

Wind Speed Measurement by an Inexpensive and Lightweight Thermal Anemometer on a Small UAV

Abstract
1. Introduction
2. Materials and Methods
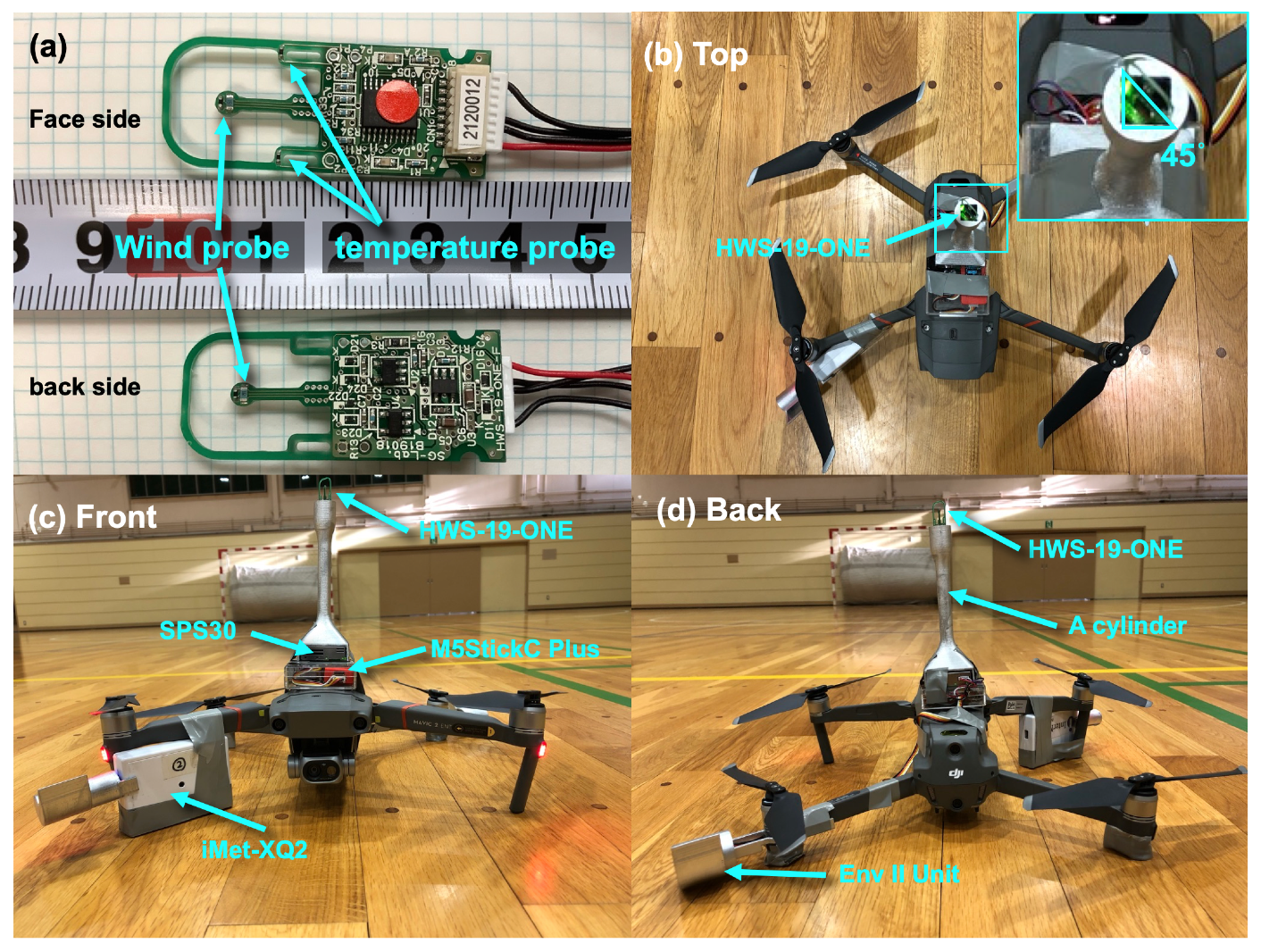
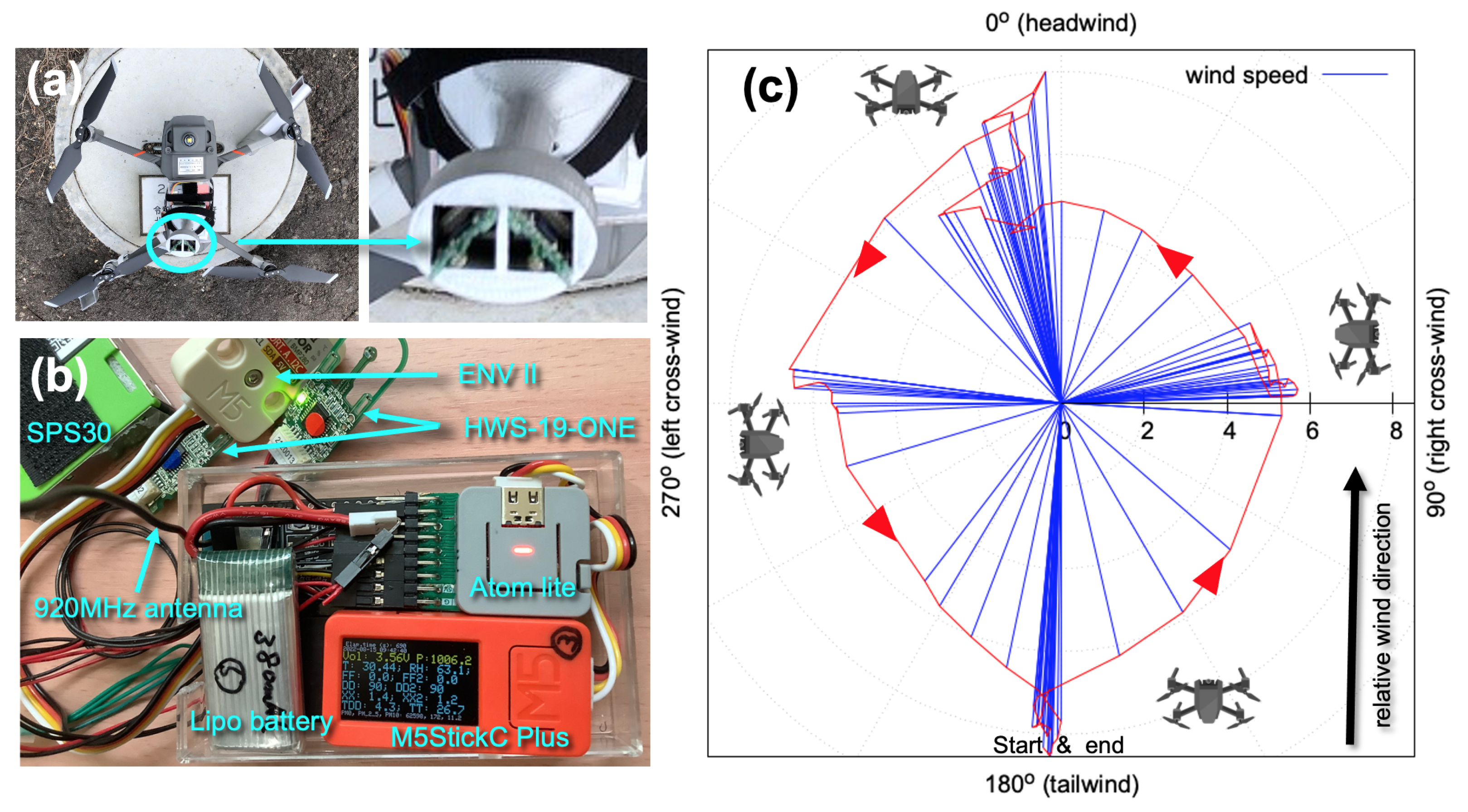
2.1. A Thermal Anemometer: HWS-19-ONE
2.2. A UAV: DJI Mavic2 Enterprise Dual (M2)
2.3. Device Assembly
3. Laboratory Experiments
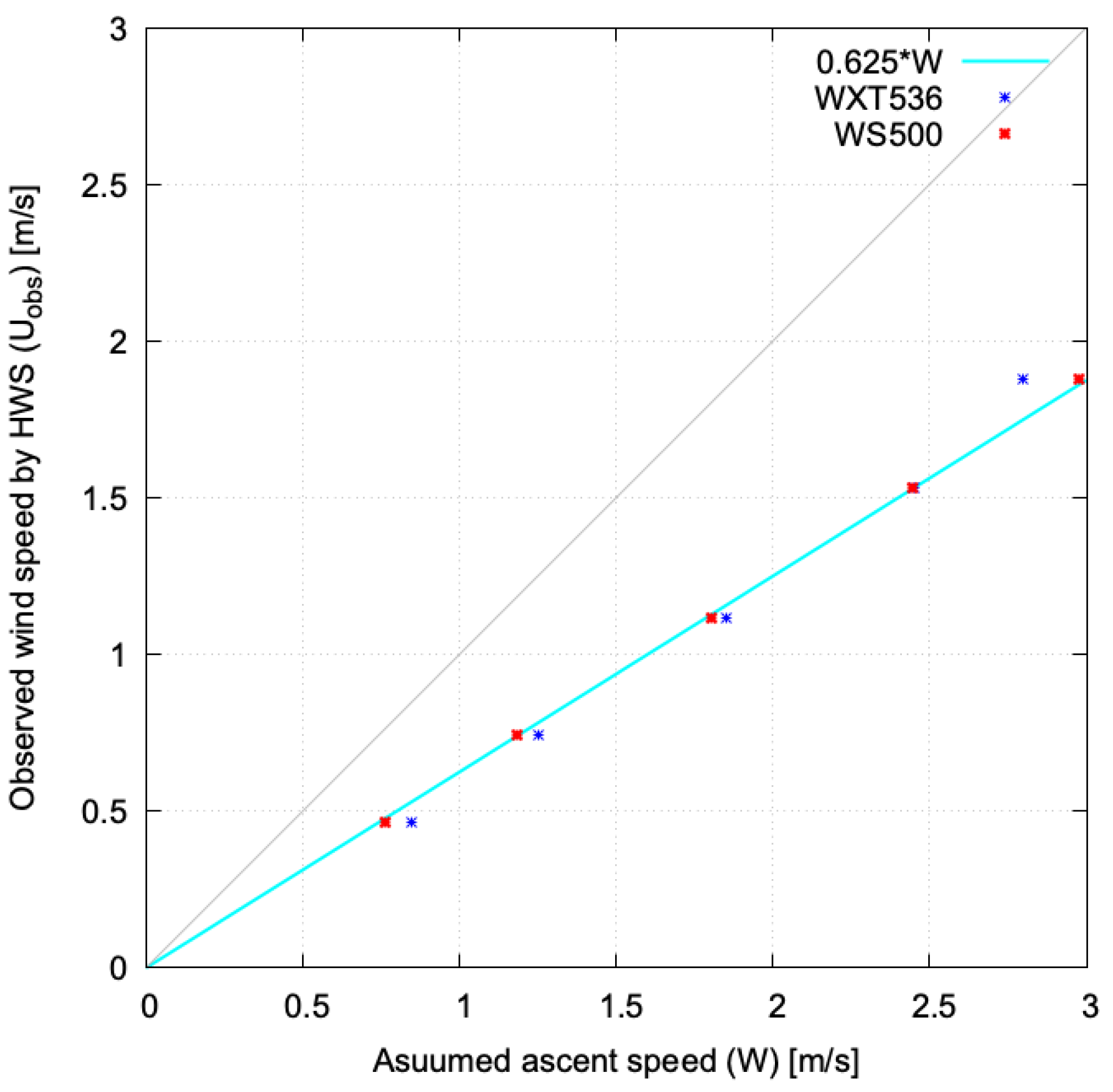
3.1. Fan Experiments
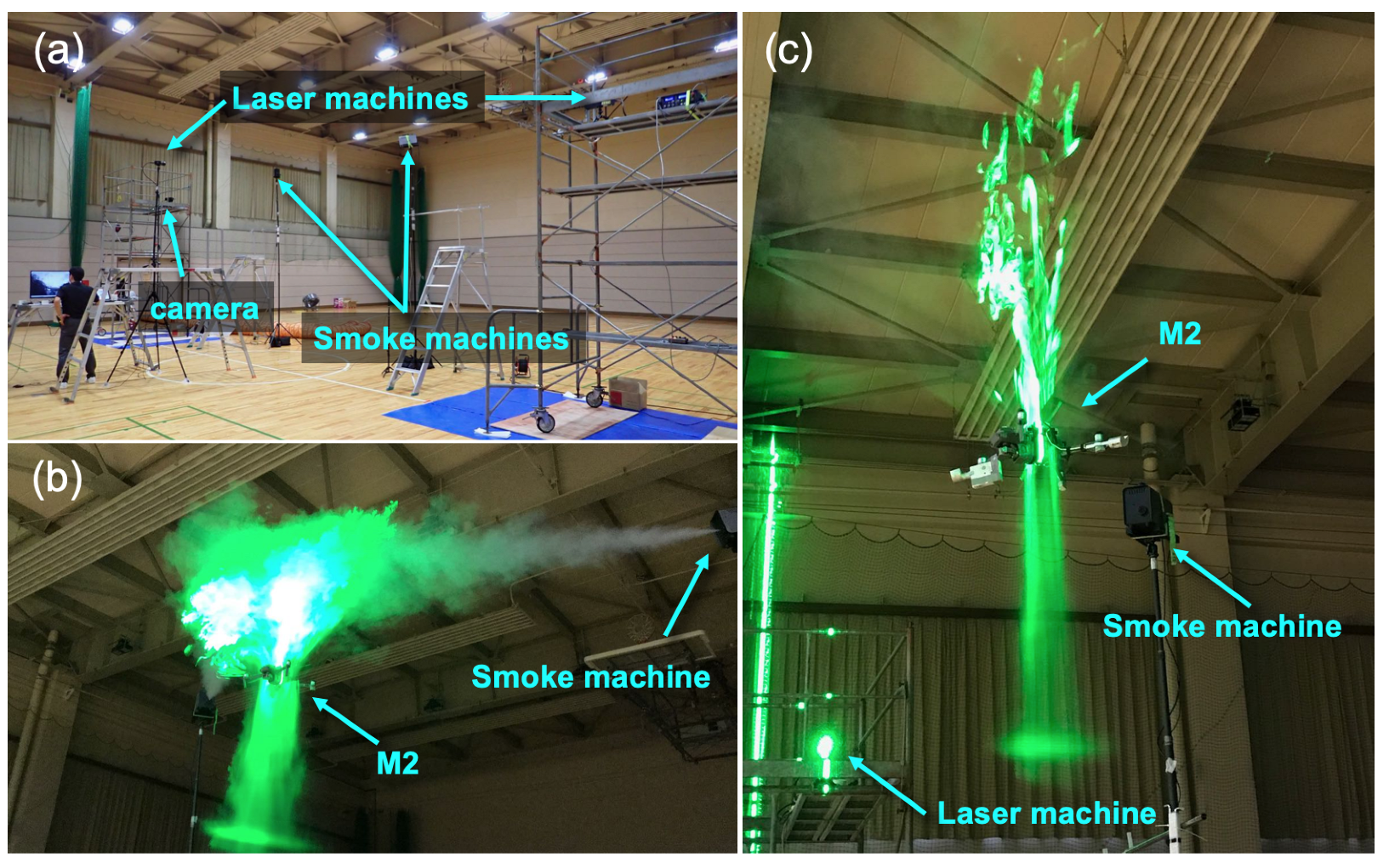
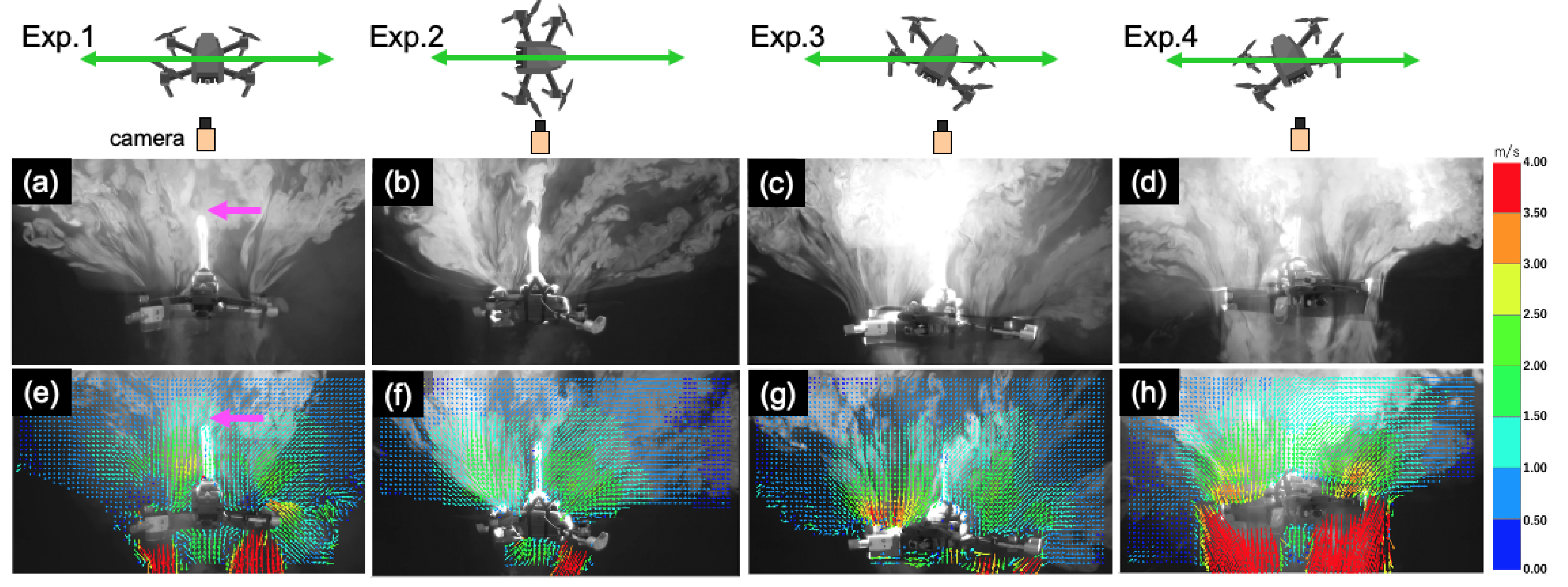
3.2. Smoke Visualization Experiments
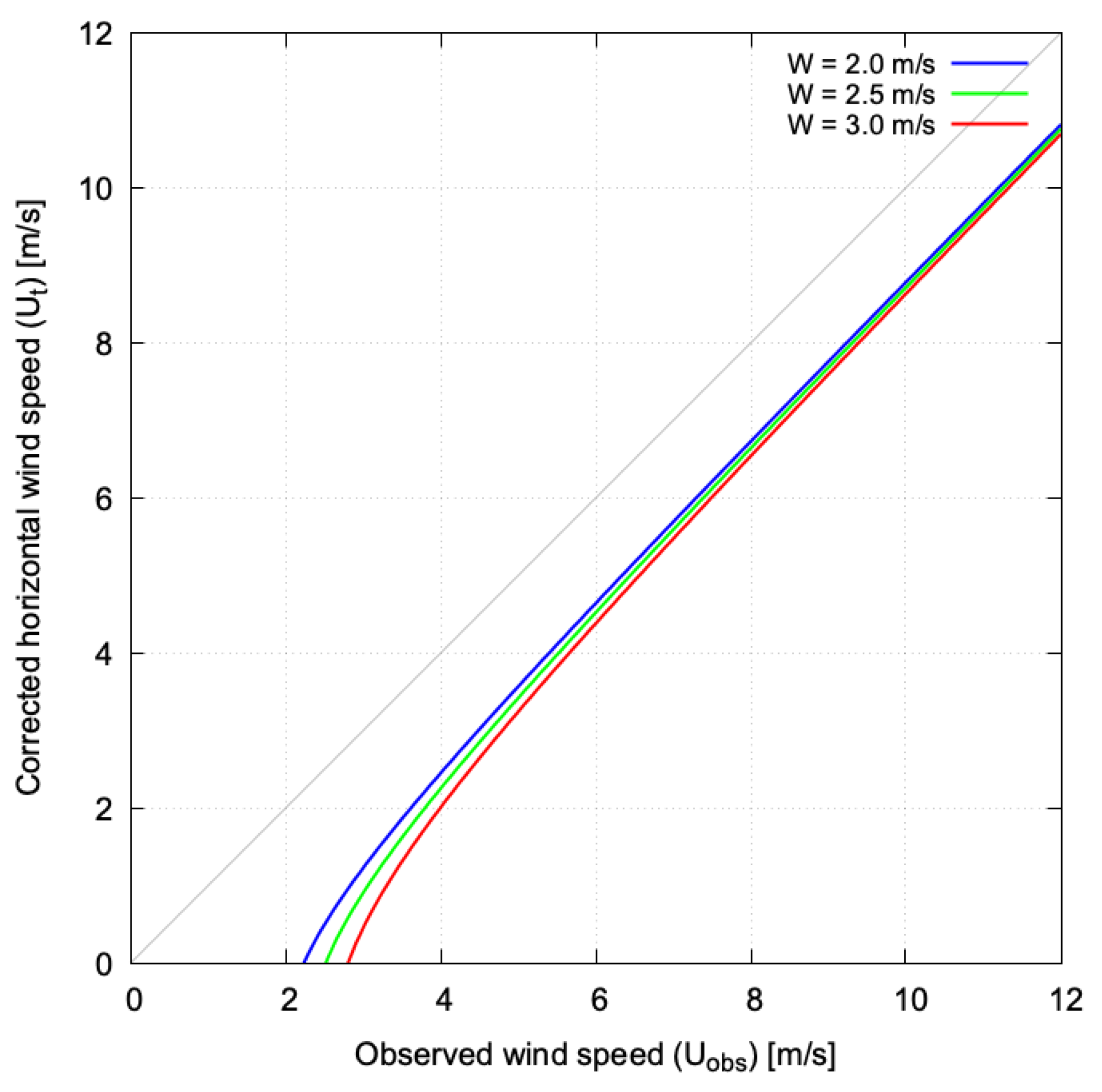
3.3. Bias Correction
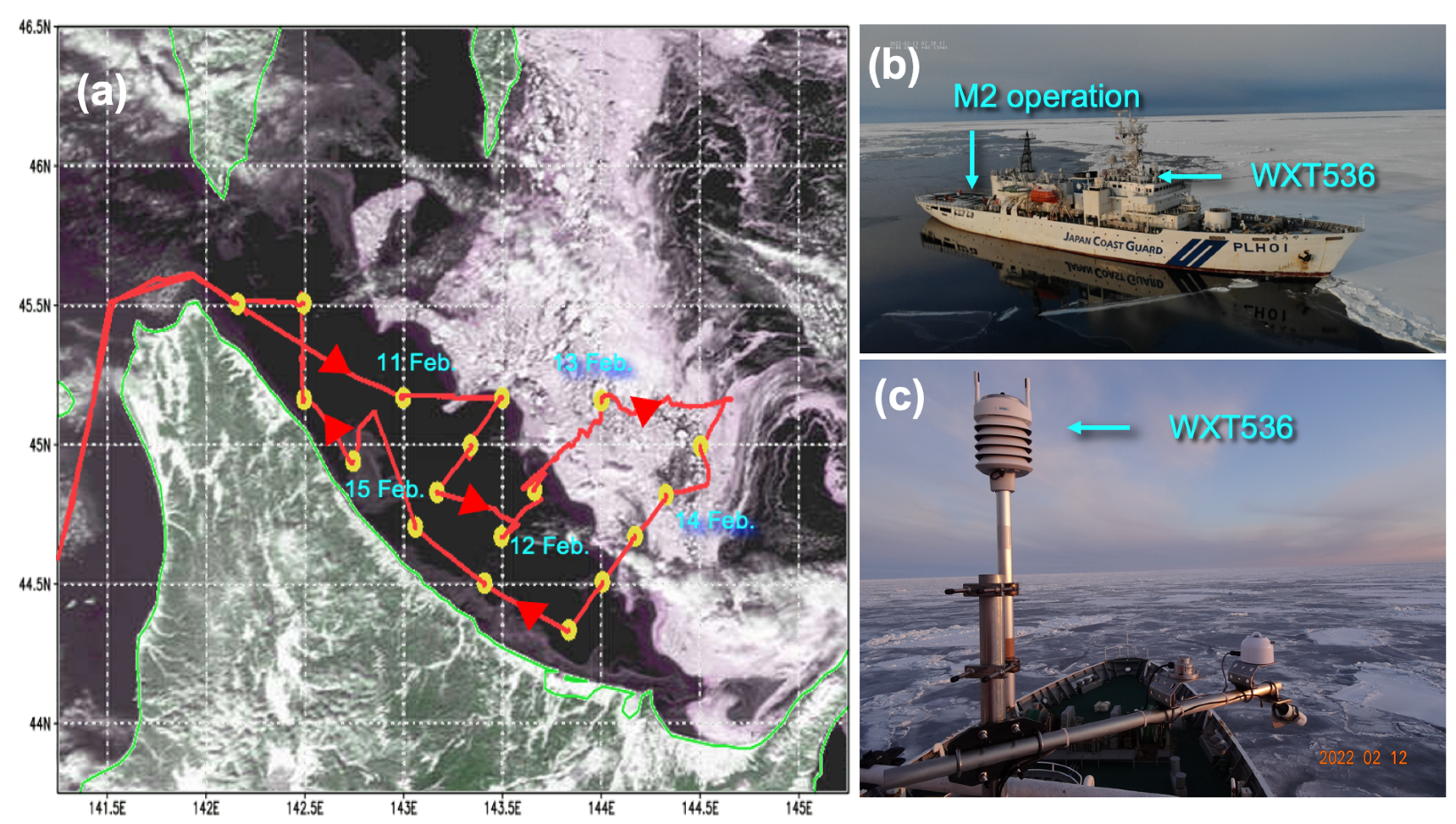
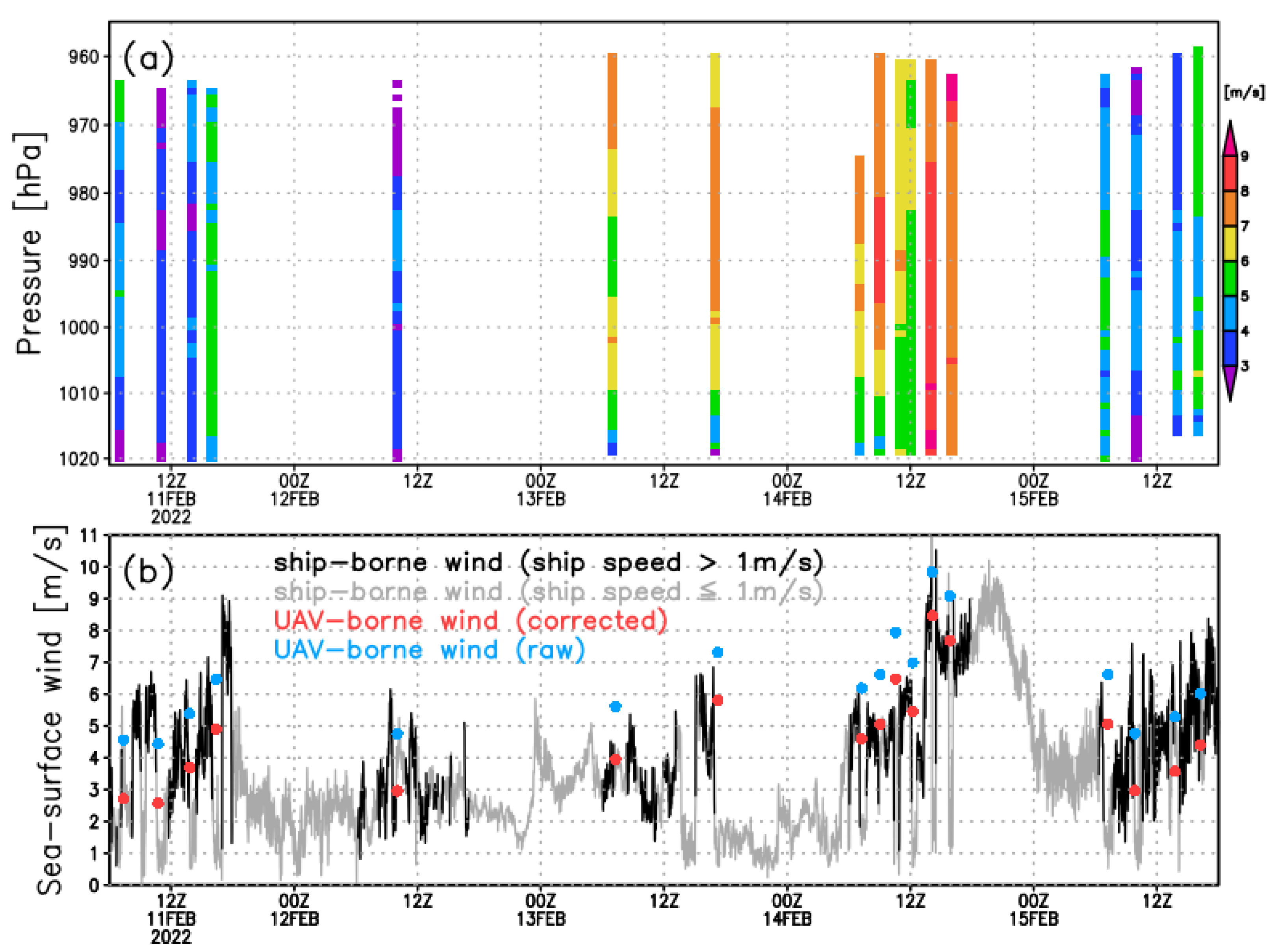
4. Field Experiments
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| BVLOS | beyond visual line of sight |
| NWPs | Numerical Weather Predictions |
| OSCAR | Observing Systems Capability Analysis and Review tool |
| UAVs | Unmanned Aerial Vehicles |
| WMO | World Meteorological Organization |
References
