1. Introduction
With the rapid proliferation of unmanned aerial vehicles (UAVs) in diverse real-world applications, including urban surveillance, disaster response, infrastructure inspection, and military reconnaissance, the demand for intelligent, robust, and cooperative control strategies has become increasingly imperative [
1,
2,
3]. These applications often involve complex, time-sensitive, and dynamic environments where individual UAVs are insufficient to accomplish mission objectives alone. Cooperative control of multi-UAV systems has gained considerable attention due to its ability to address complex tasks that individual agents cannot accomplish. Multi-UAV systems offer numerous advantages, such as flexibility, adaptability, robustness, cost-effectiveness, and enhanced system efficiency. It is important to note that the cooperative control of multi-UAV systems encompasses various interconnected topics, including consensus [
4], tracking [
5], formation [
6,
7], enclosing [
8], flocking [
9], and containment [
10].
Formation control constitutes a fundamental problem in the cooperative control of multi-UAV systems, as it requires the design of distributed control strategies that enable multiple agents to form and maintain a specified geometric configuration. Unlike consensus, which aims at reaching agreement on scalar or vector states, formation control focuses on maintaining prescribed relative positions among agents over time. Murray [
11] summarized some typical applications of formation control, such as military systems, aerial surveillance, transportation systems, and air traffic control. Existing formation control approaches can be broadly categorized into the following three main classes: behavior-based methods [
12,
13], leader-following strategies [
14,
15], and virtual structure techniques [
16,
17,
18], each with distinct modeling assumptions and coordination mechanisms.
In recent years, consensus-based formation control strategies, which rely on localized information exchange among agents to achieve coordinated group behaviors, have garnered significant research attention. By appropriately selecting the information states over which consensus is reached, such as positions, velocities, or control inputs, consensus algorithms can be effectively tailored to address various formation control problems (see, e.g., [
19,
20,
21,
22,
23,
24,
25]). For instance, in [
19], a consensus-based approach was proposed for second-order multi-agent systems (MASs), wherein both position and velocity consensus were achieved to facilitate formation tracking. It was shown that many classical strategies, including leader–follower and virtual structure-based schemes, can be unified under a generalized consensus framework. Further advancements have extended consensus-based formation control to various MAS models, including first-order, second-order, and general linear dynamics [
20,
21,
22]. In parallel, practical applications, such as multi-robot coordination, UAV formation flight, and autonomous underwater vehicle (AUV) deployment, have driven the development of distributed consensus protocols capable of handling real-world constraints and dynamic environments [
23,
24,
25]. Despite these developments, many existing consensus-based methods assume ideal communication, perfect model knowledge, or disturbance-free environments, which limits their robustness in practical deployments. In scenarios involving uncertain dynamics, external disturbances, or limited actuation capabilities, maintaining formation accuracy and system stability becomes considerably more challenging. Therefore, it is both theoretically significant and practically necessary to develop enhanced formation control strategies that ensure robust performance in the presence of such uncertainties.
From a practical standpoint, studying robust formation control is crucial for understanding how agents coordinate their movements and achieve collective goals in complex and dynamically changing environments. It is well known that the settling time characterizes the convergence rate of a closed-loop system, which is an important indicator of the performance and stability of MASs and has already attracted extensive attention from researchers [
26]. The convergence within a finite-time interval can be categorized into several types, including finite-time, fixed-time, and prescribed-time. Most of the aforementioned work has focused on achieving asymptotic convergence. However, achieving faster convergence is typically desirable for better system performance and robustness in practice. In this context, many works have been done on designing finite-time formation control methods to provide faster convergence and improved robustness [
27,
28,
29]. However, in these works, the finite-time control approaches depend on the initial states of agents, which implies that when initial states approach infinity, the system tends to diverge, significantly reducing its potential for prescribed-time convergence. Recently, fixed-time formation control algorithms have been developed to guarantee convergence within a uniform upper bound that is independent of the system’s initial conditions [
30,
31,
32]. Despite this advancement, existing fixed-time control protocols typically lack an explicit functional relationship between the control parameters and the convergence rate. Consequently, the estimated settling time is often overly conservative, leading to a misrepresentation of the system’s actual performance. This limitation poses significant challenges in applications where strict temporal constraints are imposed, as it hinders the ability to precisely regulate convergence within a user-specified time frame.
To mitigate the overestimation of settling time and reduce its dependence on design parameters, the concept of prescribed-time control was initially introduced by Song et al. [
33]. In contrast to finite-time and fixed-time control, prescribed-time control offers a more precise, efficient, and flexible framework for multi-agent coordination. Specifically, it guarantees that the system reaches its control objectives within a designer-specified convergence time, which is incorporated directly into the control protocol and remains independent of the agents’ initial conditions. This property makes prescribed-time control particularly attractive for time-critical applications where strict temporal guarantees are essential. Owing to these advantages, recent research efforts have increasingly focused on developing various prescribed-time control strategies tailored to different classes of nonlinear, uncertain, or networked systems. Ning et al. have thoroughly reviewed some results on prescribed-time consensus in [
34]. Currently, there are mainly two implementations of prescribed-time control methods based on time-varying functions. First, some prescribed-time consensus controllers only allow the system to operate prior to the prescribed time, such as [
35,
36]. However, these prescribed-time control methods, which are implemented through the setting of a predefined time function, can encounter singularity issues at the prescribed-time points. Alternatively, the controllers are set to a constant after the prescribed-time instant, like [
37,
38,
39,
40]. In both scenarios, the agreement state of the agents can be easily broken even by minor external disturbances. Ways to explore more intuitive and flexible methods to ensure system responses converge within the designated time frame are crucial for applications that require precise timing and robustness against variations in initial conditions.
On the other hand, external disturbances caused by unpredictable environmental conditions inevitably degrade system performance and may even destabilize the system. Consequently, developing robust formation control strategies for multi-UAV systems under external disturbances has become a critical research focus. In recent years, numerous robust formation control strategies have been developed to mitigate the adverse effects of external disturbances. Representative approaches include sliding mode control [
41,
42], disturbance observer-based control (DOBC) [
32,
43], and neural network-based methods [
6,
44,
45], among others. To achieve predefined-time convergence in multi-spacecraft formation systems, Zhang et al. [
46] proposed a fixed-time disturbance observer in conjunction with a distributed predefined-time formation controller. However, the settling time of the disturbance estimation error is only guaranteed to be less than the predefined time rather than exactly at it. To address mismatched disturbances and measurement errors in second-order MASs, Li et al. [
47] developed a distributed prescribed-time formation (PTF) control scheme based on integral sliding mode control. In a related effort, Jiang et al. [
48] introduced a control framework that integrates a neural network-based function approximator with a disturbance observer to handle both internal system uncertainties and external disturbances in second-order nonlinear MASs. This scheme employs a Barrier Lyapunov function and two performance functions, ensuring the system achieves bounded convergence within a prescribed time. Despite extensive research on formation control, the development of a streamlined PTF control framework for MASs subject to external disturbances and directed communication topologies remains insufficiently addressed. In particular, achieving both guaranteed convergence within a user-specified time and robust disturbance rejection poses significant theoretical and practical challenges. Such capabilities are crucial in safety-critical and time-sensitive applications, including autonomous swarm coordination, formation-based sensing, and cooperative aerial surveillance, where robustness and precise temporal performance are essential.
