

Advancing Early Wildfire Detection: Integration of Vision Language Models with Unmanned Aerial Vehicle Remote Sensing for Enhanced Situational Awareness

 , , , , and
, , , , and
Abstract
1. Introduction
- Build a framework for detailed descriptions of forest fires in a structured output
- Evaluate the performance of untrained closed, cloud-based VLMs
- Fine-tune a lightweight open-weight dataset
- Improve VLM-based detection performance on the FIgLib Dataset
1.1. Evolonic
1.1.1. NF4 UAV
1.1.2. Automatic Operations
1.1.3. Software Architecture
1.1.4. Test Flights
1.2. Related Works
1.2.1. Wildfire Detection Methods
1.2.2. VLMs/LLMs for UAVs
2. Materials and Methods
2.1. Wildfire Description
2.2. VLMs
2.2.1. Architectures
2.2.2. State-of-the-Art Models
2.2.3. Prompting and Structured Outputs
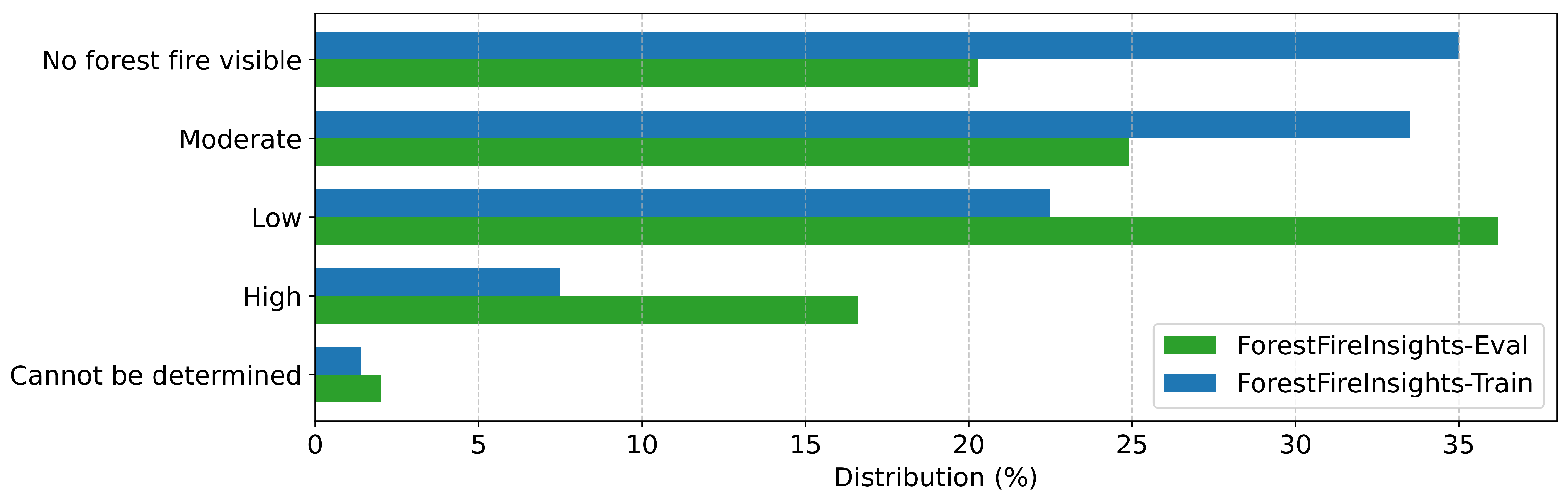
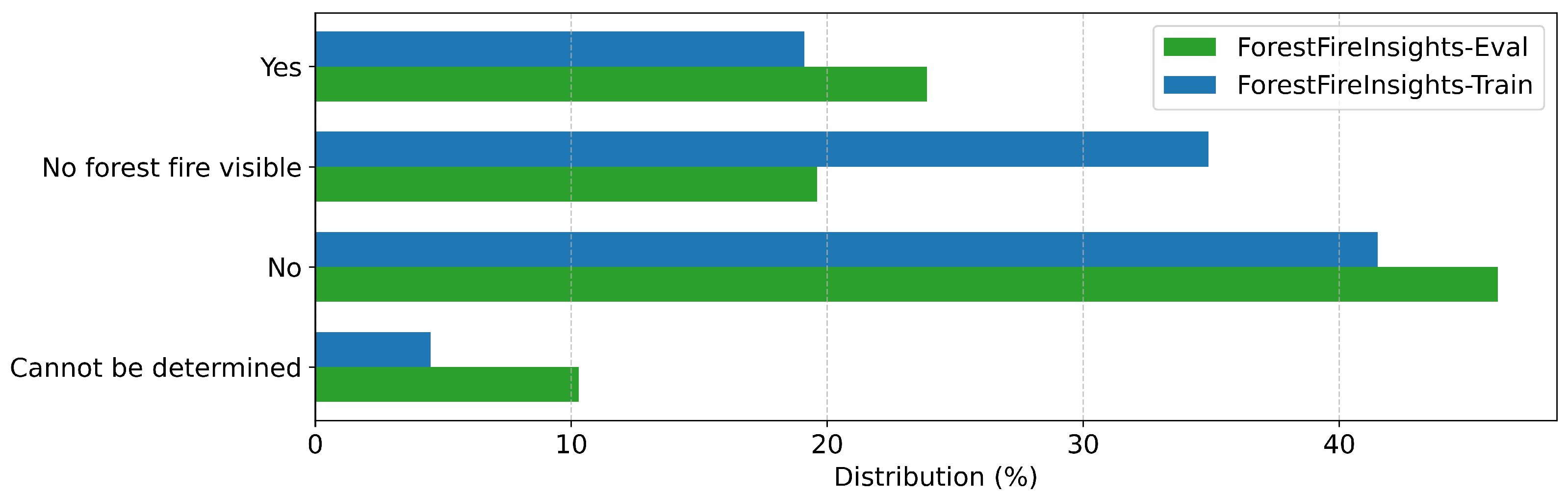
