
UAV-Based Landfill Land Cover Mapping: Optimizing Data Acquisition and Open-Source Processing Protocols



Abstract
:1. Introduction
2. Materials and Methods
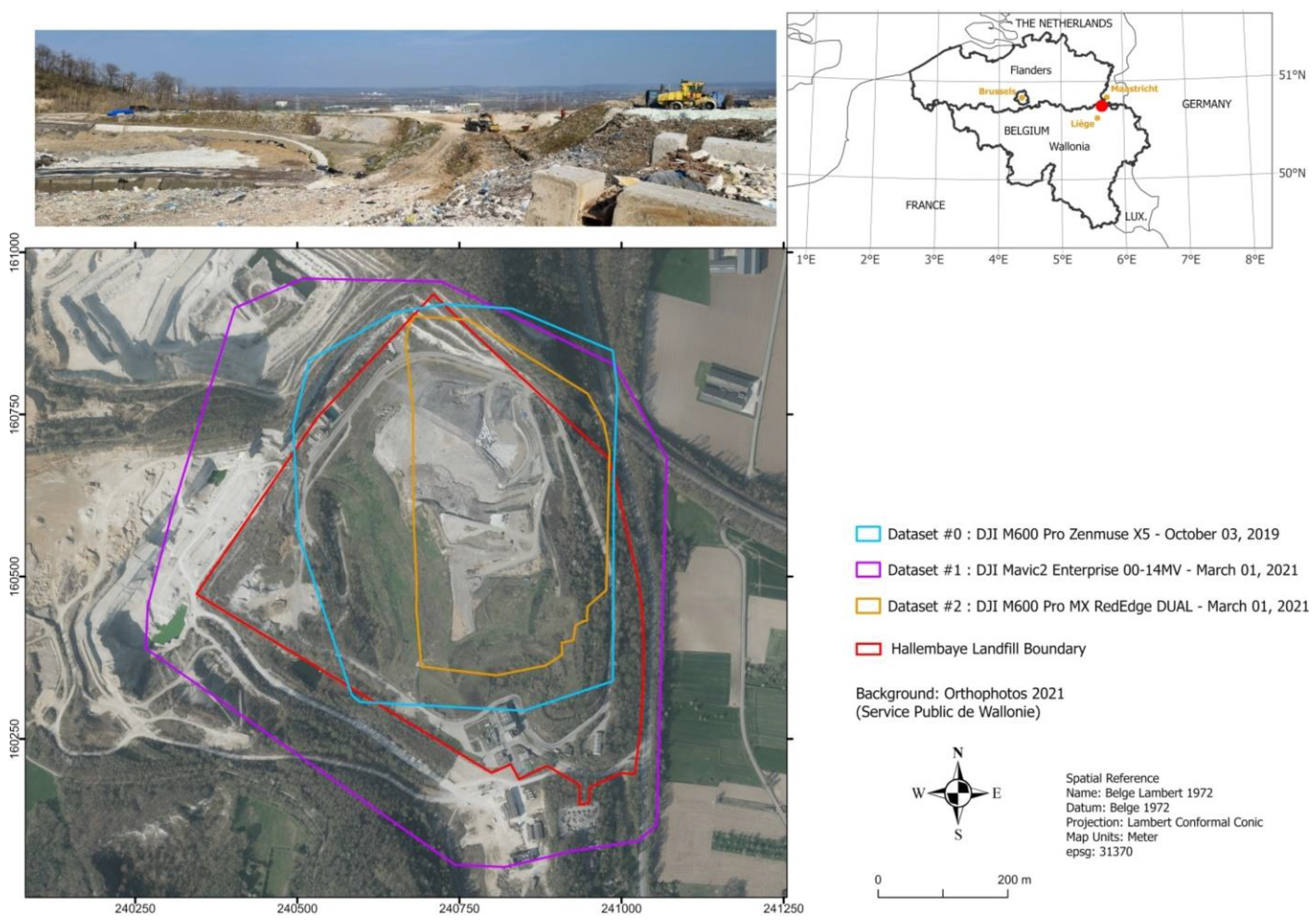
2.1. Study Area
2.2. Data
2.3. OBIA Processing Chain
2.3.1. Classification Scheme and Sampling
2.3.2. Image Segmentation
2.3.3. Object Statistics Computation/Feature Creation
2.3.4. Classification
2.3.5. Post-Processing
2.4. Experiments
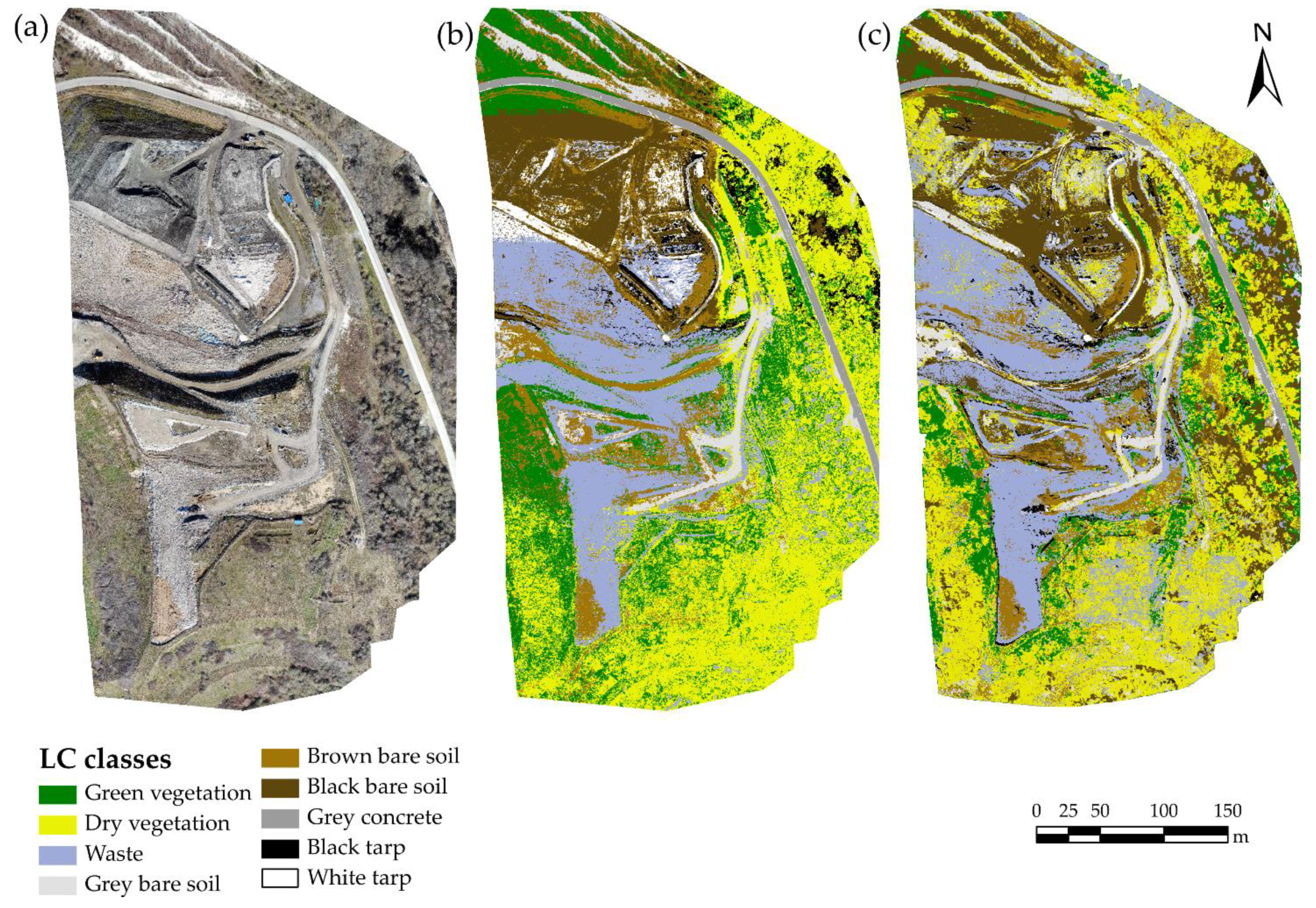
3. Results
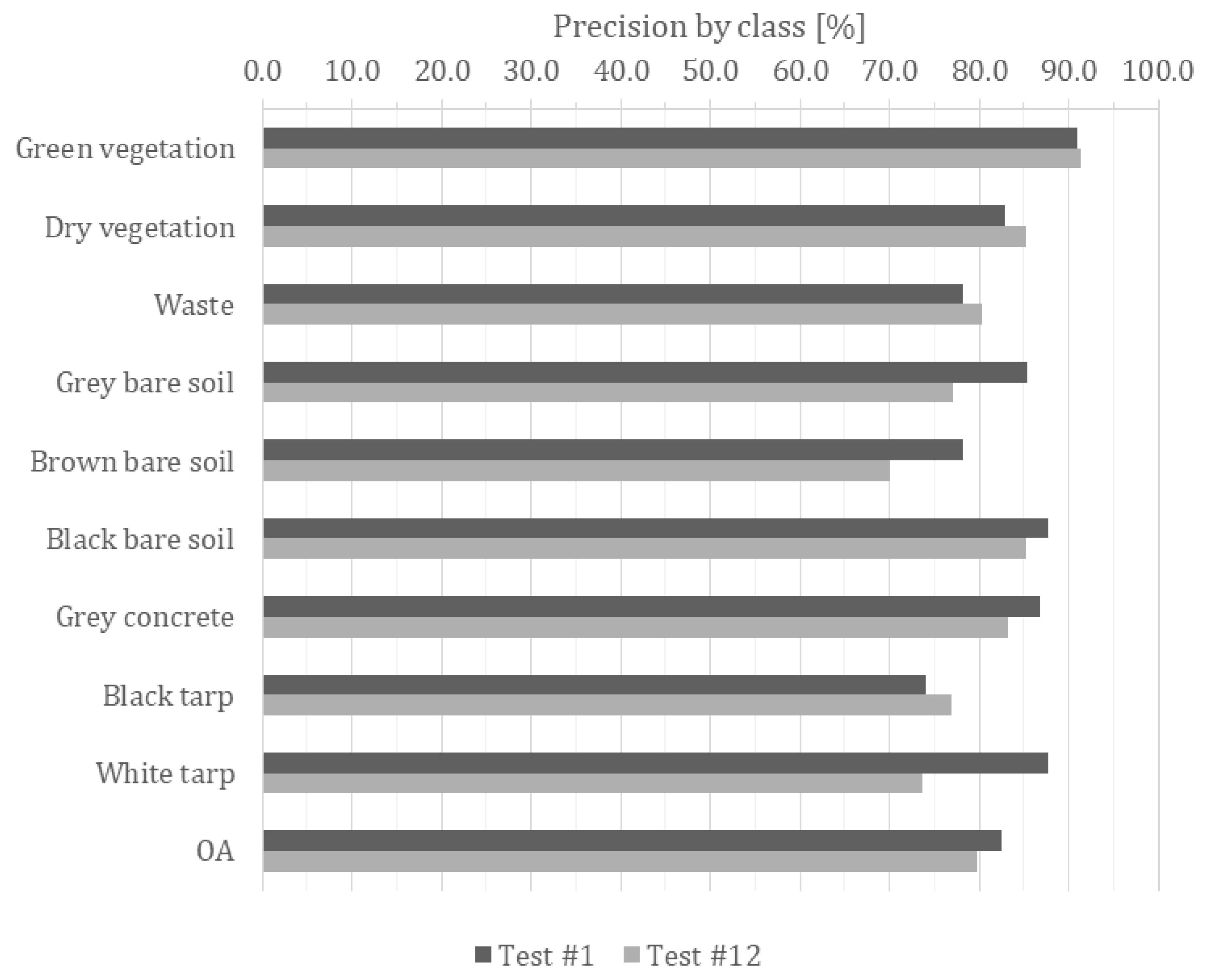
3.1. Robustness
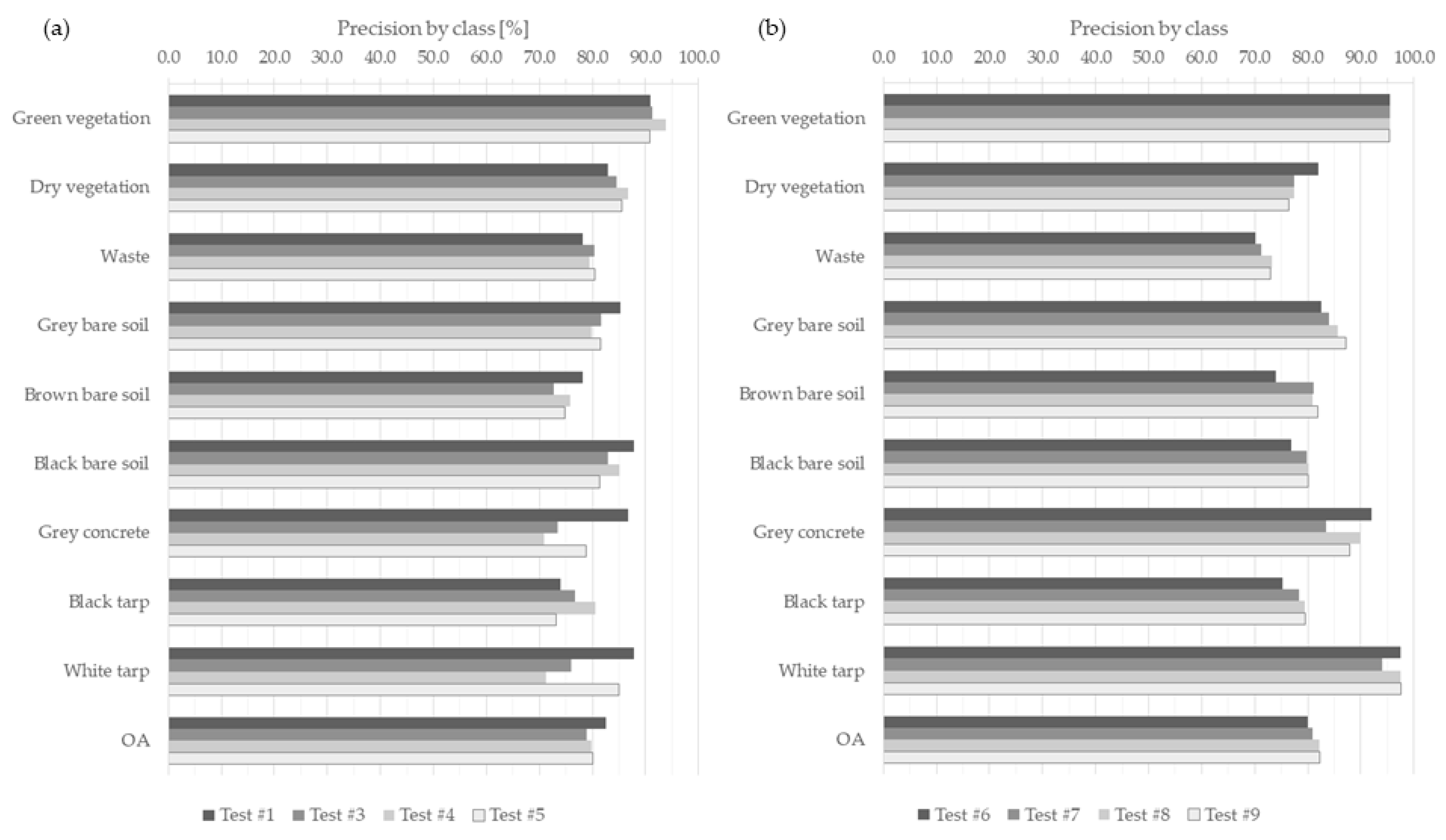
3.2. Sensitivity to Segmentation Approach
3.3. Sensitivity to Textural Information
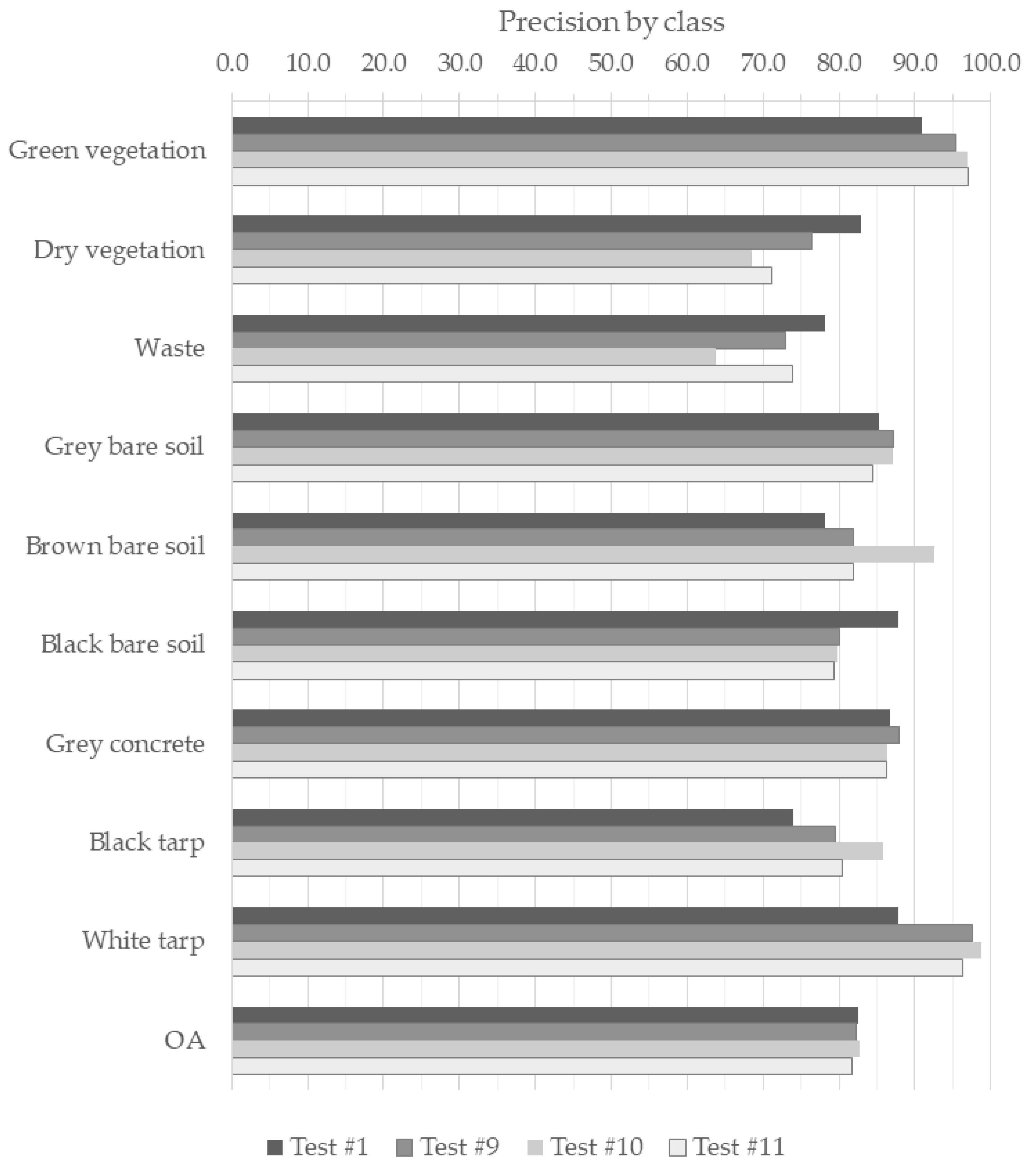
3.4. Sensitivity to Spectral Resolution
3.5. Sensitivity to Spatial Resolution
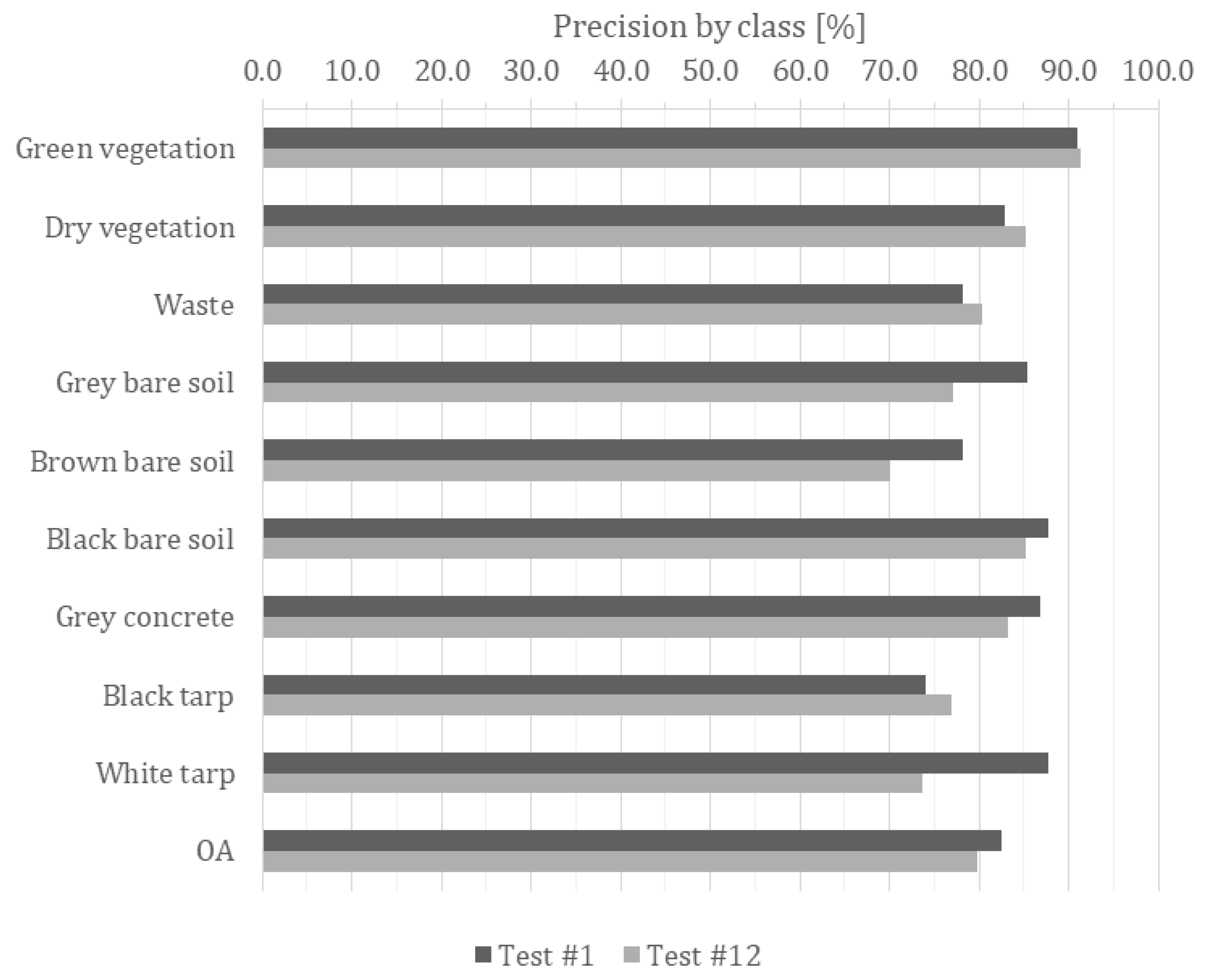
3.6. Sensitivity to Contextual Information
3.7. Features Contribution
4. Discussion
4.1. Robustness and Replicability of the Processing Chain
4.2. Data Acquisition Guidelines
4.3. Improving Classification Performances
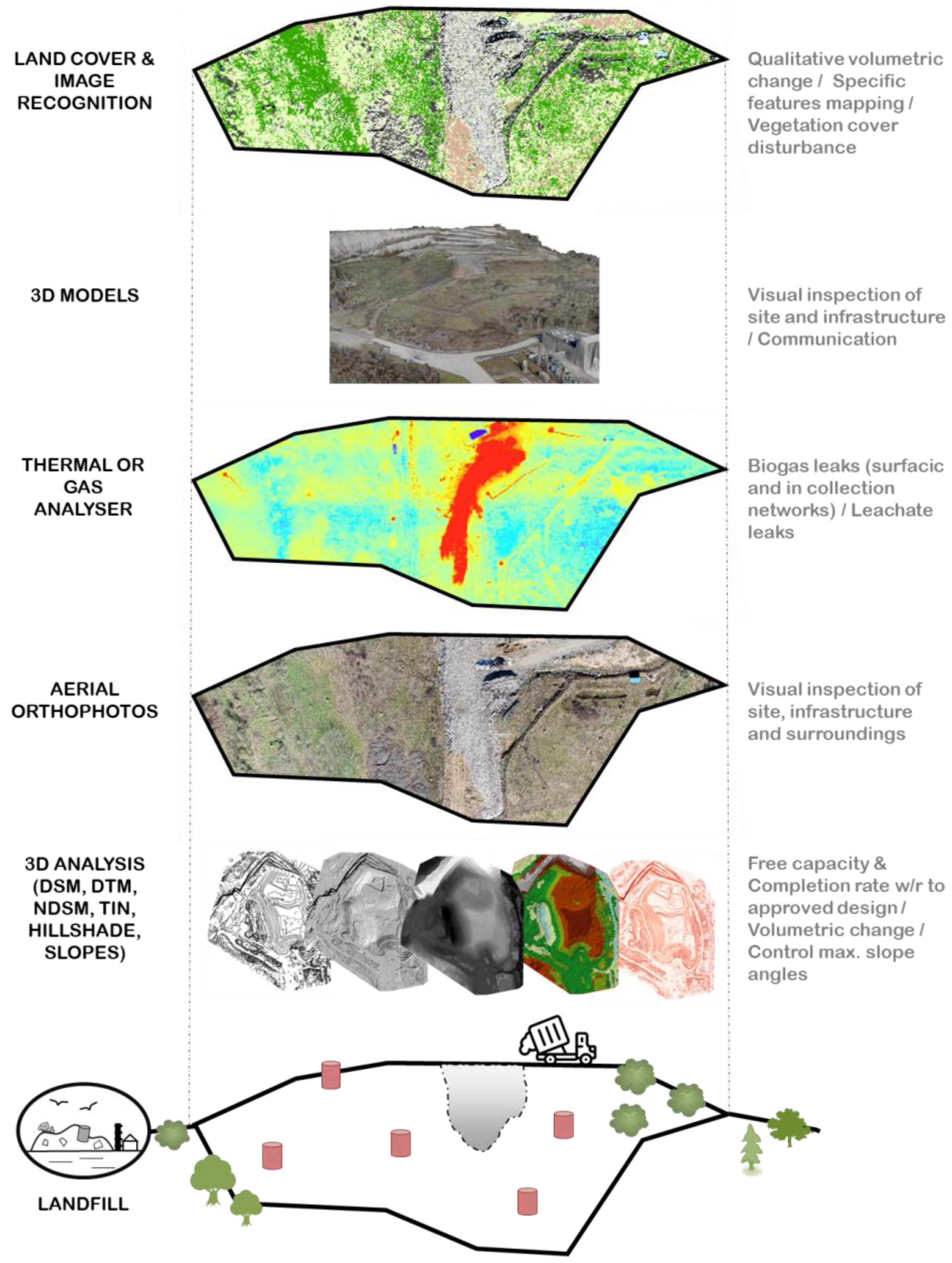
4.4. Integration of the Method into Landfill Control Actions
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Statbel, 2018. Available online: https://statbel.fgov.be/fr/themes/environnement/dechets-et-pollution/production-de-dechets (accessed on 12 December 2021).