According to the above discussion, this paper investigates the challenge of achieving robust PTF tracking for multi-UAV systems under unknown external disturbances. The principal innovations of this work are threefold as follows:
- (1)
A novel PTF control scheme is proposed for multi-UAV systems operating under a directed communication topology and subjected to unknown external disturbances. Unlike existing approaches [
46,
47,
48] that often trade off between robustness and simplicity, the proposed method ensures that all followers, guided by a leader, converge to the desired formation within a user-specified time. The controller simultaneously guarantees prescribed-time convergence, robustness to disturbances, and structural simplicity that facilitates practical implementation.
- (2)
In contrast to finite-time and fixed-time control strategies commonly found in the literature [
27,
32], where convergence time depends on initial conditions or is bounded but not explicitly defined, the proposed scheme achieves convergence within an exact, designer-specified time. Notably, this convergence time is entirely independent of both the initial states and the selection of control parameters, thereby offering stronger predictability and making the scheme particularly suitable for time-critical applications.
- (3)
Unlike traditional prescribed-time controllers [
35,
49] that rely on time-varying control gains and often suffer from singularities near the convergence time, this paper introduces a novel prescribed-time lemma grounded in fixed-time stability theory using carefully constructed constant parameters. This formulation not only eliminates singularity issues but also significantly enhances disturbance rejection capability, thereby improving the overall robustness of the control system.
The structure of the paper is as follows.
Section 2 introduces essential preliminaries on graph theory and presents a formal problem statement. In
Section 3, a novel PTF control strategy is developed to handle external disturbances affecting the follower agents.
Section 4 demonstrates the effectiveness of the proposed approach through comprehensive simulation studies. Finally,
Section 5 summarizes the main findings and discusses potential avenues for future work.
2. Preliminaries
This section first introduces relevant concepts from graph theory and essential preliminaries required for the control design. Subsequently, the leader–follower formation tracking problem is formally formulated. These elements collectively provide the theoretical foundation for the analysis and controller development presented in the subsequent sections.
2.1. Graph Theory
Consider a weighted directed graph
that models a multi-UAV system with
N follower UAVs. Here, if each UAV represents a node,
denotes the node set,
denotes the edges set, and
represents the adjacency matrix. If UAV
i receives the information from UAV
j, that is,
,
; otherwise,
. The diagonal element
as self-loops are prohibited. The set of neighbors of agent
i is denoted as
, and its cardinality,
, represents the number of agents directly connected to agent
i. The Laplacian matrix associated with the directed graph
is defined as
, where the elements are given by
Here, the diagonal entry corresponds to the out-degree of node i, reflecting the total weight of all edges emanating from it. A directed path from node i to node j is a finite sequence of directed edges connecting distinct nodes. The graph is said to be connected if, for any pair of nodes, there exists at least one such directed path linking them.
In the leader–follower formation tracking scenario, the leader UAV is labeled as 0. The connectivity between follower UAVs and the leader UAV is encoded in the diagonal adjacency matrix , where indicates a direct adjacency from the leader to follower i; otherwise, . The overall topology information of the leader–follower multi-UAV systems is represented by .
Assumption 1. The communication topology describing the information exchange between the leader and the followers contains a directed spanning tree rooted at the leader. This implies that there exists a directed path from the leader to every follower, ensuring that information from the leader can reach all followers, either directly or indirectly.
Lemma 1 ([
50]).
Based on Assumption 1, there exists a positive definite diagonal matrix , where and each element is defined as the reciprocal of the i-th entry of . With this construction, the matrix is ensured to be symmetric and positive definite. 2.2. Useful Lemmas
To support the subsequent prescribed-time convergence analysis, the following lemmas are established as foundational tools.
Lemma 2 ([
51]).
Consider the nonlinear systemwhere denotes the system state. Suppose there exists a scalar function such that the following inequality holds:where , , and are constants. Under this condition, the origin of the system is fixed-time stable, and the upper bound of the settling time is given by Lemma 3 ([
52]).
Let and . Then the following inequality holds: 2.3. Problem Formulation
The cooperative formation control of multi-UAV systems under directed communication topologies and external disturbances presents significant challenges, particularly in scenarios with strict temporal constraints. To address these issues, this paper considers a networked system composed of one leader and
N follower UAVs, where each agent communicates over a directed interaction graph. In practice, most autonomous UAV platforms adopt a hierarchical flight control architecture consisting of an outer loop and an inner loop. The outer loop is responsible for generating position and velocity commands based on high-level mission objectives, while the inner loop stabilizes the attitude dynamics to follow the desired trajectories. This study focuses on the outer-loop control layer, which governs the cooperative motion planning and formation tracking behaviors of the UAV network, providing a clear starting point for analyzing the theoretical performance and robustness of control strategies. Accordingly, the kinematic model of the
i-th follower UAV is described as follows:
where
,
, and
represent the state, control input, and external disturbance of the
i-th follower UAV, respectively. The state vector, control input vector, and disturbance vector for all followers are denoted as
For the leader UAV, the dynamics are given by
where
represents the leader’s state and
denotes its control input.
Assumption 2. For each UAV in (5), the external disturbance is assumed to be bounded such that holds for all , where denotes an unknown but finite positive constant. Assumption 3. The leader’s control input in (6) is an unknown time-varying signal with bounded magnitude, i.e., , where represents the maximum allowable input amplitude. Remark 1. The boundedness assumption of disturbances is standard in the robust control literature and serves as a minimal requirement to ensure the well-posedness of the system under uncertainty. Importantly, the exact value of is not required in the controller design; rather, the control gains can be selected to be sufficiently large to dominate any admissible disturbance within this unknown bound. Moreover, the presence of a leader plays a pivotal role in formation control, serving as a reference that guides the collective motion and coordination of the multi-UAV system. The leader UAV is equipped with an independent control input channel, allowing real-time trajectory adjustment in response to dynamic environments. When , the leader’s trajectory is fully determined by its initial conditions. In contrast, the availability of input freedom enables the leader to actively adapt to environmental changes, such as obstacle avoidance or mission replanning, while ensuring safe and goal-directed navigation. Furthermore, the incorporation of an input saturation constraint prevents actuator overloading and ensures compatibility with practical implementation constraints.
