


Age of Information-Inspired Data Collection and Secure Upload Assisted by the Unmanned Aerial Vehicle and Reconfigurable Intelligent Surface in Maritime Wireless Sensor Networks




Abstract
1. Introduction
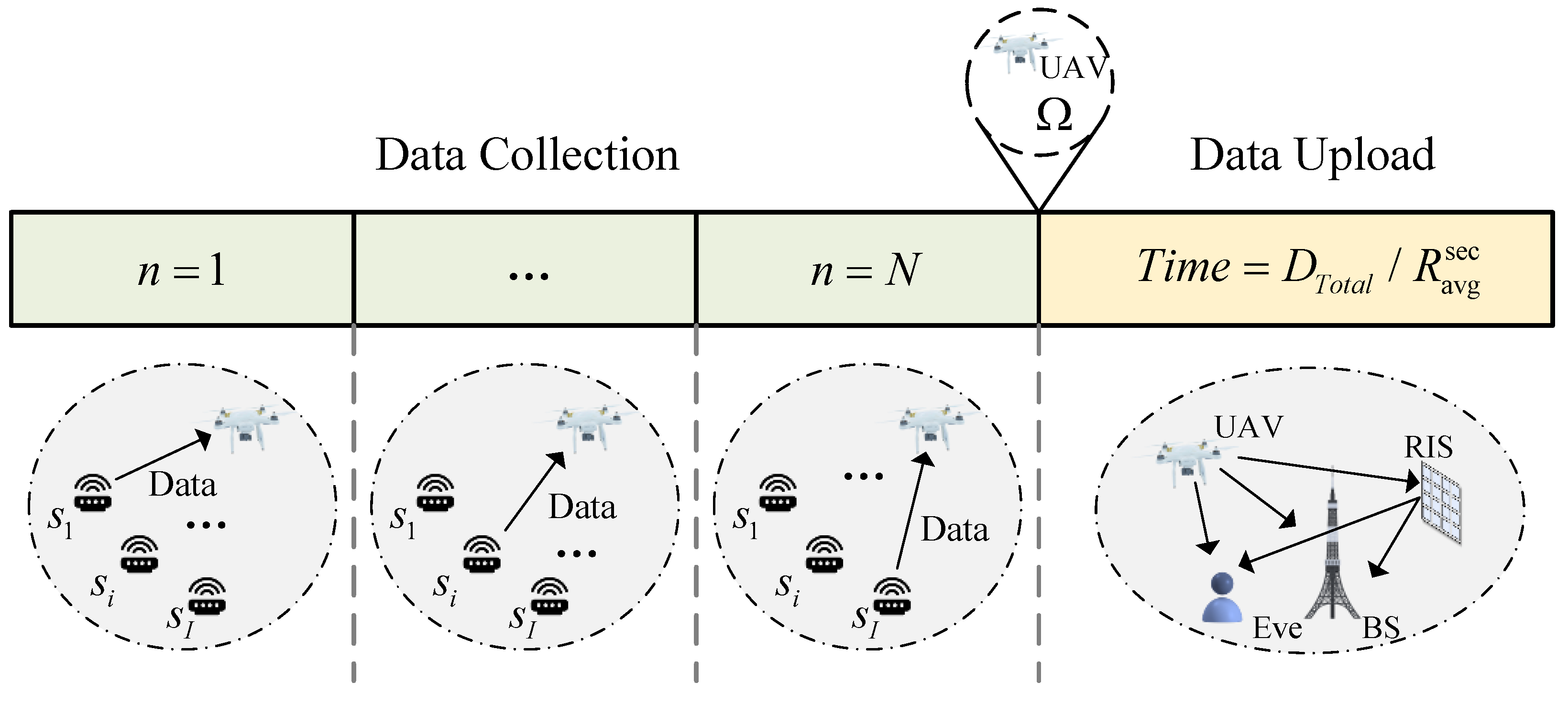
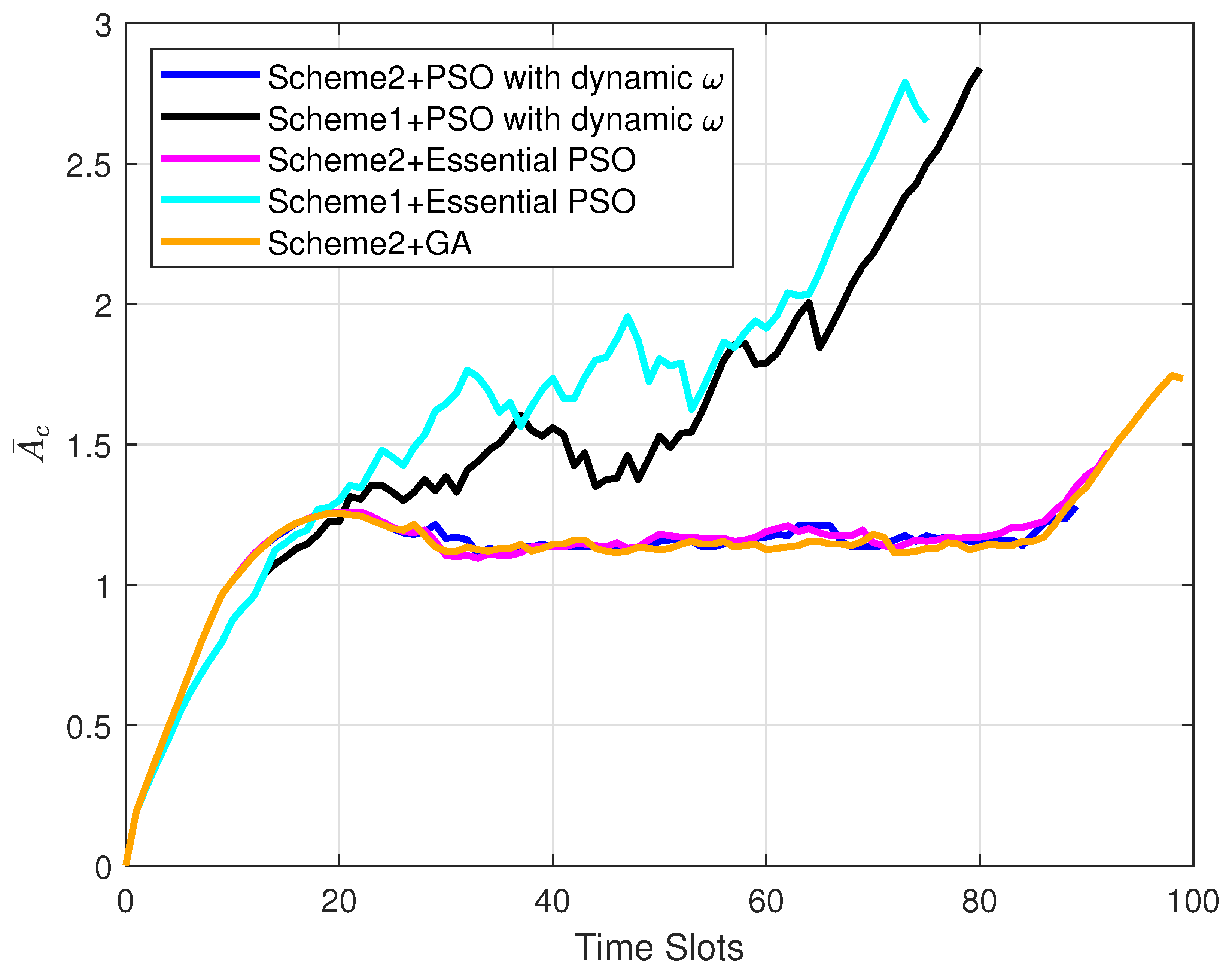
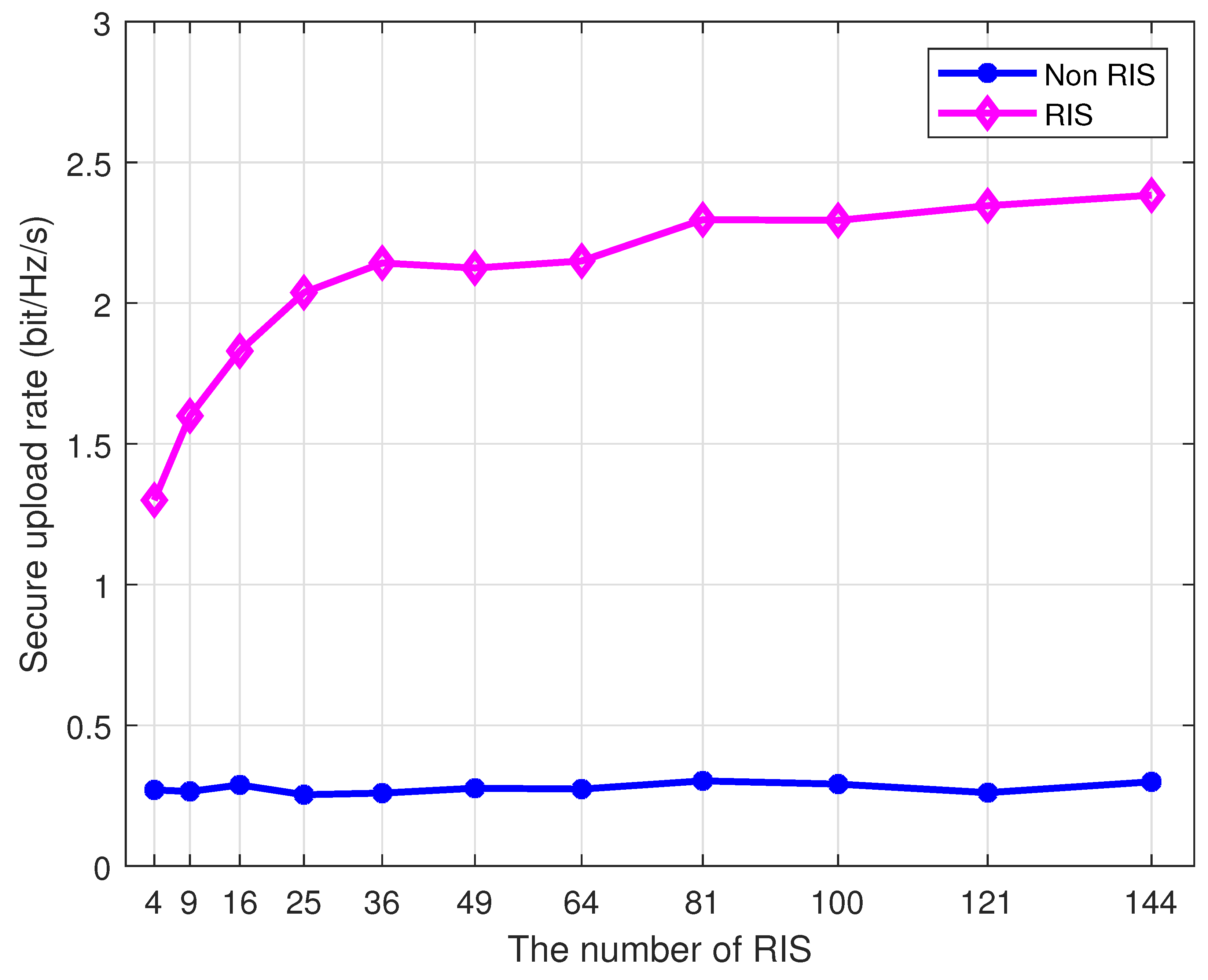
- For the proposed secure transmission system of the UAV and RIS-assisted wireless sensing information collection, we divide the collection process into a data collection period and a data upload period according to the time sequence, and we design a sensor scheduling