Temperature Profiling of Waterbodies with a UAV-Integrated Sensor Subsystem




Abstract
1. Introduction
2. Materials and Methods
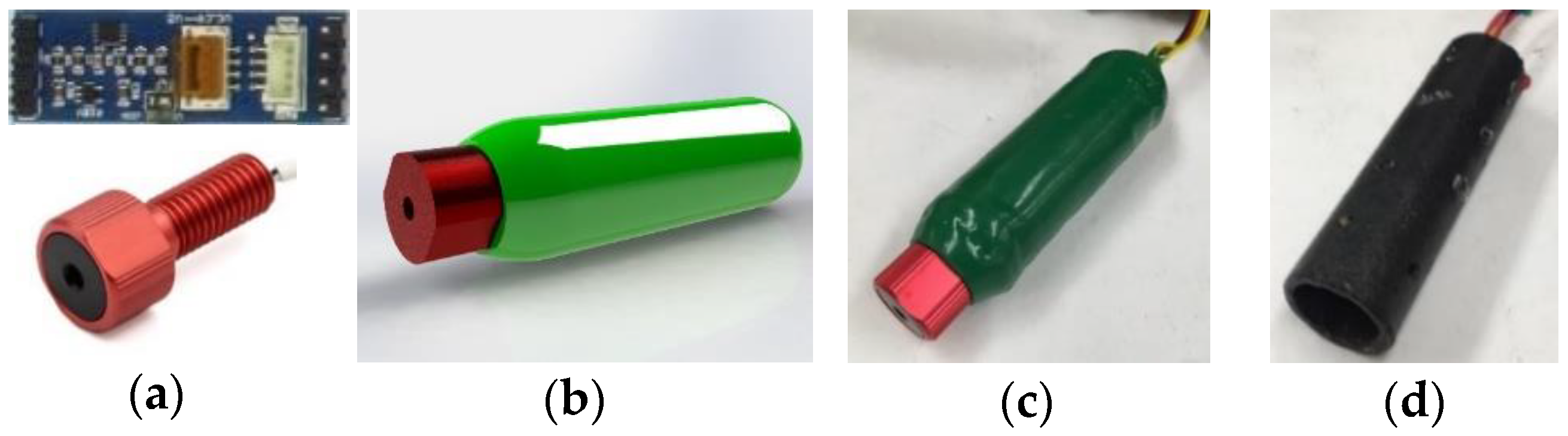
2.1. UAV and Sensor Node Components
