
Deterring Street Crimes Using Aerial Police: Data-Driven Joint Station Deployment and Patrol Path Planning for Policing UAVs


Abstract
1. Introduction
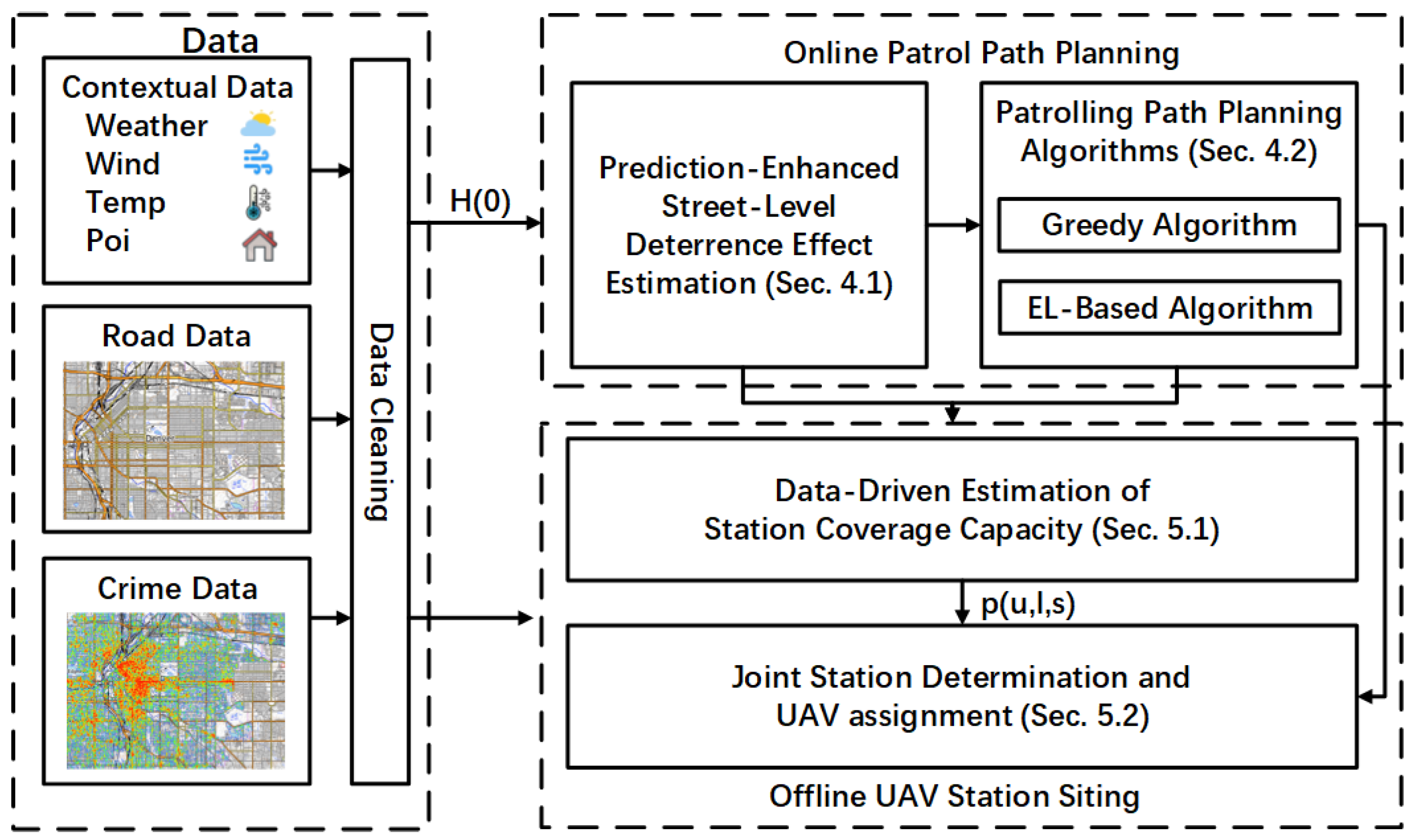
- This work conducts the first comprehensive work on street crime deterring using the policing UAVs to patrol. A data-driven patrol framework with an online UAV patrol path planning module and an offline UAV station siting module is proposed to, respectively, tackle the two fundamental problems above.
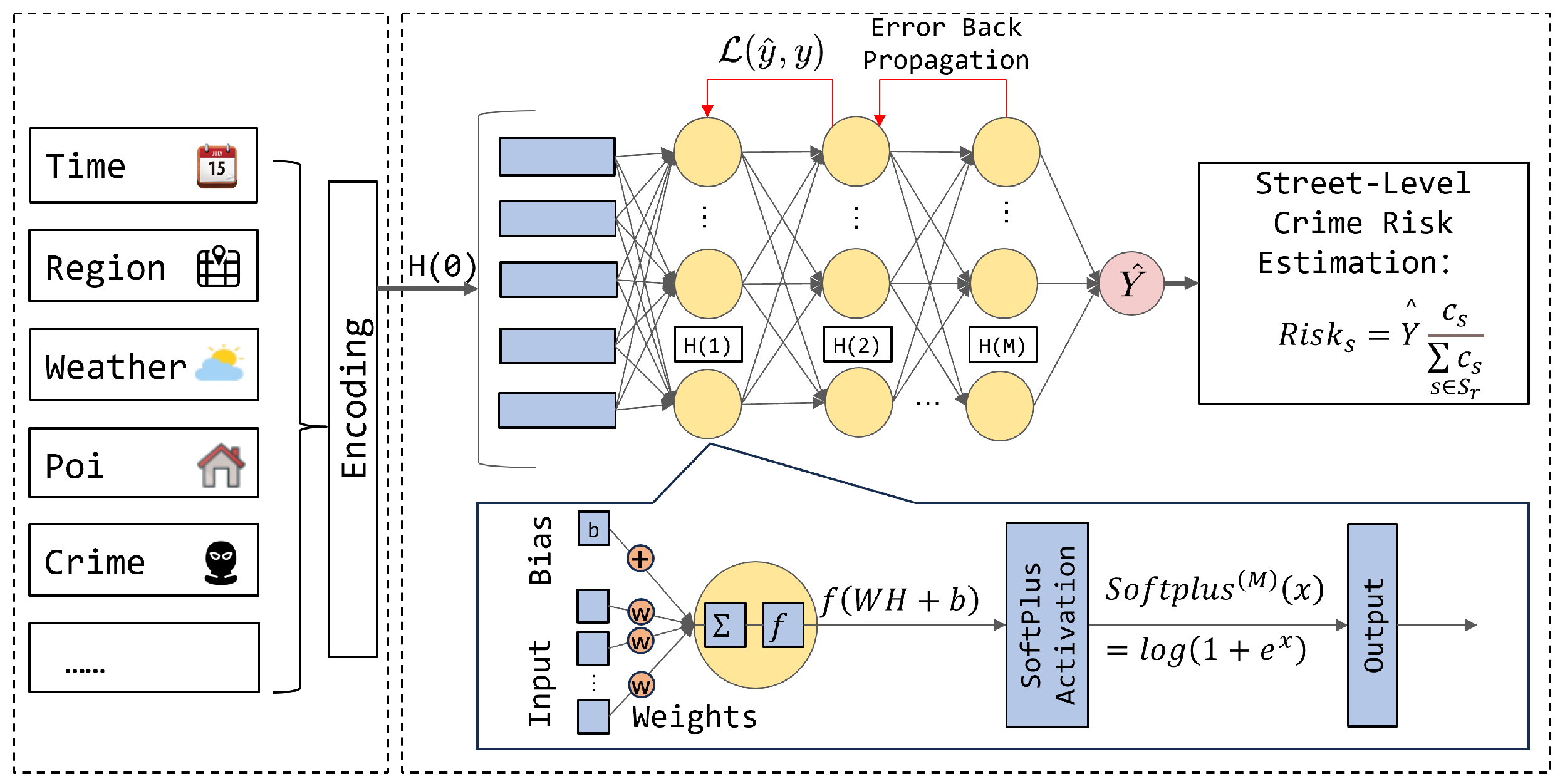
- The online module introduces a multi-layer perception model to capture fine-grained spatiotemporal crime risks and extend classical submodular optimization algorithms [19,20] to handle multi-UAV coordination under routing constraints. The Prediction-Enhanced Greedy Algorithm (PGA) incorporates marginal reward functions to balance risk prioritization and energy efficiency, while the Prediction-Enhanced Evolutionary-Learning Based Algorithm (PEA) adapts genetic operators to optimize path diversity—addressing the critical challenge of scaling single-agent algorithms to multi-UAV systems, a limitation in the existing UAV patrol literature. We have found that in this problem, PEA performs well at a small scale (e.g., UAV count ≤ 5). However, as the problem scales to larger deployments (UAV count > 10), PGA demonstrates significantly better scalability and solution quality, attributed to its deterministic greedy selection mechanism that reduces computational overhead while maintaining deterrence coverage.
- In the offline module, a historical data-driven method is designed to estimate the deterring capacity of the candidate station locations and different numbers. The station siting and UAV assignment problem is modeled as a subset selection problem with UAV assignment constraints. A heuristic algorithm is leveraged to solve the problem, which allocates UAVs to stations with the highest deterrence coverage gain while satisfying physical constraints, bridging the gap between theoretical optimization and real-world deployment feasibility.
