1. Introduction
Urban Air Mobility (UAM) is a networked system that enables the operation of aerial vehicles, such as drones, air taxis, and autonomous aircraft, to provide safe and efficient transportation within urban environments. With growing populations and increasing congestion in major cities, traditional ground transportation infrastructure often struggles to keep pace with rising mobility demands. Electric Vertical Take-Off and Landing (eVTOL), a key component of UAM, offers a promising solution by utilizing urban airspace to reduce traffic congestion and deliver environmentally friendly transportation alternatives [
1,
2].
eVTOL aircraft, typically operating at altitudes below 1000 m, are increasingly utilized for applications beyond passenger transport, including emergency medical services, cargo delivery, and surveillance [
3]. Regulatory bodies such as the European Union Aviation Safety Agency (EASA) anticipate that these vehicles will operate primarily within the 150–300 m altitude range [
4], where line-of-sight communication with ground infrastructure remains highly reliable. This environment supports real-time video streaming with low latency and sufficient resolution [
5,
6], enabling a wide range of ground-oriented multimedia services. Such capabilities are particularly beneficial for urban missions involving passenger infotainment, medical support, and regional monitoring. For instance, medical eVTOLs can serve as airborne communication hubs, allowing onboard personnel to livestream medical procedures to remote specialists. This facilitates real-time expert consultation and critical decision making during transit, thereby significantly enhancing patient care while in flight.
In the context of infotainment, eVTOL passengers are expected to engage in a variety of in-flight activities, such as checking emails, participating in remote meetings, streaming high-resolution live content (e.g., sports events), and using on-demand video platforms like TikTok and YouTube. These applications demand stable, real-time video streaming. Similarly, urban monitoring tasks depend on multi-angle, real-time video feeds to support situational awareness and facilitate rapid response. For passenger entertainment, high-quality content delivery is essential—for instance, 360-degree video [
7] offers an immersive, panoramic experience with interactive features, enriching the overall in-flight experience.
Recognizing this potential, many countries are actively exploring how eVTOL technology can help alleviate growing urban transportation challenges. Recent studies highlight increasing interest in the technical and operational dimensions of UAM, particularly the integration of communication, navigation, and control systems. These advancements aim to address critical challenges, such as traffic management, connectivity, aerial infotainment and emergency video delivery, and airspace coordination, in densely populated areas.
However, the growing demand for high-quality video streaming, immersive entertainment, and real-time interactive applications has significantly increased bandwidth requirements. For example, the panoramic nature of 360-degree videos imposes high data transmission demands on UAM networks. Additionally, due to the close viewing distance—often just a few centimeters between the viewer’s eyes and the display—higher spatial resolution is essential to ensure a satisfactory visual experience [
8]. Consequently, the proliferation of eVTOLs and video-based applications and services is expected to generate massive amounts of data and network traffic. Future UAM networks must accommodate the need for rapid-response, delay-sensitive, and bandwidth-intensive multimedia transmission, especially in densely populated urban areas.
Cellular networks currently serve as the primary infrastructure for wireless connectivity, largely due to the extensive deployment of terrestrial base stations [
9]. However, conventional ground-based cellular systems are not well suited for aerial platforms operating in three-dimensional airspace. Specifically, the downward-facing antennas and earth-bound propagation models of these networks often lead to unreliable coverage and unstable links at higher altitudes [
10]. To overcome these challenges, future 6G networks are being designed with several key enhancements, including dynamic beamforming, support for aerial user equipment, and integration with non-terrestrial networks such as satellites and HAPS, thereby offering complementary connectivity for low-altitude UAM applications [
11].
In parallel with these mobile network advancements, a range of high-capacity wireless communication technologies is being explored to satisfy the demanding requirements of UAM. Millimeter-wave (mmWave) communication [
12], operating between 30 and 300 GHz, offers high data throughput over short distances, making it suitable for localized UAM links. However, it is highly susceptible to blockage and atmospheric absorption. Terahertz (THz) communication (>0.1 THz) extends this concept by providing even greater bandwidth and potential data rates [
13], though it faces considerable challenges, including severe propagation loss, hardware complexity, and sensitivity to environmental factors [
14].
Free-space optical (FSO) communication is also emerging as a viable solution for aerial connectivity. Utilizing highly directional laser beams, FSO enables secure, high-bandwidth links that are inherently resistant to radio frequency interference. Its advantages include abundant unlicensed spectrum, energy efficiency, and low electromagnetic interference [
15]. Nevertheless, FSO performance is contingent on maintaining line of sight and is particularly vulnerable to adverse weather conditions such as fog, snow, and atmospheric turbulence, though it is less affected by rain compared to traditional RF systems [
16]. To address these limitations, hybrid FSO/RF systems are under development, employing adaptive switching mechanisms to maintain link robustness in varying atmospheric conditions.
Together, advanced mobile networks, mmWave, THz, and FSO technologies are expected to form a heterogeneous and resilient communication infrastructure tailored for UAM. By leveraging the complementary strengths of these approaches, future wireless systems can enable the high reliability, low latency, and massive connectivity required for safe and efficient UAM operations, particularly in beyond-line-of-sight and dense urban environments [
14].