- McFarquhar, G.M.; Smith, E.; Pillar-Little, E.A.; Brewster, K.; Chilson, P.B.; Lee, T.R.; Waugh, S.; Yussouf, N.; Wang, X.; Xue, M.; et al. Current and Future Uses of UAS for Improved Forecasts/Warnings and Scientific Studies. Bull. Am. Meteorol. Soc. 2020, 101, E1322–E1328. [Google Scholar] [CrossRef]
- Kren, A.C.; Cucurull, L.; Wang, H. Impact of UAS Global Hawk Dropsonde Data on Tropical and Extratropical Cyclone Forecasts in 2016. Weather Forecast. 2018, 33, 1121–1141. [Google Scholar] [CrossRef]
- Inoue, J.; Curry, J.A. Application of Aerosondes to high-resolution observations of sea surface temperature over Barrow Canyon. Geophys. Res. Lett. 2004, 31, L14312. [Google Scholar] [CrossRef]
- Inoue, J.; Curry, J.A.; Maslanik, J.A. Application of Aerosondes to Melt-Pond Observations over Arctic Sea Ice. J. Atmos. Ocean. Technol. 2008, 25, 327–334. [Google Scholar] [CrossRef]
- Intrieri, J.M.; de Boer, G.; Shupe, M.D.; Spackman, J.R.; Wang, J.; Neiman, P.J.; Wick, G.A.; Hock, T.F.; Hood, R.E. Global Hawk dropsonde observations of the Arctic atmosphere obtained during the Winter Storms and Pacific Atmospheric Rivers (WISPAR) field campaign. Atmos. Meas. Tech. 2014, 7, 3917–3926. [Google Scholar] [CrossRef]