principle (Scheme 2) that maximizes the difference in the AoI of adjacent time slots, with the goal of minimizing the average AoI of the sensor network. The simulation analysis provea the superiority of Scheme 2. Meanwhile, the system AoI is also minimized by optimizing the UAV flight trajectory and the reflection coefficient of the RIS to maximize the transmission rate.
- In the data collection period, we adopt the realistic two-ray path loss channel instead of the commonly used air-to-ground LoS channel and optimize the UAV trajectory using the PSO algorithm with dynamic weights. In the data upload period, an auxiliary variable is introduced, and an iterative optimization method is developed to optimize the RIS reflection coefficients via relaxing the rank one constraints and Gaussian randomization.
- Scheduling the sensor with the smallest AoI of itself in the current time slot (Scheme 1) and the GA are introduced as comparison solutions. The simulation results demonstrate that the average AoI of the system is minimum using PSO with dynamic weights in conjunction with Scheme 2. More specifically, the average system AoI with the RIS optimization is reduced by nearly 10 s compared to the non-RIS scheme.
2. System Model and Problem Formulation
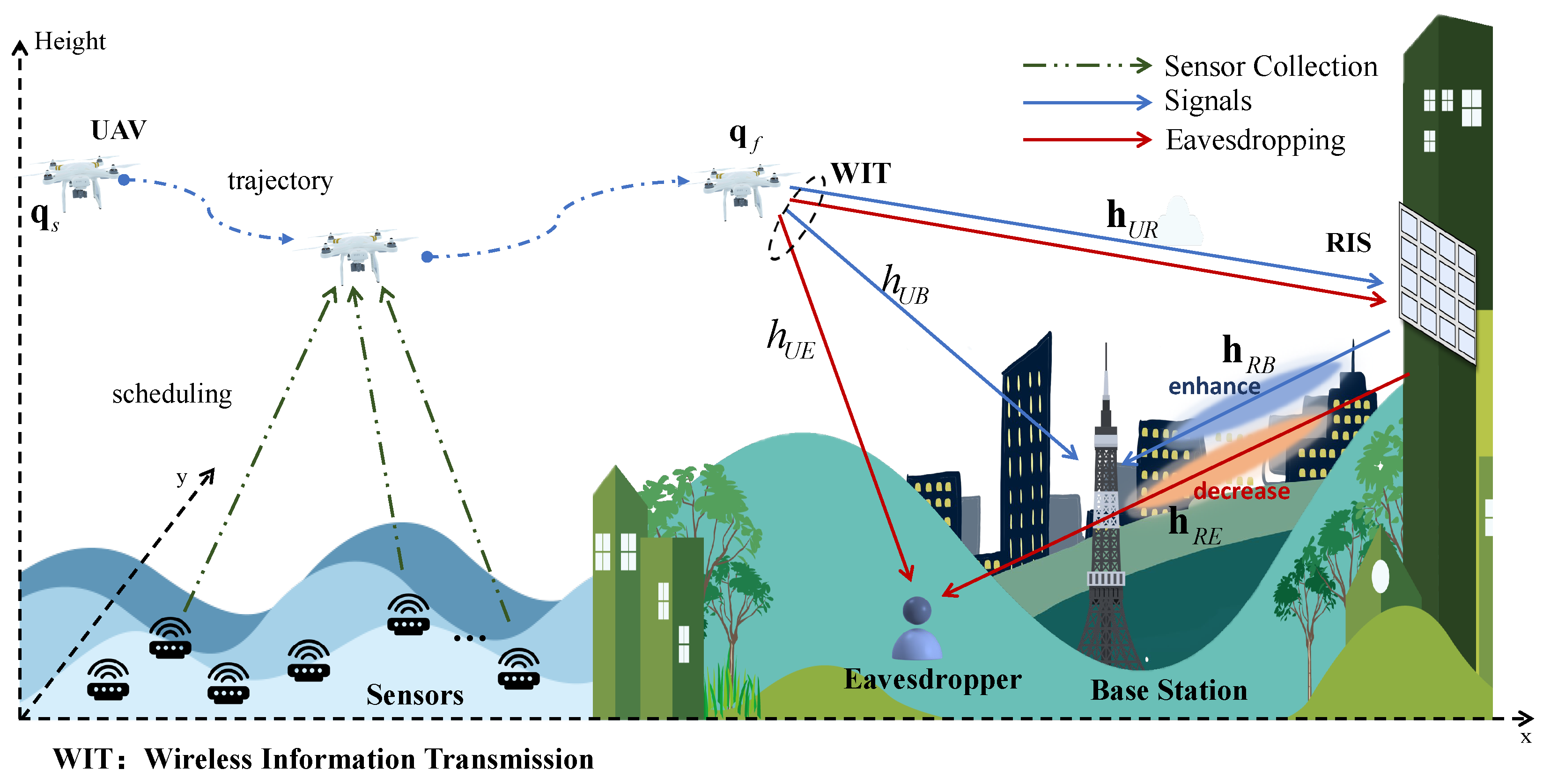
2.1. Network Model
2.2. Channel Model
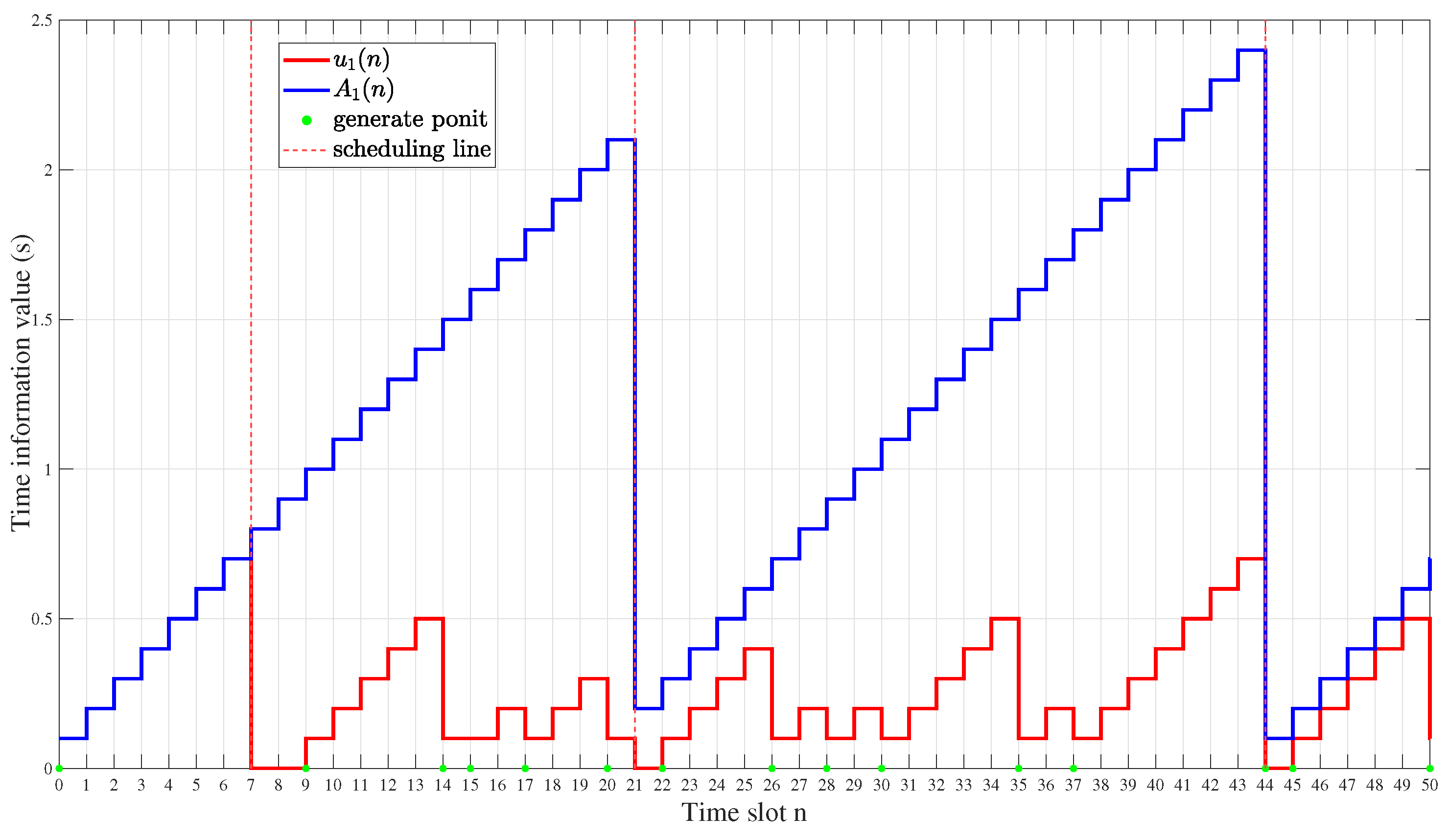
2.3. AoI Model
2.4. Problem Formulation
3. AoI Minimization Optimization for Two Periods of Data Collection and Data Upload
3.1. General Description of Data Collection and Data Upload
3.2. Data Collection Period
- Scheme 2: Scheduling the sensor with the largest AoI difference between the current time slot and the previous neighboring time slot, which has significant efficacy for the AoI reduction in a multiquantity sensor network.