- De Rijdt, A.; Neculau, C.; Wille, E. The rawfill concept: An integrated methodology and toolbox for selecting and launching enhanced landfill mining (elfm) projects. In Proceedings of the 4th International Symposium On Enhanced Landfill Mining, Mechelen, Belgium, 5–7 February 2018. [Google Scholar]
- Battsengel, G.; Geetha, S.; Jeon, J. Analysis of Technological Trends and Technological Portfolio of Unmanned Aerial Vehicle. J. Open Innov. Technol. Mark. Complex. 2020, 6, 48. [Google Scholar] [CrossRef]
- Chen, S.; Laefer, D.; Mangina, E. State of Technology Review of Civilian UAVs. Recent Pat. Eng. 2016, 10, 160–174. [Google Scholar] [CrossRef] [Green Version]
- Majid, M.I.; Chen, Y.; Mahfooz, O.; Ahmed, W. UAV-Based Smart Environmental Monitoring. In Employing Recent Technologies for Improved Digital Governance; Information Science Reference: Hershey, PA, USA, 2020. [Google Scholar] [CrossRef]
- Shafiee, M.; Zhou, Z.; Mei, L.; Dinmohammadi, F.; Karama, J.; Flynn, D. Unmanned Aerial Drones for Inspection of Offshore Wind Turbines: A Mission-Critical Failure Analysis. Robotics 2021, 10, 26. [Google Scholar] [CrossRef]
- Tkáč, M.; Mésároš, P. Utilizing drone technology in the civil engineering. Sel. Sci. Pap. J. Civ. Eng. 2019, 14, 27–37. [Google Scholar] [CrossRef] [Green Version]
- Štroner, M.; Urban, R.; Seidl, J.; Reindl, T.; Brouček, J. Photogrammetry Using UAV-Mounted GNSS RTK: Georeferencing Strategies without GCPs. Remote Sens. 2021, 13, 1336. [Google Scholar] [CrossRef]
- Nagendran, S.; Mohamad, I.; Mohd, A. Application of UAV photogrammetry for quarry monitoring. War. Geologi. 2020, 46. [Google Scholar] [CrossRef]