2. Related Work
2.1. Application of UAVs in Police and Other Applications
2.2. Crime Reduction
2.2.1. Police Patrol for Crime Reduction
2.2.2. Deterring Crimes by Cameras
2.2.3. Crime Prediction
2.3. Summary
3. Preliminary
3.1. Datasets and Preliminary Analysis
3.1.1. Crime Dataset
3.1.2. Street Network
3.1.3. Contextual Weather Dataset
3.1.4. Contextual PoI Dataset
3.2. Preliminary Analysis
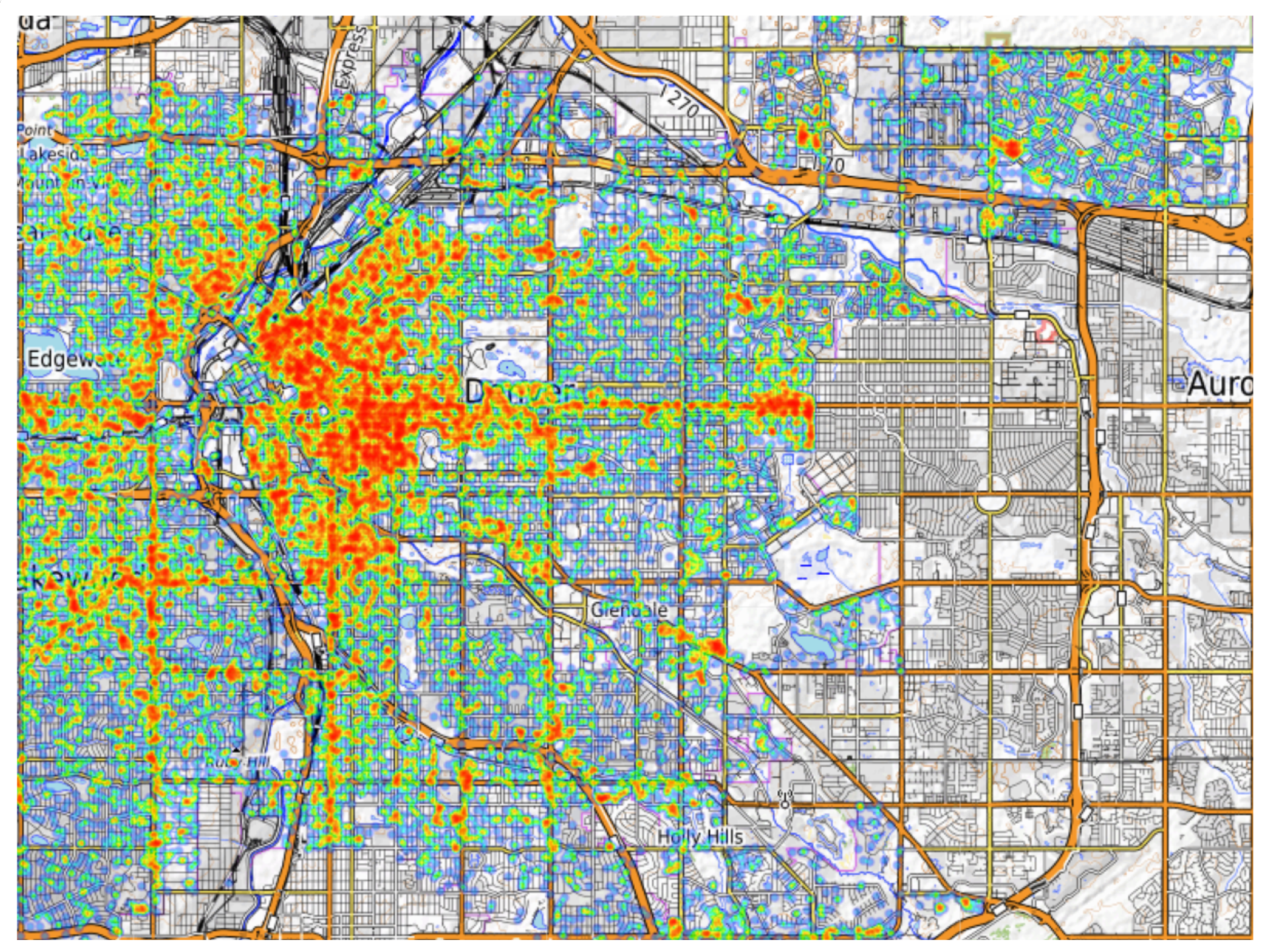
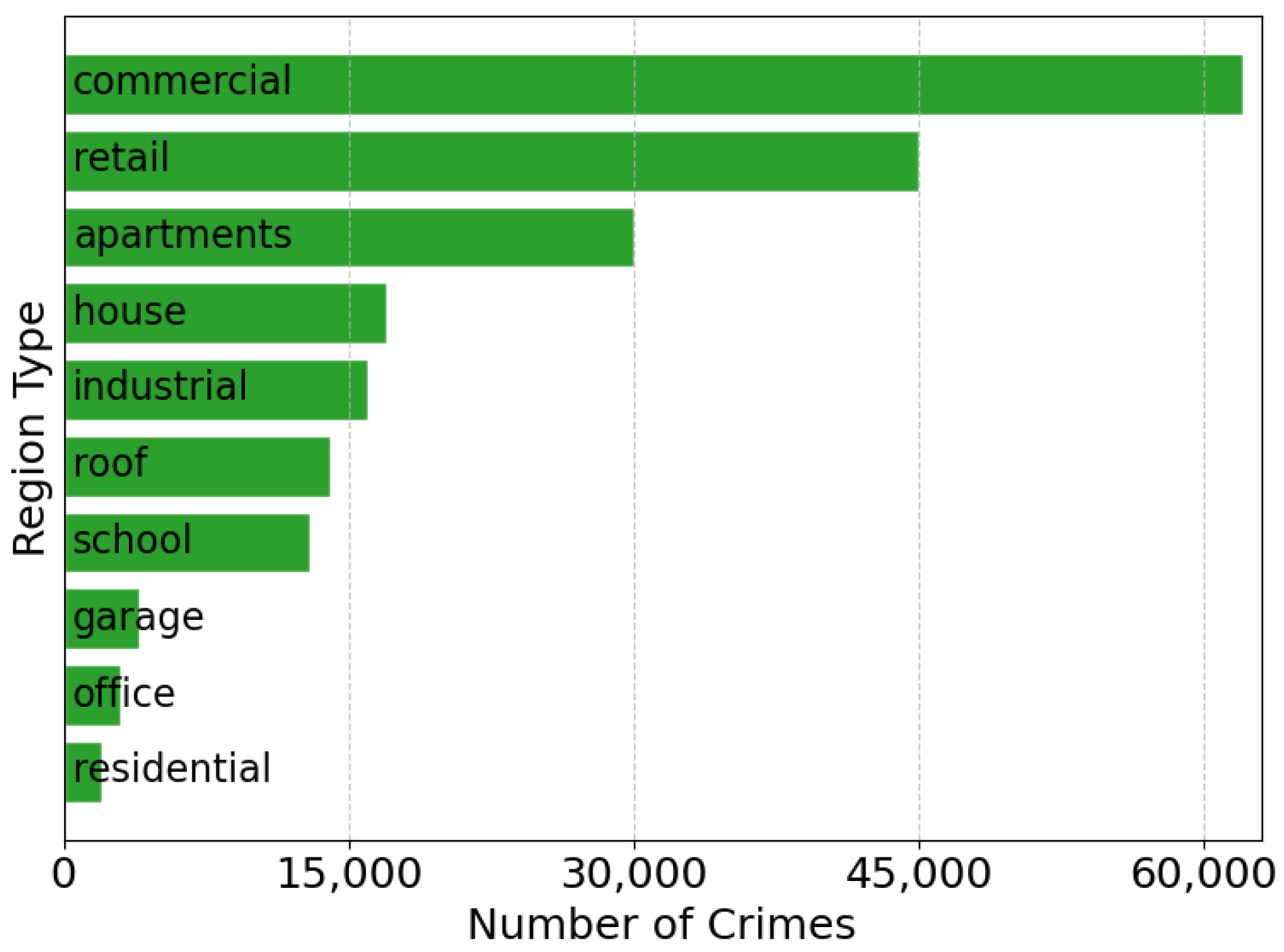
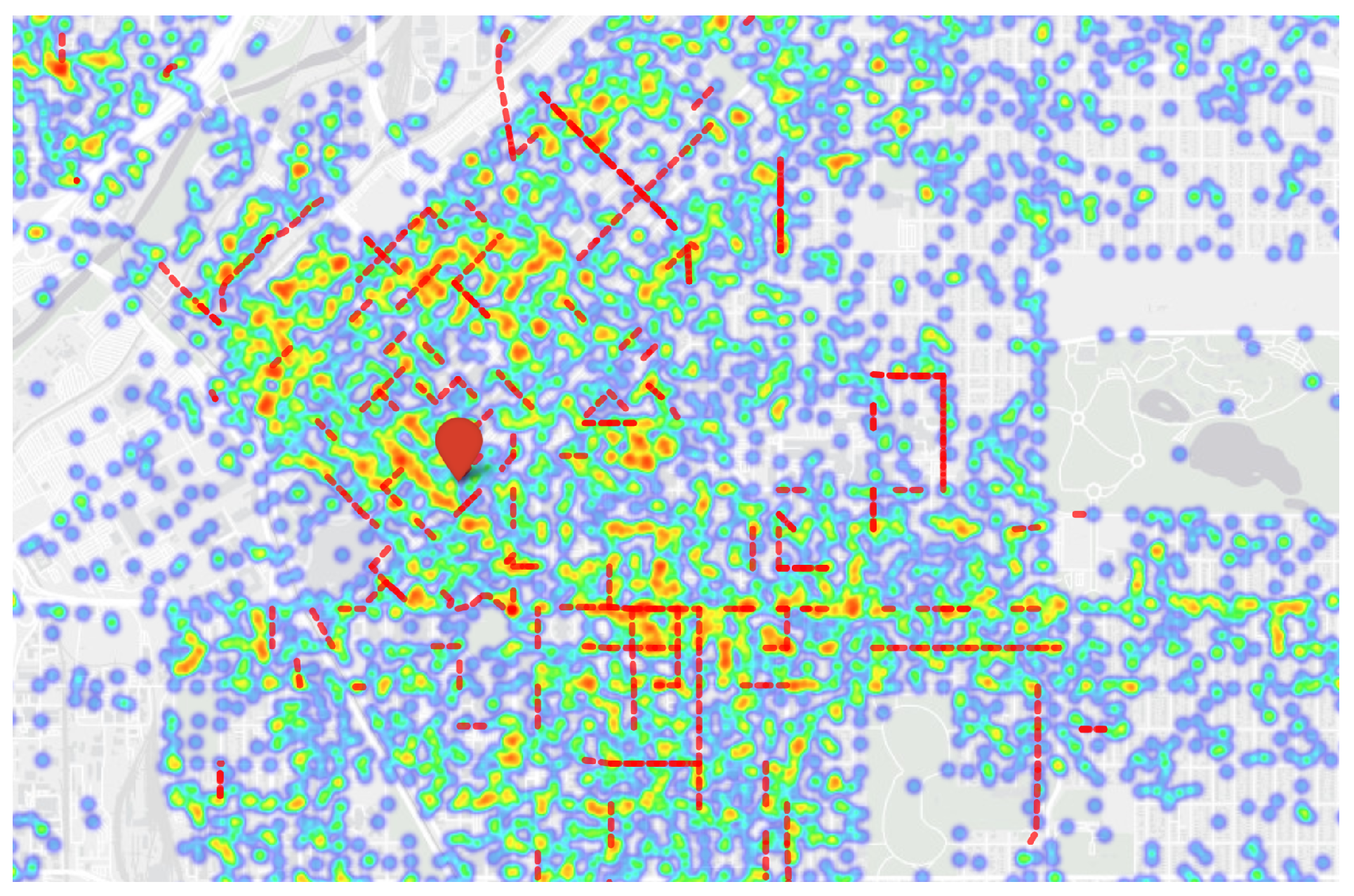
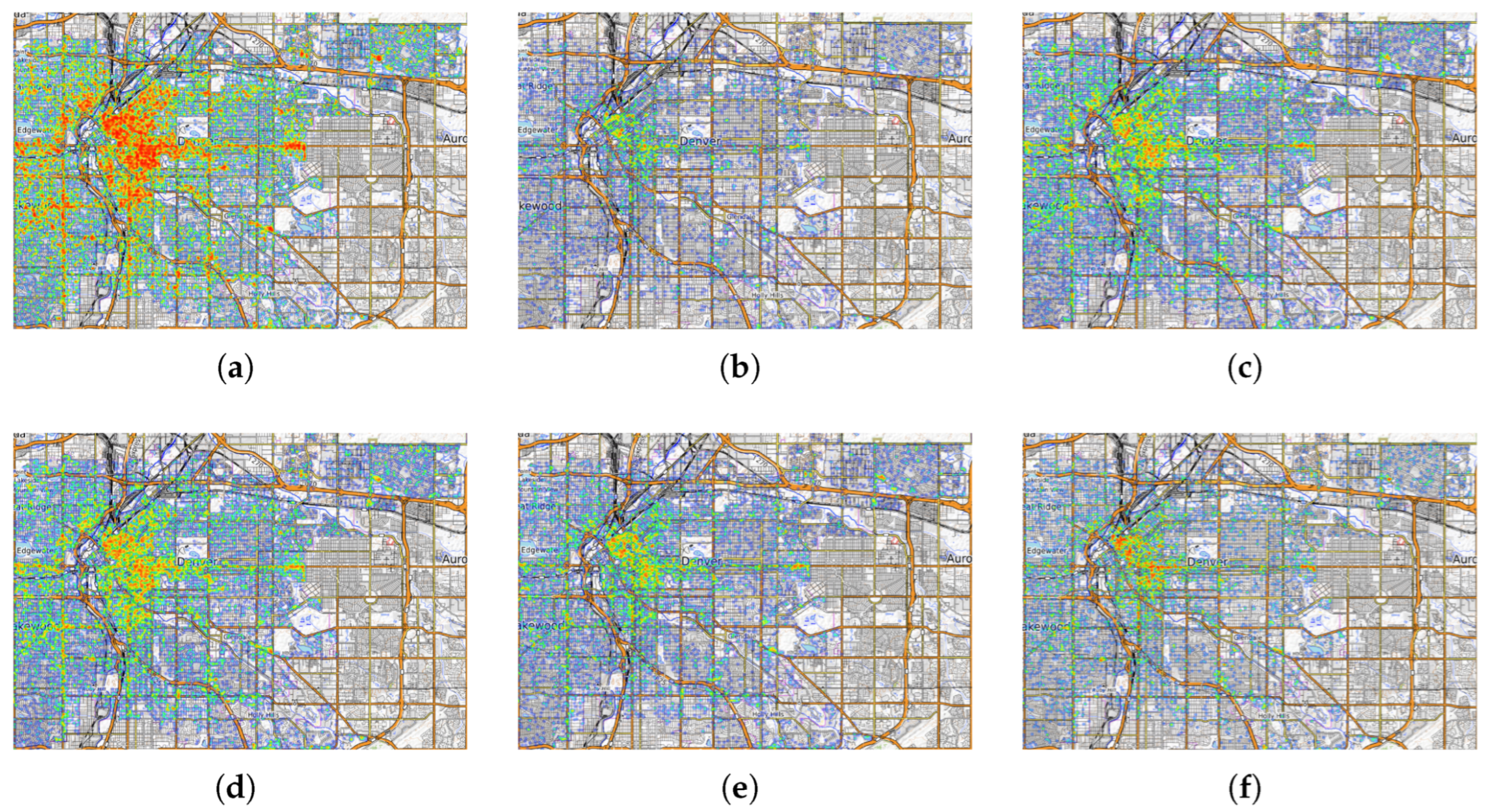
3.2.1. Spatial Distribution of Crimes