This paper aims to design a distributed PTF controller for multi-UAV systems under directed communication topologies and unknown disturbances. The controller must ensure that all followers converge to a predefined geometric configuration relative to the leader within a user-specified time , independent of initial conditions and external disturbances, defined as follows.
Definition 1. The PTF problem of multi-UAV systems (5) and (6) is said to be achieved by introducing a control law such that given any initial states , , there exists a prescribed settling time by user, which satisfies the following equation where is the rigid desired formation vector. For the
ith UAV, if the error
is defined, then the dynamics of the error is described by
It is worth noting that the formation control problem can be reformulated as a leader-following consensus problem under a unified framework. In particular, the consensus tracking problem emerges as a special case of formation control when the desired relative formation offsets are zero, i.e., . This equivalence allows consensus-based techniques to be directly employed for formation tasks, and it also highlights that formation control generalizes consensus by incorporating nonzero formation vectors that define desired geometric configurations among agents.
Despite the well-defined problem formulation, there are several key challenges in developing PTF control for multi-UAV systems under directed topology and unknown disturbances. First, it is essential to prevent the controller from exhibiting unbounded singularities as it approaches the prescribed-time point. Second, the system’s robustness and convergence accuracy after the prescribed time must be ensured. Third, the prescribed time should be entirely determined by the user, eliminating any dependency on the initial state or design parameters. Lastly, it is necessary to simplify the complex theoretical framework to facilitate practical implementation.
4. Simulation Results
This section presents two numerical examples to verify the effectiveness of the proposed control scheme. Example 1 illustrates the prescribed-time convergence property of the multi-UAV system under two distinct sets of initial conditions. Example 2 investigates the influence of the tuning parameter on the system’s convergence performance and control effort.
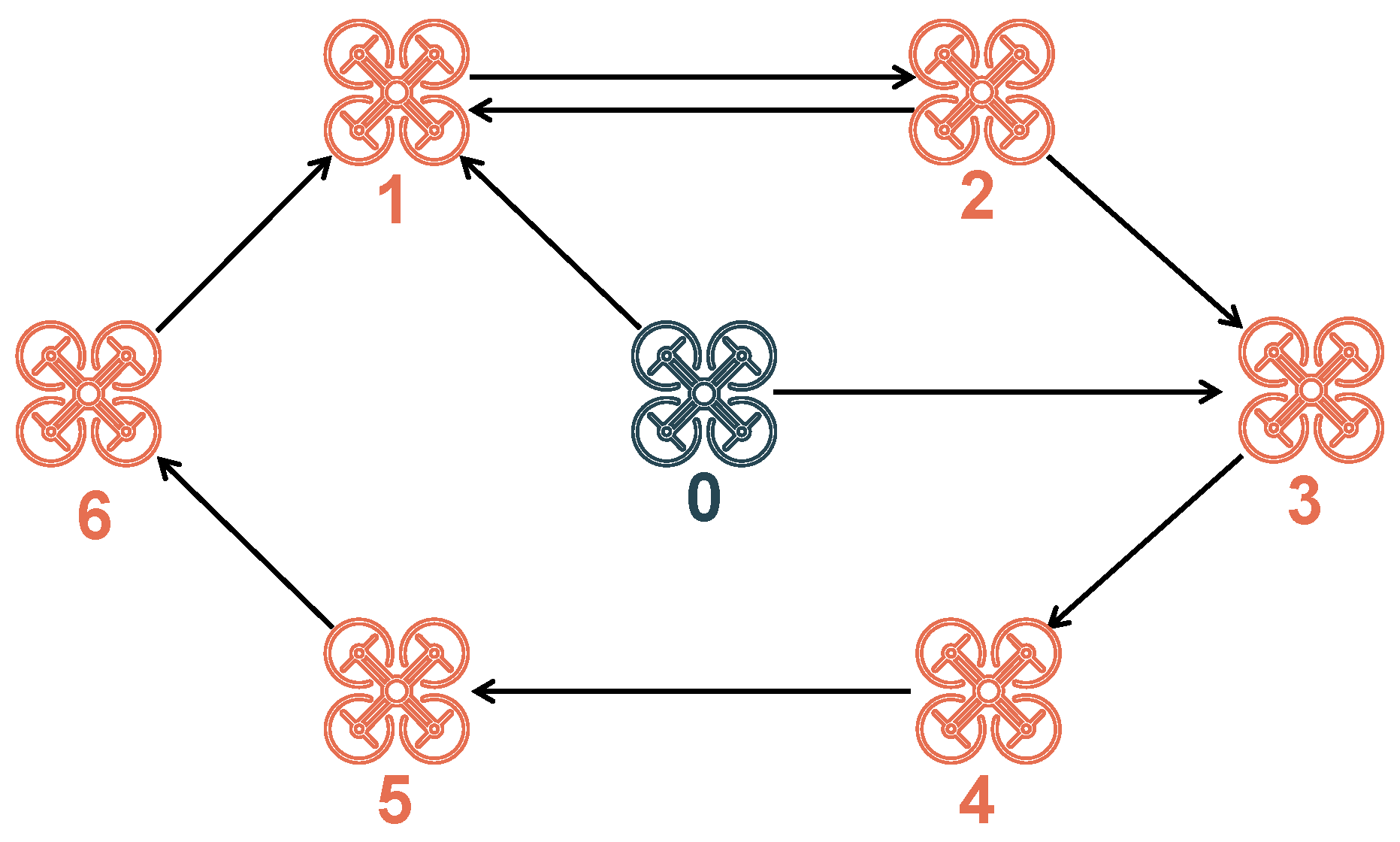
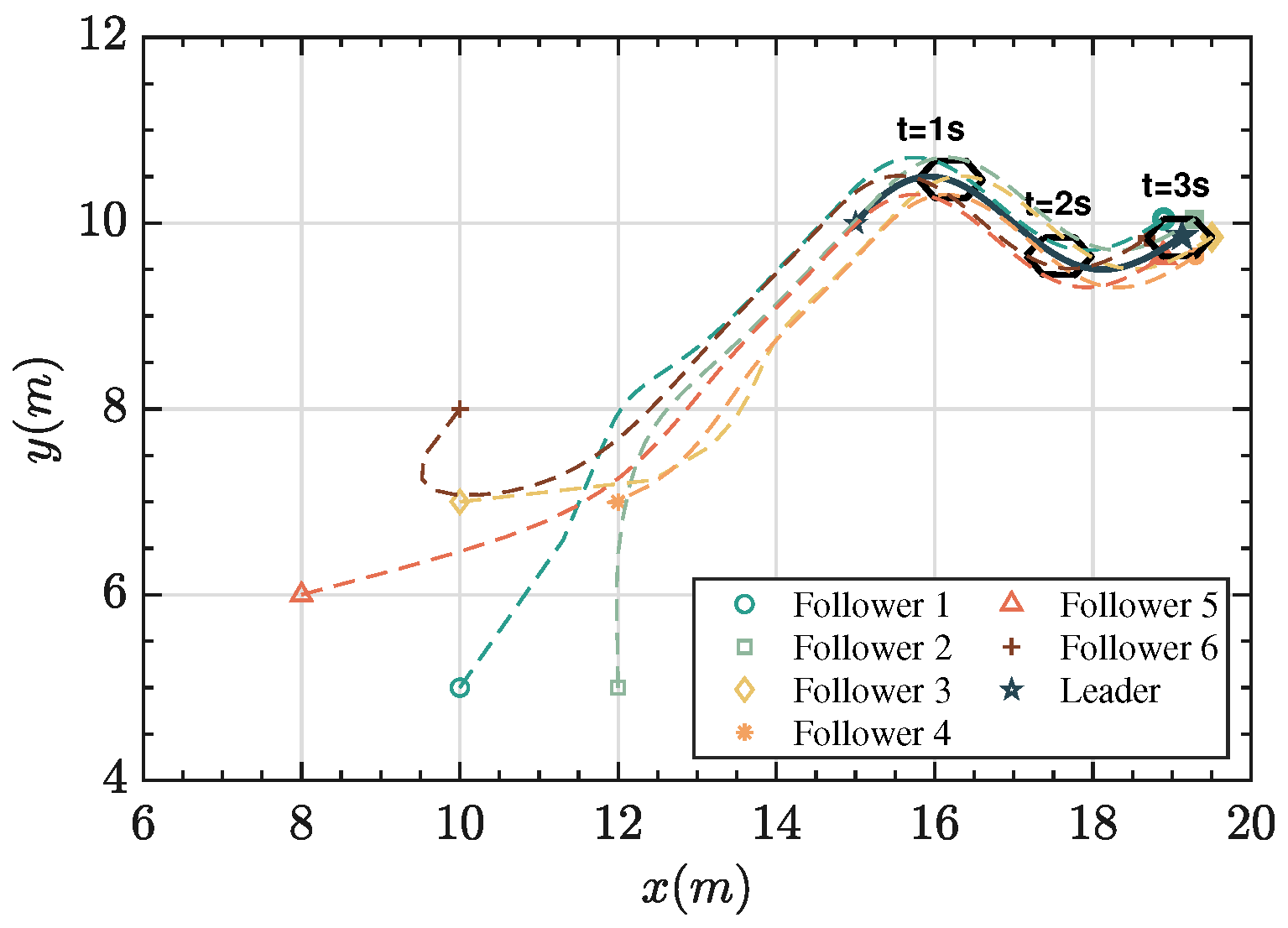
Example 1. To validate the effectiveness of the proposed PTF control protocol (13), numerical simulations are conducted on a networked multi-UAV system comprising a leader and six followers. The leader’s dynamics are governed by . Each follower is subjected to bounded external disturbances given as The directed communication graph contains a directed spanning tree rooted at the leader, as shown in Figure 2. This connectivity ensures that all followers can access the leader’s state through directed paths. The corresponding Laplacian matrix is defined as The followers are tasked with maintaining a hexagonal configuration centered around the leader. The prescribed-time is set as . Following the parameter selection criteria in Equations (19)–(21), the control parameters of the proposed PTF control protocol (13) are taken as and . To demonstrate that the prescribed time is independent of the initial states of the agents, two cases with distinct initial conditions are tested. Case 1 initializes the leader at , with followers positioned at , , , , , and . Case 2 initializes the leader at , with followers positioned at , , , , , and .
