
Persistent Charging System for Crazyflie Platform

 ,
,  , ,
, ,  , and
, and 
Abstract
:1. Introduction
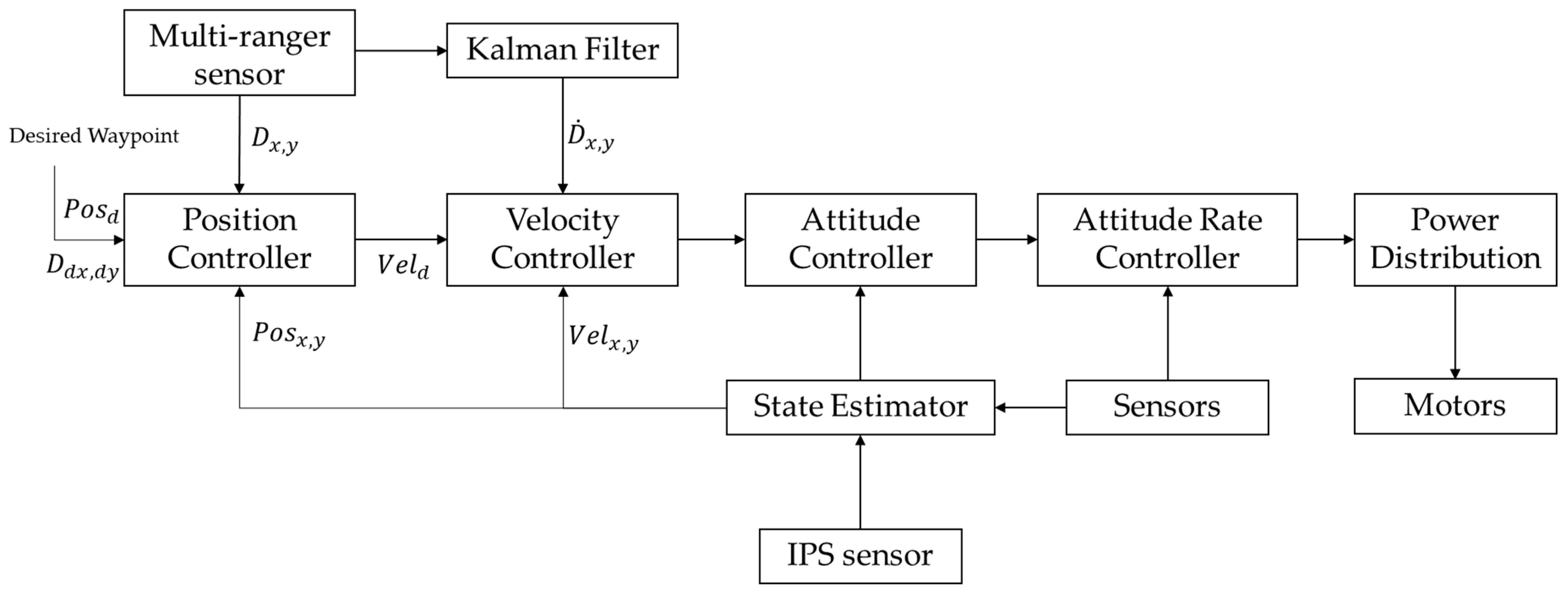
- Modifies the open-source software of Crazyflie drones, and a Kalman filter is applied to estimate the velocity from the relative position provided by using a multi-ranger sensor.
- A sequential charging strategy is proposed for autonomous persistent drone-charging of three quadcopters.
