
Mapping the Urban Environments of Aedes aegypti Using Drone Technology

 ,
,  ,
,  ,
,  ,
,
Abstract
:1. Introduction
2. Materials and Methods
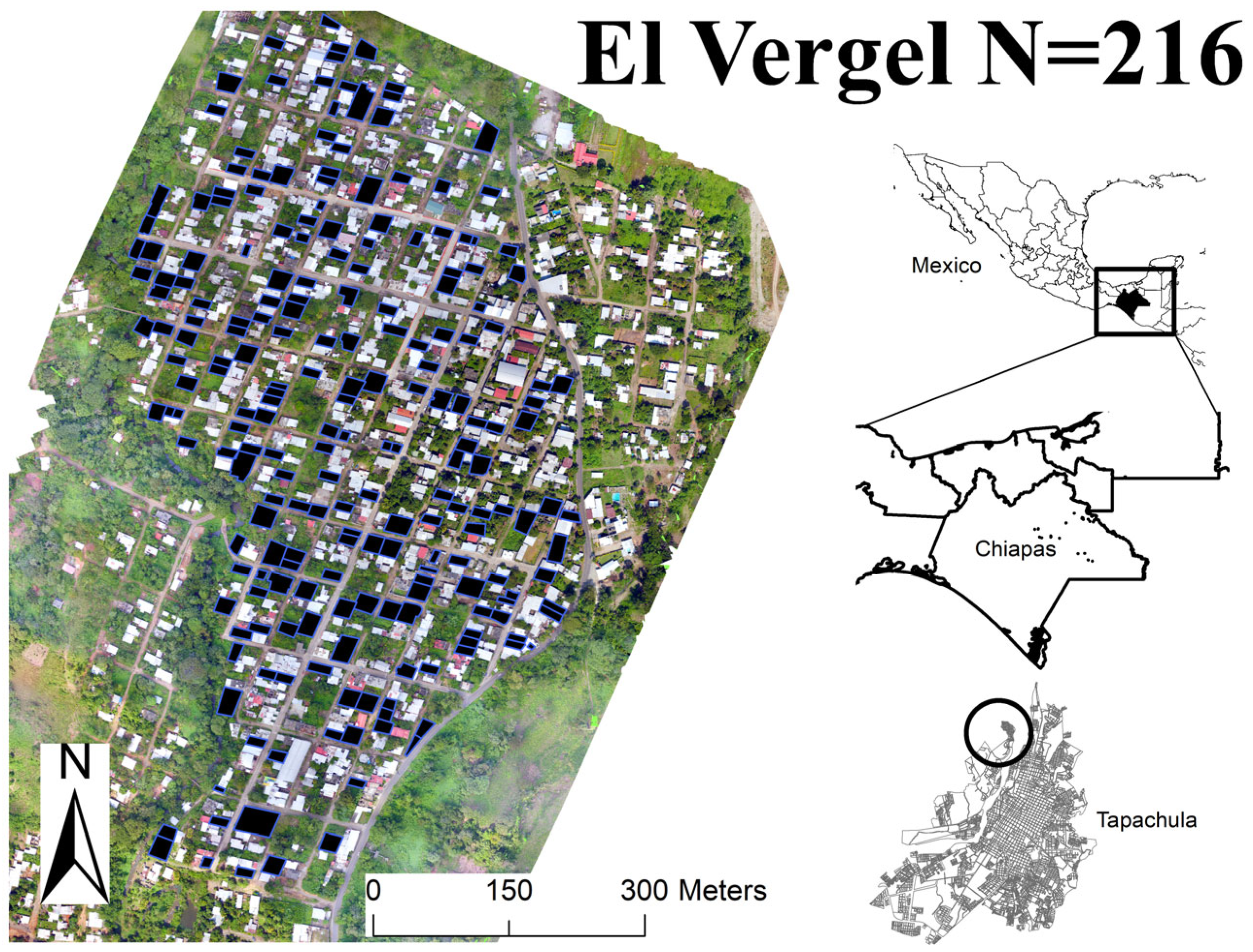
2.1. Study Area
2.2. Aerial System
2.3. Software Interface and Sensors
2.4. Flight Planning
2.5. Execution of Overflights
2.6. Orthomosaic Construction
2.7. Vegetation Indexes
- a)
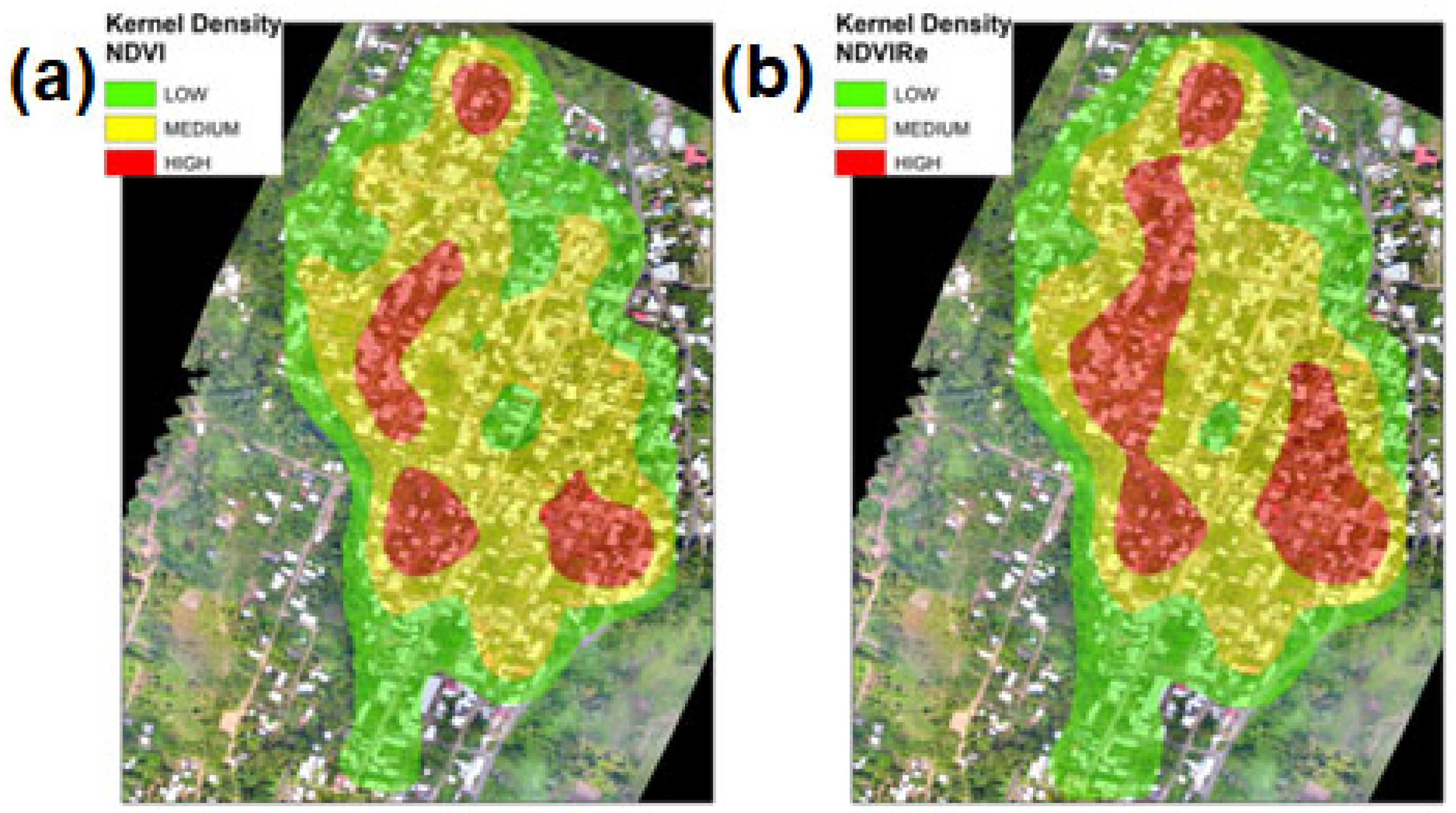
- Normalized Differential Vegetation Index (NDVI). This index makes it possible to obtain biomass values and their chlorophyll response, mainly in the near-infrared and red spectra, which is related to the photosynthetic activity of plants, allowing their vigorousness to be determined. The spectral response of the vegetation is visible in the red and near-infrared bands. These values are between −1 and 1; those above 0.1 refer to the presence of vegetation, and the higher the value, the greater the vigor of the plants. Equation: [32,33].
- b)
- Normalized Difference Vegetation Index RedEdge (NDVIRe). This spectral index is constructed as a mixture of NIR bands and a band using a narrow spectral range between visible red and NIR. It is more sensitive than NDVI during a certain period of crop maturation. It is more valuable than NDVI for intensive use throughout the growing season, as NDVI often becomes inaccurate when plants accumulate the maximum possible amount of chlorophyll. Equation: [33,34].
