
Decentralized Sampled-Data Fuzzy Tracking Control for a Quadrotor UAV with Communication Delay



Abstract
:1. Introduction
- A novel sampled-data fuzzy tracking controller structure that consists of two different types of decentralized controllers for a quadrotor UAV with communication delay is proposed.
- The LKF introduced in most previous studies on memory sampled-data control is improved to minimize computational complexity due to dimensional increase from unnecessary states.
2. Preliminaries and Problem Formulation
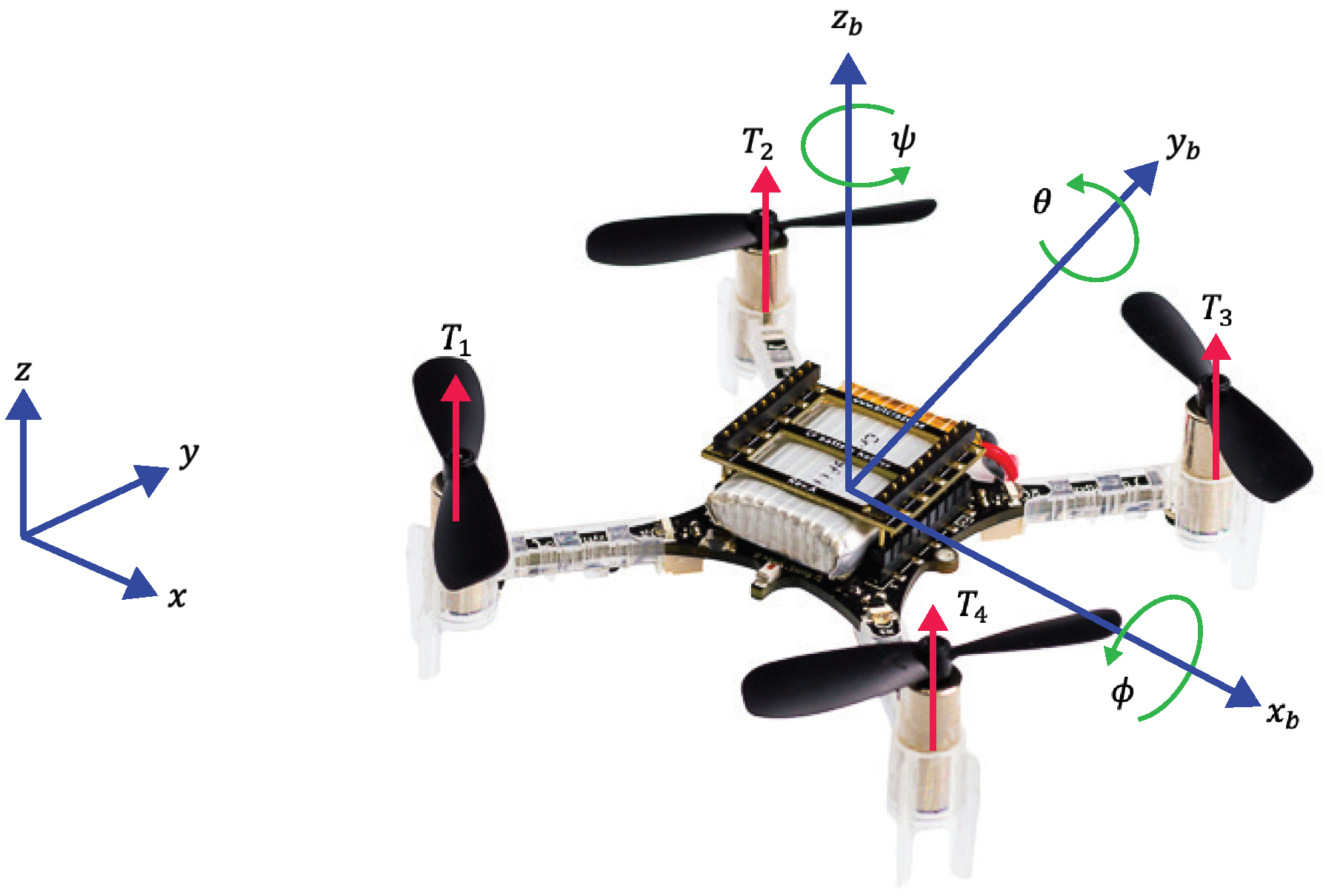
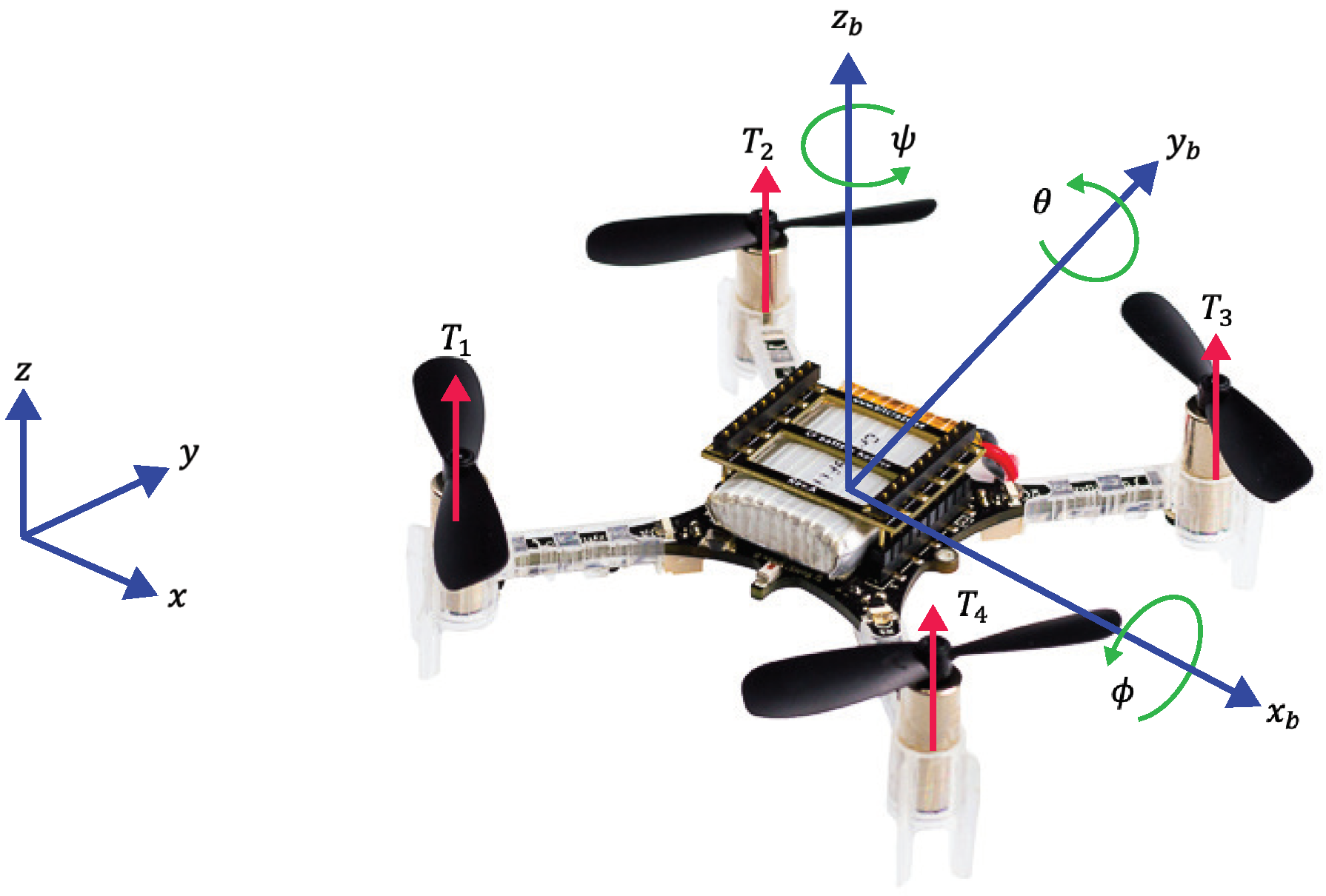
2.1. Dynamics of the Quadrotor UAV
2.2. T–S Fuzzy Model-Based Tracking Error Dynamics
- the equilibrium of is asymptotically stable when , , and ;
- the following inequality is guaranteed for a given positive scalar :where denotes the termination time of control, and represents a value of the scalar function at .
2.3. Required Lemmas
3. Main Results
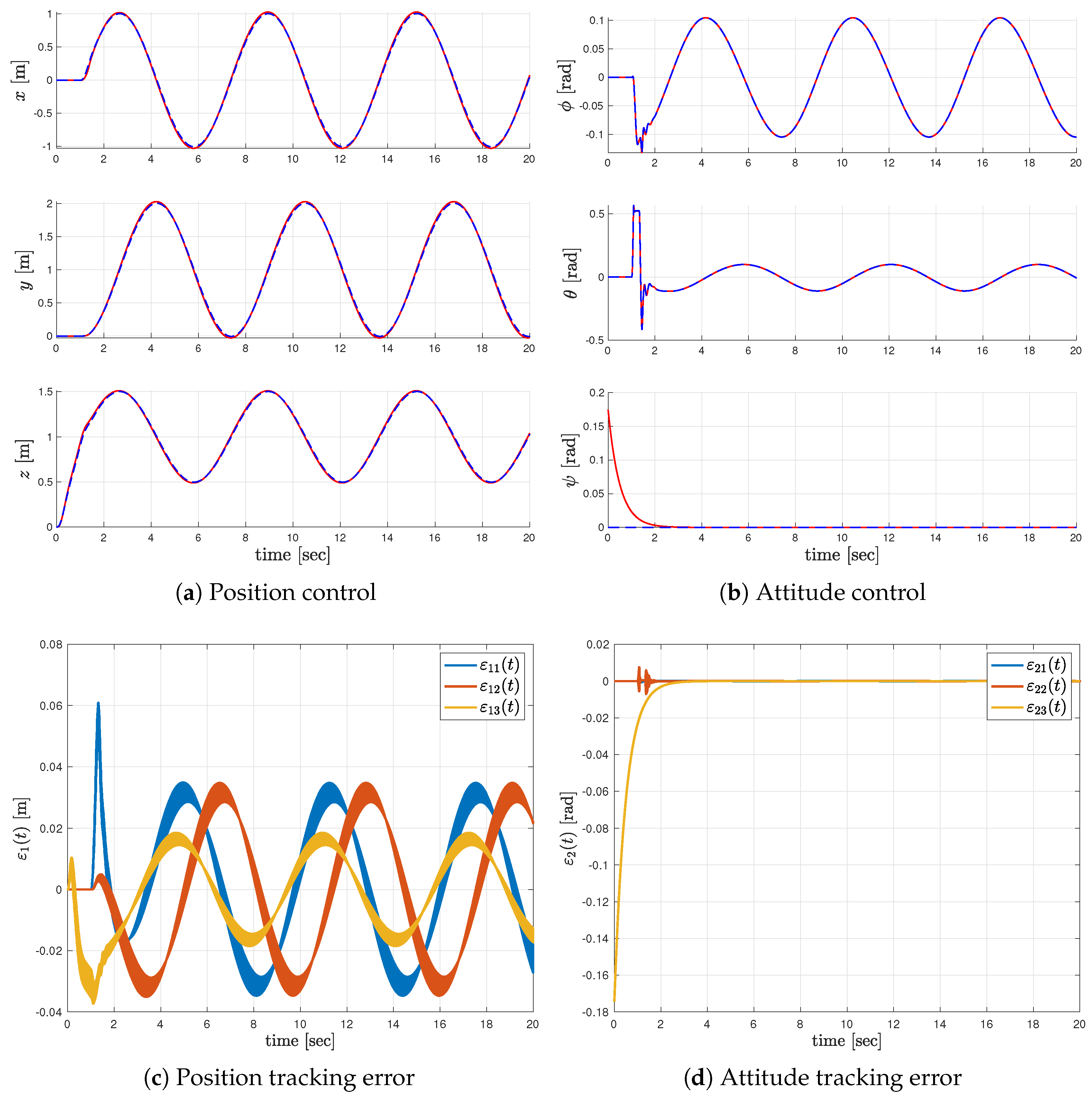
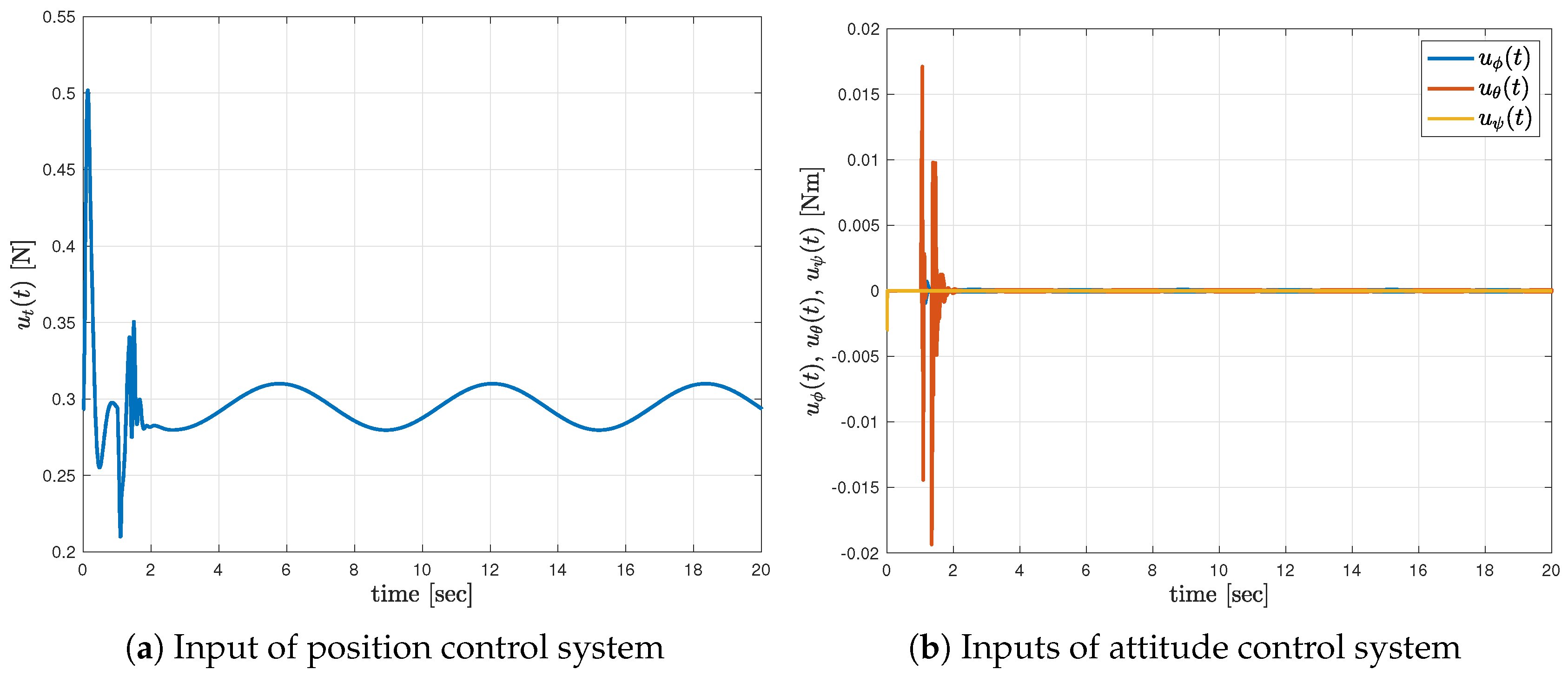
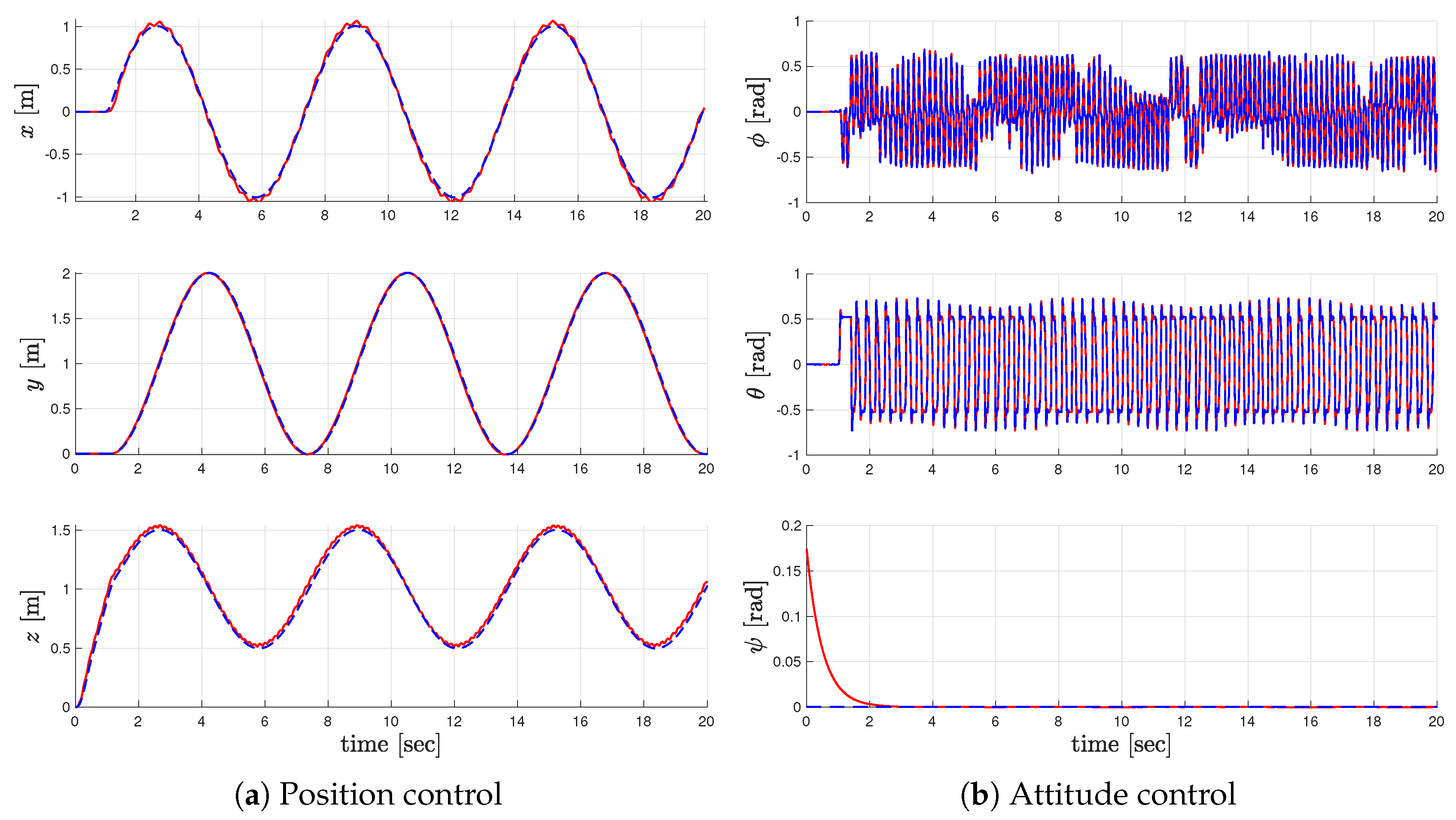
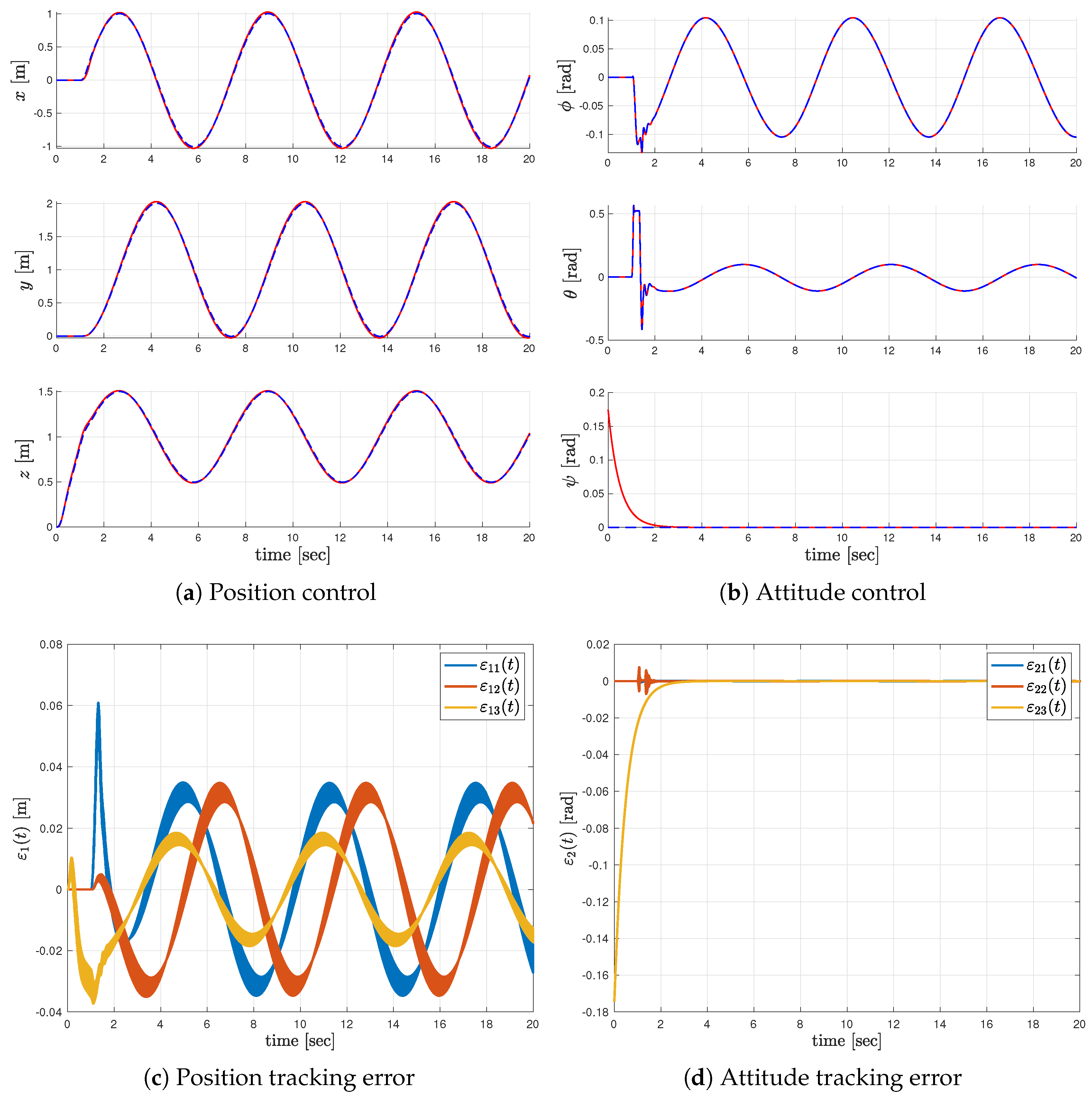
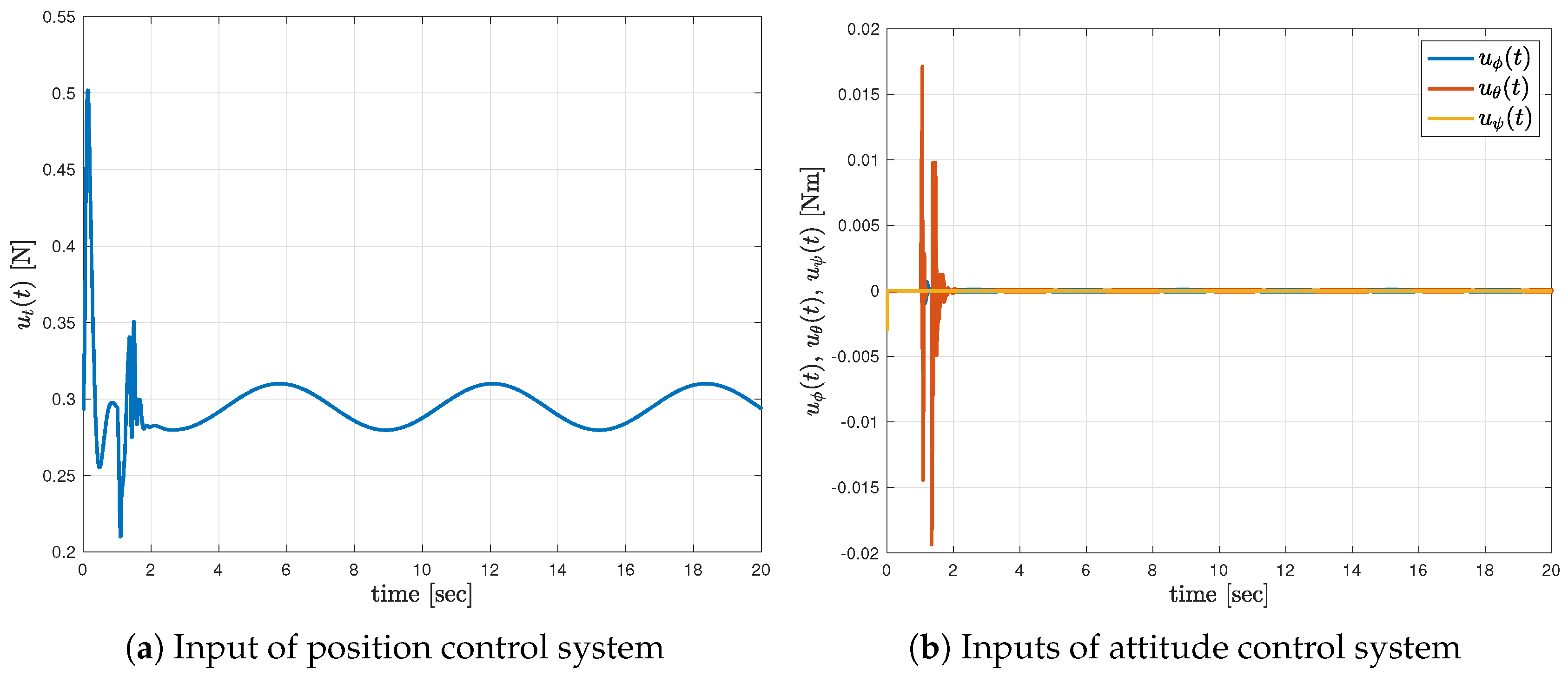
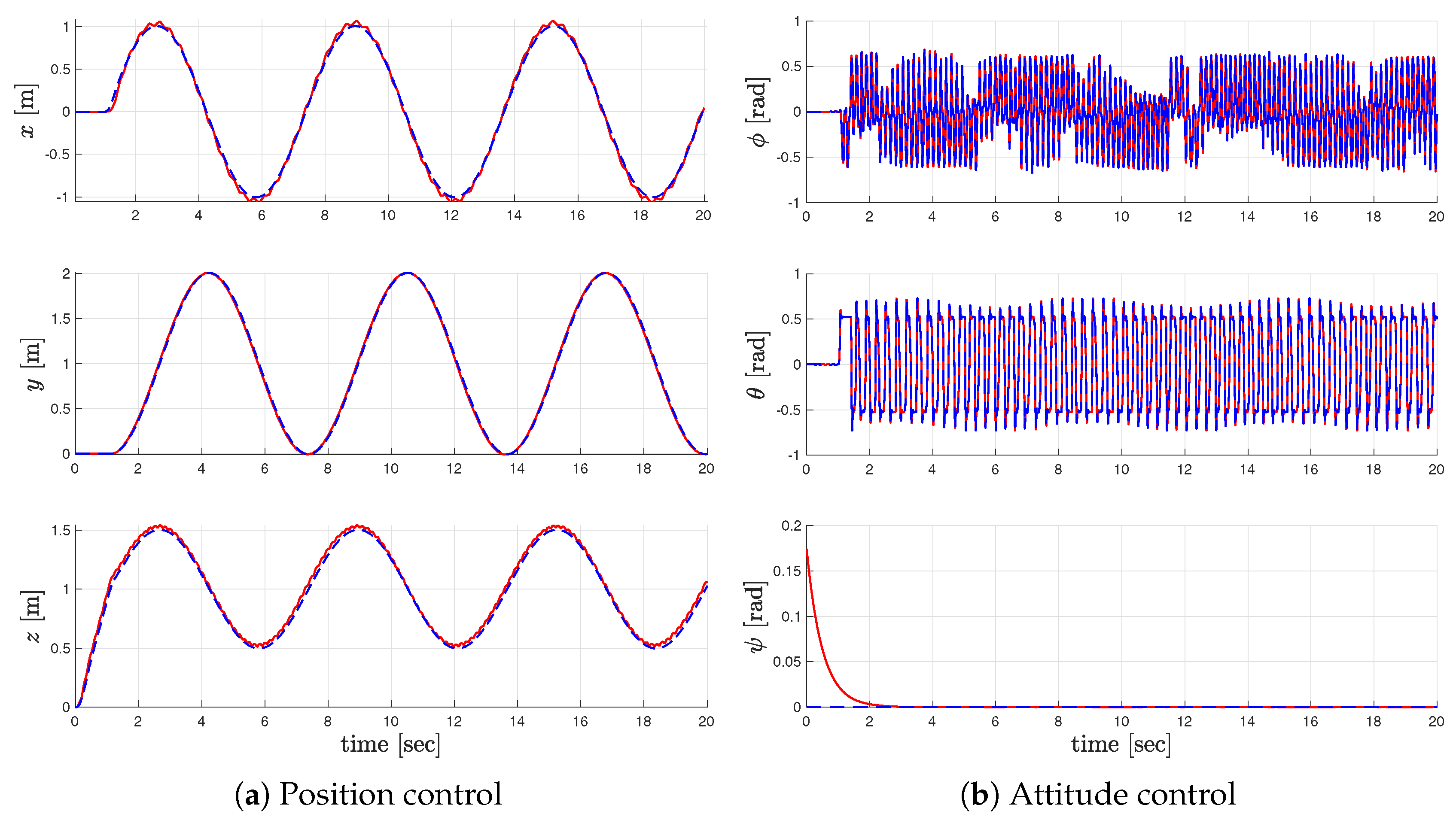
4. Simulation Examples
5. Conclusions and Future Works
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Idrissi, M.; Salami, M.; Annaz, F. A Review of quadrotor unmanned aerial vehicles: Applications, architectural design and control algorithms. J. Intell. Robot Syst. 2022, 104, 22. [Google Scholar] [CrossRef]