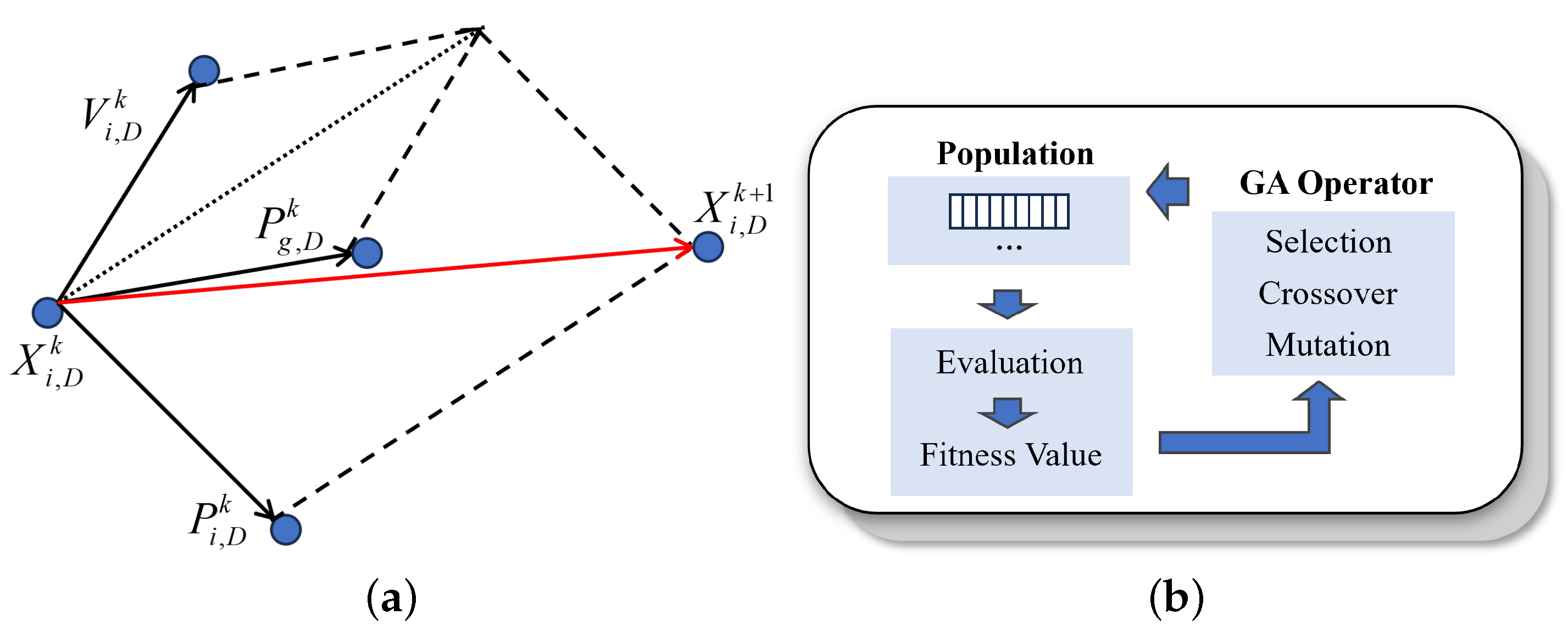
3.2.1. PSO with Dynamic Inertial Weights
3.2.2. GA
- Selection: According to a certain rule or method, a strong individual is selected from the current population as the parent of the next generation based on the fitness of the individual. In this paper, the emperor scheme is introduced, i.e., the best-performing individual (“the emperor”) is selected in each iteration, and its chromosome is crossed with half of the individuals in the whole population, thus increasing the proportion of the emperor’s chromosome in the whole population.