2.8. Fieldwork Entomological Surveys
2.9. Data Analysis
3. Results
3.1. Drone Flights
3.2. Cartography
3.3. Entomology Surveillance
3.4. Kernel Density
3.5. Statistical Model
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ferraguti, M.; Martinez de la Puente, J.; Roiz, D.; Ruiz, S.; Soriguer, R.; Figueola, J. Effects of landscape anthropization on mosquito community composition and abundance. Sci. Rep. 2016, 6, 29002. [Google Scholar] [CrossRef] [PubMed]
- Shocket, M.S.; Anderson, C.B.; Caldwell, J.M.; Childs, M.L.; Couper, L.I.; Han, S.; Harris, M.J.; Howard, M.E.; MacDonald, A.J.; Nova, N.; et al. Environmental drivers of vector-borne diseases. In Population Biology of Vector-Borne Diseases; Drake, J.M., Bonsall, M.B., Strand, M.R., Eds.; Oxford University Press: Oxford, UK, 2021; pp. 85–118. [Google Scholar] [CrossRef]
- Campbell, L.P.; Luther, C.; Moo-Llanes, D.A.; Ramsey, J.M.; Danis-Lozano, R.; Peterson, A.T. Climate change influences on global distributions of dengue and chikungunya virus vectors. Philos. Trans. R Soc. B 2015, 370, 1665. [Google Scholar] [CrossRef] [PubMed]
- Benedict, M.Q.; Levine, R.S.; Hawley, W.A.; Lounibos, L.P. Spread of the tiger: Global risk of invasion by the mosquito Aedes albopictus. Vector-Borne Zoonotic Dis. 2007, 7, 76–85. [Google Scholar] [CrossRef]
- Wilke, A.B.B.; Chase, C.; Vasquez, C.; Carvajal, A.; Medina, J.; Petrie, W.; Beier, J.C. Urbanization creates diverse aquatic habitats for immature mosquitoes in urban areas. Sci. Rep. 2019, 9, 15335. [Google Scholar] [CrossRef]
- Wilke, A.B.B.; Caban-Martinez, A.J.; Ajelli, M.; Vasquez, C.; Petrie, W.; Beier, J.C. Mosquito adaptation to the extreme habitats of urban construction sites. Trends Parasitol. 2019, 35, 607–614. [Google Scholar] [CrossRef]
- Wilke, A.B.B.; Vasquez, C.; Carvajal, A.; Moreno, M.; Fuller, D.O.; Cardenas, G.; Petrie, W.D.; Beier, J.C. Urbanization favors the proliferation of Aedes aegypti and Culex quinquefasciatus in urban areas of Miami-Dade County, Florida. Sci. Rep. 2021, 11, 22989. [Google Scholar] [CrossRef] [PubMed]
- Pernat, N.; Kampen, H.; Jeschke, J.M.; Werner, D. Buzzing Homes: Using Citizen Science Data to Explore the Effects of Urbanization on Indoor Mosquito Communities. Insects 2021, 12, 374. [Google Scholar] [CrossRef]
- Gómez-Dantes, H.; Farfán-Ale, J.A.; Sarti, E. Epidemiological trends of Dengue Disease in México (2000–2011): A systematic literature search and analysis. PLoS Neglected Trop. Dis. 2014, 8, e3158. [Google Scholar] [CrossRef]
- Instituto Nacional de Estadística. Geografía e Informática. Censo de Población y Vivienda 2020. MEX-INEGI 40.201.01-CPV-2020. Available online: https://inegi.org.mx/programas/ccpv/2020/ (accessed on 12 March 2022).
