
Optimization Methods Applied to Motion Planning of Unmanned Aerial Vehicles: A Review




Abstract
:1. Introduction
- The evaluation of the challenges faced by UAVs under different scenarios.
- Summarizing various promising motion planning techniques and algorithms for determining the optimum path for UAVs.
- To gather the contributions and limitations presented in each article.
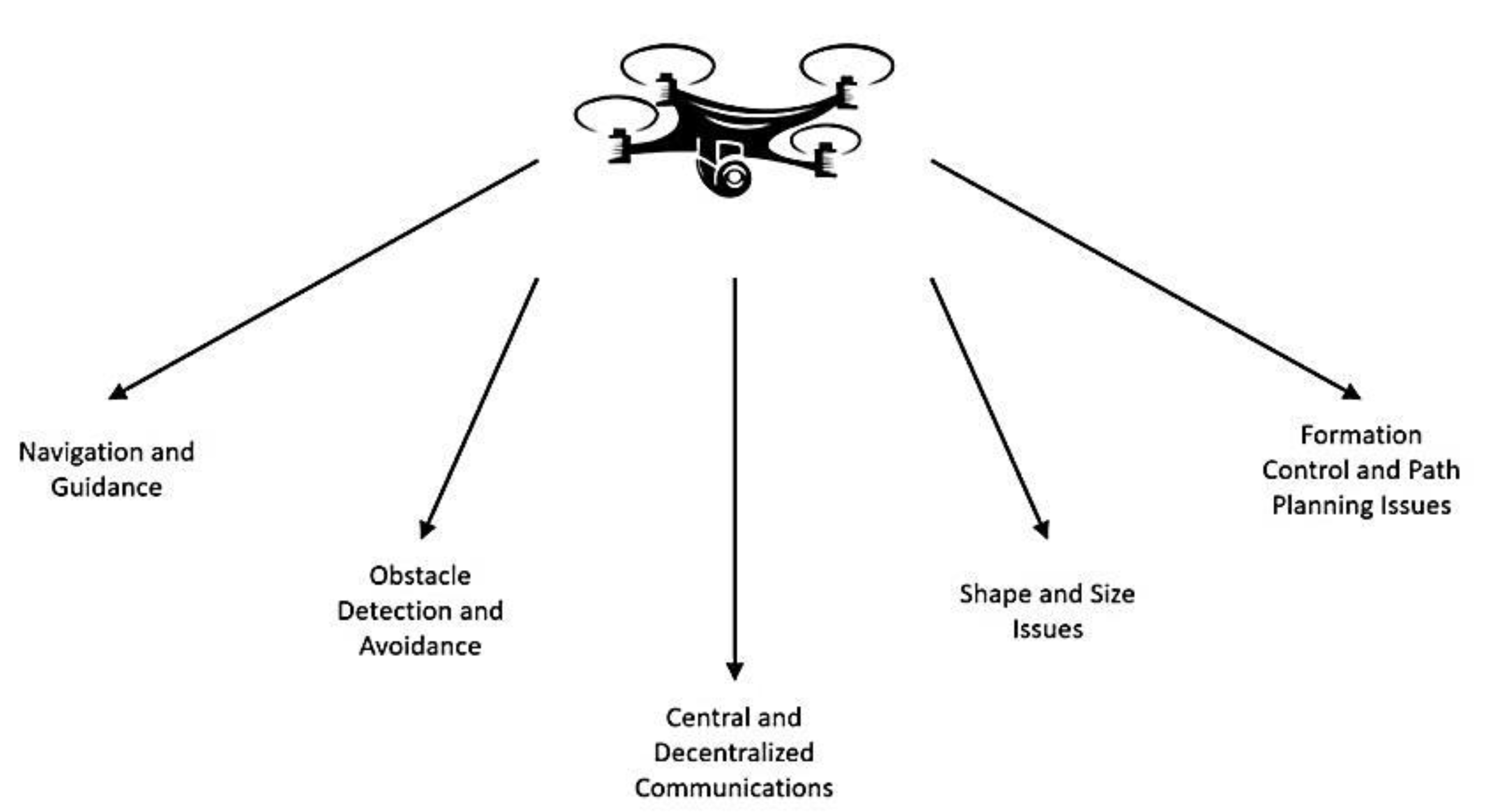
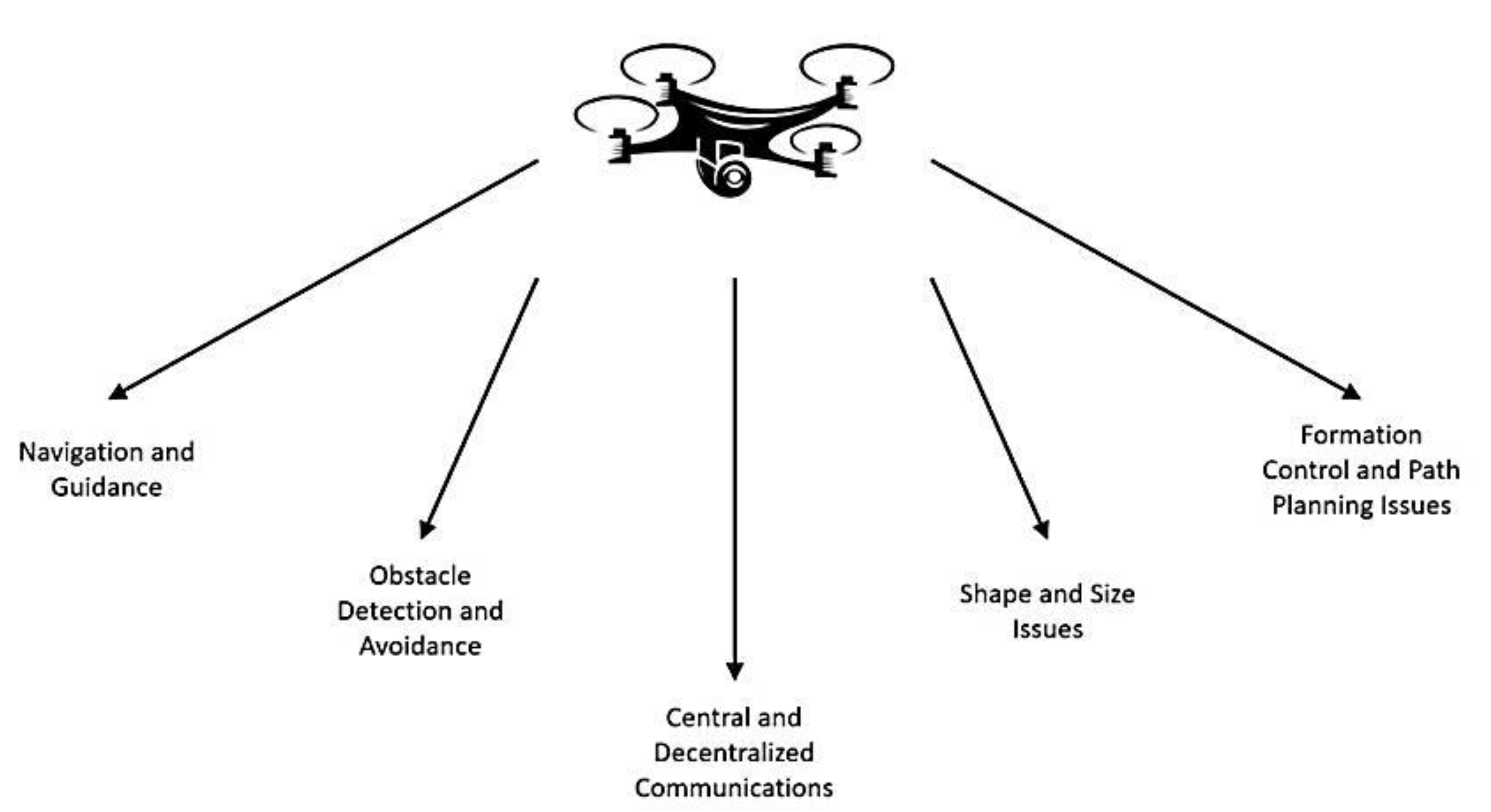
2. Challenges in Unmanned Aerial Vehicles
2.1. Navigation and Guidance
2.2. Obstacle Detection and Avoidance
2.3. Shape and Size
2.4. Formation Control and Path Planning Issues
