
A Monocular Vision Obstacle Avoidance Method Applied to Indoor Tracking Robot




Abstract
:1. Introduction
2. Materials and Methods Training Set and Test Set Acquisition
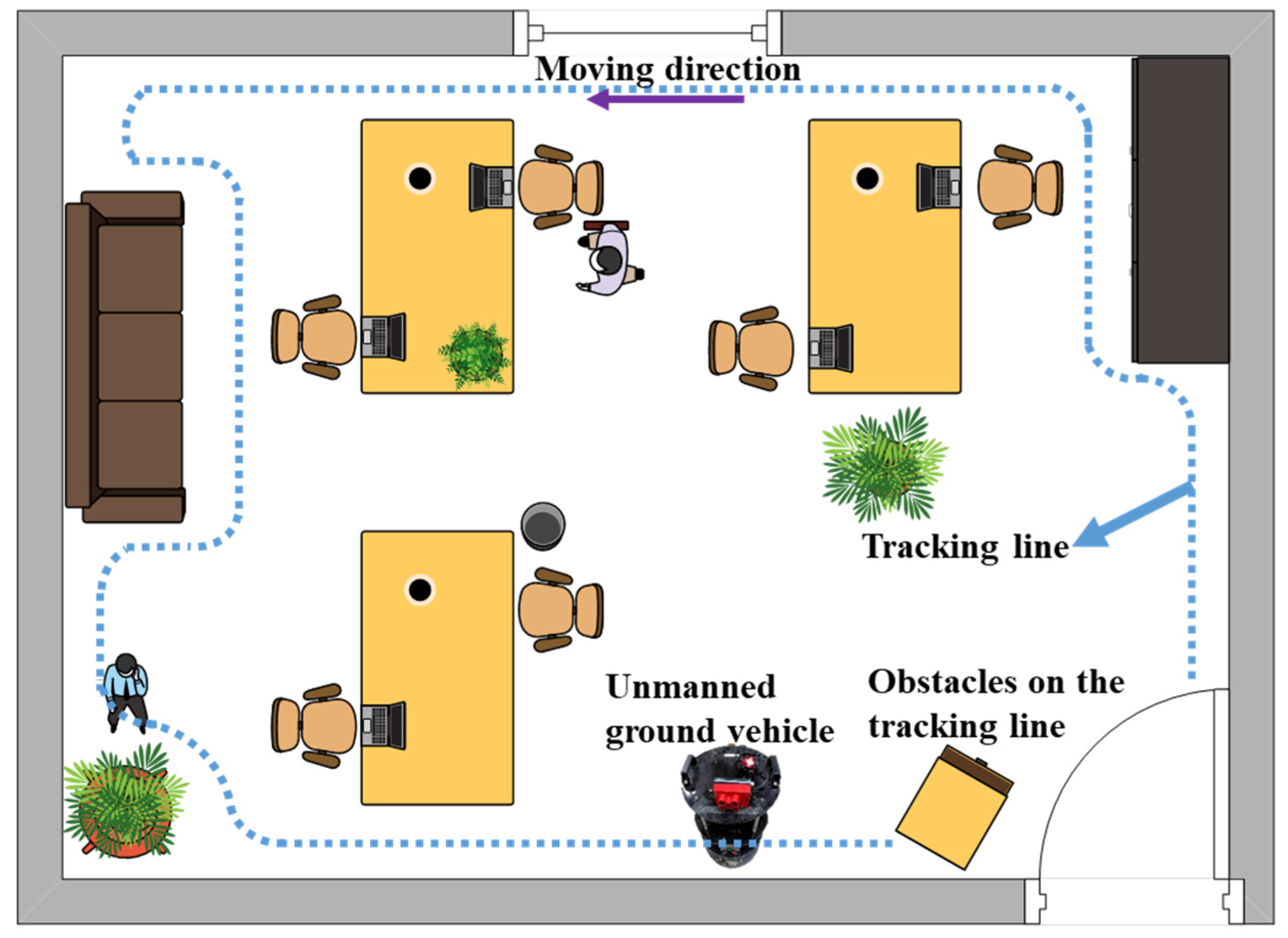
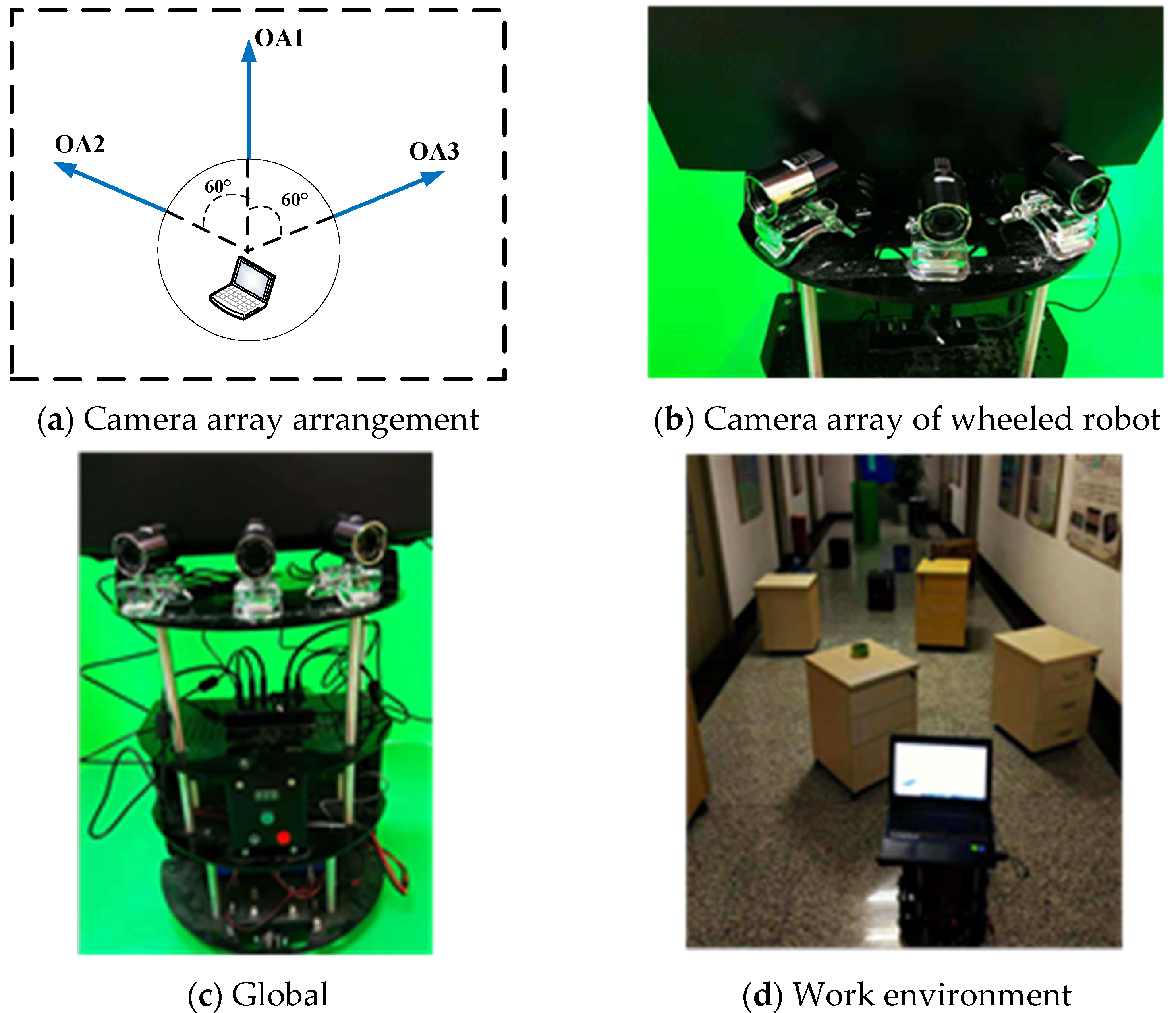
2.1. Video Stream Acquisition
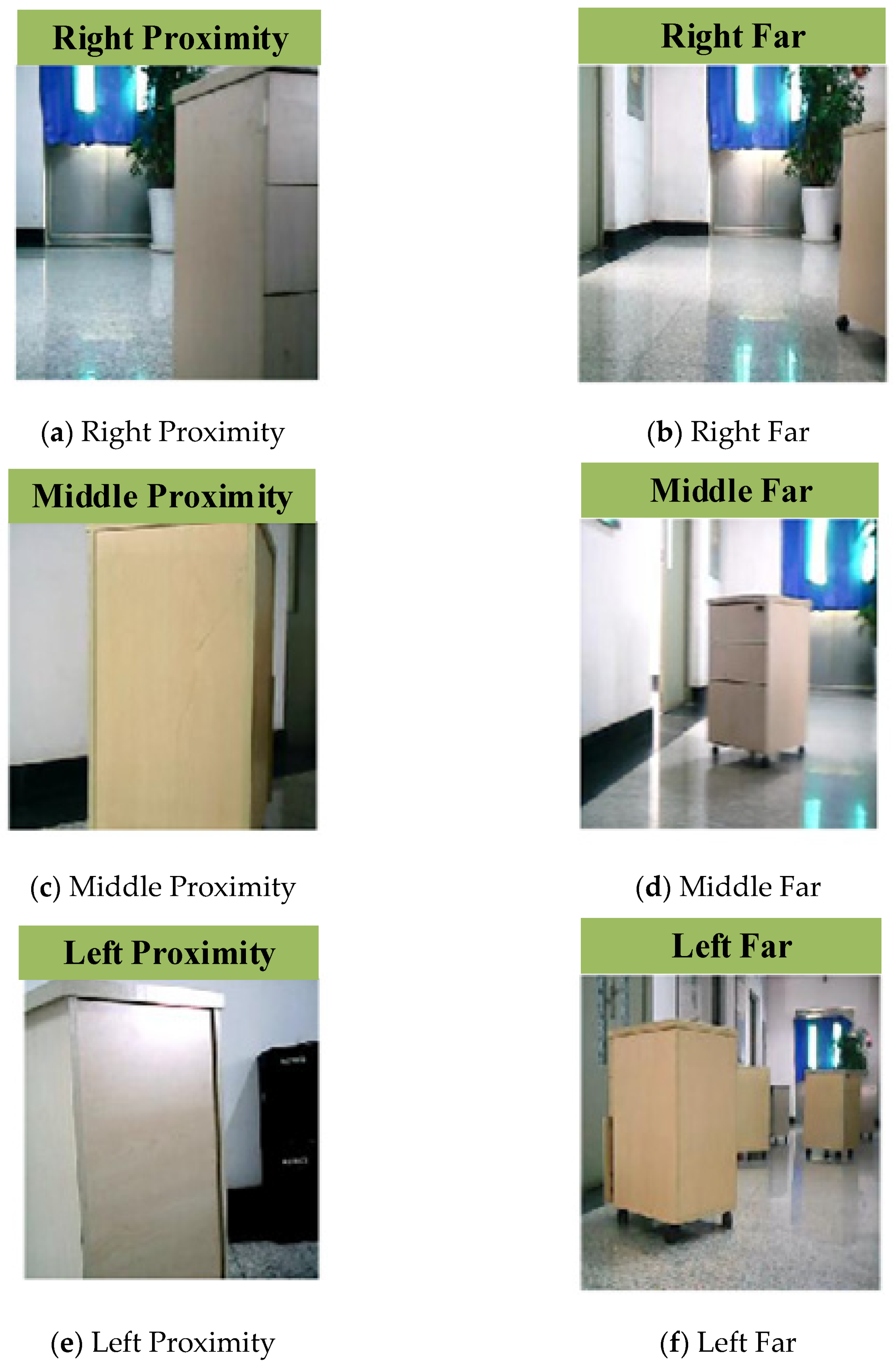
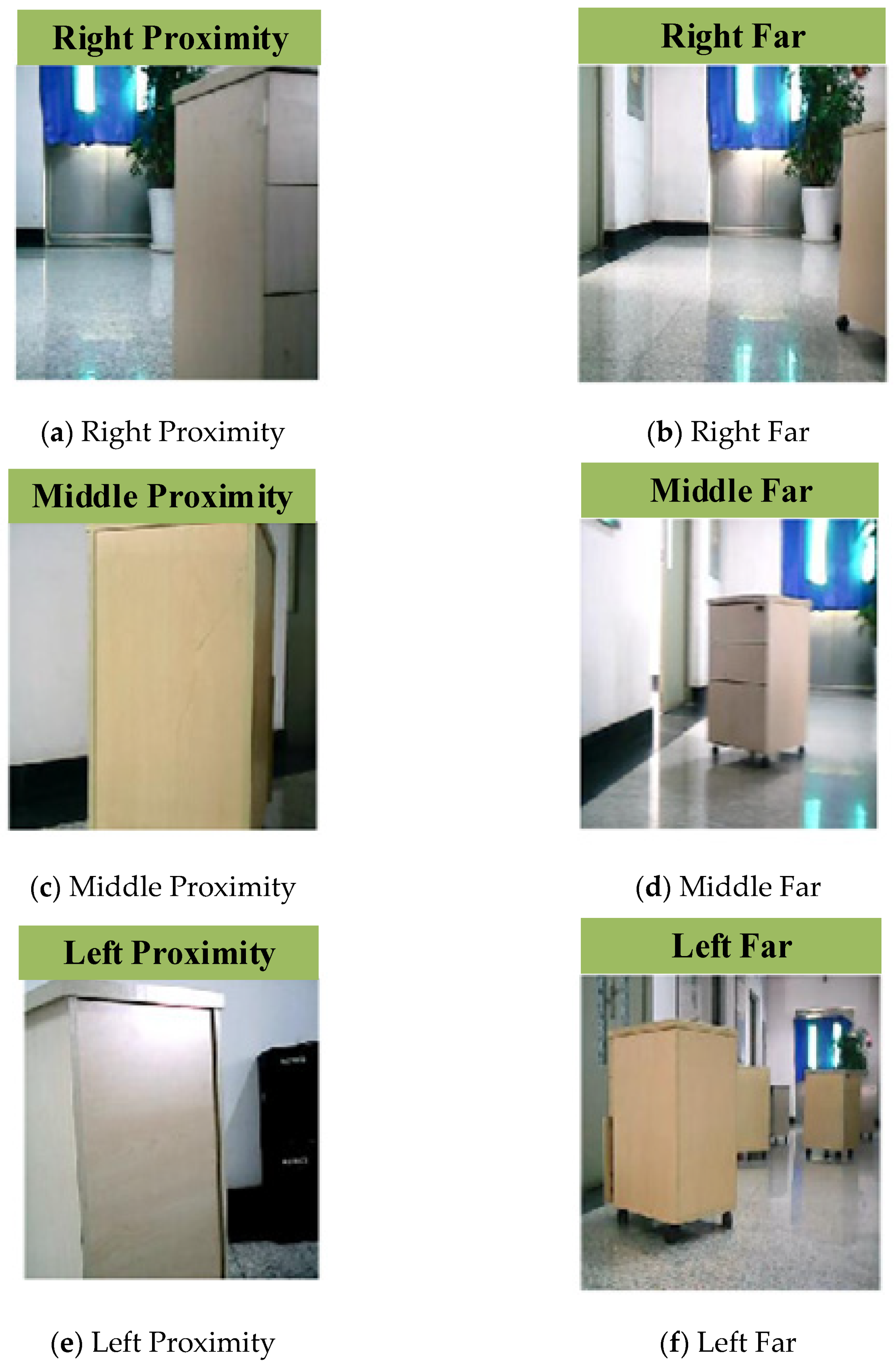
2.2. Data Set Acquisition
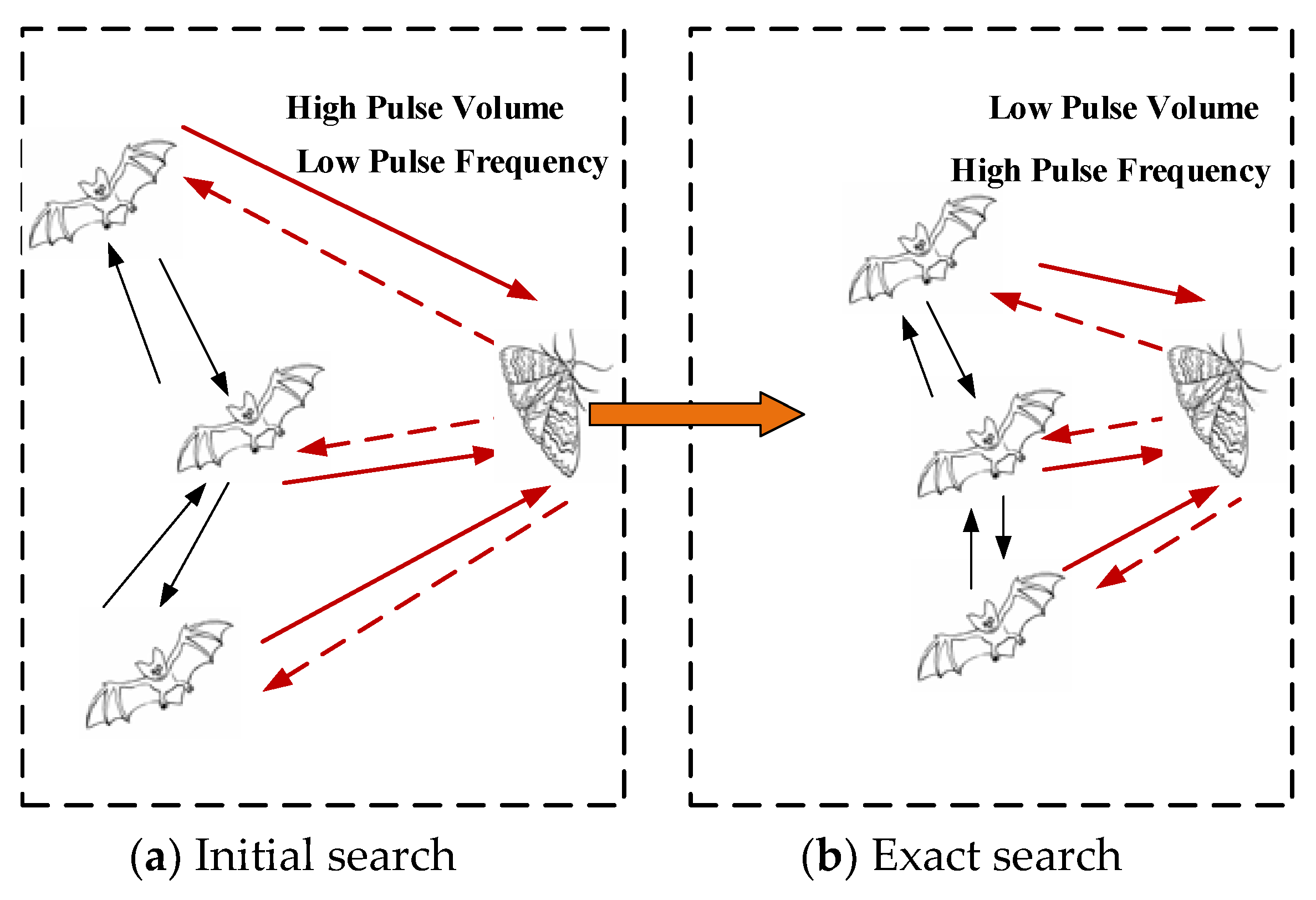
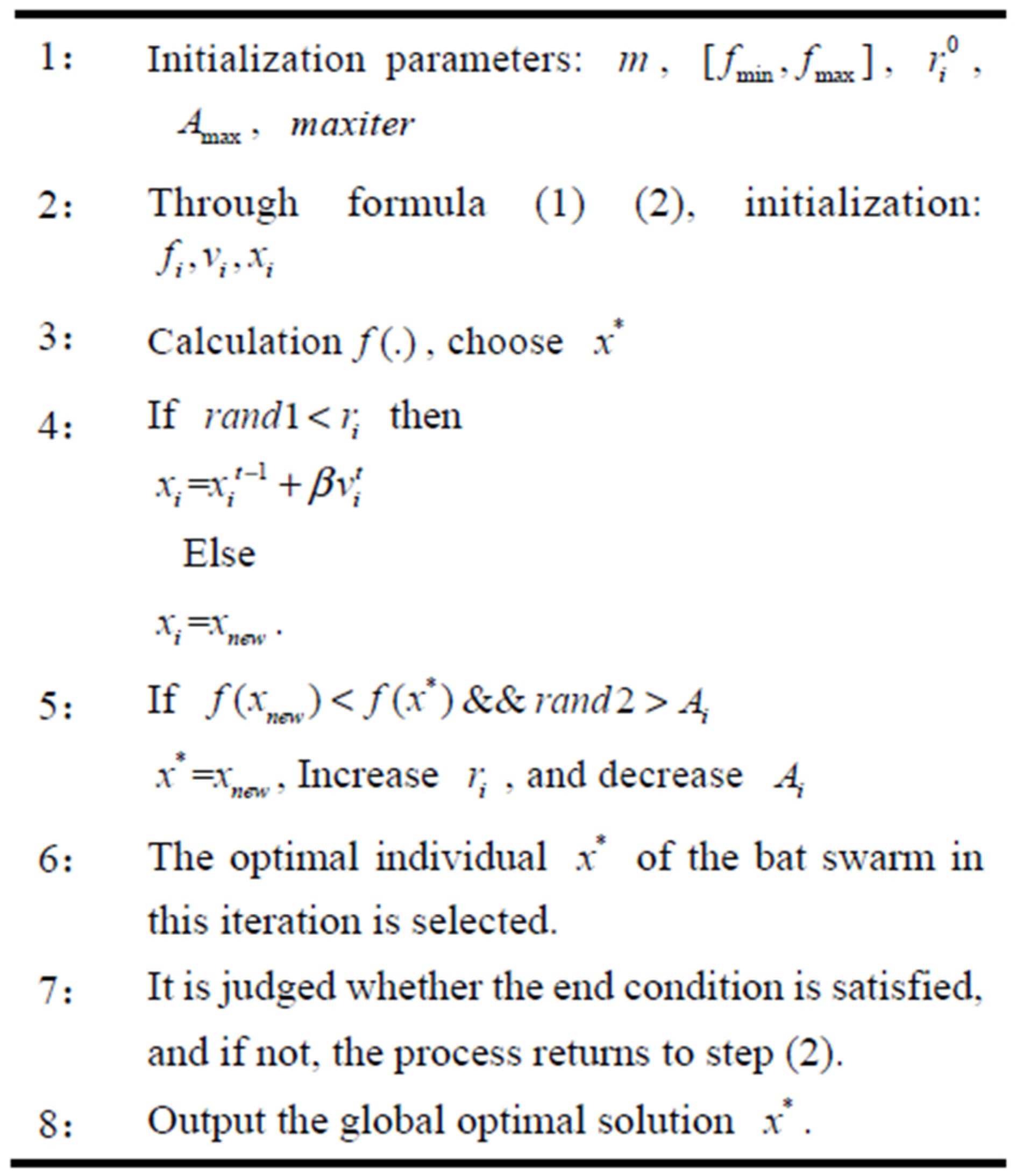
3. Bionic Optimization Neural Network
4. Neural Network Training and Experiments
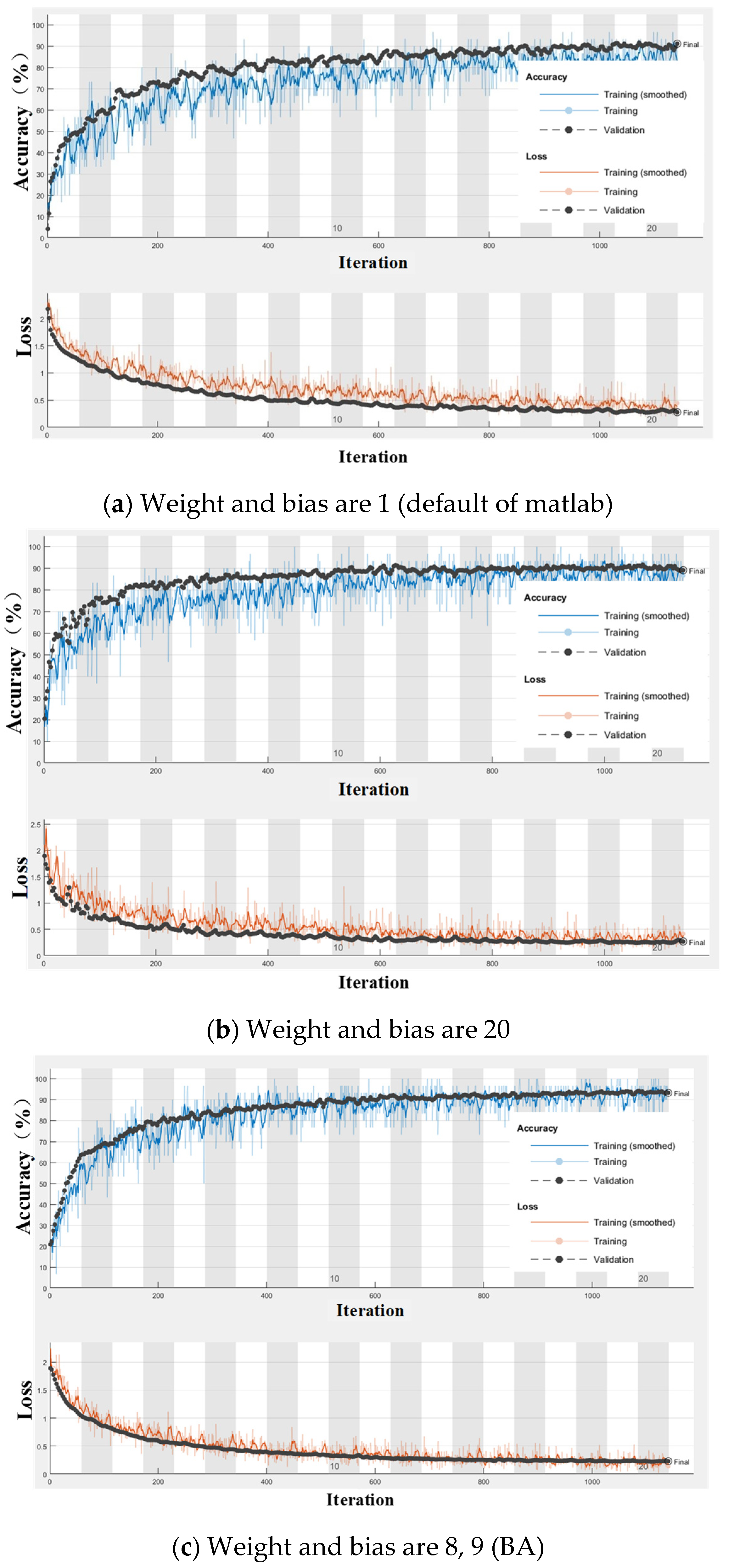
4.1. Neural Network Training
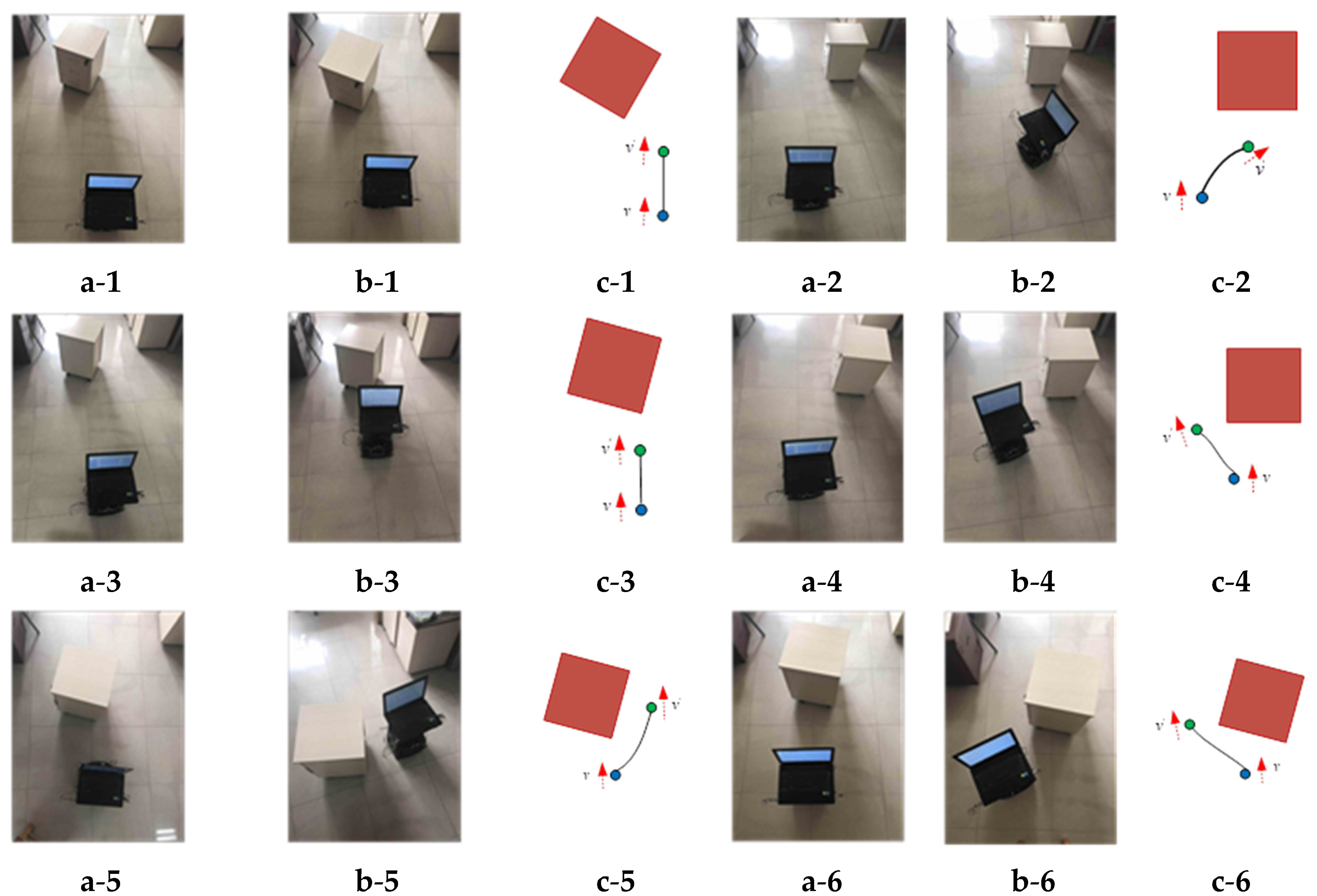
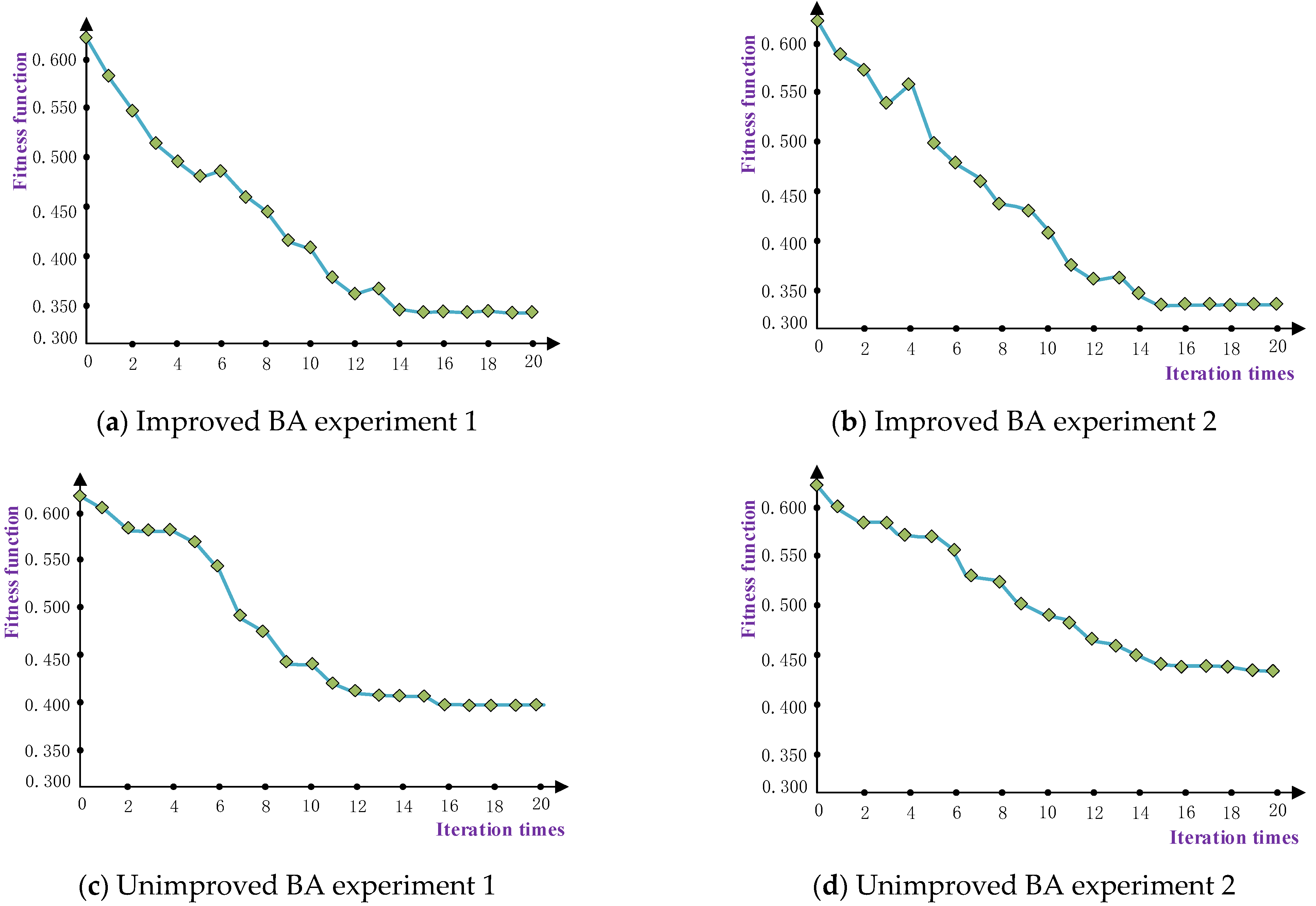
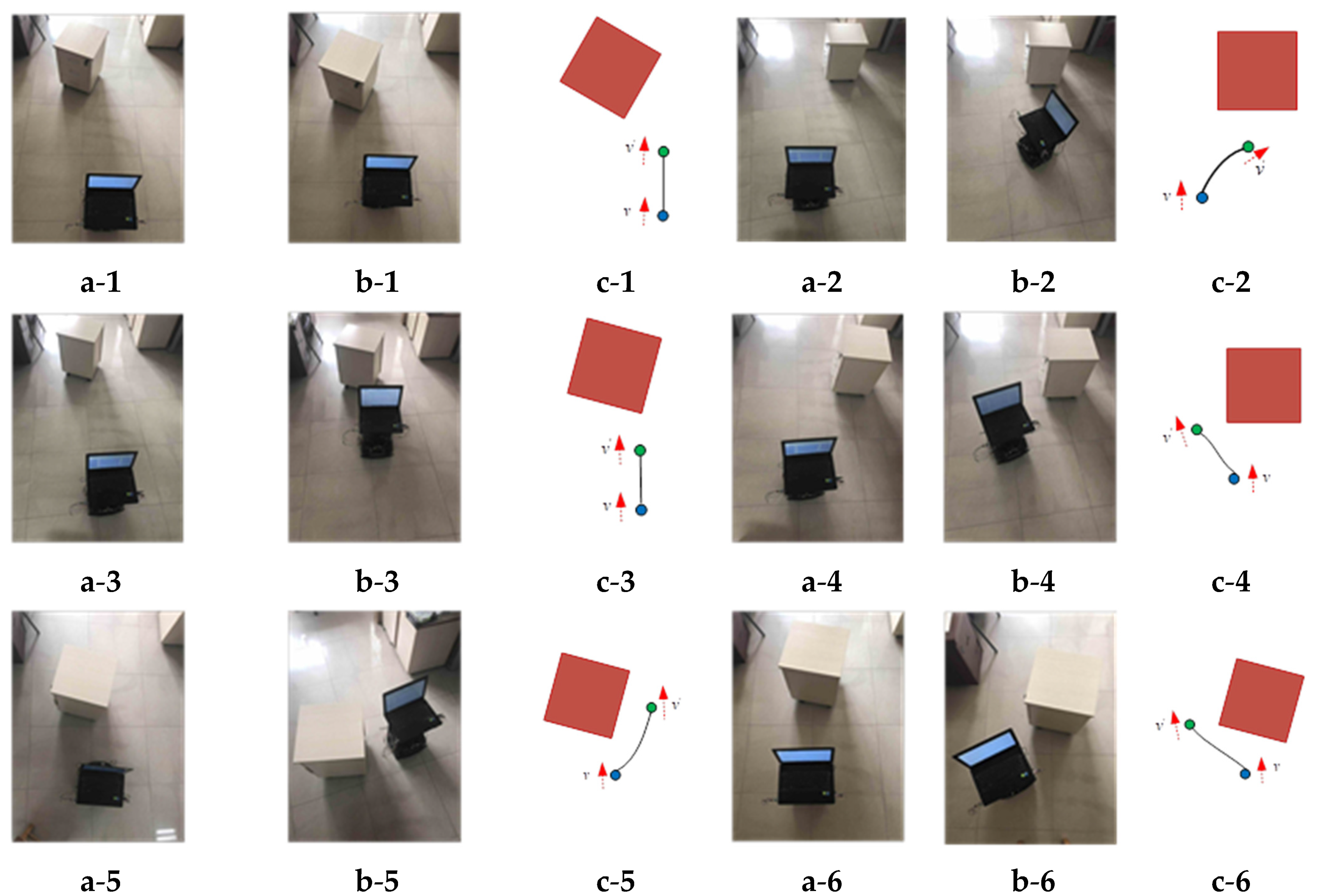
4.2. Experiments and Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Szrek, J.; Zimroz, R.; Wodecki, J.; Michalak, A.; Góralczyk, M.; Worsa-Kozak, M. Application of the Infrared Thermography and Unmanned Ground Vehicle for Rescue Action Support in Underground Mine—The AMICOS Project. Remote Sens. 2020, 13, 69. [Google Scholar] [CrossRef]
