



Onboard Distributed Trajectory Planning through Intelligent Search for Multi-UAV Cooperative Flight

Abstract
1. Introduction
- (1)
- The Monte Carlo tree search (MCTS) is used as a task allocation algorithm to conduct obstacle avoidance, which does not require the equality of the row and column numbers of the allocation matrix. Further, the obstacle avoidance for multiple UAVs takes the energy constraint into account.
- (2)
- Knowledge-based particle swarm optimization (Know-PSO) is used as the optimization algorithm to solve the onboard distributed cooperative trajectory planning problem, in which the motion energies of a few good particles are used to improve the velocities of those bad particles, and the information of the individual worst particles and global worst particle are also used. Furthermore, the interaction among multiple UAVs is utilized to avoid conflicts.
- (3)
- The decisions of MCTS are taken as constraints for Know-PSO to form a unified framework for onboard distributed trajectory planning.
- (4)
- The method proposed in this paper has been verified by actual flights and achieved good practical results.
2. Mathematical Model
- (1)
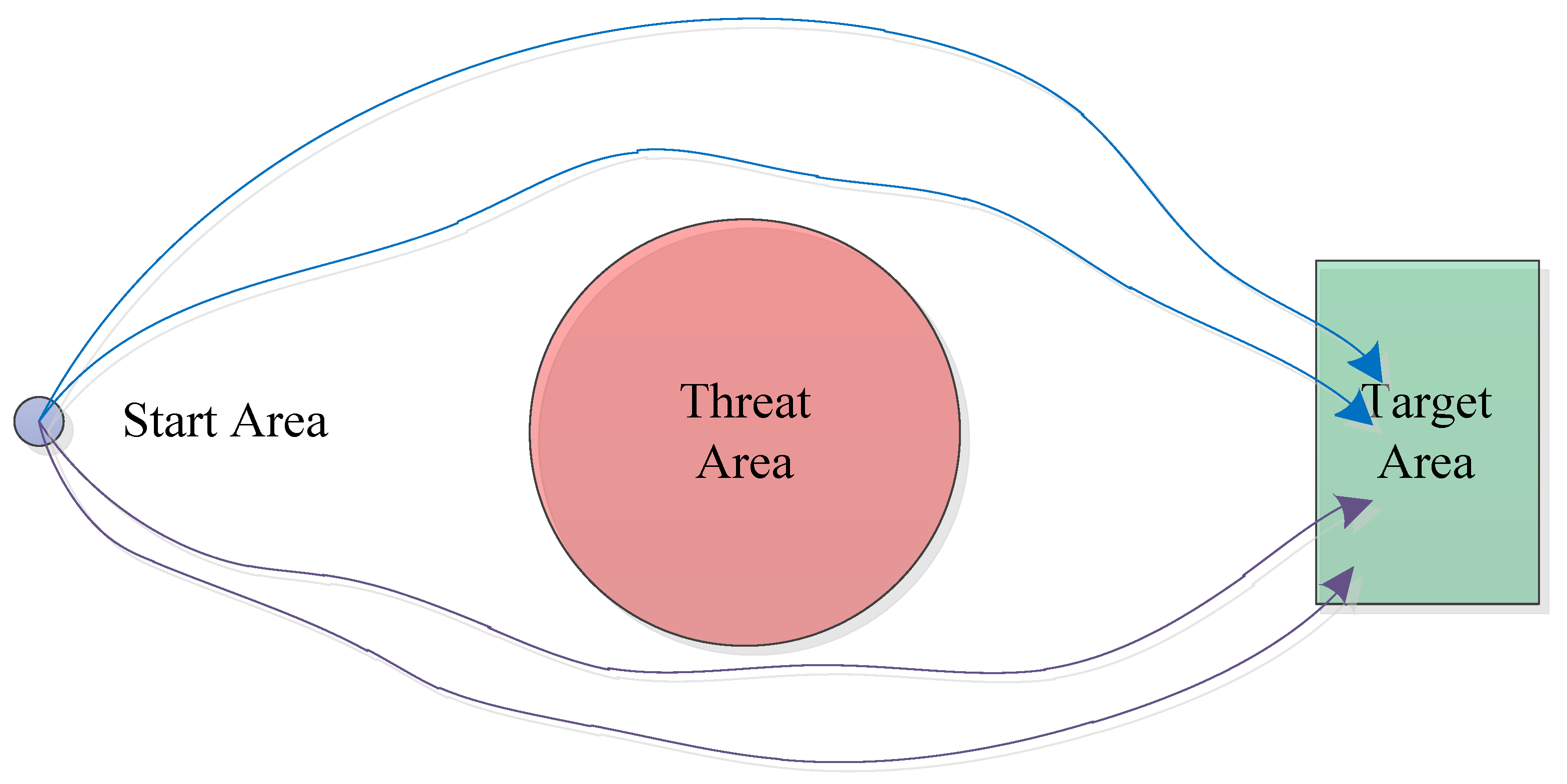
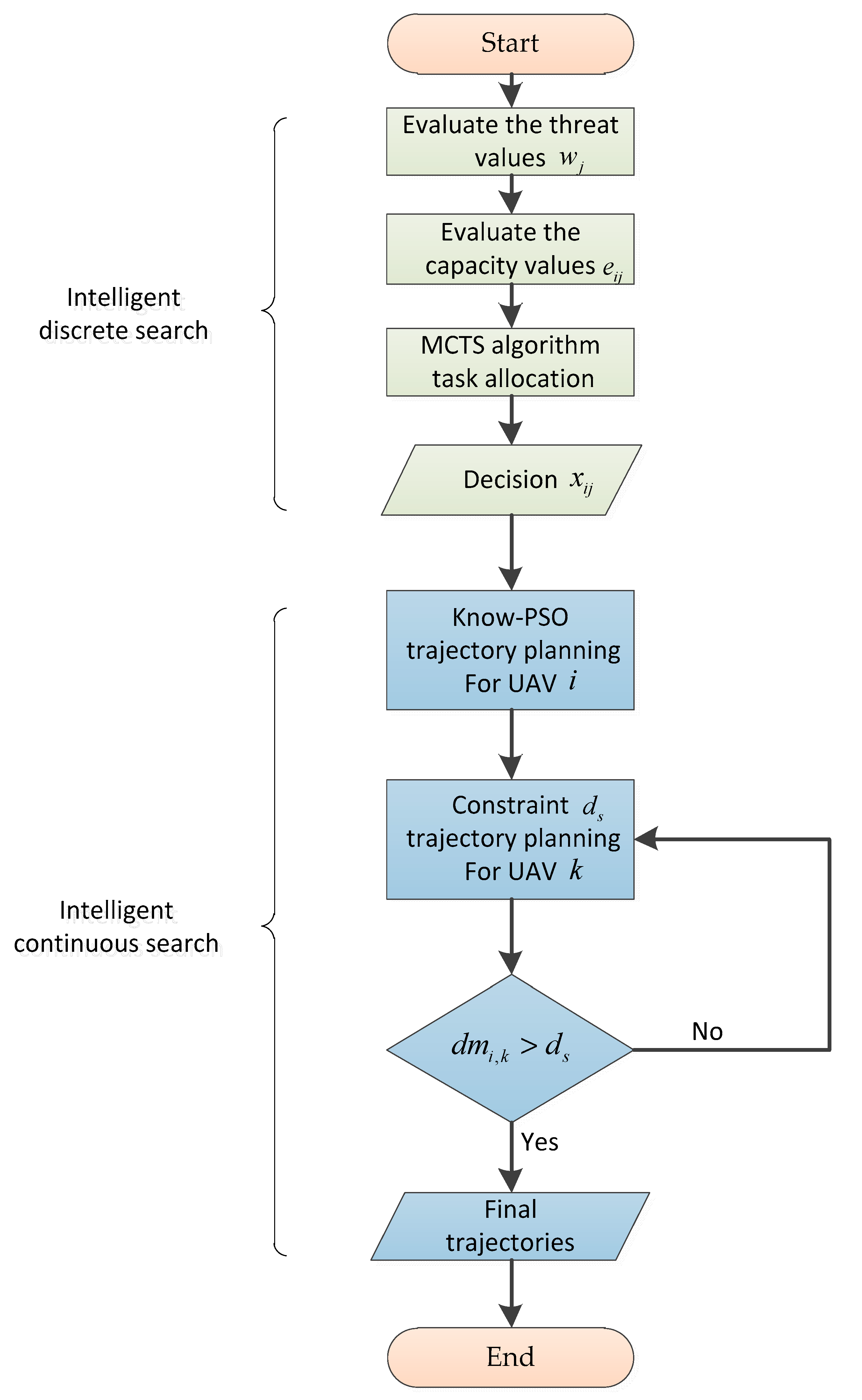
- Task allocation to obstacle avoidance: As shown in Figure 1, m UAVs are configured to go to the target area to conduct some important operations, in which the threat area must be avoided. Regarding each UAV, there are two choices for it to avoid the threat area, going through one side of the threat area or the other. Consequently, the cooperative obstacle avoidance problem can be translated into the task allocation problem, for which there are m decisions that have to be made. Generally, suppose there are n choices for each UAV, then the mathematical model for task allocation is as below:where wj is the threat value of j choice, eij is the capacity evaluation of the i UAV to pass through the j choice and can be seen as the energy constraints, xij is the final decision, whether the i UAV passes through the j choice or not. The MCTS is used to solve the model to obtain xij. All xij compose the task allocation matrix, which is a 0–1 matrix and has m rows and n columns. Each row has only one, which means that the corresponding UAV can only make one choice.
- (2)
- Cooperative trajectory planning driven by obstacle avoidance: The goal of cooperative trajectory planning is to minimize the total distances of m UAVs from the start area to the target area; in the meantime, m UAVs must avoid the threat area and not collide with each other. The mathematical model is as below:where lij is the length of a trajectory that the i UAV pass through the j choice, dmi,k is the margin distance between trajectories of two different UAVs, and ds is the safe distance between two adjacent UAVs. xij is the final decision, whether the i UAV passes through the j choice or not as in formula (1), which is solved by the MCTS method.