- Salih, A.L.; Moghavvemi, M.; Mohamed, H.A.F.; Gaeid, K.S. Modelling and PID controller design for a quadrotor unmanned air vehicle. In Proceedings of the IEEE International Conference on Automatation, Quality and Testing, Robotics (AQTR), Cluj-Napoca, Romania, 28–30 May 2010; pp. 1–5. [Google Scholar]
- Li, J.; Li, Y. Dynamic analysis and PID control for a quadrotor. In Proceedings of the IEEE International Conference on Mechatronics and Automation, Beijing, China, 7–10 August 2011; pp. 573–578. [Google Scholar]
- Gaicia, R.A.; Rubio, F.R.; Ortega, M.G. Robust PID control of the quadrotor helicopter. IFAC Proc. 2012, 45, 229–234. [Google Scholar]
- Zhang, X.; Chen, C.; Su, K.; Lin, L.; Tian, Y. Design of the outdoor cruising control system of the quadrotor drone. IOP Conf. Ser. Earth Environ. Sci. 2021, 632, 022062. [Google Scholar] [CrossRef]
- Bouabdallah, S.; Noth, A.; Siegwart, R. PID vs LQ control techniques applied to an indoor micro quadrotor. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Sendai, Japan, 28 September–2 October 2004; pp. 2451–2456. [Google Scholar]
- Castillo, P.; Lozano, R.; Dzul, A. Stabilization of a mini rotorcraft with four rotors. IEEE Control Syst. Mag. 2005, 25, 44–55. [Google Scholar]
- Reyes-Valeria, E.; Enriquez-Caldera, R.; Camacho-Lara, S.; Guichard, J. LQR control for a quadrotor using unit quaternions: Modeling and simulation. In Proceedings of the 23rd International Conference on Electronics, Communications and Computing (CONIELECOMP), Cholula, Puebla, Mexico, 11–13 March 2013; pp. 172–178. [Google Scholar]