- Diaz-Quijano, F.A.; Waldman, E.A. Factors associated with dengue mortality in Latin America and the Caribbean, 1995–2009: An ecological study. Am. J. Trop. Med. Hyg. 2012, 86, 328–334. [Google Scholar] [CrossRef]
- Moo-Llanes, D.A.; Lopez-Ordoñez, T.; Torres-Monzon, J.A.; Mosso-Gonzalez, C.; Casas-Martinez, M.; Samy, A.M. Assessing the potential distributions of the invasive mosquito vector Aedes albopictus and its natural Wolbachia infections in México. Insects 2021, 12, 143. [Google Scholar] [CrossRef] [PubMed]
- Colomina, I.; Molina, P. Unmanned aerial systems for photogrammetry and remote sensing: A review. ISPRS J. Photogramm. Remote Sens. 2014, 92, 79–97. [Google Scholar] [CrossRef]
- Eskandari, R.; Mahdianpari, M.; Mohammadimanesh, F.; Salehi, B.; Brisco, B.; Homayouni, S. Meta-analysis of unmanned aerial vehicle (UAV) imagery for agro-environmental monitoring using machine learning and statistical models. Remote Sens. 2020, 12, 3511. [Google Scholar] [CrossRef]
- Rojas-Viloria, D.; Solano, E.L.; Muñoz-Villamizar, A.; Montoya-Torres, J.R. Unmanned aerial vehicles/drones in vehicles routing problems: A literature review. Int. Trans. Oper. Res. 2021, 28, 1626–1657. [Google Scholar] [CrossRef]
- Carrasco-Escobar, G.; Moreno, M.; Fornace, K.; Herrera-Varela, M.; Manrique, E.; Con, J.E. The use of drones for mosquito surveillance and control. Parasites Vectors 2022, 15, 473. [Google Scholar] [CrossRef] [PubMed]
- Carrasco-Escobar, G.; Manrique, E.; Ruiz-Cabrejos, J.; Saavedra, M.; Alava, F.; Bickersmith, S.; Prussing, C.; Vinetz, J.M.; Conn, J.E.; Moreno, M.; et al. High-accuracy detection of malaria vector larval habitats using drone-based multispectral imagery. PLoS Neglected Trop. Dis. 2019, 13, e0007105. [Google Scholar] [CrossRef]
- Velozo, F.; Cavicchioli, Z.; Nogueira, L.H.; de Genaro, D.; Braghini, A.; Colmenero, J. Choice of unmanned aerial vehicles for identification of mosquito breeding sites. Geospat. Health 2019, 15, 810. [Google Scholar] [CrossRef]
- Valdez-Delgado, K.M.; Moo-Llanes, D.A.; Danis-Lozano, R.; Cisneros-Vázquez, L.A.; Flores-Suarez, A.E.; Ponce-García, G.; Medina-De la Garza, C.E.; Díaz-González, E.E.; Fernández-Salas, I. Field Effectiveness of Drones to Identify Potential Aedes aegypti Breeding Sites in Household Environments from Tapachula, a Dengue-Endemic City in Southern Mexico. Insects 2021, 12, 663. [Google Scholar] [CrossRef]
- Fornace, K.M.; Drakeley, C.; William, T.; Espíno, F.; Cox, J. Mapping infectious disease landscapes: Unmanned aerial vehicles and epidemiology. Trends Parasitol. 2014, 30, 514–519. [Google Scholar] [CrossRef]
- Hardy, A.; Makame, M.; Cross, D.; Majambere, S.; Msellem, M. Using low-cost drones to map malaria vector habitats. Parasites Vectors 2017, 10, 29. [Google Scholar] [CrossRef]
- Muñiz-Sánchez, V.; Valdez-Delgado, K.M.; Hernandez-Lopez, F.J.; Moo-Llanes, D.A.; González-Farías, G.; Danis-Lozano, R. Use of Unmanned Aerial Vehicles for Building a House Risk Index of Mosquito-Borne Viral Diseases. Machines 2022, 10, 1161. [Google Scholar] [CrossRef]
- DJI 2019. Zenmuse X5 Camera®. Available online: https://www.dji.com/mx/zenmuse-x5/info#specs (accessed on 10 October 2019).
- MicaSense Inc. Red Edge®. 2019. Available online: https://support.micaSense.com/hc/en-us/articles/115003537673-RedEdge-M-User-Manual-PDF- (accessed on 10 October 2019).
- Pix4D Capture. 2019. Available online: https://www.pix4d.com/es/producto/pix4dcapture (accessed on 5 November 2019).
- Pérez, J. Apuntes de Fotogrametría III; Universidad de Extremadura, Centro Universitario de Mérida: Mérida, Spain, 2021; 242p. [Google Scholar]
- Google Earth. 2019. Available online: https://www.google.com/intl/es-419/earth/ (accessed on 28 November 2019).
- Diario Oficial de la Federación. NORMA Oficial Mexicana NOM-107-SCT3-2019, Que establece los Requerimientos Para Operar un Sistema de Aeronave Pilotada a Distancia (RPAS) en el Espacio Aéreo Mexicano. DOF: 14/11/2019. Available online: http://www.dof.gob.mx/normasOficiales/8006/sct11_C/sct11_C.html (accessed on 18 April 2022).