3. MCTS-PSO Framework for Onboard Distributed Trajectory Planning
| Algorithm 1: MCTS-PSO framework |
| Input: UAVs number m, choices number n, start position Ps and target position Pt, Threat area center Pc and radius r, the safe distance ds, Output: best trajectories 1: for to m do 2: for to n do 3: Evaluate the threat values wj; 4: Evaluate the capacity values eij; 5: end for 6: end for 7: Use MCTS to solve formula (1) to get decisions xij; 8: Use Know-PSO to generate a trajectory for one UAV i; 9: for to m do 10: if k == i 11: continue; 12: else 13: Use Know-PSO to generate a trajectory for UAV k with ds; 14: Check whether dmi,k is larger than ds or not; 15: end if 16: end for 17: Return m best trajectories; |
| The resulting m best trajectories obtained after the above steps is the optimal solution for onboard distributed cooperative trajectory planning; end |
3.1. MCTS Task Allocation for Multiple UAVs
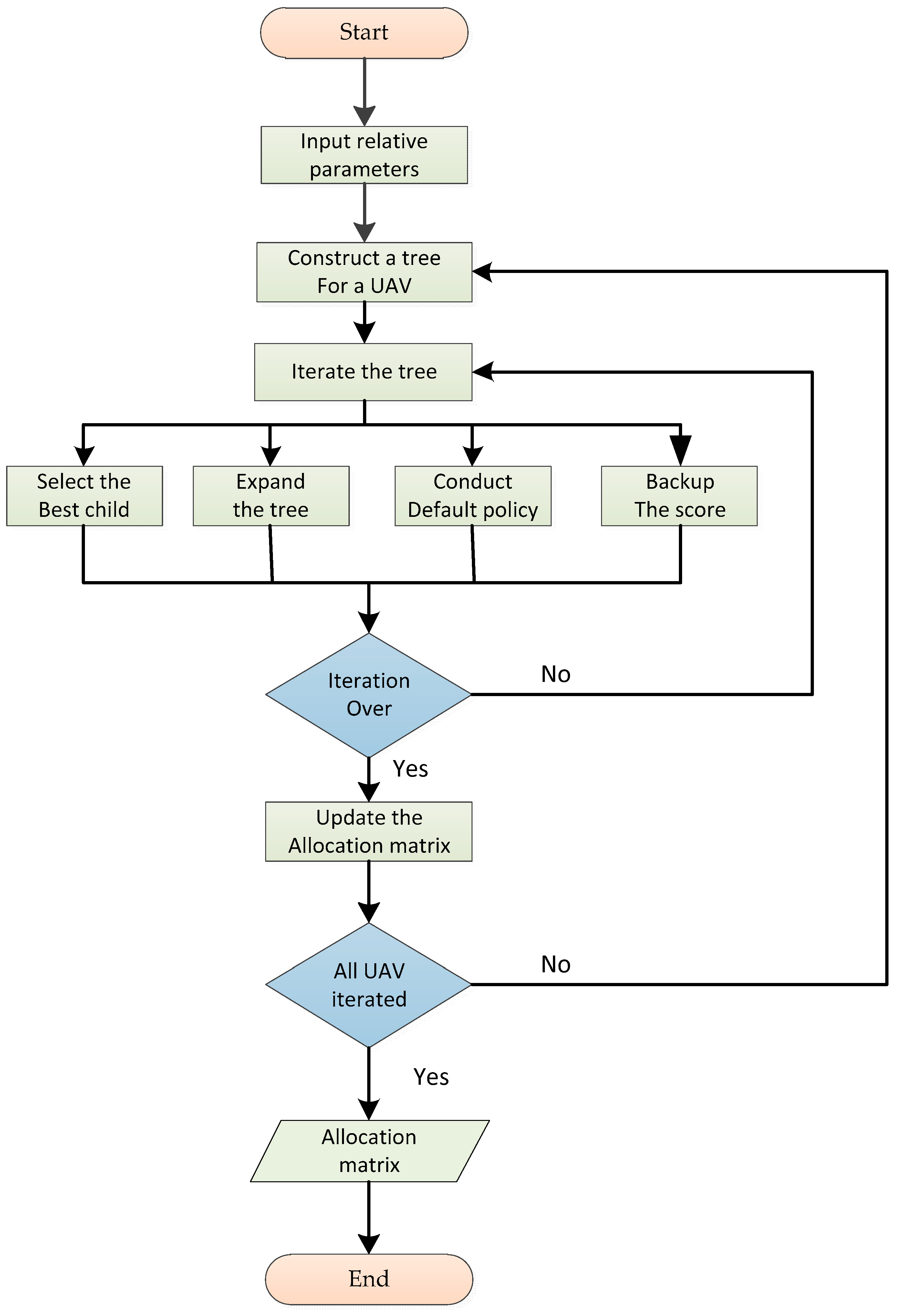
- Step 1: Input UAV number, choices number, threat values, UAV capacities, and iteration number. The UAV capacities can be seen as the energy constraints:where α is the energy coefficient.
- Step 2: Construct a new search tree and initialize the root node.
- Step 3: Iterate the search tree until the iteration number:
- (1)
- Select the best child layer by layer to find a leaf node;
- (2)
- Expand the tree from the leaf node;
- (3)
- Conduct the default policy;
- (4)
- Back up the score and update nodes’ attributes.
- Step 4: Update the allocation matrix.
