
UAV-Assisted Localization of Ground Nodes in Urban Environments Using Path Loss Measurements


Abstract
1. Introduction
- We study and analyze the influence of the path loss measurement on ranging error and explore methods to mitigate the impact of this error in localization accuracy.
- We propose a distance estimation error reduction framework to reduce the effects of ranging error on localization accuracy. The framework utilizes the unsupervised learning algorithm to detect the region of the ground node and introduce a multilateration method with waypoint selection.
- We evaluate the performance of the proposed framework using realistic path loss measurements obtained through ray tracing techniques. The localization results demonstrate that the framework effectively bounds estimation errors and reduces overall localization errors compared to conventional unbounded methods. Moreover, both the proposed estimators achieve comparable localization accuracy, highlighting the framework’s ability to address key challenges in ML-based localization.
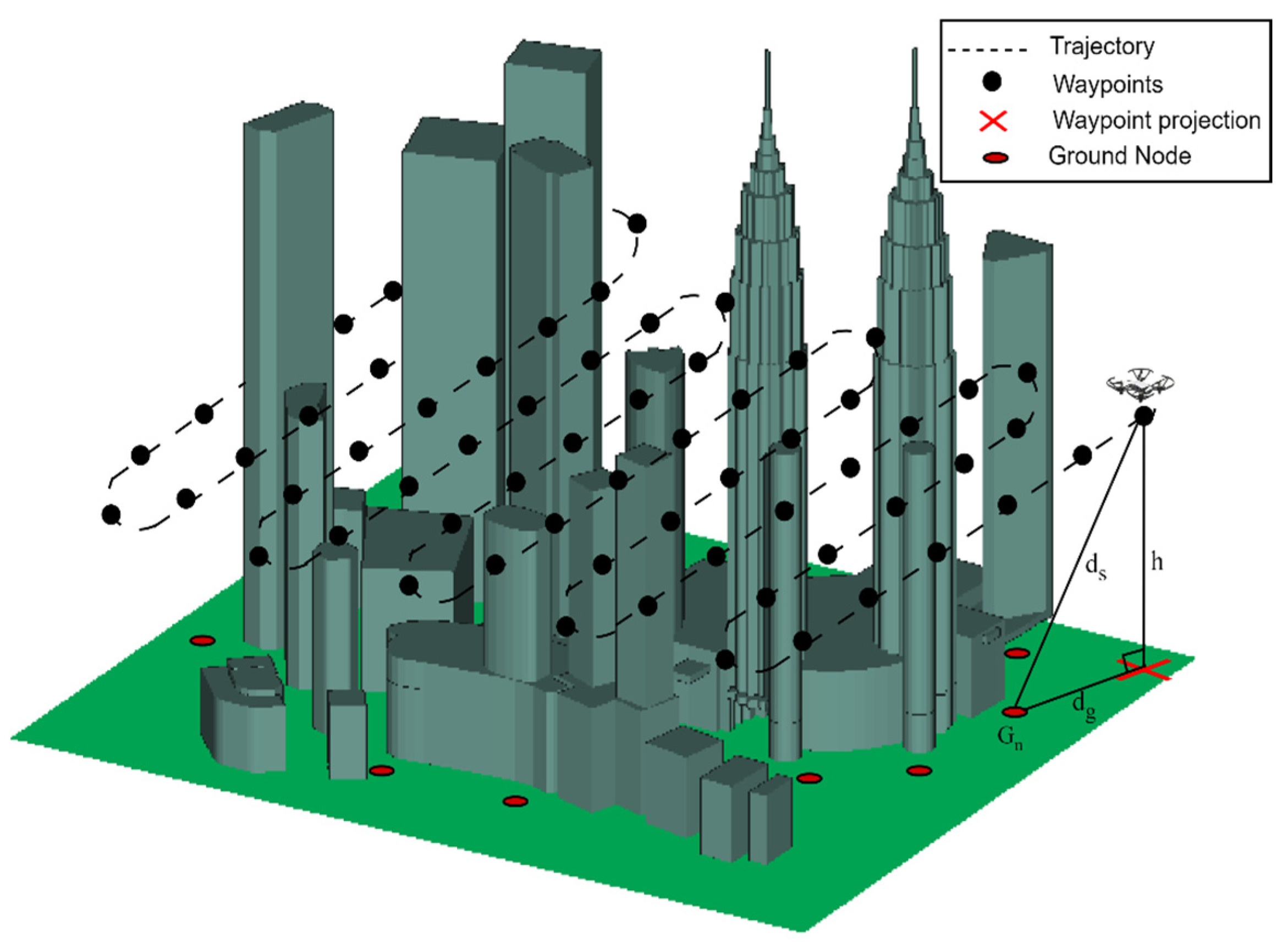
2. System Model
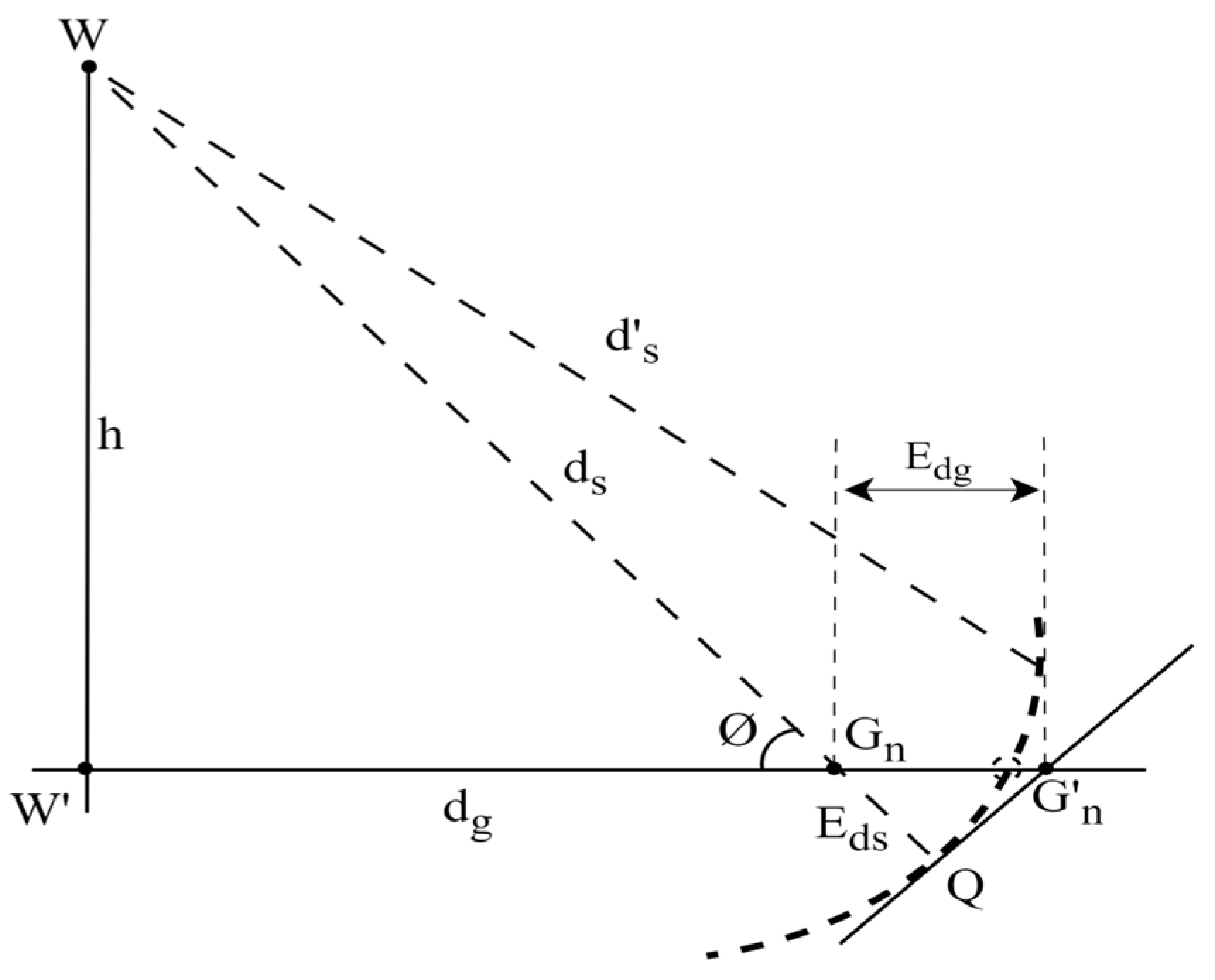
3. Analysis of Path Loss Measurement Error
4. Proposed Framework
4.1. Ground Node Region Detection
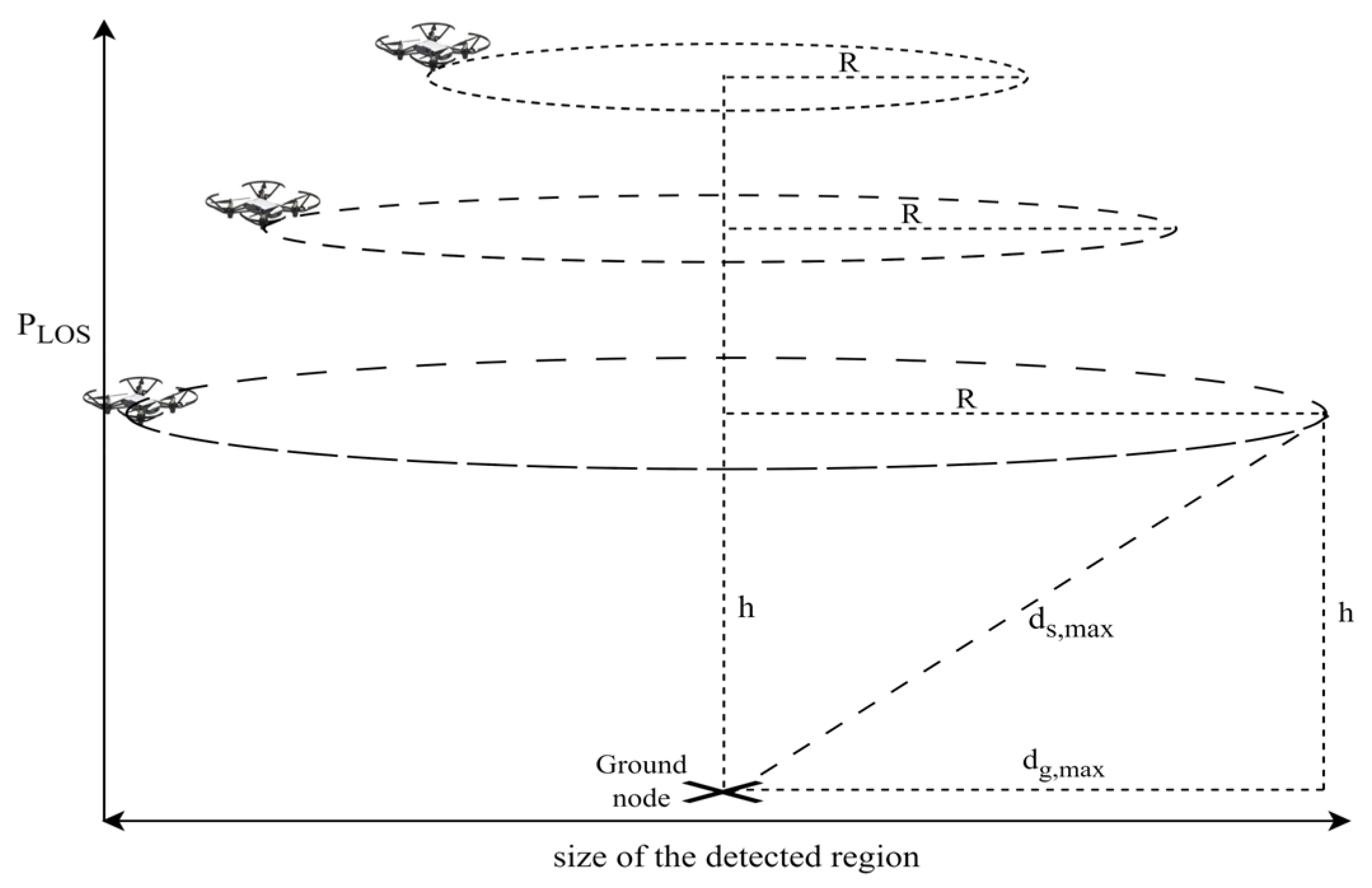
4.2. Waypoint Selection
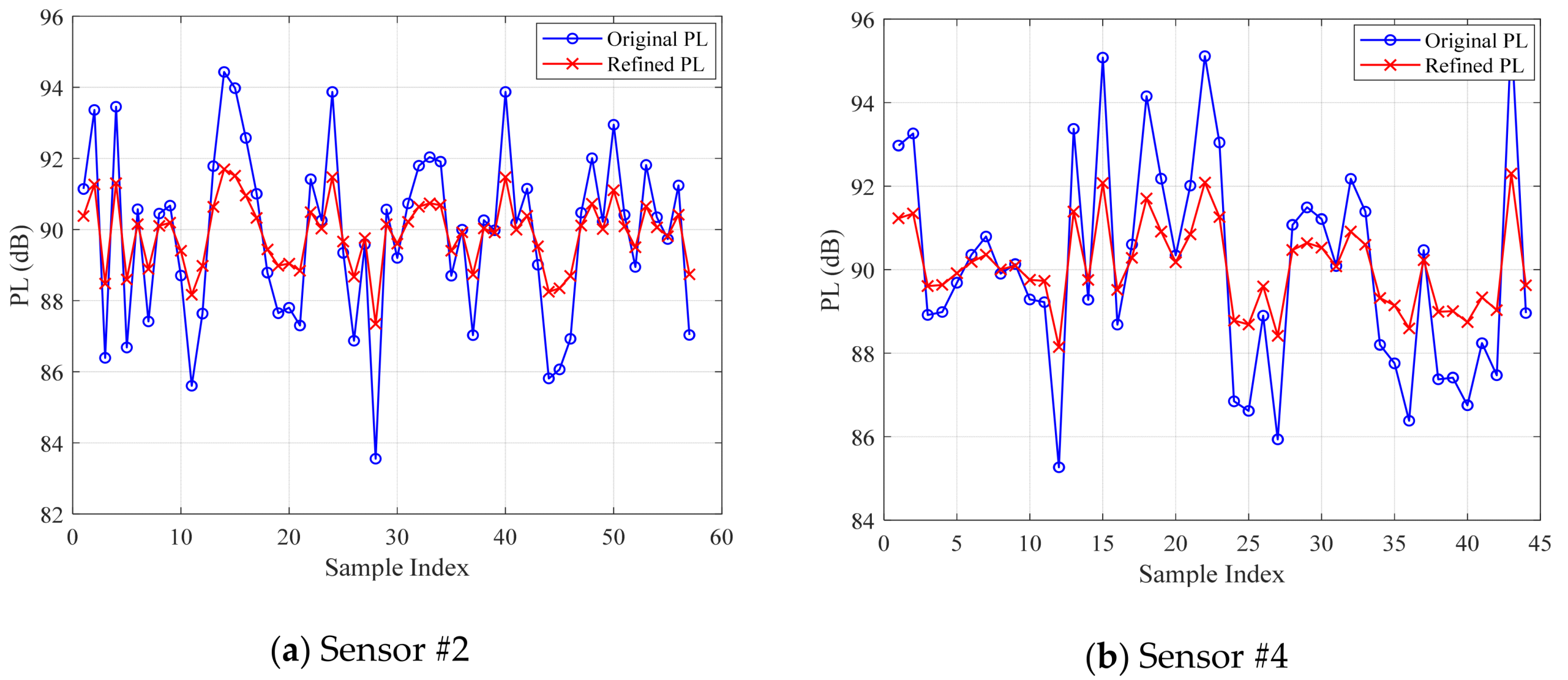
4.3. Refine Path Loss Measurements
4.4. Validation of the Proposed Framework
5. Simulation Environment Configuration
6. Results and Discussion