- Galindo, C. Fotogrametría Aplicada a la Ingeniería. Bachelor’s Thesis, Universidad Nacional Autónoma de México, México City, México, 2010; 264p. [Google Scholar]
- Pix4D. Pix4Dmapper 4.1 User manual. Pix4D SA: Lausanne, Switzerland. 2017. Available online: https://support.pix4d.com/hc/en-us/articles/204272989-Offline-Getting-Started-and-Manual-pdf (accessed on 22 November 2019).
- ArcGIS Desktop, A.D. 2020. Available online: https://desktop.arcgis.com/es/arcmap/latest/tools/spatial-analyst-toolbox/raster-calculator.htm (accessed on 22 October 2019).
- Díaz, J. Estudios de Índices de Vegetación a Partir de Imágenes Aéreas Tomadas Desde RPAS y Aplicaciones de Estos a la Agricultura de Precisión. Master’s Thesis, Universidad Complutense de Madrid, Madrid, Spain, 2015. [Google Scholar]
- Sishodia, R.P.; Ray, R.L.; Singh, S.K. Applications of Remote Sensing in Precision Agriculture: A Review. Remote Sens. 2020, 12, 3136. [Google Scholar] [CrossRef]
- EOS. Índice de Clorofila. 2020. Available online: https://eos.com/es/agriculture/ci/#:~:text=El%20%C3%ADndice%20de%20clorofila%20(Cl,de%20los%20tipos%20de%20plantas (accessed on 22 October 2020).
- Arredondo-Jiménez, J.I.; Valdez-Delgado, K.M. Aedes aegypti pupal/demographic surveys in southern Mexico: Consistency and practicality. Ann. Trop. Med. Parasitol. 2006, 100 (Suppl. 1), 17–32. [Google Scholar] [CrossRef]
- Darsie, R.; Ward, R.; Chang, C.; Litwak, T. Identification and Geographical Distribution of the Mosquitoes of North America, North of Mexico; University Press of Florida: Gainesville, FL, USA, 2016. [Google Scholar]
- Ashmore, P.; Lindahl, J.F.; Colón-González, F.J.; Sinh Nam, V.; Quang Tan, D.; Medley, G.F. Spatiotemporal and Socioeconomic Risk Factors for Dengue at the Province Level in Vietnam, 2013–2015: Clustering Analysis and Regression Model. Trop. Med. Infect. Dis. 2020, 5, 81. [Google Scholar] [CrossRef]
- Valdez-Delgado, K.M.; Rios-Delgado, J.C.; Nettel-Cruz, J.A.; Angulo-Kladt, R.; Villarreal-Treviño, C. Aerial release of Aedes aegypti male mosquitoes using an unmanned aerial vehicle: A novel control strategy. Salud Publica México 2023, 65, 387–393. [Google Scholar]
- Mechan, F.; Bartonicek, Z.; Malone, D.; Lees, S.R. Unmanned aerial vehicles for surveillance and control of vectors of malaria and other vector-borne diseases. Malar. J. 2023, 22, 23. [Google Scholar] [CrossRef]
- Estrada Zúñiga, A.C.; Vásquez, J.Ñ. Detection and identification of high Andean plant communities, Wetlands and Tolar de Puna Seca by means of RGB and NDVI orthophotos in” Unmanned Aerial Systems” drones. Sci. Agropecu. 2021, 12, 3. [Google Scholar] [CrossRef]
- Youssefi, F.; Zoej, M.J.V.; Hanafi-Bojd, A.A.; Dariane, A.B.; Khaki, M.; Safdarinezhad, A.; Ghaderpour, E. Temporal Monitoring and Predicting of the Abundance of Malaria Vectors Using Time Series Analysis of Remote Sensing Data through Google Earth Engine. Sensors 2022, 22, 1942. [Google Scholar] [CrossRef]
- Parselia, E.; Kontoes, C.; Tsouni, A.; Hadjichristodoulou, C.; Kioutsioukis, I.; Magiorkinis, G.; Stilianakis, N.I. Satellite Earth Observation Data in Epidemiological Modeling of Malaria, Dengue and West Nile Virus: A Scoping Review. Remote Sens. 2019, 11, 1862. [Google Scholar] [CrossRef]
- Fernández-Salas, I.; Roberts, D.R.; Rodríguez, M.H.; Marina-Fernández, C.F. Bionomics of larval populations of Anopheles pseudopunctipennis in the Tapachula foothills area, southern Mexico. J. Am. Mosq. Control. Assoc. 1994, 10, 477–486. [Google Scholar]