- Different to vision-based control techniques in previous studies in that a single drone can land precisely; this work can allow drones to land accurately with persistent feature.
2. Methodology
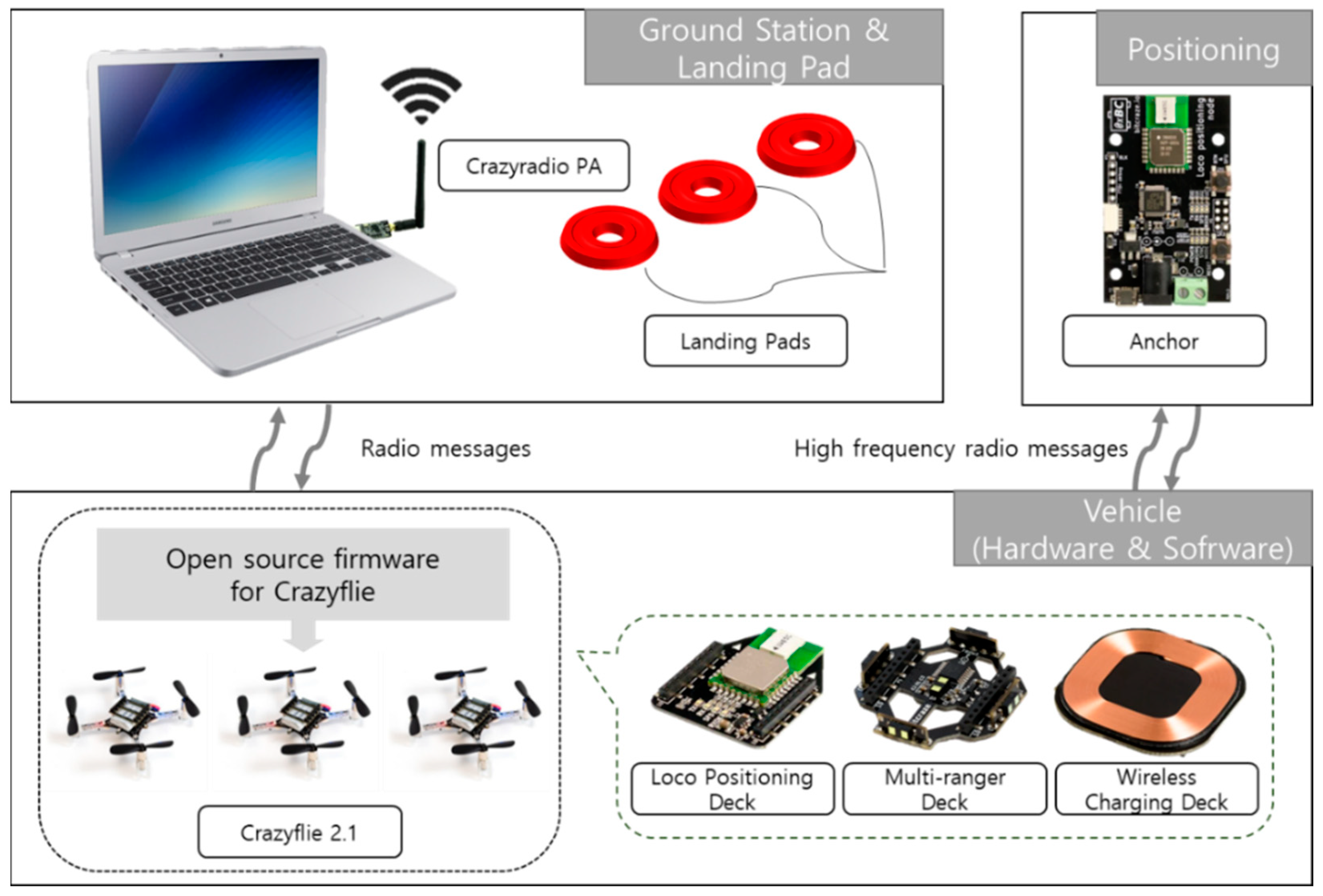
2.1. UAV Platform
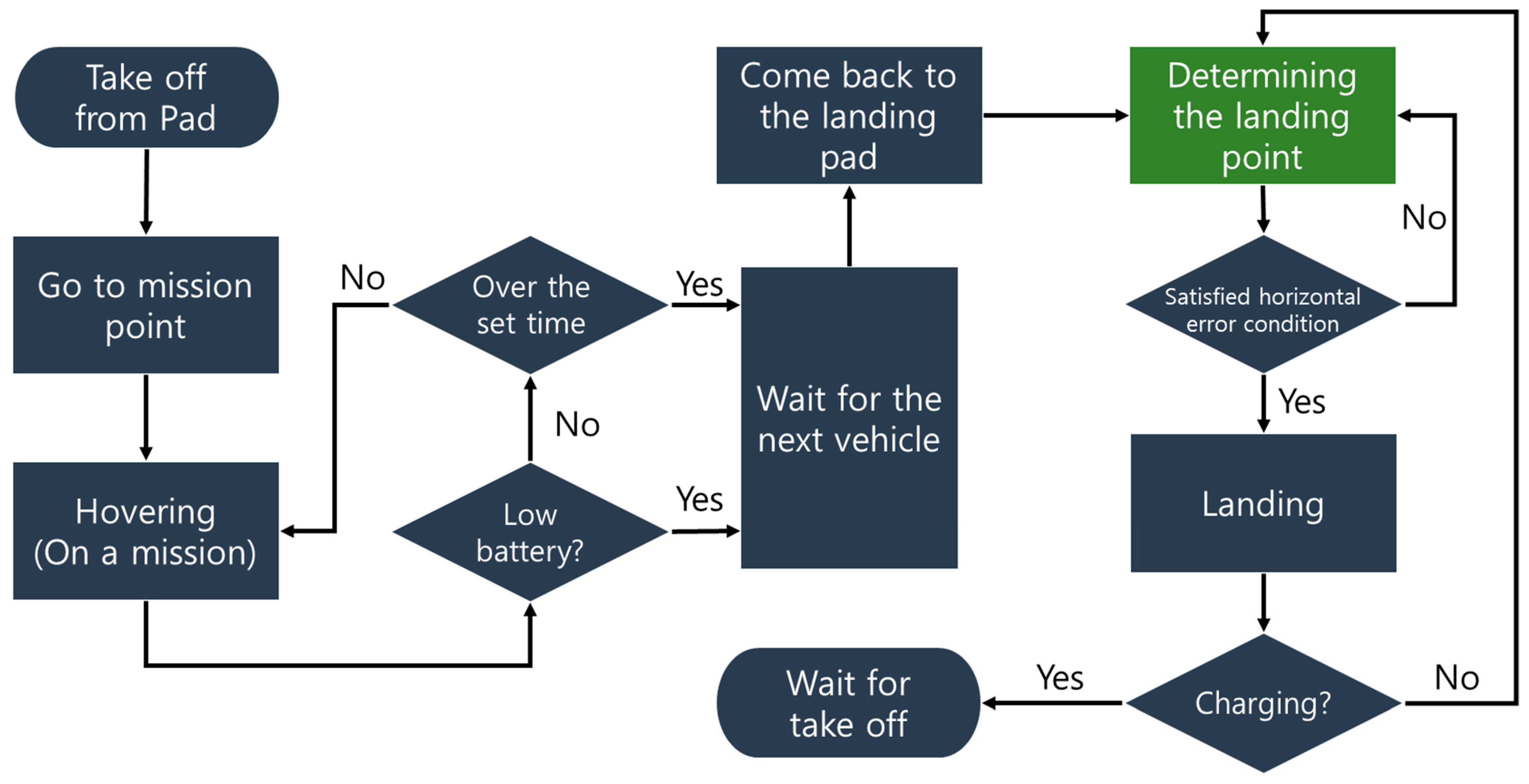
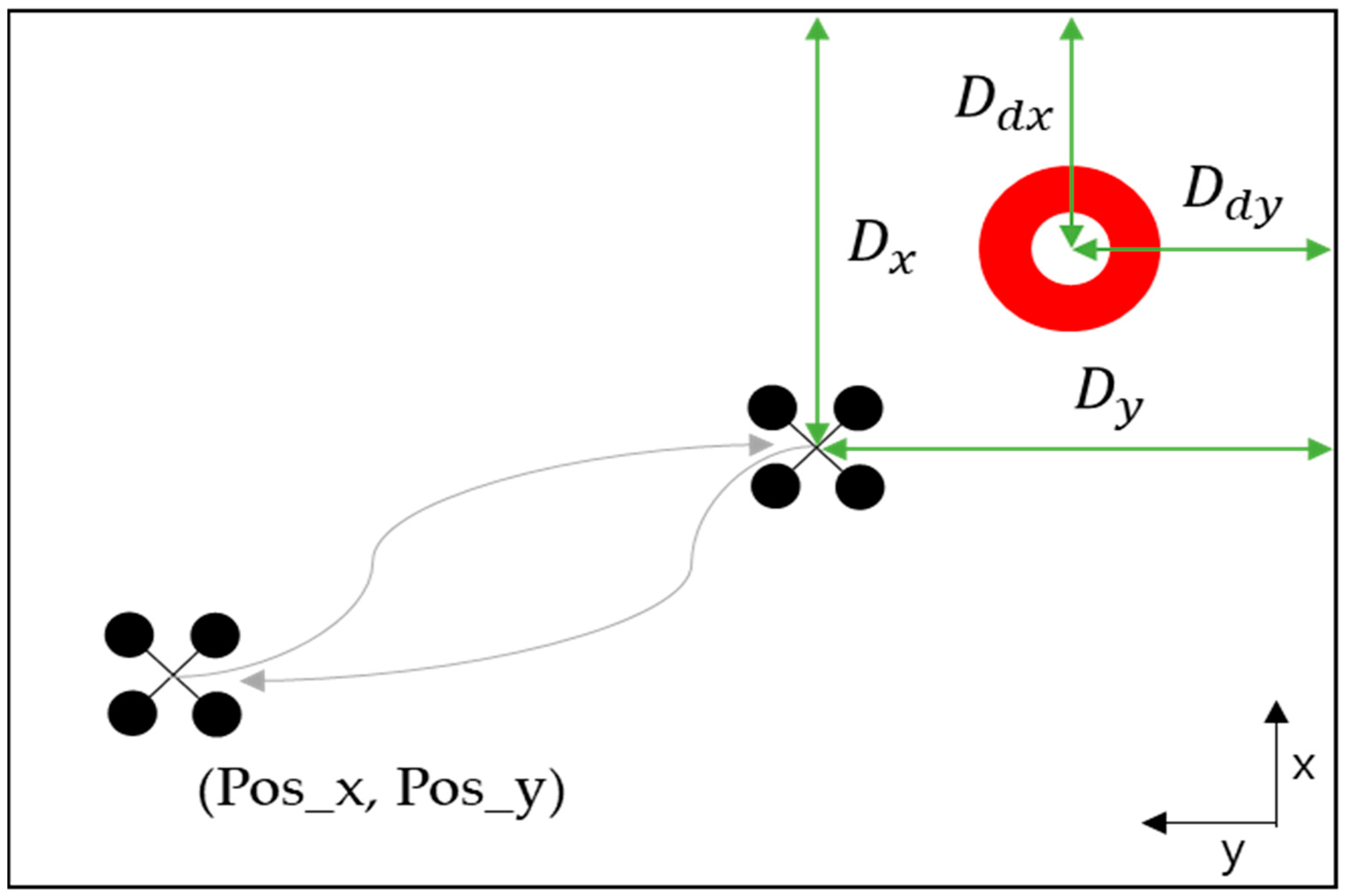
2.2. Charging State Machine Strategy and Control Scheme
3. Experimental Setup
3.1. UAV Platform Description
3.1.1. Sensors
- Loco positioning system (indoor positioning system).