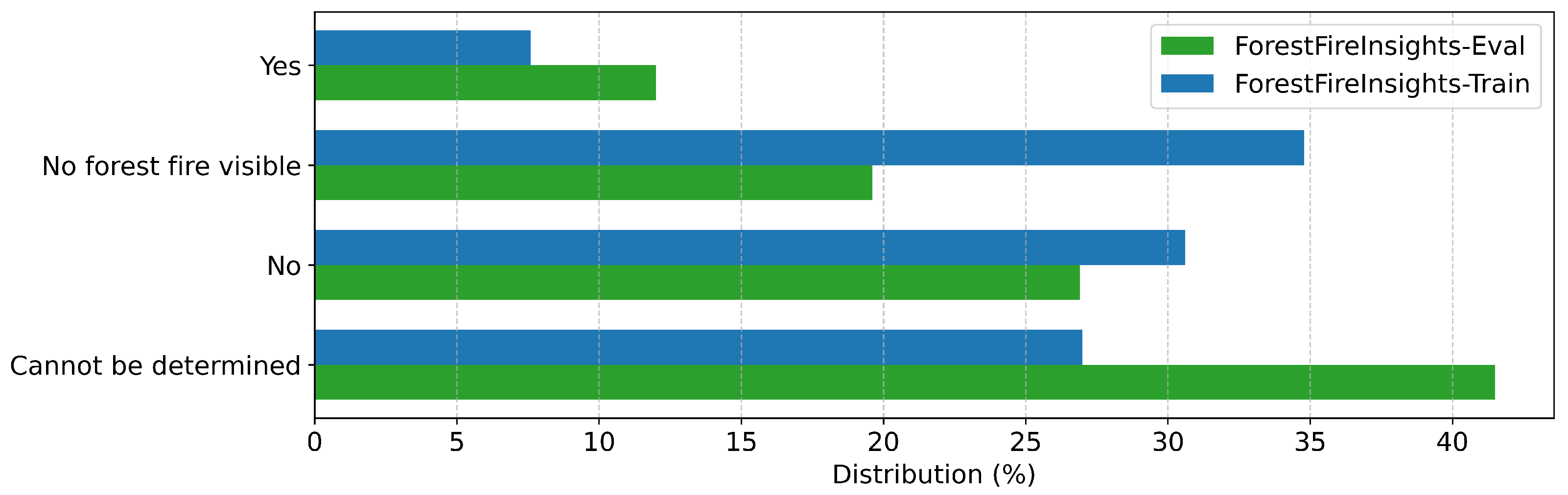
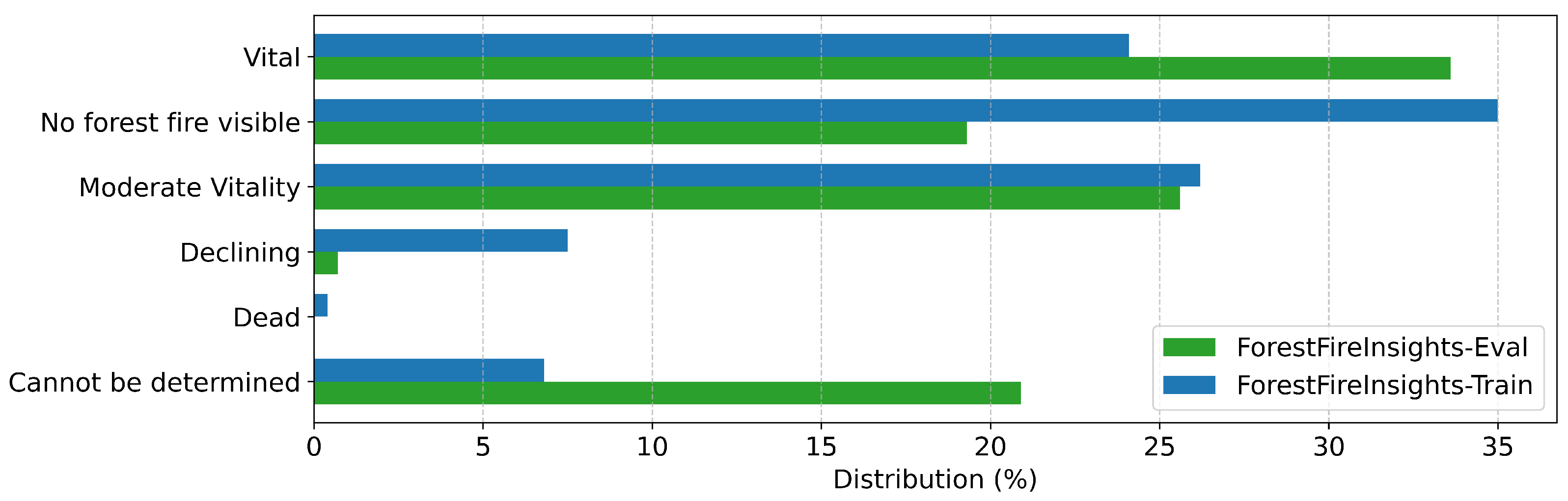
2.2.4. Datasets
2.2.5. Training
2.2.6. Evaluation
2.2.7. Computing and API Checkpoints
3. Results
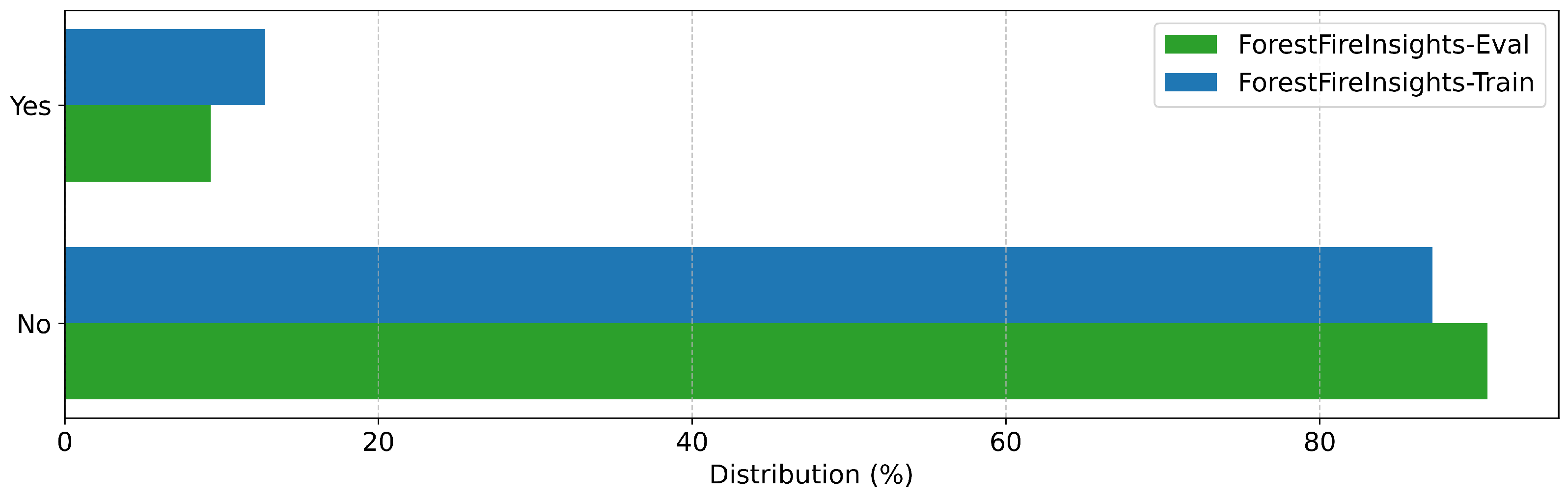
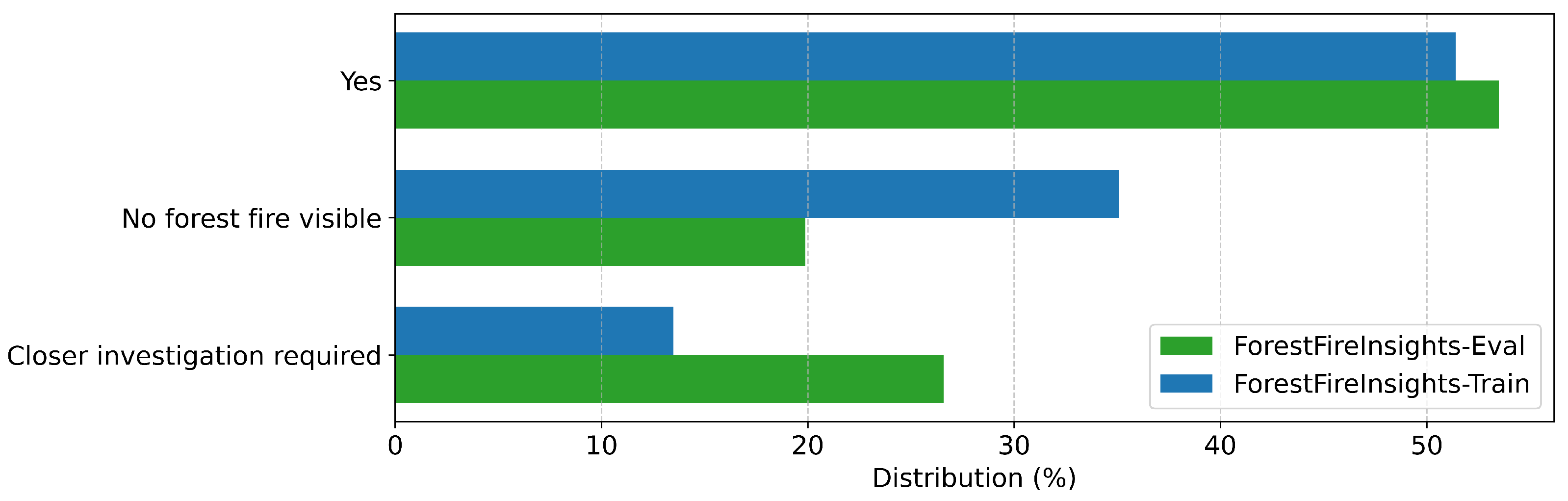
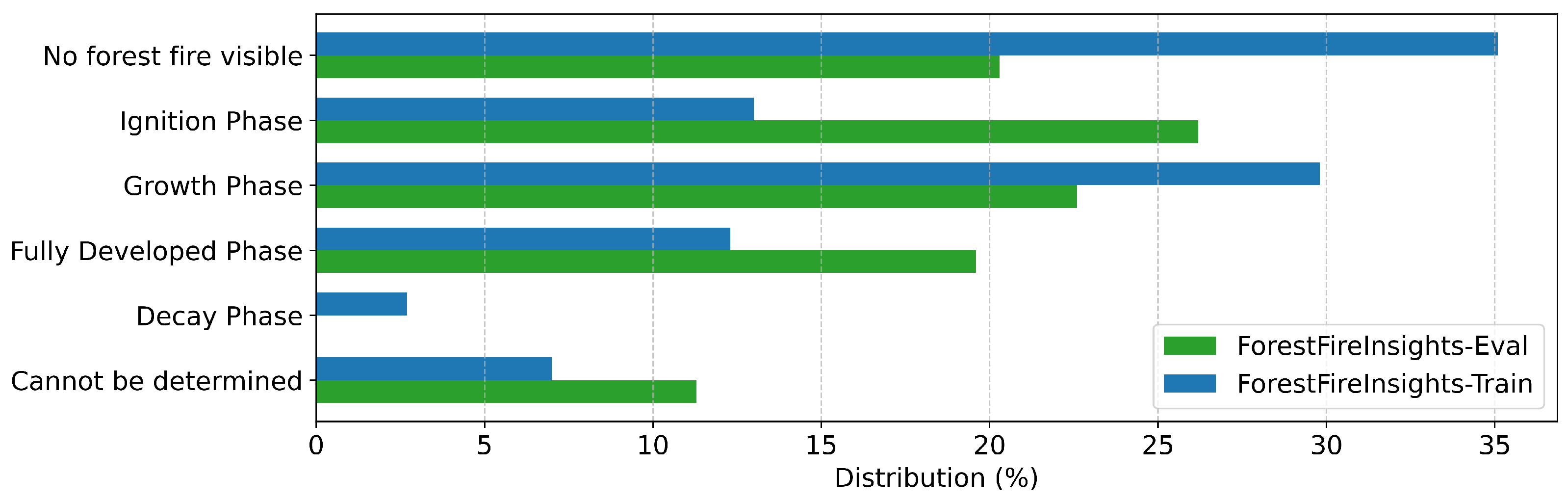
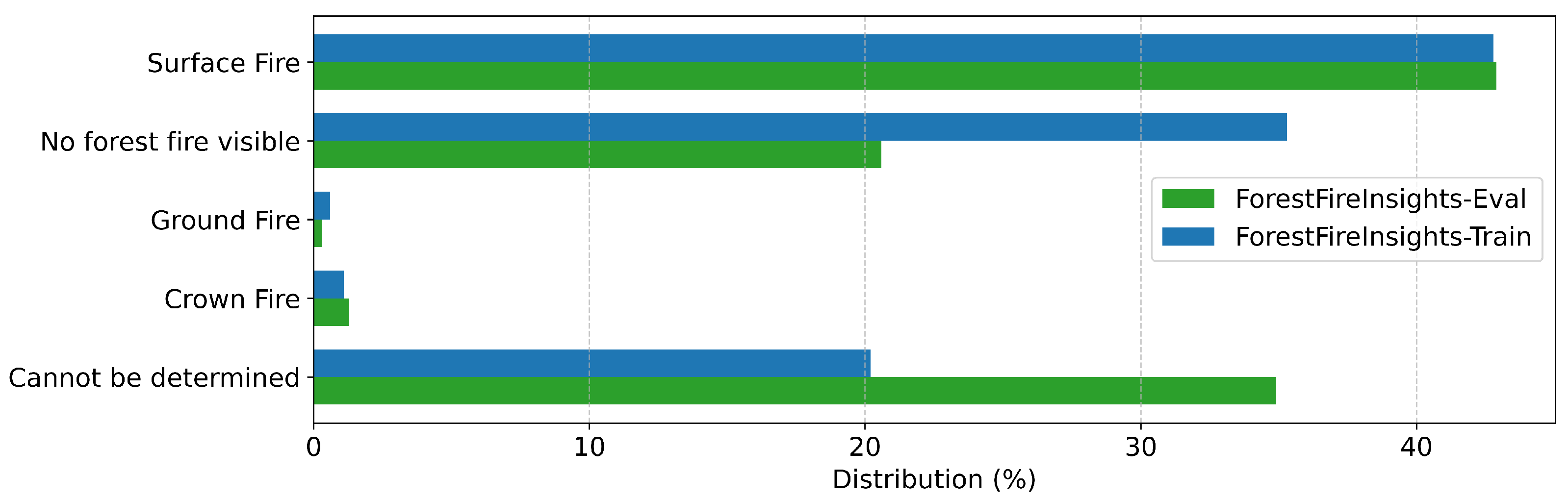
3.1. ForestFireInsights-Eval
3.2. Examples
3.3. FIgLib Test Dataset
3.4. Inference Times
4. Discussion
4.1. Key Takeaways
4.2. Model Performance
4.3. Integration
4.4. Limitations and Future Work
5. Conclusions
- ForestFireVLM-7B and ForestFireVLM-3B, fine-tuned versions of their Qwen2.5-VL counterparts, publicly available for research and practical applications.
- A framework for detailed descriptions of forest fires in a structured format.
- Improving VLM-based detection performance on the FIgLib dataset.
