
An Operational Capacity Assessment Method for an Urban Low-Altitude Unmanned Aerial Vehicle Logistics Route Network


 ,
, 

Abstract
:1. Introduction
2. Related Works
- (1)
- Application of UAVs in logistics
- (2)
- Operation and management of UAV logistics
- (3)
- Airspace capacity assessment
3. Methodologies
3.1. Problem Description
- Logistics UAVs operate within the specified communities; cross-regional delivery is not allowed, and the public delivery center is at the boundary of each service community and can provide services for multiple community logistics UAVs;
- All logistics UAVs must operate at a steady speed along a predetermined path in accordance with the delivery plan, keeping a specific safety interval and not allowing any route changes in the middle of the flight. They are all identical in kind and consistent in their performance parameter settings;
- Logistics UAVs are allowed to land or skip through any public distribution center or delivery station, and the public delivery center or delivery station can only provide service for one logistics UAV at the same time;
- Logistics UAVs are required to complete takeoff and landing within the specified time, beyond which the delivery plan cannot be executed;
- Ignoring the effect of weather on logistics UAV operations.
3.2. Modeling
3.2.1. Objective Functions
- (1)
- The First Objective
- (2)
- The Second Objective
- (1)
- Safety Impedance
- (2)
- Noise Impedance
- (3)
- Cost Impedance
3.2.2. Constraint Conditions
- (1)
- Takeoff
- (2)
- Landing
- (3)
- Fly Across
- (4)
- Safety Interval
- (5)
- Fly Across Time
- (6)
- Load Limitation
- (7)
- Flight Speed Limitation
- (8)
- Flight Distance Limitation
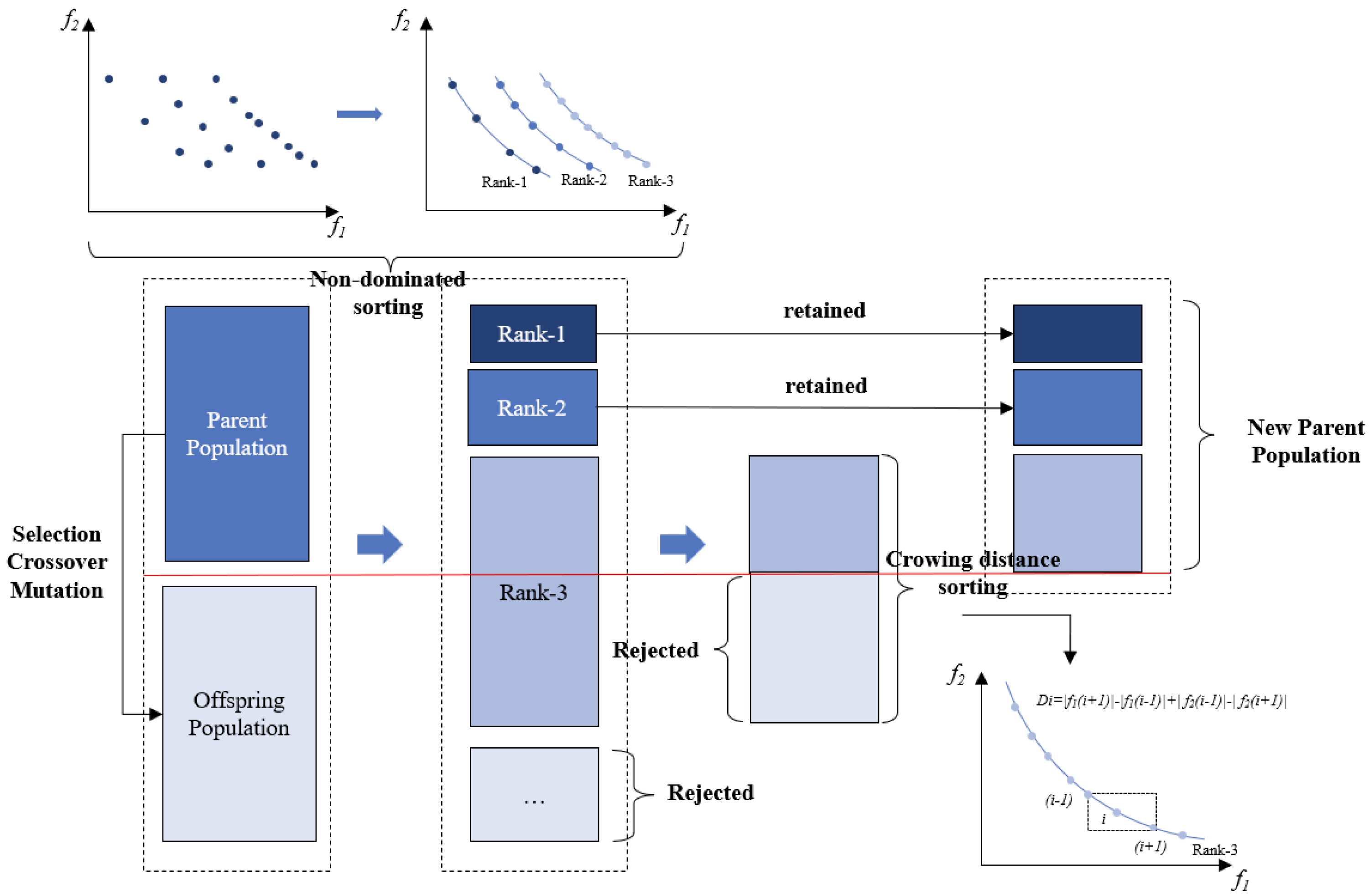
4. Algorithm
NGSA-II Algorithm Genetic Mechanism Design
- (1)
- Coding
- (2)
- Genetic Operations
| Algorithm 1. NGSA-II Algorithm solving process [37] |
| Input Output // Generating an initial population with population size While // Calculating the objective function // Non-dominance sorting // Sorting by crowding distance // Retaining the top individuals in While // Select two individuals from the parent population // Calculating adaptive crossover probabilities // Calculating adaptive mutation probabilities End While Return |
5. Analysis
5.1. Parameters Setting
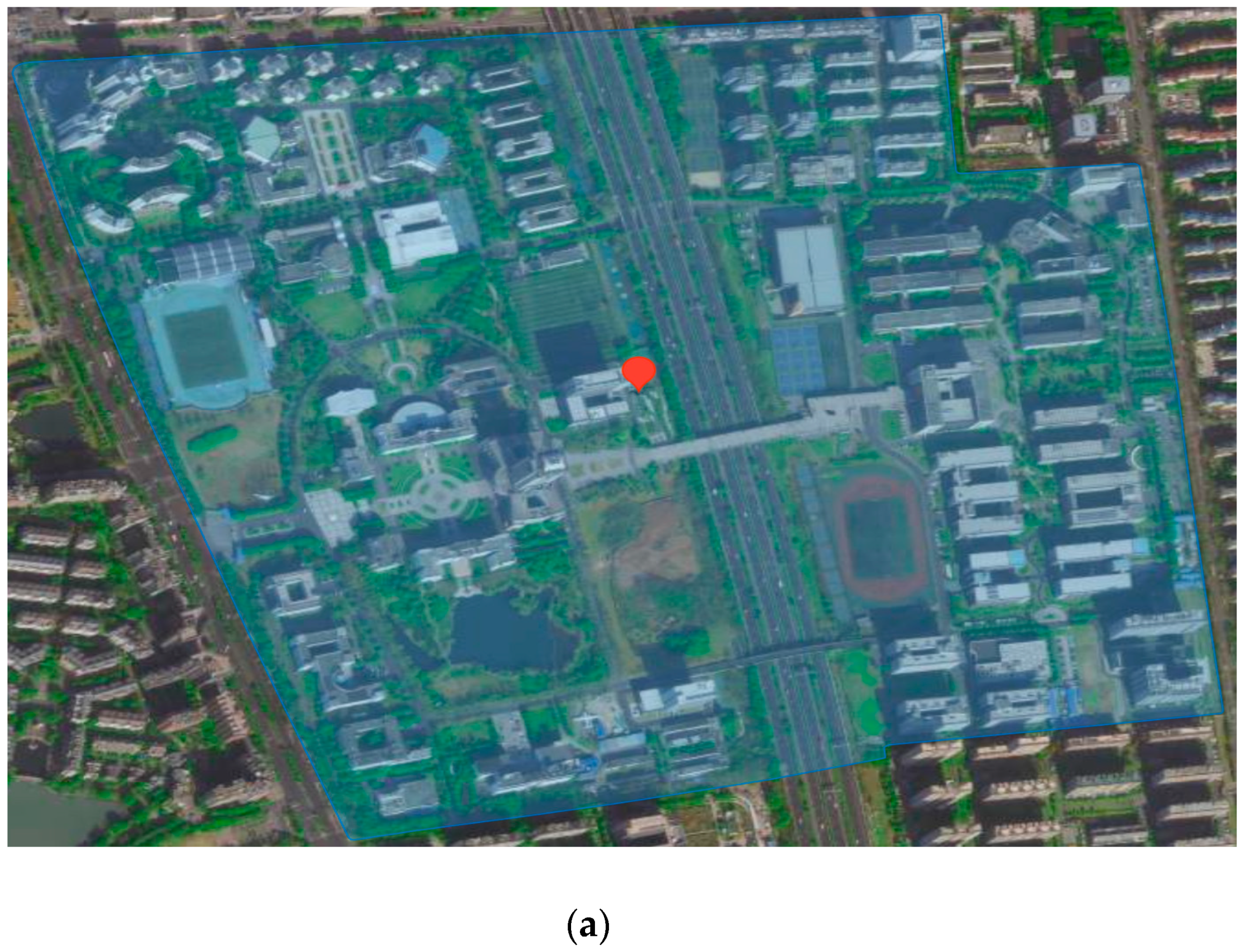
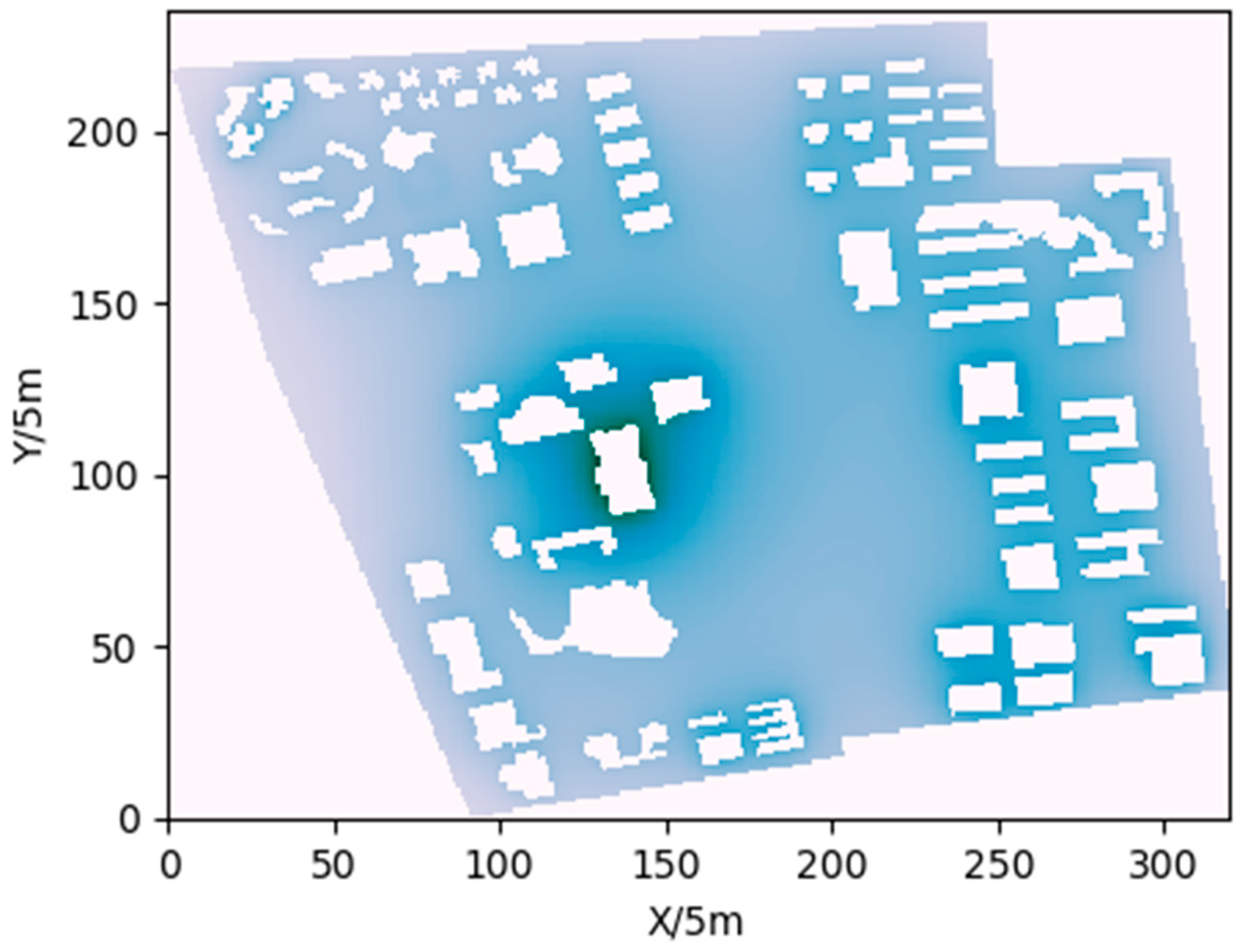
- (1)
- Simulation Environment
- (2)
- Parameters
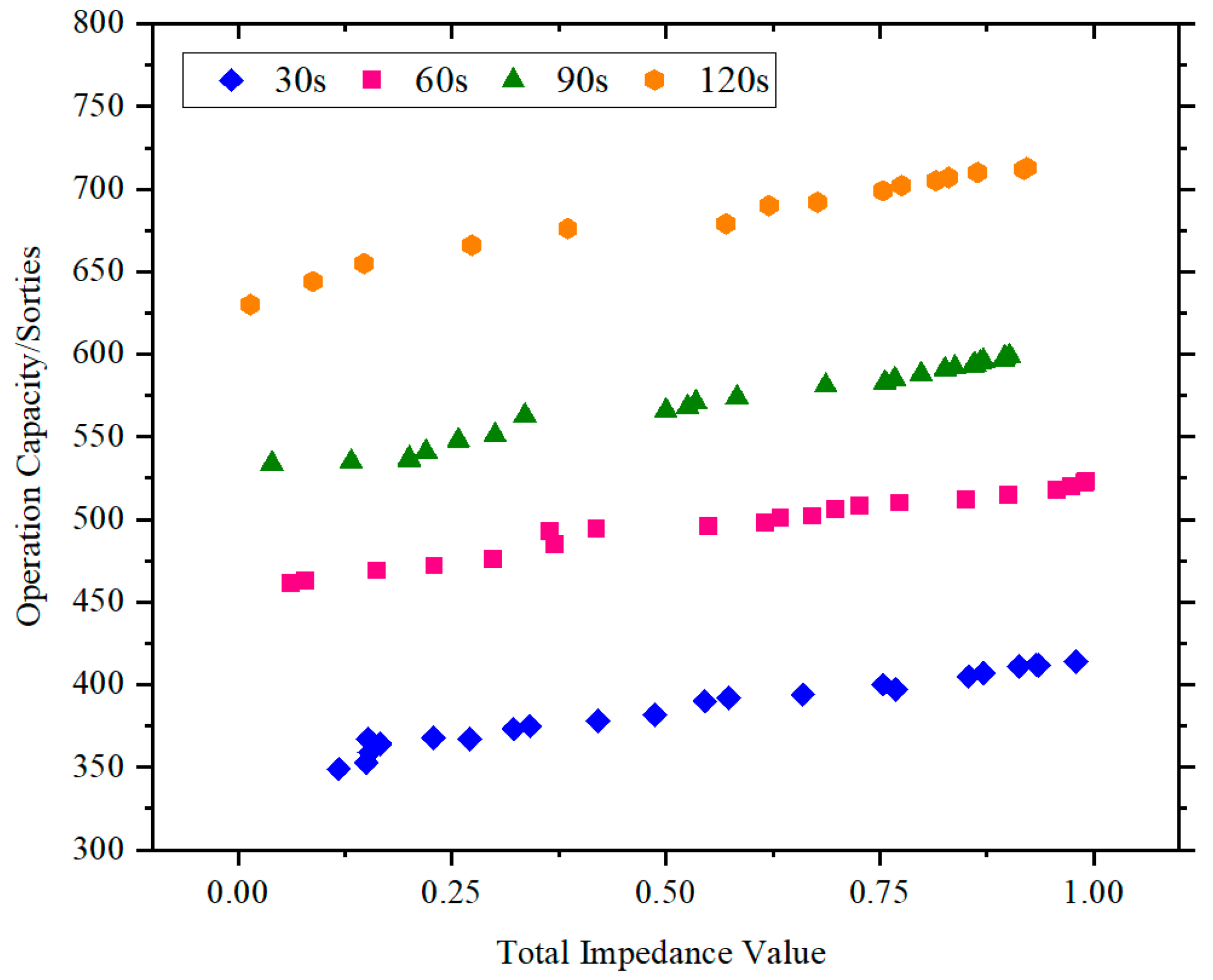
5.2. Results Analysis
5.2.1. Operation Capacity Analysis
5.2.2. Key Parameter Analysis
- (1)
- Safety Interval
- (2)
- Flight Speed
6. Conclusions