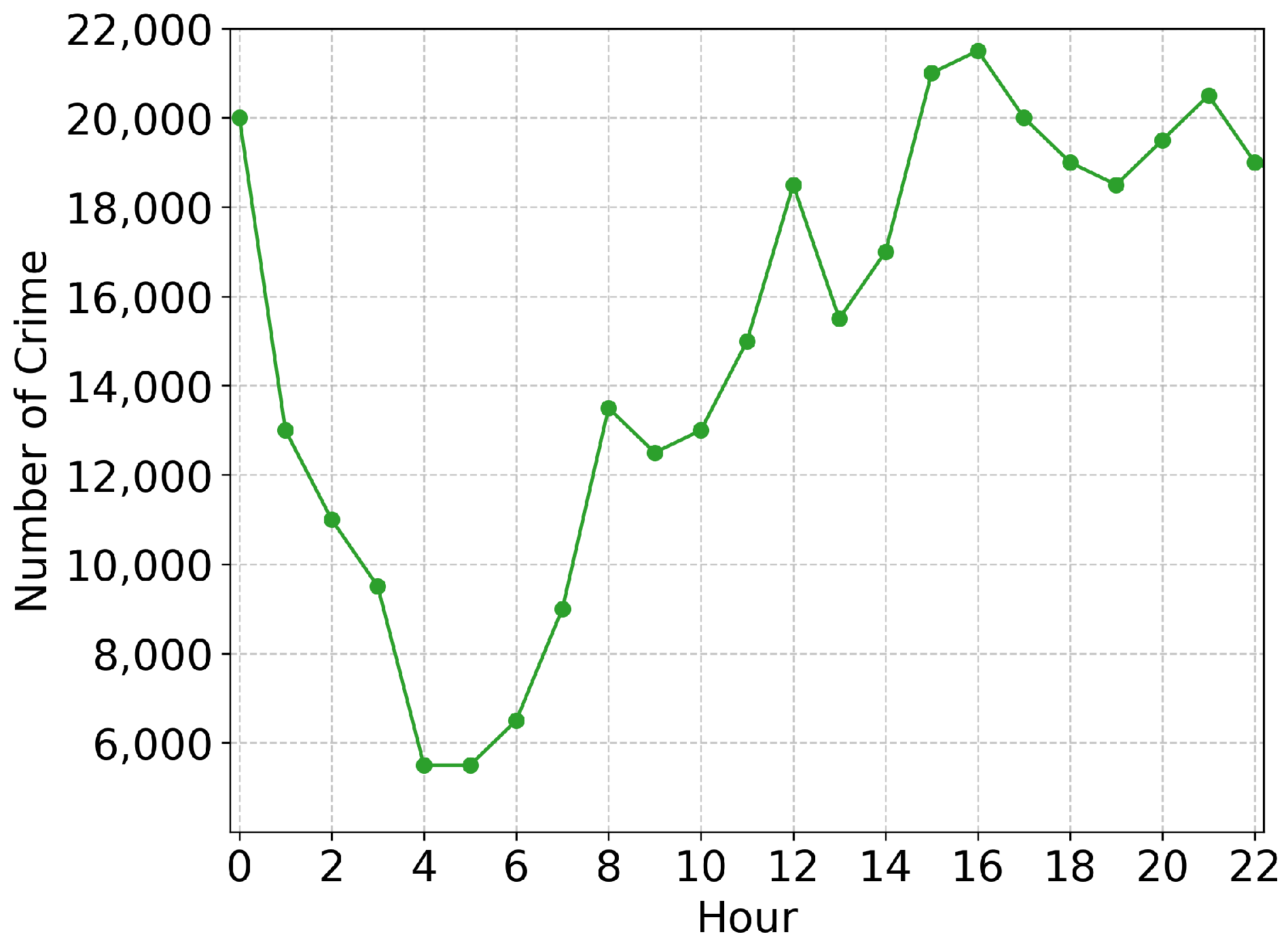
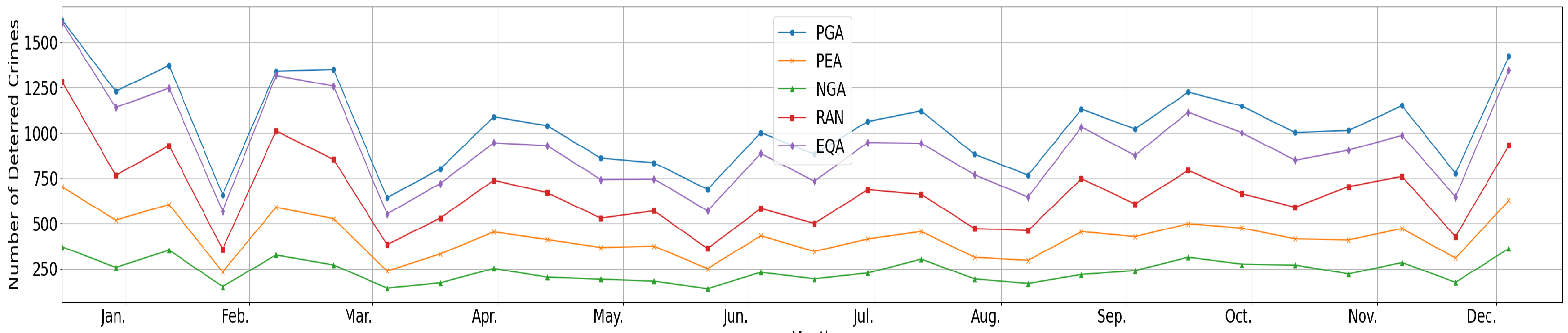
3.2.2. Temporal Distribution of Crimes
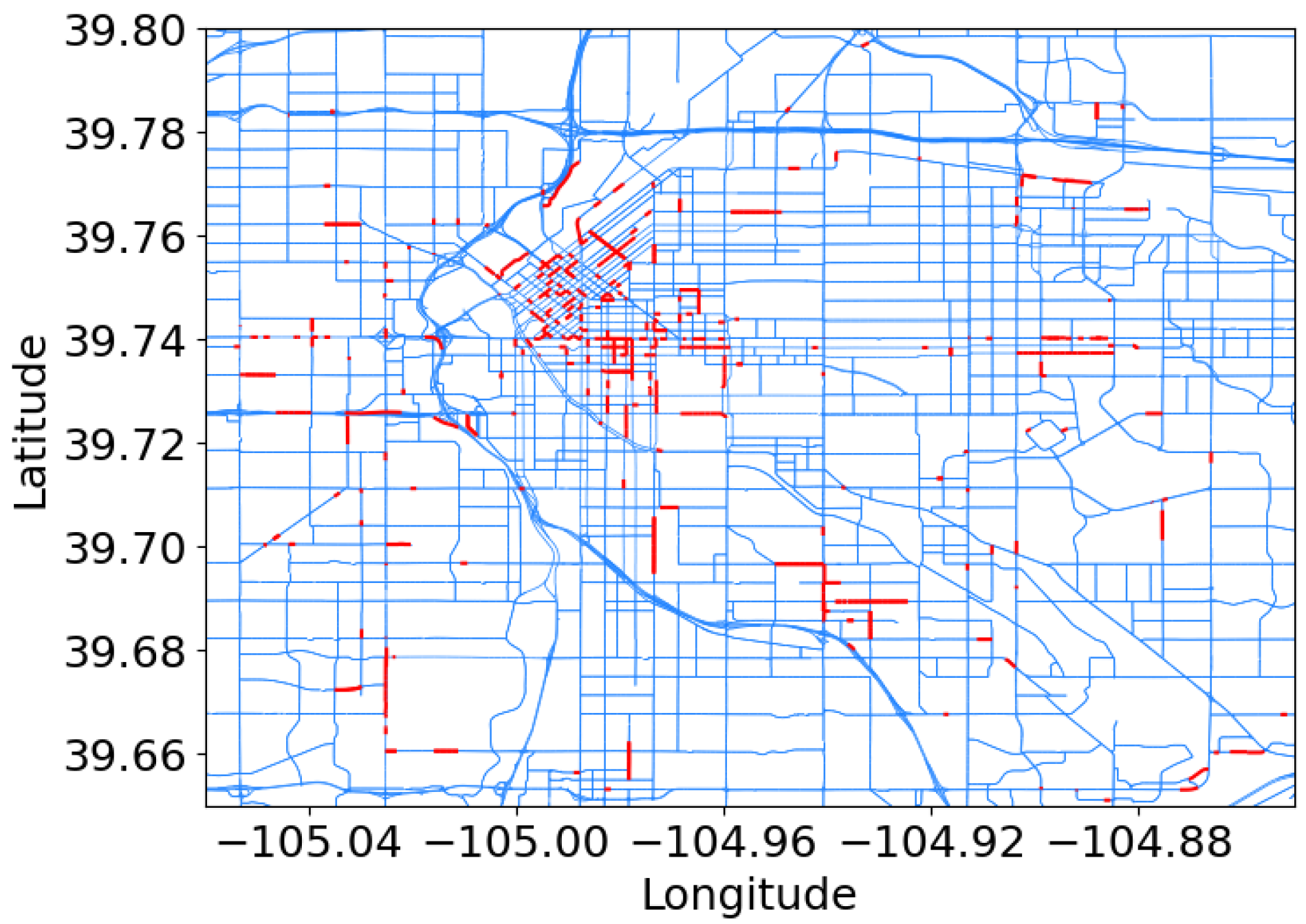
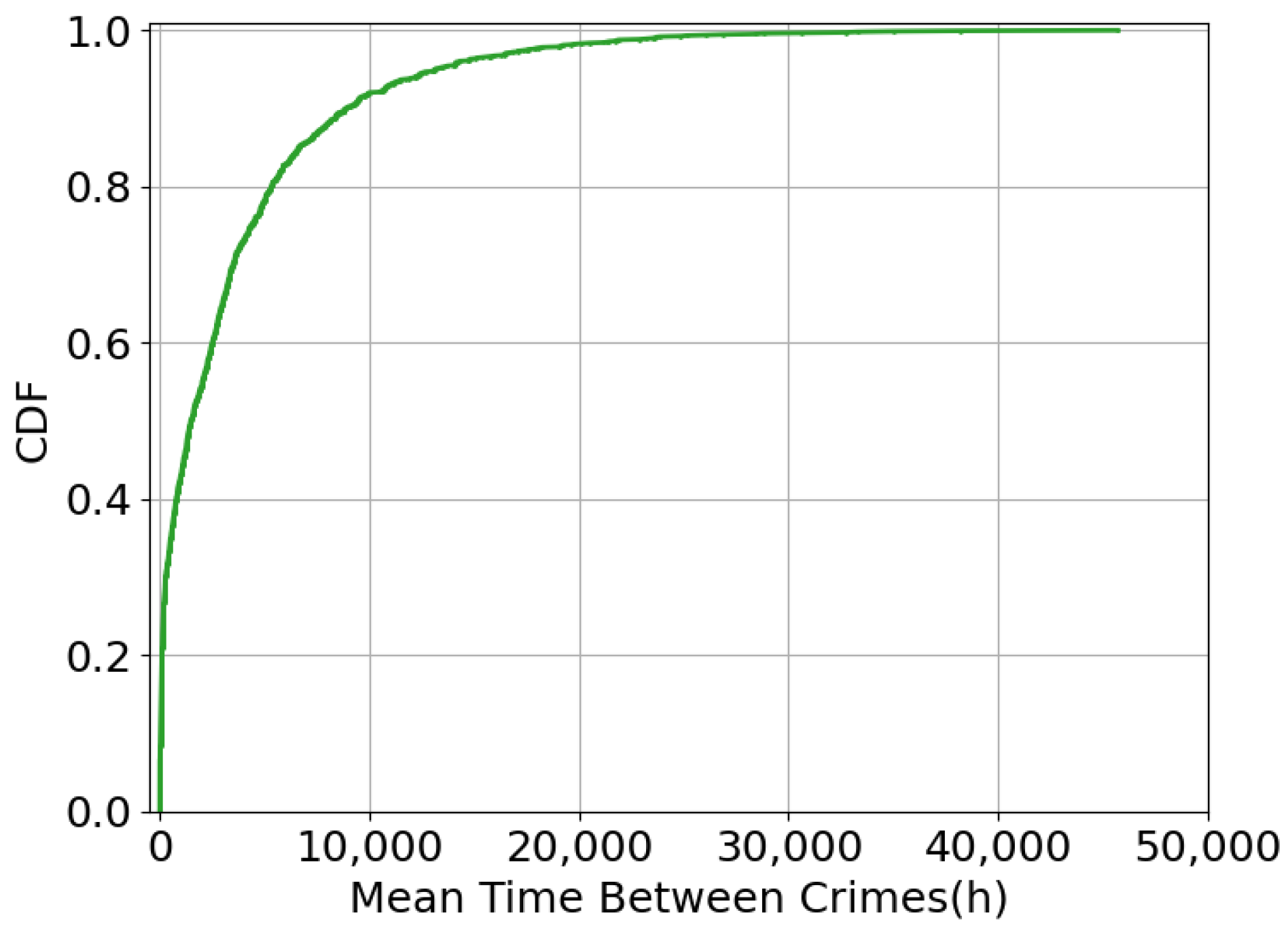
3.2.3. Relationship Between Street Length and Crime
3.3. UAV Patrol Scenario and Problem Statement
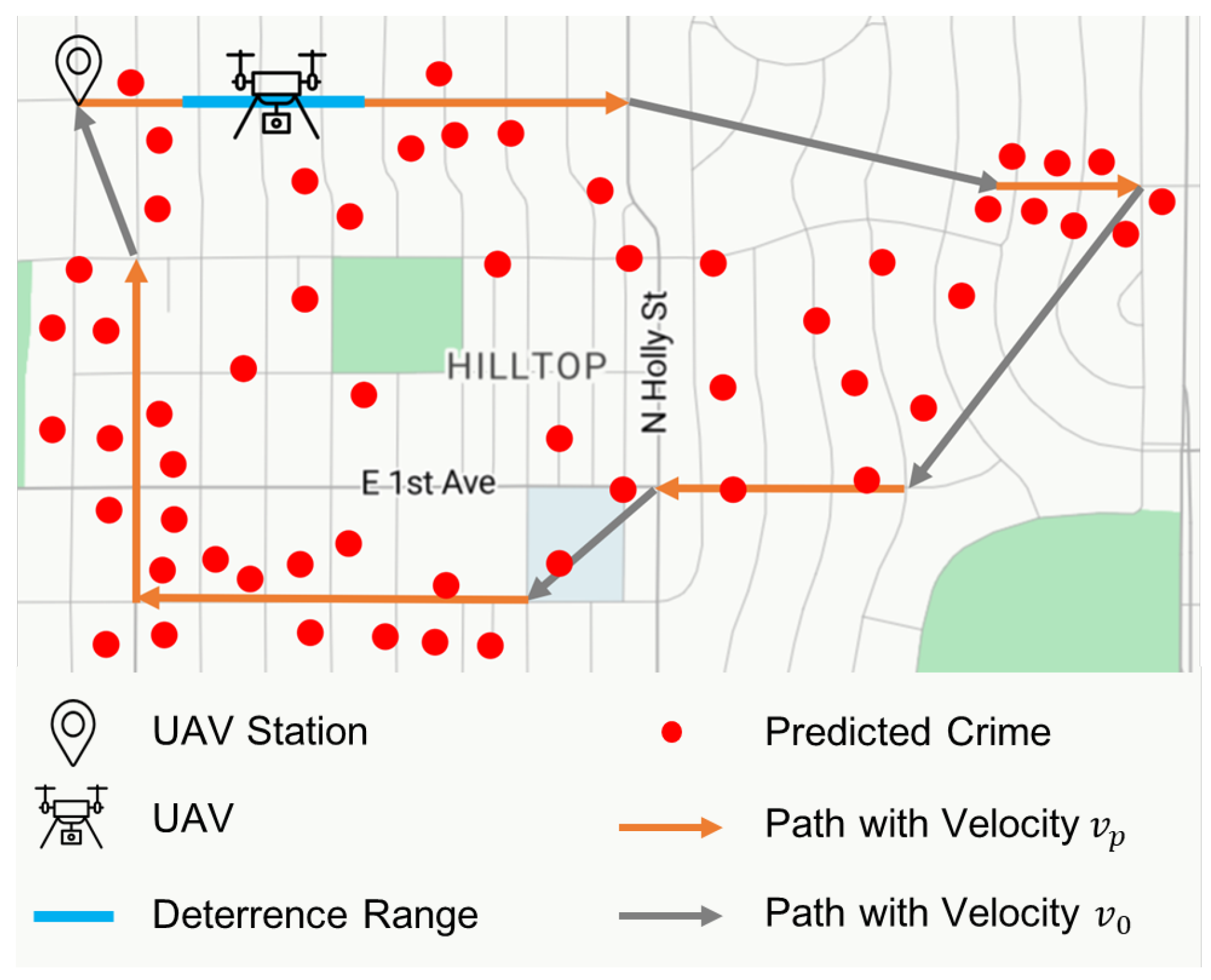
- The UAV departs from its station after being fully charged;
- The UAV flies to a high-risk street with its maximum velocity ;
- After arriving at the street, it patrols along the street with the patrol velocity:where R is DR, is EDT, and the operator guarantees that the deterring speed is smaller than the UAV’s maximum speed ;
- After deterring along the street, it seeks another high-risk street if its battery is sufficient, or returns to its station for energy replenishment if its battery is insufficient;
- It repeats the deterring process above to maximize the total deterring effect;
- When encountering unexpected events, UAVs are programmed to automatically alert the central dispatch center via real-time video/audio feeds and GPS coordinates and maintain overwatch of the incident area until ground units arrive.