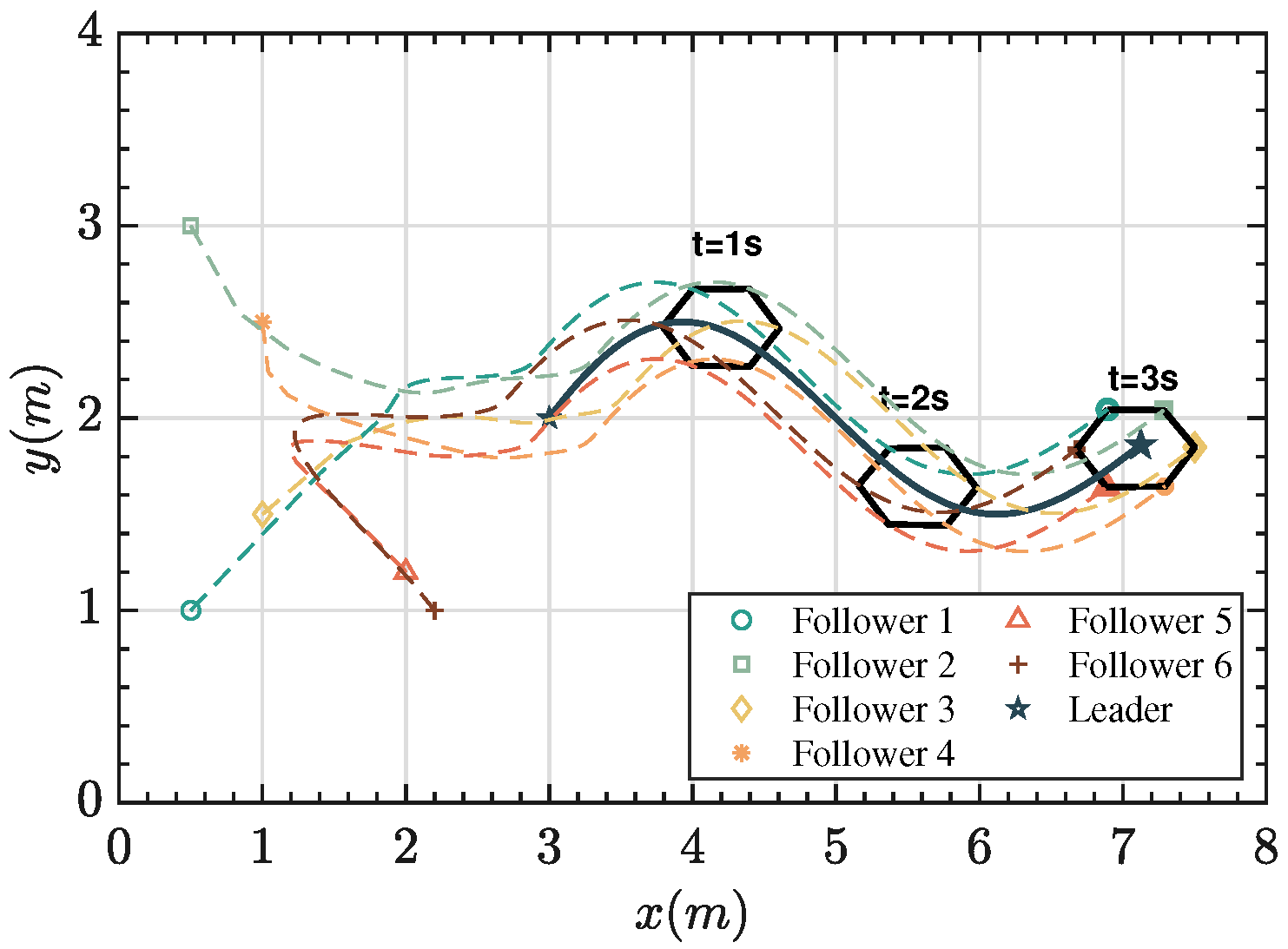
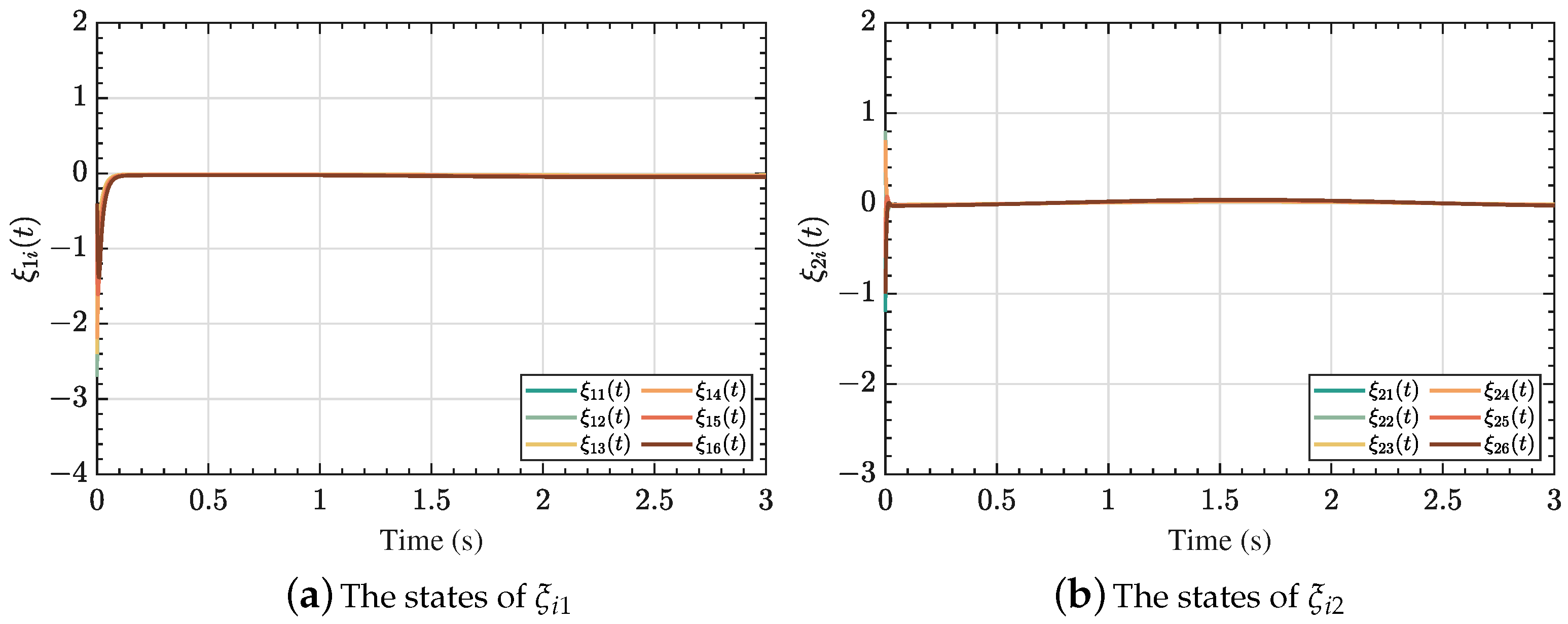
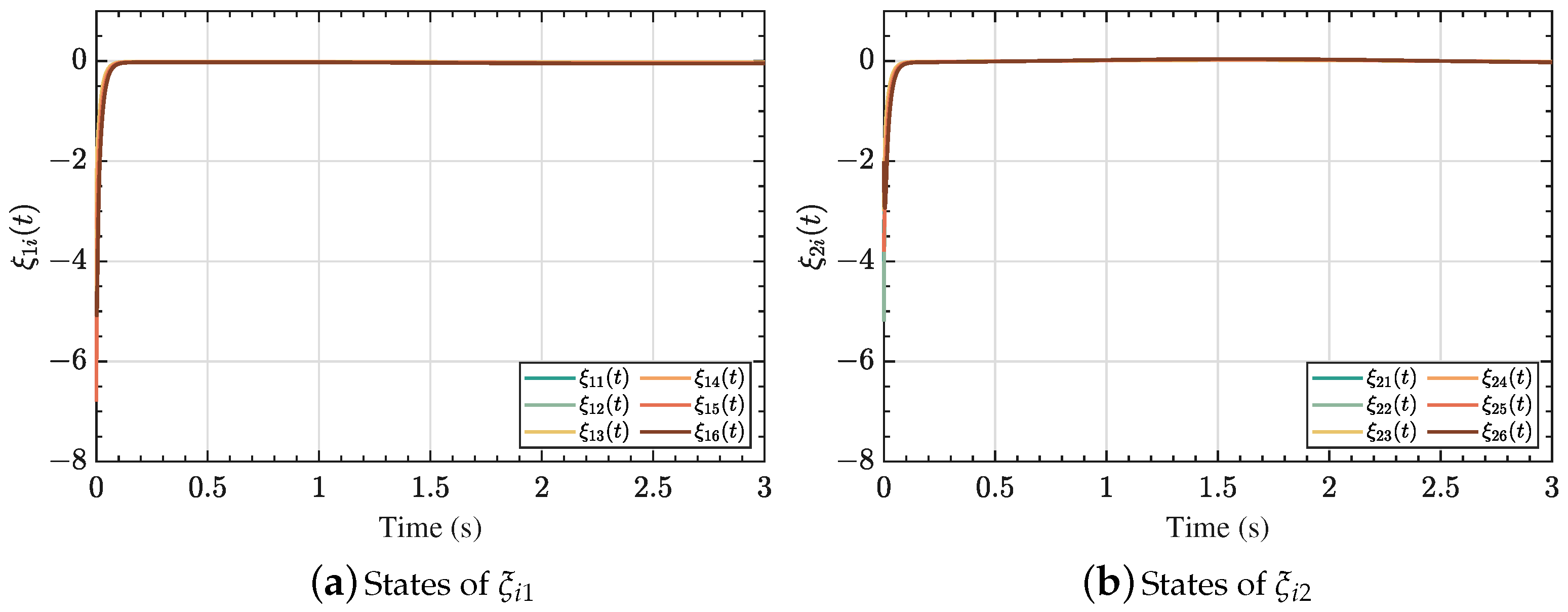
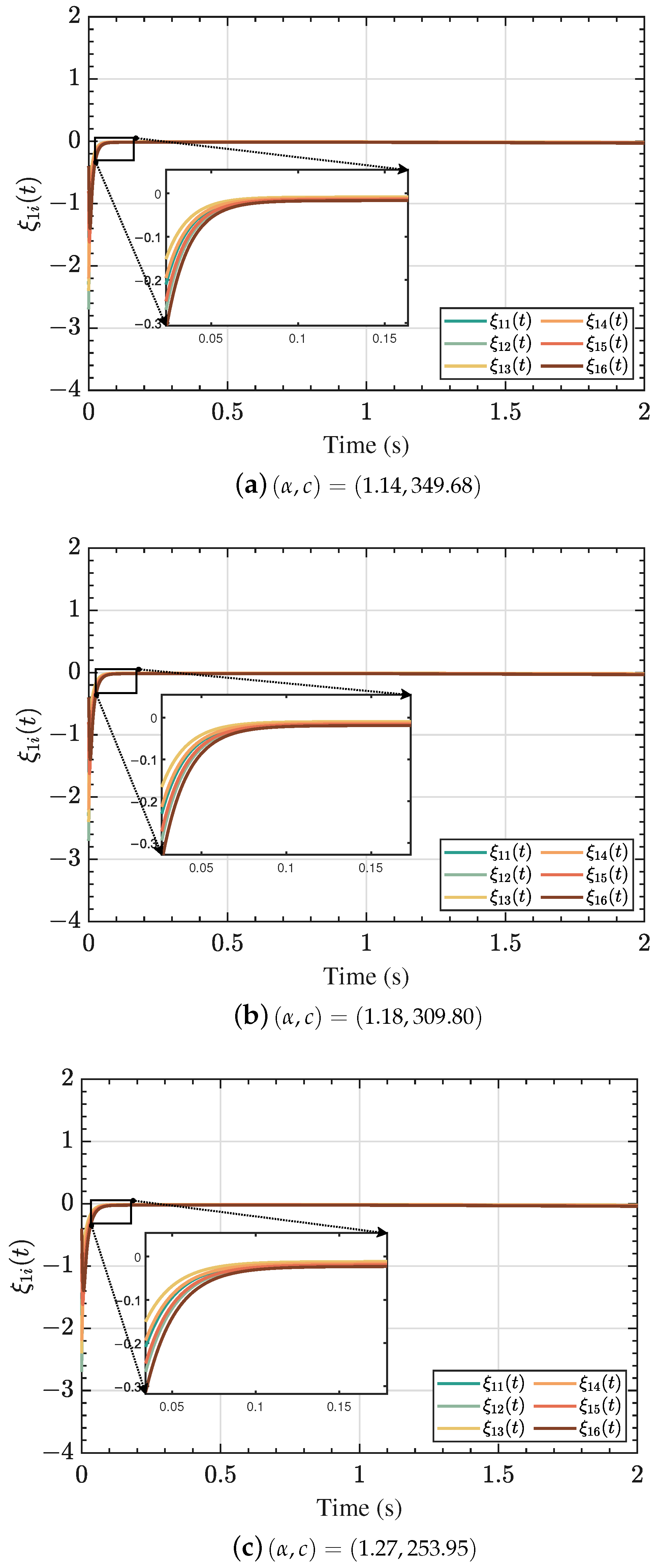
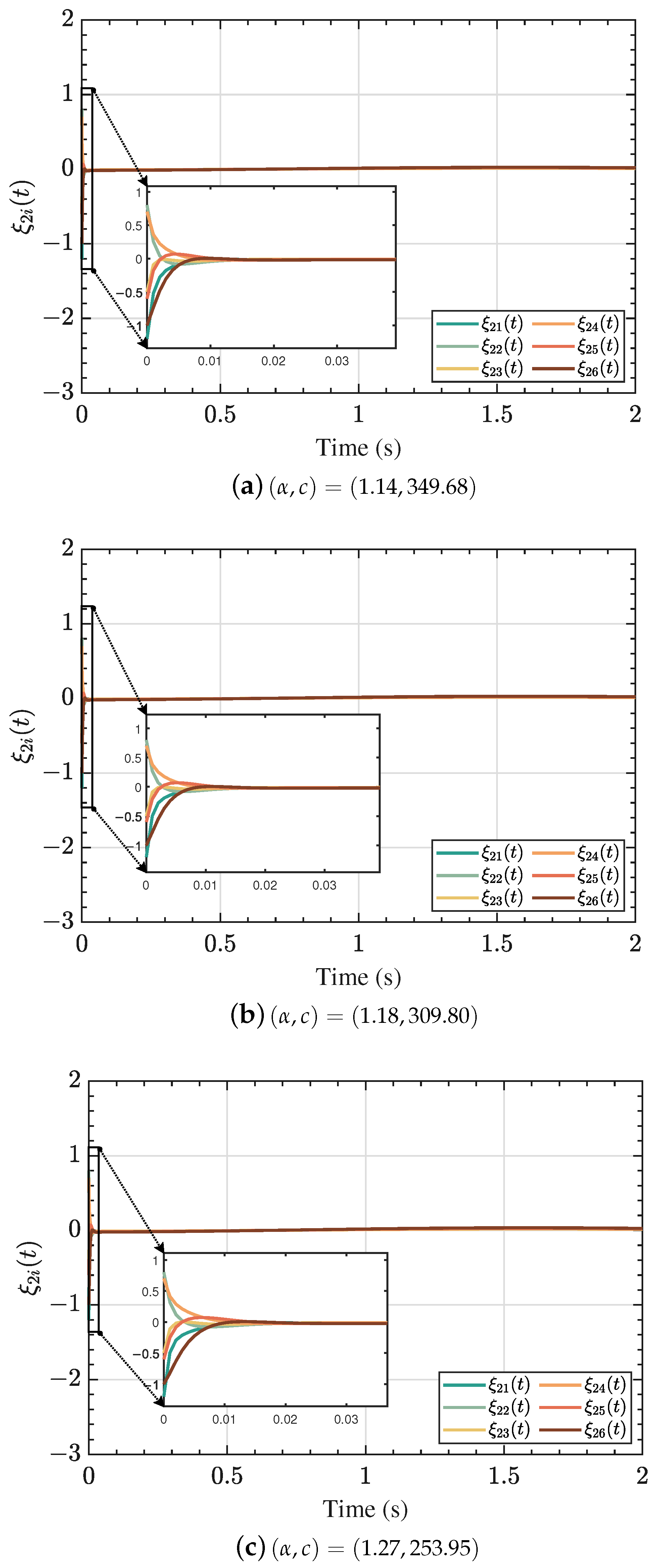
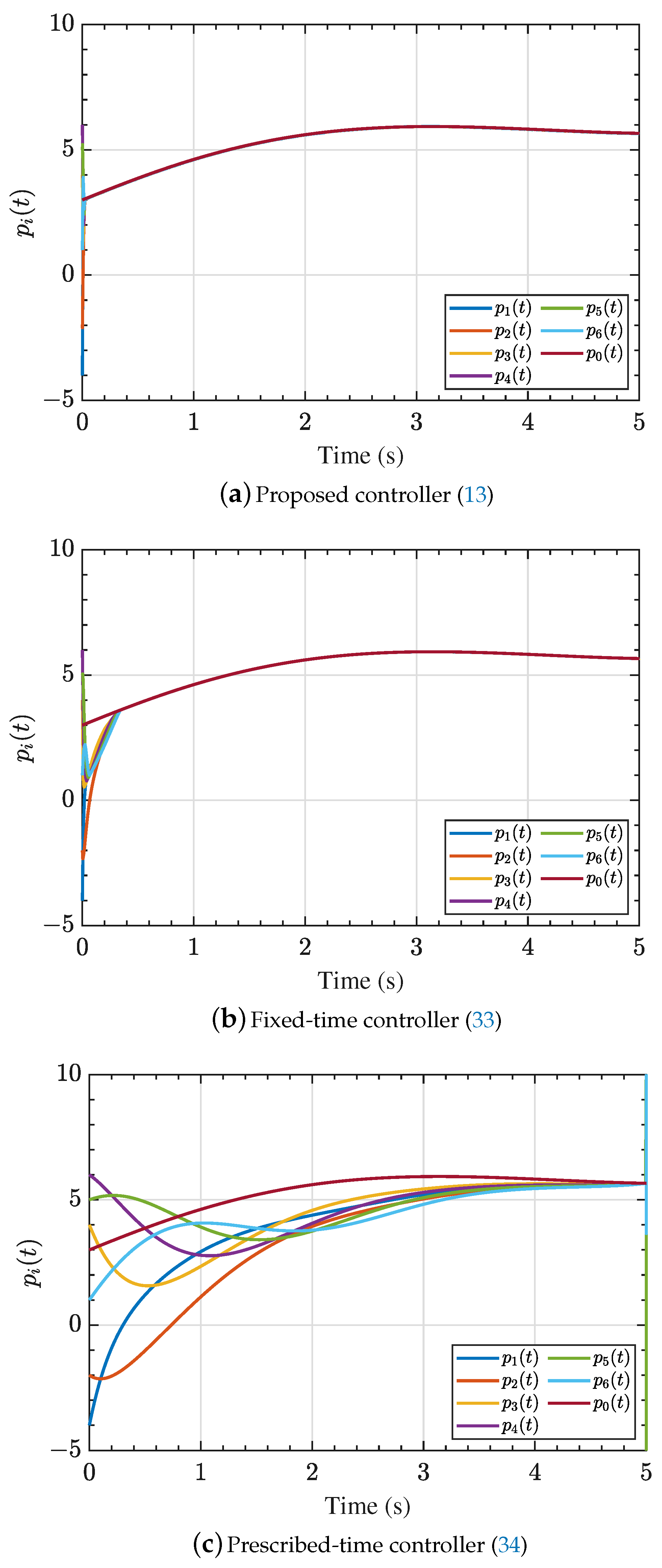
The simulation results are depicted in Figure 3, Figure 4, Figure 5 and Figure 6, from which we can clearly find out the effectiveness of the proposed PTF control law. Figure 3 illustrates the followers’ formation trajectories and the leader’s trajectory for case 1. It shows that six followers can quickly track the leader from any initial position and form a stable hexagonal formation centered around the leader within the prescribed time, . Moreover, the desired formation shape can still be maintained after the prescribed time, , even in the presence of external disturbances, confirming the robustness of the proposed control protocol and its ability to avoid singularity issues. Figure 3 shows that the formation tracking error of all agents converges to zero within the prescribed time, which well demonstrates Theorem 1 effectively. To further demonstrate that the settling time is independent of the initial state, the simulation results for Case 2 are presented in Figure 5 and Figure 6. As in Case 1, it is evident that formation tracking is achieved within . Notably, the settling times in both cases are nearly identical, underscoring the independence of the prescribed time from the initial