


Small Drone Detection Using Hybrid Beamforming 24 GHz Fully Integrated CMOS Radar




Abstract
1. Introduction
2. Materials and Methods
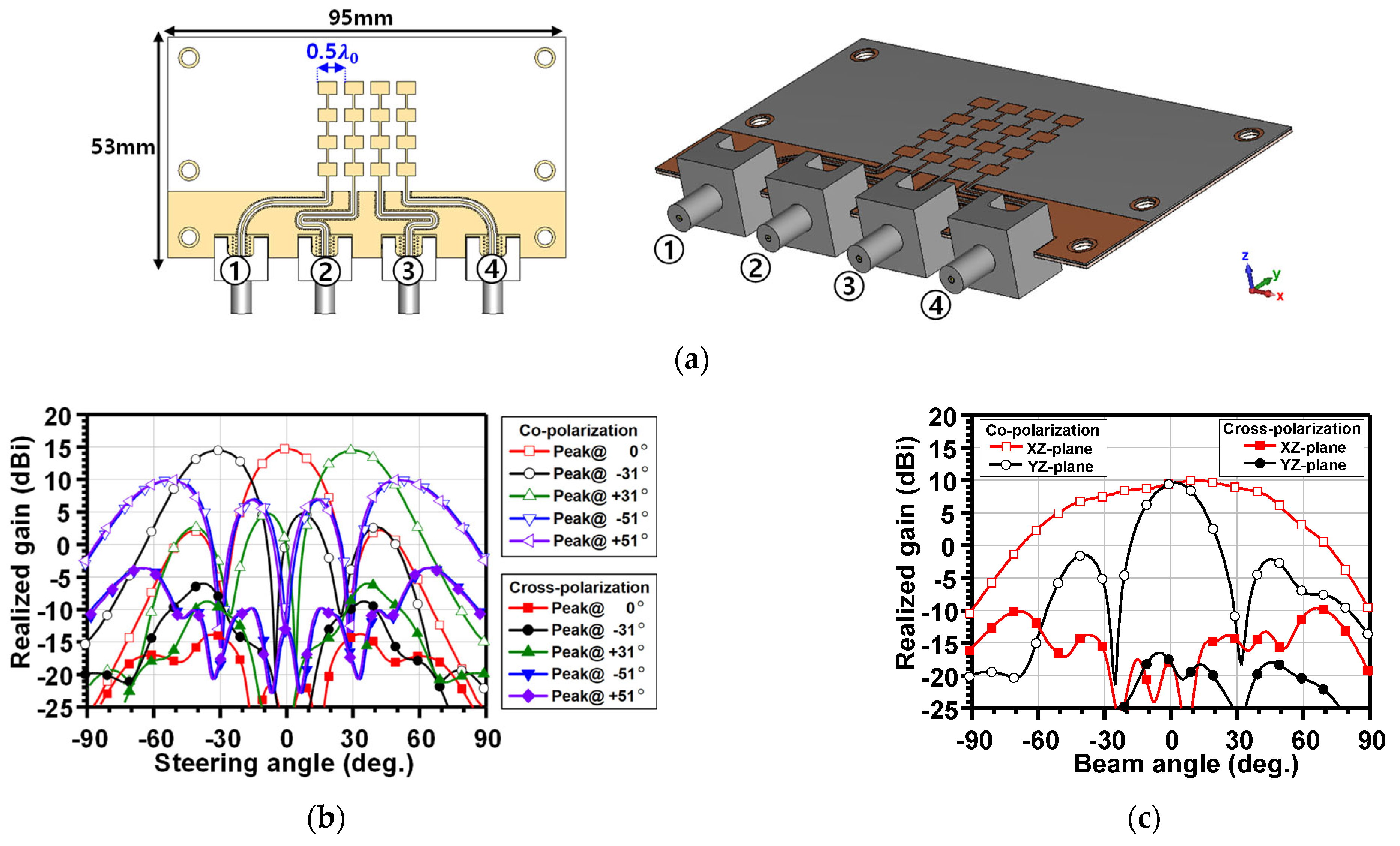
2.1. Series-Fed Uniform Patch Array Antenna Configuration
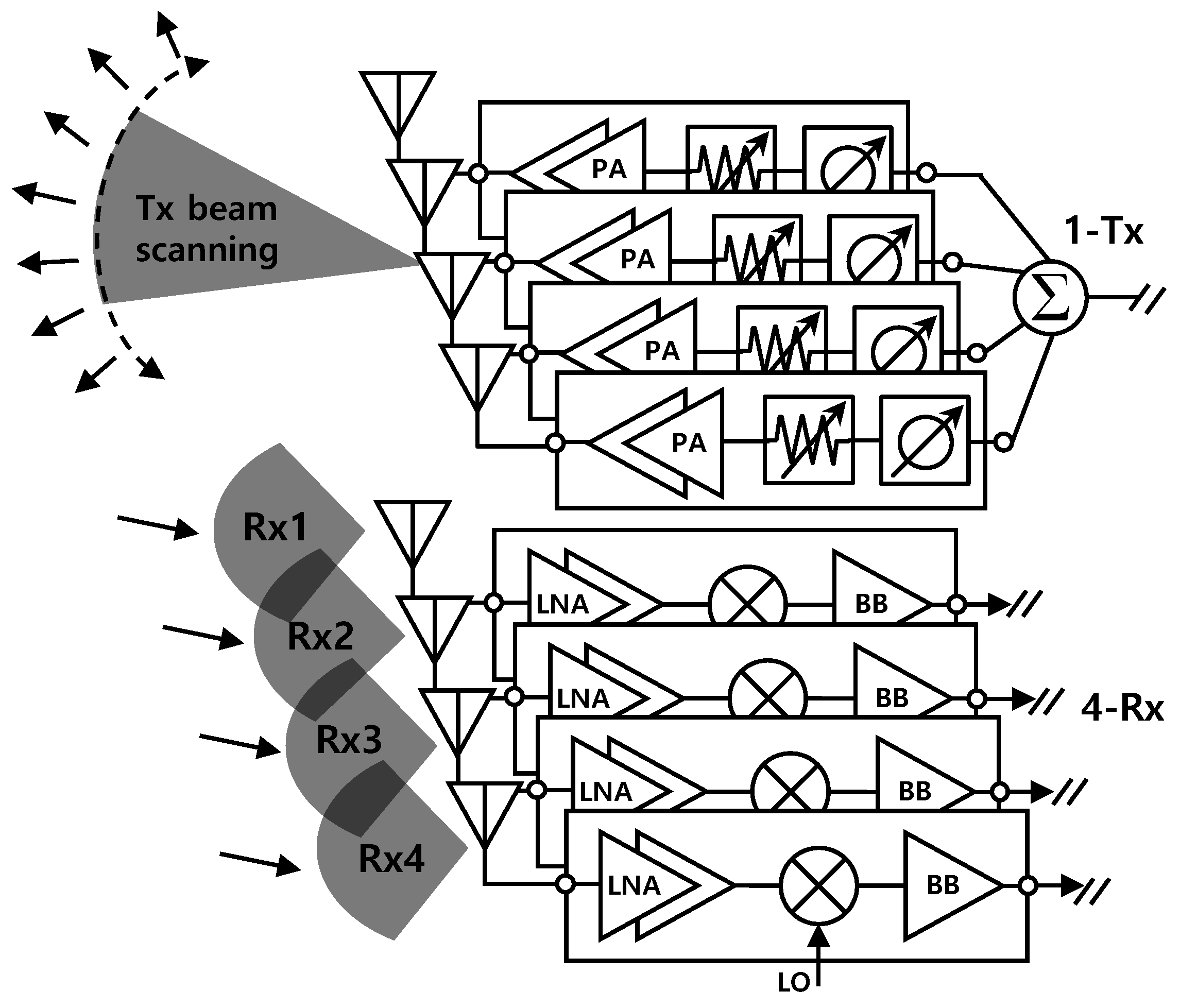
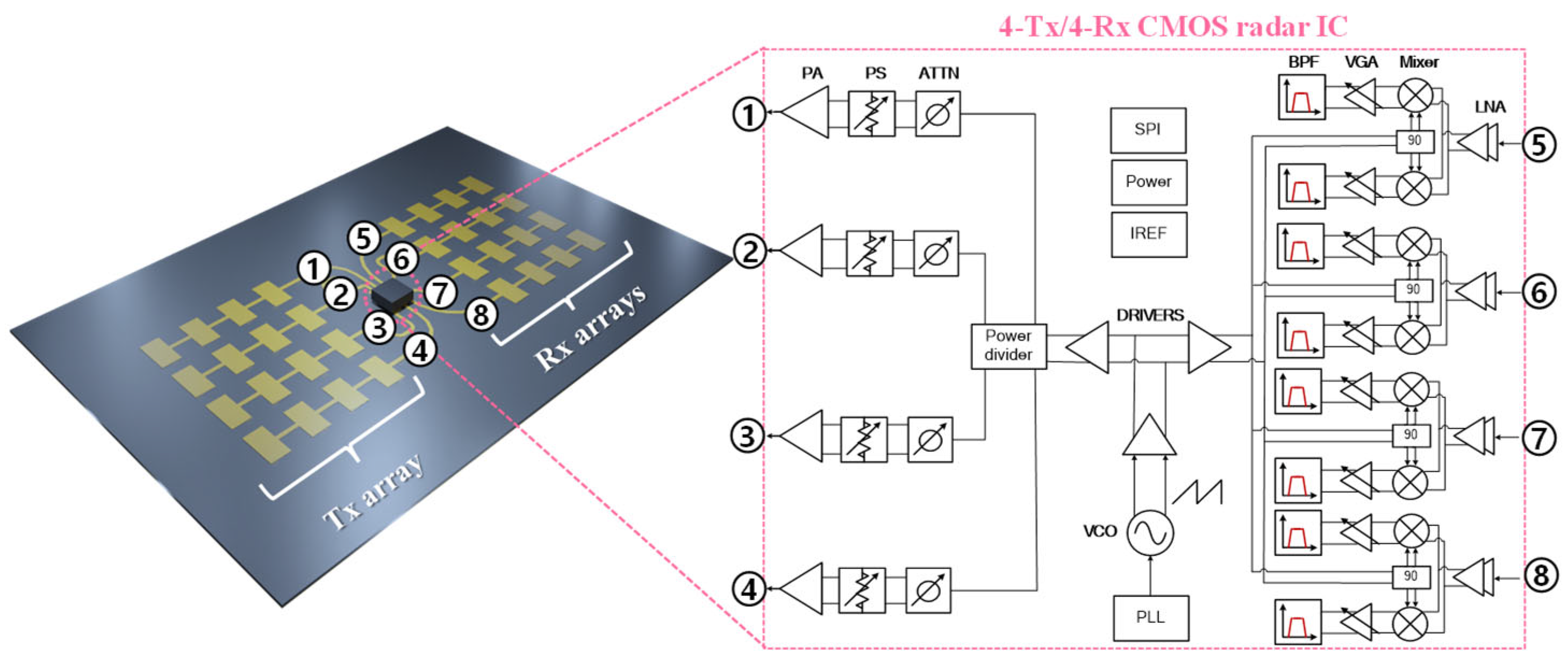
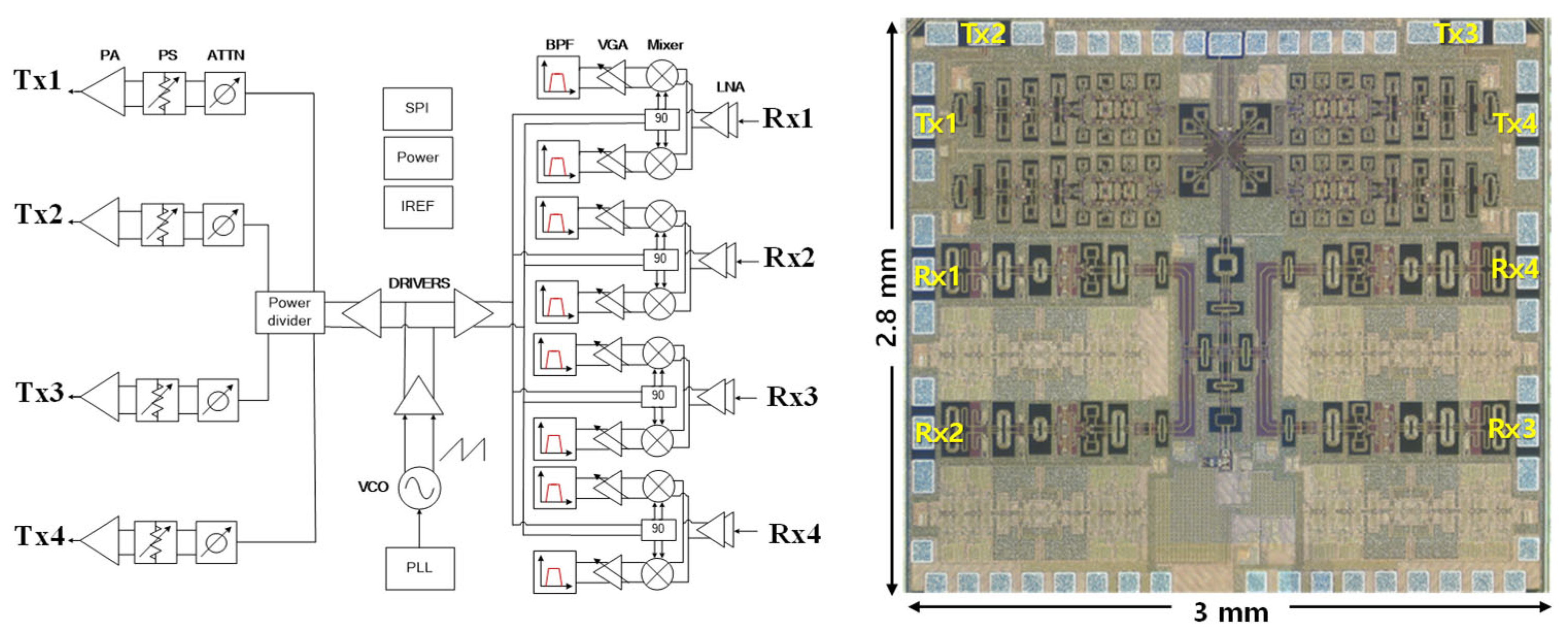
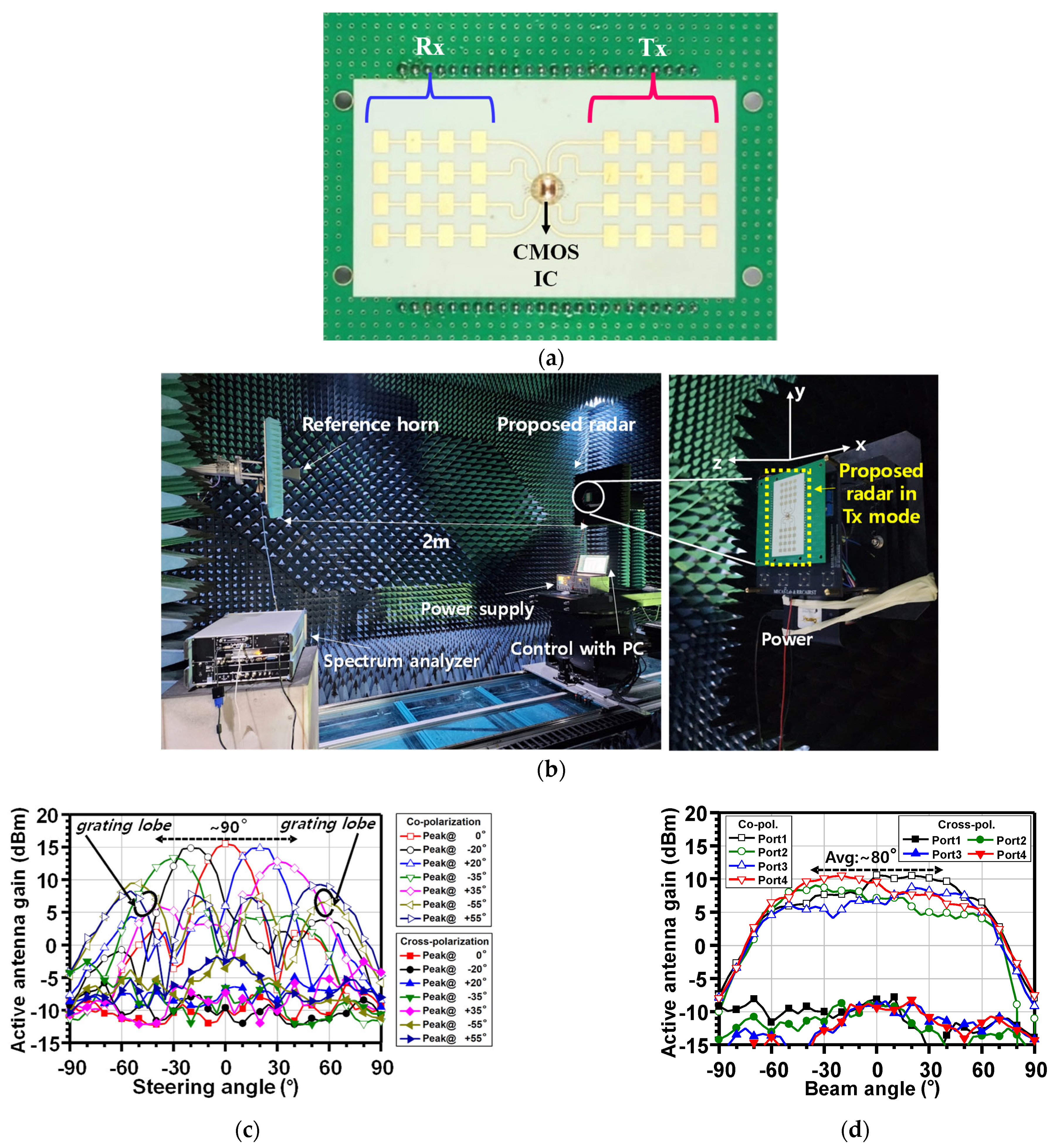
2.2. The 24 GHz 4Tx–4Rx CMOS Radar IC Configuration
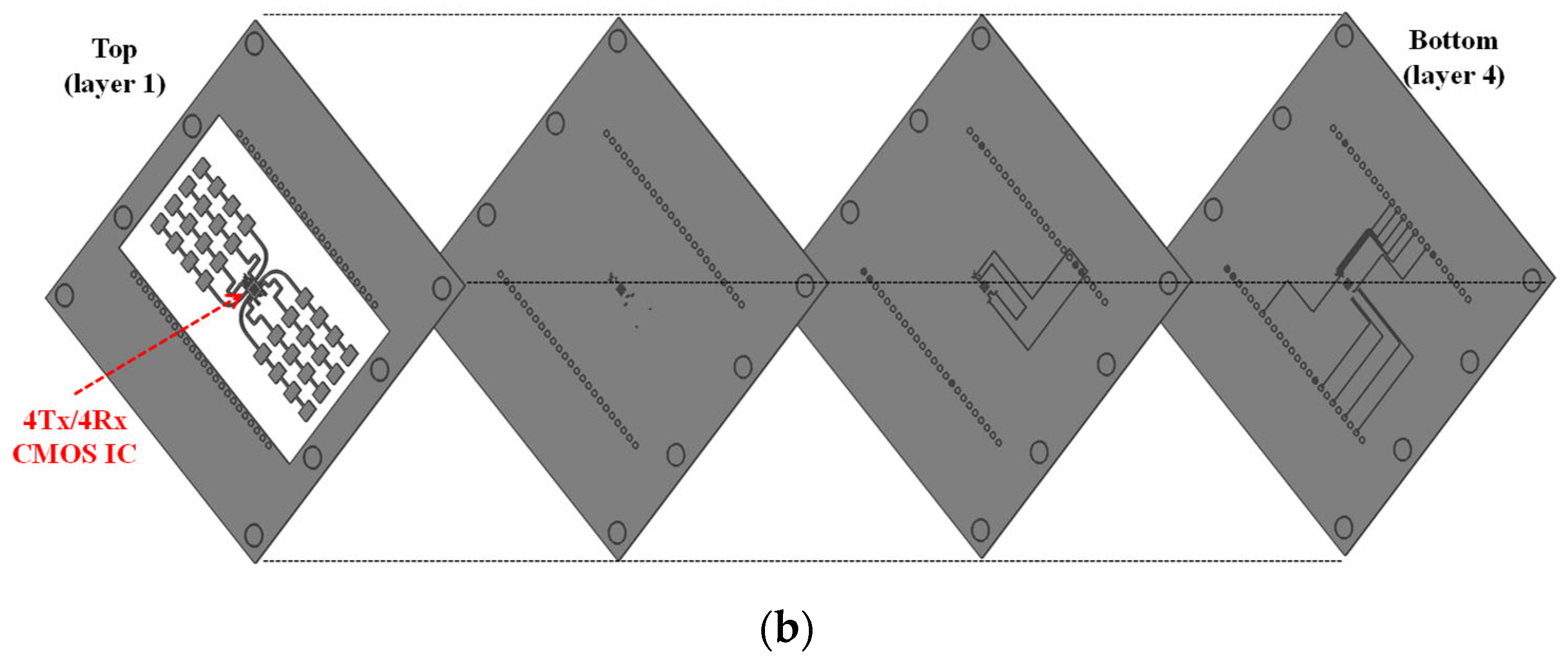
2.3. Fully Integrated Multilayer PCB Configuration
3. Results
3.1. 24 GHz Radar IC Fabrication
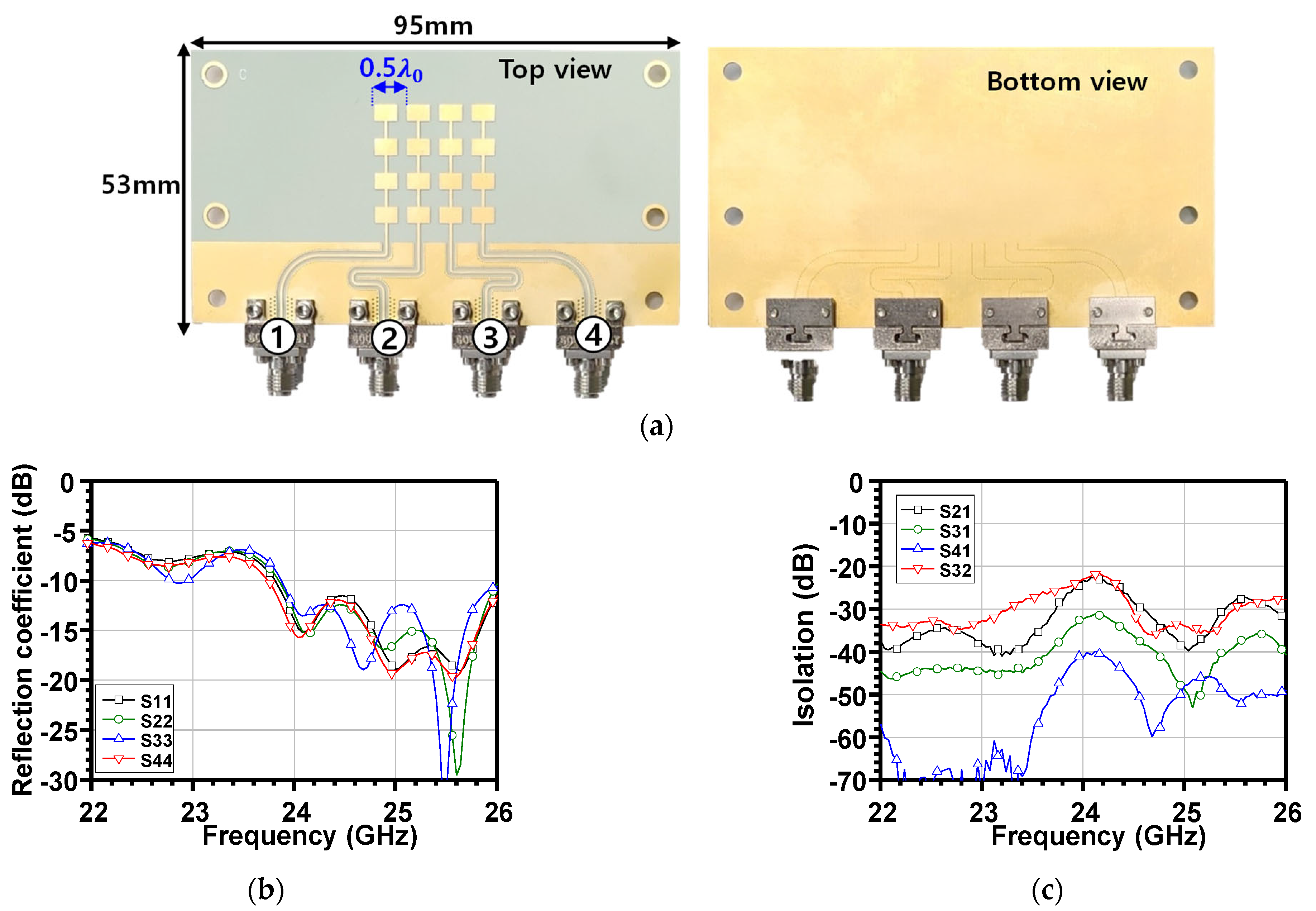
3.2. Series-Fed Array Antenna Simulation and Measurement
3.3. Radar Beam-Pattern Measurement
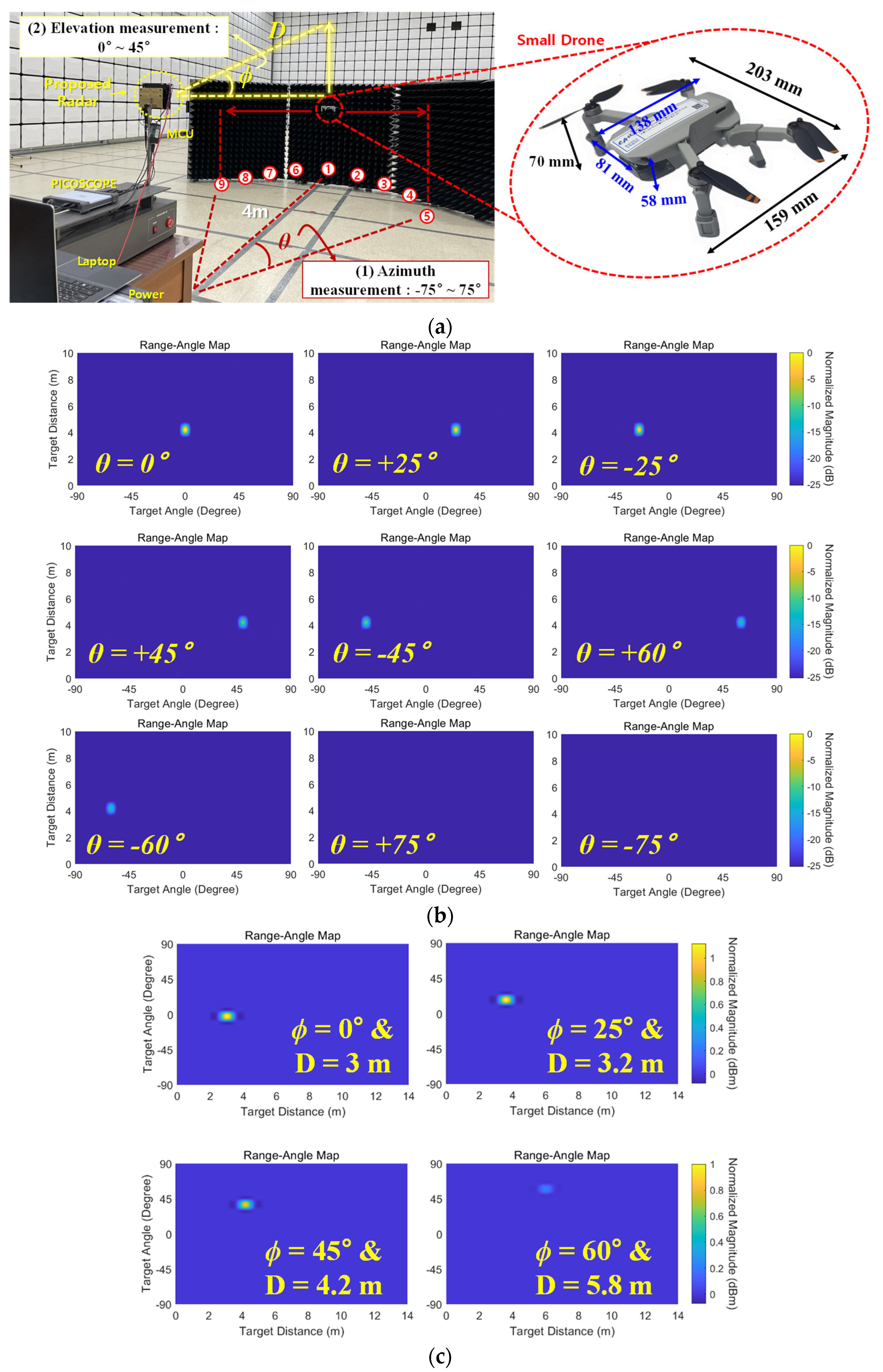
3.4. Small Drone Detection Test
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Eiadkaew, S.; Boonpoonga, A.; Phaebua, K.; Athikulwongse, K.; Shutimarrungson, N. Design and Experiment of FMCW Radar System for Drone Detection. In Proceedings of the 37th International Technical Conference on Circuits/Systems, Computers and Communications (ITC-CSCC), Phuket, Thailand, 5–8 July 2022. [Google Scholar]