- Multi-ranger deck (5-way distance sensor).
- Wireless charging deck.
3.1.2. System Configuration
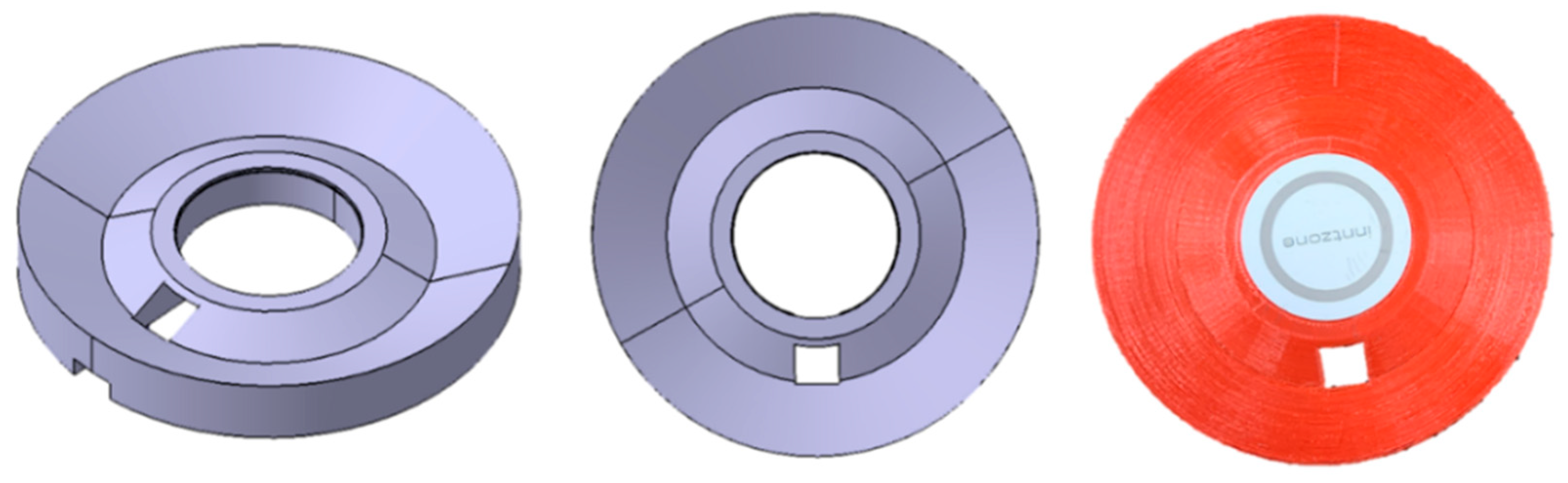
3.2. Wireless Charging Setup
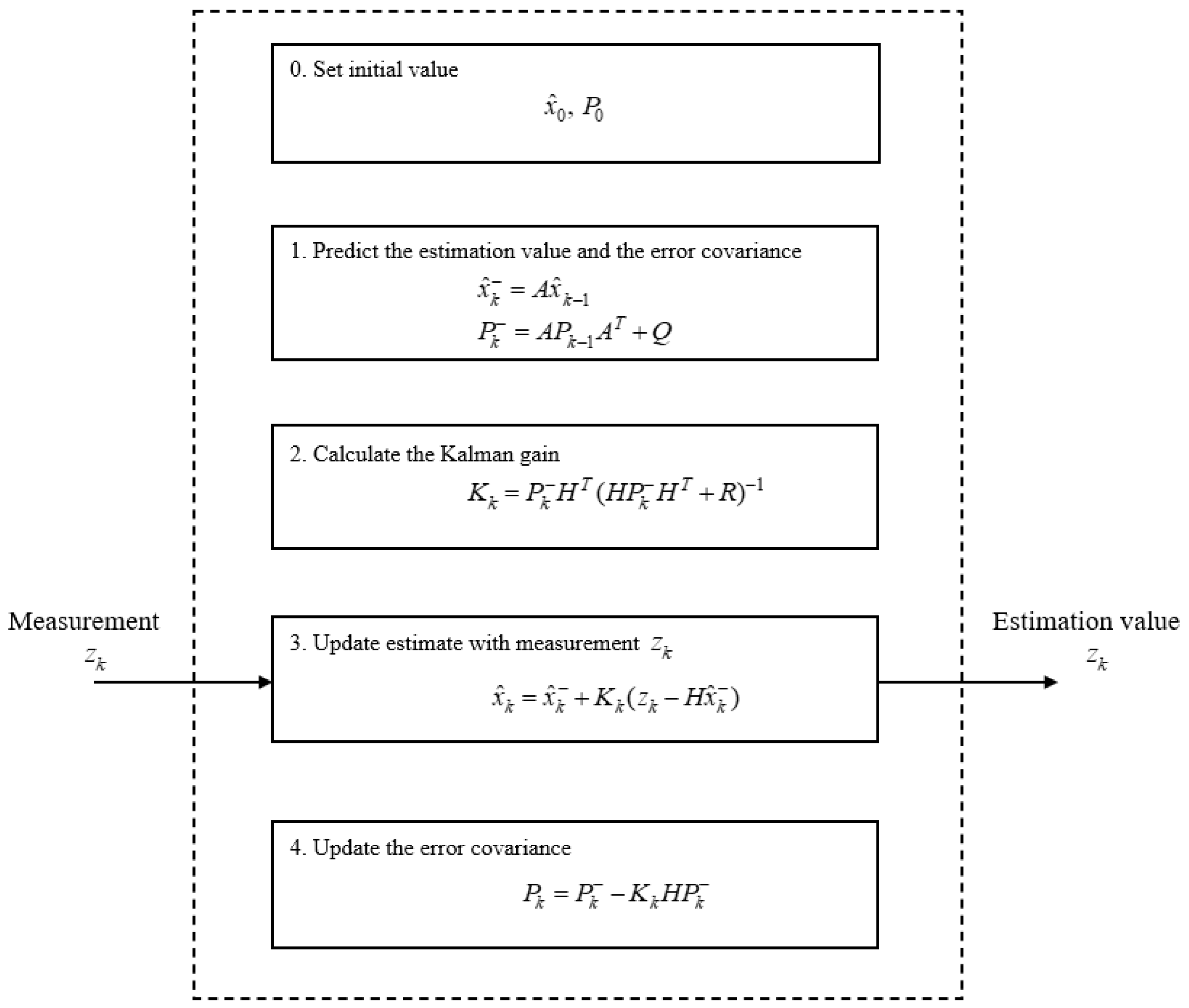
3.3. Kalman Filter for Landing Phase
4. Results
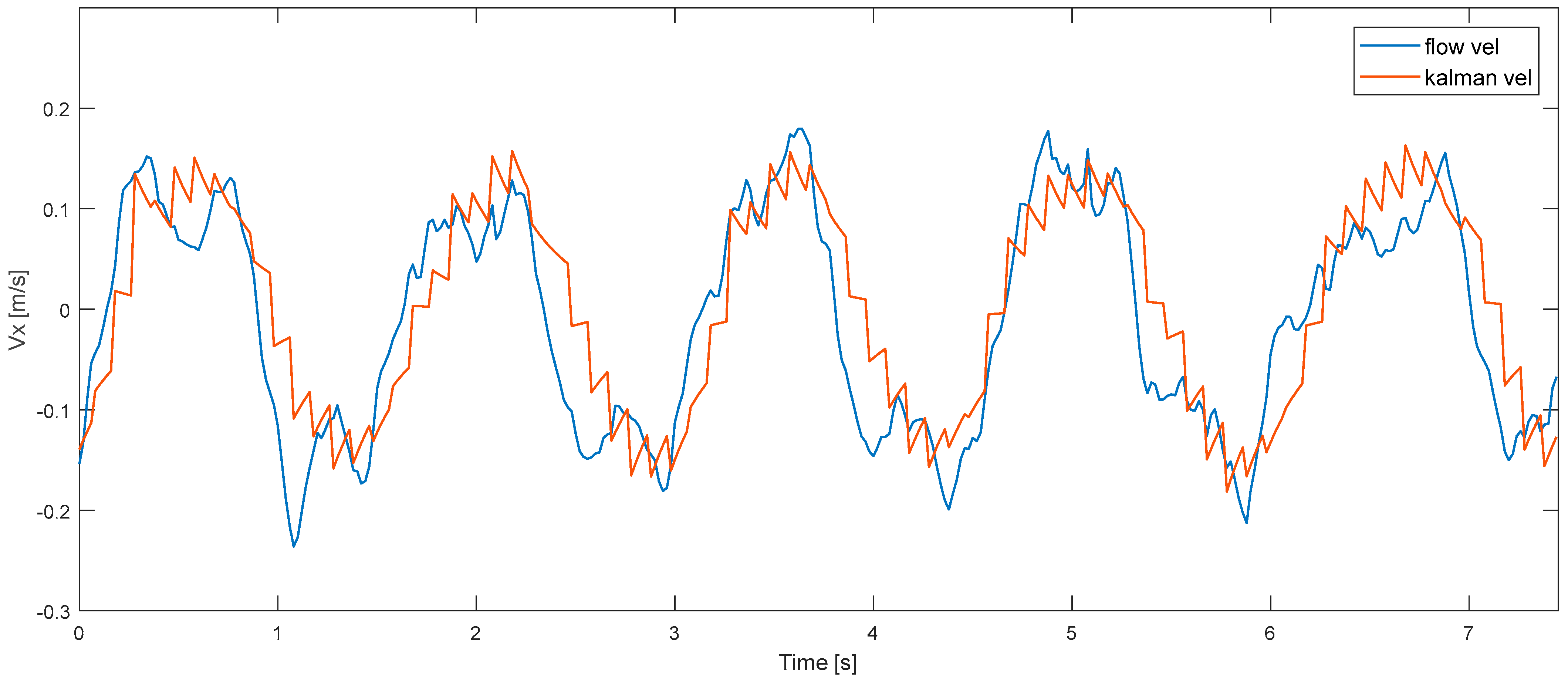
4.1. Velocity Estimation from Position
4.2. Trajectory Tracking and Landing Accuracy Performance
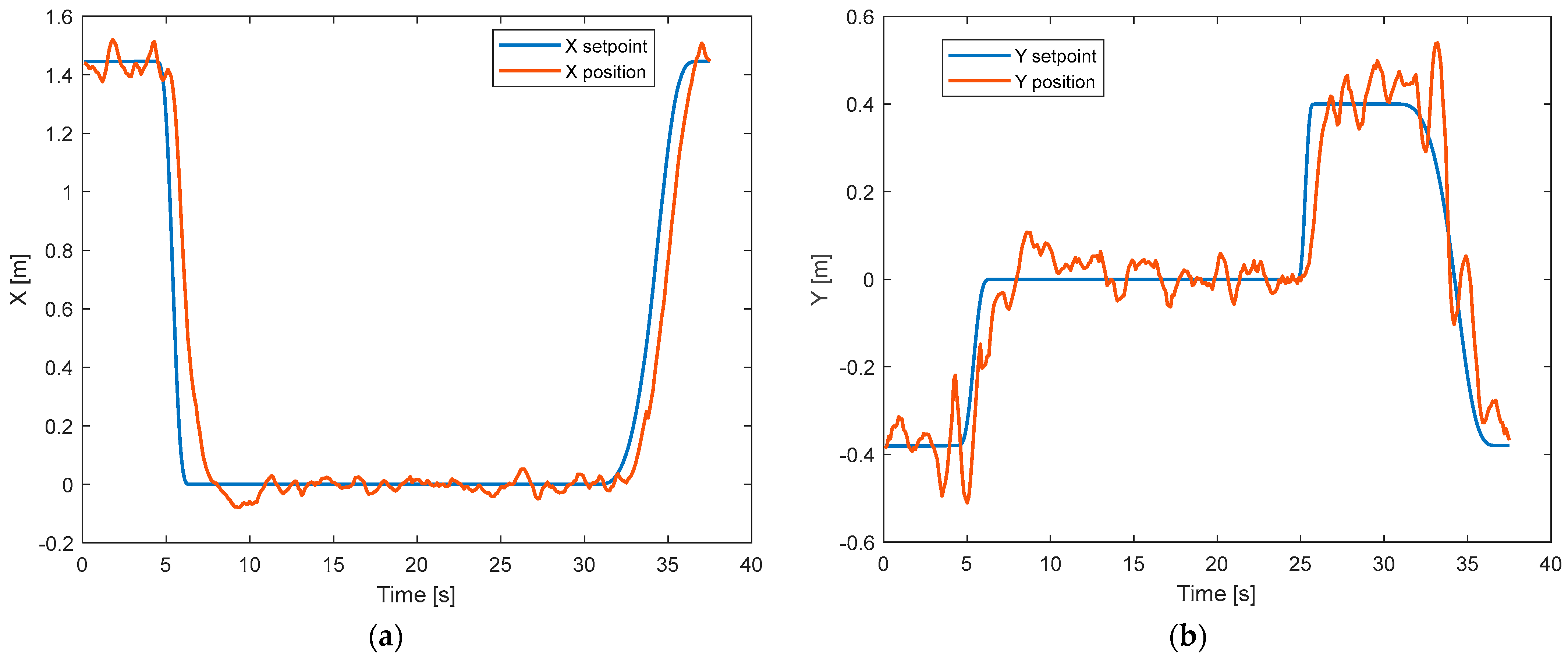
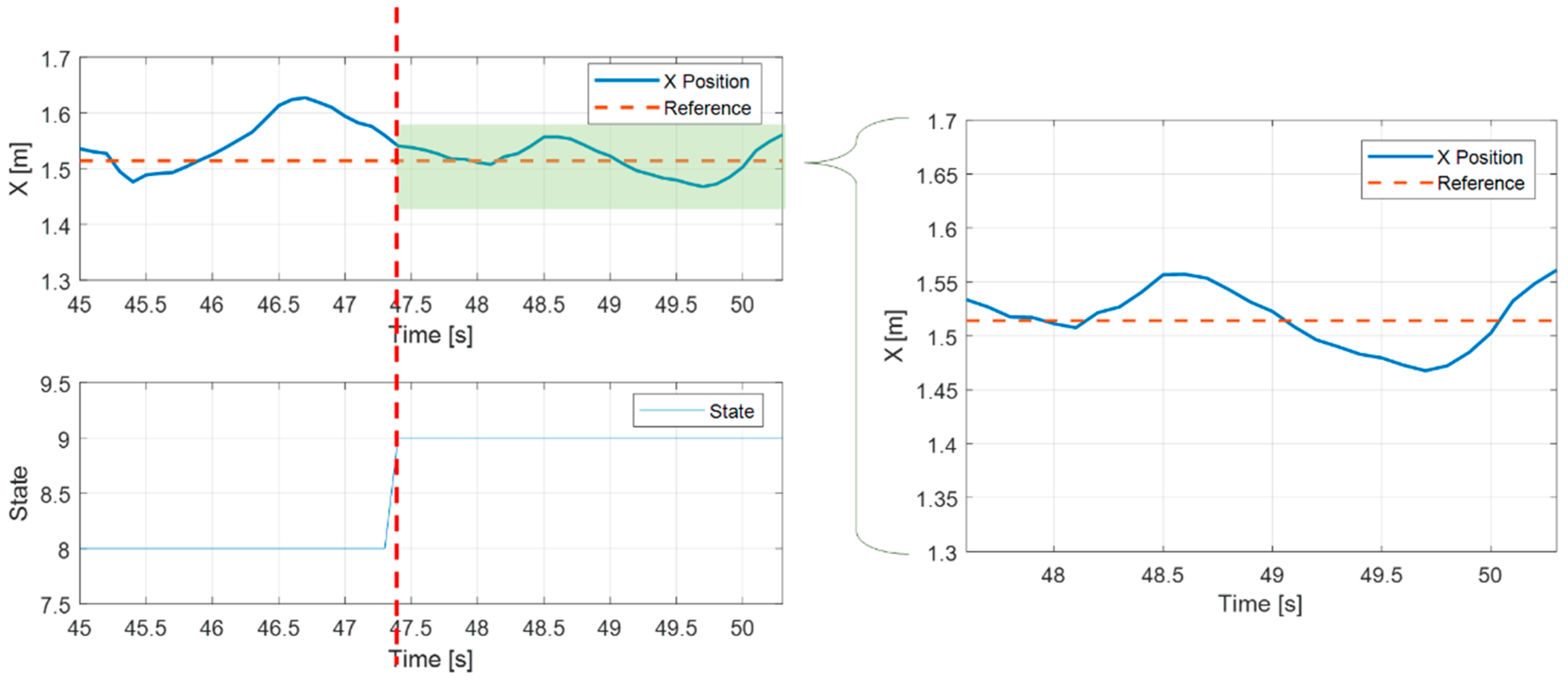
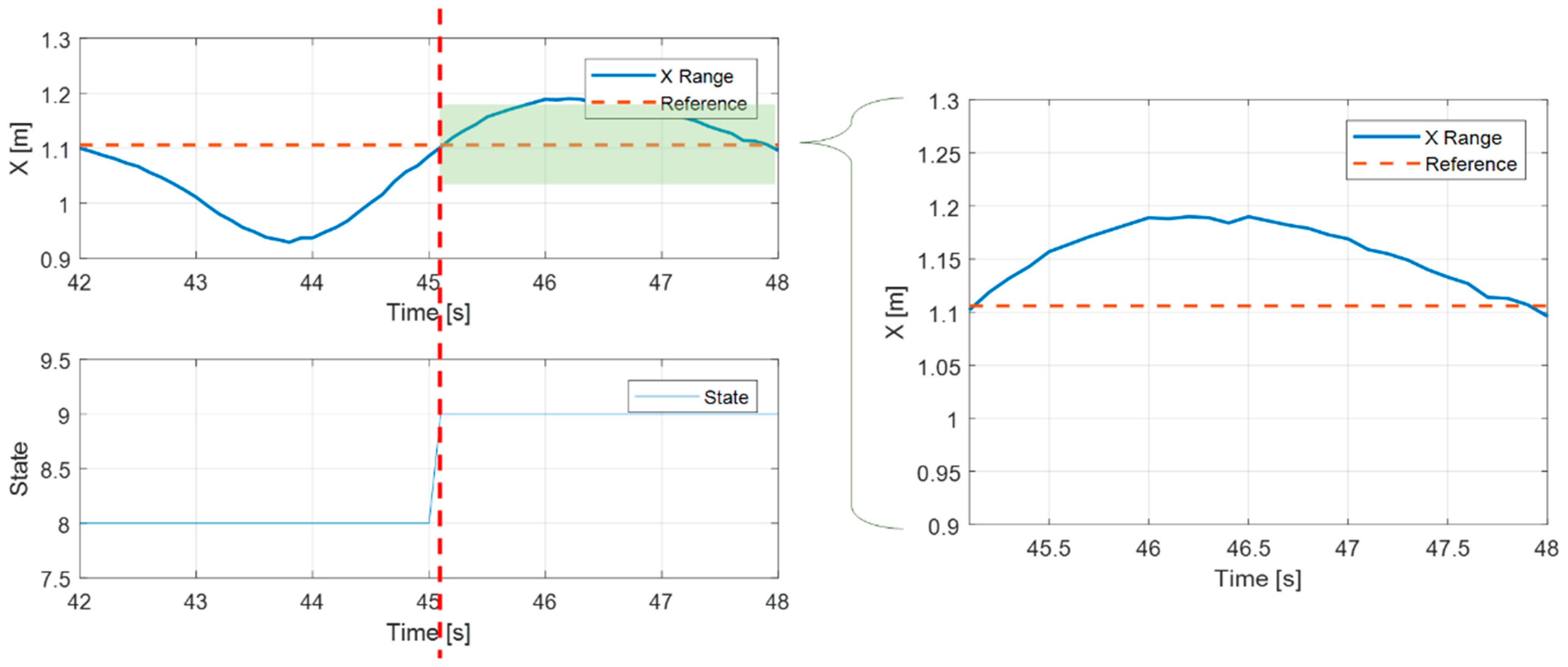
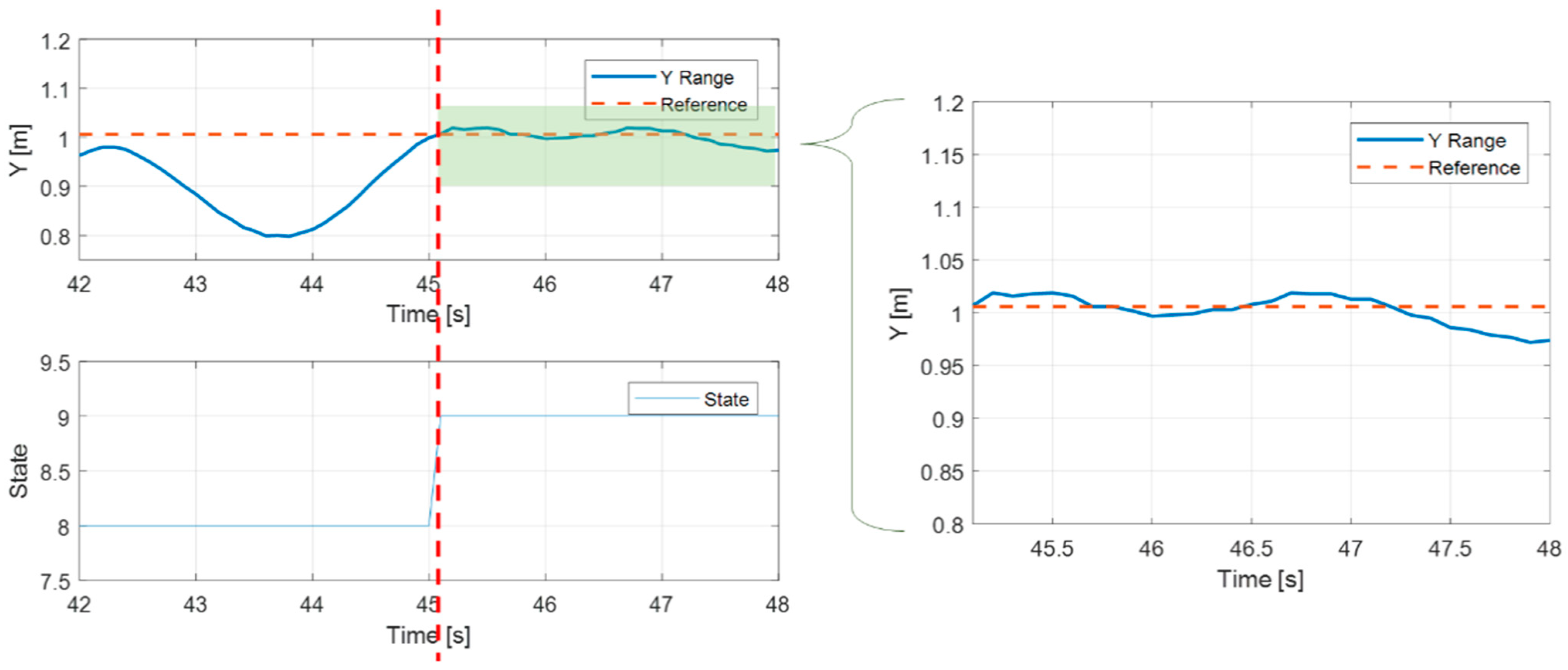
4.2.1. Trajectory Tracking Performance
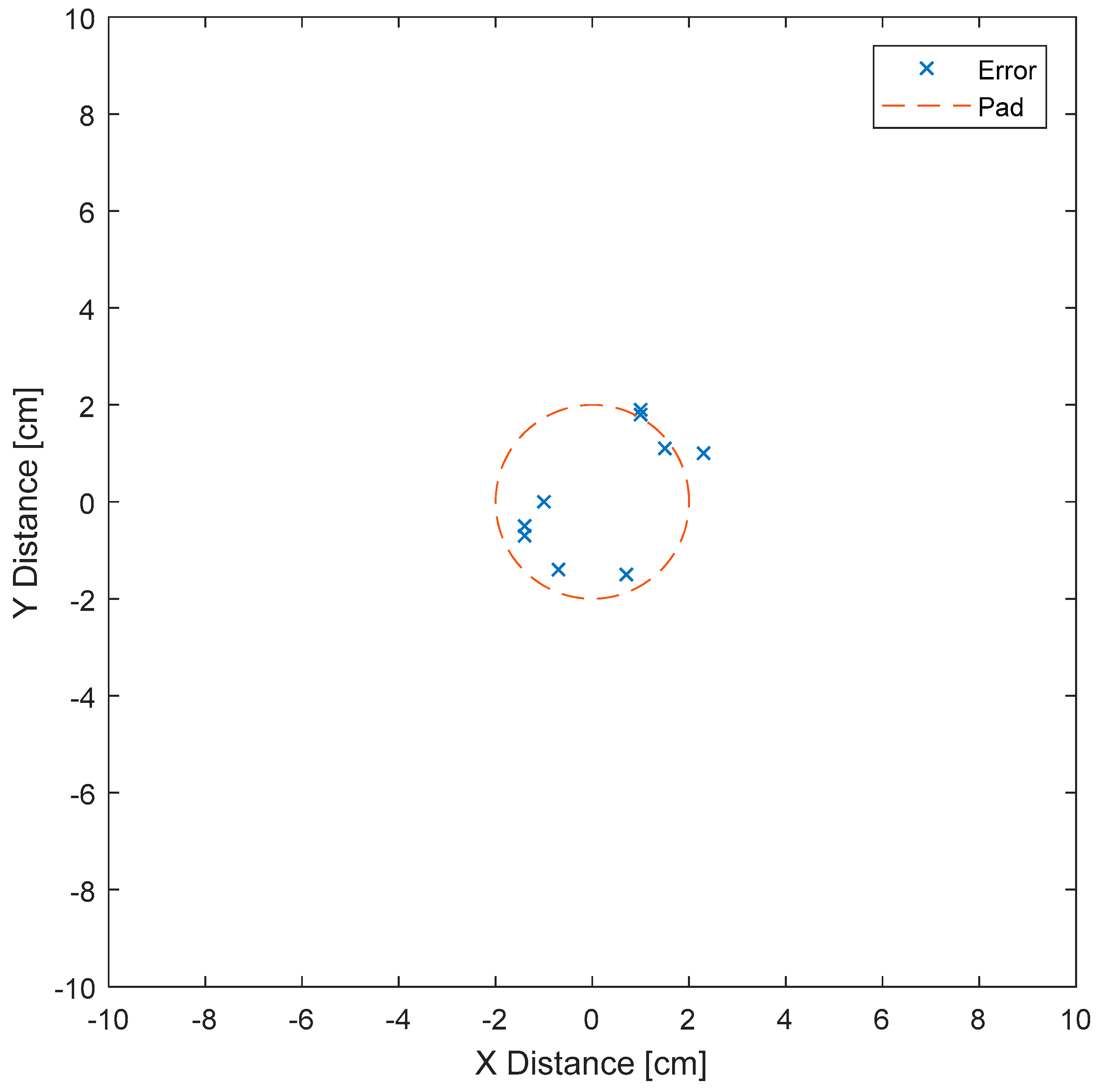
4.2.2. Landing Accuracy Performance
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhao, W.; Go, T.H. Quadcopter Formation Flight Control Combining MPC and Robust Feedback Linearization. J. Frankl. Inst. 2014, 351, 1335–1355. [Google Scholar] [CrossRef]
- Mahmood, A.; Kim, Y. Decentrailized Formation Flight Control of Quadcopters Using Robust Feedback Linearization. J. Frankl. Inst. 2017, 354, 852–871. [Google Scholar] [CrossRef]
- Paredes, J.A.; Acevedo, J.; Mogrovejo, H.; Villalta, J.; Furukawa, R. Quadcopter Design for Medicine Transportation in the Peruvian Amazon Rainforest. In 2016 IEEE XXIII International Congress on Electronics, Electrical Engineering and Computing (INTERCON); IEEE: Piscataway, NJ, USA, 2017. [Google Scholar] [CrossRef]
- Nguyen, N.P.; Mung, N.X.; Ha, L.N.N.T.; Huynh, T.T.; Hong, S.K. Finite-Time Attitude Fault Tolerant Control of Quadcopter System via Neural Networks. Mathematics 2020, 8, 1541. [Google Scholar] [CrossRef]
- Nguyen, N.P.; Hong, S.K. Active Fault-Tolerant Control of a Quadcopter against Time-Varying Actuator Faults and Saturations Using Sliding Mode Backstepping Approach. Appl. Sci. 2019, 9, 4010. [Google Scholar] [CrossRef]