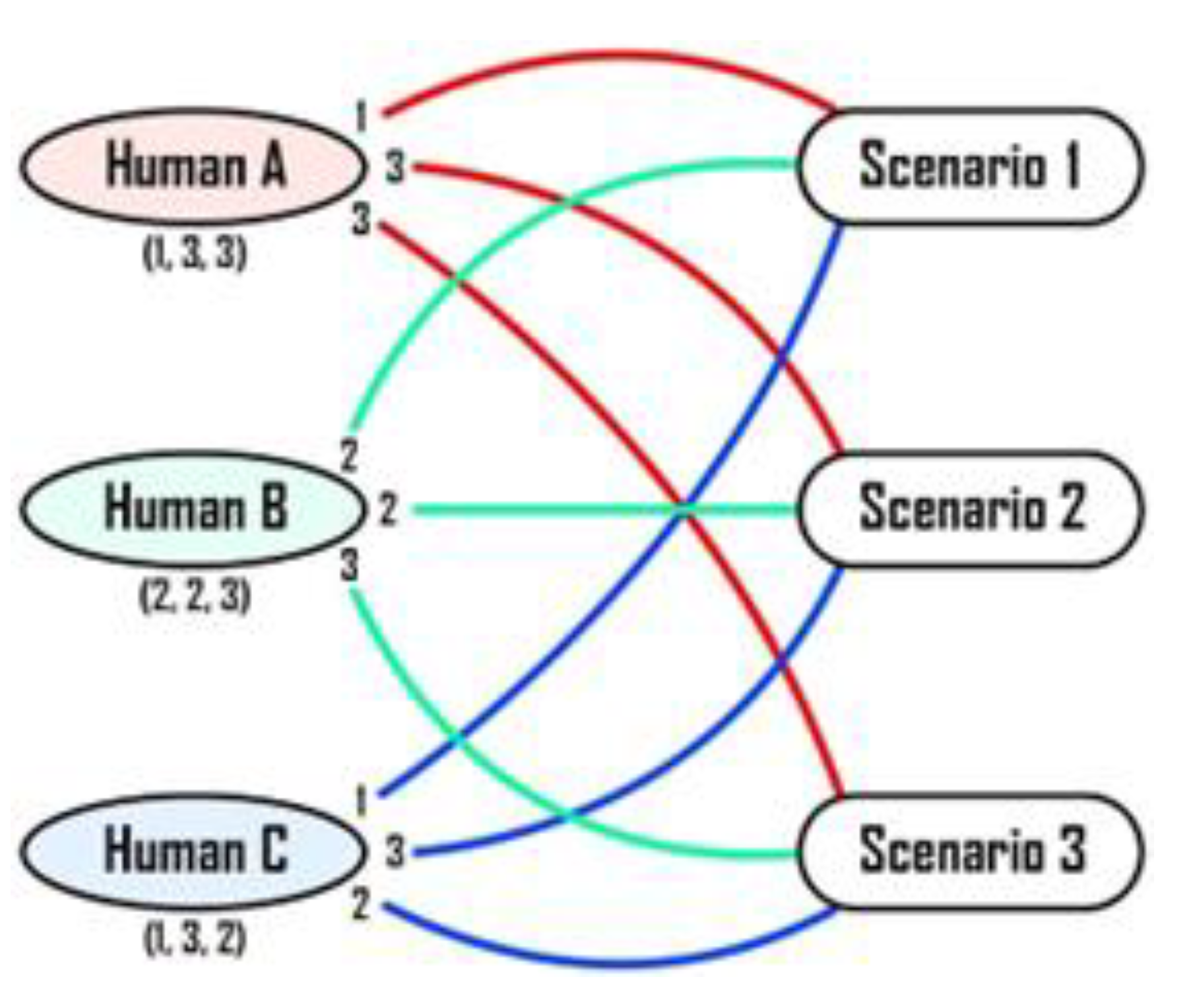
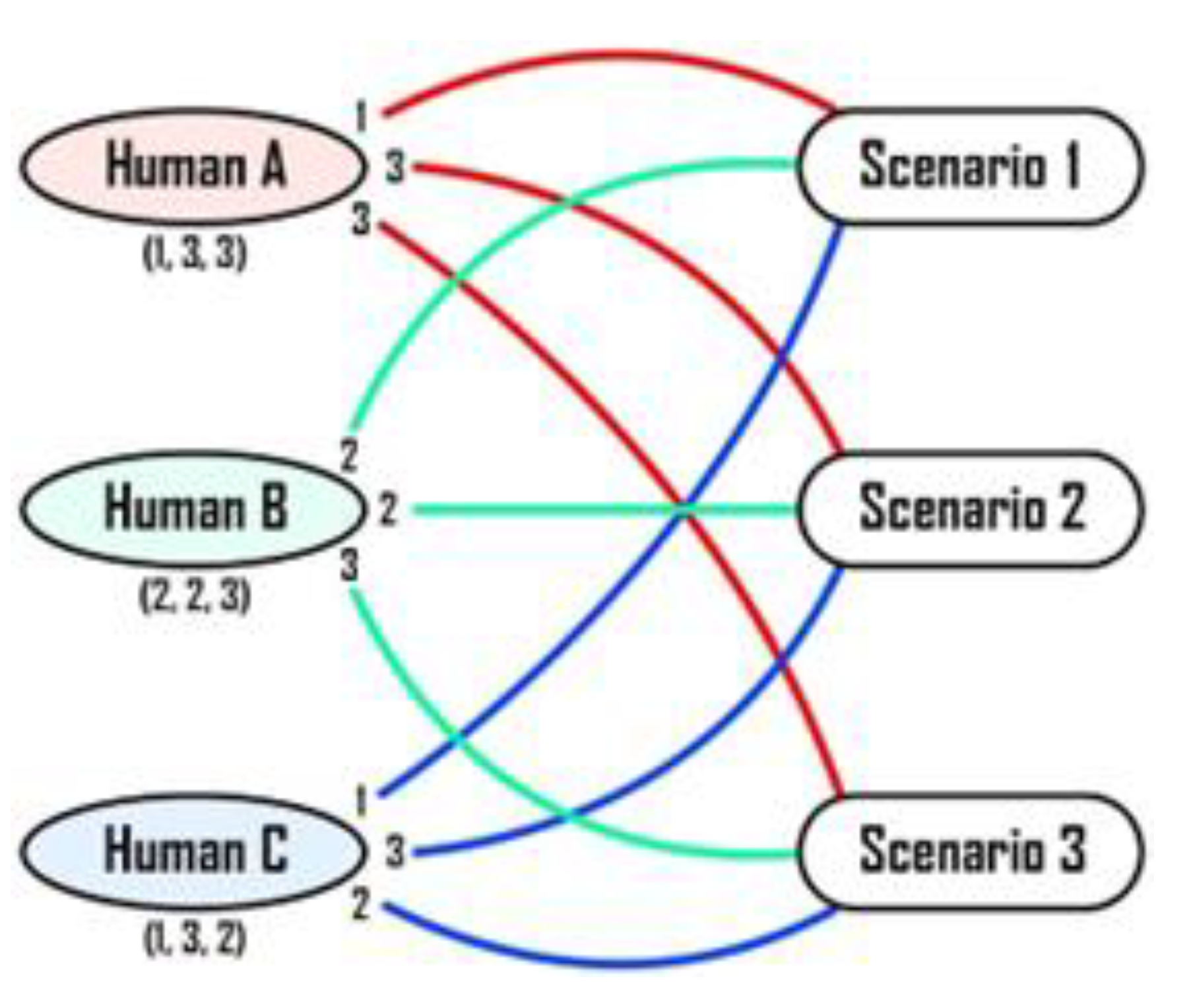
2.4.1. Formation Control Issues
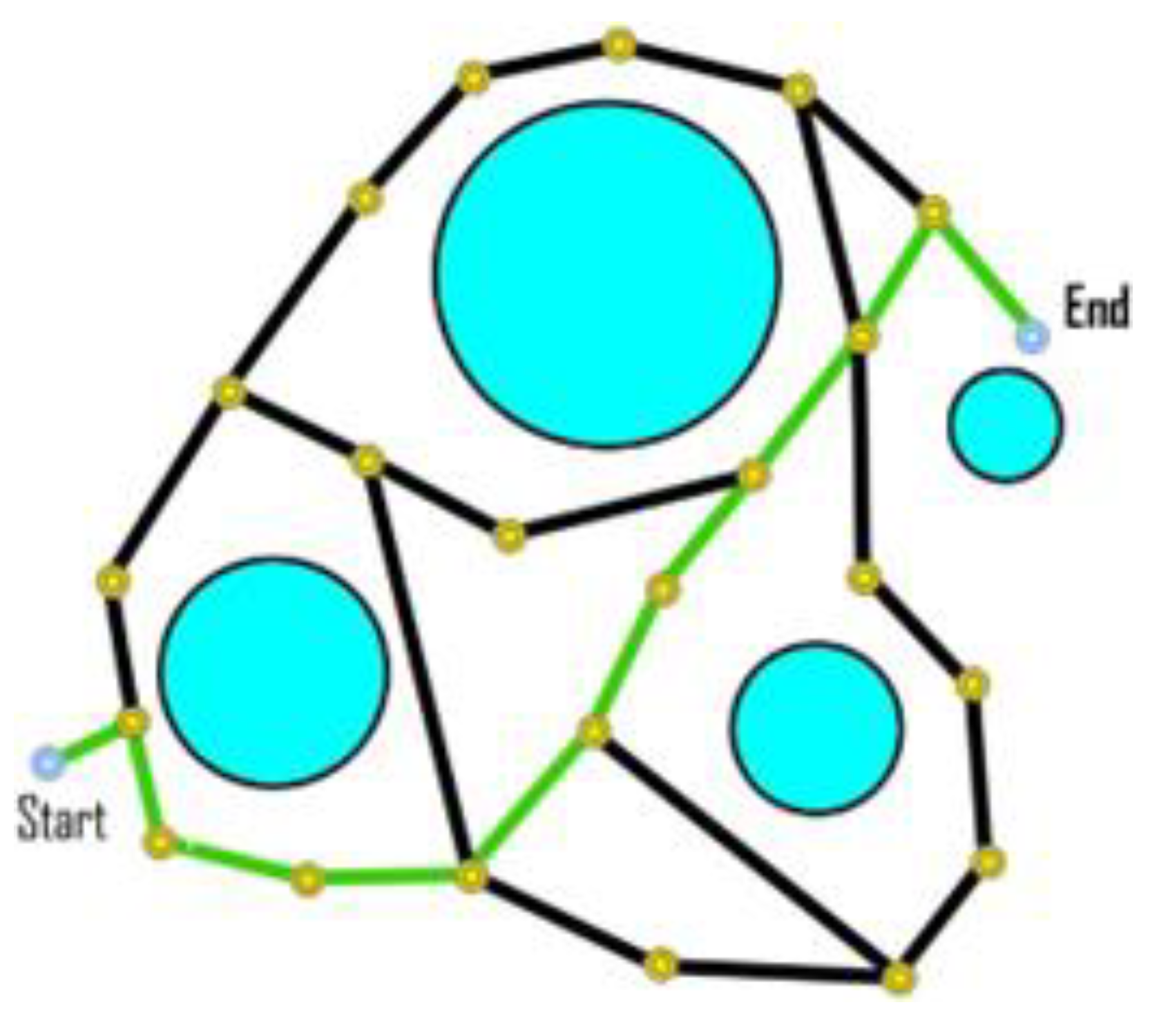
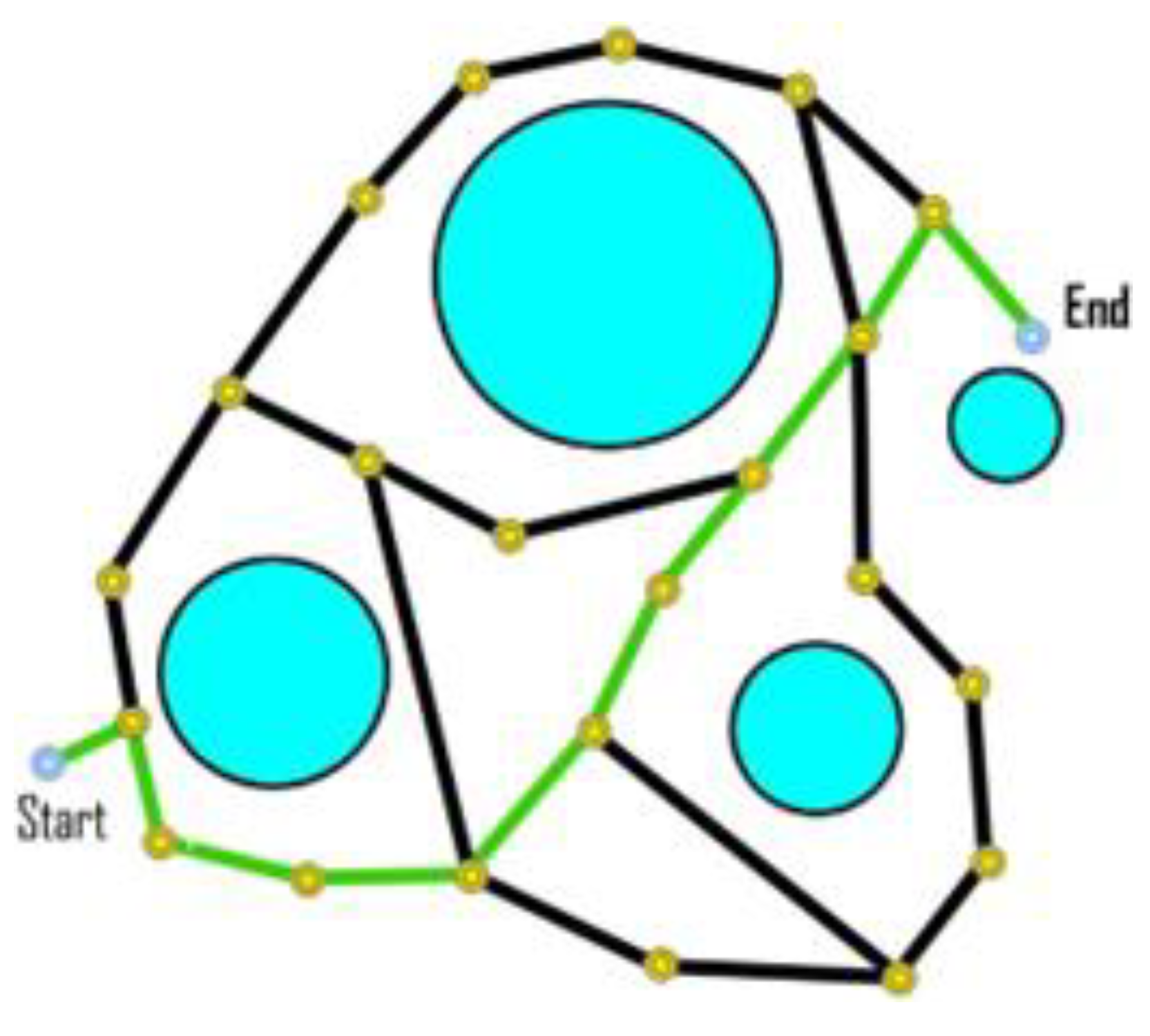
2.4.2. Path Planning Issues
3. Recent Developments in UAVs
3.1. Developments in Navigation and Guidance of UAVs
- D.
- High-performance Navigation with Data Fusion: Navigation uses a Kalman filter; China introduced a data fusion mechanism using this filtering technology. This data fusion is improved by using AI technology. It helps to determine the flight status and guarantees the normal flight of UAVs.
- E.
- New Inertial Navigation System: Many researchers rendered services to develop optical fiber inertial navigation and laser inertial navigation. Improvement was required by the industry. The widely used silicon micro resonant accelerometer helps in UAV navigation. It simplifies the weight and volume, consumes less energy, and refines flight pliability.
- F.
- Intelligent Navigation Ability: An emergency navigation system utilizes various adaptive technologies along with mission characteristics and modes. Moreover, information technology is applied to boost the UAV technology and upgrade the navigation system.
