


A Coverage-Based Cooperative Detection Method for CDUAV: Insights from Prediction Error Pipeline Modeling


Abstract
1. Introduction
- (1)
- The nonlinear least squares method is used to fit the parameters of the target motion model, and the recursive expression of the error pipeline for trajectory prediction under the t-distribution is derived according to the theory of error propagation to construct a parameterized model of the target HPR. In terms of error prediction, compared with statistical methods such as Monte Carlo simulation, the error pipeline envelope has faster convergence speed and stronger generalization.
- (2)
- A cooperative detection coverage optimization solution framework is proposed to analyze the multi-interceptor cooperative detection capture posture in conjunction with handover window. The problem is transformed into a two-dimensional detection cross-section of the FOV coverage optimization problem for HPR, which leads to the construction of an ellipsoidal model for HPR under a small-sample distribution with stronger generalizability and a seeker detection FOV model. The FOV coverage objective function and the corresponding boundary constraints are established to form closed-loop problem-solving.
- (3)
- Drawing on the WSN coverage optimization scheme, the geometric coverage optimization problem of mismatch between the target HPR and the FOV pattern is solved, and the Starfish intelligent optimization algorithm is adopted to accelerate the solution efficiency and further expand the solution ideas of the cooperative detection coverage optimization problem.
2. Prediction Error Pipeline Modeling
2.1. CDUAV Motion Model
2.2. CDUAV Trajectory Prediction Error Propagation Model
2.2.1. Filter Error Propagation Model
2.2.2. Parametric Error Propagation Model
2.2.3. Integrated Error Propagation Model
2.3. CDUAV Trajectory Prediction Error Pipeline Model
2.4. CDUAV Trajectory Prediction Error Numerical Simulation
2.4.1. Trajectory Error Pipeline Simulation
- Both the parametric modeling method and the Monte Carlo method of the longitudinal error envelope Xm, Xp can completely cover the target within 150 s, which is related to the fact that the target does not do maneuvering in this direction, and the two methods can fit the predicted trajectory highly, and the accuracy of the characterization of the target’s true position is 100% in this dimension.
- The Monte Carlo method’s latitudinal error envelope for the 150 s target complete coverage of the length of time from 3 s to 150 s has an average value of 116, with the coverage of the distribution of the length of time values as shown in the Figure 3 of the Ym yellow box plot; the characterization of the target’s true position accuracy is about 77.33%. The parametric modeling method’s latitudinal error envelope for the 150 s target complete coverage of the length of time from 28 s to 150 s has an average value of 145, with the coverage of the time distribution of values as shown in the figure of the Ym yellow box plot; the accuracy of characterizing the target’s true position is about 77.33%. The average value is 145, and the distribution value of the coverage time is shown in the box plot corresponding to Yp in Figure 3. The characterization accuracy of the target’s real position is about 96.67%; the data results are related to the target’s lateral maneuvering mode, and the experimental condition is that the target is doing a swinging maneuver in the lateral direction.
- The Monte Carlo method’s skyward error envelope for 150 s within the target complete coverage of the length of time from 1 s to 150 s has an average value of 103, with the coverage of the length of the distribution of values shown in the Figure 3 Zm corresponding to the dark green box plot; the characterization of the target’s true position accuracy is about 68.67%. The parametric modeling method’s latitudinal error envelope for 150 s within the target complete coverage of the length of time from 8 s to 150 s has an average value of 115, and the distribution value of the coverage time is shown in the light green box plot of Zp2 in Figure 3. The characterization accuracy of the real position of the target is about 76.67%; the data results are related to the target’s longitudinal maneuvering mode, and the experimental condition is that the target is performing a jumping glider maneuver in the longitudinal direction.
2.4.2. Distance-Dimensional Error Distribution Simulation
- Longitudinal dimension: The target exhibits minimal maneuverability, resulting in relatively minor errors.
- Latitudinal dimension: Limited overload capacity constrains maneuver amplitude, leading to stable latitudinal errors.
- Skyward dimension: The target’s complex longitudinal jump-glide motion significantly increases tracking and prediction challenges, causing altitude errors to dominate compared to longitudinal and latitudinal errors.