- Mughal, A.M.; Shahid, A.; Shaukat, M.Z.; Ashraf, M.A.; Ullah, T. Drone Detection and Classification on Micro-Doppler Signatures Using FMCW Radar. In Proceedings of the 20th International Bhurban Conference on Applied Sciences and Technology (IBCAST), Bhurban, Murree, Pakistan, 22–25 August 2023. [Google Scholar]
- Liu, Z.; An, P.; Yang, Y.; Qiu, S.; Liu, Q.; Xu, X. Vision-Based Drone Detection in Complex Environments: A Survey. Drones 2024, 8, 643. [Google Scholar] [CrossRef]
- Ezuma, M.; Anjinappa, C.K.; Semkin, V.; Guvenc, I. Comparative Analysis of Radar-Cross-Section-Based UAV Recognition Techniques. IEEE Sens. J. 2022, 22, 17932–17949. [Google Scholar] [CrossRef]
- Chu, X.; Zhou, X.; Bu, Q.; Miao, Q. Sensor Fault Detection for UAVs Using Improved Self-Attention LSTM Network with Similarity Space Mapping. IEEE Trans. Instrum. Meas. 2025, 73, 1–12. [Google Scholar] [CrossRef]
- Ye, N.; Walker, J.P.; Gao, Y.; PopStefanija, I.; Hills, J. Comparison Between Thermal-Optical and L-Band Passive Microwave Soil Moisture Remote Sensing at Farm Scales: Towards UAV-Based Near-Surface Soil Moisture Mapping. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2024, 17, 633–642. [Google Scholar] [CrossRef]
- Rahman, S.; Robertson, D.A. FAROS-E: A Compact and Low-Cost Millimeter Wave Surveillance Radar for Real-Time Drone Detection and Classification. In Proceedings of the 21st International Radar Symposium (IRS), Berlin, Germany, 21–22 June 2021; pp. 1–6. [Google Scholar]
- Ivancic, J.; Alves, F. Directional Multi-Resonant Micro-Electromechanical System Acoustic Sensor for Low Frequency Detection. Sensors 2024, 24, 2908. [Google Scholar] [CrossRef]
- Semenyuk, V.; Kurmashev, I.; Lupidi, A.; Alyoshin, D.; Kurmasheva, L.; Cantelli-Forti, A. Advances in UAV Detection: Integrating Multi-Sensor Systems and AI for Enhanced Accuracy and Efficiency. Int. J. Crit. Infrastruct. Prot. 2025, 49, 100744. [Google Scholar] [CrossRef]
- Prasad, S.V.R.V.; Khilar, P.M. SVM-SFL Based Malicious UAV Detection in Wireless Sensor Networks. Concurr. Comput. Pract. Exp. 2024, 36, e8049. [Google Scholar] [CrossRef]
