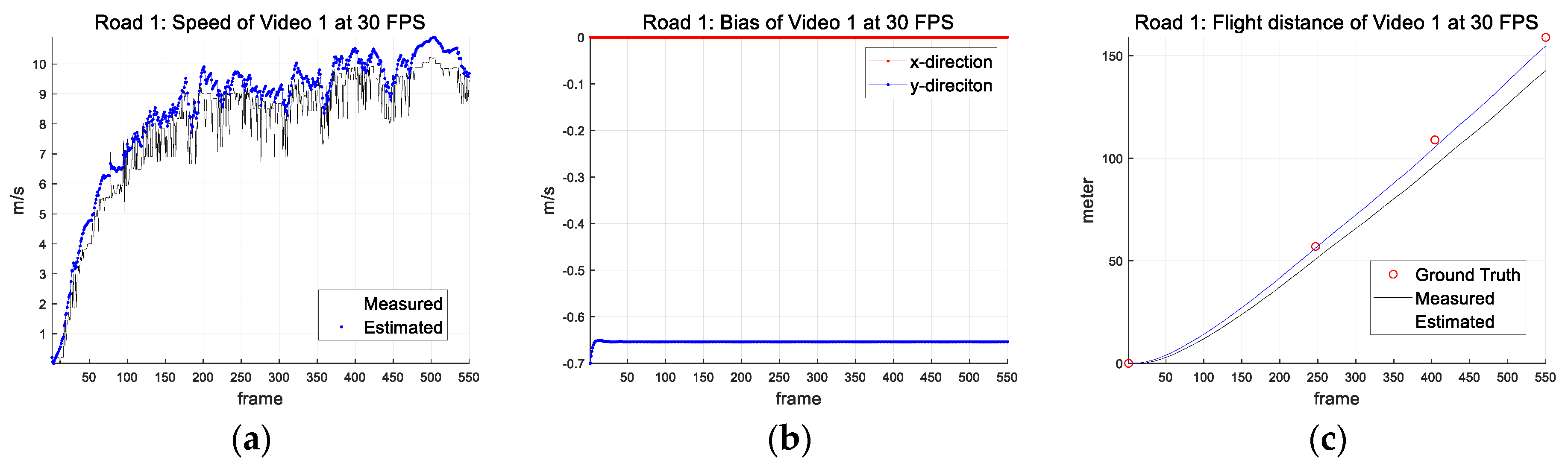
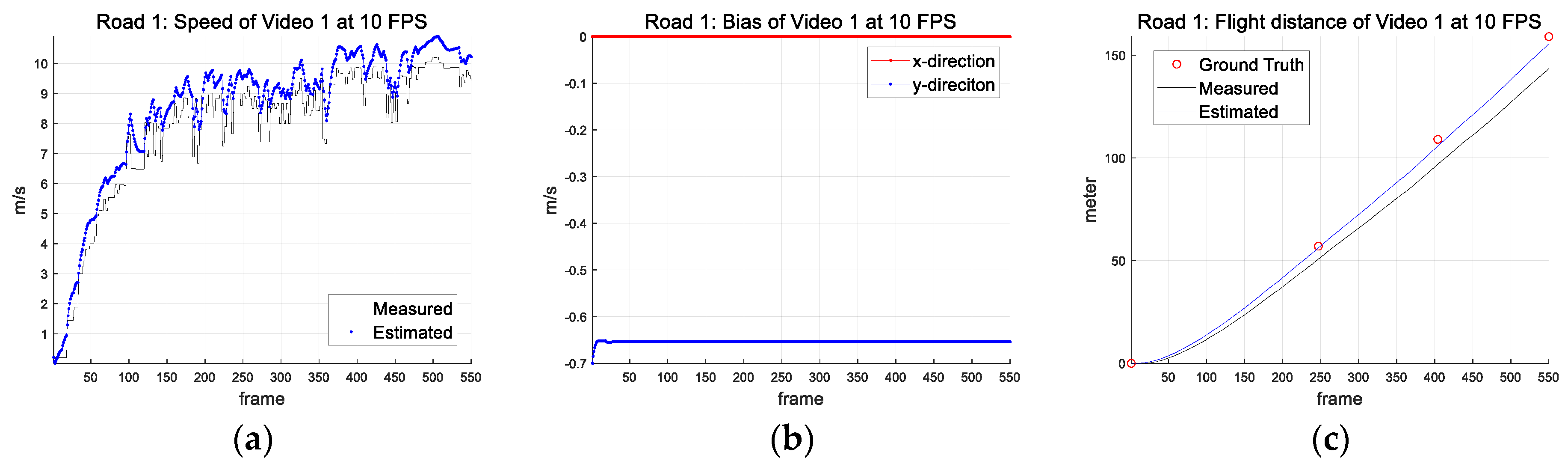
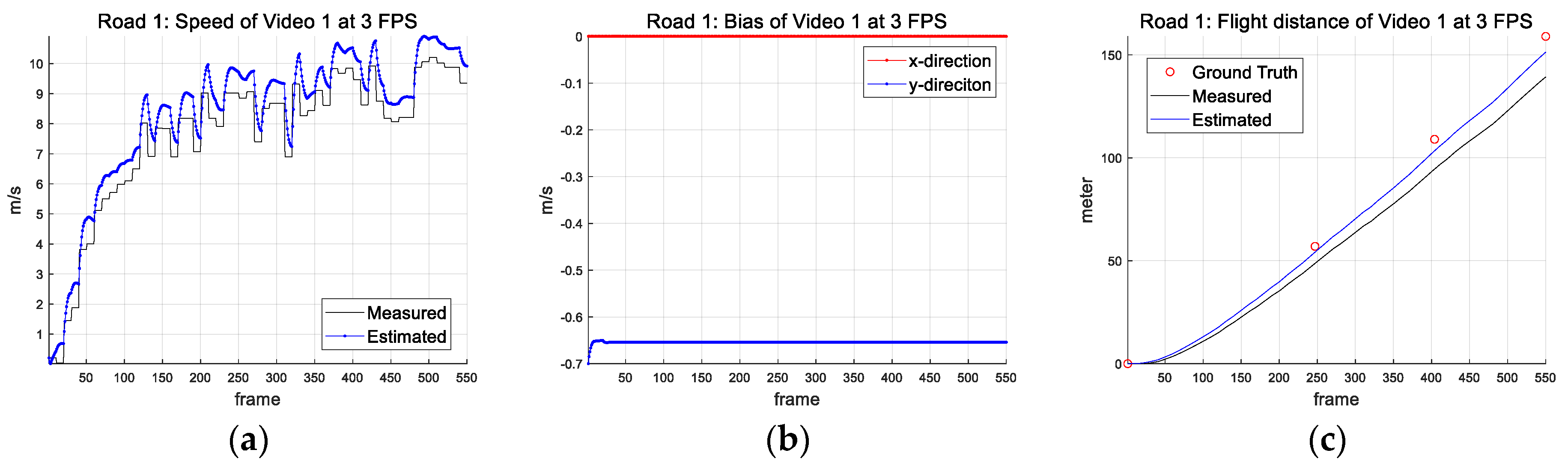
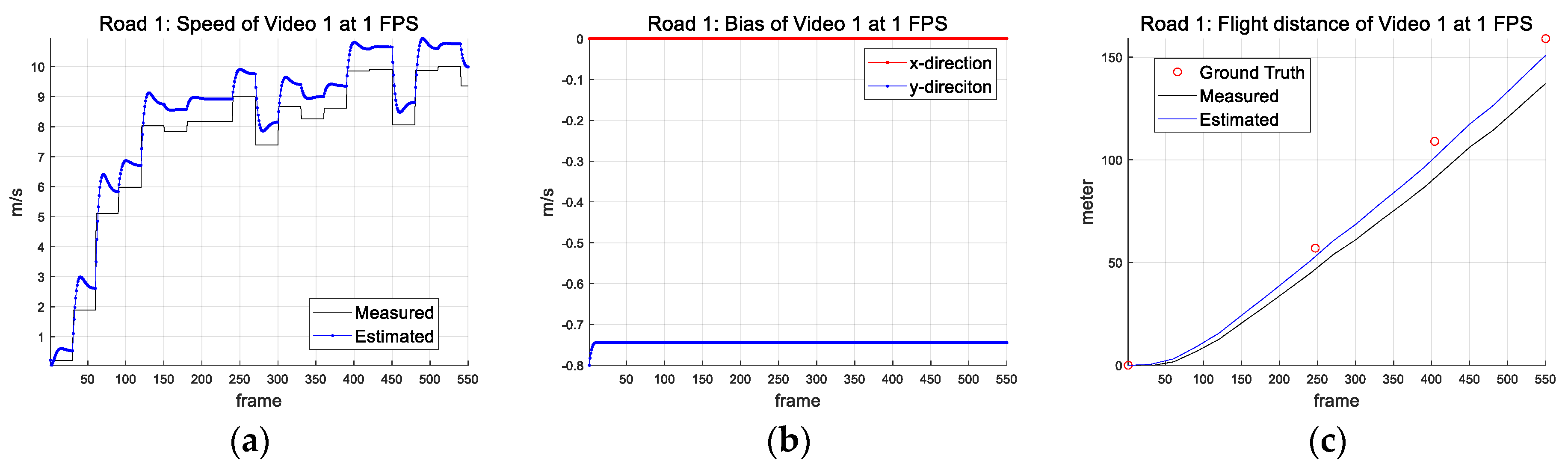
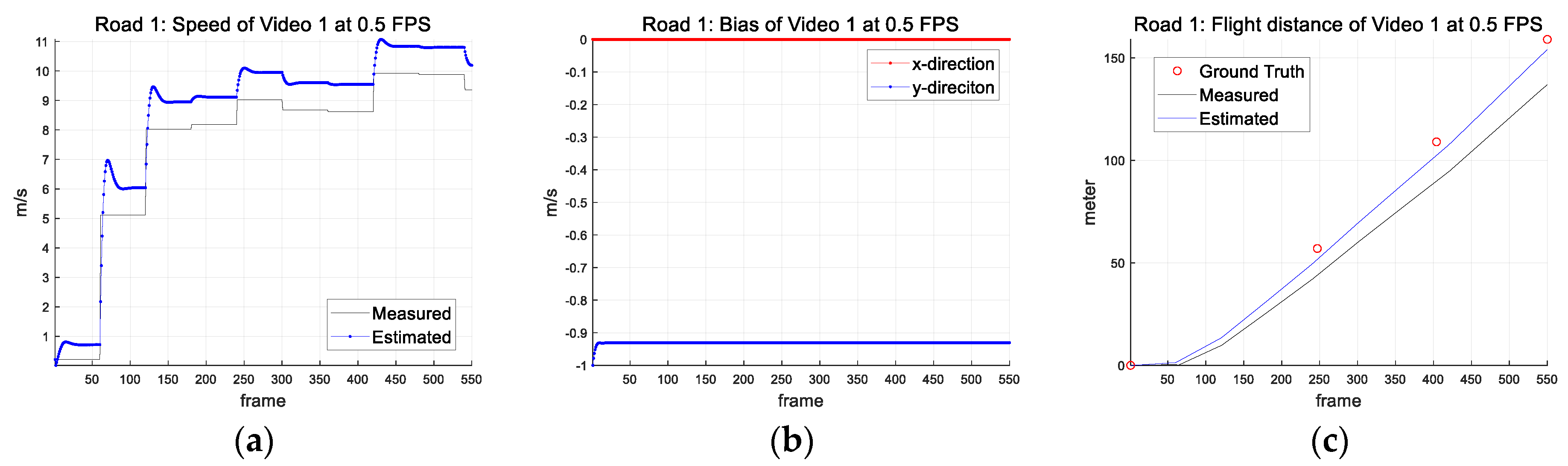
4.2. Drone State Estimation
5. Discussion
6. Conclusions
Supplementary Materials
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zaheer, Z.; Usmani, A.; Khan, E.; Qadeer, M.A. Aerial Surveillance System Using UAV. In Proceedings of the 2016 Thirteenth International Conference on Wireless and Optical Communications Networks (WOCN), Hyderabad, India, 21–23 July 2016; pp. 1–7. [Google Scholar] [CrossRef]
- Vohra, D.; Garg, P.; Ghosh, S. Usage of UAVs/Drones Based on Their Categorisation: A Review. J. Aerosp. Sci. Technol. 2023, 74, 90–101. [Google Scholar] [CrossRef]
- Osmani, K.; Schulz, D. Comprehensive Investigation of Unmanned Aerial Vehicles (UAVs): An In-Depth Analysis of Avionics Systems. Sensors 2024, 24, 3064. [Google Scholar] [CrossRef] [PubMed]
- Sekeroglu, B.; Tuncal, K. Image Processing in Unmanned Aerial Vehicles. In Unmanned Aerial Vehicles in Smart Cities; Al-Turjman, F., Ed.; Springer: Cham, Switzerland, 2020; pp. 167–179. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhu, L. A Review on Unmanned Aerial Vehicle Remote Sensing: Platforms, Sensors, Data Processing Methods, and Applications. Drones 2023, 7, 398. [Google Scholar] [CrossRef]
