2.1. Energy Balance
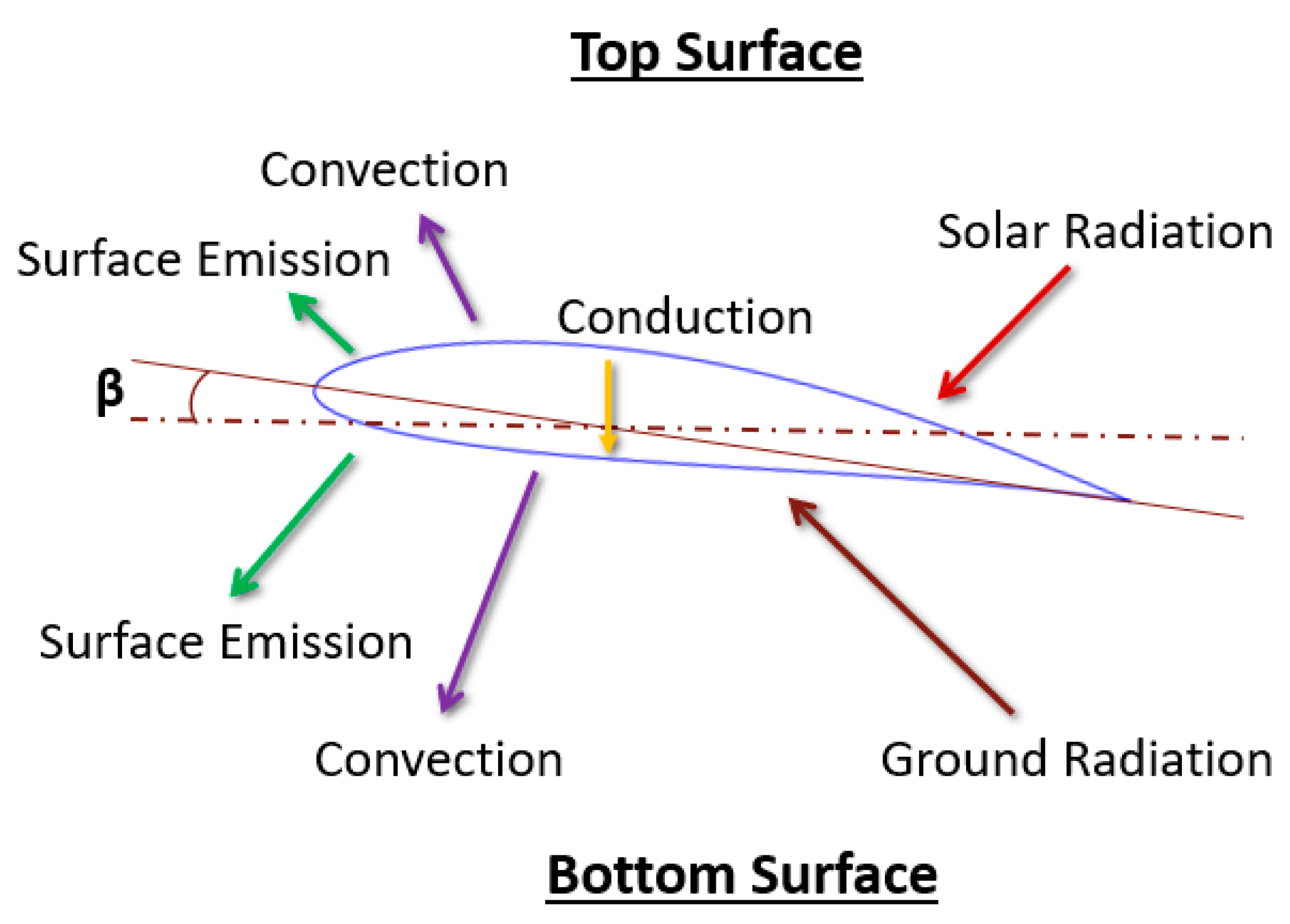
To understand the thermal effects of different wing colors, a thermal analysis is performed using an energy balance and including the influences of solar energy absorption, convection heat loss, and radiative heat loss. The energy balance on a drone fixed wing can be expressed as:
The various sources of energy acting on the wing can be seen in
Figure 1. The absorbed solar radiation is balanced by the convective, radiative and conductive transfer. Determining the various fluxes in the energy balance requires information from the Martian atmosphere. In this study, the ambient temperature, pressure, wind speed, and other atmospheric properties are obtained from the dataset collected by Viking Lander 1 and the entry probe (VL1), which is located at 22.37 N latitude and 47.97 W longitude on the surface of Mars [
31].