- Qiu, L.; Zhou, D.; Wang, Y.; Chu, Q.; Zhu, Z.; Li, T.; Dong, Y. Dynamic Distributed Pressure Measurement Using Frequency-Agile Fast BOTDA. IEEE Sens. J. 2021, 21, 25743–25748. [Google Scholar] [CrossRef]
- Abdelnasser, H.; McCann, J.A. Drone Propeller Speed Measurement: Case Study Using 5GHz RF and mmWave Radar. In Proceedings of the IEEE 99th Vehicular Technology Conference (VTC2024-Spring), Singapore, 24–27 June 2024; pp. 1–6. [Google Scholar]
- Bhatia, J.; Dayal, A.; Jha, A.; Vishvakarma, S.K.; Joshi, S.; Srinivas, M.B.; Yalavarthy, P.K.; Kumar, A.; Lalitha, V.; Koorapati, S.; et al. Classification of Targets Using Statistical Features from Range FFT of mmWave FMCW Radars. Electronics 2021, 10, 1965. [Google Scholar] [CrossRef]
- de Cos Gómez, M.E.; Flórez Berdasco, A.; Las-Heras Andrés, F. Eco-Friendly Metadome-Antenna Innovations for Wearable Millimeter Wave Radar Sensing. Appl. Sci. 2025, 15, 2674. [Google Scholar] [CrossRef]
- Huebner, K.C.; Tegowski, B.; Koelpin, A. A Six-Port-Based Tracking System for Automated Landing of Fixed-Wing UAVs. In Proceedings of the 25th International Microwave and Radar Conference (MIKON), Wroclaw, Poland, 1–4 July 2024. [Google Scholar]