- Kim, J.; Kim, S.; Ju, C.; Son, H.I. Unmanned Aerial Vehicles in Agriculture: A Review of Perspective of Platform, Control, and Applications. IEEE Access 2019, 7, 105100–105115. [Google Scholar] [CrossRef]
- Michez, A.; Piégay, H.; Lisein, J.; Claessens, H.; Lejeune, P. Classification of riparian forest species and health condition using multi-temporal and hyperspatial imagery from unmanned aerial system. Environ. Monit Assess 2016, 188, 146. [Google Scholar] [CrossRef] [Green Version]
- Sliuzar, N.; Filkin, T.; Huber-Humer, M.; Ritzkowski, M. Drone technology in municipal solid waste management and landfilling: A comprehensive review. Waste Manag. 2022, 139, 1–16. [Google Scholar] [CrossRef]
- Gonçalves, G.; Andriolo, U.; Pinto, L.; Bessa, B. Mapping marine litter using UAS on a beach-dune: A multidisciplinary approach. Sci. Total Environ. 2022, 706, 135742. [Google Scholar] [CrossRef]
- Bak, S.H.; Hwang, D.H.; Kim, H.M.; Yoon, H.J. Detection and monitoring of beach litter using uav image and deep neural network. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, XLII-3/W8, 55–58. [Google Scholar] [CrossRef] [Green Version]
- Fallati, L.; Polidori, A.; Salvatore, C.; Saponari, L.; Savini, A.; Galli, P. Anthropogenic marine debris assessment with unmanned aerial vehicle imagery and deep learning: A case study along the beaches of the Republic of Maldives. Sci. Total Environ. 2019, 693, 133581. [Google Scholar] [CrossRef] [PubMed]