- A dedicated evaluation dataset for structured forest fire descriptions and accompanying code for future research in this domain.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| LLM | Large Language Model |
| LoRA | Low-Rank Adaption |
| LSTM | Long Short-Term Memory |
| OCR | Optical Character Recognition |
| UAV | Unmanned Aerial Vehicle |
| VLM | Vision Language Model |
| VTOL | Vertical Takeoff And Landing |
| WSN | Wireless Sensor Network |
Appendix A



References
- Jones, M.W.; Kelley, D.I.; Burton, C.A.; Di Giuseppe, F.; Barbosa, M.L.F.; Brambleby, E.; Hartley, A.J.; Lombardi, A.; Mataveli, G.; McNorton, J.R.; et al. State of Wildfires 2023–2024. Earth Syst. Sci. Data 2024, 16, 3601–3685. [Google Scholar] [CrossRef]
- Kalabokidis, K.; Xanthopoulos, G.; Moore, P.; Caballero, D.; Kallos, G.; Llorens, J.; Roussou, O.; Vasilakos, C. Decision support system for forest fire protection in the Euro-Mediterranean region. Eur. J. For. Res. 2012, 131, 597–608. [Google Scholar] [CrossRef]
- Bouguettaya, A.; Zarzour, H.; Taberkit, A.M.; Kechida, A. A review on early wildfire detection from unmanned aerial vehicles using deep learning-based computer vision algorithms. Signal Process. 2022, 190, 108309. [Google Scholar] [CrossRef]
- Dewangan, A.; Pande, Y.; Braun, H.W.; Vernon, F.; Perez, I.; Altintas, I.; Cottrell, G.W.; Nguyen, M.H. FIgLib & SmokeyNet: Dataset and Deep Learning Model for Real-Time Wildland Fire Smoke Detection. Remote Sens. 2022, 14, 1007. [Google Scholar] [CrossRef]
- OpenAI; Achiam, J.; Adler, S.; Agarwal, S.; Ahmad, L.; Akkaya, I.; Aleman, F.L.; Almeida, D.; Altenschmidt, J.; Altman, S.; et al. GPT-4 Technical Report. arXiv 2023, arXiv:2303.08774. [Google Scholar]
- Bai, S.; Chen, K.; Liu, X.; Wang, J.; Ge, W.; Song, S.; Dang, K.; Wang, P.; Wang, S.; Tang, J.; et al. Qwen2.5-VL Technical Report. arXiv 2025, arXiv:2502.13923. [Google Scholar]
- Li, Z.; Wu, X.; Du, H.; Nghiem, H.; Shi, G. Benchmark Evaluations, Applications, and Challenges of Large Vision Language Models: A Survey. arXiv 2025, arXiv:2501.02189. [Google Scholar]
- Tao, L.; Zhang, H.; Jing, H.; Liu, Y.; Yan, D.; Wei, G.; Xue, X. Advancements in Vision–Language Models for Remote Sensing: Datasets, Capabilities, and Enhancement Techniques. Remote Sens. 2025, 17, 162. [Google Scholar] [CrossRef]
- Li, X.; Wen, C.; Hu, Y.; Yuan, Z.; Zhu, X.X. Vision-Language Models in Remote Sensing: Current progress and future trends. IEEE Geosci. Remote Sens. Mag. 2024, 12, 32–66. [Google Scholar] [CrossRef]
- Tielin, M.; Chuanguang, Y.; Wenbiao, G.; Zihan, X.; Qinling, Z.; Xiaoou, Z. Analysis of Technical Characteristics of Fixed-Wing VTOL UAV. In Proceedings of the 2017 IEEE International Conference on Unmanned Systems (ICUS), Beijing, China, 27–29 October 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 293–297. [Google Scholar] [CrossRef]
- Schneider, D. Waldbrandfrüherkennung; W. Kohlhammer GmbH: Stuttgart, Germany, 2021. [Google Scholar] [CrossRef]
- Hsieh, R. Alberta Wildfire Detection Challenge: Operational Demonstration of Six Wildfire Detection Systems; Technical Report; TR 2023 n.1; FPInnovations: Thunder Bay, ON, Canada, 2023. [Google Scholar]
- Alkhatib, A.A.A. A Review on Forest Fire Detection Techniques. Int. J. Distrib. Sens. Netw. 2014, 10, 597368. [Google Scholar] [CrossRef]
- Mohapatra, A.; Trinh, T. Early Wildfire Detection Technologies in Practice—A Review. Sustainability 2022, 14, 12270. [Google Scholar] [CrossRef]
- Göttlein, A.; Laniewski, R.; Brinkschulte, C.; Schwichtenberg, H. Praxistest eines Waldbrand-Frühwarnsystems. AFZ der Wald, 31 May 2023. [Google Scholar]
- Blais, M.A.; Akhloufi, M.A. Drone Swarm Coordination Using Reinforcement Learning for Efficient Wildfires Fighting. SN Comput. Sci. 2024, 5, 314. [Google Scholar] [CrossRef]
- Sautenkov, O.; Yaqoot, Y.; Lykov, A.; Mustafa, M.A.; Tadevosyan, G.; Akhmetkazy, A.; Cabrera, M.A.; Martynov, M.; Karaf, S.; Tsetserukou, D. UAV-VLA: Vision-Language-Action System for Large Scale Aerial Mission Generation. arXiv 2025, arXiv:2501.05014. [Google Scholar]
- Sakaino, H. Dynamic Texts from UAV Perspective Natural Images. In Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV) Workshops, Paris, France, 1–6 October 2023; pp. 2070–2081. [Google Scholar]
- Wei, T.; Kulkarni, P. Enhancing the Binary Classification of Wildfire Smoke Through Vision-Language Models. In Proceedings of the 2024 Conference on AI, Science, Engineering, and Technology (AIxSET), Laguna Hills, CA, USA, 30 September–2 October 2024; IEEE: Piscataway, NJ, USA, 2024; pp. 115–118. [Google Scholar] [CrossRef]
- Pronto, L.; Held, A. Einführung in das Feuerverhalten. 2021. Available online: https://www.waldbrand-klima-resilienz.com/_files/ugd/bf6978_f7fbed679d1e438fb88025e159f21ff4.pdf (accessed on 15 March 2025).