One limitation of the mmWave and THz frequency bands is their high path loss, resulting in relatively shorter transmission distances [
17]. To address the limitations of ground-based base stations in providing reliable coverage in three-dimensional spaces, High-Altitude Platform Systems (HAPSs) have emerged as a promising communication infrastructure and key research focus. Advances in solar panel efficiency, lightweight composite materials, autonomous avionics, and antenna technologies have significantly improved the feasibility of HAPS as aerial network nodes [
18]. HAPSs are typically deployed in the stratosphere at an altitude of around 20 km, offering several advantages, including wide coverage areas, line-of-sight links, and a fixed position relative to the Earth. Moreover, they have shorter communication delays compared to low-Earth-orbit (LEO) satellites [
19,
20], making them better suited for supporting multimedia transmission services for eVTOL aircraft passengers.
While advanced communication technologies facilitate video transmission in UAM systems, the encoding process fundamentally governs transmission efficiency for eVTOL passenger applications. Scalable High-Efficiency Video Coding (SHVC) [
21,
22] encodes video into a multi-layer structure spanning temporal, spatial, and quality dimensions. The base layer provides a basic reconstruction of tiles at the lowest usable quality, while enhancement layers include additional information to incrementally improve the quality of the tiles. To reconstruct a tile at a specific quality level, all preceding enhancement layers, including the base layer, must be decoded. This layered structure allows clients to adaptively select and decode varying numbers of layers based on network conditions and device capabilities, effectively addressing the instability of IP networks and the diversity of devices.
In summary, achieving efficient multimedia transmission in UAM scenarios requires overcoming the limitations of conventional communication technologies by designing a multi-layered communication architecture that adapts to the dynamic characteristics of three-dimensional spaces. Effective transmission strategies must be integrated to optimize performance. However, ground cellular infrastructures, originally designed for terrestrial users, face significant limitations in providing reliable aerial coverage. During network congestion periods such as morning and evening rush hours, high-priority demands may be preempted by lower-priority traffic, exacerbating resource contention.
To address these challenges, this study proposes a novel video streaming architecture that integrates HAPS, eVTOLs, and 6G communication technologies to enhance spatial coverage and resource availability in aerial networks. The research specifically focuses on bandwidth allocation strategies for video streaming services in unmanned eVTOL systems, with the goal of ensuring service continuity and efficient resource utilization under dynamic network load conditions. This work directly tackles these challenges through the following key innovations:
We propose a network architecture tailored for video streaming services in unmanned eVTOL aircraft, integrating advanced communication technologies such as mmWave, THz, and FSO. High-Altitude Platform Stations (HAPSs) are incorporated to overcome the coverage limitations of ground base stations, thereby enhancing link reliability and service availability.
We design a priority-aware bandwidth allocation strategy that differentiates between critical and non-critical video applications. A cooperative offloading mechanism is introduced, whereby HAPSs and neighboring unmanned eVTOLs assist in relaying video traffic from underutilized ground base stations to improve bandwidth availability in congested regions. Simulations show that this method achieves 100% satisfaction for emergency video tasks and maintains over 60% satisfaction for real-time applications under peak load.
We develop an aerial relay and multicast scheduling mechanism based on a service-provider-coordinated multicast tree structure. This scheme significantly improves bandwidth utilization—by 45% compared to the state-of-the-art I-SAC algorithm [
23]—by leveraging underutilized eVTOLs and HAPSs to support overloaded links.
To enhance video playback quality for non-critical applications, we propose a buffer-aware preloading strategy that caches upcoming video segments as aircraft pass over base stations with available capacity. This approach reduces playback interruptions in bandwidth-constrained areas and improves overall service continuity.
Following this introduction,
Section 2 reviews the existing literature related to communication technologies and video streaming in dynamic aerial scenarios.
Section 3 details the novel network architecture and adaptive streaming algorithm developed for unmanned eVTOL in-flight video delivery.
Section 4 presents the simulation results and their analysis. Finally,
Section 5 concludes this study and summarizes key findings.
2. Related Work
Existing research, predominantly centered on Unmanned Aerial Vehicle (UAV) networks, offers foundational insights applicable to UAM, as both domains operate within highly dynamic, three-dimensional environments. For instance, Shon and Lee [
24] proposed an optimized decision-support framework for strategic and operational planning in UAM systems. Their model integrates high-level system design, including optimal eVTOL fleet sizing, vertiport infrastructure allocation, and charger deployment, with low-level operational control of individual eVTOL units, managing transitions between service, charging, idling, and repositioning states.
Similarly, Sun et al. [
25] introduced a hierarchical architecture that combines terrestrial and aerial computing resources, leveraging UAV mobility to enhance performance. Their joint optimization framework manages resource allocation, computation offloading, and flight trajectory control to maximize overall system utility. Li et al. [
26] advanced this approach by incorporating Integrated Sensing and Communication (ISAC) into UAV networks, enabling multiple UAVs to perform radar-based ground user detection while simultaneously supporting communication services.
THz communication technologies have also been explored for their applicability in UAM environments. Liang et al. [
27] addressed co-channel interference in UAV-based THz communication systems by formulating a multidimensional resource optimization problem and solving it through a sequential iteration algorithm. Saber et al. [
28] developed an analytical model for directional THz links, using the Meijer G-function to derive closed-form expressions for the channel gain’s probability density and cumulative distribution functions. Mustari et al. [
29] evaluated a cooperative MAC protocol for THz-based flying ad hoc networks, demonstrating superior performance over direct communication methods. Tun et al. [
30] extended this by proposing a joint optimization framework for THz-assisted mobile edge computing, improving both computation offloading and communication efficiency.