- Yoshio, T.; Suwonkerd, W.; Chawprom, S.; Prajakwong, S.; Takagi, A.M. Different Spatial Distribution of Aedes aegypti and Aedes albopictus along an urban–rural gradient and the relating environmental factors examined in three villages in Northern Thailand. J. Am. Mosq. Control. Assoc. 2006, 22, 222–228. [Google Scholar]
- Landau, K.I.; Van Leeuwen, W.J. Fine scale spatial urban land cover factors associated with adult mosquito abundance and risk in Tucson, Arizona. J. Vector Ecol. 2012, 37, 407–418. [Google Scholar] [CrossRef]
- Viana, C.M.; Oliveira, S.; Oliveira, S.C.; Rocha, J. Land Use/Land Cover Change Detection and Urban Sprawl Analysis. In Spatial Modeling in GIS and R for Earth and Environmental Sciences; Elsevier: Amsterdam, The Netherlands, 2019; pp. 621–651. [Google Scholar] [CrossRef]
- Choubin, B.; Soleimani, F.; Pirnia, A.; Sajedi-Hosseini, F.; Alilou, H.; Rahmati, O.; Shahabi, H. Effects of drought on vegetative cover changes: Investigating spatiotemporal patterns. In Extreme Hydrology and Climate Variability; Elsevier: Amsterdam, The Netherlands, 2019; pp. 213–222. [Google Scholar] [CrossRef]
- Hashim, H.; Abd Latif, Z.; Adnan, N.A. Urban vegetation classification with NDVI threshold value method with very high resolution (VHR) Pleiades imagery. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, 42, 237–240. [Google Scholar] [CrossRef]
- Huang, S.; Tang, L.; Hupy, J.P.; Wang, Y.; Shao, G. A commentary review on the use of normalized difference vegetation index (NDVI) in the era of popular remote sensing. J. For. Res. 2021, 32, 1–6. [Google Scholar] [CrossRef]
- Xue, J.; Su, B. Significant remote sensing vegetation indices: A review of developments and applications. J. Sens. 2017, 2017, 1353691. [Google Scholar] [CrossRef]
- Pope, K.O.; Rejmankova, E.; Savage, H.M.; Arredondo-Jiménez, J.I.; Rodríguez, M.H.; Roberts, D.R. Remote sensing of tropical wetlands for malaria control in Chiapas, Mexico. Ecol. Appl. 1994, 4, 81–90. [Google Scholar]
- Beck, L.R.; Rodríguez, M.H.; Dister, S.W.; Rodríguez, A.D.; Rejmankova, E.; Ulloa, A.; Meza, R.A.; Roberts, D.R.; Paris, J.F.; Spanner, M.A. Remote sensing as a landscape epidemiologic tool to identify villages at high risk for malaria transmission. Am. J. Trop. Med. Hyg. 1994, 51, 271–280. [Google Scholar]
- Beck, L.R.; Rodriguez, M.H.; Dister, S.W.; Rodriguez, A.D.; Washino, R.K.; Roberts, D.R.; Spanner, M.A. An assessment of a remote sensing-based model for predicting malaria transmission risk in villages of Chiapas, Mexico. Am. J. Trop. Med. Hyg. 1997, 56, 99–106. [Google Scholar] [CrossRef]
- Rogers, D.J.; Randolf, S.E.; Snow, R.W.; Hay, S.I. Satellite imagery in the study and forecast of malaria. Nature 2002, 415, 710–715. [Google Scholar]
- Youssefi, F.; Zoej, M.J.V.; Hanafi-Bojd, A.A.; Dariane, A.B.; Khaki, M.; Safdarinezhad, A. Predicting the location of larval habitats of Anopheles mosquitoes using remote sensing and soil type data. Int. J. Appl. Earth Obs. Geoinf. 2022, 108, 102746. [Google Scholar] [CrossRef]
- Valdez-Delgado, K.M. Uso de Drones Para la Asociación de Factores de Riesgo con la Abundancia de Mosquitos Aedes aegypti (Linnaeus) Diptera: Culicidae, en Áreas de Transmisión de Dengue de la Ciudad de Tapachula, Chiapas. Ph.D. Thesis, Universidad Autónoma de Nuevo León, San Nicolás de los Garza, México, 2023. Available online: http://eprints.uanl.mx/id/eprint/25097 (accessed on 9 June 2023).