- de Boer, G.; Ivey, M.; Schmid, B.; Lawrence, D.; Dexheimer, D.; Mei, F.; Hubbe, J.; Bendure, A.; Hardesty, J.; Shupe, M.D.; et al. A Bird’s-Eye View: Development of an Operational ARM Unmanned Aerial Capability for Atmospheric Research in Arctic Alaska. Bull. Am. Meteorol. Soc. 2018, 99, 1197–1212. [Google Scholar] [CrossRef]
- Dainelli, R.; Toscano, P.; Di Gennaro, S.; Matese, A. Recent Advances in Unmanned Aerial Vehicle Forest Remote Sensing—A Systematic Review. Part I: A General Framework. Forests 2021, 12, 327. [Google Scholar] [CrossRef]
- Pinto, J.O.; O’Sullivan, D.; Taylor, S.; Elston, J.; Baker, C.B.; Hotz, D.; Marshall, C.; Jacob, J.; Barfuss, K.; Piguet, B.; et al. The Status and Future of Small Uncrewed Aircraft Systems (UAS) in Operational Meteorology. Bull. Am. Meteorol. Soc. 2021, 102, E2121–E2136. [Google Scholar] [CrossRef]
- Flagg, D.D.; Doyle, J.D.; Holt, T.R.; Tyndall, D.P.; Amerault, C.M.; Geiszler, D.; Haack, T.; Moskaitis, J.R.; Nachamkin, J.; Eleuterio, D.P. On the Impact of Unmanned Aerial System Observations on Numerical Weather Prediction in the Coastal Zone. Mon. Weather Rev. 2018, 146, 599–622. [Google Scholar] [CrossRef]
- Jensen, A.A.; Pinto, J.O.; Bailey, S.C.C.; Sobash, R.A.; de Boer, G.; Houston, A.L.; Chilson, P.B.; Bell, T.; Romine, G.; Smith, S.W.; et al. Assimilation of a Coordinated Fleet of Uncrewed Aircraft System Observations in Complex Terrain: EnKF System Design and Preliminary Assessment. Mon. Weather Rev. 2021, 149, 1459–1480. [Google Scholar] [CrossRef]
- Chilson, P.B.; Bell, T.M.; Brewster, K.A.; Britto Hupsel de Azevedo, G.; Carr, F.H.; Carson, K.; Doyle, W.; Fiebrich, C.A.; Greene, B.R.; Grimsley, J.L.; et al. Moving towards a Network of Autonomous UAS Atmospheric Profiling Stations for Observations in the Earth’s Lower Atmosphere: The 3D Mesonet Concept. Sensors 2019, 19, 2720. [Google Scholar] [CrossRef]