states. This characteristic sets the proposed control protocol apart from traditional time-varying gain methods, which often encounter singularity issues. Example 2. To further investigate the impact of tuning parameter γ on the system performance and controller efficiency while keeping the prescribed time unchanged, three different values of γ are selected for simulation as follows: (1) ; (2) ; and (3) . The prescribed time is set as for all cases. The system dynamics, communication topology, and initial conditions remain the same as in case 1 of Example 1. Variations in parameter γ influence the values of , subsequently affecting the performance of the controller. Table 1 presents three sets of parameters. The simulation results are depicted in Figure 7 and Figure 8. We can see that the formation tracking errors converge to zero within the prescribed time across all cases. This confirms that the followers can quickly track the leader within the prescribed time and form a stable hexagonal formation centered around the leader. Notably, the specified prescribed-time convergence can be achieved under diverse control parameter pairs, which demonstrates that the prescribed time, as a control parameter, is entirely user-specified and independent of other control parameters. However, parameters c and α directly affect the energy consumption of the control input. Table 1 illustrates that as γ increases, control gain c decreases while exponent α exhibits non-monotonic behavior. Theoretically, larger c and α values enhance disturbance rejection and accelerate convergence but demand higher energy consumption. Therefore, according to the actual application requirements, the appropriate controller parameters can be selected by adjusting γ to balance the system performance and control efficiency. For instance, case 1 () demonstrates rapid stabilization with a high control gain . However, this configuration results in significant energy costs of , making it suitable for time-critical applications such as collision avoidance. In contrast, case 3 () achieves energy-efficient operation with reduced control gain and energy consumption . This configuration is better suited for scenarios prioritizing energy conservation over speed, such as long-term environmental monitoring. Example 3. To demonstrate the superiority of the proposed prescribed-time controller, we conducted a simulation comparison with the fixed-time controller (33) and prescribed-time controller (34) described in reference [34]. The purpose of the comparison is to highlight its superior performance in terms of convergence speed and accuracy within the prescribed time, as well as its effectiveness after the prescribed time. The comparison controllers mentioned above are as follows: For simplicity, we set the rigid desired formation vector h as a zero vector, simplifying the formation tracking problem to a leader–follower consensus problem. The topology remains consistent with Example 1. The leader’s dynamics are governed by . Each follower is subjected to bounded external disturbances given as . The initial state of the leader UAV is set as . The initial states of the followers are set as . The parameters of the comparison controllers are selected according to the guidelines in the reference, outlined as follows: , , , , , and .The prescribed time is set as .