3.4. Framework
3.4.1. Data Module
3.4.2. Online Patrol Path Planning Module
3.4.3. Offline UAV Station Siting Module
4. Online Patrol Path Planning
4.1. Prediction-Enhanced Street-Level Crime Risk Prediction
4.2. Patrol Path Planning Algorithms
4.2.1. Greedy Algorithm
4.2.2. EL-Based Algorithm
- Chromosome Initialization: To improve the efficiency of the search process, the initialization is performed using a weighted probability approach. Each street is assigned a weight based on its crime risk, which is divided by its distance from the initial point of the UAV’s flight path. The higher the weight, the higher the probability that the street will be selected to form a part of a patrol path of a UAV. This heuristic ensures that streets with high crime risk and those closer to the initial point are more likely to be selected, guiding the algorithm towards streets that could have a higher crime risk.
- Selection: The quality of a patrol path for each UAV is estimated using a fitting function, which takes into account both the crime risk and the length of the streets along the path. The fitness function is defined as:where is the crime risk of street s from chromosome path and is the length of that street. The selection step involves choosing the Top- patrol paths with the highest fitness values. These paths are the most promising candidates for the next generation of patrol routes.
- Crossover: In this step, the streets of two selected parent paths are combined to produce new offspring paths. To introduce diversity into the population and prevent premature convergence, a heuristic method is applied during the crossover process. Two streets are randomly selected from the parent paths. If the distance between these two streets is smaller than a given threshold, they are chosen for a single-point crossover. If the distance is greater than the threshold, a new pair of streets is selected, and the process is repeated. This ensures that the crossover is meaningful in terms of the geographical proximity of the streets being combined, which enhances the practicality of the generated paths.
- Mutation: For each newly generated patrol path, each street may be subject to mutation with a certain probability. If a street is selected for mutation, it is replaced by a nearby street, where the replacement is made within a specified distance threshold. After the mutation, the fitting function of the new path is recalculated to evaluate its quality. The mutation step introduces further diversity into the population, allowing the algorithm to explore a wider search space.
5. Offline UAV Station Siting
5.1. Data-Driven Estimation of Station Deterring Capacity
5.2. Joint Station Determination and UAV Assignment
| Algorithm 1 The algorithm for joint station determination and UAV assignment |
|
6. Performance Evaluation
6.1. Experiment Settings
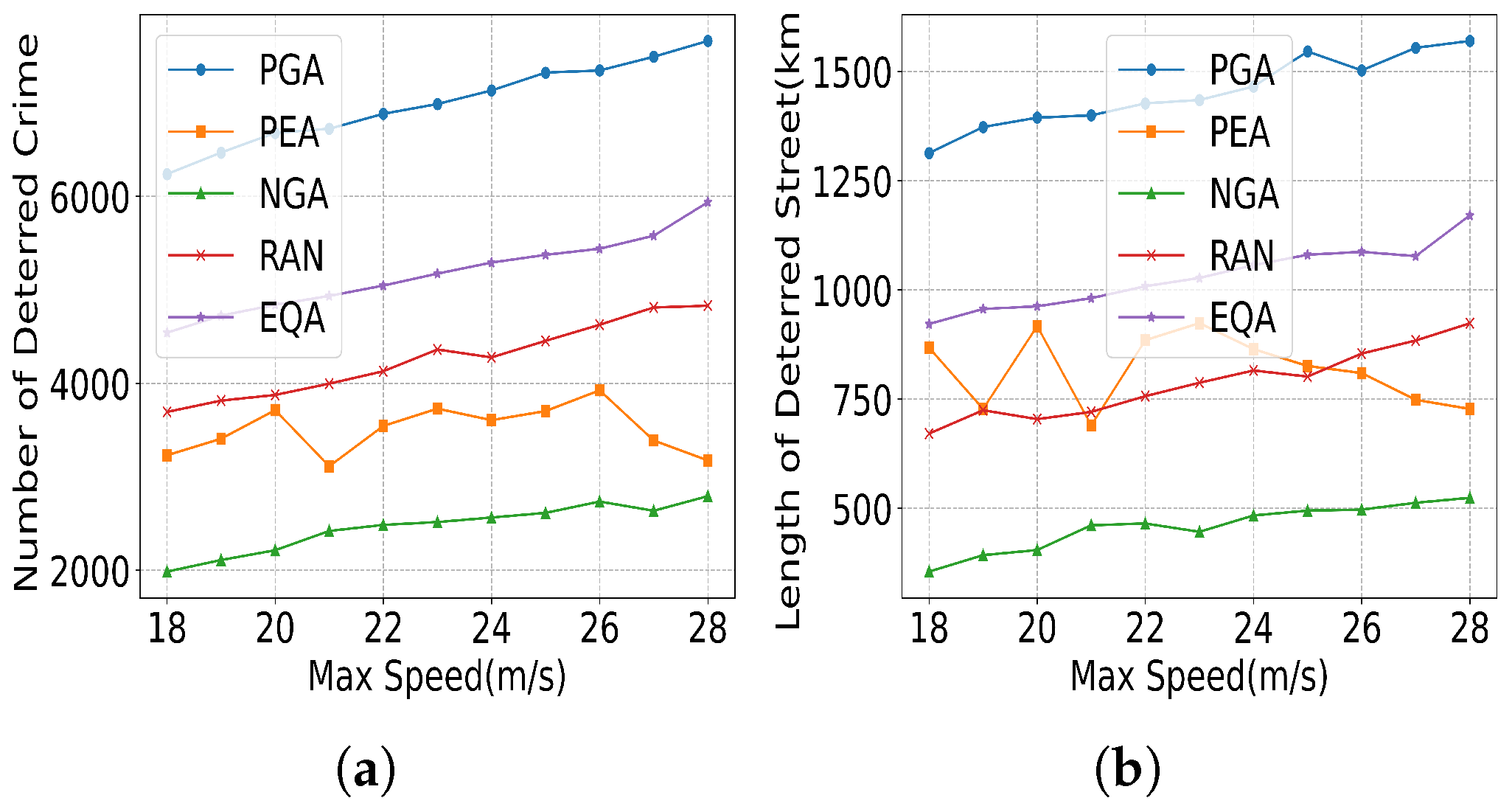
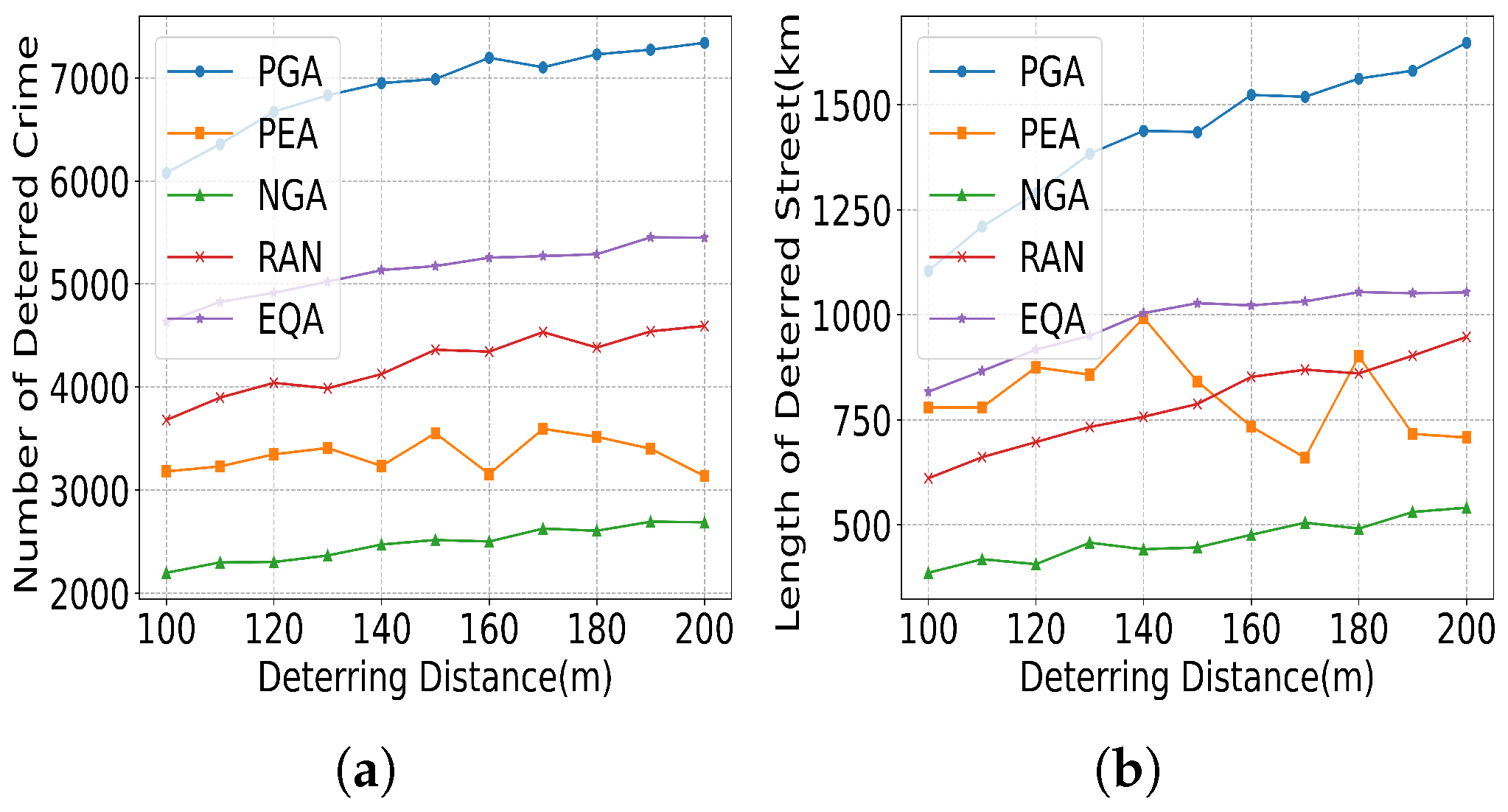
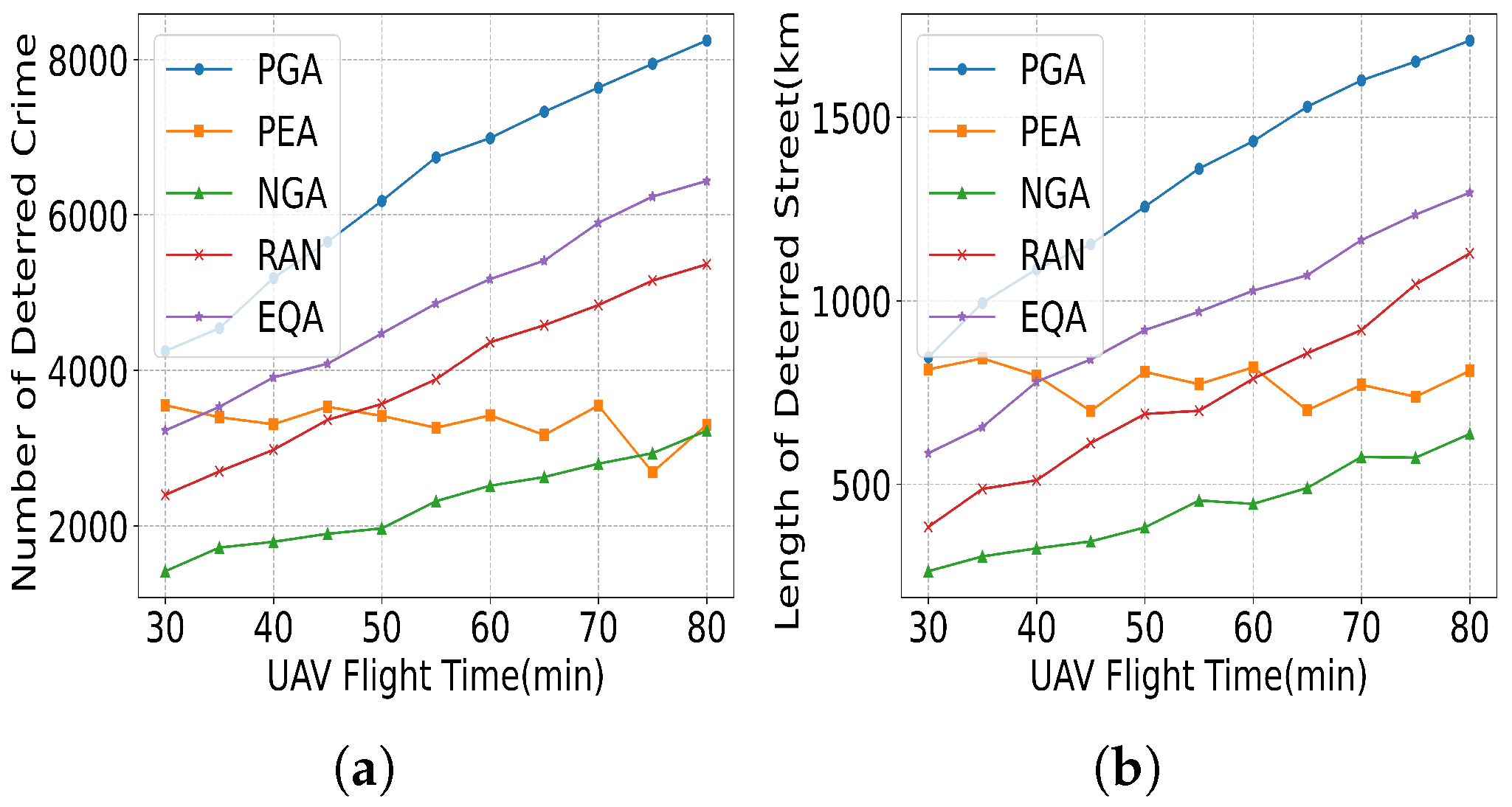
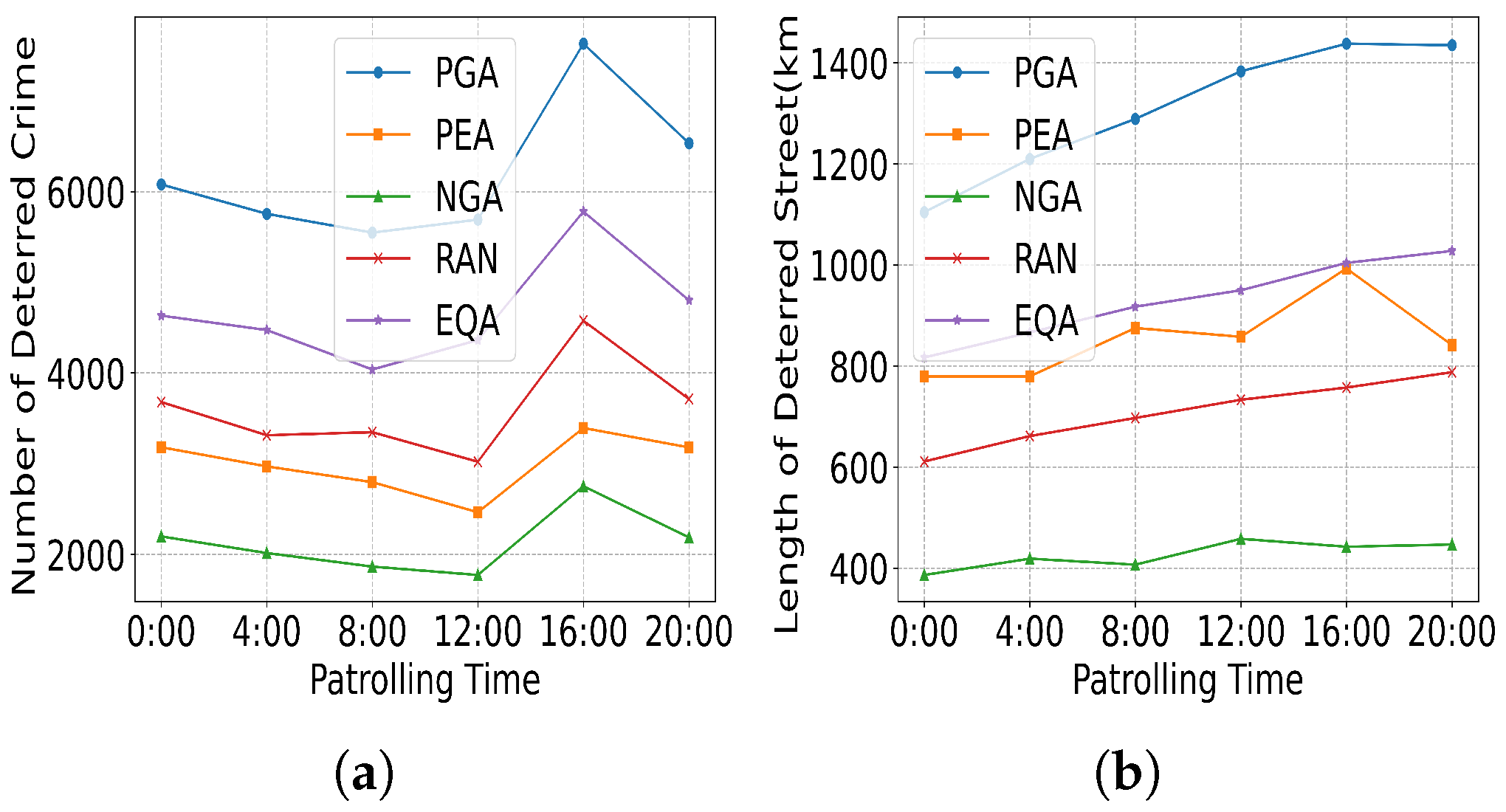
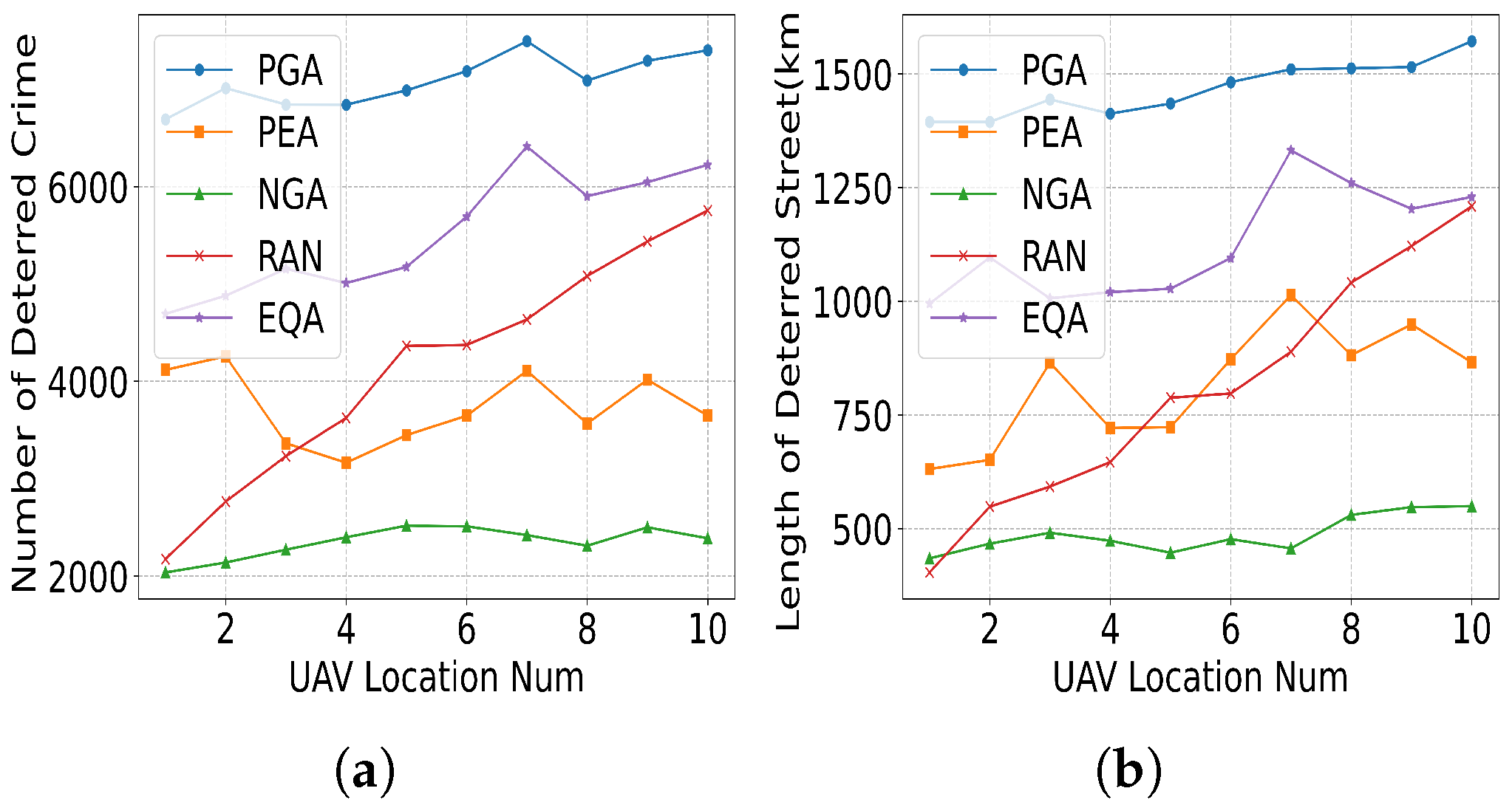
- Prediction-enhanced greedy algorithm (PGA): This method calculates the predictive crime risk and selects the maximum crime risk street for the UAV’s path.
