



Towards Resilient UAV Swarms—A Breakdown of Resiliency Requirements in UAV Swarms



Abstract
1. Introduction
- Resilience as a rebound
- Resilience as robustness
- Resilience as graceful extensibility
- Resilience as sustained adaptability
1.1. Challenges to Building Resilient Swarms
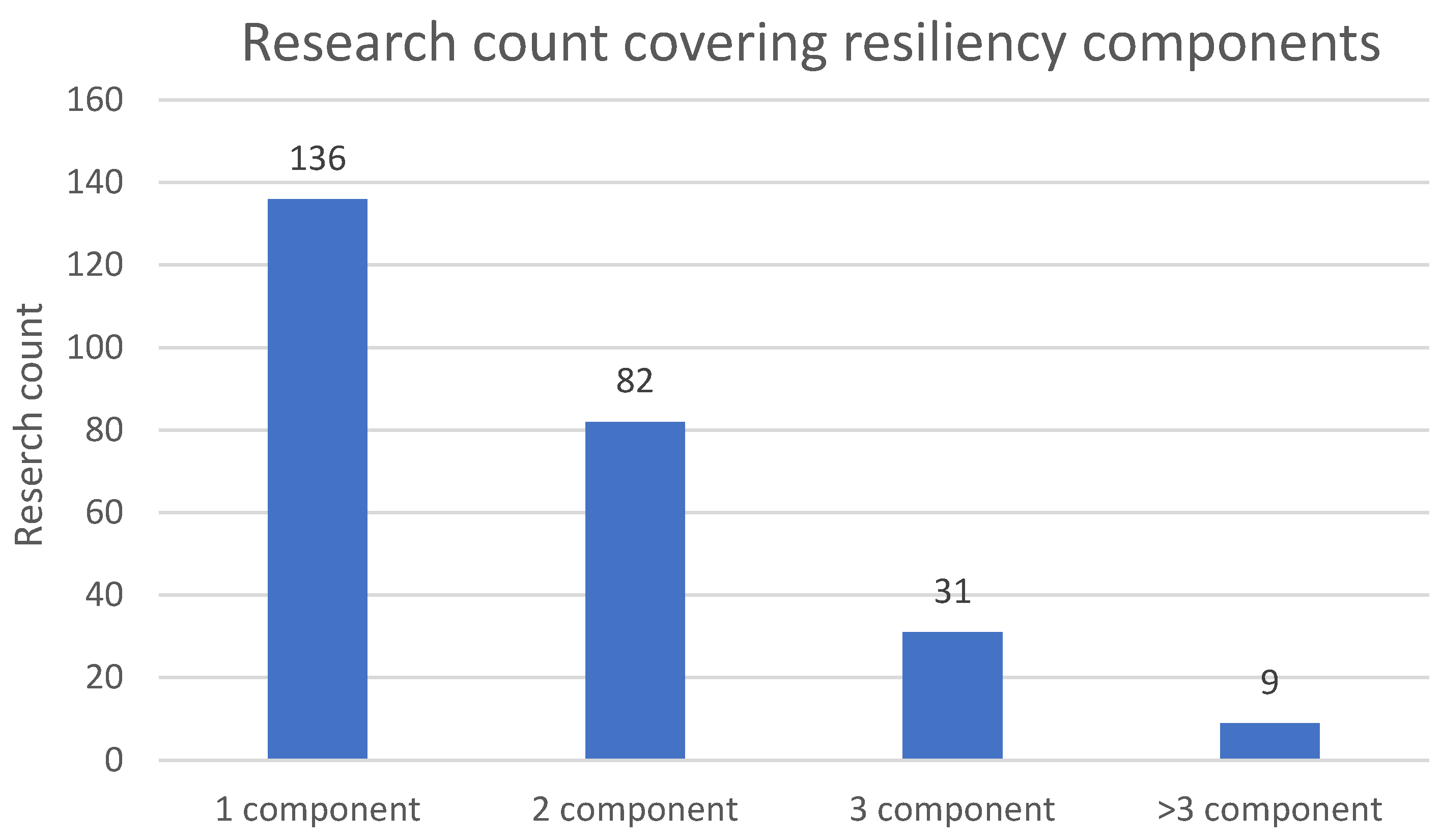
- All UAV components are not considered for resiliency incorporation
- All disruptions in their operational space are not considered.
- Resiliency concepts developed for individual agents are attempted to be scaled and applied to a swarm.
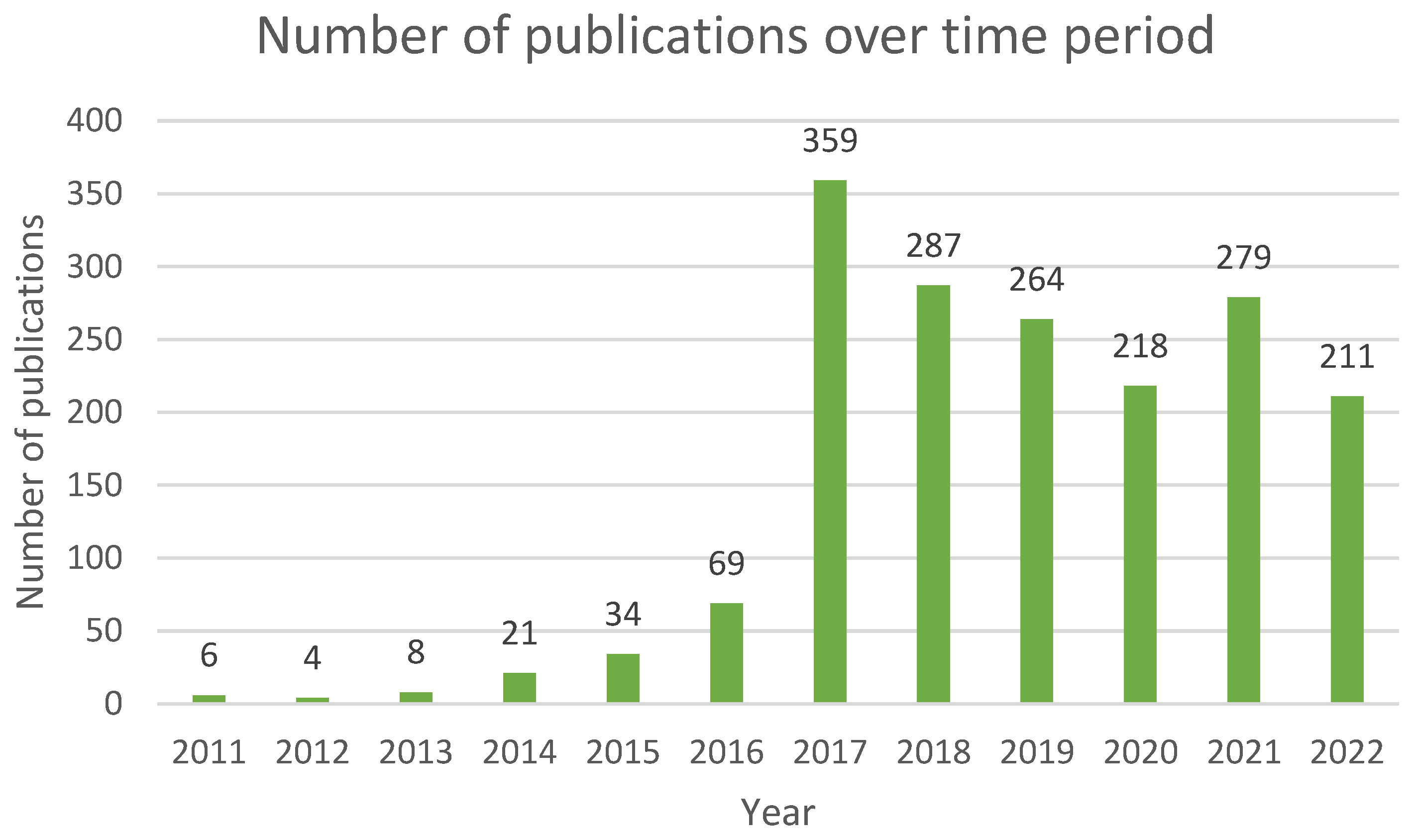
1.2. Analysis of Current Research Trends
1.3. Scope and Contributions
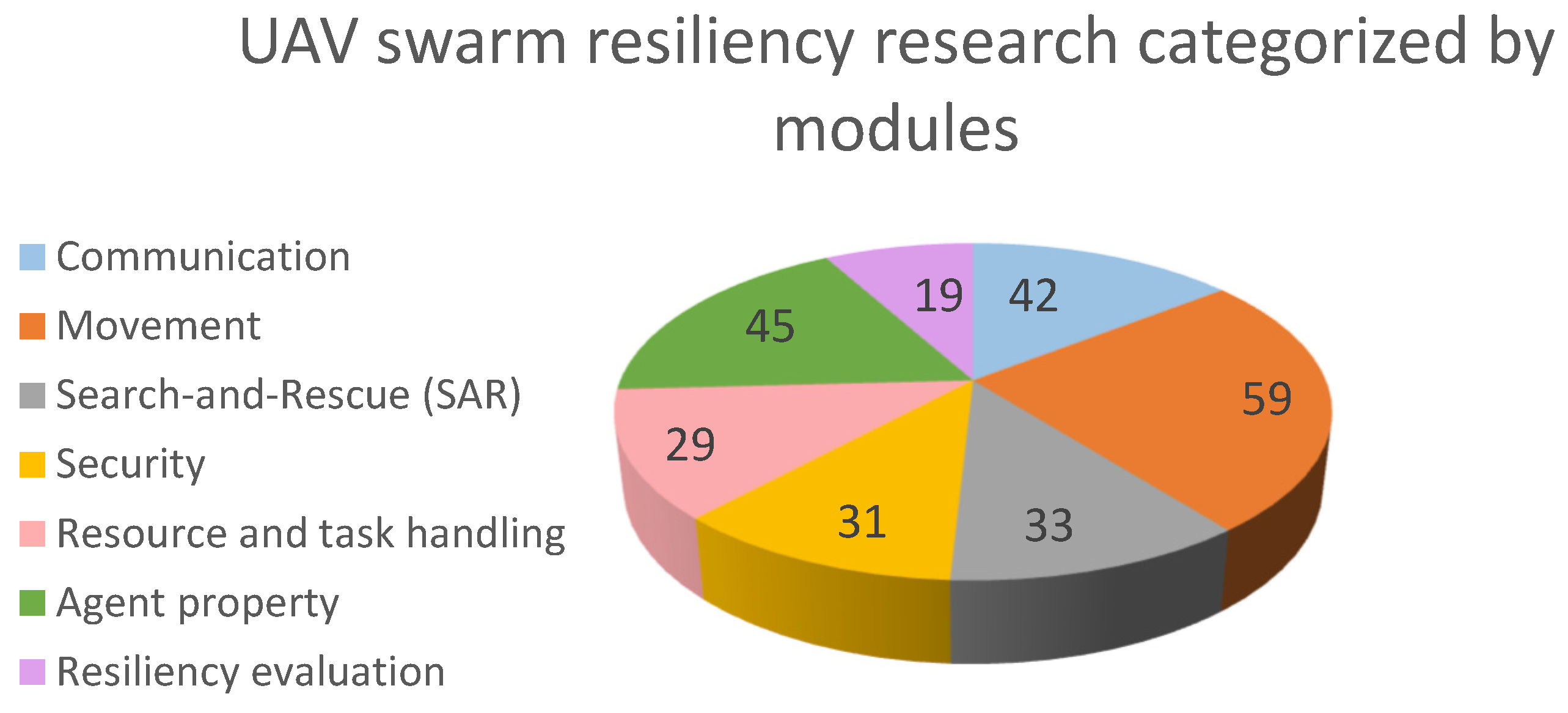
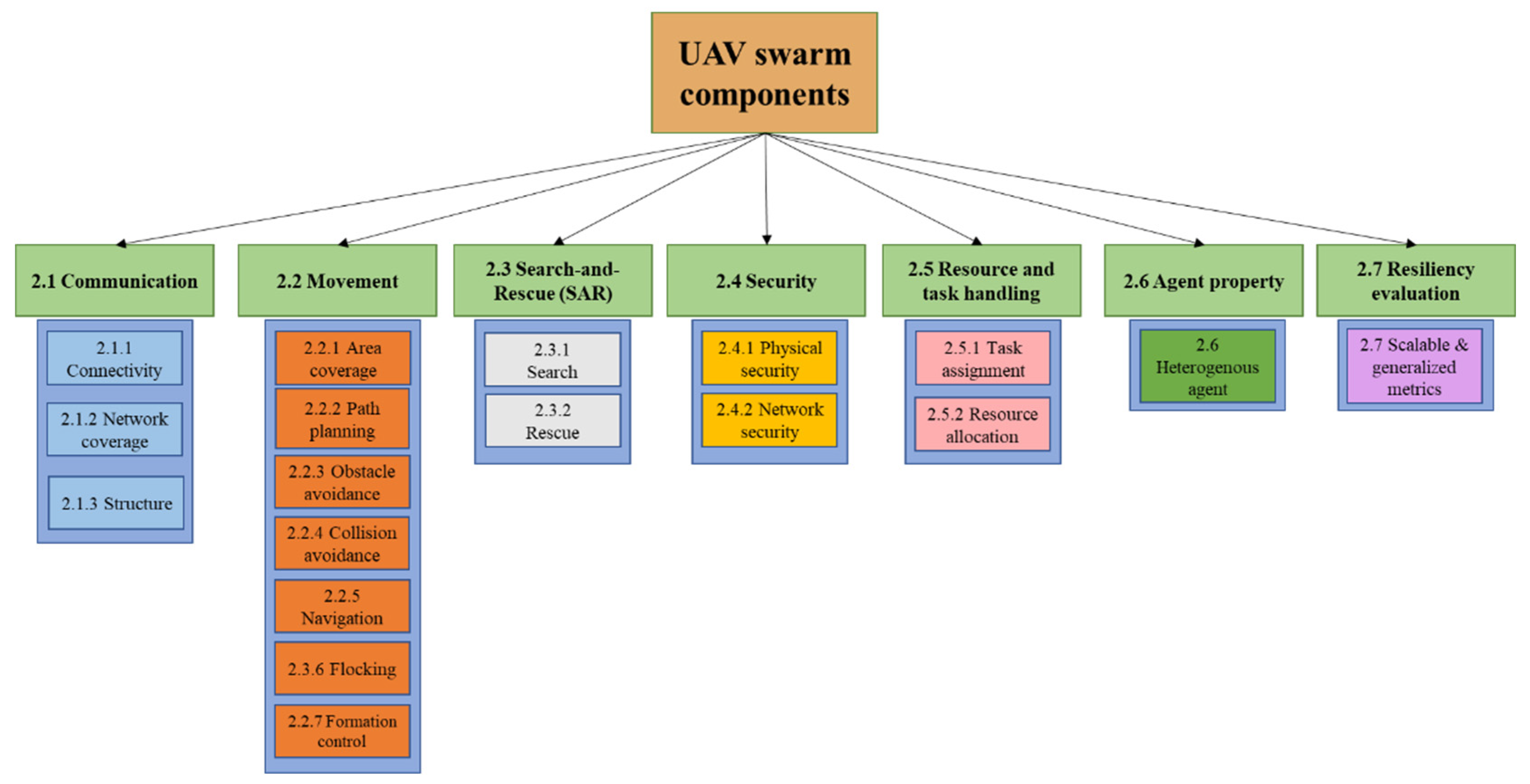
2. Resilient UAV Swarm Components and Modules
2.1. Communication
2.1.1. Connectivity
2.1.2. Network Coverage
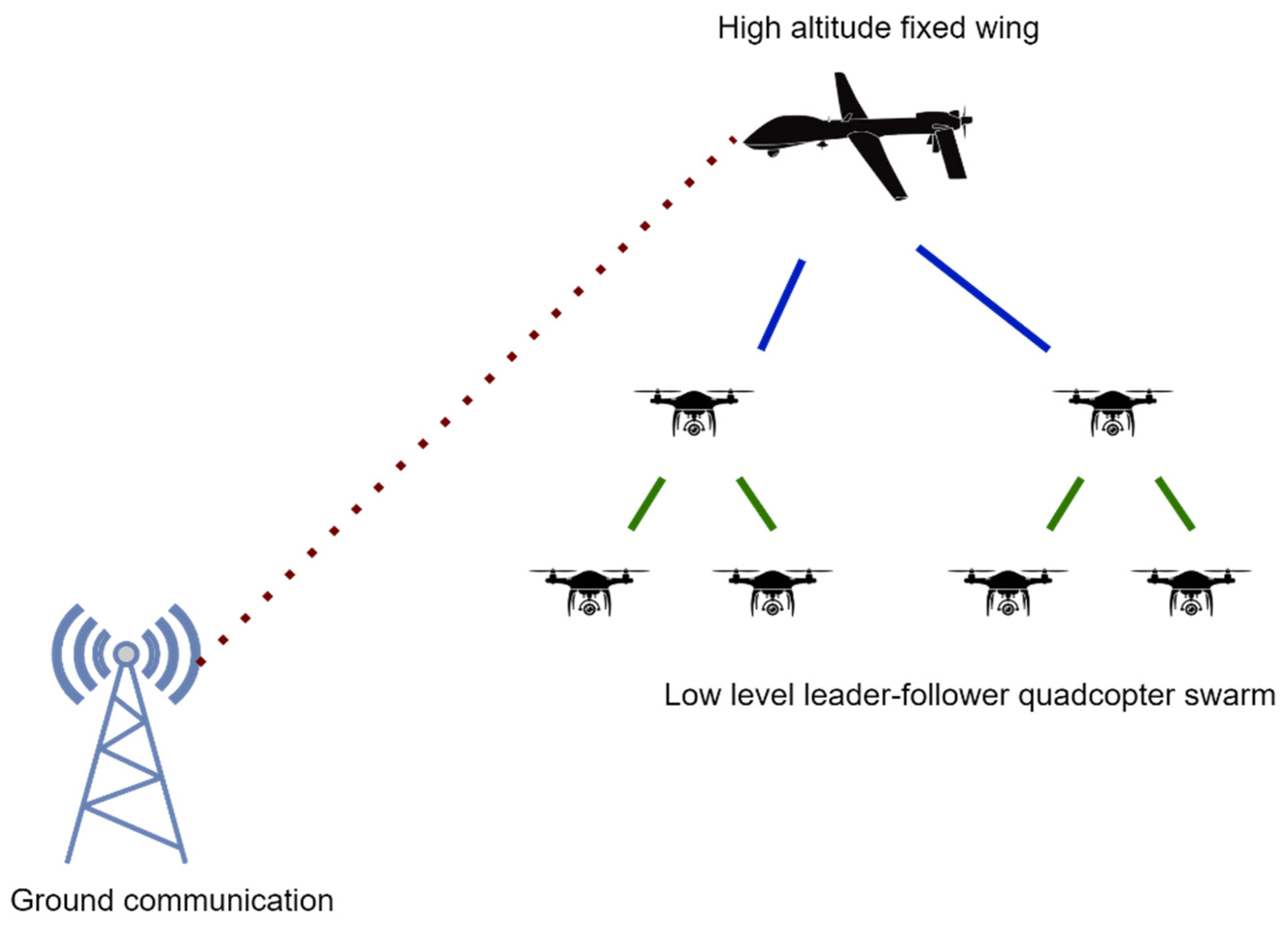
2.1.3. Network Structure and Characteristics
2.2. Movement
2.2.1. Area Coverage
2.2.2. Path Planning
2.2.3. Obstacle Avoidance
2.2.4. Collision Avoidance
2.2.5. Navigation and Localization
2.2.6. Flocking
2.2.7. Formation Control
2.3. Search-and-Rescue (SAR)
- Target search and tracking for entities that are not a part of the swarm.
- Track and search for agents of the swarm to open further conditional processes related to mission progress.
2.4. Security
2.4.1. Physical Security
- Counteraction of UAV swarms against malicious agents trying to take down agents in the swarm
- Counterattack of UAV swarms against malicious agents trying to enter a restricted airspace
2.4.2. Network Security
2.5. Resource and Task Handling
2.5.1. Task Assignment
2.5.2. Resource Allocation
2.6. Agent Property
- By operational space of agents
- By nature of agents
- By hardware of agents
2.7. Resiliency Evaluation
- The swarm does not check for agent wellbeing after it determines that the attack has ended.
- In the case that an agent is lost, there are no search and recovery procedures.
- Mission progress may be lost when swarm control completes task re-assignment. In this case, depending upon the scenario tasks such as localization, area decomposition and data collection may need to be restarted after the loss of data is examined.