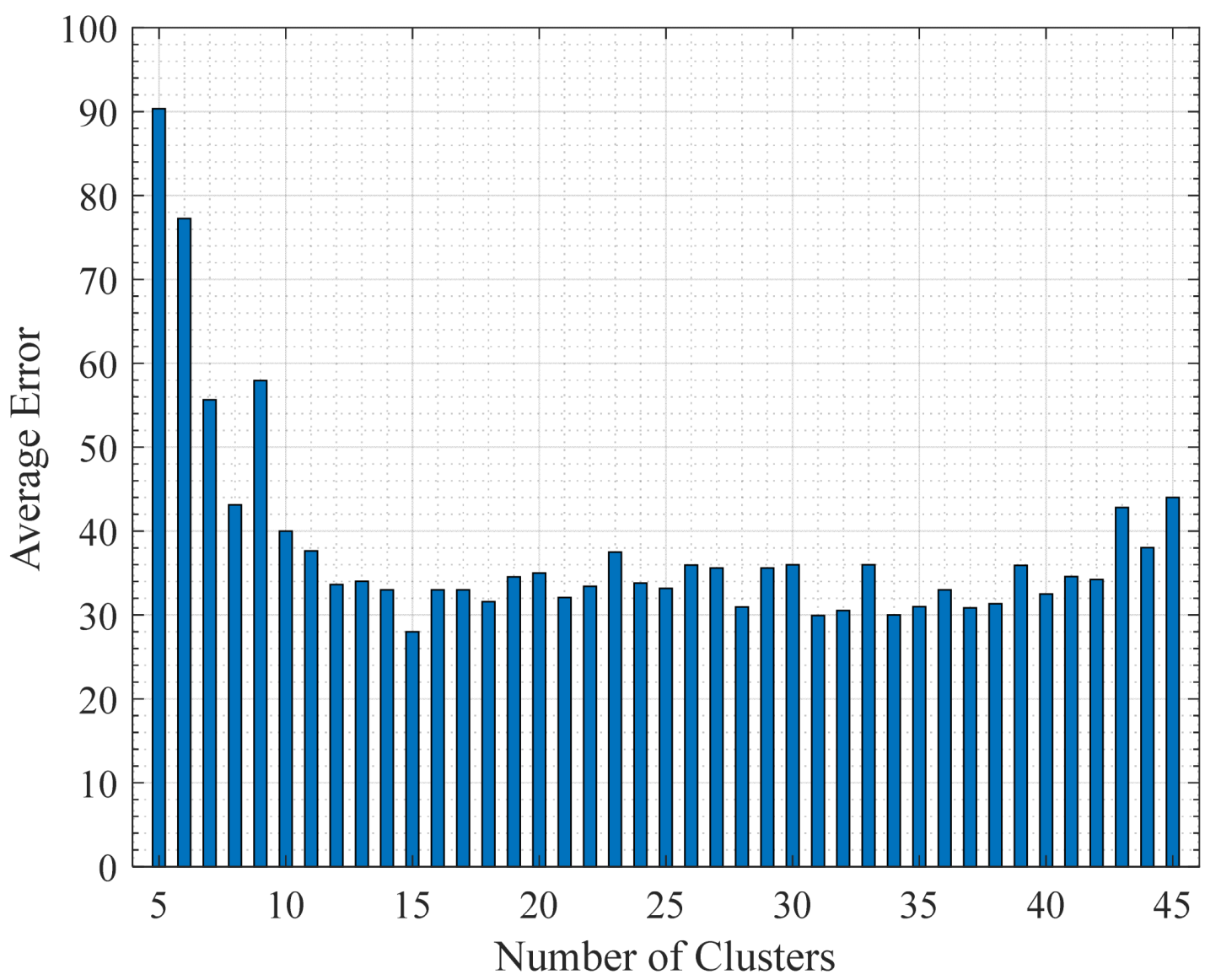
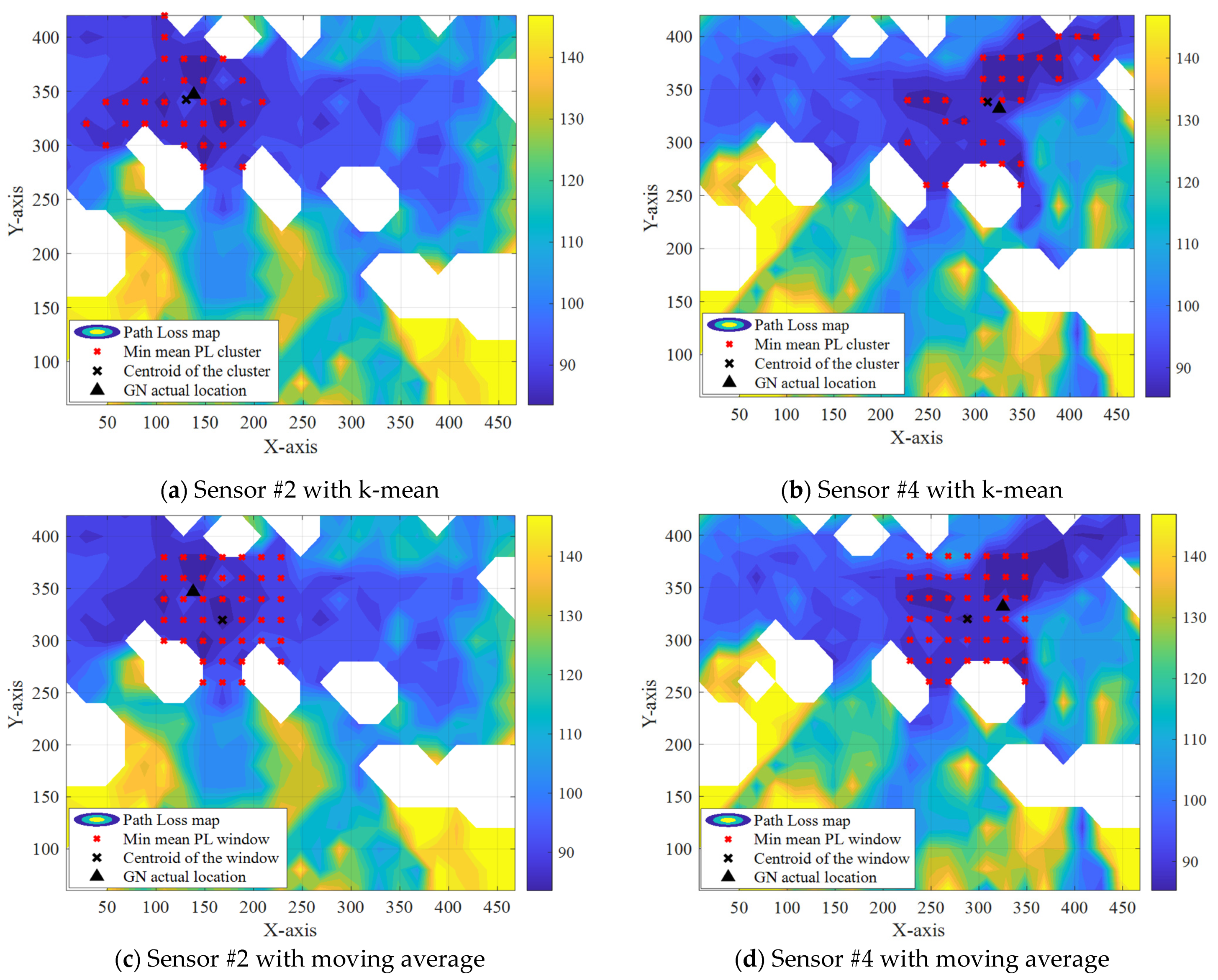
6.1. Detected GN Regions Using K-Means-Based Clustering
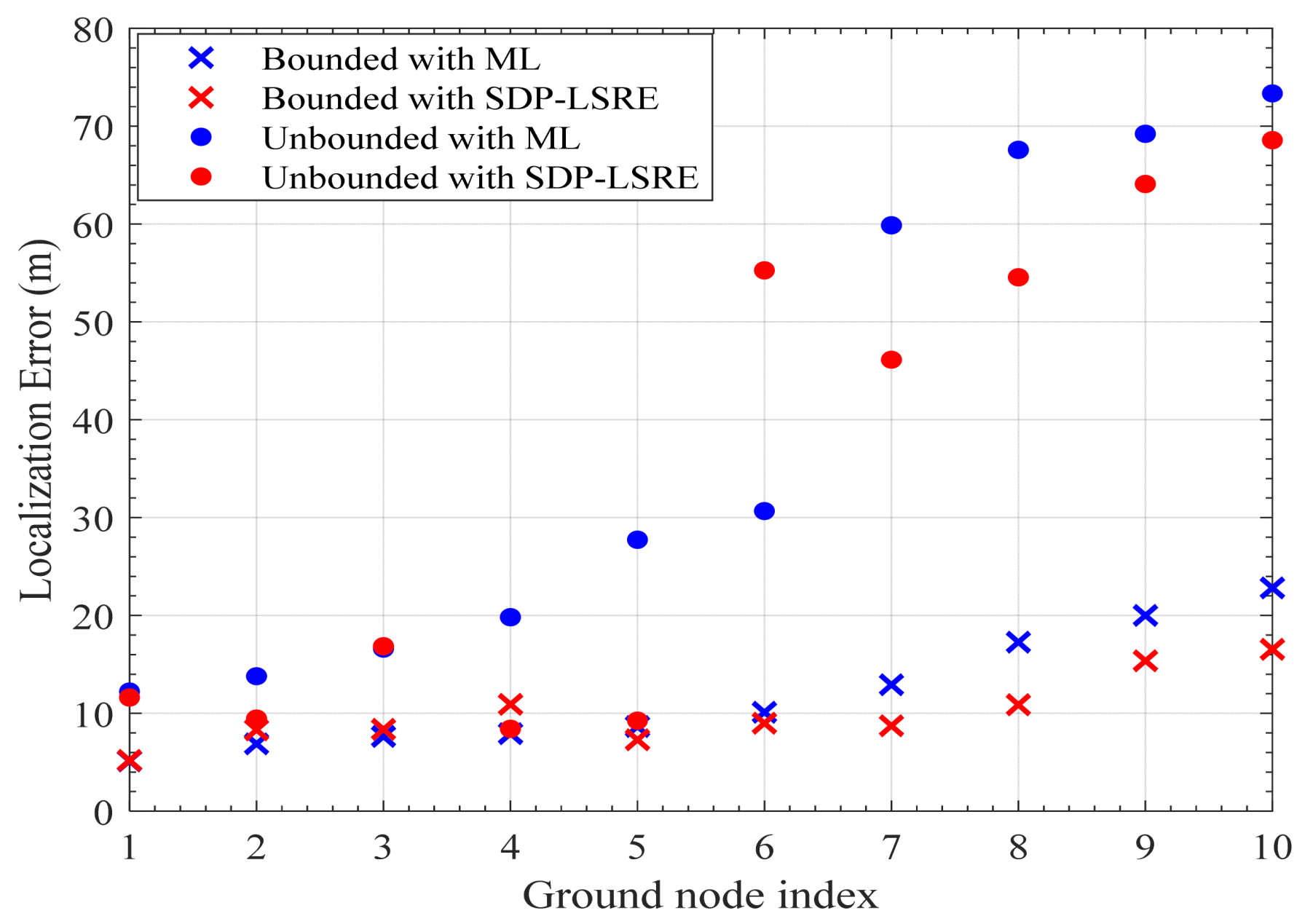
6.2. Localization of Ground Nodes

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Framework Description | Min Error | Max Error | RMSE |
|---|---|---|---|
| Bounded using K-means with ML | 5.1920 | 22.8110 | 13.2586 |
| Bounded using K-means with SDP-LSRE | 5.1470 | 16.5350 | 10.7012 |
| Bounded using moving average with ML | 7.9630 | 50.8910 | 34.8019 |
| Bounded using moving average with SDP-LSRE | 7.0580 | 41.0960 | 29.2911 |
| Unbounded with ML [36] | 13.791 | 73.3540 | 45.8752 |
| Unbounded with SDP-LSRE [36] | 8.4080 | 68.5700 | 41.9959 |
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Soto-Vergel, A.J.; Velez, J.C.; Amaya-Mier, R.; Pardo, M. Transforming Ground Disaster Response: Recent Technological Advances, Challenges, and Future Trends for Rapid and Accurate Real-World Applications of Survivor Detection. Int. J. Disaster Risk Reduct. 2023, 98, 104094. [Google Scholar] [CrossRef]
- Rashid, B.; Rehmani, M.H. Applications of Wireless Sensor Networks for Urban Areas: A survey. J. Netw. Comput. Appl. 2016, 60, 192–219. [Google Scholar] [CrossRef]
- Asaad, S.M.; Maghdid, H.S. A Comprehensive Review of Indoor/Outdoor Localization Solutions in IoT era: Research Challenges and Future Perspectives. Comput. Netw. 2022, 212, 109041. [Google Scholar] [CrossRef]