- Chaky, R.J.; Beneck, R.J.; Campbell, S.D.; Werner, D.H. Simultaneous Optimization of 1-bit 3-D Coding Meta-Volumes for Both Broadband and Wide Field-of-View Radar Cross-Section Reduction. IEEE Trans. Antennas Propag. 2023, 71, 3361–3370. [Google Scholar] [CrossRef]
- Li, Y.; Zhang, Y.; Han, Z.; Tang, S.; Jing, L.; Chiu, C.Y.; Murch, R. Analog Precoding Using Highly Reconfigurable Antennas. IEEE Wirel. Commun. Lett. 2020, 9, 648–652. [Google Scholar] [CrossRef]
- Zhang, C.; Shen, S.; Han, Z.; Murch, R. Analog Beamforming Using ESPAR for Single-RF Precoding Systems. IEEE Trans. Wirel. Commun. 2023, 22, 4387–4400. [Google Scholar] [CrossRef]
- Ragonese, E.; Papotto, G.; Nocera, C.; Cavarra, A.; Palmisano, G. CMOS Automotive Radar Sensors: mm-Wave Circuit Design Challenges. IEEE Trans. Circuits Syst. II Express Briefs 2022, 69, 2610–2616. [Google Scholar] [CrossRef]
- Tschoban, C.B.; Pötter, H.; Dilek, S.; Ndip, I.; Schneider-Ramelow, M. Integratable Antenna Concepts Based on Conformal Antennas for 3D Radar Systems. In Proceedings of the International Workshop on Antenna Technology (iWAT), Aalborg, Denmark, 15–17 May 2023. [Google Scholar]
- Lee, S.; Yoon, D.; Hwang, K.; Wang, H.; Park, K.-H.; Bae Park, Y. Wideband Fan-Beam Lens Antenna for IR-UWB Through-the-Wall Human Detection Radar. IEEE Sens. J. 2025, 25, 11246–11257. [Google Scholar] [CrossRef]
- Lee, C.U.; Noh, G.; Ahn, B.K.; Yu, J.-W.; Lee, H.L. Tilted-Beam Switched Array Antenna for UAV Mounted Radar Applications with 360° Coverage. Electronics 2019, 8, 1240. [Google Scholar] [CrossRef]
- Lee, H.; Kim, Y.-B.; Lee, H.L. Reconfigurable Antenna for UAV-Assisted Wide Coverage Air-to-Ground Communications. IEEE Access 2022, 10, 88034–88042. [Google Scholar] [CrossRef]
- Lee, H.L.; Park, D.-H.; Lee, M.-Q.; Yu, J.-W. Reconfigurable 2 × 2 Multi-Port Amplifier Using Switching Mode Hybrid Matrices. IEEE Microw. Wirel. Compon. Lett. 2014, 24, 129–131. [Google Scholar] [CrossRef]
- Dong, H.-J.; Kim, Y.-B.; Lee, H.L. Reconfigurable Quad-Polarization Switched Beamforming Antenna with Crossed Inverted-V Array and Dual-Butler Matrix. IEEE Trans. Antennas Propag. 2022, 70, 2708–2716. [Google Scholar] [CrossRef]