3. Open Issues and Future Research Directions
4. Discussion and Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| ABS | Aerial Base Station |
| BSA | Backtracking Search Algorithm |
| CNS | Communication, Navigation, Surveillance |
| DTRP | Dynamic Topology Reconstruction Protocol |
| DaaS | Drones as a Service |
| FANET | Flying Ad Hoc Networks |
| FOA | Fruit fly Optimization Algorithm |
| GNSS | Global Navigation Satellite System |
| IDS | Intrusion Detection System |
| IMU | Inertial Measurement Unit |
| MANET | Mobile Ad hoc Network |
| MAS | Multi Agent system |
| MUSCOP | Mission based UAV Swarm Coordination Protocol |
| MAV | Micro Aerial Vehicle |
| MBCAP | Mission Based Collision Avoidance Protocol |
| PAMTS | Profit Driven Adaptive Moving Target Search |
| PSO | Particle Swarm Optimization |
| P2P | Peer to Peer |
| PBFT | Practical Byzantine Fault Tolerance |
| QR | Quick Response |
| RSSI | Received Signal Strength Indication |
| ROI | Region of Interest |
| SAI | Surveillance Area Importance |
| SINR | Signal to Interference plus Noise Ratio |
| SAR | Search and Rescue |
| SDN | Software Defined Networking |
| TAP | Task Allocation Protocol |
| UAV | Unmanned Aerial Vehicle |
| UWSV | Unmanned Water Surface Vehicle |
| UGV | Unmanned Ground Vehicle |
| VANET | Vehicular Ad Hoc Network |
| WPA | Wolf Pack Algorithm |
References
- Rubio, F.; Valero, F.; Llopis-Albert, C. A review of mobile robots: Concepts, methods, theoretical framework, and applications. Int. J. Adv. Robot. Syst. 2019, 16, 172988141983959. [Google Scholar] [CrossRef]
- Santa Ana, R. Drones Survey Waning Red Tide. Available online: https://agrilifetoday.tamu.edu/2015/10/22/drones-survey-waning-red-tide-at-south-padre-island/ (accessed on 8 October 2022).
- Rieucau, G.; Kiszka, J.J.; Castillo, J.C.; Mourier, J.; Boswell, K.M.; Heithaus, M.R. Using unmanned aerial vehicle (UAV) surveys and image analysis in the study of large surface-associated marine species: A case study on reef sharks Carcharhinus melanopterus shoaling behaviour. J. Fish Biol. 2018, 93, 119–127. [Google Scholar] [CrossRef]
- Roldán, J.; Garcia-Aunon, P.; Garzón, M.; de León, J.; del Cerro, J.; Barrientos, A. Heterogeneous Multi-Robot System for Mapping Environmental Variables of Greenhouses. Sensors 2016, 16, 1018. [Google Scholar] [CrossRef]
- Tsouros, D.C.; Bibi, S.; Sarigiannidis, P.G. A Review on UAV-Based Applications for Precision Agriculture. Information 2019, 10, 349. [Google Scholar] [CrossRef]
- Anderson, K.; Gaston, K.J. Lightweight unmanned aerial vehicles will revolutionize spatial ecology. Front. Ecol. Environ. 2013, 11, 138–146. [Google Scholar] [CrossRef]
- Vincent, P.; Rubin, I. A Framework and Analysis for Cooperative Search Using UAV Swarms. In Proceedings of the 2004 ACM Symposium on Applied Computing (SAC ’04), Nicosia, Cyprus, 14–17 March 2004; Association for Computing Machinery: New York, NY, USA, 2004; pp. 79–86. [Google Scholar]
- Aljehani, M.; Inoue, M. Multi-UAV tracking and scanning systems in M2M communication for disaster response. In Proceedings of the 2016 IEEE 5th Global Conference on Consumer Electronics, Kyoto, Japan, 11–14 October 2016; IEEE: New York, NY, USA, 2016; pp. 1–2. [Google Scholar]
- Arafat, M.Y.; Moh, S. Routing Protocols for Unmanned Aerial Vehicle Networks: A Survey. IEEE Access 2019, 7, 99694–99720. [Google Scholar] [CrossRef]
- Isufaj, R.; Omeri, M.; Piera, M.A. Multi-UAV Conflict Resolution with Graph Convolutional Reinforcement Learning. Appl. Sci. 2022, 12, 610. [Google Scholar] [CrossRef]
- Woods, D.D. Four concepts for resilience and the implications for the future of resilience engineering. Spec. Issue Resil. Eng. 2015, 141, 5–9. [Google Scholar] [CrossRef]
- Mian, S.; Hill, J.; Mao, Z.-H. Optimal Control Techniques for Heterogeneous UAV Swarms. In Proceedings of the 2020 IEEE/AIAA 39th Digital Avionics Systems Conference (DASC), San Antonio, TX, USA, 11–15 October 2020; IEEE: New York, NY, USA, 2020; pp. 1–10. [Google Scholar]
- Madni, A.M.; Jackson, S. Towards a Conceptual Framework for Resilience Engineering. IEEE Syst. J. 2009, 3, 181–191. [Google Scholar] [CrossRef]
- Wears, R.L. Resilience Engineering: Concepts and Precepts. BMJ Qual. Saf. 2006, 15, 447–448. [Google Scholar] [CrossRef]
- Madni, A. Designing for resilience. In ISTI Lecture Notes on Advanced Topics in Systems Engineering; ISTI: Tokyo, Japan, 2007; pp. 20–35. [Google Scholar]
- Ron, W.; Hollnagel, E.; Woods, D.; Leveson, N. A typology of resilience situations. In Resilience Engineering: Concepts and Precepts; CRC Press: Boca Raton, FL, USA, 2006. [Google Scholar]
- Wolpert, D.H.; Macready, W.G. No free lunch theorems for optimization. IEEE Trans. Evol. Comput. 1997, 1, 67–82. [Google Scholar] [CrossRef]
- Majd, A.; Ashraf, A.; Troubitsyna, E.; Daneshtalab, M. Using Optimization, Learning, and Drone Reflexes to Maximize Safety of Swarms of Drones. In Proceedings of the 2018 IEEE Congress on Evolutionary Computation (CEC), Rio de Janeiro, Brazil, 8–13 July 2018; IEEE: New York, NY, USA, 2018; pp. 1–8. [Google Scholar]
- Macek, K.; Vasquez, D.; Fraichard, T.; Siegwart, R. Safe Vehicle Navigation in Dynamic Urban Scenarios. In Proceedings of the 2008 11th International IEEE Conference on Intelligent Transportation Systems, Beijing, China, 12–15 October 2008; IEEE: New York, NY, USA, 2008; pp. 482–489. [Google Scholar]
- Cooley, R.; Wolf, S.; Borowczak, M. Secure and Decentralized Swarm Behavior with Autonomous Agents for Smart Cities. In Proceedings of the 2018 IEEE International Smart Cities Conference (ISC2), Kansas City, MO, USA, 16–19 September 2018; IEEE: New York, NY, USA, 2018; pp. 1–8. [Google Scholar]
- Andrade, F.A.A.; Hovenburg, A.; de Lima, L.N.d.; Rodin, C.D.; Johansen, T.A.; Storvold, R.; Correia, C.A.M.; Haddad, D.B. Autonomous Unmanned Aerial Vehicles in Search and Rescue Missions Using Real-Time Cooperative Model Predictive Control. Sensors 2019, 19, 4067. [Google Scholar] [CrossRef]
- Liu, Y.; Qi, N.; Yao, W.; Zhao, J.; Xu, S. Cooperative Path Planning for Aerial Recovery of a UAV Swarm Using Genetic Algorithm and Homotopic Approach. Appl. Sci. 2020, 10, 4154. [Google Scholar] [CrossRef]
- Chen, X.; Tang, J.; Lao, S. Review of Unmanned Aerial Vehicle Swarm Communication Architectures and Routing Protocols. Appl. Sci. 2020, 10, 3661. [Google Scholar] [CrossRef]
- Berger, J.; Lo, N.; Barkaoui, M. Static target search path planning optimization with heterogeneous agents. Ann. Oper. Res. 2016, 244, 295–312. [Google Scholar] [CrossRef]
- Besada, J.A.; Bernardos, A.M.; Bergesio, L.; Vaquero, D.; Campana, I.; Casar, J.R. Drones-as-a-service: A management architecture to provide mission planning, resource brokerage and operation support for fleets of drones. In Proceedings of the 2019 IEEE International Conference on Pervasive Computing and Communications Workshops (PerCom Workshops), Kyoto, Japan, 11–15 March 2019; IEEE: New York, NY, USA, 2019; pp. 931–936. [Google Scholar]
- Dimensions. Available online: https://www.dimensions.ai/ (accessed on 19 October 2022).