- Liu, X. Applications of Space-Air-Ground Integrated Monitoring Technology in Resource and Environment Management. In Proceedings of the 2023 2nd International Conference on Artificial Intelligence and Computer Information Technology (AICIT), Yichang, China, 15–17 September 2023; pp. 1–5. [Google Scholar] [CrossRef]
- Bakhuraisa, Y.; Aziz, A.A.; Geok, T.K.; Jamian, S.; Mustakim, F. A Survey of Ranging Techniques for Vehicle Localization in Intelligence Transportation System: Challenges and Opportunities. Int. J. Electr. Comput. Eng. 2022, 12, 6248–6260. [Google Scholar] [CrossRef]
- Luomala, J.; Hakala, I. Adaptive Range-Based Localization Algorithm Based on Trilateration and Reference Node Selection for Outdoor Wireless Sensor Networks. Comput. Netw. 2022, 210, 108865. [Google Scholar] [CrossRef]
- Paul, A.K.; Sato, T. Localization in Wireless Sensor Networks: A survey on Algorithms, Measurement Techniques, Applications and Challenges. J. Sens. Actuator Netw. 2017, 6, 24. [Google Scholar] [CrossRef]
- Pandey, S.; Varma, S. A Range Based Localization System in Multihop Wireless Sensor Networks: A Distributed Cooperative Approach. Wirel. Pers. Commun. 2016, 86, 615–634. [Google Scholar] [CrossRef]
- Coluccia, A.; Fascista, A. On the Hybrid TOA/RSS Range Estimation in Wireless Sensor Networks. IEEE Trans. Wirel. Commun. 2018, 17, 361–371. [Google Scholar] [CrossRef]
- Sallouha, H.; Azari, M.M.; Chiumento, A.; Pollin, S. Aerial Anchors Positioning for Reliable RSS-Based Outdoor Localization in Urban Environments. IEEE Wirel. Commun. Lett. 2018, 7, 376–379. [Google Scholar] [CrossRef]