- Haque, M.R.; Muhammad, M.; Swarnaker, D.; Arifuzzaman, M. Autonomous Quadcopter for Product Home Delivery. In Proceedings of the 2014 International Conference on Electrical Engineering and Information&Communication Technology, Dhaka, Bangladesh, 10–12 April 2014; pp. 2–6. [Google Scholar] [CrossRef]
- Xuan-Mung, N.; Hong, S.K.; Nguyen, N.P.; Ha, L.N.N.T.; Le, T.L. Autonomous Quadcopter Precision Landing onto a Heaving Platform: New Method and Experiment. IEEE Access 2020, 8, 167192–167202. [Google Scholar] [CrossRef]
- Shakernia, O.; Ma, Y.; Koo, T.J.; Sastry, S. Landing an Unmanned Air Vehicle: Vision Based Motion Estimation and Nonlinear Control. Asian J. Control 2008, 1, 128–145. [Google Scholar] [CrossRef]
- Liu, F.; Shan, J.; Xiong, B.; Fang, Z. A Real-Time and Multi-Sensor-Based Landing Area Recognition System for UAVs. Drones 2022, 6, 118. [Google Scholar] [CrossRef]
- Safadinho, D.; Ramos, J.; Ribeiro, R.; Filipe, V.; Barroso, J.; Pereira, A. UAV Landing Using Computer Vision Techniques for Human Detection. Sensors 2020, 20, 613. [Google Scholar] [CrossRef]
- Ononiwu, G.; Okoye, A.; Onojo, J.; Onuekwusi, N. Design and Implementation of a Real Time Wireless Quadcopter for Rescue Operations. Am. J. Eng. Res. 2016, 5, 130–138. [Google Scholar]
- Eid, S.E.; Sham Dol, S. Design and Development of Lightweight-High Endurance Unmanned Aerial Vehicle for Offshore Search and Rescue Operation. In Proceedings of the 2019 Advances in Science and Engineering Technology International Conference, Dubai, United Arab Emirates, 26 March–10 April 2019. [Google Scholar] [CrossRef]