- Zhao, S.; An, H.; Zhang, D.; Shen, L. A new feedback linearization LQR control for attitude of quadrotor. In Proceedings of the 13th International Conference on Control Automation Robotics & Vision (ICARCV), Singapore, 10–12 December 2014; pp. 1593–1597. [Google Scholar]
- Wang, B.; Zhang, Y.; Zhang, W. Integrated path planning and trajectory tracking control for quadrotor UAVs with obstacle avoidance in the presence of environmental and systematic uncertainties: Theory and experiment. Aerosp. Sci. Technol. 2022, 120, 107277. [Google Scholar] [CrossRef]
- Raffo, G.V.; Ortega, M.G.; Rubio, F.R. Backstepping/nonlinear H∞ control for path tracking of a quadrotor unmanned aerial vehicle. In Proceedings of the American Control Conference (ACC2008), Seattle, WA, USA, 11–13 June 2008; pp. 3356–3361. [Google Scholar]
- Yu, G.; Cabecinhas, D.; Cunha, R.; Silvestre, C. Nonlinear backstepping control of a quadrotor-slung load system. IEEE/ASME Trans. Mechatron. 2019, 24, 2304–2315. [Google Scholar] [CrossRef]
- Almakhles, D.J. Robust backstepping sliding mode control for a quadrotor trajectory tracking application. IEEE Access 2019, 8, 5515–5525. [Google Scholar] [CrossRef]
- Xu, L.-X.; Ma, H.-J.; Guo, D.; Xie, A.-H.; Song, D.-L. Backstepping sliding-mode and cascade active disturbance rejection control for a quadrotor UAV. IEEE/ASME Trans. Mechatron. 2020, 25, 2743–2753. [Google Scholar] [CrossRef]
- Kim, H.S.; Hwang, S.; Joo, Y.H. Interval type-2 fuzzy-model-based fault-tolerant sliding mode tracking control of a quadrotor UAV under actuator saturation. IET Control Theory Appl. 2020, 14, 3663–3675. [Google Scholar] [CrossRef]