- Esrafilian, O.; Gangula, R.; Gesbert, D. Three-Dimensional-Map-Based Trajectory Design in UAV-Aided Wireless Localization Systems. IEEE Intern. Things J. 2021, 8, 9894–9904. [Google Scholar] [CrossRef]
- Liu, T.; Zhao, H.; Yang, H.; Zheng, K.; Chatzimisios, P. Design and Implementation of A novel Real-time Unmanned Aerial Vehicle Localization Scheme Based on Received Signal Strength. Trans. Emerg. Telecom. Technol. 2021, 32, e4350. [Google Scholar] [CrossRef]
- He, C.; Dong, Y.; Wang, Z.J. Radio Map Assisted Multi-UAV Target Searching. IEEE Trans. Wirel. Commun. 2023, 22, 4698–4711. [Google Scholar] [CrossRef]
- Zanella, A. Best Practice in RSS Measurements and Ranging. IEEE Commun. Surv. Tutor. 2016, 18, 2662–2686. [Google Scholar] [CrossRef]
- Ebrahimi, D.; Sharafeddine, S.; Ho, P.H.; Assi, C. Autonomous UAV Trajectory for Localizing Ground Objects: A Reinforcement Learning Approach. IEEE Trans. Mob. Comput. 2021, 20, 1312–1324. [Google Scholar] [CrossRef]
- Atif, M.; Ahmad, R.; Ahmad, W.; Zhao, L.; Rodrigues, J.J.P.C. UAV-Assisted Wireless Localization for Search and Rescue. IEEE Syst. J. 2021, 15, 3261–3272. [Google Scholar] [CrossRef]
- Liu, B.; Zhu, X.; Jiang, Y.; Wei, Z.; Huang, Y. UAV and Piecewise Convex Approximation Assisted Localization with Unknown Path Loss Exponents. IEEE Trans. Veh. Technol. 2019, 68, 12396–12400. [Google Scholar] [CrossRef]