3. Collaborative Detection Coverage Optimization Method
3.1. Problem Description and Transformation
- Distance acquisition: The seeker activates when the line-of-sight distance falls below its detection distance.
- Angular acquisition: The target must enter the seeker detection FOV with sufficient reflected signal strength.
- Velocity acquisition: Frequency scanning must confirm the target velocity to finalize the handover.
3.2. Coverage Optimization Problem Modeling
3.2.1. Target HPR Modeling
3.2.2. Seeker Detection FOV Modeling
3.2.3. Coverage Optimization Objective Functions
3.3. Introduction of SFOA
3.3.1. Initialization
3.3.2. Exploration
- For problems with dimensionality > 5
- For problems with dimensionality ≤ 5
3.3.3. Exploitation
- Predation Simulation
- Regeneration Simulation
3.3.4. Algorithmic Applications
- Step 1: In the initialization phase, set a reasonable population size, i.e., the number of starfish and the maximum number of iterations. Randomly generate the corresponding number of population matrices under the boundary constraints (i.e., within the HPR ellipse region). Calculate the initial fitness values (i.e., FOV coverage) of all starfish according to the objective function. Then, enter it into the algorithm’s main loop.
- Step 2: According to the random number to determine whether to enter the exploration or development phase, this is represented as in Figure 7, indicating that the algorithm sets the probability of the exploration and development phases to be the same, with balance.
- Step 3: Enter the exploration phase. The algorithm designs two starfish position updating rules based on different dimensions to satisfy different sizes of the search space and improve the exploration efficiency. For the coverage optimization problem, when the number of fields of view is greater than five, the starfish position is updated by Equation (41), and the updated FOV coverage is calculated; when the number of fields of view is less than or equal to 5, it is updated by Equation (42).
- Step 4: Enter the development phase. The algorithm adopts a parallel bidirectional search strategy, which enhances the development of the optimization problem, overcomes the local optimality problem, and facilitates the coverage optimization problem to seek the optimal solution in all regions of the target HPR.