- This paper clarifies the operation mode of logistics UAVs in urban low-altitude airspace and defines the operation capacity of logistics UAV route networks as the maximum sortie of logistics UAVs that can be served during the operation time of all vertiports in the route network. A bi-objective optimization model for assessing the logistics UAV route network operation capacity is established, considering safety, cost, and noise factors. The first objective is to maximize the logistics UAV delivery plan that can be executed during operation time. The second objective is to minimize the total impedance value;
- The route network is established utilizing real-world geographic data with a total of 62 vertiports, including 53 end delivery stations and 9 public delivery stations, divided into 4 communities. Based on the above model and experimental scenarios, the NSGA-II algorithm is adopted to solve the model with operation times of 30 s, 60 s, 90 s, and 120 s, respectively. As the operation time increases, the optimal route network capacity increases from 414 to 711, and the algorithm convergence rate slows down, indicating the reasonableness of the proposed model and algorithm;
- Comparative experiments were designed for the key parameter of the safety interval to assess the logistics UAV route network operation capacity at different operating times with safety intervals of 15 m, 20 m, 25 m, and 30 m. Experiments reveal that when the safety interval rises, the average operation capacity of the route network rapidly declines, and the sensitivity to the safety interval decreases accordingly. In addition, the average total impedance value varies less than the average operation capacity, indicating that the impedance value required to achieve the same increase in operation capacity is decreasing under the influence of marginal effects;
- Multiple group experiments are carried out to analyze the trend of the route network operation capacity when the flight speed of logistics UAVs is increased from 10 m/s, in 0.5 m/s increments, to 15 m/s, with the goal to expand the relationship between the flight speed of logistics UAVs and the route network operation capacity. The experiments show that as the flight speed increases, the average operation capacity gradually rises, especially when the logistics UAV flight speed is between 10 m/s and 10.5 m/s. The route network operation capacity is influenced by the flight speed, and its influence gradually strengthens as the operation time rises.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| Abbreviation | Meaning | |
| UAM | Urban Air Mobility | A new three-dimensional transport system with integrated manned/unmanned aerial vehicle operations on an urban or intercity scale [1,2]. |
| Logistics UAV | Logistics Unmanned Aerial Vehicle | Unmanned Aerial Vehicles (UAVs) used in logistics and transport applications, usually carrying parcels [15]. |