Hybrid transmission schemes that integrate RF and FSO links have also received attention. In [
31], fog-induced signal attenuation was empirically modeled using real-time visibility data to assess its impact on FSO/RF link performance. The study involved monitoring operational FSO and RF links at 1 GHz, 10 GHz, and 25 GHz under varying atmospheric conditions. Xu et al. [
32] proposed an adaptive combining scheme for cooperative FSO/RF communications within Space–Air–Ground Integrated Networks (SAGINs). Their approach dynamically selects the communication mode based on the real-time signal-to-noise ratio (SNR) of the FSO relay. If the SNR surpasses a threshold, only the FSO link operates with an amplify-and-forward protocol; otherwise, both FSO and RF links are used and combined at the receiver via maximal ratio combining to improve reliability. Likewise, Mashiko et al. [
33] examined a hybrid FSO/RF SAGIN architecture, where high-capacity but weather-sensitive FSO links are backed by more stable, lower-capacity RF links across satellite–HAPS–ground segments. Their joint control strategy optimized HAPS deployment and coverage using a solution space reduction technique to efficiently determine optimal parameters.
In terms of video transmission, several studies have focused on optimizing streaming performance in UAV networks. Ghazikor et al. [
34] developed a decentralized control strategy for video streaming in unlicensed bands, balancing packet loss against video quality. Zhan et al. [
35] highlighted how 6G technologies can support adaptive aerial video streaming by responding to environmental and channel variations. Yaqoob et al. [
23] introduced an enhanced off-policy soft actor–critic (I-SAC) reinforcement learning algorithm, which optimizes Quality of Experience by jointly considering video playback conditions, UAV flight dynamics, and historical network data.
Despite ongoing advancements, current studies predominantly focus on UAV-based monitoring and fall short of addressing the specific operational and service requirements of passenger-oriented UAM systems. These works typically consider single-use cases in isolation, overlooking the diversity of applications within UAM, each demanding different levels of bandwidth and quality of service. Managing bandwidth across concurrent UAM services, such as real-time flight control, system telemetry, passenger connectivity, and multimedia streaming, remains an unresolved and pressing issue. With the anticipated growth in eVTOL ridership, maintaining sufficient network capacity during periods of high demand is critical. Moreover, although HAPSs hold promise as stable, long-duration communication relays, their role within integrated UAM network architectures has yet to be fully investigated. This review identifies a key gap: the absence of unified, application-aware communication frameworks capable of supporting the complex and bandwidth-intensive service ecosystem of future UAM operations.
3. Materials and Methods
This study proposes a robust transmission architecture for UAM environments, specifically designed to meet the high-bandwidth, low-latency demands of multimedia video services for passengers aboard unmanned eVTOLs. As illustrated in
Figure 1, the architecture integrates HAPSs and eVTOLs with 6G-enabled base stations to ensure resilient air-to-ground communication. This integration enables high-speed data transmission, wide-area coverage, and seamless handovers across heterogeneous aerial nodes, ensuring uninterrupted video delivery in dynamic, mobile conditions.
Video streaming services in the system originate from both onboard and external sources. Passenger entertainment, such as YouTube, TikTok, and immersive 360-degree video, is typically downlinked from ground servers. In contrast, mission-critical applications, including aerial monitoring, emergency reporting, and real-time conferencing, require uplink transmission to ground control centers or cloud infrastructure.
The system supports these diverse transmission needs using 6G base stations equipped with mmWave and THz technologies as the primary communication interfaces. In dense urban environments, where signal attenuation is common due to physical obstructions, HAPSs operating at stratospheric altitudes provide additional coverage. These platforms utilize FSO for high-throughput communication and a hybrid FSO/RF downlink to maintain reliability under adverse weather conditions. This dual-layer architecture ensures resilient, low-latency connectivity for next-generation aerial networks.
Regional management servers are distributed across predefined geographic zones to handle mobility and dynamic network conditions. These servers continuously track the positions of eVTOLs and monitor bandwidth availability across connected nodes. Based on real-time metrics, bandwidth is dynamically allocated to optimize spectral efficiency. During periods of congestion, a cooperative relay mechanism is activated, enabling data forwarding through HAPS or neighboring eVTOLs connected to underutilized base stations, as illustrated by the dashed lines in
Figure 1.
Efficiency in video transmission is further enhanced by integrating SHVC, which allows for adaptive delivery of video layers based on current network conditions. A multicast tree-based content distribution strategy helps minimize redundancy and ease congestion in both core and edge networks. Additionally, the system selects the edge node nearest to the requesting eVTOL to reduce delivery latency and improve the user experience.
The system supports both planar and 360-degree video formats to meet the growing demand for immersive media. For 360-degree content, a tile-based streaming strategy is employed, where independently encoded tiles are transmitted with higher-quality layers prioritized for the predicted field of view (FoV), while only base layers are delivered to peripheral regions. This selective delivery conserves bandwidth and ensures smooth playback, even when FoV predictions are not fully accurate.