3.2. Developments in Shape and Size of UAVs
3.3. Developments in Collision Avoidance of UAVs
3.4. Developments in Formation Control Protocols of UAVs
- Leader-Follower Strategy: As obvious from its title, this approach assigns one UAV as a leader, while the remaining UAVs as followers in a group. The mission information remains with the leader only while the followers chase their leader with pre-designed spaces. The major benefit of this strategy is that it can be implemented simply and easily. Due to leader dependency, this strategy faces single-point failures. This limitation can be compensated by assigning multi-leaders and virtual leaders.
- Behavior-based Strategy: This approach produces control signals, which consider several mission essentials, by adding various vector functions. Its greatest merit is that it is highly adaptable to any unknown environment. Its demerit is the requirement to model it mathematically, which leads to difficulty in analyzing system stabilities.
- Virtual Structure Strategy: This approach considers rigid structure for the desired shape of the group of UAVs. To achieve the desired shape, there is a need to fly each UAV towards its corresponding virtual node. Abilities to maintain the formation and fault-tolerance are its greatest advantages. This approach faces failure when the detection of a UAV is faulty in the formation. The compensation for this faulty UAV requires reconfiguration of the formation shape. This approach calls for a strong ability to compute, which is a disadvantage of this approach.
3.5. Developments in Path Planning Techniques of UAVs
4. Motion Planning and Optimization
4.1. Motion Planning
4.1.1. Combinatorial Motion Planning
4.1.2. Sampling-Based Motion Planning
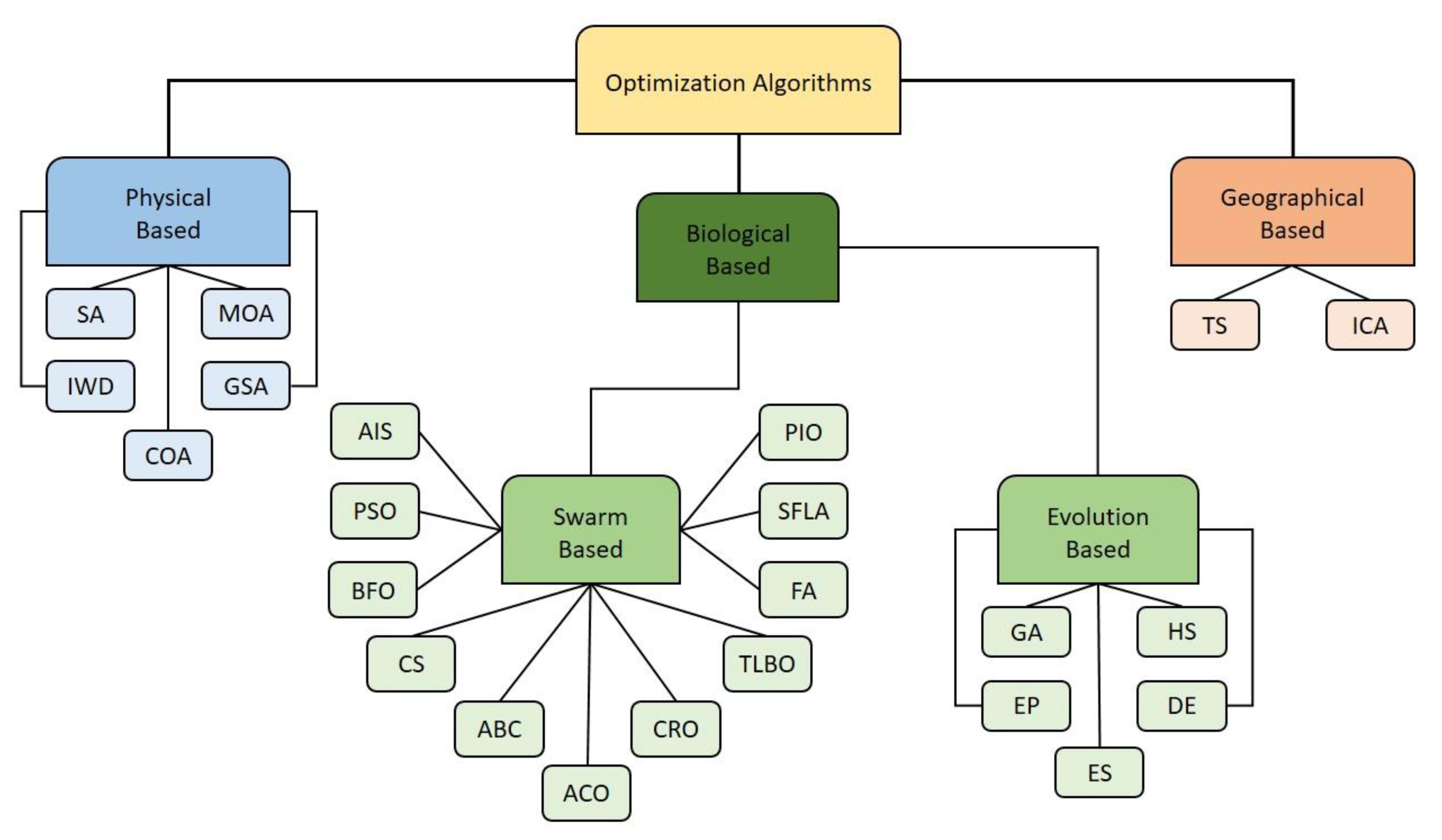
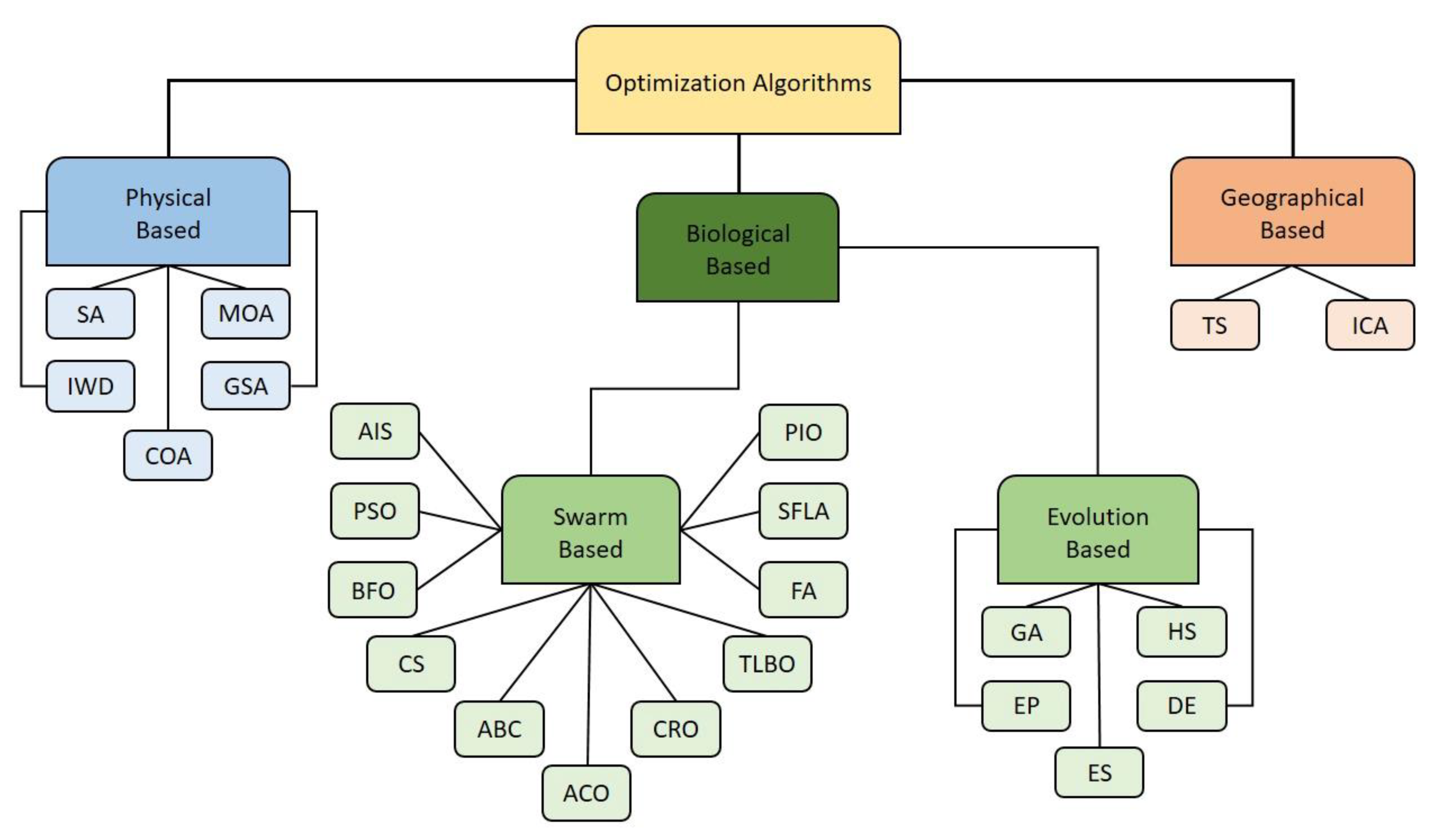
4.2. Optimization Approach in Motion Planning
Biological Algorithms
- A.