- Liu, Q.; Li, Z.; Yuan, S.; Zhu, Y.; Li, X. Review on Vehicle Detection Technology for Unmanned Ground Vehicles. Sensors 2021, 21, 1354. [Google Scholar] [CrossRef] [PubMed]
- Castaman, N.; Tosello, E.; Antonello, M.; Bagarello, N.; Gandin, S.; Carraro, M.; Munaro, M.; Bortoletto, R.; Ghidoni, S.; Menegatti, E.; et al. RUR53: An unmanned ground vehicle for navigation, recognition, and manipulation. Adv. Robot. 2021, 35, 1–18. [Google Scholar] [CrossRef]
- Wang, S.; Zhang, Z.; Cao, Y.; Liu, X.; Zhang, K.; Chen, J. An Obstacle Avoidance Method for Indoor Flaw Detection Unmanned Robot Based on Transfer Neural Network. Earth Space 2021, 2021, 484–493. [Google Scholar]
- Rajashekaraiah, G.; Sevil, H.E.; Dogan, A. PTEM based moving obstacle detection and avoidance for an unmanned ground vehicle. In Proceedings of the Dynamic Systems and Control Conference. Am. Soc. Mech. Eng. 2017, 58288, V002T21A009. [Google Scholar]
- Yang, W.; Ankit, G.; Rahul, S.; Heydari, M.; Desai, A.; Yang, H. Obstacle Avoidance Strategy and Implementation for Unmanned Ground Vehicle Using LIDAR. SAE Int. J. Commer. Veh. 2017, 10, 50–56. [Google Scholar]