The top and the bottom wing surfaces experience different heat fluxes, which can be determined by the view factors, surface temperatures, surface absorptance, and surface emissivity. The total energy balance equations for both the top and the bottom surfaces of the wing are given in Equations (2) and (3), respectively [
32].
In the energy balance equations, the meanings of the different symbols are detailed in the nomenclature, using subscripts t and b to denote top and bottom wing surface, respectively. The convective heat transfer coefficient, denoted h is obtained from calculating the Nusselt Number on a flat plate in laminar regime as detailed in [
33] using Mars atmospheric properties and assuming that the dominant gas is
. These properties were obtained from [
34]. The atmospheric density was determined by using ideal gas law at 8.5 mbar of atmospheric pressure.
2.3. Solar Energy Absorption
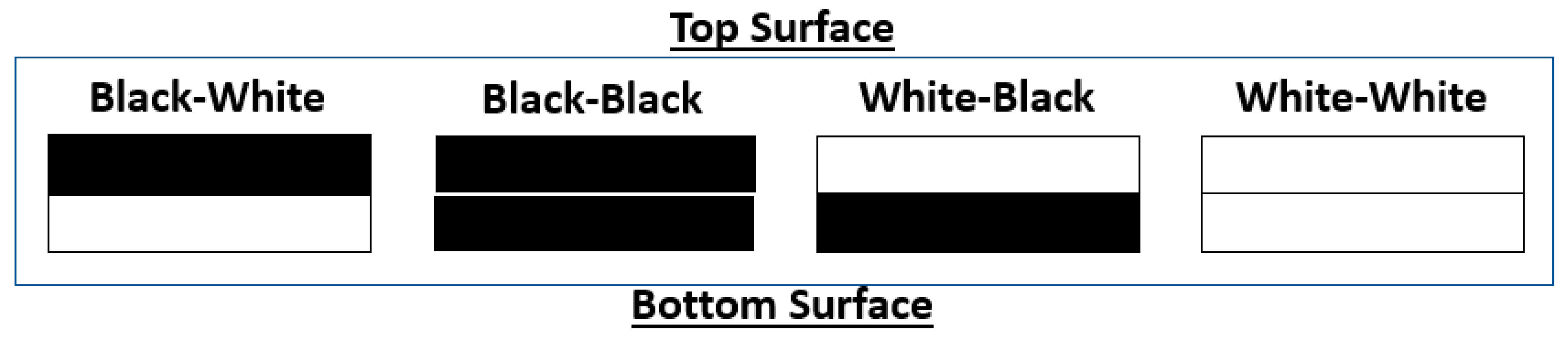
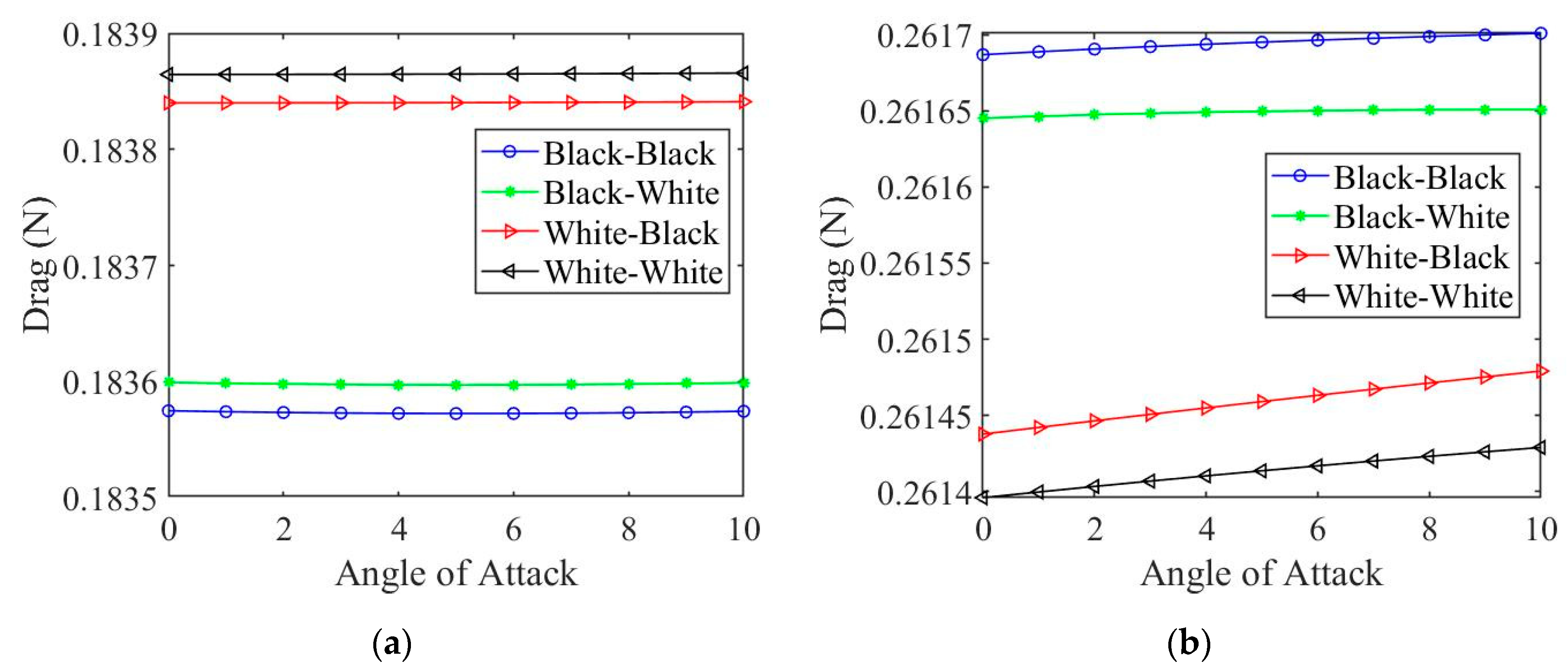
Being inspired by migrating birds’ flight on Earth, different color combinations are investigated. It is assumed that the top and bottom surfaces have different colors and therefore different absorptivity values. The different color configurations considered during this study are shown in
Figure 4. The four configurations are on the top and bottom surfaces, respectively, black–white, black–black, white–black, and white–white. The solar irradiance that acts on the top surface of the wings includes direct beam, diffuse, and albedo radiations. The wing surface exposure to different radiation fluxes is governed by the view factors to the sky and the ground. The absorbed energy on the two wing surfaces can be written as [
32]:
The view factors for the top and bottom surfaces are needed and are expressed by Equations (6)–(9), where
is the angle of attack. The view factor for the top surface to the sky is
while the view factor for the top surface to the ground is
. For the bottom surface, the view factor for the bottom to the sky
is identical to