- Mohammed, F.; Idries, A.; Mohamed, N.; Al-Jaroodi, J.; Jawhar, I. UAVs for Smart Cities: Opportunities and Challenges. Future Gener. Comput. Syst. 2019, 93, 880–893. [Google Scholar] [CrossRef]
- Chen, C.; Tian, Y.; Lin, L.; Chen, S.; Li, H.; Wang, Y.; Su, K. Obtaining World Coordinate Information of UAV in GNSS Denied Environments. Sensors 2020, 20, 2241. [Google Scholar] [CrossRef] [PubMed]
- Cahyadi, M.N.; Asfihani, T.; Mardiyanto, R.; Erfianti, R. Performance of GPS and IMU Sensor Fusion Using Unscented Kalman Filter for Precise i-Boat Navigation in Infinite Wide Waters. Geod. Geodyn. 2023, 14, 265–274. [Google Scholar] [CrossRef]
- Qin, T.; Li, P.; Shen, S. VINS-Mono: A Robust and Versatile Monocular Visual-Inertial State Estimator. IEEE Trans. Robot. 2018, 34, 1004–1020. [Google Scholar] [CrossRef]
- Campos, C.; Elvira, R.; Rodríguez, J.J.; Montiel, J.M.M.; Tardós, J.D. ORB-SLAM3: An Accurate Open-Source Library for Visual, Visual–Inertial, and Multi-Map SLAM. IEEE Trans. Robot. 2021, 37, 1494–1512. [Google Scholar] [CrossRef]
- Kovanič, Ľ.; Topitzer, B.; Peťovský, P.; Blišťan, P.; Gergeľová, M.B.; Blišťanová, M. Review of Photogrammetric and Lidar Applications of UAV. Appl. Sci. 2023, 13, 6732. [Google Scholar] [CrossRef]