- Bhave, U.; Showalter, G.D.; Anderson, D.J.; Roucco, C.; Hensley, A.C.; Lewin, G.C. Automating the Operation of a 3D-Printed Unmanned Ground Vehicle in Indoor Environments. In Proceedings of the 2019 Systems and Information Engineering Design Symposium (SIEDS), Charlottesville, VA, USA, 26 April 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–6. [Google Scholar]
- Khan, M.; Hassan, S.; Ahmed, S.I.; Iqbal, J. Stereovision-based real-time obstacle detection scheme for unmanned ground vehicle with steering wheel drive mechanism. In Proceedings of the 2017 International Conference on Communication, Computing and Digital Systems (C-CODE), Islamabad, Pakistan, 8–9 March 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 380–385. [Google Scholar]
- Levkovits-Scherer, D.S.; Cruz-Vega, I.; Martinez-Carranza, J. Real-time monocular vision-based UAV obstacle detection and collision avoidance in GPS-denied outdoor environments using CNN MobileNet-SSD. In Proceedings of the Mexican International Conference on Artificial Intelligence, Xalapa, Mexico, 27 October–2 November 2019; Springer: Cham, Switzerland, 2019; pp. 613–621. [Google Scholar]
- Yu, H.; Zhang, F.; Huang, P.; Wang, C.; Yuanhao, L. Autonomous Obstacle Avoidance for UAV based on Fusion of Radar and Monocular Camera. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24 October–24 January 2021; IEEE: Piscataway, NJ, USA, 2020; pp. 5954–5961. [Google Scholar]
- Eppenberger, T.; Cesari, G.; Dymczyk, M.; Siegwart, R.; Dube, R. Leveraging stereo-camera data for real-time dynamic obstacle detection and tracking. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24 October–24 January 2021; IEEE: Piscataway, NJ, USA, 2020; pp. 10528–10535. [Google Scholar]
- Lv, J.; Qu, C.; Du, S.; Zhao, X.; Yin, P.; Zhao, N.; Qu, S. Research on obstacle avoidance algorithm for unmanned ground vehicle based on multi-sensor information fusion. Math. Biosci. Eng. MBE 2021, 18, 1022–1039. [Google Scholar] [CrossRef] [PubMed]
- Hu, C.; Zhao, L.; Cao, L.; Tjan, P.; Wang, N. Steering control based on model predictive control for obstacle avoidance of unmanned ground vehicle. Meas. Control 2020, 53, 501–518. [Google Scholar] [CrossRef] [Green Version]