- Chen, J.; Li, S.; Chen, S.; He, S.; Shi, Z. Q-Charge: A Quadcopter-Based Wireless Charging Platform for Large-Scale Sensing Applications. IEEE Netw. 2017, 31, 56–61. [Google Scholar] [CrossRef]
- Rohan, A.; Rabah, M.; Asghar, F.; Talha, M.; Kim, S.H. Advanced Drone Battery Charging System. J. Electr. Eng. Technol. 2019, 14, 1395–1405. [Google Scholar] [CrossRef]
- Silverman, M.; Jung, B. Staying Alive Longer: Autonomous Robot Recharging Put to the Test. USC Cent. Robot. Embed. Syst. Tech. Rep. 2003, 3, CRES-03-015. [Google Scholar]
- Valenti, M.; Dale, D.; How, J.P.; De Farias, D.P.; Vian, J. Mission Health Management for 24/7 Persistent Surveillance Operations. Collect. Tech. Pap.—AIAA Guid. Navig. Control Conf. 2007, 2, 1767–1784. [Google Scholar] [CrossRef]
- Tansuriyong, S.; Kyan, M.; Numata, K.; Taira, S.; Anezaki, T. Verification Experiment for Drone Charging Station Using RTK-GPS. In 2017 International Conference on Intelligent Informatics and Biomedical Sciences (ICIIBMS); IEEE: Piscataway, NJ, USA, 2017; pp. 229–232. [Google Scholar]
- Rabah, M.; Rohan, A.; Mohamed, S.A.S.; Kim, S.H. Autonomous Moving Target-Tracking for a UAV Quadcopter Based on Fuzzy-PI. IEEE Access 2019, 7, 38407–38419. [Google Scholar] [CrossRef]
- Tzoumanikas, D.; Li, W.; Grimm, M.; Zhang, K.; Kovac, M.; Leutenegger, S. Fully Autonomous Micro Air Vehicle Flight and Landing on a Moving Target Using Visual–Inertial Estimation and Model-Predictive Control. J. Field Robot. 2019, 36, 49–77. [Google Scholar] [CrossRef]
- Almeshal, A.M.; Alenezi, M.R. A Vision-Based Neural Network Controller for the Autonomous Landing of a Quadrotor on Moving Targets. Robotics 2018, 7, 71. [Google Scholar] [CrossRef]