- Tahir, A.; Böling, J.; Haghbayan, M.-H.; Toivonen, H.T.; Plosila, J. Swarms of Unmanned Aerial Vehicles—A Survey. J. Ind. Inf. Integr. 2019, 16, 100106. [Google Scholar] [CrossRef]
- Bithas, P.S.; Michailidis, E.T.; Nomikos, N.; Vouyioukas, D.; Kanatas, A.G. A Survey on Machine-Learning Techniques for UAV-Based Communications. Sensors 2019, 19, 5170. [Google Scholar] [CrossRef]
- Schranz, M.; Umlauft, M.; Sende, M.; Elmenreich, W. Swarm Robotic Behaviors and Current Applications. Front. Robot. AI 2020, 7, 36. [Google Scholar] [CrossRef]
- Nawaz, H.; Ali, H.M.; Laghari, A.A. UAV Communication Networks Issues: A Review. Arch. Comput. Methods Eng. 2021, 28, 1349–1369. [Google Scholar] [CrossRef]
- Sun, W.; Tang, M.; Zhang, L.; Huo, Z.; Shu, L. A Survey of Using Swarm Intelligence Algorithms in IoT. Sensors 2020, 20, 1420. [Google Scholar] [CrossRef]
- Zhou, Y.; Rao, B.; Wang, W. UAV Swarm Intelligence: Recent Advances and Future Trends. IEEE Access 2020, 8, 183856–183878. [Google Scholar] [CrossRef]
- Sharma, A.; Shoval, S.; Sharma, A.; Pandey, J.K. Path Planning for Multiple Targets Interception by the Swarm of UAVs based on Swarm Intelligence Algorithms: A Review. IETE Tech. Rev. 2022, 39, 675–697. [Google Scholar] [CrossRef]
- Peng, Q.; Wu, H.; Xue, R. Review of Dynamic Task Allocation Methods for UAV Swarms Oriented to Ground Targets. Complex Syst. Model. Simul. 2021, 1, 163–175. [Google Scholar] [CrossRef]
- Rovira-Sugranes, A.; Razi, A.; Afghah, F.; Chakareski, J. A review of AI-enabled routing protocols for UAV networks: Trends, challenges, and future outlook. Ad Hoc Netw. 2022, 130, 102790. [Google Scholar] [CrossRef]
- Mohsan, S.A.H.; Khan, M.A.; Noor, F.; Ullah, I.; Alsharif, M.H. Towards the Unmanned Aerial Vehicles (UAVs): A Comprehensive Review. Drones 2022, 6, 147. [Google Scholar] [CrossRef]
- Campion, M.; Ranganathan, P.; Faruque, S. UAV swarm communication and control architectures: A review. J. Unmanned Veh. Syst. 2019, 7, 93–106. [Google Scholar] [CrossRef]
- Puente-Castro, A.; Rivero, D.; Pazos, A.; Fernandez-Blanco, E. A review of artificial intelligence applied to path planning in UAV swarms. Neural Comput. Appl. 2022, 34, 153–170. [Google Scholar] [CrossRef]
- Tang, J.; Duan, H.; Lao, S. Swarm intelligence algorithms for multiple unmanned aerial vehicles collaboration: A comprehensive review. Artif. Intell. Rev. 2022. [Google Scholar] [CrossRef]
- Suo, W.; Wang, M.; Zhang, D.; Qu, Z.; Yu, L. Formation Control Technology of Fixed-Wing UAV Swarm Based on Distributed Ad Hoc Network. Appl. Sci. 2022, 12, 535. [Google Scholar] [CrossRef]
- Celtek, S.A.; Durdu, A.; Kurnaz, E. Design and Simulation of the Hierarchical Tree Topology Based Wireless Drone Networks. In Proceedings of the 2018 International Conference on Artificial Intelligence and Data Processing (IDAP), Malatya, Turkey, 28–30 September 2018; IEEE: New York, NY, USA, 2018; pp. 1–5. [Google Scholar]
- Zhu, Q.; Zhou, R.; Zhang, J. Connectivity Maintenance Based on Multiple Relay UAVs Selection Scheme in Cooperative Surveillance. Appl. Sci. 2016, 7, 8. [Google Scholar] [CrossRef]
- Sahingoz, O.K. Mobile networking with UAVs: Opportunities and challenges. In Proceedings of the 2013 International Conference on Unmanned Aircraft Systems (ICUAS), Atlanta, GA, USA, 28–31 May 2013; IEEE: New York, NY, USA, 2013; pp. 933–941. [Google Scholar]
- Zhang, K.; Zhang, W.; Zeng, J.-Z. Preliminary Study of Routing and Date Integrity in Mobile Ad Hoc UAV Network. In Proceedings of the 2008 International Conference on Apperceiving Computing and Intelligence Analysis, Chengdu, China, 13–15 December 2008; IEEE: New York, NY, USA, 2008; pp. 347–350. [Google Scholar]
- Secinti, G.; Darian, P.B.; Canberk, B.; Chowdhury, K.R. Resilient end-to-end connectivity for software defined unmanned aerial vehicular networks. In Proceedings of the 2017 IEEE 28th Annual International Symposium on Personal, Indoor, and Mobile Radio Communications (PIMRC), Montreal, QC, Canada, 8–13 October 2017; IEEE: New York, NY, USA, 2017; pp. 1–5. [Google Scholar]
- Peng, J.; Gao, H.; Liu, L.; Li, N.; Xu, X. TBM: An Efficient Trajectory-Based Multicast Routing Protocol for Sparse UAV networks. In Proceedings of the 2020 IEEE 22nd International Conference on High Performance Computing and Communications; IEEE 18th International Conference on Smart City; IEEE 6th International Conference on Data Science and Systems (HPCC/SmartCity/DSS), Yanuca Island, Cuvu, Fiji, 14–16 December 2020; IEEE: New York, NY, USA, 2020; pp. 867–872. [Google Scholar]
- Rosalie, M.; Brust, M.R.; Danoy, G.; Chaumette, S.; Bouvry, P. Coverage Optimization with Connectivity Preservation for UAV Swarms Applying Chaotic Dynamics. In Proceedings of the 2017 IEEE International Conference on Autonomic Computing (ICAC), Columbus, OH, USA, 17–21 July 2017; IEEE: New York, NY, USA, 2017; pp. 113–118. [Google Scholar]
- Yanmaz, E. Connectivity versus area coverage in unmanned aerial vehicle networks. In Proceedings of the 2012 IEEE International Conference on Communications (ICC), Ottawa, ON, Canada, 10–15 June 2012; IEEE: New York, NY, USA, 2012; pp. 719–723. [Google Scholar]
- Kaur, M.; Prashar, D.; Rashid, M.; Alshamrani, S.S.; AlGhamdi, A.S. A Novel Approach for Securing Nodes Using Two-Ray Model and Shadow Effects in Flying Ad-Hoc Network. Electronics 2021, 10, 3164. [Google Scholar] [CrossRef]
- Park, S.; Kim, H.T.; Kim, H. Energy-Efficient Topology Control for UAV Networks. Energies 2019, 12, 4523. [Google Scholar] [CrossRef]
- Aznar, F.; Pujol, M.; Rizo, R.; Pujol, F.; Rizo, C. Energy-Efficient Swarm Behavior for Indoor UAV Ad-Hoc Network Deployment. Symmetry 2018, 10, 632. [Google Scholar] [CrossRef]
- Stirling, T.; Floreano, D. Energy-Time Efficiency in Aerial Swarm Deployment. In Distributed Autonomous Robotic Systems: The 10th International Symposium, Proceedings of the 10th International Symposium on Distributed Autonomous Robotic Systems (DARS 2010), Lausanne, Switzerland, 1–3 November 2010; Martinoli, A., Mondada, F., Correll, N., Mermoud, G., Egerstedt, M., Hsieh, M.A., Parker, L.E., Støy, K., Eds.; Springer: Berlin/Heidelberg, Germany, 2013; pp. 5–18. [Google Scholar]
- Hu, N.; Tian, Z.; Sun, Y.; Yin, L.; Zhao, B.; Du, X.; Guizani, N. Building Agile and Resilient UAV Networks Based on SDN and Blockchain. IEEE Netw. 2021, 35, 57–63. [Google Scholar] [CrossRef]
- Horvath, D.; Gazda, J.; Slapak, E.; Maksymyuk, T. Modeling and Analysis of Self-Organizing UAV-Assisted Mobile Networks with Dynamic On-Demand Deployment. Entropy 2019, 21, 1077. [Google Scholar] [CrossRef]
- Phadke, A.; Medrano, F.A.; Ustymenko, S. A Review of Vehicular Micro-Clouds. In Proceedings of the 2021 International Conference on Computational Science and Computational Intelligence (CSCI), Las Vegas, NV, USA, 15–17 December 2021; IEEE: New York, NY, USA, 2021; pp. 411–417. [Google Scholar]
- Hydher, H.; Jayakody, D.N.K.; Hemachandra, K.T.; Samarasinghe, T. Intelligent UAV Deployment for a Disaster-Resilient Wireless Network. Sensors 2020, 20, 6140. [Google Scholar] [CrossRef]
- Pu, C. Jamming-Resilient Multipath Routing Protocol for Flying Ad Hoc Networks. IEEE Access 2018, 6, 68472–68486. [Google Scholar] [CrossRef]
- Park, M.; Lee, S.; Lee, S. Dynamic Topology Reconstruction Protocol for UAV Swarm Networking. Symmetry 2020, 12, 1111. [Google Scholar] [CrossRef]
- Chen, R.; Xu, N.; Li, J. A Self-Organized Reciprocal Decision Approach for Sensing Coverage with Multi-UAV Swarms. Sensors 2018, 18, 1864. [Google Scholar] [CrossRef]
- Elmokadem, T.; Savkin, A.V. Computationally-Efficient Distributed Algorithms of Navigation of Teams of Autonomous UAVs for 3D Coverage and Flocking. Drones 2021, 5, 124. [Google Scholar] [CrossRef]
- Reynolds, C.W. Flocks, Herds and Schools: A Distributed Behavioral Model. SIGGRAPH Comput. Graph. 1987, 21, 25–34. [Google Scholar] [CrossRef]
- Acar, E.U.; Choset, H.; Rizzi, A.A.; Atkar, P.N.; Hull, D. Morse Decompositions for Coverage Tasks. Int. J. Robot. Res. 2002, 21, 331–344. [Google Scholar] [CrossRef]
- Choset, H.; Pignon, P. Coverage Path Planning: The Boustrophedon Cellular Decomposition. In Field and Service Robotics; Zelinsky, A., Ed.; Springer: London, UK, 1998; pp. 203–209. [Google Scholar]
- Huang, W.H. Optimal line-sweep-based decompositions for coverage algorithms. In Proceedings of the 2001 ICRA, IEEE International Conference on Robotics and Automation (Cat. No.01CH37164), Seoul, Korea, 21–26 May 2001; IEEE: New York, NY, USA, 2001; Volume 21, pp. 27–32. [Google Scholar]
- Gonzalez, E.; Alvarez, O.; Diaz, Y.; Parra, C.; Bustacara, C. BSA: A Complete Coverage Algorithm. In Proceedings of the 2005 IEEE International Conference on Robotics and Automation, Barcelona, Spain, 18–22 April 2005; IEEE: New York, NY, USA, 2005; pp. 2040–2044. [Google Scholar]
- Sun, Y.; Tan, Q.; Yan, C.; Chang, Y.; Xiang, X.; Zhou, H. Multi-UAV Coverage through Two-Step Auction in Dynamic Environments. Drones 2022, 6, 153. [Google Scholar] [CrossRef]
- Ahmed, N.; Pawase, C.J.; Chang, K. Distributed 3-D Path Planning for Multi-UAVs with Full Area Surveillance Based on Particle Swarm Optimization. Appl. Sci. 2021, 11, 3417. [Google Scholar] [CrossRef]
- Shi, K.; Zhang, X.; Xia, S. Multiple Swarm Fruit Fly Optimization Algorithm Based Path Planning Method for Multi-UAVs. Appl. Sci. 2020, 10, 2822. [Google Scholar] [CrossRef]
- Liu, H.; Ge, J.; Wang, Y.; Li, J.; Ding, K.; Zhang, Z.; Guo, Z.; Li, W.; Lan, J. Multi-UAV Optimal Mission Assignment and Path Planning for Disaster Rescue Using Adaptive Genetic Algorithm and Improved Artificial Bee Colony Method. Actuators 2021, 11, 4. [Google Scholar] [CrossRef]
- Liu, X.; Yan, C.; Zhou, H.; Chang, Y.; Xiang, X.; Tang, D. Towards Flocking Navigation and Obstacle Avoidance for Multi-UAV Systems through Hierarchical Weighting Vicsek Model. Aerospace 2021, 8, 286. [Google Scholar] [CrossRef]