- Step 5: The conditional termination phase continuously evaluates the current optimal positions of all the starfish and calculates the corresponding optimal solution, i.e., iterates the value of the FOV coverage through the two balanced parallel sessions of exploration and exploitation. When the maximum number of iterations is satisfied, the loop is stopped, and the final global optimal solution and the best position of the starfish, i.e., the maximum FOV coverage and the corresponding FOV center coordinates, are output.
4. Simulation Analysis
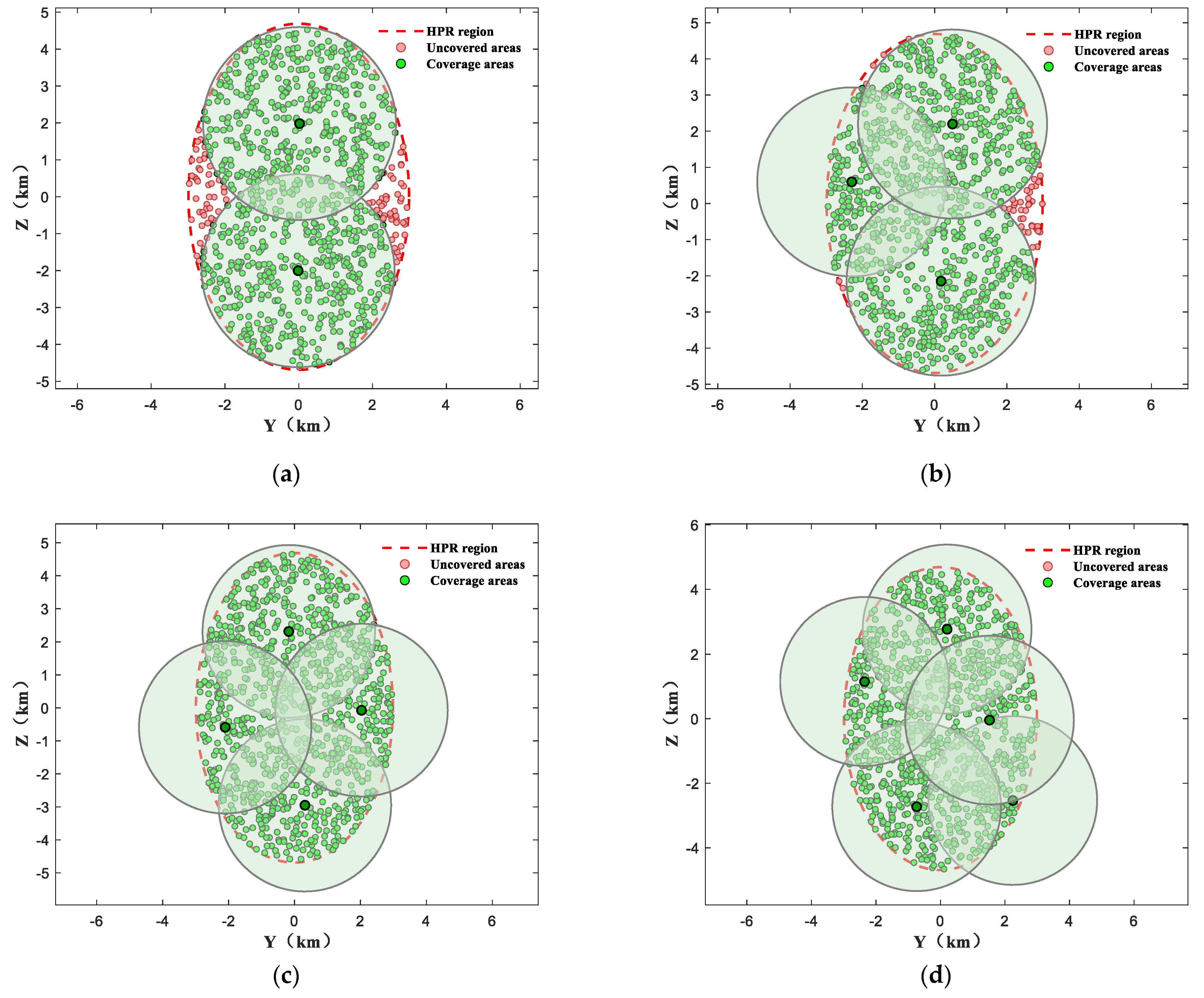
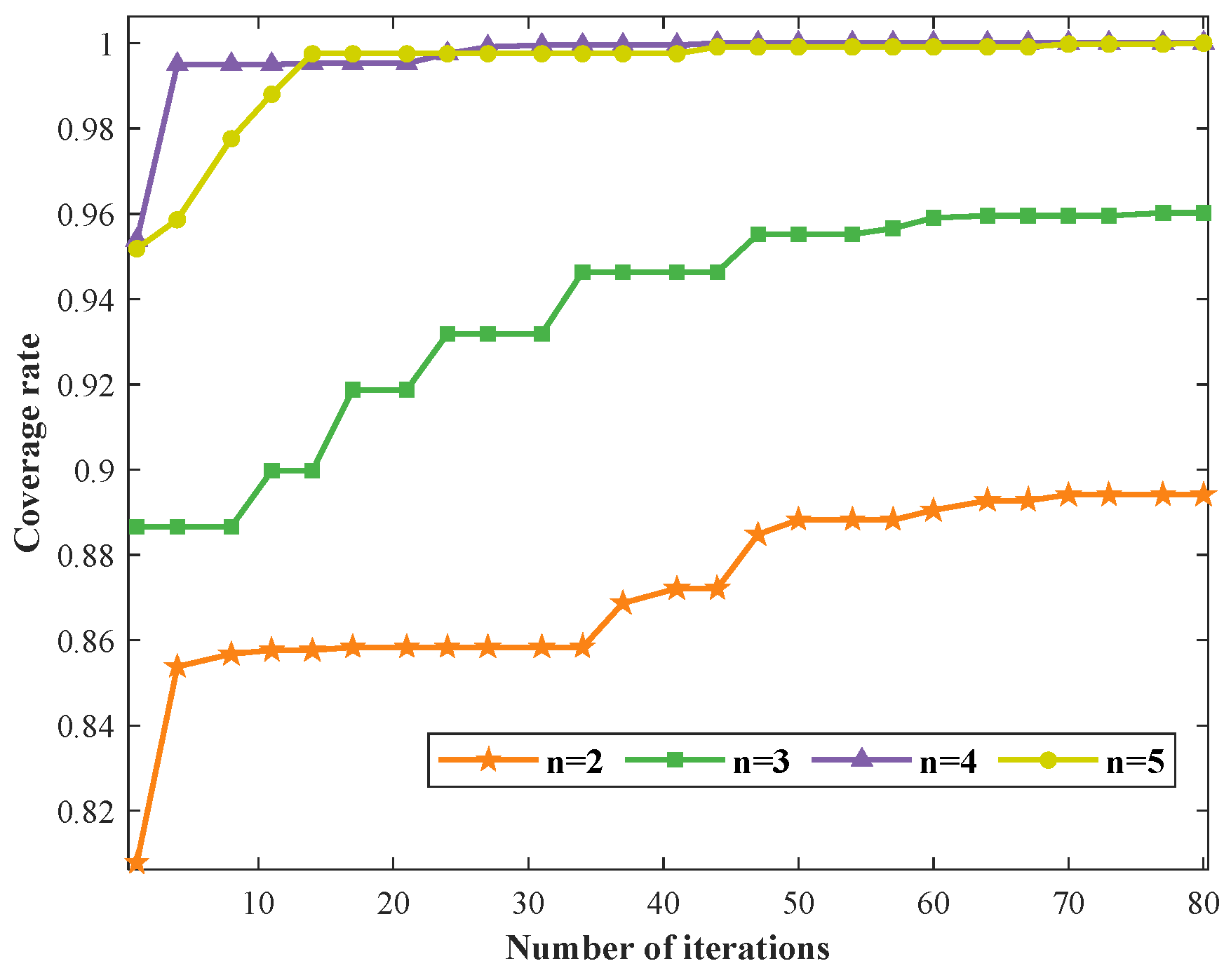
4.1. Coverage Optimization Simulation with Different Numbers of Interceptors
4.2. Coverage Optimization Simulation Under Time-Varying Target HPR
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ding, Y.B.; Yue, X.K.; Chen, G.S.; Si, J.S. Review of control and guidance technology on hypersonic vehicle. Chin. J. Aeronaut. 2022, 35, 1–18. [Google Scholar] [CrossRef]
- Fan, Y.; Lu, F.; Zhu, W.X.; Bai, G.Z.; Yan, L. A Hybrid Model Algorithm for Hypersonic Glide Vehicle Maneuver Tracking Based on the Aerodynamic Model. Appl. Sci. 2017, 7, 159. [Google Scholar] [CrossRef]
- Liu, F.R.; Lu, L.N.; Zhang, Z.H.; Xie, Y.; Chen, J. Intelligent Trajectory Prediction Algorithm for Hypersonic Vehicle Based on Sparse Associative Structure Model. Drones 2024, 8, 505. [Google Scholar] [CrossRef]
- Jeon, B.J.; Bang, J.; Park, B.G.; Ahn, J.; Tahk, M.J. Guidance scheme for operating multiple ship defense missiles with dual seekers. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2016, 230, 601–614. [Google Scholar] [CrossRef]
- Kang, H.L.; Wang, P.Y.; Song, S.M. A generalized three-dimensional cooperative guidance law for various communication topologies with field-of-view constraint. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2023, 237, 2353–2369. [Google Scholar] [CrossRef]
- Lee, C.H.; Hyun, C.; Lee, J.G.; Choi, J.Y.; Sung, S. A Hybrid Guidance Law for a Strapdown Seeker to Maintain Lock-on Conditions against High Speed Targets. J. Electr. Eng. Technol. 2013, 8, 190–196. [Google Scholar] [CrossRef]