To maintain service quality and bandwidth efficiency, video content is classified into three priority levels: emergency, real time, and non-real time. Emergency applications, such as video feeds from air ambulances or disaster response operations, receive the highest priority, ensuring minimal transmission latency. Real-time services, including live streaming and video conferencing, are assigned secondary priority, with strict but slightly more flexible latency constraints. Non-real-time content, such as video-on-demand (VoD), is scheduled opportunistically during off-peak periods.
As outlined in
Table 1, the system comprises five core modules. Upon initiation of a video application by an eVTOL passenger, the “Video Bandwidth Allocation for Unmanned eVTOL Aircraft Passengers” module processes the initial bandwidth request. If the content is time sensitive, the “Critical Video Resource Allocation” module is activated; otherwise, the “Asynchronous Video Preloader” module handles non-urgent content. Lower-priority applications may be required to release bandwidth when higher-priority requests are made. If the available bandwidth remains insufficient, the system accesses underutilized base stations in uncongested areas. Additional resources are then relayed via HAPSs or other unmanned eVTOLs through either the “Critical Video Bandwidth Assistance Unit” module or the “Non-Critical Video Bandwidth Assistance Unit” module, depending on the urgency and bandwidth needs of the application.
The detailed functionality of each module is described below.
3.1. Video Bandwidth Allocation for Unmanned eVTOL Aircraft Passengers
This module is designed to request the required bandwidth for video applications from regional management servers along the flight path of an eVTOL aircraft. To alleviate potential congestion during peak periods, it dynamically adjusts the bandwidth allocated to non-critical video applications as needed, thereby improving overall bandwidth utilization.
Figure 2 presents a flowchart of this module. Prior to departure, the eVTOL must provide its origin, destination, and scheduled departure time. Based on these inputs and current flight conditions, the optimal flight route is assumed to be determined using a representative flight navigation algorithm from the recent literature [
36]:
where the route
can be divided into multiple sub-routes.
and
denote the origin and destination of eVTOL
, respectively, while
denotes the
j-th waypoint along the route.
After the eVTOL aircraft passenger launches a video streaming application, the system retrieves the video specifications and multicast tree node information from the video application service provider. The module then determines the waypoints that the eVTOL can reach within the predefined time interval
as follows:
subject to:
where
is defined as the complete trajectory between the aircraft’s present position and its final destination,
denotes a waypoint reachable within the time interval
,
refers to the
i-th waypoint on
and
represents the arrival time at waypoint
.
The constraint in Equation (2) governs the selection of the furthest waypoint that the eVTOL can reach along its planned trajectory within the specified time interval . The objective is to maximize the time span from the aircraft’s current position to the most distant reachable waypoint, as constrained by Equations (3) and (4). Specifically, Equation (4) ensures that the selected waypoint lies within the permissible time window starting from the current time , without exceeding the time required to reach the final destination. The use of the minimum function in Equation (4) serves a dual purpose: it prevents the selection of a waypoint beyond the planned trajectory and ensures that only those waypoints reachable within the time interval are considered.
The module transmits the calculated arrival time, video specifications, and multicast tree node information to the regional management server overseeing the waypoint. For time-sensitive video applications, the system activates the “Critical Video Resource Allocation” module; otherwise, it initiates the “Asynchronous Video Preloader” module. In scenarios where available bandwidth is insufficient to support video application demands, this module dynamically improves the handling of non-critical applications by reducing frame rates or resolutions, thereby lowering bandwidth consumption. The frame rate adjustment is performed as follows:
where
and
represent the upload and download frame rates for video
, respectively. Similarly,
and
denote upload and download bandwidth shortages within timeslot
between waypoints
and
, respectively. The variables
and
indicate the current time and video end time, respectively. The minimum frame rate allowed by the system is denoted as
, while
represents the frame rate corresponding to the quality level
specified by the aircraft passenger.
The adjustment for resolution is implemented as follows:
where
and
represent the upload and download resolutions for video
, respectively. The variable
denotes the minimum resolution set by the system, and
is the resolution for quality level
specified by the aircraft passenger.
The system dynamically modifies video frame rates and resolution to meet bandwidth requirements or until further adjustments become unfeasible. If the demand cannot be satisfied, the system alerts the aircraft passenger that the video application cannot be executed and deactivates the module.
3.2. Critical Video Resource Allocation
This module ensures that sufficient bandwidth is allocated to support emergency and real-time video services for eVTOL aircraft passengers, thereby maintaining a high level of service quality under varying network conditions. During periods of peak traffic and limited bandwidth availability, the module first reallocates bandwidth from non-critical video streams. If additional bandwidth is required, it then engages the “Critical Video Bandwidth Support” module to ensure critical video transmission. Further adjustments involve redistributing bandwidth from other real-time video applications to prioritize critical operations.
The flowchart of this module is illustrated in
Figure 3. Upon receiving a bandwidth request from an eVTOL, the system calculates the bandwidth required for video applications during each time slot of the flight, based on the arrival times at each waypoint. It then performs real-time validation of base station capacity to ensure minimum bandwidth thresholds are met for both emergency video streams and real-time operational feeds.