- Mohamed, A.; Ren, J.; Sharaf, A.M.; EI-Gindy, M. Optimal path planning for unmanned ground vehicles using potential field method and optimal control method. Int. J. Veh. Perform. 2018, 4, 1–14. [Google Scholar] [CrossRef]
- Chen, Y.; Bai, G.; Zhan, Y.; Hu, X.; Liu, J. Path Planning and Obstacle Avoiding of the USV Based on Improved ACO-APF Hybrid Algorithm with Adaptive Early-Warning. IEEE Access 2021, 9, 40728–40742. [Google Scholar] [CrossRef]
- Singla, A.; Padakandla, S.; Bhatnagar, S. Memory-Based Deep Reinforcement Learning for Obstacle Avoidance in UAV with Limited Environment Knowledge. IEEE Trans. Intell. Transp. Syst. 2021, 22, 107–118. [Google Scholar] [CrossRef]
- Wang, S.; Han, Y.; Chen, J.; Pan, Y.; Cao, Y.; Meng, H. A transfer-learning-based feature classification algorithm for UAV imagery in crop risk management. Desalination Water Treat. 2020, 181, 330–337. [Google Scholar] [CrossRef]
- Papakonstantinou, A.; Batsaris, M.; Spondylidis, S.; Topouzelis, K. A Citizen Science Unmanned Aerial System Data Acquisition Protocol and Deep Learning Techniques for the Automatic Detection and Mapping of Marine Litter Concentrations in the Coastal Zone. Drones 2021, 5, 6. [Google Scholar] [CrossRef]