- Liu-Helmersson, J.; Brännström, Å.; Sewe, M.O.; Semenza, J.C.; Rocklöv, J. Estimating Past, Present, and Future Trends in the Global Distribution and Abundance of the Arbovirus Vector Aedes aegypti Under Climate Change Scenarios. Front. Public Health 2019, 7, 148. [Google Scholar] [CrossRef]
- Rajarethinam, J.; Ong, J.; Neo, Z.-W.; Ng, L.-C.; Aik, J. Distribution and seasonal fluctuations of Ae. aegypti and Ae. albopictus larval and pupae in residential areas in an urban landscape. PLoS Neglected Trop. Dis. 2020, 14, e0008209. [Google Scholar] [CrossRef] [PubMed]
- Che-Mendoza, A.; Martin-Park, A.; Chávez-Trava, J.M.; Contreras-Perera, Y.; Delfín-González, H.; González-Olvera, G.; Manrique-Saide, P. Abundance and seasonality of Aedes aegypti (Diptera: Culicidae) in two suburban localities of South Mexico, with implications for Wolbachia (Rickettsiales: Rickettsiaceae)-carrying male releases for population suppression. J. Med. Entomol. 2021, 58, 1817–1825. [Google Scholar] [CrossRef]
- Sarwan, M.; Rasool, B. Seasonal Prevalence and Phenomenal Biology as Tools for Dengue Mosquito Aedes aegypti (Linnaeus) (Diptera: Culicidae) Management. Braz. Arch. Biol. Technol. 2022, 65, e222200502. [Google Scholar] [CrossRef]
- Marina, C.F.; Bond, J.G.; Hernández-Arriaga, K.; Valle, J.; Ulloa, A.; Fernández-Salas, I.; Carvalho, D.O.; Bourtzis, K.; Dor, A.; Williams, T.; et al. Population Dynamics of Aedes aegypti and Aedes albopictus in Two Rural Villages in Southern Mexico: Baseline Data for an Evaluation of the Sterile Insect Technique. Insects 2021, 12, 58. [Google Scholar] [CrossRef]
- Diario Oficial de la Federación. Ley Federal de Transparencia y Acceso a la Información Pública. DOF 20-05-2021. Secretaría de Gobernación. Gobierno de México. Available online: https://www.diputados.gob.mx/LeyesBiblio/pdf/LFTAIP_200521.pdf (accessed on 30 July 2023).
- Diario Oficial de la Federación. Ley General de Protección de Datos Personales en Posesión de Sujetos obligados. DOF 26-01-2017. Secretaría de Gobernación. Gobierno de México. Available online: https://www.diputados.gob.mx/LeyesBiblio/ref/lgpdppso.htm (accessed on 30 July 2023).
- Hardy, A.; Proctor, M.; MacCallum, C.; Shawe, J.; Abdalla, S.; Rajab, A.; Abdalla, S.; Oakes, G.; Rosu, L.; Worrall, E. Conditional trust: Community perceptions of drone use in malaria control in Zanzibar. Technol. Soc. 2022, 68, 101895. [Google Scholar] [CrossRef]
- Bartumeus, F.; Costa, G.B.; Eritja, R.; Kelly, A.H.; Finda, M.; Lezaun, J. Sustainable innovation in vector control requires strong partnerships with communities. PLoS Neglected Trop. Dis. 2019, 13, e0007204. [Google Scholar] [CrossRef]
- Peters, D.H.; Adam, T.; Alonge, O.; Agyepong, I.A.; Tran, N. Implementation research: What it is and how to do it. BMJ 2013, 347, f6753. [Google Scholar] [CrossRef]
- Dávalos-Becerril, E.; Correa-Morales, F.; González-Acosta, C.; Santos-Luna, R.; Peralta-Rodríguez, J.; Pérez-Rentería, C.; Ordoñez-Álvarez, J.; Huerta, H.; Carmona-Pérez, M.; Díaz-Quiñonez, M.D.; et al. Urban and semi-urban mosquitoes of Mexico City: A risk for endemic mosquito-borne disease transmission. PLoS ONE 2019, 14, e0212987. [Google Scholar] [CrossRef]
- Andreo, V.; Cuervo, P.F.; Porcasi, X.; Lopez, L.; Guzman, C.; Scavuzzo, C.M. Towards a workflow for operational mapping of Aedes aegypti at urban scale based on remote sensing. Remote Sens. Appl. Soc. Environ. 2021, 23, 100554. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Date | Time | Temperature °C | Humidity (%) |