- Petrlik, M.; Spurny, V.; Vonasek, V.; Faigl, J.; Preucil, L. LiDAR-Based Stabilization, Navigation and Localization for UAVs. In Proceedings of the 2021 International Conference on Unmanned Aircraft Systems (ICUAS), Athens, Greece, 15–18 June 2021; pp. 1220–1229. [Google Scholar]
- Gaigalas, J.; Perkauskas, L.; Gricius, H.; Kanapickas, T.; Kriščiūnas, A. A Framework for Autonomous UAV Navigation Based on Monocular Depth Estimation. Drones 2025, 9, 236. [Google Scholar] [CrossRef]
- Chang, Y.; Cheng, Y.; Manzoor, U.; Murray, J. A Review of UAV Autonomous Navigation in GPS-Denied Environments. Robot. Auton. Syst. 2023, 170, 104533. [Google Scholar] [CrossRef]
- Zhang, J.; Singh, S. LOAM: Lidar Odometry and Mapping in Real-time. In Proceedings of the Robotics: Science and Systems (RSS), Berkeley, CA, USA, 9–13 July 2014. [Google Scholar]
- Shan, T.; Englot, B.; Meyers, D.; Wang, W.; Ratti, C.; Rus, D. LIO-SAM: Tightly-Coupled Lidar Inertial Odometry via Smoothing and Mapping. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24 October 2020–24 January 2021; pp. 5135–5142. [Google Scholar]
- Yang, B.; Yang, E. A Survey on Radio Frequency Based Precise Localisation Technology for UAV in GPS-Denied Environment. J. Intell. Robot. Syst. 2021, 101, 35. [Google Scholar] [CrossRef]