- Step 5: Repeat steps 2–4 for all UAVs.
| Algorithm 2: MCTS task allocation |
| Input: UAVs number m, choices number n, threat values w, capacities e, IterNum, Output: Allocation matrix AlloMx 1: for to m do 2: Create a new tree with root node and initialize root: 3: , ; 4: for to IterNum do 5: node ; 6: ; 7: ; 8: while(True) 9: if p is leaf 10: break; 11: end if 12: find the best child of p and its index ind; 13: ; 14: ; 15: ; 16: end while 17: if 18: Expand the node p; 19: end if 20: Conduct the default policy for and get the score; 21: Back up the score; 22: end for 23: find the best child of root and its index ; 24: ; 25: end for 26: Return AlloMx; |
| The resulting 0–1 matrix obtained after the above steps is the optimal solution for task allocation; end |
3.2. Onboard Distributed Cooperative Trajectory Planning for Multiple UAVs
- Step 1:
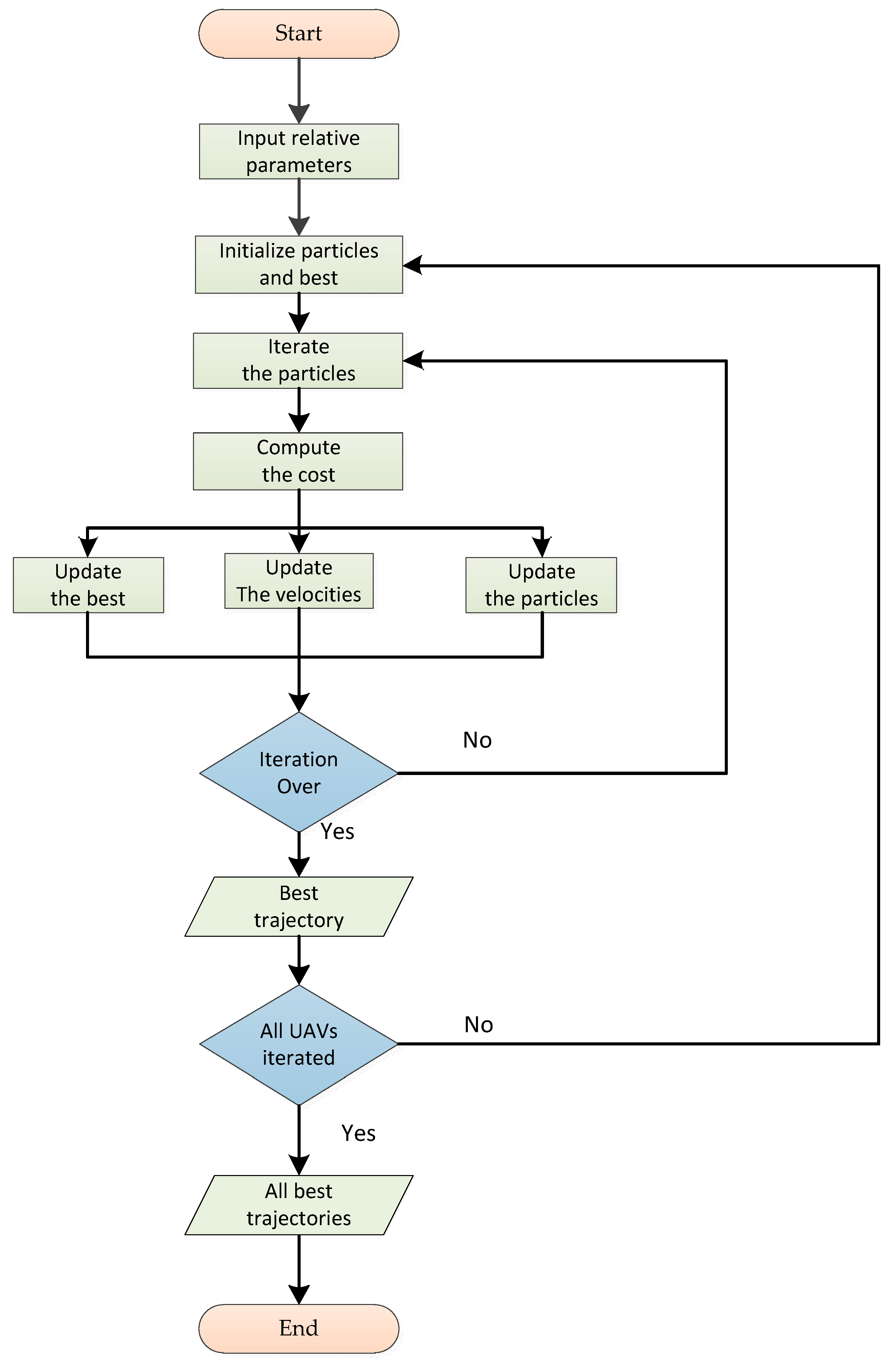
- Input particle number, point number, start position and target position, threat area center and radius, task allocation matrix, iteration number, UAV number, the safe distance, and the max velocity.
- Step 2:
- Initialize the particles and best values.
- Step 3:
- Iterate the particles until the iteration number:
- (1)
- Compute the cost of particles;
- (2)
- Update the best values;
- (3)
- Update the velocities;
- (4)
- Update the particles.
- Step 4:
- Generate one best trajectory.