- Prediction-enhanced EL-based algorithm (PEA): Calculate the predictive crime risk and select the predictive crime risk as a fitness function.
- Non-prediction greedy algorithm (NGA): Using historical crime statistics for crime risk and selecting the maximum non-predictive crime risk street for UAV path.
- Random (RAN): Randomly selecting locations of stations within the city area, and assign UAVs to stations with maximum coverage capacity.
- Equal assignment (EQA): Determine station location with maximum coverage capacity, and equally assign UAVs to stations.
6.2. Experimental Results
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Statista. Deaths by Homicide per 100,000 Resident Population in the U.S. from 1950 to 2019. Published by Statista. 2021. Available online: https://www.statista.com/statistics/187592/death-rate-from-homicide-in-the-us-since-1950/ (accessed on 11 May 2021).
- Miller, T.R.; Cohen, M.A.; Swedler, D.I.; Ali, B.; Hendrie, D.V. Incidence and costs of personal and property crimes in the USA, 2017. J. Benefit-Cost Anal. 2021, 12, 24–54. [Google Scholar] [CrossRef]
- Caplan, J.M.; Kennedy, L.W.; Petrossian, G. Police-monitored CCTV cameras in Newark, NJ: A quasi-experimental test of crime deterrence. J. Exp. Criminol. 2011, 7, 255–274. [Google Scholar] [CrossRef]
- Hochstetler, J.; Hochstetler, L.; Fu, S. An optimal police patrol planning strategy for smart city safety. In Proceedings of the 2016 IEEE 18th International Conference on High Performance Computing and Communications; IEEE 14th International Conference on Smart City; IEEE 2nd International Conference on Data Science and Systems (HPCC/SmartCity/DSS), Sydney, NSW, Australia, 12–14 December 2016; pp. 1256–1263. [Google Scholar]
- Weisburd, S. Police presence, rapid response rates, and crime prevention. Rev. Econ. Stat. 2021, 103, 280–293. [Google Scholar] [CrossRef]
- Nagin, D.S.; Solow, R.M.; Lum, C. Deterrence, criminal opportunities, and police. Criminology 2015, 53, 74–100. [Google Scholar] [CrossRef]
- Adams, I.T.; Mourtgos, S.; Nix, J. Turnover in Large US Police Agencies Following the George Floyd Protests. J. Crim. Justice 2023, 88, 102105. [Google Scholar] [CrossRef]
- Voice of Europe Netherlands: Police Staff Shortages Persist, Projected to Continue Until 2027. 2023. Available online: https://www.voiceofeurope.com/netherlands-police-staff-shortages-persist-projected-to-continue-2027/ (accessed on 30 November 2023).
- Statistics Canada. Decrease in the Rate of Police Strength in Canada in 2022. Published by The Daily, Statistics Canada. 2022. Available online: https://www150.statcan.gc.ca/n1/daily-quotidien/230327/dq230327a-eng.htm (accessed on 11 May 2025).
- Ryan-Mosley, T. A New Map of NYC’s Cameras Shows More Surveillance in Black and Brown Neighborhoods. Published by MIT Technology Review. 2022. Available online: https://www.technologyreview.com/2022/02/14/1045333/map-nyc-cameras-surveillance-bias-facial-recognition/ (accessed on 11 May 2025).
- Welsh, B.C.; Farrington, D.P. Public area CCTV and crime prevention: An updated systematic review and meta-analysis. Justice Q. 2009, 26, 716–745. [Google Scholar] [CrossRef]
- Phillips, C. A review of CCTV evaluations: Crime reduction effects and attitudes towards its use. Crime Prev. Stud. 1999, 10, 123–155. [Google Scholar]
- Johnson, K. This New Autonomous Drone for Cops Can Track You in the Dark. Published by Wired. 2023. Available online: https://www.wired.com/story/new-autonomous-drone-for-cops-can-track-you-in-the-dark/ (accessed on 11 May 2025).
- Criminal Legal News. Armed Police Drones Are Coming. Published by Criminal Legal News. 2022. Available online: https://www.criminallegalnews.org/news/2022/feb/15/armed-police-drones-are-coming/ (accessed on 11 May 2023).
- Huang, H.; Savkin, A.V.; Ni, W. Online UAV trajectory planning for covert video surveillance of mobile targets. IEEE Trans. Autom. Sci. Eng. 2021, 19, 735–746. [Google Scholar] [CrossRef]
- Zengin, U.; Dogan, A. Real-time target tracking for autonomous UAVs in adversarial environments: A gradient search algorithm. IEEE Trans. Robot. 2007, 23, 294–307. [Google Scholar] [CrossRef]
- Zheng, Y.J.; Du, Y.C.; Ling, H.F.; Sheng, W.G.; Chen, S.Y. Evolutionary collaborative human-UAV search for escaped criminals. IEEE Trans. Evol. Comput. 2019, 24, 217–231. [Google Scholar] [CrossRef]
- Gao, J.; Wang, Q.; Li, Z.; Zhang, X.; Hu, Y.; Han, Q.; Pan, Y. Towards Efficient Urban Emergency Response Using UAVs Riding Crowdsourced Buses. IEEE Internet Things J. 2024, 11, 22439–22455. [Google Scholar] [CrossRef]
- Zhang, H.; Vorobeychik, Y. Submodular optimization with routing constraints. In Proceedings of the AAAI Conference on Artificial Intelligence, Phoenix, AZ, USA, 12–17 February 2016; Volume 30. [Google Scholar]
- Bian, C.; Feng, C.; Qian, C.; Yu, Y. An efficient evolutionary algorithm for subset selection with general cost constraints. In Proceedings of the AAAI Conference on Artificial Intelligence, New York, NY, USA, 7–12 February 2020; Volume 34, pp. 3267–3274. [Google Scholar]
- Bozcan, I.; Kayacan, E. AU-AIR: A Multi-modal Unmanned Aerial Vehicle Dataset for Low Altitude Traffic Surveillance. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 8504–8510. [Google Scholar] [CrossRef]
- Trotta, A.; Andreagiovanni, F.D.; Di Felice, M.; Natalizio, E.; Chowdhury, K.R. When UAVs ride a bus: Towards energy-efficient city-scale video surveillance. In Proceedings of the IEEE INFOCOM 2018—IEEE Conference on Computer Communications, Honolulu, HI, USA, 16–19 April 2018; pp. 1043–1051. [Google Scholar]
- Li, B.; Fu, C.; Ding, F.; Ye, J.; Lin, F. ADTrack: Target-Aware Dual Filter Learning for Real-Time Anti-Dark UAV Tracking. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xian, China, 30 May–5 June 2021; pp. 496–502. [Google Scholar] [CrossRef]
- Savkin, A.V.; Huang, H. Navigation of a UAV network for optimal surveillance of a group of ground targets moving along a road. IEEE Trans. Intell. Transp. Syst. 2021, 23, 9281–9285. [Google Scholar] [CrossRef]
- Vanegas, F.; Campbell, D.; Eich, M.; Gonzalez, F. UAV based target finding and tracking in GPS-denied and cluttered environments. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Republic of Korea, 9–14 October 2016; pp. 2307–2313. [Google Scholar]
- Pan, Y.; Li, S.; Chen, Q.; Zhang, N.; Cheng, T.; Li, Z.; Guo, B.; Han, Q.; Zhu, T. Efficient schedule of energy-constrained UAV using crowdsourced buses in last-mile parcel delivery. In Proceedings of the ACM on Interactive, Mobile, Wearable and Ubiquitous Technologies; Association for Computing Machinery: New York, NY, USA, 2021; Volume 5, pp. 1–23. [Google Scholar]
- Xiang, C.; Zhou, Y.; Dai, H.; Qu, Y.; He, S.; Chen, C.; Yang, P. Reusing delivery drones for urban crowdsensing. IEEE Trans. Mob. Comput. 2021, 22, 2972–2988. [Google Scholar] [CrossRef]
- Beg, A.; Qureshi, A.R.; Sheltami, T.; Yasar, A. UAV-enabled intelligent traffic policing and emergency response handling system for the smart city. Pers. Ubiquitous Comput. 2021, 25, 33–50. [Google Scholar] [CrossRef]
- Liu, Y.V.; Kang, W.; Maskály, J.; Ivković, S.K. Policing from the Sky: A Case Study of the Police Use of Drones in South Korea. In Exploring Contemporary Police Challenges; Routledge: London, UK, 2022; pp. 167–180. [Google Scholar]
- Nader, E.; Wasileski, G.; Poteyeva, M. Community Perceptions, Concerns for Privacy, and Support for Law Enforcement Use of Aerial Surveillance in Baltimore. Crime Delinq. 2023, 71, 00111287231189720. [Google Scholar] [CrossRef]