The calculation of upload and download bandwidth surpluses is as follows:
where the binary flag
indicates whether video
is a bidirectional real-time video. Specifically,
for bidirectional video, and
for unidirectional video.
represents the upload bandwidth that base station
can allocate to bidirectional video
when the eVTOL passes through
’s transmission range during time slot
. Similarly,
represents the download bandwidth that
can allocate to video
. The variables
and
denote the upload and download video resolutions for
in time slot
, while
and
stand for the upload and download frame rates. Additionally,
and
denote the upper limits for the video
’s resolution and frame rate, respectively.
The time slot is updated as follows:
where Δ is the length of a time slot. The start and end times of the video application must satisfy:
which ensures that the video playback duration falls within the eVTOL’s flight time range.
If either
or
becomes negative, the available bandwidth is insufficient to maintain video
’s minimum required rate. In this case, the following conditions are applied:
where
represents the regional management server index value of the sub-route
during time slot
. The variables
and
are used to identify areas with insufficient upload or download bandwidth.
At this stage, bandwidth initially allocated to non-critical video applications is reallocated to preserve critical video service quality. This involves assessing whether base stations along the eVTOL’s flight path can free up additional bandwidth from non-essential video streams.
The process determines the total bandwidth available for reallocation as below:
where
serves as the index for non-critical video applications, and the base stations tasked with managing bandwidth allocation to critical video
are represented by
. During time slot
, base station
can provide upload bandwidth
and download bandwidth
for bidirectional video
. Additionally,
and
correspond to the upload and download bandwidth reallocated from non-critical video to emergency or real-time video, respectively.
When or is non-zero, it indicates that the base station can reallocate part of its bandwidth initially assigned to non-critical video, directing it to critical video needs. This module will then notify the base station to execute the resource reallocation accordingly. If the reallocated bandwidth is still inadequate to fulfill the demands of critical video, this module queries other regional management servers along the video multicast tree nodes to determine whether the base stations in these regions can provide additional support. The priority for scheduling bandwidth is then determined based on the distance between the nodes and the eVTOL aircraft’s current waypoint.
The upload and download bandwidth scheduling priorities are defined as follows:
where
and
represent the sequences of multicast tree nodes that can allocate upload and download bandwidth to video
at time
, respectively. These sequences are sorted in ascending order of distance between each node and the waypoint
:
Based on the sorted sequences, the number of supporting multicast nodes is calculated as follows:
where
and
represent the number of supporting multicast nodes for upload and download bandwidth, respectively.
denotes the base station in the coverage of node
, which is obtained from
, and
represents the upload bandwidth that
can allocate to bidirectional video
at time
. Similarly,
denotes the base station in the coverage of node
, which is obtained from
, and
represents the download bandwidth available.
This module sequentially activates the regional management servers in the specified sequence to trigger the “Critical Video Bandwidth Support” module. The sequences
and
are updated iteratively as follows, until the bandwidth demand is satisfied or the sequences are empty:
If the bandwidth demand for the emergency video application still cannot be satisfied, the system reallocates bandwidth from other real-time video applications as follows:
3.3. Asynchronous Video Preloader
This module ensures the smooth playback of non-critical video while enhancing bandwidth usage efficiency. By employing a pre-download mechanism and a bandwidth scheduling strategy, it effectively facilitates the transmission of video segments. A flowchart of this module is illustrated in
Figure 4.
This module begins by setting the index of the most recent un-played video segment (
to zero. The remaining pre-download playback time length (
is set as
, which represents the upper limit of the pre-download video playback time defined by the system. This module then allocates base station bandwidth to download non-critical video segments until all segments are downloaded or the buffer reaches its capacity. The number of video segments (
) to be downloaded is dynamically adjusted based on the current state of the playback buffer:
where
represents the video segment
starting from index
;
is the time when the segment
starts downloading. The parameter
specifies the duration, in terms of allocated time slots, for uninterrupted downloading. The bandwidth provided by base station
at time
is given by
, which is used to download the segment
. The function
calculates the segment size, which is determined by its frame rate
, resolution
and playback duration
.
The process must satisfy several constraints. First, the available bandwidth must cover the size of the segments to be downloaded:
Second, the playback duration of the downloaded segments must meet flight requirements for uninterrupted playback before reaching the destination, ensuring proper playback order and buffer constraints:
where
and
represent the current time and the time when the eVTOL aircraft reaches its destination, respectively.
is the total number of video segments,
is the remaining buffer size before pre-downloading, and
is the total buffer size of the eVTOL aircraft.
After allocating bandwidth, this module updates the following variables:
If the video segments are not fully downloaded, the number of additional segments to be downloaded (
is calculated:
If the base station cannot provide sufficient bandwidth, the module queries other regional management servers along the video multicast tree nodes to determine if any node can forward at least one segment. The smallest video segment
is selected:
The system prioritizes downloading based on node distance and available bandwidth, forming sequences for node bandwidth (
, segment indices
, and node segment counts
, ensuring nodes providing the maximum bandwidth are prioritized. The sorting condition is as follows:
The total available bandwidth must also satisfy the following condition:
where
and
represent the
-th node in the sets
and
, respectively.
is the total number of nodes in the sets
,
and
.
refers to the base station within the coverage of node
, and
represents the bandwidth provided by base station
at time
.
The download process starts from the first segment index
, and the total number of segments to be downloaded
must equal the sum of the segments allocated by all participating nodes:
where
represents the number of video segments that node
in
can provide for download.