- Meena, S.D.; Agilandeeswari, L. Smart Animal Detection and Counting Framework for Monitoring Livestock in an Autonomous Unmanned Ground Vehicle Using Restricted Supervised Learning and Image Fusion. Neural Process. Lett. 2021, 53, 1253–1285. [Google Scholar] [CrossRef]
- Yang, X.S. A New Metaheuristic Bat-Inspired Algorithm. Comput. Knowl. Technol. 2010, 284, 65–74. [Google Scholar]
- Trieu, H.T.; Nguyen, H.T.; Willey, K. Shared control strategies for obstacle avoidance tasks in an intelligent wheelchair. In Proceedings of the 2008 30th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Vancouver, BC, Canada, 20–24 August 2008; IEEE: Piscataway, NJ, USA, 2008; pp. 4254–4257. [Google Scholar]
- Wang, C.; Savkin, A.V.; Clout, R.; Nguyen, H.T. An intelligent robotic hospital bed for safe transportation of critical neurosurgery patients along crowded hospital corridors. IEEE Trans. Neural Syst. Rehabil. Eng. 2014, 23, 744–754. [Google Scholar] [CrossRef] [PubMed]
- Ruíz-Serrano, A.; Reyes-Fernández, M.C.; Posada-Gómez, R.; Martínez-Sibaja, A.; Aguilar-Lasserre, A.A. Obstacle avoidance embedded system for a smart wheelchair with a multimodal navigation interface. In Proceedings of the 2014 11th International Conference on Electrical Engineering, Computing Science and Automatic Control (CCE), Ciudad del Carmen, Mexico, 29 September–3 October 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 1–6. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Pixel | Resolution |
|---|---|---|
| AONI-ANC | 1.3 million | 640 × 480 |
| Subject | Left Proximity | Left Far | Middle Proximity | Middle Far | Right Proximity | Right Far |
|---|---|---|---|---|---|---|
| Train | 313 | 418 | 166 | 561 | 369 | 407 |
| Test | 63 | 83 | 33 | 112 | 74 | 81 |
| Lable | 100000 | 010000 | 001000 | 000100 | 000010 | 000001 |
| Subject | ||||||
|---|---|---|---|---|---|---|
| Parameter | 20 | 30 | −1 | 1 | 0.85 | 0.1 |
| Subject | Improved BA Algorithm | |
|---|---|---|
| WeightlearnRateFactor | BiasLearnratefacto | |
| Experiment 1 | 10.2354 | 7.6387 |
| Experiment 2 | 6.3334 | 9.4124 |
| Average | 8 | 9 |
| Subject | Default | Manual Setting | BA | HOG+SVM |