- Wyard, C.; Beaumont, B.; Grippa, T.; Georganos, S.; Hallot, E. UAVs for fine-scale Open-Source Landfill Mapping. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium IGARSS, Brussels, Belgium, 11–16 July 2021. [Google Scholar] [CrossRef]
- Xia, W.; Jiang, Y.; Chen, X.; Zhao, R. Application of machine learning algorithms in municipal solid waste management: A mini review. Waste Manag. Res. 2021, 40, 609–624. [Google Scholar] [CrossRef] [PubMed]
- Abu Qdais, H.; Shatnawi, N. Assessing and predicting landfill surface temperature using remote sensing and an artificial neural network. Int. J. Remote Sens. 2019, 40, 9556–9571. [Google Scholar] [CrossRef]
- Horning, N.; Fleishman, E.; Ersts, P.J.; Fogarty, F.A.; Wohlfeil Zillig, M. Mapping of land cover with open-source software and ultra-high-resolution imagery acquired with unmanned aerial vehicles. Remote Sens. Ecol. Conserv. 2020, 6, 487–497. [Google Scholar] [CrossRef] [Green Version]
- Sibaruddin, H.I.; Shafri, H.Z.M.; Pradhan, B.; Haron, N.A. Comparison of pixel-based and object-based image classification techniques in extracting information from UAV imagery data. IOP Conf. Ser. Earth Environ. Sci. 2018, 169, 012098. [Google Scholar] [CrossRef]
- De Giglio, M.; Greggio, N.; Goffo, F.; Merloni, N.; Dubbini, M.; Barbarella, M. Comparison of pixel-and object-based classification methods of unmanned aerial vehicle data applied to coastal dune vegetation communities: Casal borsetti case study. Remote Sens. 2019, 11, 1416. [Google Scholar] [CrossRef] [Green Version]