- Evolution-Based Algorithms
- B.
- Swarm-Based Algorithms
- C.
- Physical Algorithms
- D.
- Geographical Algorithms
5. Related Review
6. Discussion
7. Conclusions
8. Future Work
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| Acronyms | Definitions |
| UAV | Unmanned Aerial Vehicles |
| AI | Artificial Intelligence |
| P2P | Point-to-Point |
| MAC | Medium Access Control |
| IETF | Internet Engineering Task Force |
| MAVLink | Micro Air Vehicle Link |
| NBC | Nuclear, Biological, and Chemical |
| CAS | Collision Avoidance System |
| IR | InfraRed |
| GA | Genetic algorithm |
| EP | Evolutionary Programming |
| ES | Evolutionary Strategy |
| DE | Differential Evolution |
| HS | Harmony Search |
| AIS | Artificial Immune System |
| PSO | Particle Swarm Optimization |
| BFO | Bacteria Foraging Optimization |
| CS | Cuckoo Search |
| ABC | Artificial Bee Colony |
| ACO | Ant Colony Optimization |
| CRO | Coral Reef Optimization |
| TLBO | Teaching-Learning Based Optimization |
| FA | Firefly algorithm |
| SFLA | Shuffled Frog Leaping algorithm |
| PIO | Pigeon Inspired Optimization |
| SA | Simulated Annealing |
| GSA | Gravitational Search algorithm |
| COA | Chaotic Optimization algorithm |
| IWD | Intelligent Water Drops |
| MOA | Magnetic Optimization |
| TS | Tabu Search algorithm |
| ICA | Imperialistic Competition algorithm |
| MACO | Metropolis Criterion ACO |
| MA | Munkres algorithm |
| GIFC | Gaussian information fusion control |
| DA | Decentralized algorithm |
| SHA | Self-Heuristic Ant |
| TDRS | Task Decomposition Recourse Scheduling |
| CDE | Constraint Differential Evolution |
| PDE | Partial Differential Equation |
| DCPSO | Distributed Cooperative Particle Swarm Optimization |
| DO | Dragonfly Optimization |
| QALO | Quantum Ant Lion Optimization |
| CPFC | Coordinated Path Following Control strategy |
| RSH | Randomized Search Heuristic |
| GTO | Group Teaching Optimization |
| SDCM | Swarm Distributed Cooperation Method |
| MFO | Moth Flame Optimization |
| BOA | Bat Optimization algorithm |
References
- Wang, Z.; Liu, R.; Liu, Q.; Thompson, J.S.; Kadoch, M. Energy-efficient data collection and device positioning in UAV-assisted IoT. IEEE Internet Things J. 2019, 7, 1122–1139. [Google Scholar] [CrossRef]
- Ouns, B.; Abrassart, A.; Garcia, F.; Larrieu, N. A mobility model for UAV ad hoc network. In Proceedings of the 2014 International Conference on Unmanned Aircraft Systems (ICUAS), Orlando, FL, USA, 27–30 May 2014; pp. 383–388. [Google Scholar]
- Kuntz, R.R.; Kienitz, K.H.; Brandão, M.P. Development of a multi-purpose portable electrical UAV system, fixed & rotative wing. In Proceedings of the 2011 Aerospace Conference, Big Sky, MT, USA, 5–12 March 2011; pp. 1–9. [Google Scholar]
- Carrivick, J.L.; Smith, M.W.; Quincey, D.J.; Carver, S.J. Developments in budget remote sensing for the geosciences. Geol. Today 2013, 29, 138–143. [Google Scholar] [CrossRef]
- Taeyoung, L.; Leok, M.; McClamroch, N.H. Nonlinear robust tracking control of a quadrotor UAV on SE (3). Asian J. Control 2013, 15, 391–408. [Google Scholar]
- Ali, K.N.; Brohi, S.N.; Jhanjhi, N.Z. UAV’s applications, architecture, security issues and attack scenarios: A survey. In Intelligent Computing and Innovation on Data Science; Springer: Singapore, 2020; pp. 753–760. [Google Scholar]
- Thammawichai, M.; Baliyarasimhuni, S.P.; Kerrigan, E.C.; Sousa, J.B. Optimizing communication and computation for multi-UAV information gathering applications. IEEE Trans. Aerosp. Electron. Syst. 2017, 54, 601–615. [Google Scholar] [CrossRef] [Green Version]
- Sun, J.; Tang, J.; Lao, S. Collision avoidance for cooperative UAVs with optimized artificial potential field algorithm. IEEE Access 2017, 5, 18382–18390. [Google Scholar] [CrossRef]
- Hu, N.; Tian, Z.; Sun, Y.; Yin, L.; Zhao, B.; Du, X.; Guizani, N. Building agile and resilient uav networks based on sdn and blockchain. IEEE Netw. 2021, 35, 57–63. [Google Scholar] [CrossRef]
- Ziegler, C.A. Weapons development in context: The case of the World War I balloon bomber. Technol. Cult. 1994, 35, 750–767. [Google Scholar] [CrossRef]
- Bertacchi, A.; Giannini, V.; di Franco, C.; Silvestri, N. Using unmanned aerial vehicles for vegetation mapping and identification of botanical species in wetlands. Landsc. Ecol. Eng. 2019, 15, 231–240. [Google Scholar] [CrossRef]
- Keane, J.F.; Carr, S.S. A brief history of early unmanned aircraft. Johns Hopkins APL Tech. Dig. 2013, 32, 558–571. [Google Scholar]
- Jung, S.; Kim, H. Analysis of amazon prime air uav delivery service. J. Knowl. Inf. Technol. Syst. 2017, 12, 253–266. [Google Scholar]
- Yan, F.; Liu, Y.; Xiao, J. Path planning in complex 3D environments using a probabilistic roadmap method. Int. J. Autom. Comput. 2013, 10, 525–533. [Google Scholar] [CrossRef]
- Ahmed, S.; Mohamed, A.; Harras, K.; Kholief, M.; Mesbah, S. Energy efficient path planning techniques for UAV-based systems with space discretization. In Proceedings of the 2016 IEEE Wireless Communications and Networking Conference, Doha, Qatar, 3–6 April 2016; pp. 1–6. [Google Scholar]
- Pachter, M.; D’Azzo, J.J.; Dargan, J.L. Automatic formation flight control. J. Guid. Control Dyn. 1994, 17, 1380–1383. [Google Scholar] [CrossRef]
- Nguyen, H.T.; Quyen, T.V.; Nguyen, C.V.; Le, A.M.; Tran, H.T.; Nguyen, M.T. Control algorithms for UAVs: A comprehensive survey. EAI Endorsed Trans. Ind. Netw. Intell. Syst. 2020, 7, 164586. [Google Scholar] [CrossRef]
- Stentz, A. Optimal and efficient path planning for partially known environments. In Intelligent Unmanned Ground Vehicles; Springer: Boston, MA, USA, 1997; pp. 203–220. [Google Scholar]
- Lu, Y.; Xue, Z.; Xia, G.; Zhang, L. A survey on vision-based UAV navigation. Geo-Spat. Inf. Sci. 2018, 21, 21–32. [Google Scholar] [CrossRef] [Green Version]
- Fraga-Lamas, P.; Ramos, L.; Mondéjar-Guerra, V.; Fernández-Caramés, T.M. A review on IoT deep learning UAV systems for autonomous obstacle detection and collision avoidance. Remote Sens. 2019, 11, 2144. [Google Scholar] [CrossRef] [Green Version]
- Cai, G.; Chen, B.M.; Lee, T.H. An overview on development of miniature unmanned rotorcraft systems. Front. Electr. Electron. Eng. China 2010, 5, 1–14. [Google Scholar] [CrossRef]
- Azoulay, R.; Haddad, Y.; Reches, S. Machine Learning Methods for Management UAV Flocks-a Survey. IEEE Access 2021, 9, 139146–139175. [Google Scholar] [CrossRef]
- Do, H.T.; Hua, H.T.; Nguyen, M.T.; Nguyen, C.V.; Nguyen, H.T.T.; Nguyen, H.T.; Nguyen, N.T.T. Formation control algorithms for multiple-UAVs: A comprehensive survey. EAI Endorsed Trans. Ind. Netw. Intell. Syst. 2021, 8, e3. [Google Scholar] [CrossRef]