- Li, F.; Xiong, J.J.; Lan, X.H.; Bi, H.K.; Chen, X. NSHV trajectory prediction algorithm based on aerodynamic acceleration EMD decomposition. J. Syst. Eng. Electron. 2021, 32, 103–117. [Google Scholar] [CrossRef]
- Maeder, U.; Morari, M.; Baumgartner, T.I. Trajectory Prediction for Light Aircraft. J. Guid. Control Dyn. 2011, 34, 1112–1119. [Google Scholar] [CrossRef]
- Ren, J.H.; Wu, X.; Liu, Y.; Ni, F.; Bo, Y.M.; Jiang, C.H. Long-Term Trajectory Prediction of Hypersonic Glide Vehicle Based on Physics-Informed Transformer. IEEE Trans. Aerosp. Electron. Syst. 2023, 59, 9551–9561. [Google Scholar] [CrossRef]
- Wei, X.Q.; Gu, L.F.; Li, R.K.; Wang, S.Y. Trajectory Tracking and Prediction of Hypersonic Vehicle Based on Singer Model. Aerosp. Control 2017, 35, 62–66+72. (In Chinese) [Google Scholar] [CrossRef]
- Li, F.; Xiong, J.J.; Lan, X.H.; Bi, H.K.; Tan, X.S. Hypersonic Vehicle Trajectory Prediction Algorithm Based on Hough Transform. Chin. J. Electron. 2021, 30, 918–930. [Google Scholar] [CrossRef]
- Sun, L.H.; Yang, B.Q.; Ma, J. Trajectory prediction in pipeline form for intercepting hypersonic gliding vehicles based on LSTM. Chin. J. Aeronaut. 2023, 36, 421–433. [Google Scholar] [CrossRef]
- Zhai, D.L.; Lei, H.M.; Li, J.; Liu, T. Trajectory prediction of hypersonic vehicle based on adaptive IMM. Acta Aeronaut. Et Astronaut. Sin. 2016, 37, 3466–3475. (In Chinese) [Google Scholar]
- Hu, Y.D.; Gao, C.S.; Li, J.L.; Jing, W.X.; Li, Z. Novel trajectory prediction algorithms for hypersonic gliding vehicles based on maneuver mode on-line identification and intent inference. Meas. Sci. Technol. 2021, 32, 115012. [Google Scholar] [CrossRef]
- Yoon, S.; Jang, D.; Yoon, H.; Park, T.; Lee, K. GRU-Based Deep Learning Framework for Real-Time, Accurate, and Scalable UAV Trajectory Prediction. Drones 2025, 9, 142. [Google Scholar] [CrossRef]
- Lu, S.N.; Qian, Y. Enhanced Trajectory Forecasting for Hypersonic Glide Vehicle via Physics-Embedded Neural ODE. Drones 2024, 8, 377. [Google Scholar] [CrossRef]
- Procházka, O.; Novák, F.; Báca, T.; Gupta, P.M.; Penicka, R.; Saska, M. Model predictive control-based trajectory generation for agile landing of unmanned aerial vehicle on a moving boat. Ocean Eng. 2024, 313, 119164. [Google Scholar] [CrossRef]