- Buyukcorak, S.; Kurt, G.K.; Yongacoglu, A. UAV Assisted Ground User Localization. In Proceedings of the 2019 IEEE International Conference on Wireless for Space and Extreme Environments (WiSEE), Ottawa, ON, Canada, 16–18 October 2019; pp. 111–115. [Google Scholar] [CrossRef]
- Kumar, V.; Arablouei, R.; Jurdak, R.; Kusy, B.; Bergmann, N.W. RSSI-Based Self-Localization with Perturbed Anchor Positions. In Proceedings of the 2017 IEEE 28th Annual International Symposium on Personal, Indoor, and Mobile Radio Communications (PIMRC), Montreal, QC, Canada, 8–13 October 2017; Volume 2017, pp. 1–6. [Google Scholar] [CrossRef]
- Yuan, B.; He, R.; Ai, B.; Chen, R.; Wang, G.; Ding, J. A UAV-Assisted Search and Localization Strategy in Non-Line-of-Sight Scenarios. IEEE Intern. Things J. 2022, 9, 23841–23851. [Google Scholar] [CrossRef]
- Zeytinci, M.B.; Sari, V.; Harmanci, F.K.; Anarim, E.; Akar, M. Location Estimation Using RSS Measurements with Unknown Path Loss Exponents. Eurasip J. Wirel. Commun. Netw. 2013, 2013, 178. [Google Scholar] [CrossRef]
- Vaghefi, R.M.; Schloemann, J.; Buehrer, R.M. NLOS Mitigation in TOA-based Localization Using Semidefinite Programming. In Proceedings of the 2013 10th Workshop on Positioning, Navigation and Communication (WPNC), Dresden, Germany, 20–21 March 2013; pp. 1–6. [Google Scholar] [CrossRef]
- Wan, P.; Wen, Y.; Hu, S.; Duan, C.; Zhang, Z. Source Localization Based on UAV Swarm Trajectory Optimization with Incomplete Measurements. In Proceedings of the 2024 IEEE/CIC International Conference on Communications in China (ICCC Workshops), Hangzhou, China, 7–9 August 2024; pp. 735–740. [Google Scholar] [CrossRef]