| eVTOL | Electric Vertical Takeoff and Landing | An innovative aircraft, vertical takeoff and landing aircraft with an electric power engine [18]. |
| Logistics UAV route | Logistics Unmanned Aerial Vehicle route | An airway serving logistics UAVs which usually requires pre-planning [36]. |
| NSGA-II | Non-dominated Sorting Genetic Algorithm-II | One of the most popular multiobjective genetic algorithms, which reduces the complexity of non-inferiority sorting genetic algorithms [37]. |
| GA | Genetic Algorithm | A stochastic search algorithm that draws on natural selection and natural genetic mechanisms in biology [37]. |
| - | Safety Interval | Minimum distance between front and rear logistics UAVs [40]. |
References
- National Aeronautics and Space Administration, SATS: A Bold Vision NASA-Led Technology Development Aimed at Increasing Mobility, Access for Smaller Communities[EB/OL]. Available online: https://www.nasa.gov/centers/langley/news/factsheets/SATS.html#:~:text=The%20Small%20Aircraft%20Transportation%20System%20%28SATS%29%20is%20conceived,initiative%20to%20prove%20the%20SATS%20concept%20will%20work (accessed on 11 April 2023).
- National Aeronautics and Space Administration, Urban Air Mobility Airspace Integration Concepts and Considerations[EB/OL]. Available online: https://ntrs.nasa.gov/api/citations/20180005218/downloads/20180005218.pdf (accessed on 11 April 2023).