- Jarraya, I.; Al-Batati, A.; Kadri, M.B.; Abdelkader, M.; Ammar, A.; Boulila, W.; Koubaa, A. GNSS-Denied Unmanned Aerial Vehicle Navigation: Analyzing Computational Complexity, Sensor Fusion, and Localization Methodologies. Satell. Navig. 2025, 6, 9. [Google Scholar] [CrossRef]
- Gonzalez, R.C.; Woods, R.E. Digital Image Processing, 4th ed.; Pearson: Boston, MA, USA, 2018. [Google Scholar]
- Brunelli, R. Template Matching Techniques in Computer Vision: A Survey. Pattern Recognit. 2005, 38, 2011–2040. [Google Scholar] [CrossRef]
- Scaramuzza, D.; Fraundorfer, F. Visual Odometry [Tutorial]. IEEE Robot. Autom. Mag. 2011, 18, 80–92. [Google Scholar] [CrossRef]
- Stauffer, C.; Grimson, W.E.L. Adaptive Background Mixture Models for Real-Time Tracking. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR), Fort Collins, CO, USA, 23–25 June 1999; Volume 2, pp. 246–252. [Google Scholar]
- Forster, C.; Pizzoli, M.; Scaramuzza, D. SVO: Fast Semi-Direct Monocular Visual Odometry. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 15–22. [Google Scholar] [CrossRef]
- Kalal, Z.; Mikolajczyk, K.; Matas, J. Tracking-Learning-Detection. IEEE Trans. Pattern Anal. Mach. Intell. 2012, 34, 1409–1422. [Google Scholar] [CrossRef]