- Qi, Y.; Jiang, J.; Wu, J.; Wang, J.; Wang, C.; Shan, J. Autonomous Landing Solution of Low-Cost Quadrotor on a Moving Platform. Robot. Auton. Syst. 2019, 119, 64–76. [Google Scholar] [CrossRef]
- Ho, H.W.; De Croon, G.C.H.E.; Van Kampen, E.; Chu, Q.P.; Mulder, M. Adaptive Gain Control Strategy for Constant Optical Flow Divergence Landing. IEEE Trans. Robot. 2018, 34, 508–516. [Google Scholar] [CrossRef]
- Borowczyk, A.; Nguyen, D.T.; Van Nguyen, A.P.; Nguyen, D.Q.; Saussié, D.; Le Ny, J. Autonomous Landing of a Quadcopter on a High-Speed Ground Vehicle. J. Guid. Control. Dyn. 2017, 40, 2373–2380. [Google Scholar] [CrossRef]
- Kurs, A.; Karalis, A.; Moffatt, R.; Joannopoulos, J.D.; Fisher, P.; Soljačić, M. Wireless Power Transfer via Strongly Coupled Magnetic Resonances. Science 2007, 317, 83–86. [Google Scholar] [CrossRef]
- Campi, T.; Cruciani, S.; Maradei, F.; Feliziani, M. Near-Field Reduction in a Wireless Power Transfer System Using LCC Compensation. IEEE Trans. Electromagn. Compat. 2017, 59, 686–694. [Google Scholar] [CrossRef]
- Campi, T.; Cruciani, S.; De Santis, V.; Feliziani, M. EMF Safety and Thermal Aspects in a Pacemaker Equipped with a Wireless Power Transfer System Working at Low Frequency. IEEE Trans. Microw. Theory Tech. 2016, 64, 375–382. [Google Scholar] [CrossRef]
- Feliziani, M.; Campi, T.; Cruciani, S.; Maradei, F.; Grasselli, U.; Macellari, M.; Schirone, L. Robust LCC Compensation in Wireless Power Transfer with Variable Coupling Factor Due to Coil Misalignment. In Proceedings of the 2015 IEEE 15th International Conference on Environment and Electrical Engineering (EEEIC), Rome, Italy, 10–13 June 2015; pp. 1181–1186. [Google Scholar] [CrossRef]