|---|---|---|---|---|
| Accuracy | 88.12% | 89.01% | 94.84% | 75.11% |
| The Output of Neural Network | Right Proximity | Left Proximity | Middle Proximity | Right Far | Left Far | Middle Far |
|---|---|---|---|---|---|---|
| Movement rules | Turn left | Turn right | Turn left | Go straight | Go straight | Go straight |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, S.; Wang, L.; He, X.; Cao, Y. A Monocular Vision Obstacle Avoidance Method Applied to Indoor Tracking Robot. Drones 2021, 5, 105. https://doi.org/10.3390/drones5040105
Wang S, Wang L, He X, Cao Y. A Monocular Vision Obstacle Avoidance Method Applied to Indoor Tracking Robot. Drones. 2021; 5(4):105. https://doi.org/10.3390/drones5040105
Chicago/Turabian StyleWang, Shubo, Ling Wang, Xiongkui He, and Yi Cao. 2021. "A Monocular Vision Obstacle Avoidance Method Applied to Indoor Tracking Robot" Drones 5, no. 4: 105. https://doi.org/10.3390/drones5040105
APA StyleWang, S., Wang, L., He, X., & Cao, Y. (2021). A Monocular Vision Obstacle Avoidance Method Applied to Indoor Tracking Robot. Drones, 5(4), 105. https://doi.org/10.3390/drones5040105