- Hecht, E. Optics, 5th ed.; Pearson: Boston, MA, USA, 2017. [Google Scholar]
- Yeom, S. Long Distance Ground Target Tracking with Aerial Image-to-Position Conversion and Improved Track Association. Drones 2022, 6, 55. [Google Scholar] [CrossRef]
- Yeom, S.; Nam, D.-H. Moving Vehicle Tracking with a Moving Drone Based on Track Association. Appl. Sci. 2021, 11, 4046. [Google Scholar] [CrossRef]
- Muggeo, V.M.R. Estimating Regression Models with Unknown Break-Points. Stat. Med. 2003, 22, 3055–3071. [Google Scholar] [CrossRef]
- Bishop, C.M. Pattern Recognition and Machine Learning; Springer: New York, NY, USA, 2006. [Google Scholar]
- OpenCV Developers. Template Matching. 2024. Available online: https://docs.opencv.org/4.x/d4/dc6/tutorial_py_template_matching.html (accessed on 5 June 2025).
- Bar-Shalom, Y.; Li, X.R. Multitarget-Multisensor Tracking: Principles and Techniques; YBS Publishing: Storrs, CT, USA, 1995. [Google Scholar]
- Simon, D. Optimal State Estimation: Kalman, H∞, and Nonlinear Approaches; Wiley-Interscience: Hoboken, NJ, USA, 2006. [Google Scholar]
- Anderson, B.D.O.; Moore, J.B. Optimal Filtering; Prentice-Hall: Englewood Cliffs, NJ, USA, 1979. [Google Scholar]
- Available online: https://dl.djicdn.com/downloads/DJI_Mini_4K/DJI_Mini_4K_User_Manual_v1.0_EN.pdf (accessed on 23 June 2020).