Once the multicast node prioritization and bandwidth allocation are complete, this module notifies the regional management servers controlling the nodes to activate the “Non-Critical Video Bandwidth Support” module. This module then allocates bandwidth from its managed base stations and forwards the required bandwidth to the requesting eVTOL aircraft passengers via other eVTOL aircraft and HAPS.
This module terminates when all video segments have been downloaded or when the eVTOL reaches its destination. If neither condition is met, the process is repeated at the next waypoint to ensure continuous playback, after updating the relevant variables accordingly:
3.4. Critical Video Bandwidth Assistance Unit
This module dynamically utilizes available bandwidth in non-congested regions to meet the real-time video bandwidth demands of eVTOL aircraft passengers, thereby enhancing overall network performance. As illustrated in
Figure 5, upon receiving a bandwidth support notification, the regional management server activates this module to assist in forwarding bandwidth. This module first uses navigation software [
37] to plan a route from the base stations within its management area to the eVTOL aircraft’s current position and queries other regional management servers along the route to obtain relevant information about HAPSs and other unmanned VTOL aircraft within their coverage areas. Based on the integrated path and available bandwidth, the server establishes a bandwidth transmission route and selects the upload and download paths using the following optimization criteria:
where
and
represent the number of upload and download connections for video
, respectively.
and
denote the index positions of the
i-th node on the
-th upload and download connection. Other parameters are defined similarly to those used in the previous modules.
To ensure bandwidth requirements are satisfied, the upload and download paths must meet the following constraints:
Additionally, adjacent nodes on each path must have sufficient residual bandwidth to satisfy the demand. For upload and download nodes, the constraints are as follows:
where
and
represent the number of upload and download nodes in the
-th ground-to-air connection, respectively.
and
represent the total bandwidth required for uploading and downloading from
to
at time
.
After completing the bandwidth path calculation and bandwidth allocation, this module sends the results back to the regional management server that initiated the request.
3.5. Non-Critical Video Bandwidth Assistance Unit
Similar to the preceding module, this module is designed to facilitate the pre-download of non-critical video segments by establishing enhanced support paths that satisfy the required pre-download bandwidth. As illustrated in
Figure 6, upon receiving a bandwidth support request, the regional management server activates this module to compute the path from the base stations to the requesting eVTOL and allocate available bandwidth to complete the pre-download of video segments. This module then queries other regional management servers along the planned route to gather information about HAPSs and other unmanned eVTOL aircraft within their coverage areas, enabling collaborative resource allocation across network regions.
The key distinction between this module and the preceding one lies in its design focus. This module aims to fulfill the size requirements for pre-downloaded video segments by selecting paths that enhance performance based on the following objective function:
where
represents the number of connections used to forward video segments, and
denotes the index of the
-th node in the
-th connection. Other parameters are defined as described in
Section 3.3.
To ensure that the selected paths meet the pre-download requirements, the total bandwidth of the paths must be greater than or equal to the total size of the video segments:
Additionally, the residual bandwidth at each node along the path must be greater than or equal to the bandwidth demand for pre-downloading the video segments:
where
represents the residual bandwidth at time
from node
to node
, while
represents the total bandwidth demand for downloading video segments between these nodes.
indicates the number of nodes in the
-th connection.
4. Results and Discussion
This section presents the simulation results and analysis to validate the effectiveness of the proposed strategy. Since 6G and UAM technologies are still in development, real-world data are not yet available. Consequently, an ad hoc simulator was developed for this study to assess the performance of the proposed bandwidth allocation and scheduling approach under varying traffic conditions. The simulator operates at the system level rather than the physical or link layer, abstracting low-level communication protocols and focusing on mission-level traffic modeling, frequency resource limitations, and service prioritization across heterogeneous frequency bands. In the simulation, mmWave and THz ground base stations are modeled as the primary bandwidth sources for eVTOLs, while FSO/RF-based HAPS act as relays.
Table 2 summarizes the maximum bandwidth and transmission range associated with each communication technology, including the effective transmission range for THz communications. These parameters are based on established experimental and theoretical studies [
38,
39,
40], providing a realistic basis for simulation. Communication between eVTOLs is also facilitated via mmWave and THz links.
To simulate air traffic, vehicular traffic data provided in [
41] were adapted to represent aerial traffic flow. The origins and destinations of eVTOLs were randomly generated, and their video bandwidth requirements are summarized in
Table 3 [
42,
43,
44,
45]. Notably, video conferencing applications involve bidirectional data transmission, requiring both uplink and downlink bandwidth. And emergency video applications may involve multi-angle video transmission. For rigorous evaluation, this study configures emergency video applications as 360-degree video conferencing, where video quality cannot be degraded to avoid blurriness, which could critically impact the intended outcome.
The simulation assumes optimal wireless channels for eVTOLs, employing 10 s time slots and 1000-millisecond video packets. Every aircraft has storage resources that dwarf the size of cached video material. Using traffic density data from [
41], the variation in eVTOL aircraft numbers was simulated over a 24 h period.
Figure 7 demonstrates that the eVTOL aircraft numbers follow a bimodal distribution, aligning with the time-dependent characteristics of urban traffic demand patterns.