- Lian, S.; Meng, W.; Lin, Z.; Zheng, J.; Li, H.; Lu, R. Adaptive attitude control of a quadrotor using fast nonsingular terminal sliding mode. IEEE Trans. Ind. Electron. 2021, 69, 1597–1607. [Google Scholar] [CrossRef]
- Huang, S.; Yang, Y. Adaptive neural-network-based nonsingular fast terminal sliding mode control for a quadrotor with dynamic uncertainty. Drones 2022, 6, 206. [Google Scholar] [CrossRef]
- Nguyen, N.P.; Park, D.; Ngoc, D.N.; Xuan-Mung, N.; Huynh, T.T.; Nguyen, T.N.; Hong, S.K. Quadrotor formation control via terminal sliding mode approach: Theory and experiment results. Drones 2022, 6, 172. [Google Scholar] [CrossRef]
- Elmokadem, T.; Savkin, A.V. A method for autonomous collision-free navigation of a quadrotor UAV in unknown tunnel-like environments. Robotica 2022, 40, 835–861. [Google Scholar] [CrossRef]
- Yacef, F.; Bouhali, O.; Khebbache, H.; Boudjema, F. Takagi–Sugeno model for quadrotor modelling and control using nonlinear state feedback controller. Int. J. Control Theory Comput. Model. 2012, 2, 9–24. [Google Scholar] [CrossRef]
- Lee, H.; Kim, H.J. Robust control of a quadrotor using Takagi–Sugeno fuzzy model and an LMI approach. In Proceedings of the 14th International Conference on Control, Automation and Systems (ICCAS 2014), Seoul, Korea, 22–25 October 2014; pp. 270–374. [Google Scholar]
- Fu, C.; Sarabakha, A.; Kayacan, E.; Wagner, C.; John, R.; Garibaldi, J.M. Input uncertainty sensitivity enhanced nonsingleton fuzzy logic controllers for long-term navigation of quadrotor UAVs. IEEE/ASME Trans. Mechatron. 2018, 23, 725–734. [Google Scholar] [CrossRef]