- Yu, T.; Tang, J.; Bai, L.; Lao, S. Collision Avoidance for Cooperative UAVs with Rolling Optimization Algorithm Based on Predictive State Space. Appl. Sci. 2017, 7, 329. [Google Scholar] [CrossRef]
- Fabra, F.; Calafate, C.T.; Cano, J.C.; Manzoni, P. A collision avoidance solution for UAVs following planned missions. In Proceedings of the 2018 IEEE Wireless Communications and Networking Conference Workshops (WCNCW), Barcelona, Spain, 15–18 April 2018; IEEE: New York, NY, USA, 2018; pp. 55–60. [Google Scholar]
- Lao, M.; Tang, J. Sense selection strategy of collision avoidance for cooperative UAVs sharing airspace. In Proceedings of the 2016 IEEE Information Technology, Networking, Electronic and Automation Control Conference (ITNEC), Chongqing, China, 20–22 May 2016; IEEE: New York, NY, USA, 2016; pp. 11–15. [Google Scholar]
- Chou, F.-Y.; Yang, C.-Y.; Yang, J.-S. Support vector machine based artificial potential field for autonomous guided vehicle. In Proceedings of the SPIE, Fourth International Symposium on Precision Mechanical Measurements, Hefei, Anhui, China, 25–29 August 2008; SPIE-International Society for Optical Engineering: Bellingham, WA, USA, 2008; p. 71304J. [Google Scholar]
- Masoud, A.A. Managing the Dynamics of a Harmonic Potential Field-Guided Robot in a Cluttered Environment. IEEE Trans. Ind. Electron. 2009, 56, 488–496. [Google Scholar] [CrossRef]
- Huang, H.; Zhou, H.; Zheng, M.; Xu, C.; Zhang, X.; Xiong, W. Cooperative Collision Avoidance Method for Multi-UAV Based on Kalman Filter and Model Predictive Control. In Proceedings of the 2019 International Conference on Unmanned Systems and Artificial Intelligence (ICUSAI), Xi’an, China, 22–24 November 2019; IEEE: New York, NY, USA, 2019; pp. 1–7. [Google Scholar]
- Nordlund, P.-J.; Gustafsson, F. Probabilistic Conflict Detection for Piecewise Straight Paths; Linköping University Electronic Press: Linköping, Sweden, 2008. [Google Scholar]
- Li, D.; Cui, D. Air traffic control conflict detection algorithm based on Brownian motion. J. Tsinghua Univ. 2008, 48, 477. [Google Scholar]
- Gan, X.; Wu, Y.; Liu, P.; Wang, Q. Dynamic Collision Avoidance Zone Modeling Method Based on UAV Emergency Collision Avoidance Trajectory. In Proceedings of the 2020 IEEE International Conference on Artificial Intelligence and Information Systems (ICAIIS), Dalian, China, 20–22 March 2020; IEEE: New York, NY, USA, 2020; pp. 693–696. [Google Scholar]
- De Sá, A.O.; Nedjah, N.; Mourelle, L.d.M. Distributed and resilient localization algorithm for Swarm Robotic Systems. Appl. Soft Comput. 2017, 57, 738–750. [Google Scholar] [CrossRef]
- De Haag, M.U.; Huschbeck, S.; Huff, J. sUAS Swarm Navigation using Inertial, Range Radios and Partial GNSS. In Proceedings of the 2019 IEEE/AIAA 38th Digital Avionics Systems Conference (DASC), San Diego, CA, USA, 8–12 September 2019; IEEE: New York, NY, USA, 2019; pp. 1–10. [Google Scholar]
- Nallanthighal, R.S.; Chinta, V. Improved Grid-Scan Localization Algorithm for Wireless Sensor Networks. J. Eng. 2014, 2014, 628161. [Google Scholar] [CrossRef]
- Bulusu, N.; Heidemann, J.; Estrin, D. GPS-less low-cost outdoor localization for very small devices. IEEE Pers. Commun. 2000, 7, 28–34. [Google Scholar] [CrossRef]
- Li, N.; Becerik-Gerber, B.; Krishnamachari, B.; Soibelman, L. A BIM centered indoor localization algorithm to support building fire emergency response operations. Autom. Constr. 2014, 42, 78–89. [Google Scholar] [CrossRef]
- Yun, S.; Lee, J.; Chung, W.; Kim, E.; Kim, S. A soft computing approach to localization in wireless sensor networks. Expert Syst. Appl. 2009, 36, 7552–7561. [Google Scholar] [CrossRef]
- Kim, S.-Y.; Kwon, O.-H. Location estimation based on edge weights in wireless sensor networks. J. Korean Inst. Commun. Inf. Sci. 2005, 30, 938–948. [Google Scholar]
- Son, J.; Kim, S.; Sohn, K. A multi-vision sensor-based fast localization system with image matching for challenging outdoor environments. Expert Syst. Appl. 2015, 42, 8830–8839. [Google Scholar] [CrossRef]
- DJI. DJI Tello Drone Shop. Available online: https://m.dji.com/product/tello-edu?from=shop (accessed on 18 October 2022).
- Rampinelli, M.; Covre, V.B.; De Queiroz, F.M.; Vassallo, R.F.; Bastos-Filho, T.F.; Mazo, M. An Intelligent Space for Mobile Robot Localization Using a Multi-Camera System. Sensors 2014, 14, 15039–15064. [Google Scholar] [CrossRef]
- Causa, F.; Fasano, G.; Grassi, M. GNSS-aware Path Planning for UAV swarm in complex environments. In Proceedings of the 2019 IEEE 5th International Workshop on Metrology for AeroSpace (MetroAeroSpace), Turin, Italy, 19–21 June 2019; IEEE: New York, NY, USA, 2019; pp. 661–666. [Google Scholar]
- Rabaey, C.S.J.; Langendoen, K. Robust positioning algorithms for distributed ad-hoc wireless sensor networks. In Proceedings of the USENIX Technical Annual Conference, Monterey, CA, USA, 10–15 June 2002; pp. 317–327. [Google Scholar]
- De Sá, A.O.; Nedjah, N.; de Macedo Mourelle, L. Distributed efficient localization in swarm robotic systems using swarm intelligence algorithms. Neurocomputing 2016, 172, 322–336. [Google Scholar] [CrossRef]
- Rashid, A.T.; Frasca, M.; Ali, A.A.; Rizzo, A.; Fortuna, L. Multi-robot localization and orientation estimation using robotic cluster matching algorithm. Robot. Auton. Syst. 2015, 63, 108–121. [Google Scholar] [CrossRef]
- Choi, S.-C.; Hussen, H.R.; Park, J.-H.; Kim, J. Geolocation-Based Routing Protocol for Flying Ad Hoc Networks (FANETs). In Proceedings of the 2018 Tenth International Conference on Ubiquitous and Future Networks (ICUFN), Prague, Czech Republic, 3–6 July 2018; IEEE: New York, NY, USA, 2018; pp. 50–52. [Google Scholar]
- Vicsek, T.; Zafeiris, A. Collective motion. Collect. Motion 2012, 517, 71–140. [Google Scholar] [CrossRef]
- Zhu, C.; Liang, X.; He, L.; Liu, L. Demonstration and verification system for UAV formation control. In Proceedings of the 2017 3rd IEEE International Conference on Control Science and Systems Engineering (ICCSSE), Beijing, China, 17–19 August 2017; IEEE: New York, NY, USA, 2017; pp. 56–60. [Google Scholar]
- Brust, M.R.; Danoy, G.; Bouvry, P.; Gashi, D.; Pathak, H.; Goncalves, M.P. Defending Against Intrusion of Malicious UAVs with Networked UAV Defense Swarms. In Proceedings of the 2017 IEEE 42nd Conference on Local Computer Networks: Workshops (LCN Workshops), Singapore, 9 October 2017; IEEE: New York, NY, USA, 2017; pp. 103–111. [Google Scholar]
- Azam, M.A.; Mittelmann, H.D.; Ragi, S. UAV Formation Shape Control via Decentralized Markov Decision Processes. Algorithms 2021, 14, 91. [Google Scholar] [CrossRef]
- Xie, Y.; Han, L.; Dong, X.; Li, Q.; Ren, Z. Bio-inspired adaptive formation tracking control for swarm systems with application to UAV swarm systems. Neurocomputing 2021, 453, 272–285. [Google Scholar] [CrossRef]
- Madden, J.D.; Arkin, R.C.; MacNulty, D.R. Multi-robot system based on model of wolf hunting behavior to emulate wolf and elk interactions. In Proceedings of the 2010 IEEE International Conference on Robotics and Biomimetics, Tianjin, China, 14–18 December 2010; IEEE: New York, NY, USA, 2010; pp. 1043–1050. [Google Scholar]
- Zhang, S.; Zhou, Y.; Li, Z.; Pan, W. Grey wolf optimizer for unmanned combat aerial vehicle path planning. Adv. Eng. Softw. 2016, 99, 121–136. [Google Scholar] [CrossRef]
- Dewangan, R.K.; Shukla, A.; Godfrey, W.W. Three dimensional path planning using Grey wolf optimizer for UAVs. Appl. Intell. 2019, 49, 2201–2217. [Google Scholar] [CrossRef]
- Duan, H.; Yang, Q.; Deng, Y.; Li, P.; Qiu, H.; Zhang, T.; Zhang, D.; Huo, M.; Shen, Y. Unmanned aerial systems coordinate target allocation based on wolf behaviors. Sci. China Inf. Sci. 2018, 62, 14201. [Google Scholar] [CrossRef]
- Yao, P.; Wang, H.; Ji, H. Multi-UAVs tracking target in urban environment by model predictive control and Improved Grey Wolf Optimizer. Aerosp. Sci. Technol. 2016, 55, 131–143. [Google Scholar] [CrossRef]
- Fabra, F.; Zamora, W.; Reyes, P.; Calafate, C.T.; Cano, J.-C.; Manzoni, P.; Hernandez-Orallo, E. An UAV Swarm Coordination Protocol Supporting Planned Missions. In Proceedings of the 2019 28th International Conference on Computer Communication and Networks (ICCCN), Valencia, Spain, 29 July–1 August 2019; IEEE: New York, NY, USA, 2019; pp. 1–9. [Google Scholar]
- Opromolla, R.; Inchingolo, G.; Fasano, G. Airborne Visual Detection and Tracking of Cooperative UAVs Exploiting Deep Learning. Sensors 2019, 19, 4332. [Google Scholar] [CrossRef]
- Bertuccelli, L.F.; How, J.P. Robust UAV search for environments with imprecise probability maps. In Proceedings of the 44th IEEE Conference on Decision and Control, Seville, Spain, 15 December 2005; IEEE: New York, NY, USA, 2005; pp. 5680–5685. [Google Scholar]
- Yang, Y.; Minai, A.A.; Polycarpou, M.M. Decentralized cooperative search by networked UAVs in an uncertain environment. In Proceedings of the 2004 American Control Conference, Boston, MA, USA, 30 June–2 July 2004; IEEE: New York, NY, USA, 2004; pp. 5558–5563. [Google Scholar]
- Hu, J.; Xie, L.; Xu, J.; Xu, Z. Multi-Agent Cooperative Target Search. Sensors 2014, 14, 9408–9428. [Google Scholar] [CrossRef]
- Duan, H.; Qiao, P. Pigeon-inspired optimization: A new swarm intelligence optimizer for air robot path planning. Int. J. Intell. Comput. Cybern. 2014, 7, 24–37. [Google Scholar] [CrossRef]
- Li, L.; Xu, S.; Nie, H.; Mao, Y.; Yu, S. Collaborative Target Search Algorithm for UAV Based on Chaotic Disturbance Pigeon-Inspired Optimization. Appl. Sci. 2021, 11, 7358. [Google Scholar] [CrossRef]
- Li, X.; Chen, J.; Deng, F.; Li, H. Profit-Driven Adaptive Moving Targets Search with UAV Swarms. Sensors 2019, 19, 1545. [Google Scholar] [CrossRef] [PubMed]
- Apple. Lose Your Knack for Losing Things. Available online: https://www.apple.com/airtag/?afid=p238%7Csk3e2cSut-dc_mtid_1870765e38482_pcrid_569595868773_pgrid_125218674714_pntwk_g_pchan__pexid__&cid=aos-us-kwgo-btb--slid---product- (accessed on 18 October 2022).