- Saxena, S.; Dubey, R.; Yaghoobian, N. A Model for Predicting Ignition Potential of Complex Fuel in. Ph.D. Thesis, Florida State University, Tallahassee, FL, USA, 2023. [Google Scholar] [CrossRef]
- Cimolino, U. Analyse der Einsatzerfahrungen und Entwicklung von Optimierungsmöglichkeiten bei der Bekämpfung von Vegetationsbränden in Deutschland. Ph.D. Thesis, Universität Wuppertal, Wuppertal, Germany, 2014. [Google Scholar]
- Patzelt, S.T. Waldbrandprognose und Waldbrandbekämpfung in Deutschland—Zukunftsorientierte Strategien und Konzepte unter Besonderer Berücksichtigung der Brandbekämpfung aus der Luft. Ph.D. Thesis, Johannes Gutenberg Universität, Mainz, Germany, 2008. [Google Scholar] [CrossRef]
- Deutscher Feuerwehrverband. Anzahl der Feuerwehren; Deutscher Feuerwehrverband: Berlin, Germany, 2023. [Google Scholar]
- Laurençon, H.; Tronchon, L.; Cord, M.; Sanh, V. What matters when building vision-language models? In Proceedings of the 38th Conference on Neural Information Processing Systems (NeurIPS 2024), Vancouver, BC, Canada, 10–15 December 2024. [Google Scholar]
- Duan, H.; Fang, X.; Yang, J.; Zhao, X.; Qiao, Y.; Li, M.; Agarwal, A.; Chen, Z.; Chen, L.; Liu, Y.; et al. VLMEvalKit: An Open-Source Toolkit for Evaluating Large Multi-Modality Models. In Proceedings of the 32nd ACM International Conference on Multimedia, Melbourne, Australia, 28 October–1 November 2024. [Google Scholar]
- Zheng, Y.; Zhang, R.; Zhang, J.; Ye, Y.; Luo, Z.; Feng, Z.; Ma, Y. LlamaFactory: Unified Efficient Fine-Tuning of 100+ Language Models. arXiv 2024, arXiv:2403.13372. [Google Scholar]
- Han, D.; Han, M.; Unsloth Team. Unsloth. 2023. Available online: http://github.com/unslothai/unsloth (accessed on 15 March 2025).
- Chen, Z.; Wang, W.; Cao, Y.; Liu, Y.; Gao, Z.; Cui, E.; Zhu, J.; Ye, S.; Tian, H.; Liu, Z.; et al. Expanding Performance Boundaries of Open-Source Multimodal Models with Model, Data, and Test-Time Scaling. arXiv 2024, arXiv:2412.05271. [Google Scholar]
- Yue, X.; Ni, Y.; Zhang, K.; Zheng, T.; Liu, R.; Zhang, G.; Stevens, S.; Jiang, D.; Ren, W.; Sun, Y.; et al. MMMU: A Massive Multi-discipline Multimodal Understanding and Reasoning Benchmark for Expert AGI. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 16–22 June 2024. [Google Scholar]
- Zhang, Y.F.; Zhang, H.; Tian, H.; Fu, C.; Zhang, S.; Wu, J.; Li, F.; Wang, K.; Wen, Q.; Zhang, Z.; et al. MME-RealWorld: Could Your Multimodal LLM Challenge High-Resolution Real-World Scenarios that are Difficult for Humans? arXiv 2024, arXiv:2408.13257. [Google Scholar]
- Center for Wildfire Research, University of Split. Available online: http://wildfire.fesb.hr/ (accessed on 13 March 2005).
- Krstinić, D.; Stipaničev, D.; Jakovčević, T. Histogram-based smoke segmentation in forest fire detection system. Inf. Technol. Control 2009, 38, 237–244. [Google Scholar]
- Hu, E.J.; Shen, Y.; Wallis, P.; Allen-Zhu, Z.; Li, Y.; Wang, S.; Wang, L.; Chen, W. LoRA: Low-Rank Adaptation of Large Language Models. ICLR 2022, 1, 3. [Google Scholar]
- Dettmers, T.; Pagnoni, A.; Holtzman, A.; Zettlemoyer, L. QLoRA: Efficient Finetuning of Quantized LLMs. Adv. Neural Inf. Process. Syst. 2023, 36, 10088–10115. [Google Scholar]
- Kwon, W.; Li, Z.; Zhuang, S.; Sheng, Y.; Zheng, L.; Yu, C.H.; Gonzalez, J.E.; Zhang, H.; Stoica, I. Efficient Memory Management for Large Language Model Serving with PagedAttention. In Proceedings of the 29th Symposium on Operating Systems Principles, Koblenz, Germany, 23–26 October 2023. [Google Scholar]
- Wang, P.; Bai, S.; Tan, S.; Wang, S.; Fan, Z.; Bai, J.; Chen, K.; Liu, X.; Wang, J.; Ge, W.; et al. Qwen2-VL: Enhancing Vision-Language Model’s Perception of the World at Any Resolution. arXiv 2024, arXiv:2409.12191. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Field | Question | Options |
|---|---|---|
| Smoke | Is smoke from a forest fire visible in the image? | Yes, No |