- Step 5:
- Repeat steps 2–4 for all UAVs considering the safe distance between them.
| Algorithm 3: Onboard distributed cooperative trajectory planning |
| Input: particle number mp, point number n, start position PS and target position Pt, Threat area center Pc and radius r, AlloMx, IterNum, UAVs number m, the safe distance ds, Vmax, Output: best trajectories 1: ; 2: ; 3: ; 4: 5: for to IterNum do 6: for to mp do 7: Compute the of with decision AlloMx and Pc, r; 8: if cost is descending 9: ; 10: ; 11: end if 12: for to n do 13: Update according Formulas (5) and (8); 14: Adjust into ; 15: ; 16: end for 17: end for 18: end for 19: Here, we got the best trajectory for one UAV. 20: for to m do 21: Repeat 1~21 considering the safe distance ds; 22: end for 23: Return m best trajectories; |
| The resulting m best trajectories obtained after the above steps is the optimal solution for onboard distributed cooperative trajectory planning; end |
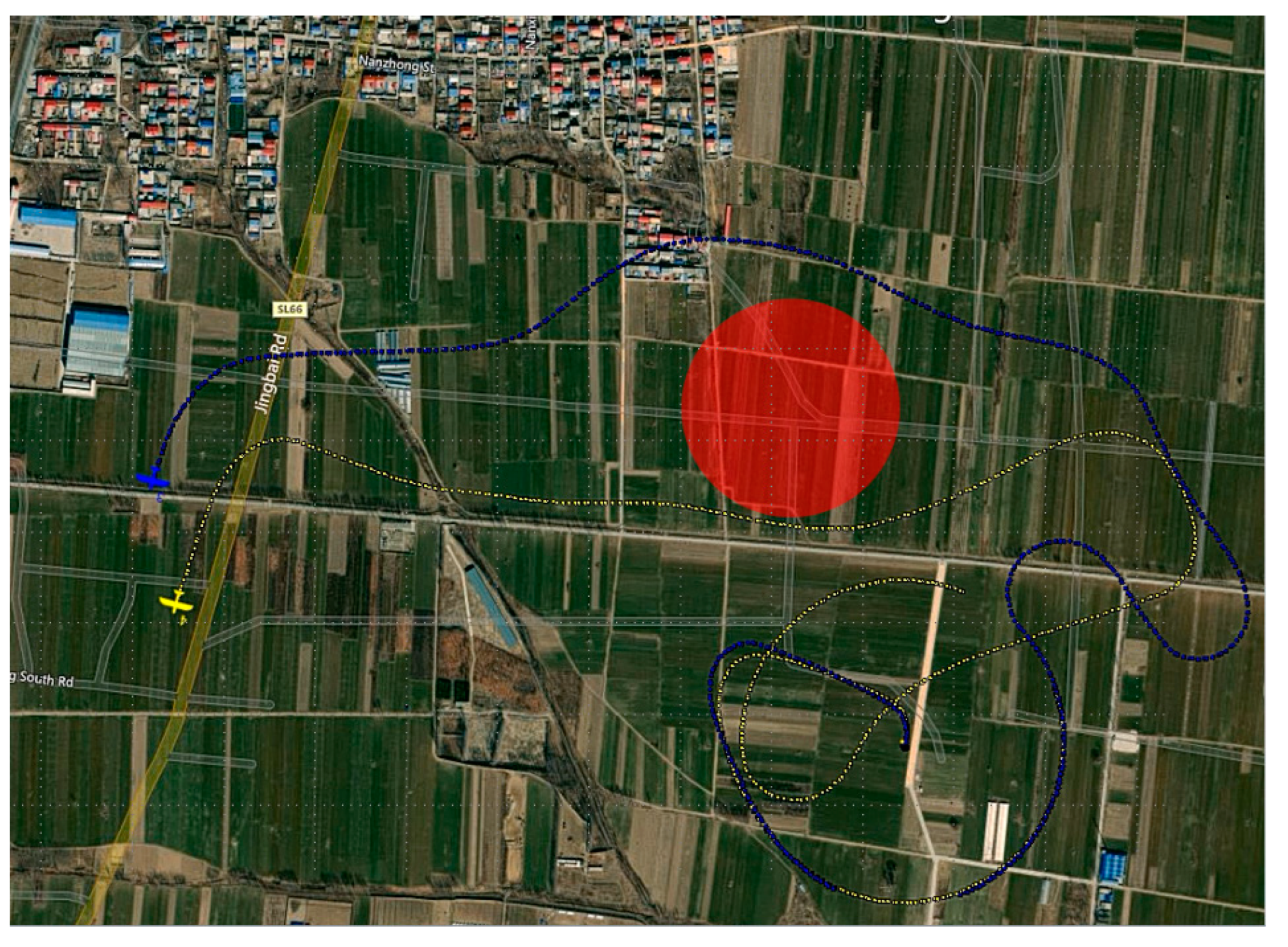
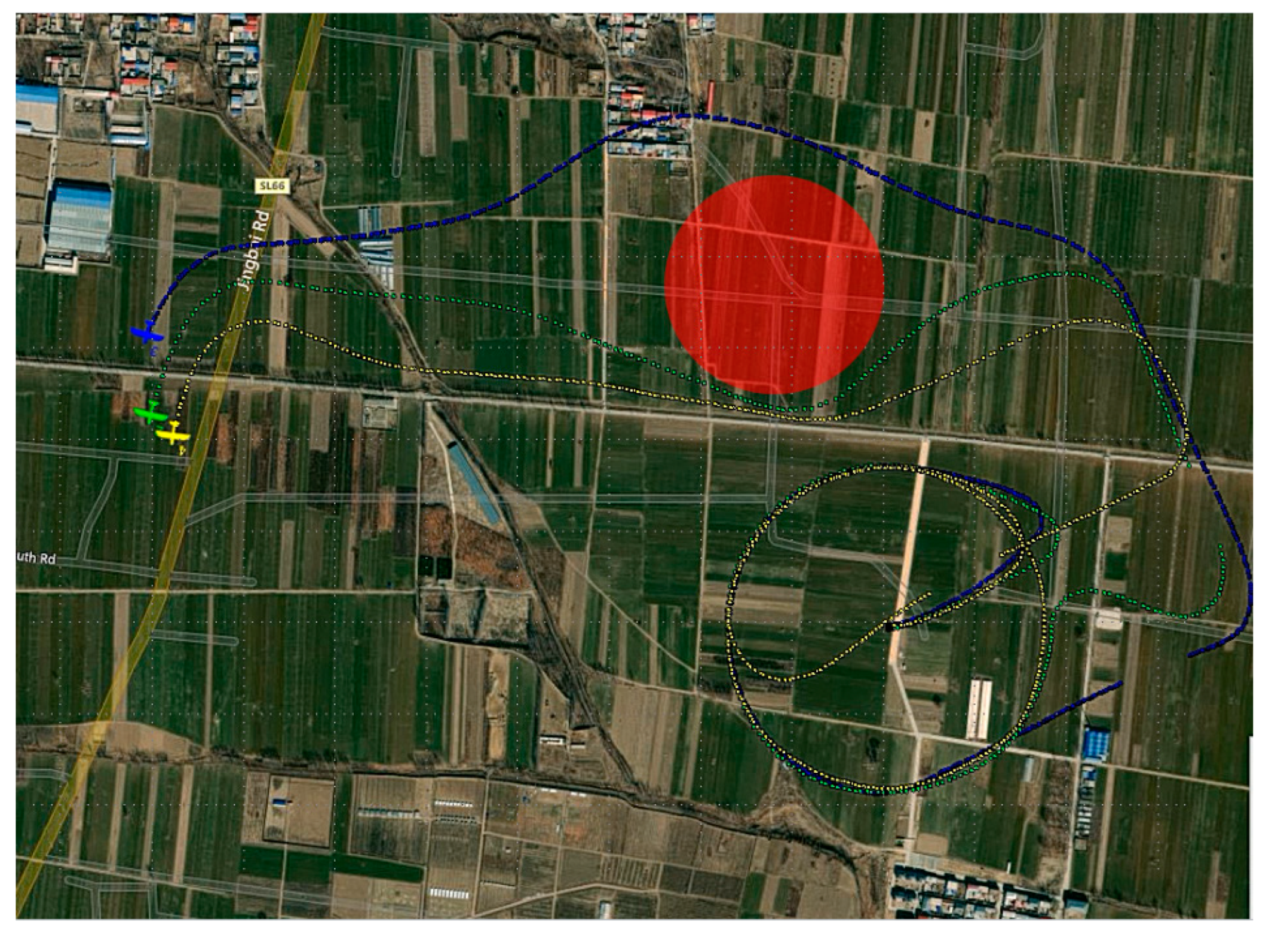
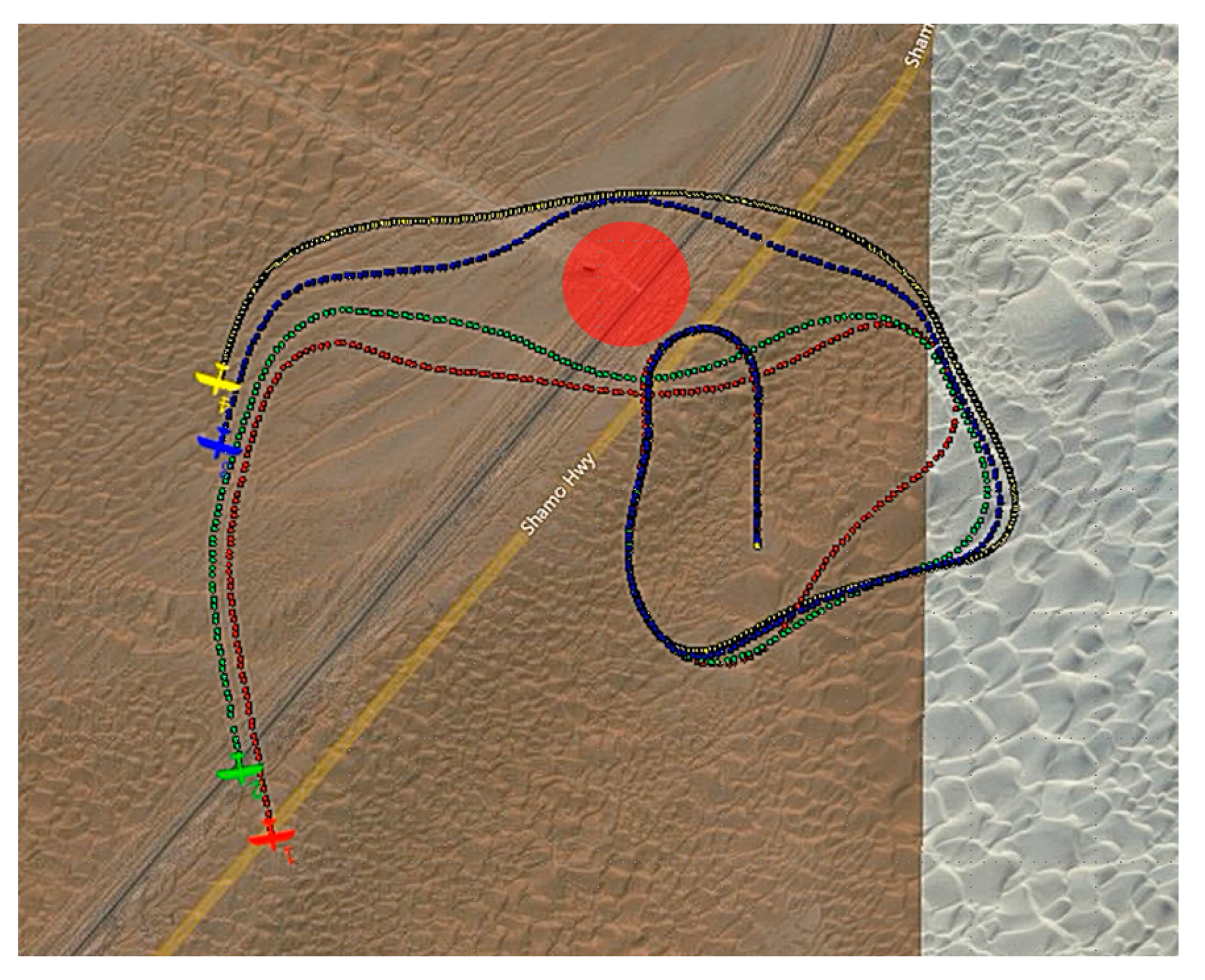
4. Experiments and Analysis
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Huang, R.; Zhou, H.; Liu, T.; Sheng, H. Multi-UAV collaboration to survey Tibetan antelopes in Hoh Xil. Drones 2022, 6, 196. [Google Scholar] [CrossRef]
- Bollard, B.; Doshi, A.; Gilbert, N.; Poirot, C.; Gillman, L. Drone technology for monitoring protected areas in remote and fragile environments. Drones 2022, 6, 42. [Google Scholar] [CrossRef]
- Ball, Z.; Odonkor, P.; Chowdhury, S. A swarm-intelligence approach to oil spill mapping using unmanned aerial vehicles. In Proceedings of the AIAA Information Systems—AIAA Infotech@ Aerospace, Grapevine, TX, USA, 9–13 January 2017. [Google Scholar]
- Alevizos, E.; Oikonomou, D.; Argyriou, A.V.; Alexakis, D.D. Fusion of drone-Based RGB and multi-spectral imagery for shallow water bathymetry inversion. Remote Sens. 2022, 14, 1127. [Google Scholar] [CrossRef]
- Tong, H.; Andi, T.; Huan, Z.; Dengwu, X.; Lei, X. Multiple UAV cooperative path planning based on LASSA method. Syst. Eng. Electron. 2022, 44, 233–241. [Google Scholar]