- Mendonca, R.; Marques, M.M.; Marques, F.; Lourenco, A.; Pinto, E.; Santana, P.; Coito, F.; Lobo, V.; Barata, J. A cooperative multi-robot team for the surveillance of shipwreck survivors at sea. In Proceedings of the OCEANS 2016 MTS/IEEE Monterey, Monterey, CA, USA, 19–23 September 2016; IEEE: New York, NY, USA, 2016; pp. 1–6. [Google Scholar]
- Brust, M.R.; Danoy, G.; Stolfi, D.H.; Bouvry, P. Swarm-based counter UAV defense system. Discov. Internet Things 2021, 1, 2. [Google Scholar] [CrossRef]
- Kerns, A.J.; Shepard, D.P.; Bhatti, J.A.; Humphreys, T.E. Unmanned Aircraft Capture and Control Via GPS Spoofing: Unmanned Aircraft Capture and Control. J. Field Robot. 2014, 31, 617–636. [Google Scholar] [CrossRef]
- Shepard, D.P.; Bhatti, J.A.; Humphreys, T.E.; Fansler, A.A. Evaluation of smart grid and civilian UAV vulnerability to GPS spoofing attacks. In Proceedings of the 25th International Technical Meeting of The Satellite Division of the Institute of Navigation (ION GNSS 2012), Nashville, TN, USA, 17–21 September 2012; pp. 3591–3605. [Google Scholar]
- Akhloufi, M.A.; Arola, S.; Bonnet, A. Drones Chasing Drones: Reinforcement Learning and Deep Search Area Proposal. Drones 2019, 3, 58. [Google Scholar] [CrossRef]
- Choudhary, G.; Sharma, V.; You, I.; Yim, K.; Chen, I.-R.; Cho, J.-H. Intrusion Detection Systems for Networked Unmanned Aerial Vehicles: A Survey. In Proceedings of the 2018 14th International Wireless Communications & Mobile Computing Conference (IWCMC), Limassol, Cyprus, 25–29 June 2018; pp. 560–565. [Google Scholar]
- Sharma, M.; Saini, S.; Bahl, S.; Goyal, R.; Deswal, S. Modified Bio-Inspired Algorithms for Intrusion Detection System. In Proceedings of the International Conference on Innovative Computing and Communications, Delhi, India, 20–21 February 2021; Gupta, D., Khanna, A., Bhattacharyya, S., Hassanien, A.E., Anand, S., Jaiswal, A., Eds.; Springer: Singapore, 2021; pp. 185–201. [Google Scholar]
- Phadke, A.; Ustymenko, S. Updating the Taxonomy of Intrusion Detection Systems. In Proceedings of the 2021 IEEE 45th Annual Computers, Software, and Applications Conference (COMPSAC), Madrid, Spain, 12–16 July 2021; pp. 1085–1091. [Google Scholar]
- Kumari, A.; Gupta, R.; Tanwar, S.; Kumar, N. A taxonomy of blockchain-enabled softwarization for secure UAV network. Comput. Commun. 2020, 161, 304–323. [Google Scholar] [CrossRef]
- Tan, X.; Su, S.; Zuo, Z.; Guo, X.; Sun, X. Intrusion Detection of UAVs Based on the Deep Belief Network Optimized by PSO. Sensors 2019, 19, 5529. [Google Scholar] [CrossRef]
- Li, L.; Zhang, H.; Peng, H.; Yang, Y. Nearest neighbors based density peaks approach to intrusion detection. Chaos Solitons Fractals 2018, 110, 33–40. [Google Scholar] [CrossRef]
- Sedjelmaci, H.; Senouci, S.M.; Ansari, N. A Hierarchical Detection and Response System to Enhance Security Against Lethal Cyber-Attacks in UAV Networks. IEEE Trans. Syst. Man Cybern. Syst. 2018, 48, 1594–1606. [Google Scholar] [CrossRef]
- Phadke, A.; Medrano, F.A.; Ustymenko, S. Applications of Blockchain in E-government. In Proceedings of the 2022 International Symposium on Electrical, Electronics and Information Engineering (ISEEIE), Chiang Mai, Thailand, 25–27 February 2022; pp. 157–164. [Google Scholar] [CrossRef]
- Jensen, I.J.; Selvaraj, D.F.; Ranganathan, P. Blockchain Technology for Networked Swarms of Unmanned Aerial Vehicles (UAVs). In Proceedings of the 2019 IEEE 20th International Symposium on “A World of Wireless, Mobile and Multimedia Networks” (WoWMoM), Washington, DC, USA, 10–12 June 2019; pp. 1–7. [Google Scholar]
- Bhatia, J.; Dave, R.; Bhayani, H.; Tanwar, S.; Nayyar, A. SDN-based real-time urban traffic analysis in VANET environment. Comput. Commun. 2020, 149, 162–175. [Google Scholar] [CrossRef]
- Singh, M.; Singh, A.; Kim, S. Blockchain: A game changer for securing IoT data. In Proceedings of the 2018 IEEE 4th World Forum on Internet of Things (WF-IoT), Singapore, 5–8 February 2018; pp. 51–55. [Google Scholar] [CrossRef]
- Liang, X.; Zhao, J.; Shetty, S.; Li, D. Towards data assurance and resilience in IoT using blockchain. In Proceedings of the MILCOM 2017—2017 IEEE Military Communications Conference (MILCOM), Baltimore, MD, USA, 23–25 October 2017; pp. 261–266. [Google Scholar] [CrossRef]
- Alladi, T.; Chamola, V.; Sahu, N.; Guizani, M. Applications of blockchain in unmanned aerial vehicles: A review. Veh. Commun. 2020, 23, 100249. [Google Scholar] [CrossRef]
- Lu, Y.; Ma, Y.; Wang, J.; Han, L. Task Assignment of UAV Swarm Based on Wolf Pack Algorithm. Appl. Sci. 2020, 10, 8335. [Google Scholar] [CrossRef]
- Lu, Y.; Ma, Y.; Wang, J. Multi-Population Parallel Wolf Pack Algorithm for Task Assignment of UAV Swarm. Appl. Sci. 2021, 11, 11996. [Google Scholar] [CrossRef]
- Novoa-Hernández, P.; Corona, C.C.; Pelta, D.A. A software tool for assisting experimentation in dynamic environments. Appl. Comp. Intell. Soft Comput. 2015, 2015, 302172. [Google Scholar] [CrossRef]
- Wu, H.; Li, H.; Xiao, R.; Liu, J. Modeling and simulation of dynamic ant colony’s labor division for task allocation of UAV swarm. Phys. A Stat. Mech. Its Appl. 2018, 491, 127–141. [Google Scholar] [CrossRef]
- Jiang, X.; Zhou, Q.; Ye, Y. Method of Task Assignment for UAV Based on Particle Swarm Optimization in logistics. In Proceedings of the 2017 International Conference on Intelligent Systems, Metaheuristics & Swarm Intelligence, Hong Kong, China, 25–27 March; 2017; pp. 113–117. [Google Scholar]
- Alwateer, M.; Loke, S.W. A Two-Layered Task Servicing Model for Drone Services: Overview and Preliminary Results. In Proceedings of the 2019 IEEE International Conference on Pervasive Computing and Communications Workshops (PerCom Workshops), Kyoto, Japan, 11–15 March 2019; pp. 387–390. [Google Scholar]
- Wang, M.; Chen, P.; Cao, Z.; Chen, Y. Reinforcement Learning-Based UAVs Resource Allocation for Integrated Sensing and Communication (ISAC) System. Electronics 2022, 11, 441. [Google Scholar] [CrossRef]
- Chen, S.; Shi, L.; Ding, X.; Lv, Z.; Li, Z. Energy Efficient Resource Allocation and Trajectory Optimization in UAV-Assisted Mobile Edge Computing System. In Proceedings of the 2021 7th International Conference on Big Data Computing and Communications (BigCom), Deqing, China, 13–15 August 2021; pp. 7–13. [Google Scholar] [CrossRef]
- Scheutz, M.; Schermerhorn, P.; Bauer, P. The utility of heterogeneous swarms of simple UAVs with limited sensory capacity in detection and tracking tasks. In Proceedings of the 2005 IEEE Swarm Intelligence Symposium, 2005. SIS 2005, Pasadena, CA, USA, 8–10 June 2005; pp. 257–264. [Google Scholar] [CrossRef]
- Kwa, H.L.; Tokić, G.; Bouffanais, R.; Yue, D.K.P. Heterogeneous Swarms for Maritime Dynamic Target Search and Tracking. In Proceedings of the Global Oceans 2020: Singapore—U.S. Gulf Coast, IEEE/MTS OCEANS 2020, Singapore, 5–30 October 2020; pp. 1–8. [Google Scholar]
- Gade, S.; Joshi, A. Heterogeneous UAV swarm system for target search in adversarial environment. In Proceedings of the 2013 International Conference on Control Communication and Computing (ICCC), Thiruvananthapuram, India, 13–15 December 2013; pp. 358–363. [Google Scholar]
- Ramana Makkapati, V.; Tsiotras, P. Apollonius Allocation Algorithm for Heterogeneous Pursuers to Capture Multiple Evaders. arXiv 2020, arXiv:2006.10253. [Google Scholar]
- Xu, C.; Zhang, K.; Jiang, Y.; Niu, S.; Yang, T.; Song, H. Communication Aware UAV Swarm Surveillance Based on Hierarchical Architecture. Drones 2021, 5, 33. [Google Scholar] [CrossRef]
- Dewan, A.; Mahendran, A.; Soni, N.; Krishna, M. Optimization Based coordinated uGV-MAV exploration for 2D augmented mapping. In Proceedings of the 2013 International Conference on Autonomous Agents and Multi-Agent Systems, St. Paul, MN USA, 6–10 May 2013; pp. 1125–1126. [Google Scholar]
- Wanasinghe, T.R.; Mann, G.K.I.; Gosine, R.G. Distributed Leader-Assistive Localization Method for a Heterogeneous Multirobotic System. IEEE Trans. Autom. Sci. Eng. 2015, 12, 795–809. [Google Scholar] [CrossRef]
- Wang, J.; Jia, G.; Lin, J.; Hou, Z. Cooperative Mission Planning for Heterogeneous UAVs with the Improved Multi-objective Quantum-behaved Particle Swarm Optimization Algorithm. In Proceedings of the 2019 Chinese Control and Decision Conference (CCDC), Nanchang, China, 3–5 June 2019; pp. 3740–3745. [Google Scholar]
- Zhang, H.; He, Y.; Li, D.; Gu, F.; Li, Q.; Zhang, M.; Di, C.; Chu, L.; Chen, B.; Hu, Y. Marine UAV–USV Marsupial Platform: System and Recovery Technic Verification. Appl. Sci. 2020, 10, 1583. [Google Scholar] [CrossRef]
- Gomes, J.; Mariano, P.; Christensen, A.L. Cooperative Coevolution of Partially Heterogeneous Multiagent Systems. 9. Available online: https://dl.acm.org/doi/abs/10.5555/2772879.2772919 (accessed on 8 October 2022).