- Kim, D.W. Fuzzy model-based control of a quadrotor. Fuzzy Sets Syst. 2019, 371, 136–147. [Google Scholar] [CrossRef]
- Zeghlache, S.; Djerioui, A.; Benyettou, L.; Benslimane, T.; Mekki, H.; Bouguerra, A. Fault tolerant control for modified quadrotor via adaptive type-2 fuzzy backstepping subject to actuator faults. ISA Trans. 2019, 95, 330–345. [Google Scholar] [CrossRef] [PubMed]
- Zhang, X.; Wang, Y.; Zhu, G.; Chen, X.; Li, Z.; Wang, C.; Su, C.-Y. Compound adaptive fuzzy quantized control for quadrotor and its experimental verification. IEEE Trans. Cybern. 2020, 51, 1121–1133. [Google Scholar] [CrossRef]
- Chen, Q.; Tao, M.; He, X.; Tao, L. Fuzzy adaptive nonsingular fixed-time attitude tracking control of quadrotor UAVs. IEEE Trans. Aerosp. Electron. Syst. 2021, 57, 2864–2877. [Google Scholar] [CrossRef]
- Kim, H.S.; Lee, K.; Joo, Y.H. Decentralized sampled-data fuzzy controller design for a VTOL UAV. J. Franklin Inst. 2021, 358, 1888–1914. [Google Scholar] [CrossRef]
- Takagi, T.; Sugeno, M. Fuzzy identification of systems and its applications to modeling and control. IEEE Trans. Syst. Man Cybern. Syst. 1985, SMC-15, 116–132. [Google Scholar] [CrossRef]
- Kim, H.S.; Lee, K. Sampled-data fuzzy observer design for nonlinear systems with a nonlinear output equation under measurement quantization. Inf. Sci. 2021, 575, 248–264. [Google Scholar] [CrossRef]
- Tanaka, K.; Wang, H.O. Fuzzy Control Systems Design and Analysis; John Wiley & Sons: Hoboken, NJ, USA, 2004. [Google Scholar]
- Liu, Y.; Park, J.H.; Gua, B.-Z. Further results on stabilization of chaotic systems based on fuzzy memory sampled-data control. IEEE. Trans. Fuzzy Syst. 2017, 26, 1040–1045. [Google Scholar] [CrossRef]