- Grippa, T.; Lennert, M.; Beaumont, B.; Vanhuysse, S.; Stephenne, N.; Wolff, E. An open-source semi-automated processing chain for urban object-based classification. Remote Sens. 2017, 9, 358. [Google Scholar] [CrossRef] [Green Version]
- Georganos, S.; Brousse, O.; Dujardin, S.; Linard, C.; Casey, D.; Milliones, M.; Parmentier, B.; Van Lipzig, N.P.; Demuzere, M.; Grippa, T.; et al. Modelling and mapping the intra-urban spatial distribution of Plasmodium falciparum parasite rate using very-high-resolution satellite derived indicators. Int. J. Health Geogr. 2020, 19, 38. [Google Scholar] [CrossRef]
- Beaumont, B.; Grippa, T.; Lennert, M.; Vanhuysse, S.; Stephenne, B.; Wolff, E. Toward an operational framework for fine-scale urban land-cover mapping in Wallonia using submeter remote sensing and ancillary vector data. J. Appl. Remote Sens. 2017, 11, 036011. [Google Scholar] [CrossRef] [Green Version]
- Bassine, C.; Radoux, J.; Beaumont, B.; Grippa, T.; Lennert, M.; Champagne, C.; De Vroey, M.; Martinet, A.; Bouchez, O.; Deffense, B.; et al. First 1-M resolution land cover map labeling the overlap in the 3rd dimension: The 2018 map of Wallonia. Data 2020, 5, 117. [Google Scholar] [CrossRef]
- Wijesingha, J.; Astor, T.; Schulze-Brüninghoff, D.; Wachendorf, M. Mapping Invasive Lupinus polyphyllus Lindl. in Semi-natural Grasslands Using Object-Based Image Analysis of UAV-borne Images. PFG 2020, 88, 391–406. [Google Scholar] [CrossRef]