- Aggarwal, S.; Kumar, N. Path planning techniques for unmanned aerial vehicles: A review, solutions, and challenges. Comput. Commun. 2020, 149, 270–299. [Google Scholar] [CrossRef]
- Zhang, J.; Liu, W.; Wu, Y. Novel technique for vision-based UAV navigation. IEEE Trans. Aerosp. Electron. Syst. 2011, 47, 2731–2741. [Google Scholar] [CrossRef]
- Ali, Z.A.; Wang, D.B.; Loya, M.S. SURF and LA with RGB Vector Space Based Detection and Monitoring of Manholes with an Application to Tri-Rotor UAS Images. Int. J. Eng. Technol. 2017, 9, 32. [Google Scholar]
- Craighead, J.; Murphy, R.; Burke, J.; Goldiez, B. A survey of commercial & open source unmanned vehicle simulators. In Proceedings of the Proceedings 2007 IEEE International Conference on Robotics and Automation, Rome, Italy, 10–14 April 2007; pp. 852–857. [Google Scholar]
- Park, J.-W.; Oh, H.-Y.; Tahk, M.-I. UAV collision avoidance based on geometric approach. In Proceedings of the 2008 SICE Annual Conference, Tokyo, Japan, 20–22 August 2008; pp. 2122–2126. [Google Scholar]
- Anderson, B.; Fidan, B.; Yu, C.; Walle, D. UAV formation control: Theory and application. In Recent Advances in Learning and Control; Springer: London, UK, 2008; pp. 15–33. [Google Scholar]
- Bortoff, S.A. Path planning for UAVs. In Proceedings of the 2000 American Control Conference, ACC (IEEE Cat. No. 00CH36334), Chicago, IL, USA, 28–30 June 2000; Volume 1, pp. 364–368. [Google Scholar]
- Du, T.; Noel, E.; Burdick, J.W. Robotic motion planning in dynamic, cluttered, uncertain environments. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010; pp. 966–973. [Google Scholar]
- Malik, W.; Rathinam, S.; Darbha, S.; Jeffcoat, D. Combinatorial motion planning of multiple vehicle systems. In Proceedings of the 45th IEEE Conference on Decision and Control, San Diego, CA, USA, 13–15 December 2006; pp. 5299–5304. [Google Scholar]
- Lindemann, S.R.; LaValle, S.M. Current issues in sampling-based motion planning. In Robotics Research. The Eleventh International Symposium; Springer: Berlin/Heidelberg, Germany, 2005; pp. 36–54. [Google Scholar]
- Ferguson, D.; Howard, T.M.; Likhachev, M. Motion planning in urban environments. J. Field Robot. 2008, 25, 939–960. [Google Scholar] [CrossRef]
- Overmars, M.H. A Random Approach to Motion Planning; Department of Computer Science, Utrecht University: Utrecht, The Netherlands, 1992. [Google Scholar]
- Behera, S.; Sahoo, S.; Pati, B.B. A review on optimization algorithms and application to wind energy integration to grid. Renew. Sustain. Energy Rev. 2015, 48, 214–227. [Google Scholar] [CrossRef]
- Iztok, F., Jr.; Yang, X.; Fister, I.; Brest, J.; Fister, D. A brief review of nature-inspired algorithms for optimization. arXiv 2013, arXiv:1307.4186. [Google Scholar]
- Rathbun, D.; Kragelund, S.; Pongpunwattana, A.; Capozzi, B. An evolution based path planning algorithm for autonomous motion of a UAV through uncertain environments. In Proceedings of the 21st Digital Avionics Systems Conference, Irvine, CA, USA, 27–31 October 2002; Volume 2, p. 8D2. [Google Scholar]
- Yang, X.-S. Swarm-based metaheuristic algorithms and no-freelunch theorems. In Theory and New Applications of Swarm Intelligence; Intech: Rijeka, Croatia, 2012. [Google Scholar]
- Beheshti, Z.; Shamsuddin, S.M.H. A review of population-based meta-heuristic algorithms. Int. J. Adv. Soft Comput. Appl. 2013, 5, 1–35. [Google Scholar]
- Kanza, Y.; Safra, E.; Sagiv, Y.; Doytsher, Y. Heuristic algorithms for route-search queries over geographical data. In Proceedings of the 16th ACM SIGSPATIAL International Conference on Advances in Geographic Information Systems, Irvine, CA, USA, 5–7 November 2008; pp. 1–10. [Google Scholar]
- Liu, Y.; Zhang, X.; Zhang, Y.; Guan, X. Collision free 4D path planning for multiple UAVs based on spatial refined voting mechanism and PSO approach. Chin. J. Aeronaut. 2019, 32, 1504–1519. [Google Scholar] [CrossRef]
- Duan, H.; Zhao, J.; Deng, Y.; Shi, Y.; Ding, X. Dynamic discrete pigeon-inspired optimization for multi-UAV cooperative search-attack mission planning. IEEE Trans. Aerosp. Electron. Syst. 2020, 57, 706–720. [Google Scholar] [CrossRef]
- Jain, G.; Yadav, G.; Prakash, D.; Shukla, A.; Tiwari, R. MVO-based path planning scheme with coordination of UAVs in 3-D environment. J. Comput. Sci. 2019, 37, 101016. [Google Scholar] [CrossRef]
- Pérez-Carabaza, S.; Scherer, J.; Rinner, B.; López-Orozco, J.A.; Besada-Portas, E. UAV trajectory optimization for Minimum Time Search with communication constraints and collision avoidance. Eng. Appl. Artif. Intell. 2019, 85, 357–371. [Google Scholar] [CrossRef]
- Shao, S.; Peng, Y.; He, C.; Du, Y. Efficient path planning for UAV formation via comprehensively improved particle swarm optimization. ISA Trans. 2020, 97, 415–430. [Google Scholar] [CrossRef]
- Mah, M.-C.; Lim, H.-E.; Tan, A.W. Secrecy improvement via joint optimization of UAV relay flight path and transmit power. Veh. Commun. 2020, 23, 100217. [Google Scholar] [CrossRef]
- Li, B.; Qi, X.; Yu, B.; Liu, L. Trajectory planning for UAV based on improved ACO algorithm. IEEE Access 2019, 8, 2995–3006. [Google Scholar] [CrossRef]
- Flores-Caballero, G.; Rodríguez-Molina, A.; Aldape-Pérez, M.; Villarreal-Cervantes, M.G. Optimized path-planning in continuous spaces for unmanned aerial vehicles using meta-heuristics. IEEE Access 2020, 8, 176774–176788. [Google Scholar] [CrossRef]
- Ning, Q.; Tao, G.; Chen, B.; Lei, Y.; Yan, H.; Zhao, C. Multi-UAVs trajectory and mission cooperative planning based on the Markov model. Phys. Commun. 2019, 35, 100717. [Google Scholar] [CrossRef]
- Pamosoaji, A.K.; Piao, M.; Hong, K. PSO-based minimum-time motion planning for multiple vehicles under acceleration and velocity limitations. Int. J. Control Autom. Syst. 2019, 17, 2610–2623. [Google Scholar] [CrossRef]
- Xu, Q.; Wang, Z.; Zhen, Z. Information fusion estimation-based path following control of quadrotor UAVs subjected to Gaussian random disturbance. ISA Trans. 2020, 99, 84–94. [Google Scholar] [CrossRef] [PubMed]
- Hu, Y.; Yao, Y.; Ren, Q.; Zhou, X. 3D multi-UAV cooperative velocity-aware motion planning. Future Gener. Comput. Syst. 2020, 102, 762–774. [Google Scholar] [CrossRef]
- Gao, Y.; Li, D. Unmanned aerial vehicle swarm distributed cooperation method based on situation awareness consensus and its information processing mechanism. Knowl. Based Syst. 2020, 188, 105034. [Google Scholar] [CrossRef]
- Shang, Z.; Bradley, J.; Shen, Z. A co-optimal coverage path planning method for aerial scanning of complex structures. Expert Syst. Appl. 2020, 158, 113535. [Google Scholar] [CrossRef]
- Qu, C.; Gai, W.; Zhang, J.; Zhong, M. A novel hybrid grey wolf optimizer algorithm for unmanned aerial vehicle (UAV) path planning. Knowl. Based Syst. 2020, 194, 105530. [Google Scholar] [CrossRef]