- Pannozzi, P.; Valavanis, K.P.; Rutherford, M.J.; Guglieri, G.; Scanavino, M.; Quagliotti, F. Urban monitoring of smart communities using UAS. In Proceedings of the 2019 International Conference on Unmanned Aircraft Systems, Atlanta, GA, USA, 11–14 June 2019. [Google Scholar]
- Ni, J.; Tang, G.; Mo, Z.; Cao, W.; Yang, S.X. An improved potential game theory based method for multi-UAV cooperative search. IEEE Access 2020, 8, 47787–47796. [Google Scholar] [CrossRef]
- Zhang, H.; Sun, M.; Li, Q.; Liu, L.; Liu, M.; Ji, Y. An empirical study of multi-scale object detection in high resolution UAV images. Neurocomputing 2021, 421, 173–182. [Google Scholar] [CrossRef]
- Lin, L.; Goodrich, M.A. UAV intelligent path planning for wilderness search and rescue. In Proceedings of the 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, St. Louis, MO, USA, 10–15 October 2009. [Google Scholar]
- Kohlbrecher, S.; Kunz, F.; Koert, D.; Rose, C.; Manns, P.; Daun, K.; Schubert, J.; Stumpf, A.; von Stryk, O. Towards highly reliable autonomy for urban search and rescue robots. In Proceedings of the Robot Soccer World Cup, Berlin/Heidelberg, Germany, 12 May 2015. [Google Scholar]
- McGuire, K.N.; DeWagter, C.; Tuyls, K.; Kappen, H.J.; de Croon, G.C. Minimal navigation solution for a swarm of tiny flying robots to explore an unknown environment. Sci. Robot. 2019, 4, 971. [Google Scholar] [CrossRef]
- Junlan, N.; Qingjie, Z.; Yanfen, W. UAV path planning based on weighted-Voronoi diagram. Flight Dyn. 2015, 33, 339–343. [Google Scholar]
- Chen, X.; Chen, X. The UAV dynamic path planning algorithm research based on Voronoi diagram. In Proceedings of the 26th Chinese Control and Decision Conference (2014 CCDC), Changsha, China, 31 May–2 June 2014. [Google Scholar]
- Singh, Y.; Sharma, S.; Sutton, R.; Hatton, D.C. Towards use of Dijkstra algorithm for optimal navigation of an unmanned surface vehicle in a real-time marine environment with results from artificial potential field. TransNav Int. J. Mar. Navig. Saf. Sea Transp. 2018, 12, 125–131. [Google Scholar] [CrossRef]