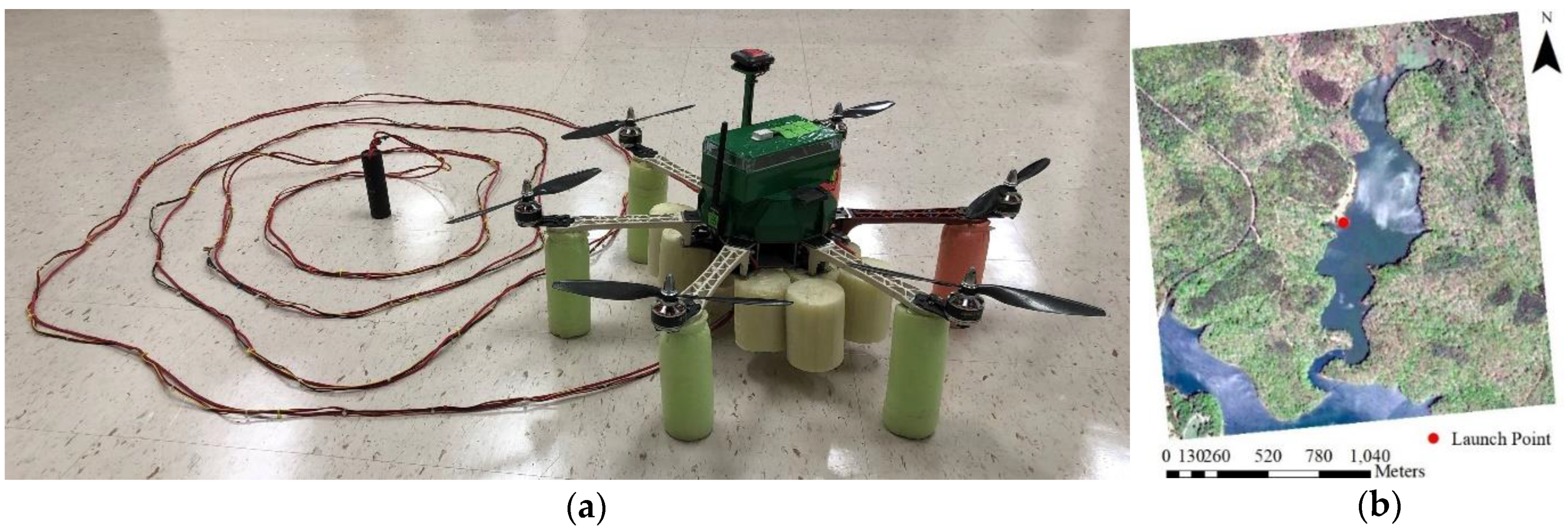
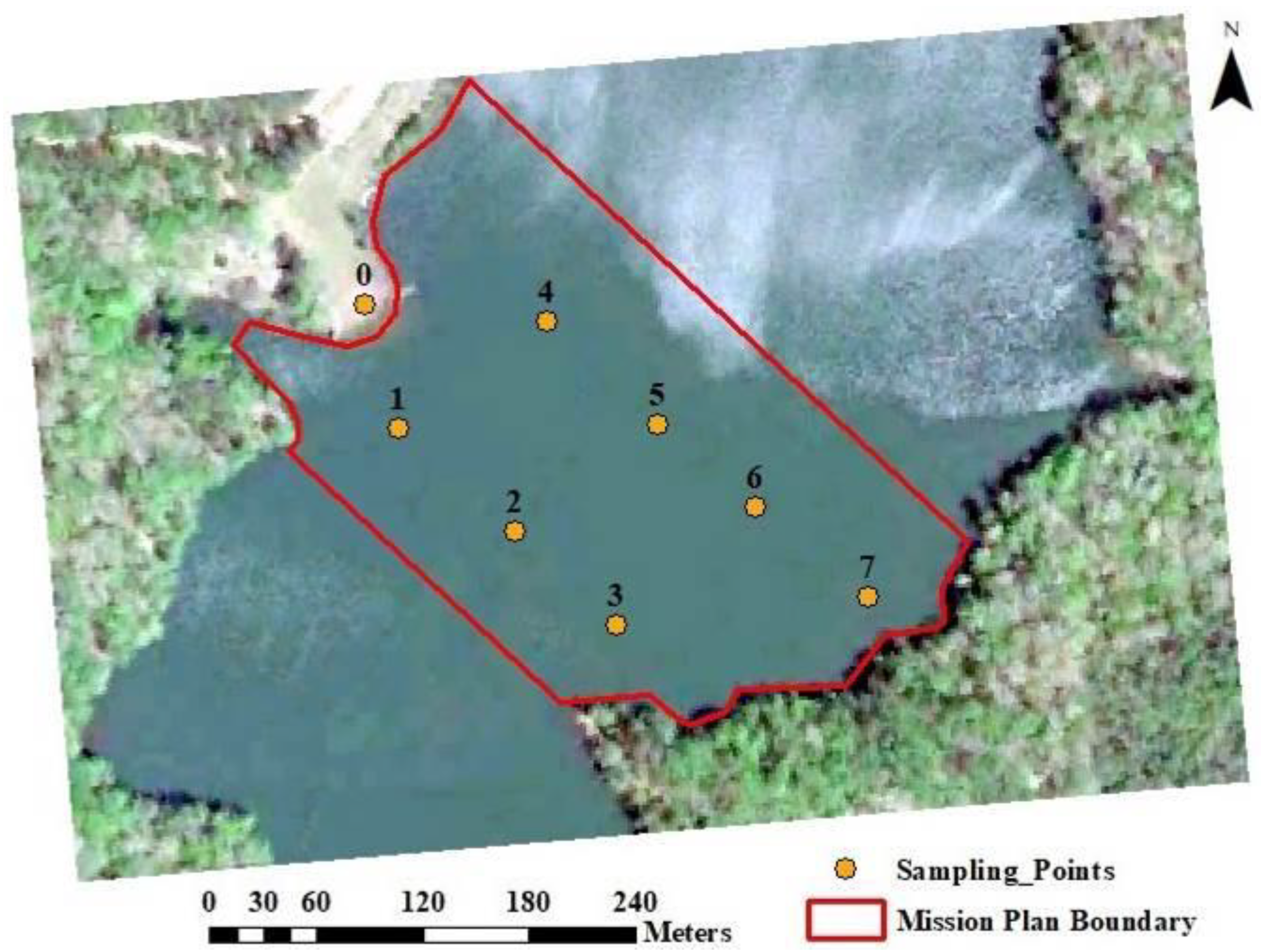
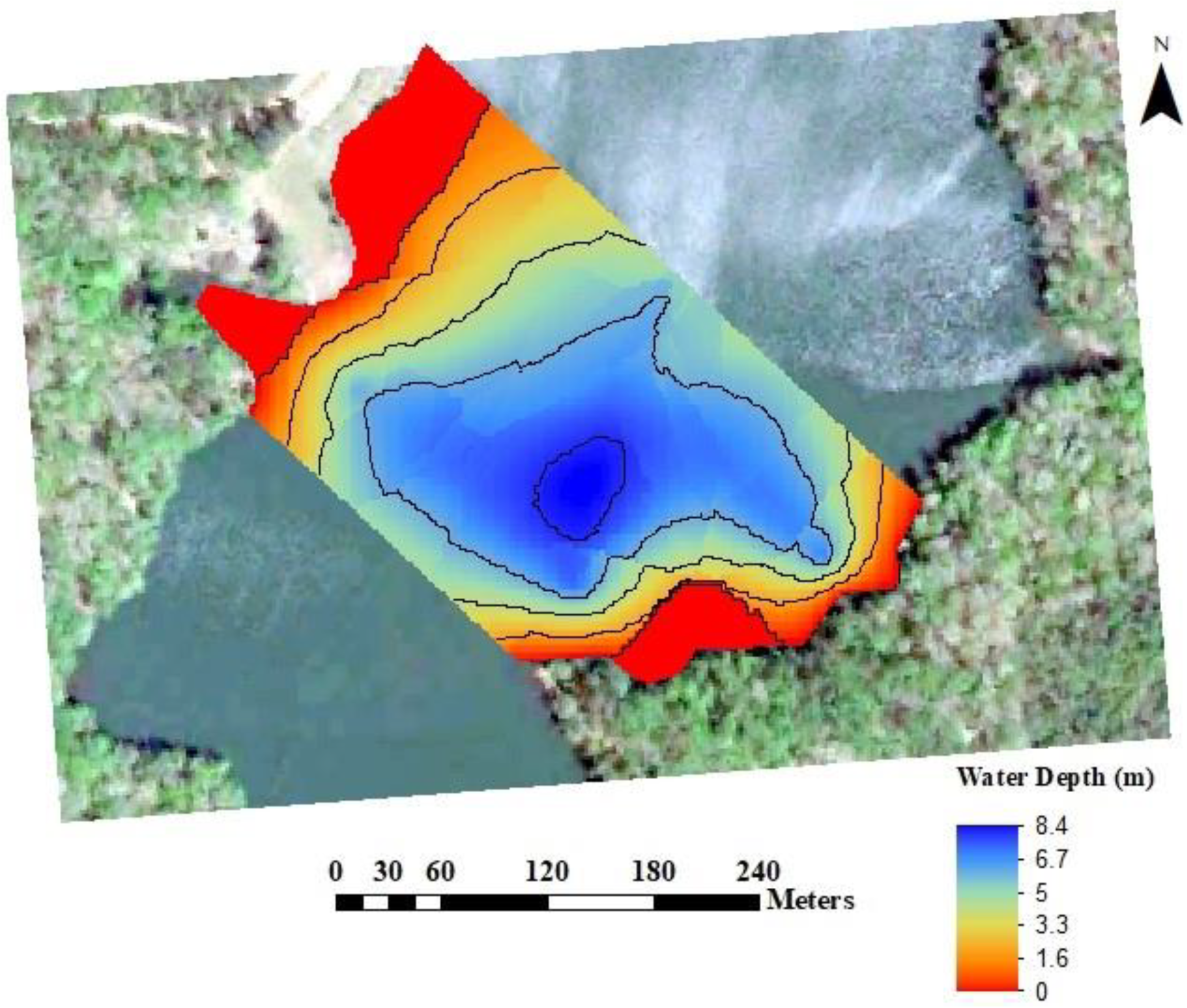