- Souffer, I.; Sghiouar, M.; Sebari, I.; Zefri, Y.; Hajji, H.; Aniba, G. Automatic Extraction of Photovoltaic Panels from UAV Imagery with Object-Based Image Analysis and Machine Learning. In WITS 2020. Lecture Notes in Electrical Engineering; Bennani, S., Lakhrissi, Y., Khaissidi, G., Mansouri, A., Khamlichi, Y., Eds.; Springer: Singapore, 2022; Volume 745. [Google Scholar] [CrossRef]
- Kwak, G.H.; Park, N.W. Impact of texture information on crop classification with machine learning and UAV images. Appl. Sci. 2019, 9, 643. [Google Scholar] [CrossRef] [Green Version]
- DJI®® Mavic 2 Enterprise Specs. Available online: https://www.dji.com/mavic-2-enterprise/specs (accessed on 23 March 2022).
- RedEdge MX Dual Camera Imaging System by MicaSence. Available online: https://micasense.com/dual-camera-system/ (accessed on 23 March 2022).
- Zenmuse X5 Specs. Available online: https://www.dji.com/be/zenmuse-x5/info#specs (accessed on 23 March 2022).
- PIX4D. Available online: https://www.pix4d.com/ (accessed on 23 March 2022).
- DJI GS PRO. Available online: https://www.dji.com/be/ground-station-pro (accessed on 23 March 2022).
- GRX1 GNSS Receiver. Available online: https://eu.sokkia.com/sokkia-care-products/grx1-gnss-receiver (accessed on 23 March 2022).
- Portail Walcors. Available online: https://gnss.wallonie.be/walcors.html (accessed on 23 March 2022).