- Liu, Y.; Xia, J.; Meng, B.; Song, X.; Shen, H. Extended dissipative synchronization for semi-Markov jump complex dynamic networks via memory sampled-data control scheme. J. Franklin Inst. 2020, 357, 10900–10920. [Google Scholar] [CrossRef]
- Cheng, J.; Zhang, D.; Qi, W.; Cao, J.; Shi, K. Finite-time stabilization of T–S fuzzy semi-Markov switching systems: A coupling memory sampled-data control approach. J. Franklin Inst. 2020, 357, 11265–11280. [Google Scholar] [CrossRef]
- Zhang, J.; Liu, D.; Ma, Y.; Yu, P. Non-fragile H∞ memory sampled-data state-feedback control for continuous-time nonlinear Markovian jump fuzzy systems with time-varying delay. Inf. Sci. 2021, 577, 214–233. [Google Scholar] [CrossRef]
- Sharmila, V.; Rakkiyappan, R. Memory sampled-data controller design for interval type-2 fuzzy systems via polynomial-type Lyapunov–Krasovskii functional. IEEE Trans. Syst. Man Cybern. Syst. 2022. [Google Scholar] [CrossRef]
- Ge, C.; Park, J.H.; Hua, C.; Guan, X. Nonfragile consensus of multiagent systems based on memory sampled-data control. IEEE Trans. Syst. Man Cybern. Syst. 2018, 51, 391–399. [Google Scholar] [CrossRef]
- Saravanakumar, R.; Amini, A.; Dutta, R.; Cao, Y. Reliable memory sampled-data consensus of multi-agent systems with nonlinear actuator faults. IEEE Trans. Circuits Syst. II Exp. Briefs 2021, 69, 2201–2205. [Google Scholar] [CrossRef]
- Mu, X.; Gu, Z.; Hua, L. Memory-based event-triggered leader-following consensus for T–S fuzzy multi-agent systems subject to deception attacks. J. Franklin Inst. 2022, 359, 599–618. [Google Scholar] [CrossRef]