|---|---|---|---|
| 12 November 2019 | 11:27 h | 36.8 | 43 |
| 12 November 2019 | 12:35 h | 34.3 | 48 |
| 12 November 2019 | 12:54 h | 35.8 | 45 |
| 12 November 2019 | 13:32 h | 34.8 | 45 |
| 13 November 2019 | 11:13 h | 36.6 | 44 |
| 13 November 2019 | 12:16 h | 38.0 | 38 |
| 13 November 2019 | 12:44 h | 38.6 | 49 |
| 13 November 2019 | 13:23 h | 34.5 | 44 |
| ZemmuseX5 | MicaSense RedEdge MX | |
|---|---|---|
| Project | VergelX5new | VergelMEnew |
| Processed | 15 January 2020 17:13:52 | 20 January 2020 16:14:53 |
| Camera Model Name(s) | FC550_DJIMFT15mmF1. 7ASPH_15.0_4608 × 3456 (RGB) | RedEdge_5.5_1280 × 960 (Blue) RedEdge_5.5_1280 × 960 (Green) RedEdge_5.5_1280 × 960 (Red) RedEdge_5.5_1280 × 960 (NIR) RedEdge_5.5_1280 × 960 (RedEdge) «MicaSense 5 band» |
| Average Ground Sampling Distance (GSD) | 2.6 cm/1 in | 7.4 cm/2.9 in |
| Resolution | 2.6 cm/pixel | 7.4 cm/pixel |
| Area Covered | 0.8 km2/78.3 ha/ 0.3 sq. mi./193.5 acres | 0.9 km2/85.9 ha/ 0.3 sq. mi./212.3 acres |
| Variable | Number | Obs | Mean | Std. Dev. | Min | Max |
|---|---|---|---|---|---|---|
| Male mosquitoes | 174 | 216 | 1 | 2 | 0 | 14 |
| Female mosquitoes | 175 | 216 | 1 | 2 | 0 | 23 |
| Total of mosquitoes | 349 | 216 | 2 | 3 | 0 | 36 |
| Larvae 1st instar | 353 | 216 | 2 | 9 | 0 | 120 |
| Larvae 2nd instar | 1634 | 216 | 8 | 22 | 0 | 180 |
| Larvae 3rd instar | 2473 | 216 | 11 | 36 | 0 | 276 |
| Larvae 4o instar | 2564 | 216 | 12 | 36 | 0 | 266 |
| Larvae | 7024 | 216 | 33 | 92 | 0 | 690 |
| Pupae | 1090 | 216 | 5 | 15 | 0 | 100 |
| NDVIRe | 216 | 0.11 | 0.12 | −0.12 | 0.47 | |
| NDVI | 216 | 0.19 | 0.23 | −0.14 | 0.74 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Valdez-Delgado, K.M.; Garcia-Salazar, O.; Moo-Llanes, D.A.; Izcapa-Treviño, C.; Cruz-Pliego, M.A.; Domínguez-Posadas, G.Y.; Armendáriz-Valdez, M.O.; Correa-Morales, F.; Cisneros-Vázquez, L.A.; Ordóñez-González, J.G.; et al. Mapping the Urban Environments of Aedes aegypti Using Drone Technology. Drones 2023, 7, 581. https://doi.org/10.3390/drones7090581
Valdez-Delgado KM, Garcia-Salazar O, Moo-Llanes DA, Izcapa-Treviño C, Cruz-Pliego MA, Domínguez-Posadas GY, Armendáriz-Valdez MO, Correa-Morales F, Cisneros-Vázquez LA, Ordóñez-González JG, et al. Mapping the Urban Environments of Aedes aegypti Using Drone Technology. Drones. 2023; 7(9):581. https://doi.org/10.3390/drones7090581
Chicago/Turabian StyleValdez-Delgado, Kenia Mayela, Octavio Garcia-Salazar, David A. Moo-Llanes, Cecilia Izcapa-Treviño, Miguel A. Cruz-Pliego, Gustavo Y. Domínguez-Posadas, Moisés O. Armendáriz-Valdez, Fabián Correa-Morales, Luis Alberto Cisneros-Vázquez, José Genaro Ordóñez-González, and et al. 2023. "Mapping the Urban Environments of Aedes aegypti Using Drone Technology" Drones 7, no. 9: 581. https://doi.org/10.3390/drones7090581
APA StyleValdez-Delgado, K. M., Garcia-Salazar, O., Moo-Llanes, D. A., Izcapa-Treviño, C., Cruz-Pliego, M. A., Domínguez-Posadas, G. Y., Armendáriz-Valdez, M. O., Correa-Morales, F., Cisneros-Vázquez, L. A., Ordóñez-González, J. G., Fernández-Salas, I., & Danis-Lozano, R. (2023). Mapping the Urban Environments of Aedes aegypti Using Drone Technology. Drones, 7(9), 581. https://doi.org/10.3390/drones7090581