. Likewise, the view factor from the bottom surface to the ground
is identical to
. In this case, the drone is considered to be flying very close to the ground because some of the atmospheric properties used were measured by VL1 at ground level. It is noted that at a zero-degree angle of attack Equations (2) and (3) are decoupled because the view factor from the top surface to the sky is 1 and the view factor for the top surface to the ground is zero.
The absorptivity values for
and
used in this study are 0.88 and 0.23, which correspond to the absorptance of anodize black paint and biphenyl white solid paint, respectively. Both are often used for space applications [
35]. Depending on several variables, such as the solar angle of incidence shown in
Figure 5, the optical depth of the Martian atmosphere, and the season, the solar irradiance changes. NASA researchers from Lewis Research Center in Ohio have derived a set of equations to determine the solar irradiance on Mars [
36]. One of the most crucial elements for determining the solar irradiance is the position of the wing with respect to the sun. The solar incidence angle
is used to describe this relation and can be determined from Equation (10), as follows [
37]:
To determine the solar incidence angle, positional information about the drone must be known, such as the latitude
, declination angle
, hour angle
, angle of attack
, and the wing azimuth angle
. The wing azimuth angle can be considered as the direction of flight. In this study, the drone is assumed to be flying directly southward. The hour angle only considers daylight hours from 7:00 to 17:00. Additionally, the hour angle refers to solar Martian time (0:00–24:00). The declination angle depends on the season which is described by the areocentric longitude
. The latitude selected for the study is the location of the rover which is where the atmospheric properties are obtained. The values for latitude, declination angle, tilt angle, and wing azimuth angle that are used in this study are shown in
Table 1 for both summer and winter seasons.