- Ackerman, E.; Strickland, E. Medical delivery drones take flight in east africa. IEEE Spectrum 2018, 55, 34–35. [Google Scholar] [CrossRef]
- DHL Express. DHL Express Launches Its First Regular Fully-Automated and Intelligent Urban Drone Delivery Service[EB/OL]. Available online: https://www.dhl.com/global-en/home/press/press-archive/2019/dhl-express-launches-its-first-regular-fully-automated-and-intelligent-urban-drone-delivery-service.html (accessed on 11 April 2023).
- Markets and Markets, Drone Logistics and Transportation Market by Solution, Application, Range, User-Global Forecast to 2030[EB/OL]. Available online: https://www.marketsandmarkets.com/Market-Reports/drone-logistic-transportation-market-132496700.html (accessed on 11 April 2023).
- Lashari, H.N.; Ali, H.M.; Massan, S.U.R. Applications of unmanned aerial vehicles: A review. Tecnol. Glosas InnovaciÓN Apl. Pyme. Spec. 2019, 2019, 85–105. [Google Scholar] [CrossRef]
- Pina-Pardo, J.C.; Silva, D.F.; Smith, A.E. The Traveling Salesman Problem with Release Dates and Drone Resupply. Comput. Oper. Res. 2020, 129, 105170. [Google Scholar] [CrossRef]
- Coindreau, M.A.; Gallay, O.; Zufferey, N. Parcel delivery cost minimization with time window constraints using trucks and drones. Networks 2021, 78, 400–420. [Google Scholar] [CrossRef]
- Sah, B.; Gupta, R.; Bani-Hani, D. Analysis of barriers to implement drone logistics. Int. J. Logist. Res. Appl. 2020, 24, 531–550. [Google Scholar] [CrossRef]
- Sandbrook, C. The social implications of using drones for biodiversity conservation. Ambio 2015, 44, 636–647. [Google Scholar] [CrossRef] [PubMed]
- Moshref-Javadi, M.; Winkenbach, M. Applications and Research Avenues for Drone-Based Models in Logistics: A Classification and Review. Expert Syst. Appl. 2021, 117, 114854. [Google Scholar] [CrossRef]
- Kwon, H.; Kim, J.; Park, Y. Applying LSA text mining technique in envisioning social impacts of emerging technologies: The case of drone technology. Technovation 2017, 60, 15–28. [Google Scholar] [CrossRef]
- Goodchild, A.; Toy, J. Delivery by drone: An evaluation of unmanned aerial ve-hicle technology in reducing CO2 emissions in the delivery service industry. Pergamon 2017, 61, 58–67. [Google Scholar] [CrossRef]
- Shi, Z.; Ng, W.K. A collision-free path planning algorithm for unmanned aerial vehicle delivery. In Proceedings of the 2018 International Conference on Unmanned Aircraft Systems (ICUAS), Dallas, TX, USA, 12–15 June 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 358–362. [Google Scholar]
- Duan, F.; Li, X.; Zhao, Y. Express UAV Swarm Path Planning with VND Enhanced Memetic Algorithm. In Proceedings of the 2018 International Conference on Computing and Data Engineering, Paris, France, 16–19 April 2018; pp. 93–97. [Google Scholar]
- Zhao, Y.; Liu, K.; Lu, G.; Hu, Y.; Yuan, S. Path planning of UAV delivery based on improved APF-RRT* algorithm. In Journal of Physics: Conference Series; IOP Publishing: Bristol, UK, 2020; Volume 1624, p. 042004. [Google Scholar]
- Shavarani, S.M.; Nejad, M.G.; Rismanchian, F.; Izbirak, G. Application of hierarchical facility location problem for optimization of a drone delivery system: A case study of Amazon prime air in the city of San Francisco. Int. J. Adv. Manuf. Technol. 2018, 95, 3141–3153. [Google Scholar] [CrossRef]
- German, B.; Daskilewicz, M.; Hamilton, T.K.; Warren, M.M. Cargo delivery in by passenger evtol aircraft: A case study in the san francisco bay area. In Proceedings of the 2018 AIAA Aerospace Sciences Meeting, Kissimmee, FL, USA, 8–12 January 2018; p. 2006. [Google Scholar]
- Hong, I.; Kuby, M.; Murray, A.T. A range-restricted recharging station coverage model for drone delivery service planning. Transp. Res. Part C Emerg. Technol. 2018, 90, 198–212. [Google Scholar] [CrossRef]