- Crossover: Randomly matching selected individuals in the population to exchange some of the chromosomes between them with a crossover probability .
- Mutation: Randomly altering individual genes to maintain population diversity and prevent premature convergence. In this paper, we adopt the real-valued mutation method, which utilizes the set mutation probability to determine whether it mutates or not. If it is judged as a mutated individual, the corresponding gene value is replaced with a random value.
| Algorithm 1 PSO Scheme 2 for Data Collection Period |
|
3.3. Data Upload Period
| Algorithm 2 Iterative Optimization for RIS Phase Shift |
|
| Algorithm 3 Overall Algorithm for Two Periods |
|
4. Simulation Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Xie, J.; Fu, Q.; Jia, R.; Lin, F.; Li, M.; Zheng, Z. Optimal Energy and Delay Tradeoff in UAV-Enabled Wireless Sensor Networks. Drones 2023, 7, 368. [Google Scholar] [CrossRef]
- Lu, Y.; Hong, Y.; Luo, C.; Li, D.; Chen, Z. Optimization Algorithms for UAV-and-MUV Cooperative Data Collection in Wireless Sensor Networks. Drones 2023, 7, 408. [Google Scholar] [CrossRef]
- Amodu, O.A.; Nordin, R.; Jarray, C.; Bukar, U.A.; Raja Mahmood, R.A.; Othman, M. A Survey on the Design Aspects and Opportunities in Age-Aware UAV-Aided Data Collection for Sensor Networks and Internet of Things Applications. Drones 2023, 7, 260. [Google Scholar] [CrossRef]
- Wei, Z.; Zhu, M.; Zhang, N.; Wang, L.; Zou, Y.; Meng, Z.; Wu, H.; Feng, Z. UAV-Assisted Data Collection for Internet of Things: A Survey. IEEE Internet Things J. 2022, 9, 15460–15483. [Google Scholar] [CrossRef]
- Chen, W.; Zhao, S.; Zhang, R.; Chen, Y.; Yang, L. UAV-Assisted Data Collection with Nonorthogonal Multiple Access. IEEE Internet Things J. 2021, 8, 501–511. [Google Scholar] [CrossRef]
- He, Y.; Wang, D.; Huang, F.; Zhang, R.; Gu, X.; Pan, J. A V2I and V2V Collaboration Framework to Support Emergency Communications in ABS-Aided Internet of Vehicles. IEEE Trans. Green Commun. Netw. 2023, 7, 2038–2051. [Google Scholar] [CrossRef]
- He, Y.; Wang, D.; Huang, F.; Zhang, R.; Min, L. Aerial-Ground Integrated Vehicular Networks: A UAV-Vehicle Collaboration Perspective. IEEE Trans. Intell. Transp. Syst. 2024, 25, 5154–5169. [Google Scholar] [CrossRef]
- Shen, L.; Wang, N.; Zhu, Z.; Xu, W.; Li, Y.; Mu, X.; Cai, L. UAV-Enabled Data Collection over Clustered Machine-Type Communication Networks: AEM Modeling and Trajectory Planning. IEEE Trans. Veh. Technol. 2022, 71, 10016–10032. [Google Scholar] [CrossRef]
- Lyu, L.; Chu, Z.; Lin, B.; Dai, Y.; Cheng, N. Fast Trajectory Planning for UAV-Enabled Maritime IoT Systems: A Fermat-Point Based Approach. IEEE Wirel. Commun. Lett. 2022, 11, 328–332. [Google Scholar] [CrossRef]
- Fan, X.; Liu, M.; Chen, Y.; Sun, S.; Li, Z.; Guo, X. RIS-Assisted UAV for Fresh Data Collection in 3D Urban Environments: A Deep Reinforcement Learning Approach. IEEE Trans. Veh. Technol. 2023, 72, 632–647. [Google Scholar] [CrossRef]
- Wang, Y.; Chen, M.; Pan, C.; Wang, K.; Pan, Y. Joint Optimization of UAV Trajectory and Sensor Uploading Powers for UAV-Assisted Data Collection in Wireless Sensor Networks. IEEE Internet Things J. 2022, 9, 11214–11226. [Google Scholar] [CrossRef]
- Nie, G.; Ma, T.; Zhang, Z.; Tian, H.; Mumtaz, S.; Ding, Z. Coarse Closed-Loop Trajectory Design of Multiple UAVs for Parallel Data Collection. IEEE Trans. Veh. Technol. 2023, 72, 4026–4039. [Google Scholar] [CrossRef]