- Leuenberger, D.; Haefele, A.; Omanovic, N.; Fengler, M.; Martucci, G.; Calpini, B.; Fuhrer, O.; Rossa, A. Improving High-Impact Numerical Weather Prediction with Lidar and Drone Observations. Bull. Am. Meteorol. Soc. 2020, 101, E1036–E1051. [Google Scholar] [CrossRef]
- Greene, B.R.; Segales, A.R.; Waugh, S.; Duthoit, S.; Chilson, P.B. Considerations for temperature sensor placement on rotary-wing unmanned aircraft systems. Atmos. Meas. Tech. 2018, 11, 5519–5530. [Google Scholar] [CrossRef]
- Kimball, S.K.; Montalvo, C.J.; Mulekar, M.S. Assessing iMET-XQ Performance and Optimal Placement on a Small Off-the-Shelf, Rotary-Wing UAV, as a Function of Atmospheric Conditions. Atmosphere 2020, 11, 660. [Google Scholar] [CrossRef]
- Inoue, J.; Sato, K. Toward sustainable meteorological profiling in polar regions: Case studies using an inexpensive UAS on measuring lower boundary layers with quality of radiosondes. Environ. Res. 2022, 205, 112468. [Google Scholar] [CrossRef]
- Lee, T.R.; Buban, M.; Dumas, E.; Baker, C.B. On the Use of Rotary-Wing Aircraft to Sample Near-Surface Thermodynamic Fields: Results from Recent Field Campaigns. Sensors 2019, 19, 10. [Google Scholar] [CrossRef]