- Cheng, N.; Liu, Z.; Li, Y. Path planning algorithm of Dijkstra-based intelligent aircraft under multiple constraints. Xibei Gongye Daxue Xuebao/J. Northwest. Polytech. Univ. 2020, 38, 1284–1290. [Google Scholar] [CrossRef]
- Mandloi, D.; Arya, R.; Verma, A.K. Unmanned aerial vehicle path planning based on A * algorithm and its variants in 3d environment. Int. J. Syst. Assur. Eng. Manag. 2021, 12, 990–1000. [Google Scholar] [CrossRef]
- Zhou, J.; Yao, X. Multi-objective hybrid artificial bee colony algorithm enhanced with Lévy flight and self-adaption for cloud manufacturing service composition. Appl. Intell. 2017, 47, 721–742. [Google Scholar] [CrossRef]
- Xianqiang, L.I.; Rong, M.A.; Zhang, S. Improved design of ant colony algorithm and its application in path planning. Acta Aeronaut. Astronaut. Sin. 2020, 41, 724381. [Google Scholar]
- Jiang, T.; Li, J.; Huang, K. Longitudinal parameter identification of a small unmanned aerial vehicle based on modified particle swarm optimization. Chin. J. Aeronaut. 2015, 28, 865–873. [Google Scholar] [CrossRef]
- Liu, Y.; Zhang, X.; Guan, X.; Delahaye, D. Adaptive sensitivity decision based path planning algorithm for unmanned aerial vehicle with improved particle swarm optimization. Aerosp. Sci. Technol. 2016, 58, 92–102. [Google Scholar] [CrossRef]
- Wenzhao, S.; Naigang, C.; Bei, H.; Xiaogang, W.; Yuliang, B. Multiple UAV cooperative path planning based on PSO-HJ method. J. Chin. Inert. Technol. 2020, 28, 122–128. [Google Scholar]
- Zhang, J.; Sheng, H.; Chen, Q.; Zhou, H.; Yin, B.; Li, J.; Li, M. A Four-dimensional space-time automatic obstacle avoidance trajectory planning method for multi-UAV cooperative formation flight. Drones 2022, 6, 192. [Google Scholar] [CrossRef]
- Chen, Y.B.; Luo, G.C.; Mei, Y.S.; Yu, J.Q.; Su, X.L. UAV path planning using artificial potential field method updated by optimal control theory. Int. J. Syst. Sci. 2016, 47, 1407–1420. [Google Scholar] [CrossRef]
- Sudhakara, P.; Ganapathy, V.; Priyadharshini, B.; Sundaran, K. Obstacle avoidance and navigation planning of a wheeled mobile robot using amended artificial potential field method. Procedia Comput. Sci. 2018, 133, 998–1004. [Google Scholar] [CrossRef]