- Zhao, J.; Lin, X. General-Purpose Aerial Intelligent Agents Empowered by Large Language Models. arXiv 2024, arXiv:2503.08302. Available online: https://arxiv.org/abs/2503.08302 (accessed on 7 June 2025).








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter (Symbol) (Unit) | Road 1 | Road 2 |
|---|---|---|
| Sampling Time (T) (second) | 1/30 | |
| Process Noise Std. () (m/s2) | (3, 3) | |
| Bias Noise Std. () (m/s) | (0.01, 0.1) | |
| Measurement Noise Std. () (m/s) | (2, 2) | |
| Initial Bias in x direction () (m/s) | 0 | |
| Initial Covariance for Bias () (m2/s2) | (0.1, 0.1) | |
| FrameMatching Speed (FPS) | Road 1 | Road 2 | ||
|---|---|---|---|---|
| Group 1 | Group 2 | Group 3 | ||
| 30 | −0.7 | −0.3 | 0 | 0.2 |
| 10 | −0.3 | 0 | 0.2 | |
| 3 | −0.3 | 0 | 0.2 | |
| 1 | −0.8 | −0.7 | −0.3 | −0.1 |
| 0.5 | −1 | −1.2 | −0.4 | −0.4 |
| FPS | Type | Video 1 | Video 2 | Video 3 | Video 4 | Video 5 | Video 6 | Video 7 | Video 8 | Video 9 | Video 10 | Avg. |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 30 | Meas. | 16.33 | 7.69 | 7.32 | 6.77 | 9.26 | 11.53 | 13.69 | 17.06 | 14.29 | 15.99 | 11.99 |
| Est. | 4.25 | 4.55 | 4.95 | 5.54 | 3.10 | 0.89 | 1.46 | 4.50 | 2.02 | 3.95 | 3.52 | |
| 10 | Meas. | 15.66 | 8.07 | 7.74 | 7.15 | 9.53 | 12.34 | 13.70 | 17.32 | 14.82 | 16.70 | 12.30 |
| Est. | 3.59 | 4.15 | 4.51 | 5.15 | 2.82 | 0.08 | 1.47 | 4.79 | 2.57 | 4.63 | 3.38 | |
| 3 | Meas. | 19.73 | 9.49 | 10.43 | 8.28 | 11.45 | 12.92 | 13.90 | 18.04 | 13.75 | 16.47 | 13.45 |
| Est. | 7.65 | 2.71 | 1.81 | 4.00 | 0.91 | 0.51 | 1.69 | 5.50 | 1.53 | 4.34 | 3.07 | |
| 1 | Meas. | 21.89 | 14.33 | 15.92 | 13.58 | 15.57 | 18.19 | 17.83 | 19.18 | 16.08 | 19.46 | 17.20 |
| Est. | 8.16 | 0.40 | 1.96 | 0.39 | 1.47 | 4.03 | 3.92 | 4.85 | 2.12 | 5.68 | 3.30 | |
| 0.5 | Meas. | 22.14 | 17.19 | 23.45 | 20.27 | 18.83 | 20.07 | 23.79 | 20.13 | 21.26 | 22.46 | 20.96 |
| Est. | 5.03 | 0.16 | 6.06 | 2.87 | 1.25 | 2.41 | 6.45 | 2.23 | 3.89 | 5.31 | 3.57 |
| FPS | Type | Group 1 | Group 2 | Group 3 | Avg. | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Video 1 | Video 2 | Video 3 | Video 4 | Video 5 | Video 6 | Video 7 | Video 8 | Video 9 | Video 10 | |||
| 30 | Meas. | 11.96 | 4.60 | 5.47 | 0.35 | 0.46 | 3.94 | 4.84 | 5.10 | 4.21 | 11.96 | 5.29 |
| Est. | 7.04 | 1.39 | 0.69 | 0.22 | 0.31 | 0.71 | 1.66 | 1.78 | 1.22 | 8.83 | 2.39 | |