- Kumar, P.S.; Emfinger, W.; Karsai, G. A testbed to simulate and analyze resilient cyber-physical systems. In Proceedings of the 2015 International Symposium on Rapid System Prototyping (RSP), Amsterdam, The Netherlands, 8–9 October 2015; pp. 97–103. [Google Scholar]
- Sun, Q.; Li, H.; Zhang, Y.; Xie, Y.; Liu, C. A Baseline Assessment Method of UAV Swarm Resilience Based on Complex Networks. In Proceedings of the 2021 IEEE 19th World Symposium on Applied Machine Intelligence and Informatics (SAMI), Herl’any, Slovakia, 21–23 January 2021; pp. 83–86. [Google Scholar]
- Tierney, K.; Bruneau, M. Conceptualizing and measuring resilience: A key to disaster loss reduction. TR News 2007, 17, 14–15. [Google Scholar]
- Leveson, N.G. System Safety Engineering: Back to The Future; Aeronautics and Astronautics Massachusetts Institute of Technology: Cambridge, MA, USA, 2002; Manuscript in preparation; Available online: http://sunnyday.mit.edu/book2.pdf (accessed on 18 October 2022).
- Nan, C.; Sansavini, G. A quantitative method for assessing resilience of interdependent infrastructures. Reliab. Eng. Syst. Saf. 2017, 157, 35–53. [Google Scholar] [CrossRef]
- Bai, G.; Li, Y.; Fang, Y.; Zhang, Y.-A.; Tao, J. Network approach for resilience evaluation of a UAV swarm by considering communication limits. Reliab. Eng. Syst. Saf. 2020, 193, 106602. [Google Scholar] [CrossRef]
- Jakaria, A.H.M.; Rahman, M.A. Formal Analysis of k-Resiliency for Collaborative UAVs. In Proceedings of the 2018 IEEE 42nd Annual Computer Software and Applications Conference (COMPSAC), Tokyo, Japan, 23–27 July 2018; pp. 583–592. [Google Scholar]
- Li, H.; Sun, Q.; Ren, K.; Xie, Y.; Liu, C.; Zhang, Y. Dynamic Resilience Assessment of UAV Swarm for Battlefield Surveillance Mission. In Proceedings of the 2021 IEEE International Conference on Unmanned Systems (ICUS), Beijing, China, 15–17 October 2021; pp. 472–477. [Google Scholar] [CrossRef]
- Medjo Me Biomo, J.-D.; Kunz, T.; St-Hilaire, M.; Zhou, Y. Unmanned Aerial ad Hoc Networks: Simulation-Based Evaluation of Entity Mobility Models’ Impact on Routing Performance. Aerospace 2015, 2, 392–422. [Google Scholar] [CrossRef]
- Khan, M.A.; Kumar, N.; Mohsan, S.A.H.; Khan, W.U.; Nasralla, M.M.; Alsharif, M.H.; Zywiolek, J.; Ullah, I. Swarm of UAVs for Network Management in 6G: A Technical Review. IEEE Trans. Netw. Serv. Manag. 2022. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Research Focus | Published |
|---|---|---|
| [27] | A review of linear and model-based nonlinear controllers for UAV swarms as well as general swarm characteristics | 2019 |
| [28] | A review of ML-based techniques to improve UAV-based communication modules such as resource management and security | 2019 |
| [23] | A survey of swarm communication architectures and routing protocols and their open research challenges | 2020 |
| [29] | A categorization of swarm behaviors into organization, navigation, decision, and miscellaneous modules | 2020 |
| [30] | Studying issues in UAV swarm communications: Power issues, routing protocols, and quality of service along with open research challenges | 2020 |
| [31] | A survey of application-specific scenarios in internet of things (IoT) by using swarm intelligence | 2020 |