- Lu, W.; Mo, Y.; Feng, Y.; Gao, Y.; Zhao, N.; Wu, Y.; Nallanathan, A. Secure Transmission for Multi-UAV-Assisted Mobile Edge Computing Based on Reinforcement Learning. IEEE Trans. Netw. Sci. Eng. 2023, 10, 1270–1282. [Google Scholar] [CrossRef]
- Gu, X.; Zhang, G.; Gu, J. Offloading Optimization for Energy-Minimization Secure UAV-Edge-Computing Systems. In Proceedings of the 2021 IEEE Wireless Communications and Networking Conference (WCNC), Nanjing, China, 29 March–1 April 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Chen, X.; Zhao, N.; Chang, Z.; Hämäläinen, T.; Wang, X. UAV-Aided Secure Short-Packet Data Collection and Transmission. IEEE Trans. Commun. 2023, 71, 2475–2486. [Google Scholar] [CrossRef]
- Wu, Q.; Liu, L.; Zhang, R. Fundamental Trade-offs in Communication and Trajectory Design for UAV-Enabled Wireless Network. IEEE Wirel. Commun. 2019, 26, 36–44. [Google Scholar] [CrossRef]
- Tang, W.; Chen, M.Z.; Chen, X.; Dai, J.Y.; Han, Y.; Di Renzo, M.; Zeng, Y.; Jin, S.; Cheng, Q.; Cui, T.J. Wireless Communications with Reconfigurable Intelligent Surface: Path Loss Modeling and Experimental Measurement. IEEE Trans. Wirel. Commun. 2021, 20, 421–439. [Google Scholar] [CrossRef]
- Liu, J.; Zhang, H. Height-Fixed UAV Enabled Energy-Efficient Data Collection in RIS-Aided Wireless Sensor Networks. IEEE Trans. Wirel. Commun. 2023, 22, 7452–7463. [Google Scholar] [CrossRef]
- Tyrovolas, D.; Mekikis, P.-V.; Tegos, S.A.; Diamantoulakis, P.D.; Liaskos, C.K.; Karagiannidis, G.K. Energy-Aware Design of UAV-Mounted RIS Networks for IoT Data Collection. IEEE Trans. Commun. 2023, 71, 1168–1178. [Google Scholar] [CrossRef]
- Wang, N.; Wang, P.; Alipour-Fanid, A.; Jiao, L.; Zeng, K. Physical-Layer Security of 5G Wireless Networks for IoT: Challenges and Opportunities. IEEE Internet Things J. 2019, 6, 8169–8181. [Google Scholar] [CrossRef]
- Wang, D.; Wang, Z.; Yu, K.; Wei, Z.; Zhao, H.; Al-Dhahir, N.; Guizani, M.; Leung, V.C.M. Active Aerial Reconfigurable Intelligent Surface Assisted Secure Communications: Integrating Sensing and Positioning. IEEE J. Sel. Areas Commun. 2024. [Google Scholar] [CrossRef]
- Sun, X.; Yang, W.; Cai, Y. Secure Communication in NOMA-Assisted Millimeter-Wave SWIPT UAV Networks. IEEE Internet Things J. 2020, 7, 1884–1897. [Google Scholar] [CrossRef]
- Yin, Z.; Cheng, N.; Song, Y.; Hui, Y.; Li, Y.; Luan, T.H.; Yu, S. UAV-Assisted Secure Uplink Communications in Satellite-Supported IoT: Secrecy Fairness Approach. IEEE Internet Things J. 2024, 11, 6904–6915. [Google Scholar] [CrossRef]
- Sun, M.; Xu, X.; Qin, X.; Zhang, P. AoI-Energy-Aware UAV-Assisted Data Collection for IoT Networks: A Deep Reinforcement Learning Method. IEEE Internet Things J. 2021, 8, 17275–17289. [Google Scholar] [CrossRef]
- Liu, L.; Xiong, K.; Cao, J.; Lu, Y.; Fan, P.; Letaief, K.B. Average AoI Minimization in UAV-Assisted Data Collection with RF Wireless Power Transfer: A Deep Reinforcement Learning Scheme. IEEE Internet Things J. 2022, 9, 5216–5228. [Google Scholar] [CrossRef]
- Liu, J.; Wang, X.; Bai, B.; Dai, H. Age-optimal trajectory planning for UAV-assisted data collection. In Proceedings of the IEEE INFOCOM 2018—IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS), Honolulu, HI, USA, 15–19 April 2018; pp. 553–558. [Google Scholar] [CrossRef]
- Qi, W.; Yang, C.; Song, Q.; Guan, Y.; Guo, L.; Jamalipour, A. Minimizing Age of Information for Hybrid UAV-RIS-Assisted Vehicular Networks. IEEE Internet Things J. 2024, 11, 17886–17895. [Google Scholar] [CrossRef]