- Greene, B.R.; Segales, A.R.; Bell, T.M.; Pillar-Little, E.A.; Chilson, P.B. Environmental and Sensor Integration Influences on Temperature Measurements by Rotary-Wing Unmanned Aircraft Systems. Sensors 2019, 19, 1470. [Google Scholar] [CrossRef]
- Barbieri, L.; Kral, S.T.; Bailey, S.C.C.; Frazier, A.E.; Jacob, J.D.; Reuder, J.; Brus, D.; Chilson, P.B.; Crick, C.; Detweiler, C.; et al. Intercomparison of Small Unmanned Aircraft System (sUAS) Measurements for Atmospheric Science during the LAPSE-RATE Campaign. Sensors 2019, 19, 2179. [Google Scholar] [CrossRef]
- Wang, J.Y.; Luo, B.; Zeng, M.; Meng, Q.H. A Wind Estimation Method with an Unmanned Rotorcraft for Environmental Monitoring Tasks. Sensors 2018, 18, 4504. [Google Scholar] [CrossRef]
- Segales, A.R.; Greene, B.R.; Bell, T.M.; Doyle, W.; Martin, J.J.; Pillar-Little, E.A.; Chilson, P.B. The CopterSonde: An insight into the development of a smart unmanned aircraft system for atmospheric boundary layer research. Atmos. Meas. Tech. 2020, 13, 2833–2848. [Google Scholar] [CrossRef]