- Hu, X.; Wang, X.; Jiang, X.; Wang, Z.; Qin, S.; Lai, J. Uncertain trajectory prediction of hypersonic flight vehicles based on Gaussian process regression. Aerosp. Technol. 2022, 4, 49–61. (In Chinese) [Google Scholar] [CrossRef]
- Li, M.J.; Zhou, C.J.; Shao, L.; Lei, H.M. An Intelligent Trajectory Prediction Algorithm for Hypersonic Glide Targets Based on Maneuver Mode Identification. Int. J. Aerosp. Eng. 2022, 2022, 1–17. [Google Scholar] [CrossRef]
- Lee, S.; Ann, S.; Cho, N.; Kim, Y. Capturability of Guidance Laws for Interception of Nonmaneuvering Target with Field-of-View Limit. J. Guid. Control Dyn. 2019, 42, 869–884. [Google Scholar] [CrossRef]
- Liu, S.; Lin, Z.; Huang, W.; Yan, B. Technical Development and Future Prospects of Cooperative Terminal Guidance Based on Knowledge Graph Analysis: A Review. J. Zhejiang Univ.-Sci. A 2024, in press. [Google Scholar]
- Liu, S.X.; Lin, Z.H.; Huang, W.; Yan, B.B. Current development and future prospects of multi-target assignment problem: A bibliometric analysis review. Def. Technol. 2025, 43, 44–59. [Google Scholar] [CrossRef]
- Zheng, Z.; Cai, S.C. A collaborative target tracking algorithm for multiple UAVs with inferior tracking capabilities. Front. Inf. Technol. Electron. Eng. 2021, 22, 1334–1350. [Google Scholar] [CrossRef]
- Zhou, M.; Li, J.Y.; Wang, C.; Wang, J.; Wang, L. Applications of Voronoi Diagrams in Multi-Robot Coverage: A Review. J. Mar. Sci. Eng. 2024, 12, 1022. [Google Scholar] [CrossRef]
- Drezner, T.; Drezner, Z. Voronoi diagrams with overlapping regions. OR Spectr. 2013, 35, 543–561. [Google Scholar] [CrossRef]
- Zhou, J.; Lei, H.M. Coverage-based cooperative target acquisition for hypersonic interceptions. Sci. China Technol. Sci. 2018, 61, 1575–1587. [Google Scholar] [CrossRef]
- Luo, C.X.; Zhou, C.J.; Bu, X.W. Multi-Missile Phased Cooperative Interception Strategy for High-Speed and Highly Maneuverable Targets. IEEE Trans. Aerosp. Electron. Syst. 2025, 61, 1971–1996. [Google Scholar] [CrossRef]
- Chaturvedi, P.; Daniel, A.K. A Comprehensive Review on Scheduling Based Approaches for Target Coverage in WSN. Wirel. Pers. Commun. 2022, 123, 3147–3199. [Google Scholar] [CrossRef]
- Lee, J.W.; Lee, J.J. Ant-Colony-Based Scheduling Algorithm for Energy-Efficient Coverage of WSN. IEEE Sens. J. 2012, 12, 3036–3046. [Google Scholar] [CrossRef]