| Flames | Are flames from a forest fire visible in the image? | Yes, No |
| Uncontrolled | Can you confirm that this is an uncontrolled forest fire? | Yes, Closer investigation required, No forest fire visible |
| Fire State | What is the current state of the forest fire? | Ignition Phase, Growth Phase, Fully Developed Phase, Decay Phase, Cannot be determined, No forest fire visible |
| Fire Type | What type of fire is it? | Ground Fire, Surface Fire, Crown Fire, Cannot be determined, No forest fire visible |
| Fire Intensity | What is the intensity of the fire? | Low, Moderate, High, Cannot be determined, No forest fire visible |
| Fire Size | What is the size of the fire? | Small, Medium, Large, Cannot be determined, No forest fire visible |
| Fire Hotspots | Does the forest fire have multiple hotspots? | Multiple hotspots, One hotspot, Cannot be determined, No forest fire visible |
| Infrastructure Nearby | Is there infrastructure visible near the forest fire? | Yes, No, Cannot be determined, No forest fire visible |
| People Nearby | Are there people visible near the forest fire? | Yes, No, Cannot be determined, No forest fire visible |
| Tree Vitality | Describe the vitality of the trees around the fire. | Vital, Moderate Vitality, Declining, Dead, Cannot be determined, No forest fire visible |
| Dataset | Purpose | Environment Description |
|---|---|---|
| ForestFireInsights-Train | Training (all fields) | Forest fires across Germany and worldwide (UAV and airborne perspectives) |
| ForestFireInsights-Eval | Evaluation (all fields) | Forest fires in Germany and Croatia (UAV and airborne perspectives) |
| FIgLib-Test | Evaluation (detections) | Forest fires in California (tower-based perspectives) |
| Setting | ForestFireVLM-3B | ForestFireVLM-7B |
|---|---|---|
| Learning rate | 0.00005 | 0.0002 |
| Epochs | 2 | 2 |
| Batch Size | 1 | 1 |
| Gradient Accumulation | 8 Steps | 16 Steps |
| GPU | NVIDIA RTX 3090 | NVIDIA A100 80 GB |
| Model | Version or Checkpoint |
|---|---|
| Gemini Pro 1.5 | Version 002 |
| Gemini Flash 2.0 | Version 001 |
| Gemini Flash 2.0 Lite | Version 001 |
| Gemini Pro 2.0 | Experimental 2025-02-05 |
| GPT-4o | 2024-08-06 |
| GPT-4o mini | 2024-07-18 |
| Model | Flames (%) | Smoke (%) | Uncontrolled (%) | Average (%) |
|---|---|---|---|---|
| ForestFireVLM-7B | 98.0 | 95.0 | 77.1 | 90.0 |
| ForestFireVLM-3B | 96.0 | 95.4 | 75.8 | 89.0 |
| Gemini Pro 1.5 | 94.7 | 91.4 | 65.1 | 83.7 |
| Gemini Flash 2.0 | 96.4 | 95.0 | 75.4 | 88.9 |
| Gemini Flash 2.0 Lite | 96.7 | 93.7 | 58.8 | 83.1 |
| Gemini Pro 2.0 | 90.4 | 95.7 | 53.2 | 79.7 |
| GPT-4o | 95.7 | 94.7 | 47.5 | 79.3 |
| GPT-4o mini | 95.0 | 94.7 | 43.9 | 77.9 |
| Qwen2.5-VL-3B | 93.4 | 92.0 | 39.2 | 74.9 |
| Qwen2.5-VL-7B | 92.7 | 79.7 | 32.2 | 68.2 |
| Qwen2.5-VL-72B | 93.7 | 83.4 | 34.6 | 70.5 |
| Model | Fire Hotspots (%) | Fire Intensity (%) | Fire Size (%) | Average (%) |
|---|---|---|---|---|
| ForestFireVLM-7B | 78.1 | 74.1 | 81.1 | 77.7 |
| ForestFireVLM-3B | 82.1 | 69.8 | 80.4 | 77.4 |
| Gemini Pro 1.5 | 69.1 | 48.5 | 51.5 | 56.4 |
| Gemini Flash 2.0 | 58.8 | 34.2 | 51.2 | 48.1 |
| Gemini Flash 2.0 Lite | 79.4 | 47.2 | 67.4 | 64.7 |
| Gemini Pro 2.0 | 76.7 | 63.1 | 74.1 | 71.3 |
| GPT-4o | 26.3 | 21.9 | 21.6 | 23.3 |
| GPT-4o mini | 35.6 | 26.6 | 27.9 | 30.0 |
| Qwen2.5-VL-3B | 55.8 | 37.9 | 38.2 | 44.0 |
| Qwen2.5-VL-7B | 9.0 | 4.3 | 3.7 | 5.6 |
| Qwen2.5-VL-72B | 28.6 | 21.9 | 21.6 | 24.0 |
| Model | Fire State (%) | Fire Type (%) | Average (%) |
|---|---|---|---|
| ForestFireVLM-7B | 64.1 | 71.8 | 67.9 |
| ForestFireVLM-3B | 61.5 | 68.1 | 64.8 |
| Gemini Pro 1.5 | 41.5 | 63.5 | 52.5 |
| Gemini Flash 2.0 | 44.5 | 62.1 | 53.3 |
| Gemini Flash 2.0 Lite | 46.5 | 63.8 | 55.2 |
| Gemini Pro 2.0 | 53.5 | 66.5 | 60.0 |
| GPT-4o | 29.9 | 52.2 | 41.0 |
| GPT-4o mini | 31.9 | 55.8 | 43.9 |
| Qwen2.5-VL-3B | 36.9 | 38.2 | 37.5 |
| Qwen2.5-VL-7B | 12.0 | 34.6 | 23.3 |
| Qwen2.5-VL-72B | 28.9 | 47.8 | 38.4 |