The number of eVTOLs is lowest during the early-morning hours, rising sharply to a peak between 6:00 AM and 8:00 AM, driven by increased morning commuting and logistics demands. Following this peak, the numbers gradually decline, reflecting off-peak traffic characteristics. In the afternoon, eVTOL activity surges again, reaching the highest daily peak between 6:00 PM and 7:00 PM, corresponding to the evening commuting rush. As nighttime traffic demand diminishes, eVTOL operations decrease significantly, stabilizing below 3000 after midnight.
Figure 8 illustrates the daily variation trends in demand for different types of video content. The proportions and frequencies of video usage are estimated based on website data from [
46,
47,
48,
49,
50,
51,
52]. The simulation results reveal distinct time-based distribution patterns for video demand, including morning and evening peaks that align closely with aerial traffic activity. As shown in the figure, demand for 2D video is higher than that for 360-degree video. This preference stems from 2D video’s significantly lower bandwidth requirements and broader compatibility with existing devices and technologies. As a result, under current network bandwidth limitations, users are more likely to choose 2D video. Additionally, the higher demand for VoD can be attributed to its flexibility in playback, enabling users to watch content at their convenience. In contrast, live streaming and video conferencing require participants to be online simultaneously, leading to comparatively lower demand.
Figure 9 shows the bandwidth requirements of an unmanned eVTOL aircraft when performing different types of video tasks in a day. These demands are estimated based on the usage frequency of video applications at various time intervals, with resolution and frame rates randomly selected from
Table 3. Emergency video and 360-degree video conferencing consistently exhibit high bandwidth demand due to their bidirectional nature, requiring users to simultaneously upload and download video streams. Additionally, 360-degree video demands substantial bandwidth to deliver an immersive, panoramic viewing experience, a trend also observed in live streaming scenarios. In contrast, 2D VoD ranks third in bandwidth demand, driven by its widespread usage. For clarity, subsequent figures will categorize the data by video application types, including emergency video applications, real-time video applications (2D/360-degree video streaming, interactive video session), and non-critical applications (2D/360-degree VoD).
To evaluate the effectiveness of the proposed framework, a state-of-the-art aerial video streaming algorithm from the recent literature [
23], referred to as I-SAC, was selected for comparison.
Figure 10a,b illustrate the bandwidth allocation and corresponding satisfaction ratios for various application types over a 24 h period using the I-SAC algorithm. As shown in
Figure 11b, the satisfaction ratio reaches 100% during nighttime (11:00 PM to 6:00 AM), indicating that demand remains within manageable limits. However, during daytime hours, when bandwidth is limited, competition among video applications becomes evident. During both morning and evening peaks,
Figure 10a reveals that the bandwidth allocation for emergency video applications is notably insufficient. In some instances, allocation for emergency applications even falls below that for non-real-time applications, with satisfaction ratios dropping to below 20%. This shortfall could hinder critical tasks, potentially leading to severe consequences.
Although real-time video applications are allocated a relatively larger share of bandwidth, they still suffer from competition with non-real-time applications, leading to suboptimal resource allocation. This issue is highlighted in
Figure 10b, where non-real-time applications achieve higher satisfaction ratios than both emergency and real-time categories. These findings indicate that the I-SAC algorithm does not effectively prioritize video applications based on their importance and timeliness.
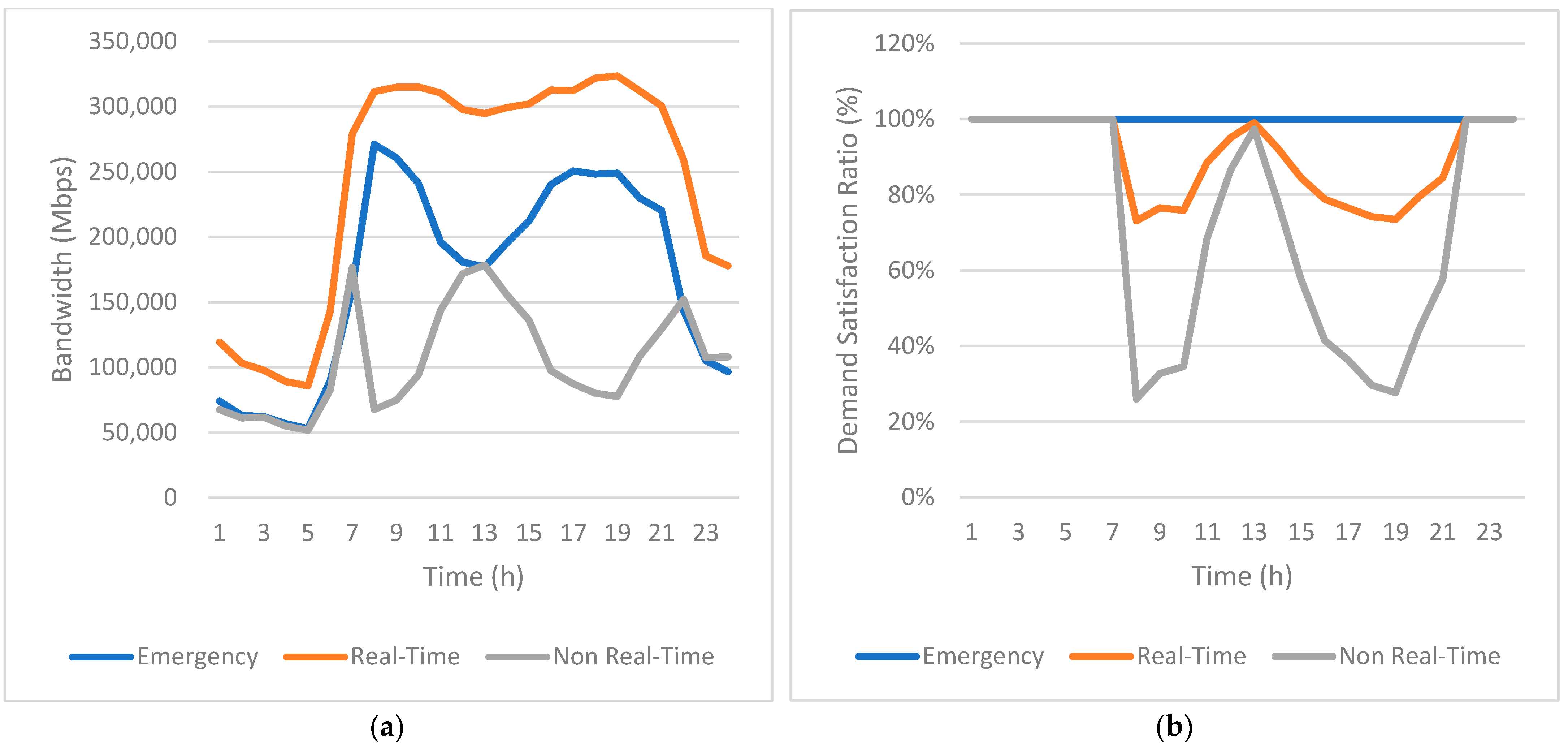
In comparison, as illustrated in
Figure 11a,b, the proposed mechanism focuses on allocating bandwidth to critical video applications under identical conditions. Throughout the day, the allocation for emergency video applications shows significant improvement throughout the day. Notably, during peak hours, the system fully satisfies the bandwidth demands of emergency applications. This demonstrates that the proposed method effectively ensures the reliability, timeliness, and stability of critical services, mitigating the impact of resource competition.