- Liu, J.; Tong, P.; Wang, X.; Bai, B.; Dai, H. UAV-Aided Data Collection for Information Freshness in Wireless Sensor Networks. IEEE Trans. Wirel. Commun. 2021, 20, 2368–2382. [Google Scholar] [CrossRef]
- Li, Q.; Hong, M.; Wai, H.-T.; Liu, Y.-F.; Ma, W.-K.; Luo, Z.-Q. Transmit solutions for MIMO wiretap channels using alternating optimization. IEEE J. Sel. Areas Commun. 2023, 31, 1714–1727. [Google Scholar] [CrossRef]
- Zhou, J.; Hou, W.; Mao, Y.; Tellambura, C. Artificial noise assisted secure transmission for uplink MIMO rate splitting healthcare systems. IEEE Commun. Lett. 2023, 27, 3176–3180. [Google Scholar] [CrossRef]
- Zhao, H.; Kong, Z.; Shi, S.; Huang, H.; Ni, Y.; Gui, G.; Gacanin, H.; Sari, H.; Adachi, F. Air Reconfigurable Intelligent Surface Enhanced Multiuser NOMA System. IEEE Internet Things J. 2024, 11, 29–39. [Google Scholar] [CrossRef]
- Chen, P.; Chen, Z.; Zheng, B.; Wang, X. Efficient DOA Estimation Method for Reconfigurable Intelligent Surfaces Aided UAV Swarm. IEEE Trans. Signal Process. 2022, 70, 743–755. [Google Scholar] [CrossRef]
- Zhang, J.; Liang, F.; Li, B.; Yang, Z.; Wu, Y.; Zhu, H. Placement optimization of caching UAV-assisted mobile relay maritime communication. China Commun. 2020, 17, 209–219. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Fixed transmitter power, , | 23 dBm |
| Noise variance, | dBm |
| Noise variance, , | dBm |
| Maximum flight time, T | 20 s |
| Data collection bandwidth, | 1 MHz |
| Data upload bandwidth, | 5 MHz |
| UAV flight altitude, | 100 m |
| Sensing packet size, | Mbps |
| Maximum velocity of UAV, | 20 m/s |
| Radius of , | 1 m |
| The number of RIS elements, | 64 |
| Learning factors, , | 1.5 |
| The maximum inertia weights, | 0.8 |
| The minimum inertia weights, | 0.4 |
| Crossover and mutation probability, | 0.7, 0.2 |
| Number of PSO swarms, | 100 |
| Probability of randomly generating data, p | 0.2 |
| Scheme 2 PSO with Dynamic + RIS | Scheme 2 Essential PSO + Non-RIS | Scheme 1 Essential PSO + Non-RIS | |
|---|---|---|---|
| 1.24 s | 1.46 s | 2.65 s | |
| 1.24 s | 9.75 s | 9.75 s | |
| 2.48 s | 11.21 s | 12.4 s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, D.; Yuan, L.; Pang, L.; Xu, Q.; He, Y. Age of Information-Inspired Data Collection and Secure Upload Assisted by the Unmanned Aerial Vehicle and Reconfigurable Intelligent Surface in Maritime Wireless Sensor Networks. Drones 2024, 8, 267. https://doi.org/10.3390/drones8060267
Wang D, Yuan L, Pang L, Xu Q, He Y. Age of Information-Inspired Data Collection and Secure Upload Assisted by the Unmanned Aerial Vehicle and Reconfigurable Intelligent Surface in Maritime Wireless Sensor Networks. Drones. 2024; 8(6):267. https://doi.org/10.3390/drones8060267
Chicago/Turabian StyleWang, Dawei, Linfeng Yuan, Linna Pang, Qian Xu, and Yixin He. 2024. "Age of Information-Inspired Data Collection and Secure Upload Assisted by the Unmanned Aerial Vehicle and Reconfigurable Intelligent Surface in Maritime Wireless Sensor Networks" Drones 8, no. 6: 267. https://doi.org/10.3390/drones8060267
APA StyleWang, D., Yuan, L., Pang, L., Xu, Q., & He, Y. (2024). Age of Information-Inspired Data Collection and Secure Upload Assisted by the Unmanned Aerial Vehicle and Reconfigurable Intelligent Surface in Maritime Wireless Sensor Networks. Drones, 8(6), 267. https://doi.org/10.3390/drones8060267