- Cheng, L.; Wu, C.-D.; Zhang, Y.-Z.; Wang, Y. An indoor localization strategy for a mini-UAV in the presence of obstacles. Int. J. Adv. Robot. Syst. 2012, 9, 153. [Google Scholar] [CrossRef]
- Esrafilian, O.; Gangula, R.; Gesbert, D. UAV-aided Wireless Node Localization Using Hybrid Radio Channel Models. In Proceedings of the 2022 IEEE International Conference on Communications Workshops, Seoul, Republic of Korea, 16–20 May 2022; pp. 1083–1088. [Google Scholar] [CrossRef]
- Zhang, Y.; Li, J.; Gulliver, T.A.; Wu, H.; Xie, G.; Mei, X.; Xian, J.; Wang, W.; Liang, L. Metaheuristic Optimization for Robust RSSD-Based UAV Localization with Position Uncertainty. Drones 2025, 9, 147. [Google Scholar] [CrossRef]
- Sorbelli, F.B.; Pinotti, C.M.; Silvestri, S.; Das, S.K. Measurement Errors in Range-Based Localization Algorithms for UAVs: Analysis and Experimentation. IEEE Trans. Mob. Comput. 2022, 21, 1291–1304. [Google Scholar] [CrossRef]
- Koutsonikolas, D.; Das, S.M.; Hu, Y.C. Path Planning of Mobile Landmarks for Localization in Wireless Sensor Networks. Comput. Commun. 2007, 30, 2577–2592. [Google Scholar] [CrossRef]
- Song, M.; Liang, Z.; Huo, Y.; Liu, R. Line-of-Sight Probability for UAV Communications in 3D Grid Urban Streets. Electron. Lett. 2023, 59, e12979. [Google Scholar] [CrossRef]
- Yan, C.; Fu, L. A Comprehensive Survey on UAV Communication Channel Modeling. IEEE Accesss 2019, 7, 107769–107792. [Google Scholar] [CrossRef]