- Brunner, G.; Szebedy, B.; Tanner, S.; Wattenhofer, R. The urban last mile problem: Autonomous drone delivery to your balcony. In Proceedings of the 2019 International Conference on Unmanned Aircraft Systems (icuas), Atlanta, GA, USA, 11–14 June 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1005–1012. [Google Scholar]
- Li, J.; Liu, H.; Lai, K.K.; Ram, B. Vehicle and UAV Collaborative Delivery Path Optimization Model. Mathematics 2022, 10, 3744. [Google Scholar] [CrossRef]
- Li, S.; Zhang, H.; Li, Z.; Liu, H. An Air Route Network Planning Model of Logistics UAV Terminal Distribution in Urban Low Altitude Airspace. Sustainability 2021, 13, 13079. [Google Scholar] [CrossRef]
- Mohamed Salleh, M.F.B.; Chi, W.C.; Wang, Z.K.; Huang, S.; Tan, D.Y.; Huang, T.; Low, K.H. Preliminary concept of adaptive urban airspace management for unmanned aircraft operations. In 2018 AIAA Information Systems-AIAA Infotech@ Aerospace; AIAA: Kissimmee, FL, USA, 2018; p. 2260. [Google Scholar]
- Bowen, E.; Pearcey, T. Delays in the flow of air traffic. Aeronaut. J. 1948, 52, 251–258. [Google Scholar] [CrossRef]
- Janic, M.; Tosic, V. Terminal airspace capacity model. Transp. Res. Part A Gen. 1982, 16, 253–260. [Google Scholar] [CrossRef]
- Majumdar, A.; Ochieng, W.; Polak, J. Estimation of european airspace capacity from a model of controller workload. J. Navig. 2002, 55, 381–403. [Google Scholar] [CrossRef]
- Wang, C.; Zhang, X.Y.; Xu, X.H. Simulation study on airfield system capacity analysis using SIMMOD. In Proceedings of the 2008 International Symposium on Computational Intelligence and Design, Wuhan, China, 17–18 October 2008; IEEE: Piscataway, NJ, USA, 2008; Volume 1, pp. 87–90. [Google Scholar]
- Zhang, K.; Liu, Y.; Wang, J.; Song, H.; Liu, D. Tree-based airspace capacity estimation. In Proceedings of the 2020 Integrated Communications Navigation and Surveillance Conference (ICNS), Herndon, VA, USA, 8–10 September 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 5C1-1–5C1-8. [Google Scholar]
- Bulusu, V.; Sengupta, R.; Polishchuk, V.; Sedov, L. Cooperative and non-cooperative UAS traffic volumes. In Proceedings of the 2017 International Conference on Unmanned Aircraft Systems (ICUAS), Miami, FL, USA, 13–16 June 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1673–1681. [Google Scholar]
- Bulusu, V.; Polishchuk, V. A threshold based airspace capacity estimation method for UAS traffic management. In Proceedings of the 2017 Annual IEEE International Systems Conference (SysCon), Montreal, QC, Canada, 24–27 April 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1–7. [Google Scholar]
- Bulusu, V.; Polishchuk, V.; Sengupta, R.; Sedov, L. Capacity estimation for low altitude airspace. In Proceedings of the 17th AIAA Aviation Technology, Integration, and Operations Conference, Denver, CO, USA, 5–9 June 2017; p. 4266. [Google Scholar]
- Sunil, E.; Hoekstra, J.M.; Ellerbroek, J.; Bussink, F.; Nieuwenhuisen, D.; Vidosavljevic, A.; Kern, S. Metropolis: Relating airspace structure and capacity for extreme traffic densities. In Proceedings of the 11th USA/Europe Air Traffic Management Research and Development Seminar (ATM2015), Lisbon, Portugal, 23–26 June 2015. [Google Scholar]
- Bulusu, V.; Sengupta, R.; Liu, Z. Unmanned aviation: To be free or not to be free? In Proceedings of the 7th International Conference on Research in Air Transportation, Philadelphia, PA, USA, 20–24 June 2016. [Google Scholar]
- Mueller, E.R. Enabling Airspace Integration for High Density Urban Air Mobility; Ames: National Aeronautics and Space Administration (NASA): Moffett Field, CA, USA, 2017. [Google Scholar]