- Georganos, S.; Grippa, T.; Vanhuysse, S.; Lennert, M.; Shimoni, M.; Kalogirou, S.; Wolff, E. Less is more: Optimizing classification performance through feature selection in a very-high-resolution remote sensing object-based urban application. GIScience Remote Sens. 2018, 55, 221–242. [Google Scholar] [CrossRef]
- Momsen, E.; Metz, M.; GRASS Development Team. Addon i.segment. In Geographic Resources Analysis Support System (GRASS) Software, Version 7.8; Open Source Geospatial Foundation: Chicago, IL, USA, 2020. [Google Scholar]
- Radhakrishna, A.; Shaji, A.; Smith, K.; Lucchi, A.; Fua, P.; Susstrunk, S. SLIC Superpixels; Technical Report no. 149300; EPFL: Lausanne, Switzerland, 2010. [Google Scholar]
- Haralick, R.M.; Shanmugam, K.; Dinstein, I. Textural features for image classification. IEEE Trans. Syst. Man Cybern. 1973, 6, 610–621. [Google Scholar] [CrossRef] [Green Version]
- Haralick, R. Statistical and structural approaches to texture. Proc. IEEE 1979, 67, 786–804. [Google Scholar] [CrossRef]
- Lennert, M.; GRASS Development Team. Addon v.class.mlR. In Geographic Resources Analysis Support System (GRASS) Software, Version 7.8; Open Source Geospatial Foundation: Chicago, IL, USA, 2020. [Google Scholar]
- Li, M.; Ma, L.; Blaschke, T.; Cheng, L.; Tiede, D. A systematic comparison of different object-based classification techniques using high spatial resolution imagery in agricultural environments. Int. J. Appl. Earth Obs. Geoinf. 2016, 49, 87–98. [Google Scholar] [CrossRef]
- Crommelinck, S.; Bennett, R.; Gerke, M.; Koeva, M.N.; Yang, M.Y.; Vosselman, G. SLIC superpixels for object delineation from UAV data. In Proceedings of the ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences: International Conference on Unmanned Aerial Vehicles in Geomatics (UAV-G 2017), Bonn, Germany, 4–7 September 2017; Volume 4. [Google Scholar] [CrossRef] [Green Version]
- Kishorjit Singh, N.; Johny Singh, N.; Kanan Kumar, W. Image classification using SLIC superpixel and FAAGKFCM image segmentation. IET Image Processing 2020, 14, 487–494. [Google Scholar] [CrossRef]
- Hsu, C.Y.; Ding, J.J. Efficient image segmentation algorithm using SLIC superpixels and boundary-focused region merging. In Proceedings of the 2013 9th International Conference on Information, Communications & Signal Processing, Tainan, Taiwan, 10–13 December 2013; pp. 1–5. [Google Scholar] [CrossRef]
- Wu, H.; Wu, Y.; Zhang, S.; Li, P.; Wen, Z. Cartoon image segmentation based on improved SLIC superpixels and adaptive region propagation merging. In Proceedings of the 2016 IEEE International Conference on Signal and Image Processing (ICSIP), Beijing, China, 13–15 August 2016; pp. 277–281. [Google Scholar] [CrossRef]
- Zhang, S.; You, Z.; Wu, X. Plant disease leaf image segmentation based on superpixel clustering and EM algorithm. Neural Comput. Appl. 2019, 31, 1225–1232. [Google Scholar] [CrossRef]
- Radoux, J.; Lamarche, C.; Van Bogaert, E.; Bontemps, S.; Brockmann, C.; Defourny, P. Automated Training Sample Extraction for Global Land Cover Mapping. Remote Sens. 2014, 6, 3965–3987. [Google Scholar] [CrossRef] [Green Version]
- Lu, Q.; Ma, Y.; Xia, G.-S. Active learning for training sample selection in remote sensing image classification using spatial information. Remote Sens. Lett. 2017, 8, 1210–1219. [Google Scholar] [CrossRef]
- Natesan, S.; Armenakis, C.; Benari, G.; Lee, R. Use of UAV-borne spectrometer for land cover classification. Drones 2018, 2, 16. [Google Scholar] [CrossRef] [Green Version]
- Adão, T.; Hruška, J.; Pádua, L.; Bessa, J.; Peres, E.; Morais, R.; Sousa, J.J. Hyperspectral imaging: A review on UAV-based sensors, data processing and applications for agriculture and forestry. Remote Sens. 2016, 9, 1110. [Google Scholar] [CrossRef] [Green Version]
- Filkin, T.; Sliusar, N.; Ritzkowski, M.; Huber-Humer, M. Unmanned Aerial Vehicles for Operational Monitoring of Landfills. Drones 2021, 5, 125. [Google Scholar] [CrossRef]
- Kalantar, B.; Mansor, S.B.; Sameen, M.I.; Pradhan, B.; Shafri, H.Z.M. Drone-based land-cover mapping using a fuzzy unordered rule induction algorithm integrated into object-based image analysis. Int. J. Remote Sens. 2017, 38, 2535–2556. [Google Scholar] [CrossRef]
- Osco, L.P.; Junior, J.M.; Ramos, A.P.M.; de Castro Jorge, L.A.; Fatholahi, S.N.; de Andrade Silva, J.; Matsubara, E.T.; Pistori, H.; Gonçalve, W.N.; Li, J. A review on deep learning in UAV remote sensing. Int. J. Appl. Earth Obs. Geoinf. 2021, 102, 102456. [Google Scholar] [CrossRef]
- Çayir, A.; Yenidoğan, I.; Dağ, H. Feature extraction based on deep learning for some traditional machine learning methods. In Proceedings of the 2018 3rd International Conference on Computer Science and Engineering (UBMK), Sarajevo, Bosnia, 20–23 September 2018; pp. 494–497. [Google Scholar] [CrossRef]
- Karim, Z.; van Zyl, T. Deep Learning and Transfer Learning applied to Sentinel-1 DInSAR and Sentinel-2 optical satellite imagery for change detection. In Proceedings of the 2020 International SAUPEC/RobMech/PRASA Conference, Cape Town, South Africa, 29–31 January 2020; pp. 1–7. [Google Scholar] [CrossRef]