- Kim, Y.-J.; Kim, Y.-B.; Dong, H.-J.; Cho, Y.S.; Lee, H.L. Compact Switched-Beam Array Antenna with a Butler Matrix and a Folded Ground Structure. Electronics 2020, 9, 2. [Google Scholar] [CrossRef]
- Li, X.; Zhang, Y.; Wang, H. Practical Investigation of a MIMO Radar System Capabilities for Small Drones Detection. Remote Sens. 2022, 14, 1016. [Google Scholar]
- Wei, Z.; Zhang, F.; Chang, S.; Liu, Y.; Wu, H.; Feng, Z. Comprehensive Review: Effectiveness of MIMO and Beamforming for UAV Detection. Remote Sens. 2024, 16, 1016. [Google Scholar]
- Balanis, C.A. Antenna Theory: Analysis and Design; Wiley: Hoboken, NJ, USA, 1982. [Google Scholar]
- Pozar, D.M. Microwave Engineering, 4th ed.; Wiley: Hoboken, NJ, USA, 2012. [Google Scholar]
- Lee, J.; Lee, H.; Ko, G.-H.; Baek, D.; Lee, H.L. Compact and Highly Efficient Short-Range Radar for Advanced Driver Assistant Systems. IEEE Trans. Veh. Technol. 2023, 72, 1629–1637. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value | Parameters | Value |