- Koo, G.B.; Park, J.B.; Joo, Y.H. Decentralized sampled-data fuzzy observer design for nonlinear interconnected systems. IEEE Trans. Fuzzy Syst. 2016, 24, 661–674. [Google Scholar] [CrossRef]
- Kim, H.J.; Park, J.B.; Joo, Y.H. Decentralized H∞ sampled-data fuzzy filter for nonlinear interconnected oscillating systems with uncertain interconnections. IEEE Trans. Fuzzy Syst. 2019, 28, 487–498. [Google Scholar] [CrossRef]
- Jang, Y.H.; Kim, H.S.; Kim, E.; Joo, Y.H. Decentralized sampled-data H∞ fuzzy filtering with exponential time-varying gains for nonlinear interconnected systems. Inf. Sci. 2022, 609, 1518–1538. [Google Scholar] [CrossRef]
- Liu, K.; Fridman, E. Wirtinger’s inequality and Lyapunov-based sampled-data stabilization. Automatica 2012, 48, 102–108. [Google Scholar] [CrossRef]
- Jang, Y.H.; Lee, K.; Kim, H.S. An intelligent digital redesign approach to the sampled-data fuzzy observer design. IEEE. Trans. Fuzzy Syst. 2022. [Google Scholar] [CrossRef]
- Arino, C.; Sala, A. Extensions to “Stability Analysis of Fuzzy Control Systems Subject to Uncertain Grades of Membership”. IEEE Trans. Syst. Man Cybern. B Cybern. 2008, 38, 558–563. [Google Scholar] [CrossRef] [PubMed]
- Petersen, I.R. A stabilization algorithm for a class of uncertain linear systems. Syst. Control Lett. 1987, 8, 351–357. [Google Scholar] [CrossRef]
- Budaciu, C.; Botezatu, N.; Kloetzer, M.; Burlacu, A. On the evaluation of the crazyflie modular quadcopter system. In Proceedings of the 24th IEEE International Conference on Emerging Technologies and Factory Automation (ETFA), Zaragoza, Spain, 10–13 September 2019; pp. 1189–1195. [Google Scholar]