- Incekara, A.; Delen, A.; Seker, D.; Goksel, C. Investigating the utility potential of low-cost unmanned aerial vehicles in the temporal monitoring of a landfill. ISPRS Int. J. Geo-Inf. 2019, 8, 22. [Google Scholar] [CrossRef] [Green Version]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| # Dataset | Date | Vector-Sensor | Height AGL [m] | Frontal-Side Overlap [%] | Camera Angle [°] | Spatial Res. [cm] | Spectral Res. [nm] | Coverage [ha] | # Images | # Flights |
|---|---|---|---|---|---|---|---|---|---|---|
| 0 | 3 October 2019—11 h 53–12 h 36 | Mavic DJI M600 Pro—DJI Zenmuse X5 | 90 | 80–70 | 70 | 2.8 | Blue, green, and red | 27.6 | 710 | 2 |
| 1 | 1 March 2021—11 h 36–13 h 14 | DJI Mavic 2 Enterprise 00-14MV | 90 | 75–75 | 70 | 3.8 | Blue, green, and red | 56.1 | 954 | 4 |
| 2 | 1 March 2021—13 h 32–14 h 32 | Mavic DJI M600 Pro—Micasense RedEdge MX Dual Camera System | 45 | 75–75 | 70 | 3.2 | RedEdge MX: blue (center wavelength: 475 nm (bandwidth: 32 nm)), green (560 (27)), red (668 (14)), red-edge (717 (12)), and NIR channels (842 (57)). RedEdge MX Blue: aerosol (444 (28)), green (431 (14)), red (650 (16)), red-edge channels (705 (10), and 740 (18)). | 15.2 | 25,862 | 2 |
| LC Class | Training Set Size | Test Set Size |
|---|---|---|
| Green vegetation | 70 | 33 |
| Dry vegetation | 70 | 30 |
| Waste | 70 | 54 |
| Grey bare soil | 70 | 32 |
| Brown bare soil | 70 | 58 |
| Black bare soil | 70 | 98 |
| Grey concrete roads and buildings | 70 | 25 |
| Black tarp | 70 | 54 |
| White tarp | 70 | 41 |
| Experiment | Test Id | # Dataset | Input Raster | Segmentation Type and Parameters | OA [%] | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| Robustness | Segmentation | Texture | Spectral Info. | Spatial res. | Context Info | |||||
| X | 0 * | 0 | RGB + Slope + 8 texture indexes computed from a pseudo-panchromatic band * | i.segment, threshold = 0.06, minsize = 20 * | 80.5 * | |||||
| X | X | X | X | X | 1 | 1 | RGB + Slope + 8 texture indexes computed from a pseudo-panchromatic band * | i.segment, threshold = 0.06, minsize = 20 * | 82.6 | |
| X | 2 | 1 | Same as Test 1 | Superpixel + i.segment | 79.5 | |||||
| X | 3 | 1 | RGB + Slope + 3 texture indexes (ASM, CONTR, SA) computed for each spectral band | Same as Test 1 | 78.8 | |||||
| X | 4 | 1 | RGB + Slope + 5 texture indexes (ASM, CONTR, CORR, DV, SA) computed for each spectral band | Same as Test 1 | 79.8 | |||||
| X | 5 | 1 | RGB + Slope + 8 texture indexes computed for each spectral band | Same as Test 1 | 80.0 | |||||
| X | 6 | 2 | MX 10 Bands + Slope + 8 texture indexes computed from a pseudo-panchromatic band | Same as Test 1 | 80.0 | |||||
| X | 7 | 2 | MX 5 Bands + Slope + 3 texture indexes (ASM, CONTR, SA) computed for each spectral band | Same as Test 1 | 80.9 | |||||
| X | 8 | 2 | MX 5 Bands + Slope + 5 texture indexes (ASM, CONTR, CORR, DV, SA) computed for each spectral band | Same as Test 1 | 82.2 | |||||
| X | X | 9 | 2 | MX 5 Bands + Slope + 8 texture indexes computed for each spectral band | Same as Test 1 | 82.4 | ||||
| X | 10 | 2 | MX Blue 5 Bands + Slope + 8 texture indexes computed for each spectral band | Same as Test 1 | 82.8 | |||||
| X | 11 | 2 | MX 10 Bands + Slope + 8 texture indexes computed for each spectral band | Same as Test 1 | 81.2 | |||||
| X | 12 | 1 ** | Same as Test 1 | Same as Test 1 | 79.7 | |||||
| X | 13 *** | 1 | Same as Test 1 | Same as Test 1 | 88.5 | |||||
| Classification | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 11 | 12 | 21 | 31 | 32 | 33 | 41 | 42 | 43 | SUM | PA [%] | Class Prec. [%] | |||
| Reference | Green vegetation | 11 | 32 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 33 | 97.0 | 95.5 |
| Dry vegetation | 12 | 0 | 28 | 0 | 0 | 2 | 0 | 0 | 0 | 0 | 30 | 93.3 | 91.8 | |
| Waste | 21 | 1 | 2 | 43 | 0 | 6 | 0 | 0 | 2 | 0 | 54 | 79.6 | 89.8 | |
| Grey bare soil | 31 | 0 | 0 | 0 | 31 | 0 | 0 | 1 | 0 | 0 | 32 | 96.9 | 91.5 | |
| Brown bare soil | 32 | 1 | 1 | 0 | 5 | 50 | 0 | 0 | 1 | 0 | 58 | 86.2 | 85.5 | |
| Black bare soil | 33 | 0 | 0 | 0 | 0 | 1 | 94 | 0 | 3 | 0 | 98 | 95.9 | 96.9 | |
| Grey concrete constructions | 41 | 0 | 0 | 0 | 0 | 0 | 0 | 25 | 0 | 0 | 25 | 100.0 | 76.6 | |
| Black tarp | 42 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 53 | 0 | 54 | 98.1 | 94.0 | |
| White tarp | 43 | 0 | 0 | 0 | 0 | 0 | 0 | 21 | 0 | 20 | 41 | 48.8 | 74.4 | |
| SUM | 34 | 31 | 43 | 36 | 59 | 96 | 47 | 59 | 20 | 425 | ||||
| UA [%] | 97.0 | 94.1 | 90.3 | 100.0 | 86.1 | 84.7 | 97.9 | 53.2 | 89.8 | 100.0 | OA = 88.5% | |||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wyard, C.; Beaumont, B.; Grippa, T.; Hallot, E. UAV-Based Landfill Land Cover Mapping: Optimizing Data Acquisition and Open-Source Processing Protocols. Drones 2022, 6, 123. https://doi.org/10.3390/drones6050123
Wyard C, Beaumont B, Grippa T, Hallot E. UAV-Based Landfill Land Cover Mapping: Optimizing Data Acquisition and Open-Source Processing Protocols. Drones. 2022; 6(5):123. https://doi.org/10.3390/drones6050123
Chicago/Turabian StyleWyard, Coraline, Benjamin Beaumont, Taïs Grippa, and Eric Hallot. 2022. "UAV-Based Landfill Land Cover Mapping: Optimizing Data Acquisition and Open-Source Processing Protocols" Drones 6, no. 5: 123. https://doi.org/10.3390/drones6050123
APA StyleWyard, C., Beaumont, B., Grippa, T., & Hallot, E. (2022). UAV-Based Landfill Land Cover Mapping: Optimizing Data Acquisition and Open-Source Processing Protocols. Drones, 6(5), 123. https://doi.org/10.3390/drones6050123