- Yue, Y.G.; Cao, L.; Zhang, Y. Novel WSN Coverage Optimization Strategy Via Monarch Butterfly Algorithm and Particle Swarm Optimization. Wirel. Pers. Commun. 2024, 135, 2255–2280. [Google Scholar] [CrossRef]
- Zhu, C.; Zheng, C.L.; Shu, L.; Han, G.J. A survey on coverage and connectivity issues in wireless sensor networks. J. Netw. Comput. Appl. 2012, 35, 619–632. [Google Scholar] [CrossRef]
- Deif, D.S.; Gadallah, Y. Classification of Wireless Sensor Networks Deployment Techniques. IEEE Commun. Surv. Tutor. 2014, 16, 834–855. [Google Scholar] [CrossRef]
- Anusuya, P.; Vanitha, C.N.; Cho, J.H.Y.; Easwaramoorthy, S.V. A comprehensive review of sensor node deployment strategies for maximized coverage and energy efficiency in wireless sensor networks. Peerj Comput. Sci. 2024, 10, e2407. [Google Scholar] [CrossRef]
- Zhang, B.L.; Zhou, D.; Li, J.L.; Yao, Y.H. Coverage-Based Cooperative Guidance Strategy by Controlling Flight Path Angle. J. Guid. Control Dyn. 2022, 45, 972–981. [Google Scholar] [CrossRef]
- Zhai, C.; He, F.H.; Hong, Y.G.; Wang, L.; Yao, Y. Coverage-Based Interception Algorithm of Multiple Interceptors Against the Target Involving Decoys. J. Guid. Control Dyn. 2016, 39, 1646–1652. [Google Scholar] [CrossRef]
- Su, W.S.; Li, K.B.; Chen, L. Coverage-based three-dimensional cooperative guidance strategy against highly maneuvering target. Aerosp. Sci. Technol. 2019, 85, 556–566. [Google Scholar] [CrossRef]
- Li, J.; He, Y.C.; Shao, L.; Feng, X.H. Reentry glide vehicle trajectory prediction method via multidimensional intention fusion. Aerosp. Sci. Technol. 2025, 159, 109960. [Google Scholar] [CrossRef]
- Wang, H.J.; Lei, H.M.; Zhang, D.Y.; Zhou, J.; Shao, L. Midcourse and terminal guidance handover window for interceptor against near space hypersonic target. J. Natl. Univ. Def. Technol. 2018, 40, 1–8. (In Chinese) [Google Scholar]
- Jia, H.M.; Meng, B.; Wei, Y.H.; Li, S.L. Improved arithmetic optimization algorithm for wireless sensor network coverage. J. Minnan Norm. Univ. Nat. Sci. 2022, 35, 54–61. (In Chinese) [Google Scholar] [CrossRef]
- Izci, D.; Ekinci, S.; Jabari, M.; Bajaj, M.; Blazek, V.; Prokop, L.; Yildiz, A.R.; Mirjalili, S. A new intelligent control strategy for CSTH temperature regulation based on the starfish optimization algorithm. Sci. Rep. 2025, 15, 12327. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Meaning | Parameter | Meaning |