- Ren, X.; Chen, C. Construction and application of third-party risk model for unmanned aerial vehicle operation in urban environment. China Saf. Sci. J. 2021, 31, 15–20. [Google Scholar]
- Zhang, H.; Wang, F.; Feng, D.; Du, S.; Zhong, G.; Deng, C.; Zhou, J. A Logistics UAV Parcel-Receiving Station and Public Air-Route Planning Method Based on Bi-Layer Optimization. Appl. Sci. 2023, 13, 1842. [Google Scholar] [CrossRef]
- Deb, K.; Pratap, A.; Agarwal, S.; Meyarivan, T.A.M.T. A fast and elitist multiobjective genetic algorithm: NSGA-II. IEEE Trans. Evol. Comput. 2002, 6, 182–197. [Google Scholar] [CrossRef]
- Jiang, Y.; Ji, W.; He, X.; Su, X. Low-carbon Scheduling of Multi-objective Flexible Job-shop Based on Improved NSGA-II. China Mech. Eng. 2022, 33, 2564–2577. [Google Scholar]
- Chen, A.Z.J.; Mo, J.P.T. Modelling of unmanned aerial vehicle deliveries in populated urban areas for risk management. In Proceedings of the 2016 10th International Conference on Software, Knowledge, Information Management & Applications (SKIMA), Chengdu, China, 15–17 December 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 61–66. [Google Scholar]
- Zou, Y.; Zhang, H.; Zhong, G.; Liu, H.; Feng, D. Collision probability estimation for small unmanned aircraft systems. Reliab. Eng. Syst. Saf. 2021, 213, 107619. [Google Scholar] [CrossRef]
- Yi, J.; Zhang, H.; Li, S.; Feng, O.; Zhong, G.; Liu, H. Logistics UAV Air Route Network Capacity Evaluation Method Based on Traffic Flow Allocation. IEEE Access 2023, 11, 63701–63713. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Delivery Plan Serial Number | Route | Package Weight (kg) |
|---|---|---|
| 1 | O1→O2 | 2 |
| k − 1 | O2→O3→O4 | 1 |
| 3 | O2→O3→Oj | 2.5 |
| 2 | O1→O3→O4→Oj | 0.5 |
| 4 | O3→O4 | 3 |
| k | O4→O5→Oj | 1.5 |
| … | … | … |
| 5 | O1→O2→O3 | 3 |
| Parameter | Meaning | Value |
|---|---|---|
| The length of logistics UAV wingspan | 1 m | |
| The length of logistics UAV fuselages | 0.5 m | |
| The height of logistics UAV fuselages | 0.5 m | |
| Logistics UAV unladen mass | 4 kg | |
| The mass of logistics UAV carried package | [0, 3] kg | |
| The upper limit of logistics UAV takeoff mass | 7 kg | |
| Logistics UAV flight speed | 10 m/s | |
| The takeoff interval time between the two logistics UAVs before and after | 1.5 s | |
| 3 | ||
| The average sheltering factor of the route | 0.5 | |
| Fixed parameter | 106 J | |
| Fixed parameter | 100 J | |
| The people’s acceptable value of logistics UAS noise | 30 Db | |
| The upper limit of logistics UAV flight distance | 4 km | |
| Safety impedance weighting coefficients | 0.4 | |
| Noise impedance weighting coefficients | 0.3 | |
| Cost impedance weighting coefficients | 0.3 | |
| Z | The number of retained individuals | 100 |
| The maximum number of iterations | 1000 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yi, J.; Zhang, H.; Wang, F.; Ning, C.; Liu, H.; Zhong, G. An Operational Capacity Assessment Method for an Urban Low-Altitude Unmanned Aerial Vehicle Logistics Route Network. Drones 2023, 7, 582. https://doi.org/10.3390/drones7090582
Yi J, Zhang H, Wang F, Ning C, Liu H, Zhong G. An Operational Capacity Assessment Method for an Urban Low-Altitude Unmanned Aerial Vehicle Logistics Route Network. Drones. 2023; 7(9):582. https://doi.org/10.3390/drones7090582
Chicago/Turabian StyleYi, Jia, Honghai Zhang, Fei Wang, Changyuan Ning, Hao Liu, and Gang Zhong. 2023. "An Operational Capacity Assessment Method for an Urban Low-Altitude Unmanned Aerial Vehicle Logistics Route Network" Drones 7, no. 9: 582. https://doi.org/10.3390/drones7090582
APA StyleYi, J., Zhang, H., Wang, F., Ning, C., Liu, H., & Zhong, G. (2023). An Operational Capacity Assessment Method for an Urban Low-Altitude Unmanned Aerial Vehicle Logistics Route Network. Drones, 7(9), 582. https://doi.org/10.3390/drones7090582