- Saulnier, A.; Thompson, S.N. Police UAV use: Institutional realities and public perceptions. Polic. Int. J. Police Strateg. Manag. 2016, 39, 680–693. [Google Scholar] [CrossRef]
- Ratcliffe, J.H.; Taniguchi, T.; Groff, E.R.; Wood, J.D. The Philadelphia foot patrol experiment: A randomized controlled trial of police patrol effectiveness in violent crime hotspots. Criminology 2011, 49, 795–831. [Google Scholar] [CrossRef]
- Koper, C.S. Just enough police presence: Reducing crime and disorderly behavior by optimizing patrol time in crime hot spots. Justice Q. 1995, 12, 649–672. [Google Scholar] [CrossRef]
- Koper, C.S.; Mayo-Wilson, E. Police strategies to reduce illegal possession and carrying of firearms: Effects on gun crime. Campbell Syst. Rev. 2012, 8, 1–53. [Google Scholar] [CrossRef]
- Blanes i Vidal, J.; Kirchmaier, T. The effect of police response time on crime clearance rates. Rev. Econ. Stud. 2018, 85, 855–891. [Google Scholar] [CrossRef]
- Ratcliffe, J.H.; Taniguchi, T.; Taylor, R.B. The crime reduction effects of public CCTV cameras: A multi-method spatial approach. Justice Q. 2009, 26, 746–770. [Google Scholar] [CrossRef]
- Brayne, S.; Christin, A. Technologies of crime prediction: The reception of algorithms in policing and criminal courts. Soc. Probl. 2021, 68, 608–624. [Google Scholar] [CrossRef] [PubMed]
- Wang, H.; Kifer, D.; Graif, C.; Li, Z. Crime rate inference with big data. In Proceedings of the 22nd ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, San Francisco, CA, USA, 13–17 August 2016; pp. 635–644. [Google Scholar]
- Yi, F.; Yu, Z.; Zhuang, F.; Guo, B. Neural Network based Continuous Conditional Random Field for Fine-grained Crime Prediction. In Proceedings of the International Joint Conference on Artificial Intelligence, Macao, China, 10–16 August 2019; pp. 4157–4163. [Google Scholar]
- Huang, C.; Zhang, J.; Zheng, Y.; Chawla, N.V. DeepCrime: Attentive hierarchical recurrent networks for crime prediction. In Proceedings of the 27th ACM international Conference on Information and Knowledge Management, Turin, Italy, 22–26 October 2018; pp. 1423–1432. [Google Scholar]
- Zhao, X.; Tang, J. Modeling Temporal-Spatial Correlations for Crime Prediction. In Proceedings of the 2017 ACM on Conference on Information and Knowledge Management, New York, NY, USA, 6–10 November 2017; CIKM ’17. pp. 497–506. [Google Scholar] [CrossRef]
- Zhao, X.; Fan, W.; Liu, H.; Tang, J. Multi-type urban crime prediction. In Proceedings of the AAAI Conference on Artificial Intelligence, Vancouver, BC, Canada, 28 February–1 March 2022; Volume 36, pp. 4388–4396. [Google Scholar]
- Zhang, X.; Liu, L.; Lan, M.; Song, G.; Xiao, L.; Chen, J. Interpretable machine learning models for crime prediction. Comput. Environ. Urban Syst. 2022, 94, 101789. [Google Scholar] [CrossRef]
- Mooney, P. Denver Crime Data. 2014. Available online: https://www.kaggle.com/datasets/paultimothymooney/denver-crime-data (accessed on 1 October 2024).
- Open Street Map. OpenStreetMap. 2024. Available online: https://www.openstreetmap.org/ (accessed on 14 June 2024).
- Raspisaniye Pogodi Ltd. Weather Forecast and Observational Data for Denver. Published by Raspisaniye Pogodi Ltd. 2025. Available online: https://rp5.ru/%D0%9F%D0%BE%D0%B3%D0%BE%D0%B4%D0%B0_%D0%B2_%D0%94%D0%B5%D0%BD%D0%B2%D0%B5%D1%80%D0%B5 (accessed on 11 May 2025).
- Evans, W.N.; Owens, E.G. COPS and Crime. J. Public Econ. 2007, 91, 181–201. [Google Scholar] [CrossRef]
- Di Tella, R.; Schargrodsky, E. Do police reduce crime? Estimates using the allocation of police forces after a terrorist attack. Am. Econ. Rev. 2004, 94, 115–133. [Google Scholar] [CrossRef]
- Yan, L.; Shen, H.; Zhao, J.; Xu, C.; Luo, F.; Qiu, C.; Zhang, Z.; Mahmud, S. Catcharger: Deploying in-motion wireless chargers in a metropolitan road network via categorization and clustering of vehicle traffic. IEEE Internet Things J. 2021, 9, 9525–9541. [Google Scholar] [CrossRef]
- Corcoran, J.; Zahnow, R. Weather and crime: A systematic review of the empirical literature. Crime Sci. 2022, 11, 16. [Google Scholar] [CrossRef]
- Rizeei, H.M.; Pradhan, B.; Saharkhiz, M.A. Allocation of emergency response centres in response to pluvial flooding-prone demand points using integrated multiple layer perceptron and maximum coverage location problem models. Int. J. Disaster Risk Reduct. 2019, 38, 101205. [Google Scholar] [CrossRef]
- Qian, C.; Shi, J.C.; Yu, Y.; Tang, K. On Subset Selection with General Cost Constraints. In Proceedings of the International Joint Conference on Artificial Intelligence, Melbourne, Australia, 19–25 August 2017; Volume 17, pp. 2613–2619. [Google Scholar]
- Horel, T.; Singer, Y. Maximization of approximately submodular functions. Adv. Neural Inf. Process. Syst. 2016, 29, 3053–3061. [Google Scholar]
- Department, S.P. Seattle Police Department 911 Incident Response. 2024. Available online: https://www.kaggle.com/datasets/sohier/seattle-police-department-911-incident-response (accessed on 2 October 2024).
- Department, L.A.P. Crime in Los Angeles. 2024. Available online: https://www.kaggle.com/datasets/cityofLA/crime-in-los-angeles (accessed on 1 October 2024).






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dataset | Records | Area/km2 | Period |
|---|---|---|---|
| Crime Dataset | 3,837,250 Crimes | 280.7 | January 2016– December 2021 |
| Contextual Weather Dataset | 17,524 Records | 280.7 | January 2016– December 2021 |
| Contextual POI Dataset | 32,607 POIs | 280.7 | N/A |
| Street Map Data | 207,457 Streets | 280.7 | N/A |
| ID | Type | Time | Location | Env. | |
|---|---|---|---|---|---|
| Crime 1 | 2021224206 | burglary | 4/21/2021 17:17:00 | −104.992, 39.733 | Street |
| Crime 2 | 2021225054 | theft | 4/19/2021 10:02:00 | −104.752, 39.653 | In-home |
| Parameter | Description |
|---|---|
| R | DR |
| EDT | |
| Effective deterring Velocity | |
| Maximum Velocity | |
| X | Street Crime Number |
| l() | Street Length |
| T | Maximum Flight Time |
| Sign | Meaning | Default Value |
|---|---|---|
| N | The number of UAVs | 15 |
| T | The flight time limitation of UAVs | 60 min |
| R | The deterring distance of the UAV | 150 m |
| Maximum velocity of UAV | 23 m/s | |
| M | The number of UAV station | 5 |
| t | The patrol time of UAV | 16:00 |
| Metrics | Number of Deterred | Length of Deterred | |
|---|---|---|---|
| Ablation | Crimes | Street (km) | |
| PGA | 6264 | 118 | |
| NGA (Section 4.1) | 2359 | 38 | |
| RAN (Section 5.2) | 4293 | 65 | |
| EQA (Section 5.2) | 5892 | 101 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Z.; Liu, Y.; Hu, S.; Zhang, X.; Pan, Y. Deterring Street Crimes Using Aerial Police: Data-Driven Joint Station Deployment and Patrol Path Planning for Policing UAVs. Drones 2025, 9, 449. https://doi.org/10.3390/drones9060449
Chen Z, Liu Y, Hu S, Zhang X, Pan Y. Deterring Street Crimes Using Aerial Police: Data-Driven Joint Station Deployment and Patrol Path Planning for Policing UAVs. Drones. 2025; 9(6):449. https://doi.org/10.3390/drones9060449
Chicago/Turabian StyleChen, Zuyu, Yan Liu, Shengze Hu, Xin Zhang, and Yan Pan. 2025. "Deterring Street Crimes Using Aerial Police: Data-Driven Joint Station Deployment and Patrol Path Planning for Policing UAVs" Drones 9, no. 6: 449. https://doi.org/10.3390/drones9060449
APA StyleChen, Z., Liu, Y., Hu, S., Zhang, X., & Pan, Y. (2025). Deterring Street Crimes Using Aerial Police: Data-Driven Joint Station Deployment and Patrol Path Planning for Policing UAVs. Drones, 9(6), 449. https://doi.org/10.3390/drones9060449