- Matolak, D.W.; Member, S.; Sun, R. Air–Ground Channel Characterization for Unmanned Aircraft Systems—Part III: The Suburban and Near-Urban Environments. IEEE Trans. Veh. Technol. 2017, 66, 6607–6618. [Google Scholar] [CrossRef]
- Ezugwu, A.E.; Ikotun, A.M.; Oyelade, O.O.; Abualigah, L.; Agushaka, J.O.; Eke, C.I.; Akinyelu, A.A. A comprehensive Survey of Clustering Algorithms: State-of-the-Art Machine Learning Applications, Taxonomy, Challenges, and Future Research Prospects. Eng. Appl. Artif. Intell. 2022, 110, 104743. [Google Scholar] [CrossRef]
- Czink, N.; Cera, P.; Salo, J.; Bonek, E.; Nuutinen, J.P.; Ylitalo, J. A framework for Automatic Clustering of Parametric MIMO Channel Data Including Path Powers. In Proceedings of the IEEE Vehicular Technology Conference, Montreal, QC, Canada, 25–28 September 2006; pp. 1–5. [Google Scholar] [CrossRef]
- Soleymani, F.; Zhu, S.; Hu, X. An Unsupervised k-means Machine Learning Algorithm Via Overlapping to Improve the Nodes Selection for Solving Elliptic Problems. Eng. Anal. Bound. Elem. 2024, 168, 105919. [Google Scholar] [CrossRef]
- Andrasto, T.; Ristanto, R.D.; Sukamta, S.; Aufa, A.; Hafidz, C.M.; Sandyawan, B.; Alfarisi, A.F. Method EWMA (exponentially weighted moving average) as a filter to fine and remove noise on time series data. IOP Conf. Ser. Earth Environ. Sci. 2023, 1203, 012012. [Google Scholar] [CrossRef]