|---|---|---|---|
| geocentric distance | flight path angle | ||
| Latitude | heading angle | ||
| longitude | bank angle | ||
| velocity | aerodynamic lift | ||
| mass | aerodynamic drag |
| State Variables | Error Comparison | Time Comparison |
|---|---|---|
| Longitudinal Error X | 4.3038 km/5.5508 km | 0.0901 s/15.8207 s |
| Lateral Error Y | 4.4744 km/2.3535 km | |
| Skyward Error Z | 7.0121 km/6.0193 km |
| No. of Simulations | Xm | Xp | Ym | Yp | Zm | Zp |
|---|---|---|---|---|---|---|
| 1 | 150 s | 150 s | 150 s | 17 s | 150 s | 150 s |
| 2 | 150 s | 150 s | 150 s | 150 s | 8 s | 43 s |
| 3 | 150 s | 150 s | 150 s | 150 s | 72 s | 149 s |
| … | … | … | … | … | … | … |
| 98 | 150 s | 150 s | 146 s | 150 s | 150 s | 150 s |
| 99 | 150 s | 150 s | 132 s | 150 s | 11 s | 15 s |
| 100 | 150 s | 150 s | 150 s | 150 s | 15 s | 19 s |
| Predicted Durations | Longitudinal Error | Lateral Error | Skyward Error |
|---|---|---|---|
| 50 s | 1.4442 km | 1.5028 km | 2.3606 km |
| 75 s | 2.1591 km | 2.2462 km | 3.5261 km |
| 100 s | 2.8740 km | 2.9892 km | 4.6897 km |
| 125 s | 3.5889 km | 3.7319 km | 5.8516 km |
| 150 s | 4.3038 km | 4.4744 km | 7.0121 km |
| Simulation Conditions | Parameter Settings |
|---|---|
| Population size of SFOA | 15 |
| Iterations of SFOA | 80 |
| Range of HPR | latitudinal error Y ≈ 2.99 km, orientation error Z ≈ 4.69 km |
| Diameter of FOV | L ≈ 5.23 km |
| Number of interceptors | M = [2, 3, 4, 5] |
| Serial No. | No. of Interceptors | Coverage Rate | Convergence Time | Relative Center of FOV |
|---|---|---|---|---|
| 1 | 2 | 89.0% | 0.170 s | (−0.0177, −2.0032) (0.0204, 1.9827) |
| 2 | 3 | 96.0% | 0.220 s | (−2.2927, 0.5971) (0.1789, −2.1483) (0.4959, 2.1983) |
| 3 | 4 | 100% | 0.292 s | (0.3164, −2.9508) (−0.1732, 2.3160) (2.0324, −0.0715) (−2.1023, −0.5872) |
| 4 | 5 | 100% | 0.268 s | (2.2424, −2.5345) (−0.7378, −2.7265) (0.2049, 2.7718) (−2.3531, 1.1493) (1.5194, −0.0433) |
| Simulation Conditions | Parameter Settings |
|---|---|
| Range of HPR | Latitudinal error Y ≈ 2.25 km, Skyward error Z ≈ 3.53 km At 0.1 km/trip, accumulate 20 times |
| FOV diameter | L ≈ 5.23 km |
| Number of interceptors | First group M = 3; Second group M adapted |