After determining the solar incidence angle, the solar irradiance can then be determined. The direct beam irradiance
, diffuse irradiance on a horizontal surface
, and the global irradiance on a horizontal surface
which are used to determine the beam, diffuse, and albedo irradiance, respectively, can be determined from Equations (11)–(13) [
36]. The optical depth
varies depending on the date which is represented by the areocentric longitude
. The optical depth is a result of the atmospheric dust particles in the atmosphere [
38]. The values for the solar irradiance variables that are used for this study are shown in
Table 2. The normalized net flux function
values [
36] used during this study that correspond to the solar incidence angle and optical depth are presented in
Table 3.
The solar irradiance at the top of the atmosphere
, which can be seen in Equation (14) [
36], is needed along with the optical depth
, solar incidence angle
, and the normalized net flux function
to determine the direct beam irradiance and the global irradiance. Mars eccentricity
is around 0.093377, as can be seen in
Table 2. The diffuse irradiance can be determined by subtracting the direct beam irradiance on a horizontal surface
from the global irradiance on a horizontal surface
. The equation for direct beam irradiance on a horizontal surface can be expressed as shown in Equation (15) [
36].
2.5. Thermal Boundary Layer Analysis
For simplicity, the wing curvature is ignored, and a flat plate is considered for the boundary layer analysis.
Figure 6 represents a schematic view of the boundary layer over a flat plat [
25].
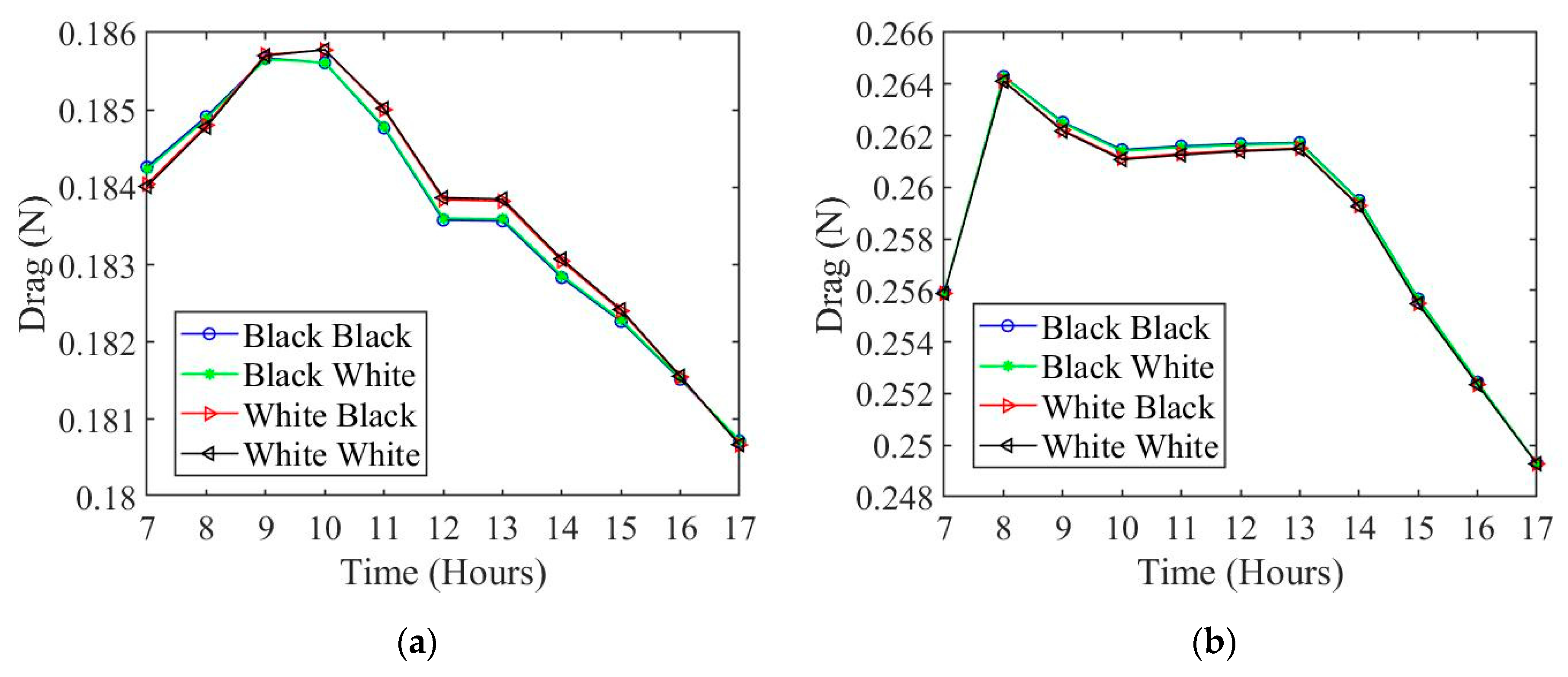
The thermal boundary layer effects on the skin friction drag are determined using Equation (18) [
39], where the wingspan
, is 3.5 m and the chord length,
, is 0.22 m [
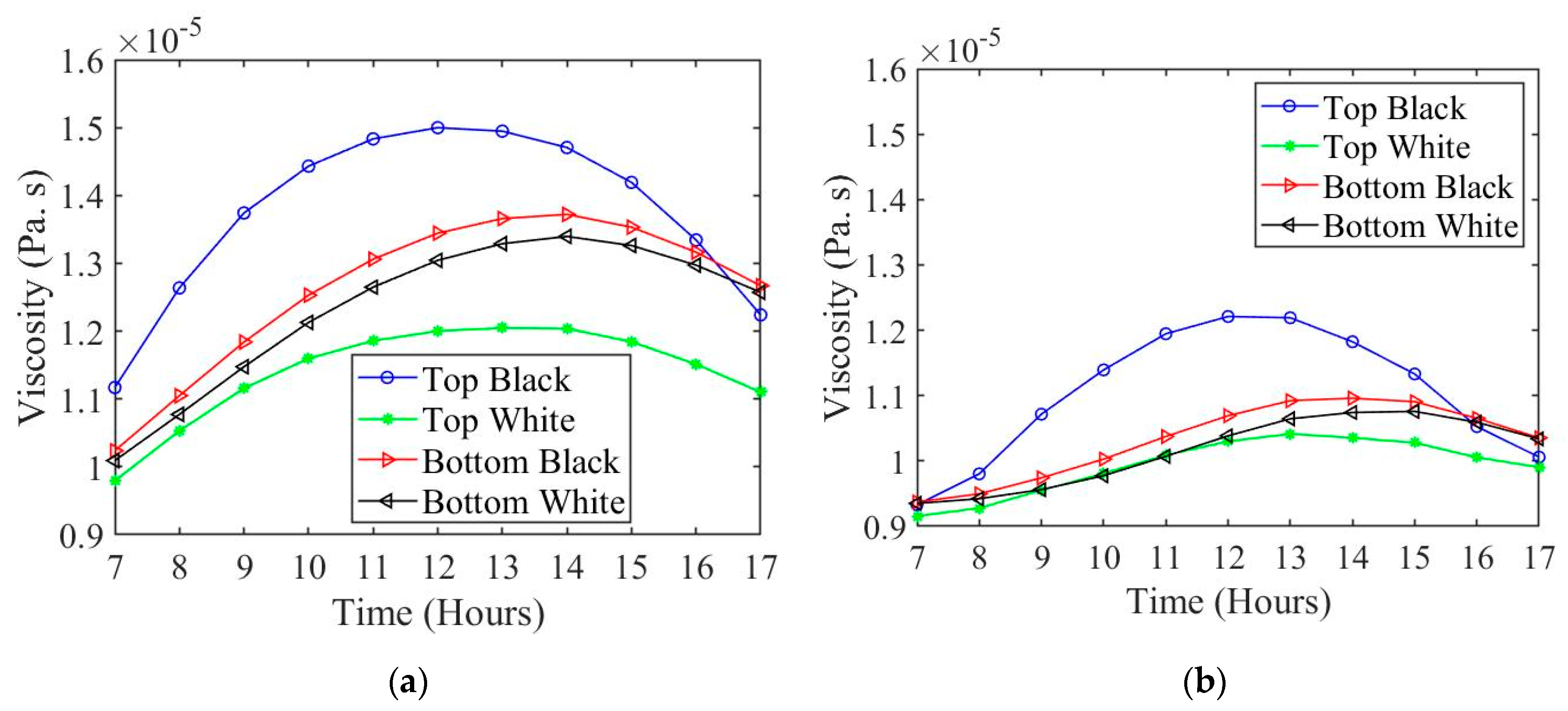
7]. To determine the viscosity
, Sutherland’s formula, which can be found in Equation (19), is used [
40].