- Campi, T.; Cruciani, S.; Feliziani, M.; Maradei, F. High Efficiency and Lightweight Wireless Charging System for Drone Batteries. In Proceedings of the 2017 AEIT International Annual Conference, Cagliari, Italy, 20–22 September 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Quaglia, G.; Visconte, C.; Scimmi, L.S.; Melchiorre, M.; Cavallone, P.; Pastorelli, S. Design of a UGV Powered by Solar Energy for Precision Agriculture. Robotics 2020, 9, 13. [Google Scholar] [CrossRef]
- Williams, A.; Yakimenko, O. Persistent Mobile Aerial Surveillance Platform Using Intelligent Battery Health Management and Drone Swapping. In Proceedings of the 2018 4th International Conference on Control, Automation and Robotics (ICCAR), Auckland, New Zealand, 20–23 April 2018; pp. 237–246. [Google Scholar] [CrossRef]
- Bitcraze. Available online: https://www.bitcraze.io/products/crazyflie-2-1/ (accessed on 17 December 2020).
- CrazyRadio PA. Available online: https://www.bitcraze.io/products/crazyradio-pa/ (accessed on 17 December 2020).
- Qi Wireless Charging Standard. Available online: https://www.bitcraze.io/products/qi-1_2-charger-deck/ (accessed on 17 December 2020).
- Crazyflie 2.1 Firmware. Available online: https://github.com/bitcraze/crazyflie-firmware (accessed on 17 December 2020).
- Phil, K.; Lynn, H. Kalman Filter for Beginners: With Matlab Examples; Createspace: Scotts Valley, CA, USA, 2011. [Google Scholar]
- Muhammad, T.; Furqan, A.; Ali, R.; Mohammed, R.; Sung Ho, K. Fuzzy logic-based robust and autonomous safe landing for UAV Quadcopter. Arab. J. Sci. Eng. 2019, 44, 2627–2639. [Google Scholar] [CrossRef]
- Mohammad, R.H.; Abdyl Rahman, E.B. Automatic UAV Wireless charging over solar vehicle to enable frequent flight missions. In Proceedings of the 2019 3rd International Conference on Automation, Control and Robots, Prague, Czech Republic, 11–14 October 2019. [Google Scholar]