| 10 | Meas. | 12.00 | 5.37 | 5.55 | 0.87 | 0.74 | 3.56 | 4.39 | 4.65 | 4.22 | 11.16 | 5.25 |
| Est. | 7.02 | 1.99 | 0.63 | 0.70 | 0.57 | 0.33 | 1.22 | 1.33 | 1.20 | 8.03 | 2.30 | |
| 3 | Meas. | 14.32 | 6.09 | 5.89 | 2.23 | 1.91 | 2.30 | 2.48 | 3.09 | 2.63 | 8.56 | 4.95 |
| Est. | 9.31 | 1.58 | 0.92 | 2.06 | 1.76 | 0.93 | 0.71 | 0.22 | 0.46 | 5.40 | 2.33 | |
| 1 | Meas. | 17.78 | 8.45 | 11.18 | 5.73 | 4.31 | 1.15 | 1.26 | 1.46 | 1.41 | 5.18 | 5.79 |
| Est. | 6.33 | 2.59 | 0.22 | 0.49 | 0.89 | 0.72 | 0.60 | 0.46 | 0.44 | 7.01 | 1.97 | |
| 0.5 | Meas. | 23.11 | 12.74 | 18.76 | 8.08 | 6.88 | 5.43 | 8.49 | 6.21 | 6.84 | 0.59 | 9.71 |
| Est. | 3.62 | 6.05 | 0.62 | 1.14 | 0.00 | 1.53 | 1.61 | 0.93 | 0.04 | 6.22 | 2.18 | |
| FPS | Type | Point A (57 m) | Point B (109 m) | Point C (159 m) |
|---|---|---|---|---|
| 30 | Meas. | 5.17 | 9.58 | 11.99 |
| Est. | 1.68 | 2.35 | 3.52 | |
| 10 | Meas. | 5.47 | 9.93 | 12.30 |
| Est. | 1.68 | 2.34 | 3.38 | |
| 3 | Meas. | 6.52 | 11.24 | 13.45 |
| Est. | 1.51 | 2.39 | 3.07 | |
| 1 | Meas. | 10.16 | 15.12 | 17.20 |
| Est. | 3.74 | 4.81 | 3.30 | |
| 0.5 | Meas. | 13.64 | 19.23 | 20.96 |
| Est. | 5.66 | 6.40 | 3.57 |
| FPS | Type | Point A (48 m) | Point B (100 m) | Point C (150 m) |
|---|---|---|---|---|
| 30 | Meas. | 3.25 | 4.27 | 5.29 |
| Est. | 3.18 | 3.30 | 2.39 | |
| 10 | Meas. | 2.88 | 4.07 | 5.25 |
| Est. | 2.83 | 3.00 | 2.30 | |
| 3 | Meas. | 1.99 | 3.29 | 4.95 |
| Est. | 1.84 | 1.69 | 2.33 | |
| 1 | Meas. | 2.41 | 4.23 | 5.79 |
| Est. | 1.34 | 2.19 | 1.97 | |
| 0.5 | Meas. | 6.41 | 6.87 | 9.71 |
| Est. | 1.92 | 2.00 | 2.18 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yeom, S. Drone State Estimation Based on Frame-to-Frame Template Matching with Optimal Windows. Drones 2025, 9, 457. https://doi.org/10.3390/drones9070457
Yeom S. Drone State Estimation Based on Frame-to-Frame Template Matching with Optimal Windows. Drones. 2025; 9(7):457. https://doi.org/10.3390/drones9070457
Chicago/Turabian StyleYeom, Seokwon. 2025. "Drone State Estimation Based on Frame-to-Frame Template Matching with Optimal Windows" Drones 9, no. 7: 457. https://doi.org/10.3390/drones9070457
APA StyleYeom, S. (2025). Drone State Estimation Based on Frame-to-Frame Template Matching with Optimal Windows. Drones, 9(7), 457. https://doi.org/10.3390/drones9070457