- Wang, Z.; Zhang, H.; Member, S.; Lu, T.; Gulliver, T.A.; Member, S. Cooperative RSS-Based Localization in Wireless Sensor Networks Using Relative Error Estimation and Semidefinite Programming. IEEE Trans. Veh. Technol. 2019, 68, 483–497. [Google Scholar] [CrossRef]
- DecaWave. Ultra-Wideband (UWB) Transceiver Evaluation Kit. DecaWave Ltd. 2021. Available online: https://www.qorvo.com/products/p/EVK1000 (accessed on 16 January 2025).




| Parameter | Details |
|---|---|
| UAV and GN Antenna | Isotropic with gain 0 dB |
| Carrier Frequency | 5.9 GHz |
| Bandwidth | 500 MHz |
| Transmitted power | 0 dBm |
| Raytracing | SBR |
| Propagation model | X3D |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bakhuraisa, Y.; Lim, H.S.; Chan, Y.K.; Hilman, M. UAV-Assisted Localization of Ground Nodes in Urban Environments Using Path Loss Measurements. Drones 2025, 9, 450. https://doi.org/10.3390/drones9060450
Bakhuraisa Y, Lim HS, Chan YK, Hilman M. UAV-Assisted Localization of Ground Nodes in Urban Environments Using Path Loss Measurements. Drones. 2025; 9(6):450. https://doi.org/10.3390/drones9060450
Chicago/Turabian StyleBakhuraisa, Yaser, Heng Siong Lim, Yee Kit Chan, and Muhammad Hilman. 2025. "UAV-Assisted Localization of Ground Nodes in Urban Environments Using Path Loss Measurements" Drones 9, no. 6: 450. https://doi.org/10.3390/drones9060450
APA StyleBakhuraisa, Y., Lim, H. S., Chan, Y. K., & Hilman, M. (2025). UAV-Assisted Localization of Ground Nodes in Urban Environments Using Path Loss Measurements. Drones, 9(6), 450. https://doi.org/10.3390/drones9060450