are the reference temperature and viscosity, respectively, which are 293.14 K and
for the Martian atmosphere [
41]. The Sutherland constant C, for
is 240 K [
41] and
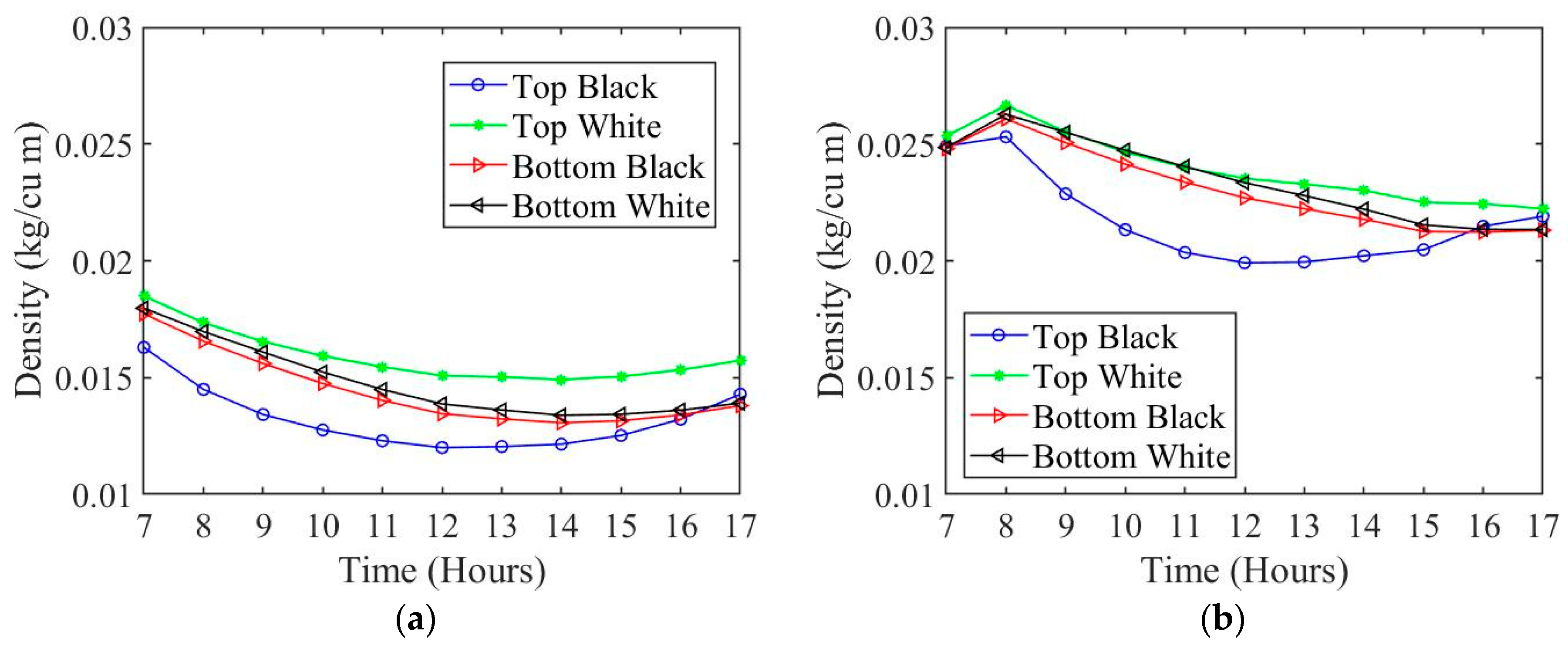
is the wing surface temperature. The density
is determined using ideal gas law considering
in Equation (20). The ideal gas constant for the Martian atmosphere
, is
[
30]. The pressure P is found from the information collected by VL1.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}