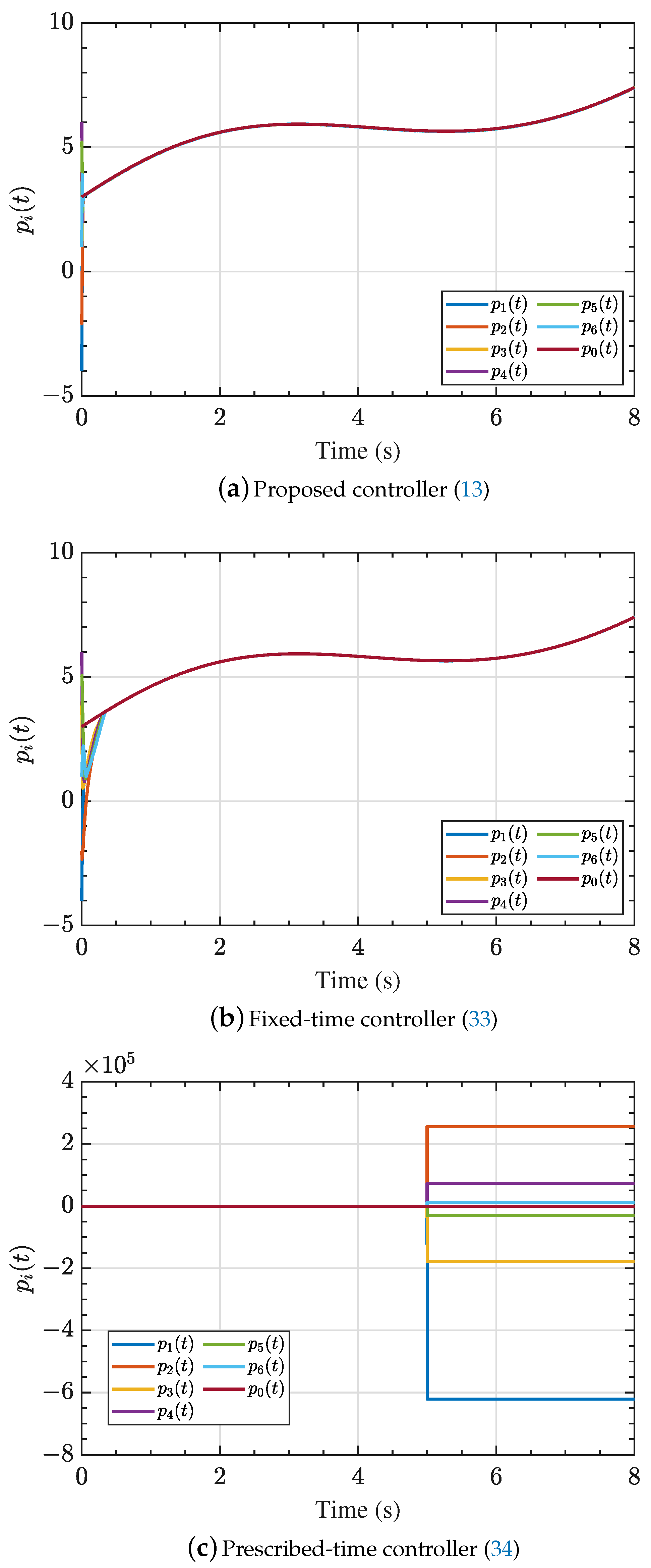
Figure 9 illustrates the trajectories of all UAVs before the prescribed time. It is evident that under all controllers, the leader–follower consensus can be successfully achieved prior to the prescribed time. Table 2 further presents a comparison of key quantitative metrics, including the settling time, tracking error, and energy consumption. The proposed controller (13) exhibits the fastest convergence rate, followed by the fixed-time controller (33), while the prescribed-time controller (34) converges exactly at the prescribed time. From the perspective of the root mean square error of the tracking error, the proposed controller demonstrates superior convergence accuracy compared to both the fixed-time controller (33) and the prescribed-time controller (34). This is attributed to the larger control inputs utilized by the proposed controller, which drive the system to converge more rapidly toward the target trajectory. However, the prescribed-time controller (34) exhibits the highest control energy consumption due to infinite control gain at the prescribed-time point. To further validate the robustness and effectiveness of the proposed controller (13) after the prescribed time, the simulation time is extended to 8 s. Traditional prescribed-time controllers (34) are generally defined only before the prescribed time, and their control actions are set to zero thereafter. Figure 10 shows the trajectories of all UAVs after the prescribed time. It can be observed that, even in the presence of external disturbances, the proposed controller remains effective throughout the entire time domain. In contrast, the prescribed-time controller (34) results in a discontinuity in the follower’s state at the prescribed time. After the prescribed time, this controller fails to suppress disturbances and accurately track the leader. This demonstrates the robustness of the proposed control protocol and its ability to avoid singularity issues. In comparison with the fixed-time controller (33), although it maintains leader–follower consensus after the prescribed time, it lacks guidelines for selecting controller parameters that depend on the prescribed time. In summary, the proposed controller exhibits superior robustness and effectiveness, particularly in terms of parameter tuning, disturbance rejection, and avoidance of control singularities. 5. Conclusions
This paper has developed a new control scheme to address the PTF tracking problem for multi-UAV systems under external disturbances and directed communication topologies. A novel prescribed-time stability result was established by extending fixed-time stability theory through parameterized Lyapunov design, enabling singularity-free convergence within a user-defined finite time. Based on this theoretical foundation, a robust PTF controller was constructed to ensure convergence under directed topologies and disturbance conditions. Rigorous Lyapunov-based analysis and graph-theoretic tools were employed to establish the stability of the closed-loop system. Numerical simulations further validated the proposed approach, demonstrating that the formation tracking errors converge to zero within the prescribed time and the desired formation configuration is maintained despite disturbances beyond this time. Notably, the prescribed-time convergence is independent of initial conditions and control parameters, enhancing predictability and implementation robustness. Moreover, the controller includes a tunable parameter, , which enables flexible adjustment between transient performance and control effort based on specific application requirements.
Future research will aim to extend the proposed control framework to a broader class of dynamical systems beyond the first-order model considered in this study. In particular, efforts will be directed toward the development of resilient and adaptive control protocols capable of relaxing some of the current structural assumptions, such as the boundedness of external disturbances and the idealized communication topology. Addressing challenges posed by unbounded or rapidly varying disturbances, intermittent communication, and potential denial-of-service (DoS) attacks will be essential for enhancing system robustness in adversarial or highly dynamic environments. In addition, future work will involve the implementation and validation of the proposed control scheme on real-world hardware platforms, such as quadrotor UAVs or robotic swarms, to assess its performance under practical constraints including sensor noise, actuator saturation, and computational limitations. These experimental efforts will bridge the gap between theoretical analysis and field deployment, thereby demonstrating the applicability and scalability of the proposed PTF tracking method in complex, uncertain, and time-sensitive mission scenarios.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}