- Bell, T.M.; Greene, B.R.; Klein, P.M.; Carney, M.; Chilson, P.B. Confronting the boundary layer data gap: Evaluating new and existing methodologies of probing the lower atmosphere. Atmos. Meas. Tech. 2020, 13, 3855–3872. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| size | 15 mm × 38 mm × 7 mm |
| weight | 1 g |
| wind range | 0.0−20.0 m s |
| minimum measuring interval | 0.25 s |
| directivity error | ±10% |
| response time | 15 s |
| operating environments | Temperature: 0−50 C; RH: 20−90% |
| input voltage | 3.5∼5 V |
| data output | serial communication |
| price | <$200 |
| HWS (m s) | WXT536 (m s) | Bias (m s) | Averaged Period (min) | |
|---|---|---|---|---|
| 1st | 3.9 | 3.0 | 0.9 | 18 |
| 2nd | 4.1 | 3.0 | 1.1 | 15 |
| HWS (m s) | WXT536 (m s) | WS500 (m s) | Averaged Period (min) | |
|---|---|---|---|---|
| 1st | 0.47 | 0.85 | 0.76 | 2 |
| 2nd | 0.74 | 1.25 | 1.20 | 2 |
| 3rd | 1.12 | 1.85 | 1.81 | 2 |
| 4th | 1.53 | 2.45 | 2.44 | 2 |