- Khamis, A.; Hussein, A.; Elmogy, A. Multi-robot task allocation: A review of the state-of-the-art. Coop. Robot. Sens. Netw. 2015, 8, 31–51. [Google Scholar]
- Gao, G.Q.; Xin, B. A-STC: Auction-based spanning tree coverage algorithm for motion planning of cooperative robots. Front. Inf.Technol. Electron. Eng. 2019, 20, 18–31. [Google Scholar] [CrossRef]
- Khan, A.S.; Chen, G.; Rahulamathavan, Y.; Zheng, G.; Assadhan, B.; Lambotharan, S. Trusted UAV network coverage using blockchain, machine learning, and auction mechanisms. IEEE Access 2020, 8, 118219–118234. [Google Scholar] [CrossRef]
- Sun, Y.; Tan, Q.; Yan, C.; Chang, Y.; Xiang, X.; Zhou, H. Multi-UAV Coverage through Two-Step Auction in Dynamic Environments. Drones 2022, 6, 153. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Top Channel | Bottom Channel | |
|---|---|---|
| UAV1 | 1 | 0 |
| UAV2 | 0 | 1 |
| Top Channel | Bottom Channel | |
|---|---|---|
| UAV1 | 1 | 0 |
| UAV2 | 0 | 1 |
| UAV3 | 0 | 1 |
| Top Channel | Bottom Channel | |
|---|---|---|
| UAV1 | 1 | 0 |
| UAV2 | 1 | 0 |
| UAV3 | 0 | 1 |
| UAV4 | 0 | 1 |
| Distributed Framework | Centralized Framework | |
|---|---|---|
| 2 UAVs | 0.72s | 2.2s |
| 3 UAVs | 0.73s | 3.1s |
| 4 UAVs | 0.73s | 4.2s |
| Total Distances | |
|---|---|
| 2 UAVs | 3.2 Km |
| 3 UAVs | 4.9 Km |
| 4 UAVs | 6.6 Km |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, K.; Hu, R.; Yao, Z.; Wang, H. Onboard Distributed Trajectory Planning through Intelligent Search for Multi-UAV Cooperative Flight. Drones 2023, 7, 16. https://doi.org/10.3390/drones7010016
Lu K, Hu R, Yao Z, Wang H. Onboard Distributed Trajectory Planning through Intelligent Search for Multi-UAV Cooperative Flight. Drones. 2023; 7(1):16. https://doi.org/10.3390/drones7010016
Chicago/Turabian StyleLu, Kunfeng, Ruiguang Hu, Zheng Yao, and Huixia Wang. 2023. "Onboard Distributed Trajectory Planning through Intelligent Search for Multi-UAV Cooperative Flight" Drones 7, no. 1: 16. https://doi.org/10.3390/drones7010016
APA StyleLu, K., Hu, R., Yao, Z., & Wang, H. (2023). Onboard Distributed Trajectory Planning through Intelligent Search for Multi-UAV Cooperative Flight. Drones, 7(1), 16. https://doi.org/10.3390/drones7010016