|---|---|---|---|
| Phase Noise | −85.1 dBc/Hz | Rx max. gain | 105 dB |
| RMS freq. error | 350 kHz | Rx NF | 16 dB |
| Total Tx max. power | −4 dBm | Chip area | 8.4 mm2 |
| PA PAE @ −10 dBm | 34% | Power consumption4 | 393 mW |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jin, K.; Han, S.-S.; Baek, D.; Lee, H.L. Small Drone Detection Using Hybrid Beamforming 24 GHz Fully Integrated CMOS Radar. Drones 2025, 9, 453. https://doi.org/10.3390/drones9070453
Jin K, Han S-S, Baek D, Lee HL. Small Drone Detection Using Hybrid Beamforming 24 GHz Fully Integrated CMOS Radar. Drones. 2025; 9(7):453. https://doi.org/10.3390/drones9070453
Chicago/Turabian StyleJin, Kangjie, Seung-Soo Han, Donghyun Baek, and Han Lim Lee. 2025. "Small Drone Detection Using Hybrid Beamforming 24 GHz Fully Integrated CMOS Radar" Drones 9, no. 7: 453. https://doi.org/10.3390/drones9070453
APA StyleJin, K., Han, S.-S., Baek, D., & Lee, H. L. (2025). Small Drone Detection Using Hybrid Beamforming 24 GHz Fully Integrated CMOS Radar. Drones, 9(7), 453. https://doi.org/10.3390/drones9070453