| Model | Infrastructure Nearby (%) | People Nearby (%) | Tree Vitality (%) | Average (%) |
|---|---|---|---|---|
| ForestFireVLM-7B | 74.1 | 66.1 | 62.8 | 67.7 |
| ForestFireVLM-3B | 74.4 | 58.5 | 61.5 | 64.8 |
| Gemini Pro 1.5 | 66.5 | 57.5 | 44.9 | 56.3 |
| Gemini Flash 2.0 | 70.1 | 56.5 | 60.8 | 62.5 |
| Gemini Flash 2.0 Lite | 51.2 | 37.5 | 30.6 | 39.8 |
| Gemini Pro 2.0 | 60.1 | 43.2 | 43.5 | 48.9 |
| GPT-4o | 31.9 | 52.8 | 39.9 | 41.5 |
| GPT-4o mini | 33.2 | 47.5 | 41.9 | 40.9 |
| Qwen2.5-VL-3B | 56.2 | 32.6 | 32.2 | 40.3 |
| Qwen2.5-VL-7B | 51.2 | 44.9 | 20.9 | 39.0 |
| Qwen2.5-VL-72B | 62.5 | 44.2 | 49.2 | 51.9 |
| Model | Detection (%) | Fire Quantitative (%) | Fire Qualitative (%) | Environmental (%) | Overall (%) |
|---|---|---|---|---|---|
| ForestFireVLM-7B | 90.0 | 77.7 | 67.9 | 67.7 | 76.6 |
| ForestFireVLM-3B | 89.0 | 77.4 | 64.8 | 64.8 | 74.8 |
| Gemini Pro 1.5 | 83.7 | 56.4 | 52.5 | 56.3 | 63.1 |
| Gemini Flash 2.0 | 88.9 | 48.1 | 53.3 | 62.5 | 64.1 |
| Gemini Flash 2.0 Lite | 83.1 | 64.7 | 55.2 | 39.8 | 61.2 |
| Gemini Pro 2.0 | 79.7 | 71.3 | 60.0 | 48.9 | 65.5 |
| GPT-4o | 79.3 | 23.3 | 41.0 | 41.5 | 46.8 |
| GPT-4o mini | 77.9 | 30.0 | 43.9 | 40.9 | 48.5 |
| Qwen2.5-VL-3B | 74.9 | 44.0 | 37.5 | 40.3 | 50.2 |
| Qwen2.5-VL-7B | 68.2 | 5.6 | 23.3 | 39.0 | 35.0 |
| Qwen2.5-VL-72B | 70.5 | 24.0 | 38.4 | 51.9 | 46.9 |
| Model | Accuracy (%) | Precision (%) | Recall (%) | Score (%) |
|---|---|---|---|---|
| ForestFireVLM-7B | 78.5 | 98.6 | 57.2 | 72.4 |
| ForestFireVLM-3B | 76.3 | 98.8 | 52.6 | 68.6 |
| Gemini 1.5 Pro | 70.0 | 100.0 | 39.2 | 56.3 |
| Gemini 2.0 Flash | 74.1 | 96.9 | 49.1 | 65.2 |
| Gemini 2.0 Flash Lite | 71.5 | 95.6 | 44.2 | 60.5 |
| Qwen2.5-VL-3B | 70.4 | 91.3 | 44.1 | 59.5 |
| Qwen2.5-VL-7B | 60.3 | 100.0 | 19.5 | 32.7 |
| PaliGemma [19] | 52.1 | 100.0 | 3.0 | 5.7 |
| Phi3 [19] | 52.6 | 100.0 | 4.0 | 7.6 |
| GPT-4o [19] | 74.5 | 95.2 | 50.6 | 66.1 |
| LLaVA 7B [19] | 67.5 | 87.6 | 39.2 | 54.1 |
| Model | Accuracy (%) | Precision (%) | Recall (%) | Score (%) |
|---|---|---|---|---|
| ForestFireVLM-7B | 78.5 | 98.6 | 57.2 | 72.4 |
| ForestFireVLM-3B | 76.3 | 98.8 | 52.6 | 68.6 |
| Human (average of 3) [4] | 78.5 | 93.5 | 74.4 | 82.8 |
| SmokeyNet (1 frame) [4] | 82.5 | 88.6 | 75.2 | 81.3 |
| SmokeyNet (3 frames) [4] | 83.6 | 90.9 | 76.1 | 82.8 |
| LLaVA (Horizon Tiling) [19] | 81.4 | 86.5 | 73.7 | 79.6 |
| GPU | ForestFireVLM-3B (FP16) | ForestFireVLM-7B (FP8) | ForestFireVLM-7B (FP16) |
|---|---|---|---|
| Jetson Orin NX | 23.0 s (5.0/18.1 s) | 34.1 s (7.2/26.9 s) | - |
| RTX 4060 Ti | 3.2 s (0.5/2.7 s) | 4.1 s (0.6/3.5 s) | - |
| RTX 4090 | 1.1 s (0.1/1.0 s) | 1.5 s (0.2/1.3 s) | 2.0 s (0.2/1.8 s) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Seidel, L.; Gehringer, S.; Raczok, T.; Ivens, S.-N.; Eckardt, B.; Maerz, M. Advancing Early Wildfire Detection: Integration of Vision Language Models with Unmanned Aerial Vehicle Remote Sensing for Enhanced Situational Awareness. Drones 2025, 9, 347. https://doi.org/10.3390/drones9050347
Seidel L, Gehringer S, Raczok T, Ivens S-N, Eckardt B, Maerz M. Advancing Early Wildfire Detection: Integration of Vision Language Models with Unmanned Aerial Vehicle Remote Sensing for Enhanced Situational Awareness. Drones. 2025; 9(5):347. https://doi.org/10.3390/drones9050347
Chicago/Turabian StyleSeidel, Leon, Simon Gehringer, Tobias Raczok, Sven-Nicolas Ivens, Bernd Eckardt, and Martin Maerz. 2025. "Advancing Early Wildfire Detection: Integration of Vision Language Models with Unmanned Aerial Vehicle Remote Sensing for Enhanced Situational Awareness" Drones 9, no. 5: 347. https://doi.org/10.3390/drones9050347
APA StyleSeidel, L., Gehringer, S., Raczok, T., Ivens, S.-N., Eckardt, B., & Maerz, M. (2025). Advancing Early Wildfire Detection: Integration of Vision Language Models with Unmanned Aerial Vehicle Remote Sensing for Enhanced Situational Awareness. Drones, 9(5), 347. https://doi.org/10.3390/drones9050347