- Krishnan, S.; Rajagopalan, G.A.; Kandhasamy, S.; Shanmugavel, M. Continuous-Time Trajectory Optimization for Decentralized Multi-Robot Navigation. IFAC-Pap. OnLine 2020, 53, 494–499. [Google Scholar] [CrossRef]
- Zhang, C.; Hu, C.; Feng, J.; Liu, Z.; Zhou, Y.; Zhang, Z. A self-heuristic ant-based method for path planning of unmanned aerial vehicle in complex 3-D space with dense U-type obstacles. IEEE Access 2019, 7, 150775–150791. [Google Scholar] [CrossRef]
- Zhou, Y.; Zhao, H.; Chen, J.; Jia, Y. A novel mission planning method for UAVs’ course of action. Comput. Commun. 2020, 152, 345–356. [Google Scholar] [CrossRef]
- Qiu, H.; Duan, H. A multi-objective pigeon-inspired optimization approach to UAV distributed flocking among obstacles. Inf. Sci. 2020, 509, 515–529. [Google Scholar] [CrossRef]
- Konatowski, S.; Pawłowski, P. Application of the ACO algorithm for UAV path planning. Prz. Elektrotechniczny 2019, 95, 115–118. [Google Scholar] [CrossRef]
- Huang, J.; Sun, W. A method of feasible trajectory planning for UAV formation based on bi-directional fast search tree. Optik 2020, 221, 165213. [Google Scholar] [CrossRef]
- Radmanesh, R.; Kumar, M.; French, D.; Casbeer, D. Towards a PDE-based large-scale decentralized solution for path planning of UAVs in shared airspace. Aerosp. Sci. Technol. 2020, 105, 105965. [Google Scholar] [CrossRef]
- Xu, C.; Xu, M.; Yin, C. Optimized multi-UAV cooperative path planning under the complex confrontation environment. Comput. Commun. 2020, 162, 196–203. [Google Scholar] [CrossRef]
- Yu, X.; Li, C.; Zhou, J. A constrained differential evolution algorithm to solve UAV path planning in disaster scenarios. Knowl. Based Syst. 2020, 204, 106209. [Google Scholar] [CrossRef]
- Qu, C.; Gai, W.; Zhong, M.; Zhang, J. A novel reinforcement learning based grey wolf optimizer algorithm for unmanned aerial vehicles (UAVs) path planning. Appl. Soft Comput. 2020, 89, 106099. [Google Scholar] [CrossRef]
- Shen, L.; Wang, Y.; Liu, K.; Yang, Z.; Shi, X.; Yang, X.; Jing, K. Synergistic path planning of multi-UAVs for air pollution detection of ships in ports. Transp. Res. Part E Logist. Transp. Rev. 2020, 144, 102128. [Google Scholar] [CrossRef]
- Zhen, Z.; Chen, Y.; Wen, L.; Han, B. An intelligent cooperative mission planning scheme of UAV swarm in uncertain dynamic environment. Aerosp. Sci. Technol. 2020, 100, 105826. [Google Scholar] [CrossRef]
- Li, K.; Ge, F.; Han, Y.; Xu, W. Path planning of multiple UAVs with online changing tasks by an ORPFOA algorithm. Eng. Appl. Artif. Intell. 2020, 94, 103807. [Google Scholar] [CrossRef]
- Shao, Z.; Yan, F.; Zhou, Z.; Zhu, X. Path planning for multi-UAV formation rendezvous based on distributed cooperative particle swarm optimization. Appl. Sci. 2019, 9, 2621. [Google Scholar] [CrossRef] [Green Version]
- Ilango, H.S.; Ramanathan, R. A Performance Study of Bio-Inspired Algorithms in Autonomous Landing of Unmanned Aerial Vehicle. Procedia Comput. Sci. 2020, 171, 1449–1458. [Google Scholar] [CrossRef]
- Khan, S.I.; Qadir, Z.; Munawar, H.S.; Nayak, S.R.; Budati, A.K.; Verma, K.D.; Prakash, D. UAVs path planning architecture for effective medical emergency response in future networks. Phys. Commun. 2021, 47, 101337. [Google Scholar] [CrossRef]
- Ali, Z.A.; Zhangang, H.; Zhengru, D. Path planning of multiple UAVs using MMACO and DE algorithm in dynamic environment. Meas. Control 2020, 0020294020915727. [Google Scholar] [CrossRef]
- Wang, Y.; Zhang, T.; Cai, Z.; Zhao, J.; Wu, K. Multi-UAV coordination control by chaotic grey wolf optimization based distributed MPC with event-triggered strategy. Chin. J. Aeronaut. 2020, 33, 2877–2897. [Google Scholar] [CrossRef]
- Ali, Z.A.; Han, Z.; Masood, R.J. Collective Motion and Self-Organization of a Swarm of UAVs: A Cluster-Based Architecture. Sensors 2021, 21, 3820. [Google Scholar] [CrossRef]
- Shafiq, M.; Ali, Z.A.; Alkhammash, E.H. A cluster-based hierarchical-approach for the path planning of swarm. Appl. Sci. 2021, 11, 6864. [Google Scholar] [CrossRef]
- Ali, Z.A.; Zhangang, H.; Hang, W.B. Cooperative path planning of multiple UAVs by using max–min ant colony optimization along with cauchy mutant operator. Fluct. Noise Lett. 2021, 20, 2150002. [Google Scholar] [CrossRef]
- He, H.; Duan, H. A multi-strategy pigeon-inspired optimization approach to active disturbance rejection control parameters tuning for vertical take-off and landing fixed-wing UAV. Chin. J. Aeronaut. 2021, 35, 19–30. [Google Scholar] [CrossRef]
- Liang, S.; Song, B.; Xue, D. Landing route planning method for micro drones based on hybrid optimization algorithm. Biomim. Intell. Robot. 2021, 1, 100003. [Google Scholar] [CrossRef]
- Pustokhina, I.V.; Pustokhin, D.A.; Lydia, E.L.; Elhoseny, M.; Shankar, K. Energy Efficient Neuro-Fuzzy Cluster based Topology Construction with Metaheuristic Route Planning Algorithm for Unmanned Aerial Vehicles. Comput. Netw. 2021, 107, 108214. [Google Scholar] [CrossRef]
- Chen, H.; Wang, X.; Shen, L.; Yu, Y. Coordinated path following control of fixed-wing unmanned aerial vehicles in wind. ISA Trans. 2021, 122, 260–270. [Google Scholar] [CrossRef]
- Jiang, Y.; Wu, Q.; Zhang, G.; Zhu, S.; Xing, W. A diversified group teaching optimization algorithm with segment-based fitness strategy for unmanned aerial vehicle route planning. Expert Syst. Appl. 2021, 185, 115690. [Google Scholar] [CrossRef]
- Cho, S.W.; Park, H.J.; Lee, H.; Shim, D.H.; Kim, S. Coverage path planning for multiple unmanned aerial vehicles in maritime search and rescue operations. Comput. Ind. Eng. 2021, 161, 107612. [Google Scholar] [CrossRef]
- Zhang, X.; Xia, S.; Zhang, T.; Li, X. Hybrid FWPS cooperation algorithm based unmanned aerial vehicle constrained path planning. Aerosp. Sci. Technol. 2021, 118, 107004. [Google Scholar] [CrossRef]
- Phung, M.D.; Ha, Q.P. Safety-enhanced UAV path planning with spherical vector-based particle swarm optimization. Appl. Soft Comput. 2021, 107, 107376. [Google Scholar] [CrossRef]
- Suo, W.; Wang, M.; Zhang, D.; Qu, Z.; Yu, L. Formation Control Technology of Fixed-Wing UAV Swarm Based on Distributed Ad Hoc Network. Appl. Sci. 2022, 12, 535. [Google Scholar] [CrossRef]
- Zong, Q.; Wang, D.; Shao, S.; Zhang, B.; Han, Y. Research status and development of multi UAV coordinated formation flight control. J. Harbin Inst. Technol. 2017, 49, 1–14. [Google Scholar]
- Ambroziak, L.; Ciężkowski, M. Virtual Electric Dipole Field Applied to Autonomous Formation Flight Control of Unmanned Aerial Vehicles. Sensors 2021, 21, 4540. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref. | Topic | Optimization Approach | UAV Type | Contributions | Limitations |
|---|---|---|---|---|---|