| coverage rate | Second group ≥ 95% |
| Serial No. | Range of HPR | Coverage Rate | Convergence Time |
|---|---|---|---|
| 1–4 | Y = 2.2–2.5, Z = 3.5–3.8 | 100% | 0.13 s |
| 5 | Y = 2.6, Z = 3.9 | 99.91% | 0.15 s |
| 6 | Y = 2.7, Z = 4.0 | 99.54% | 0.15 s |
| 7 | Y = 2.8, Z = 4.1 | 98.84% | 0.16 s |
| 8 | Y = 2.9, Z = 4.2 | 97.83% | 0.16 s |
| 9 | Y = 3.0, Z = 4.3 | 96.70% | 0.17 s |
| 10 | Y = 3.1, Z = 4.4 | 95.15% | 0.18 s |
| 11 | Y = 3.2, Z = 4.5 | 93.84% | 0.19 s |
| 12 | Y = 3.3, Z = 4.6 | 92.48% | 0.19 s |
| 13 | Y = 3.4, Z = 4.7 | 90.82% | 0.20 s |
| 14 | Y = 3.5, Z = 4.8 | 89.25% | 0.21 s |
| 15 | Y = 3.6, Z = 4.9 | 87.64% | 0.23 s |
| 16 | Y = 3.7, Z = 5.0 | 86.19% | 0.23 s |
| 17 | Y = 3.8, Z = 5.1 | 84.40% | 0.23 s |
| 18 | Y = 3.9, Z = 5.2 | 82.80% | 0.25 s |
| 19 | Y = 4.0, Z = 5.3 | 80.36% | 0.27 s |
| 20 | Y = 4.1, Z = 5.4 | 79.46% | 0.26 s |
| Serial No. | Numbers | Range of HPR | Coverage Rate | Time |
|---|---|---|---|---|
| 1–6 | 3 | Y = 2.25~2.75, Z = 3.53~4.03 | 97.0~100% | 0.14~0.17 s |
| 7–9 | 4 | Y = 2.85~3.05, Z = 4.13~4.33 | 96.6~99.1% | 0.14~0.19 s |
| 10 | 5 | Y = 3.15, Z = 4.43 | 96.2% | 0.15 s |
| 11–17 | 6 | Y = 3.25~3.85, Z = 4.53~5.13 | 96.8~100% | 0.15~0.18 s |
| 18 | 7 | Y = 3.95, Z = 5.23 | 96.4% | 0.18 s |
| 19–20 | 8 | Y = 4.05~4.15, Z = 5.33~5.43 | 96.9~98.4% | 0.19~0.20 s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, J.; Feng, X.; He, Y.; Shao, L. A Coverage-Based Cooperative Detection Method for CDUAV: Insights from Prediction Error Pipeline Modeling. Drones 2025, 9, 397. https://doi.org/10.3390/drones9060397
Li J, Feng X, He Y, Shao L. A Coverage-Based Cooperative Detection Method for CDUAV: Insights from Prediction Error Pipeline Modeling. Drones. 2025; 9(6):397. https://doi.org/10.3390/drones9060397
Chicago/Turabian StyleLi, Jiong, Xianhai Feng, Yangchao He, and Lei Shao. 2025. "A Coverage-Based Cooperative Detection Method for CDUAV: Insights from Prediction Error Pipeline Modeling" Drones 9, no. 6: 397. https://doi.org/10.3390/drones9060397
APA StyleLi, J., Feng, X., He, Y., & Shao, L. (2025). A Coverage-Based Cooperative Detection Method for CDUAV: Insights from Prediction Error Pipeline Modeling. Drones, 9(6), 397. https://doi.org/10.3390/drones9060397