- Can, A.; Efstathiades, H.; Montazeri, A. Desing of a Chattering-Free Sliding Mode Control System for 407 Robust Position Control of a Quadrotor. In Proceedings of the 2020 International Conference Nonlinearity, Information and Robotics (NIR), Innopolis, Russia, 3–6 December 2020. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| IAE Value | |
|---|---|
| axis | 2.7930 |
| axis | 2.2099 |
| Error | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | Average |
|---|---|---|---|---|---|---|---|---|---|---|
| 0.1603 | 0.0704 | 0.1130 | 0.0972 | 0.1713 | 0.2658 | 0.0454 | 0.8405 | 0.1489 | 0.2125 | |
| 0.0492 | 0.1472 | 0.1796 | 0.0564 | 0.1473 | 0.5881 | 0.0833 | 0.4940 | 0.3020 | 0.2275 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nguyen, N.P.; Lee, B.H.; Xuan-Mung, N.; Ha, L.N.N.T.; Jeong, H.S.; Lee, S.T.; Hong, S.K. Persistent Charging System for Crazyflie Platform. Drones 2022, 6, 212. https://doi.org/10.3390/drones6080212
Nguyen NP, Lee BH, Xuan-Mung N, Ha LNNT, Jeong HS, Lee ST, Hong SK. Persistent Charging System for Crazyflie Platform. Drones. 2022; 6(8):212. https://doi.org/10.3390/drones6080212
Chicago/Turabian StyleNguyen, Ngoc Phi, Bo Hye Lee, Nguyen Xuan-Mung, Le Nhu Ngoc Thanh Ha, Han Sol Jeong, Seok Tae Lee, and Sung Kyung Hong. 2022. "Persistent Charging System for Crazyflie Platform" Drones 6, no. 8: 212. https://doi.org/10.3390/drones6080212
APA StyleNguyen, N. P., Lee, B. H., Xuan-Mung, N., Ha, L. N. N. T., Jeong, H. S., Lee, S. T., & Hong, S. K. (2022). Persistent Charging System for Crazyflie Platform. Drones, 6(8), 212. https://doi.org/10.3390/drones6080212