Furthermore, the satisfaction ratio for real-time video applications also improves, demonstrating that the proposed method allocates bandwidth more efficiently and mitigates the impact of competition during high-load periods. While the satisfaction ratio for non-critical video applications decreases during peak hours, this reflects a deliberate trade-off to prioritize critical tasks. However, during off-peak periods, the demands for non-critical video applications are consistently met.
Figure 12 compares the performance of the I-SAC algorithm and the proposed method in meeting video service demands over a 24 h period. A notable performance gap is evident, especially during periods of network congestion. Under the I-SAC algorithm, the video application satisfaction ratio falls below 60% during peak hours of user activity. In contrast, the proposed method employs a video bandwidth support module alongside a non-critical video pre-download module, which effectively capitalizes on available bandwidth during off-peak periods. As a result, the system achieves a 45% enhancement in overall resource utilization.
Additionally, the video bandwidth allocation module dynamically adjusts eVTOL aircraft passengers’ video demands, further reducing bandwidth requirements. Consequently, the proposed method achieves a higher satisfaction ratio, surpassing traditional approaches and ensuring more reliable service delivery.
5. Conclusions
This study presents a network architecture for video streaming transmission in UAM, leveraging advanced communication technologies such as mmWave, THz, and FSO communications to achieve high transmission rates and efficient video delivery. To address the coverage limitations of ground base stations, HAPSs are integrated, offering wide-area coverage and enhancing the communication system’s reliability and availability.
In terms of bandwidth allocation, a priority-oriented mechanism is proposed based on the significance of video application scenarios for eVTOL aircraft passengers. This mechanism ensures that high-priority demands, such as emergency and real-time video applications, are met effectively. During peak traffic times, including morning and evening rush hours, the I-SAC algorithm performs poorly in meeting high-priority demands, as evidenced by satisfaction levels plummeting below 20% in simulations.
In contrast, the proposed method introduces a relay mechanism and a pre-download strategy, improving the utilization of remaining bandwidth in non-congested regions. As a result, the system is able to meet the bandwidth requirements of emergency video applications even during peak hours, significantly enhancing their satisfaction ratios. Bandwidth allocation for real-time video applications also increases substantially, providing strong support for high-priority scenarios. However, due to overall bandwidth limitations, a small portion of non-critical video demands are moderately compromised to ensure the delivery of emergency and real-time applications. These results demonstrate the effectiveness of the proposed mechanism and underscore the rationality of its resource allocation strategy.
Low latency is essential for real-time video services; however, the current model does not impose strict delay constraints, as the primary objective is to explore architectural design and bandwidth scheduling strategies. Latency-related factors will be addressed in future work. Additionally, this study focuses exclusively on application-layer video streaming services, which are functionally decoupled from flight-critical Command and Control (C2) communications. C2 traffic—vital to the safe operation of eVTOL aircraft—demands far stricter latency and reliability guarantees and is, therefore, beyond the scope of the current simulation. Nonetheless, due to its critical importance in unmanned aerial operations, future work will incorporate C2 communications into the simulation framework to enable a more holistic evaluation of bandwidth allocation strategies in UAM networks. Further research may also investigate the use of machine learning techniques to enhance predictive bandwidth management and support adaptive resource allocation in highly dynamic aerial environments.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}