| 5th | 1.88 | 2.80 | 2.98 | 2 |
| HWS (m s) | (m s) | (m s) | |
|---|---|---|---|
| exp.1 | 0.95 | −0.35 | −1.27 |
| exp.2 | 0.68 | −0.44 | −0.98 |
| exp.3 | 0.81 | −0.41 | −1.40 |
| exp.4 | 0.63 | −0.31 | −1.07 |
| average | 0.77 | −0.38 | −1.18 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Inoue, J.; Sato, K. Wind Speed Measurement by an Inexpensive and Lightweight Thermal Anemometer on a Small UAV. Drones 2022, 6, 289. https://doi.org/10.3390/drones6100289
Inoue J, Sato K. Wind Speed Measurement by an Inexpensive and Lightweight Thermal Anemometer on a Small UAV. Drones. 2022; 6(10):289. https://doi.org/10.3390/drones6100289
Chicago/Turabian StyleInoue, Jun, and Kazutoshi Sato. 2022. "Wind Speed Measurement by an Inexpensive and Lightweight Thermal Anemometer on a Small UAV" Drones 6, no. 10: 289. https://doi.org/10.3390/drones6100289
APA StyleInoue, J., & Sato, K. (2022). Wind Speed Measurement by an Inexpensive and Lightweight Thermal Anemometer on a Small UAV. Drones, 6(10), 289. https://doi.org/10.3390/drones6100289