- Löfberg, J. YALMIP: A Toolbox for Modeling and Optimization in MATLAB. In Proceedings of the CACSD Conference, Taipei, Taiwan, 2–4 September 2004; pp. 284–289. [Google Scholar]
- Andersen, E.D.; Andersen, K.D. The Mosek Interior Point Optimizer for Linear Programming: An Implementation of Homogeneous Algorithm; Springer: Boston, MA, USA, 2000; pp. 197–232. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Maximum Absolute Error | RMS Error | |||||
|---|---|---|---|---|---|---|
| 0.0609 | 0.0351 | 0.0373 | 0.0181 | 0.0187 | 0.0113 | |
| 0.1131 | 0.4170 | 0.7520 | 0.0298 | 0.0188 | 0.0306 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jang, Y.H.; Han, T.J.; Kim, H.S. Decentralized Sampled-Data Fuzzy Tracking Control for a Quadrotor UAV with Communication Delay. Drones 2022, 6, 280. https://doi.org/10.3390/drones6100280
Jang YH, Han TJ, Kim HS. Decentralized Sampled-Data Fuzzy Tracking Control for a Quadrotor UAV with Communication Delay. Drones. 2022; 6(10):280. https://doi.org/10.3390/drones6100280
Chicago/Turabian StyleJang, Yong Hoon, Tae Joon Han, and Han Sol Kim. 2022. "Decentralized Sampled-Data Fuzzy Tracking Control for a Quadrotor UAV with Communication Delay" Drones 6, no. 10: 280. https://doi.org/10.3390/drones6100280
APA StyleJang, Y. H., Han, T. J., & Kim, H. S. (2022). Decentralized Sampled-Data Fuzzy Tracking Control for a Quadrotor UAV with Communication Delay. Drones, 6(10), 280. https://doi.org/10.3390/drones6100280