| [42] | “Collision free 4D path planning for multiple UAVs based on spatial refined voting mechanism and PSO approach” | PSO | Multiple |
|
|
| [43] | “Dynamic Discrete Pigeon-inspired Optimization for Multi-UAV Cooperative Search-attack Mission Planning” | D2PIO | Multiple |
|
|
| [44] | “MVO-Based Path Planning Scheme with Coordination of UAVs in 3-D Environment” | MA | Multiple |
|
|
| [45] | “UAV trajectory optimization for Minimum Time Search with communication constraints and collision avoidance” | ACO | Single |
|
|
| [46] | “Efficient path planning for UAV formation via comprehensively improved particle swarm optimization” | IPSO | Multiple |
|
|
| [47] | “Secrecy improvement via a joint optimization of UAV relay flight path and transmit power” | PSO | Single |
|
|
| [48] | “Trajectory Planning for UAV Based on Improved ACO Algorithm” | MACO | Multiple |
|
|
| [49] | “Optimized Path-Planning in Continuous Spaces for Unmanned Aerial Vehicles Using Meta-Heuristics” | DE PSO GA | Multiple |
|
|
| [50] | “Multi-UAVs trajectory and mission cooperative planning based on the Markov model” | SA | Multiple |
|
|
| [51] | “PSO-based Minimum-time Motion Planning for Multiple Vehicles Under Acceleration and Velocity Limitations” | PSO | Multiple |
|
|
| [52] | “Information fusion estimation-based path following control of quad-rotor UAVs subjected to Gaussian random disturbance” | GIFC | Single |
|
|
| [53] | “3D multi-UAV cooperative velocity-aware motion planning” | A* | Multiple |
|
|
| [54] | “Unmanned aerial vehicle swarm distributed cooperation method based on situation awareness consensus and its information processing mechanism” | SDCM | Multiple |
|
|
| [55] | “A co-optimal coverage path planning method for aerial scanning of complex structures” | CCPP PSO | Multiple |
|
|
| [56] | “A novel hybrid grey wolf optimizer algorithm for unmanned aerial vehicle (UAV) path planning” | Hybrid GWO | Single |
|
|
| [57] | “Continuous-Time Trajectory Optimization for Decentralized Multi-Robot Navigation” | DA | Multiple |
|
|
| [58] | “A Self-Heuristic Ant-Based Method for Path Planning of Unmanned Aerial Vehicle in Complex 3-D Space with Dense U-Type Obstacles” | SHA | Single |
|
|
| [59] | “A novel mission planning method for UAVs’ course of action” | TDRS | Single |
|
|
| [60] | “A multi-objective pigeon-inspired optimization approach to UAV distributed flocking among obstacles” | Improved MPIO | Single |
|
|
| [61] | “Application of the ACO algorithm for UAV path planning” | ACO | Single |
|
|
| [62] | “A method of feasible trajectory planning for UAV formation based on bi-directional fast search tree” | Bi-RRT | Single |
|
|
| [63] | “Towards a PDE-based large-scale decentralized solution for path planning of UAVs in shared airspace” | PDE | Single |
|
|
| [64] | “Optimized multi-UAV cooperative path planning under the complex confrontation environment” | Improved GWO | Multiple |
|
|
| [65] | “A constrained differential evolution algorithm to solve UAV path planning in disaster scenarios” | CDE | Single |
|
|
| [66] | “A novel reinforcement learning-based grey wolf optimizer algorithm for unmanned aerial vehicles (UAVs) path planning” | GWO | Single |
|
|
| [67] | “Synergistic path planning of multi-UAVs for air pollution detection of ships in ports” | PSO | Multiple |
|
|
| [68] | “An intelligent cooperative mission planning scheme of UAV swarm in uncertain dynamic environment” | HAPF ACO | Multiple |
|
|
| [69] | “Path planning of multiple UAVs with online changing tasks by an ORPFOA algorithm” | ORPFOA | Multiple |
|
|
| [70] | “Path Planning for Multi-UAV Formation Rendezvous Based on Distributed Cooperative Particle Swarm Optimization” | DCPSO | Multiple |
|
|
| [71] | “A Performance Study of Bio-Inspired Algorithms in Autonomous Landing of Unmanned Aerial Vehicle” | BOA MFO ABC | Single |
|
|
| [72] | “UAVs path planning architecture for effective medical emergency response in future networks” | CVRP PSO ACO GA | Single |
|
|
| [73] | “Path planning of multiple UAVs using MMACO and DE algorithm in dynamic environment” | MMACO DE | Multiple |
|
|
| [74] | “Multi-UAV coordination control by chaotic grey wolf optimization-based distributed MPC with event-triggered strategy” | Chaotic GWO | Multiple |
|
|
| [75] | “Collective Motion and Self-Organization of a Swarm of UAVs: A Cluster-Based Architecture” | PSO | Multiple |
|
|
| [76] | “A Cluster-Based Hierarchical-Approach for the Path Planning of Swarm” | MMACO | Multiple |
|
|
| [77] | “Cooperative Path Planning of Multiple UAVs by using Max-Min Ant Colony Optimization along with Cauchy Mutant Operator” | MMACO CM | Multiple |
|
|
| [78] | “A multi-strategy pigeon-inspired optimization approach to active disturbance rejection control parameters tuning for vertical take-off and landing fixed-wing UAV” | MPIO | Single |
|
|
| [79] | “Landing route planning method for micro drones based on hybrid optimization algorithm” | DO | Multiple |
|
|
| [80] | “Energy Efficient Neuro-Fuzzy Cluster-based Topology Construction with Metaheuristic Route Planning Algorithm for Unmanned Aerial Vehicles” | QALO | Single |
|
|
| [81] | “Coordinated path following control of fixed-wing unmanned aerial vehicles in wind” | CPFC | Single |
|
|
| [82] | “A diversified group teaching optimization algorithm with segment-based fitness strategy for unmanned aerial vehicle route planning” | GTO | Single |
|
|
| [83] | “Coverage path planning for multiple unmanned aerial vehicles in maritime search and rescue operations” | RSH | Multiple |
|
|
| [84] | “Hybrid FWPS cooperation algorithm based unmanned aerial vehicle constrained path planning” | FWPSALC | Single |
|
|
| [85] | “Safety-enhanced UAV path planning with spherical vector-based particle swarm optimization” | PSO | Single |
|
|
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Israr, A.; Ali, Z.A.; Alkhammash, E.H.; Jussila, J.J. Optimization Methods Applied to Motion Planning of Unmanned Aerial Vehicles: A Review. Drones 2022, 6, 126. https://doi.org/10.3390/drones6050126
Israr A, Ali ZA, Alkhammash EH, Jussila JJ. Optimization Methods Applied to Motion Planning of Unmanned Aerial Vehicles: A Review. Drones. 2022; 6(5):126. https://doi.org/10.3390/drones6050126
Chicago/Turabian StyleIsrar, Amber, Zain Anwar Ali, Eman H. Alkhammash, and Jari Juhani Jussila. 2022. "Optimization Methods Applied to Motion Planning of Unmanned Aerial Vehicles: A Review" Drones 6, no. 5: 126. https://doi.org/10.3390/drones6050126
APA StyleIsrar, A., Ali, Z. A., Alkhammash, E. H., & Jussila, J. J. (2022). Optimization Methods Applied to Motion Planning of Unmanned Aerial Vehicles: A Review. Drones, 6(5), 126. https://doi.org/10.3390/drones6050126