| [32] | A survey of UAV swarm intelligence based on hierarchical frameworks | 2020 |
| [33] | A study of the path planning problem for interception of mobile targets using an UAV swarm | 2021 |
| [34] | Examining dynamic task allocation methods for UAV swarms | 2021 |
| [35] | AI-backed routing protocols used for UAV swarms with an emphasis on dynamic topology properties | 2022 |
| [36] | A broad discussion on UAV, with an overview of swarms, agent characteristics, and applications | 2022 |
| [37] | A discussion on high-level swarm autonomy and the use of cellular networks for swarm communication | 2022 |
| [38] | A review of four main AI-based path planning methods in UAV swarms | 2022 |
| [39] | A summary of swarm intelligence techniques for Multi UAV collaboration | 2022 |
| Parent Component | Module | Major Focus |
|---|---|---|
| 2.1 Communication | 2.1.1 Connectivity | Connectivity maintenance |
| 2.1.2 Network coverage | Efficient coverage of an area with strongly interconnected agents | |
| 2.1.3 Network structure | Types of network topologies | |
| 2.2 Movement | 2.2.1 Area coverage | Optimized area coverage by agents |
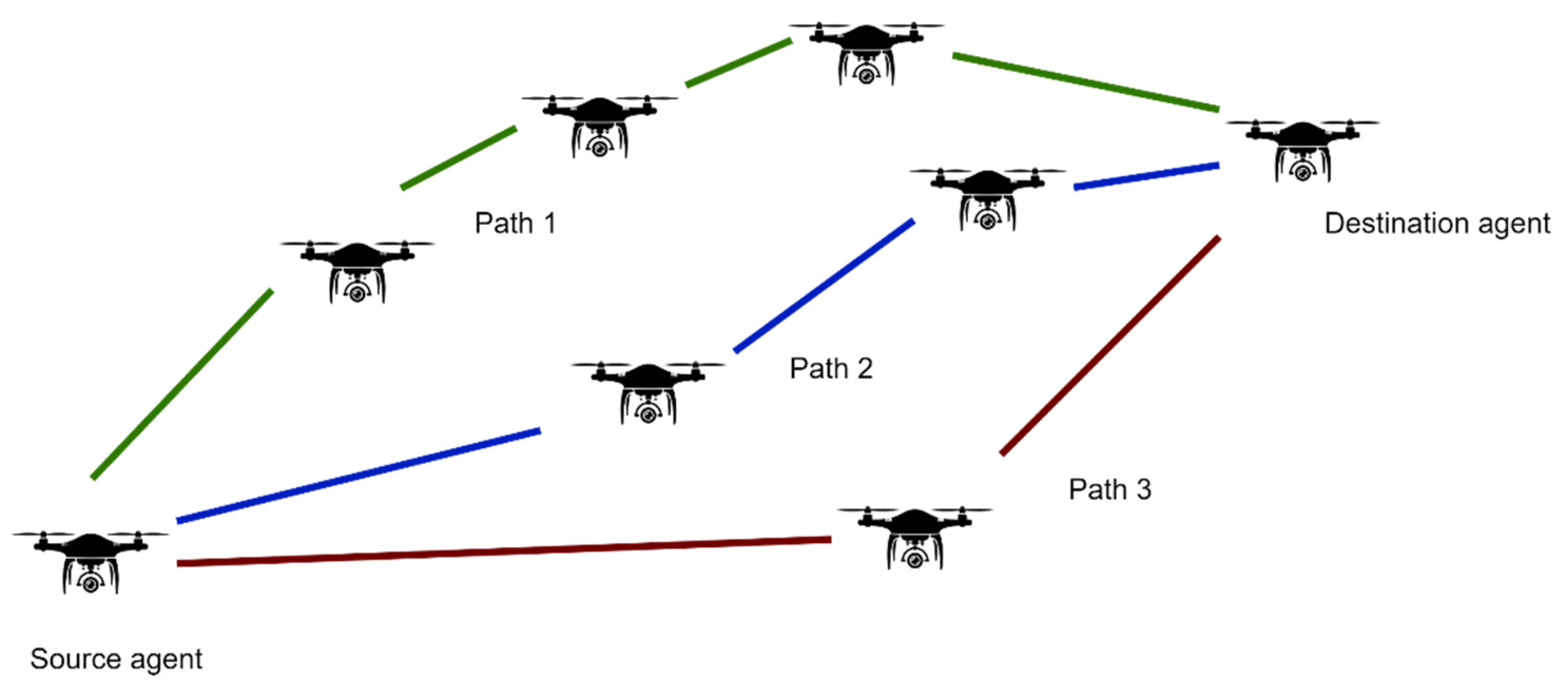
| 2.2.2 Path planning | Path planning protocols for agents | |
| 2.2.3 Obstacle avoidance | Protocols to avoid agent interaction with environmental obstacles | |
| 2.2.4 Collision avoidance | Protocols to avoid agent interactions with other agents in the same swarm | |
| 2.2.5 Navigation | Navigation and localization for agents | |
| 2.2.6 Flocking | Flocking dynamics for agent swarms | |
| 2.2.7 Formation control | Formation control for agent swarms | |
| 2.3 Search and Rescue (SAR) | 2.3.1 Search | Searching for lost swarm agents |
| 2.3.2 Rescue | Rescue and connectivity of located agents | |
| 2.4 Security | 2.4.1 Physical security | Ensuring physical security for swarm agents |
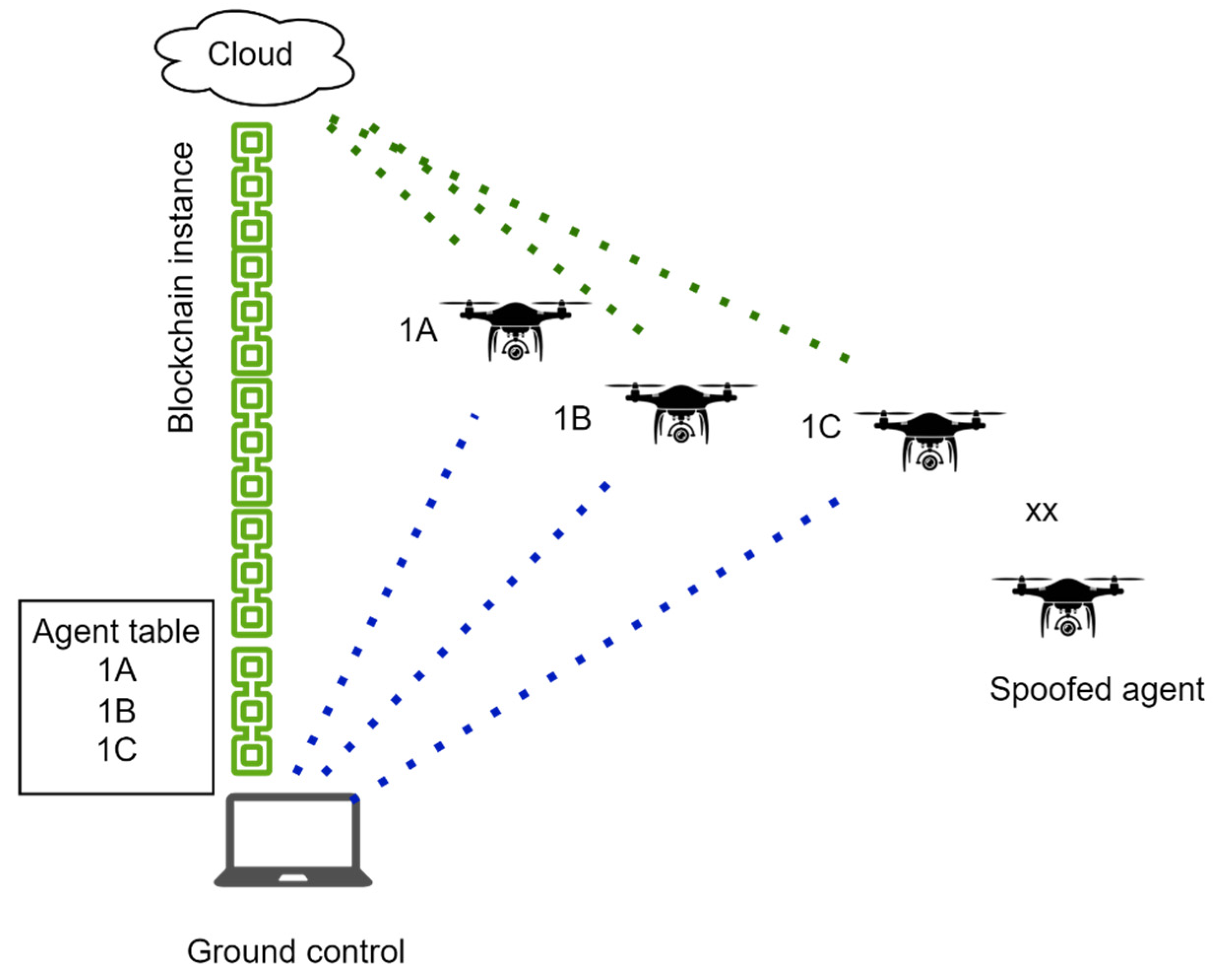
| 2.4.2 Network security | Network security and intrusion detection of swarm networks | |
| 2.5 Resource and task handling | 2.5.1 Task assignment | Task assignment protocols for agents in a swarm |
| 2.5.2 Resource allocation | Resource allocation and assignment policies for swarms | |
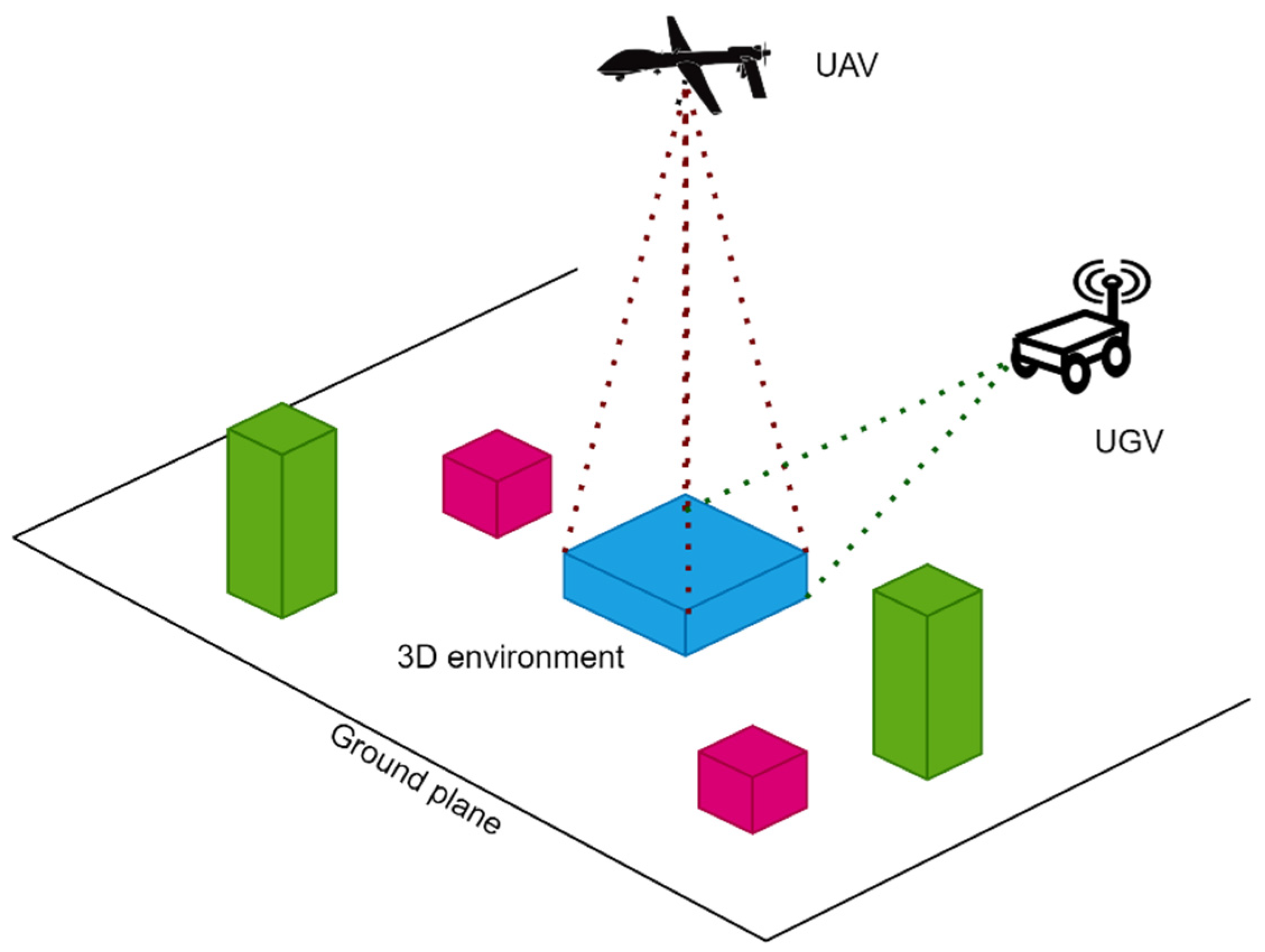
| 2.6 Agent property | 2.6 Heterogenous agents | The inclusion of heterogenous agents in swarms |
| 2.7 Resiliency evaluation | 2.7 Scalable and generalized metrics | Development of scalable and generalized metrics for evaluating swarm resilience |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Phadke, A.; Medrano, F.A. Towards Resilient UAV Swarms—A Breakdown of Resiliency Requirements in UAV Swarms. Drones 2022, 6, 340. https://doi.org/10.3390/drones6110340
Phadke A, Medrano FA. Towards Resilient UAV Swarms—A Breakdown of Resiliency Requirements in UAV Swarms. Drones. 2022; 6(11):340. https://doi.org/10.3390/drones6110340
Chicago/Turabian StylePhadke, Abhishek, and F. Antonio Medrano. 2022. "Towards Resilient UAV Swarms—A Breakdown of Resiliency Requirements in UAV Swarms" Drones 6, no. 11: 340. https://doi.org/10.3390/drones6110340
APA StylePhadke, A., & Medrano, F. A. (2022). Towards Resilient UAV Swarms—A Breakdown of Resiliency Requirements in UAV Swarms. Drones, 6(11), 340. https://doi.org/10.3390/drones6110340