2.2. Experiment Site and Sampling Locations
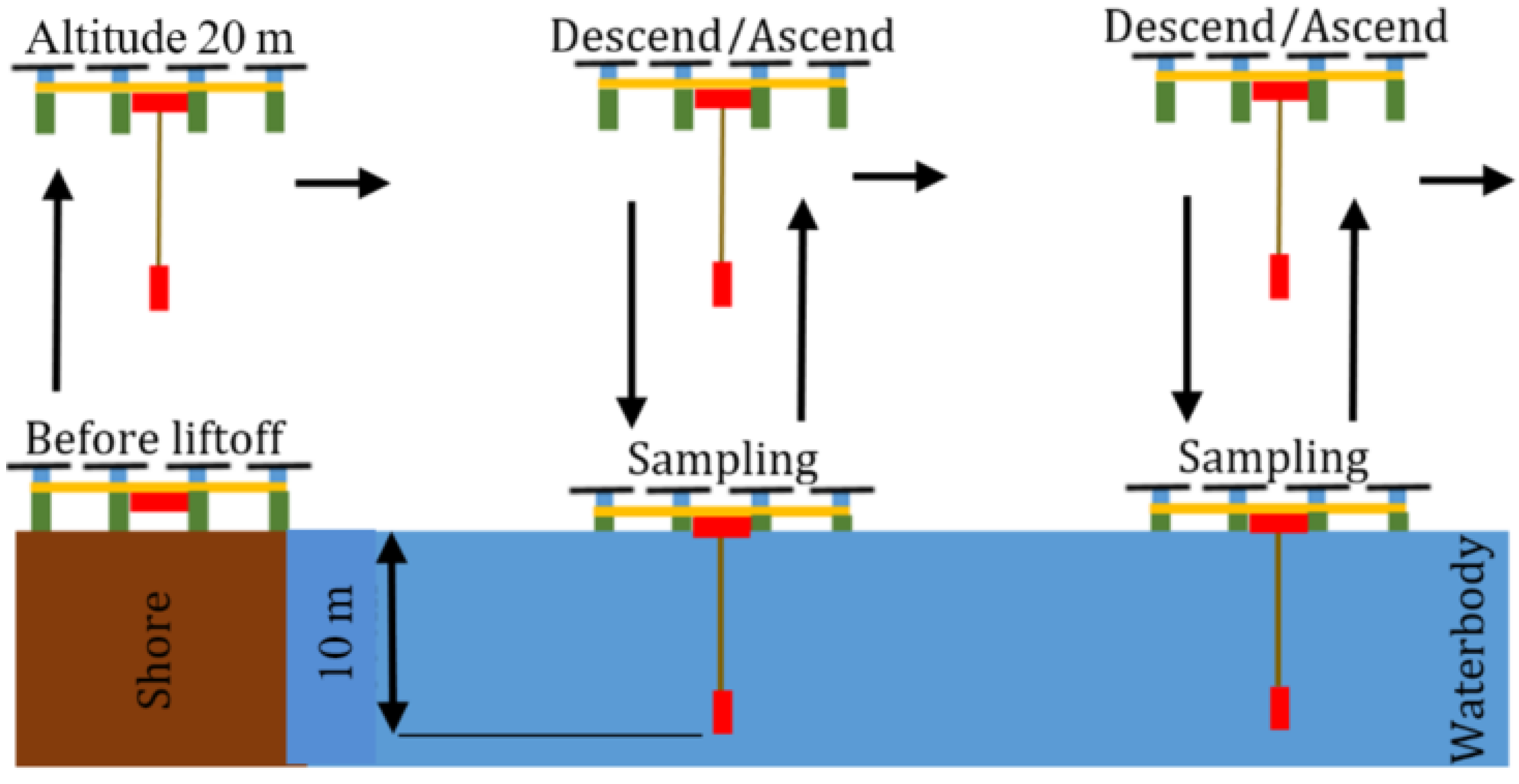
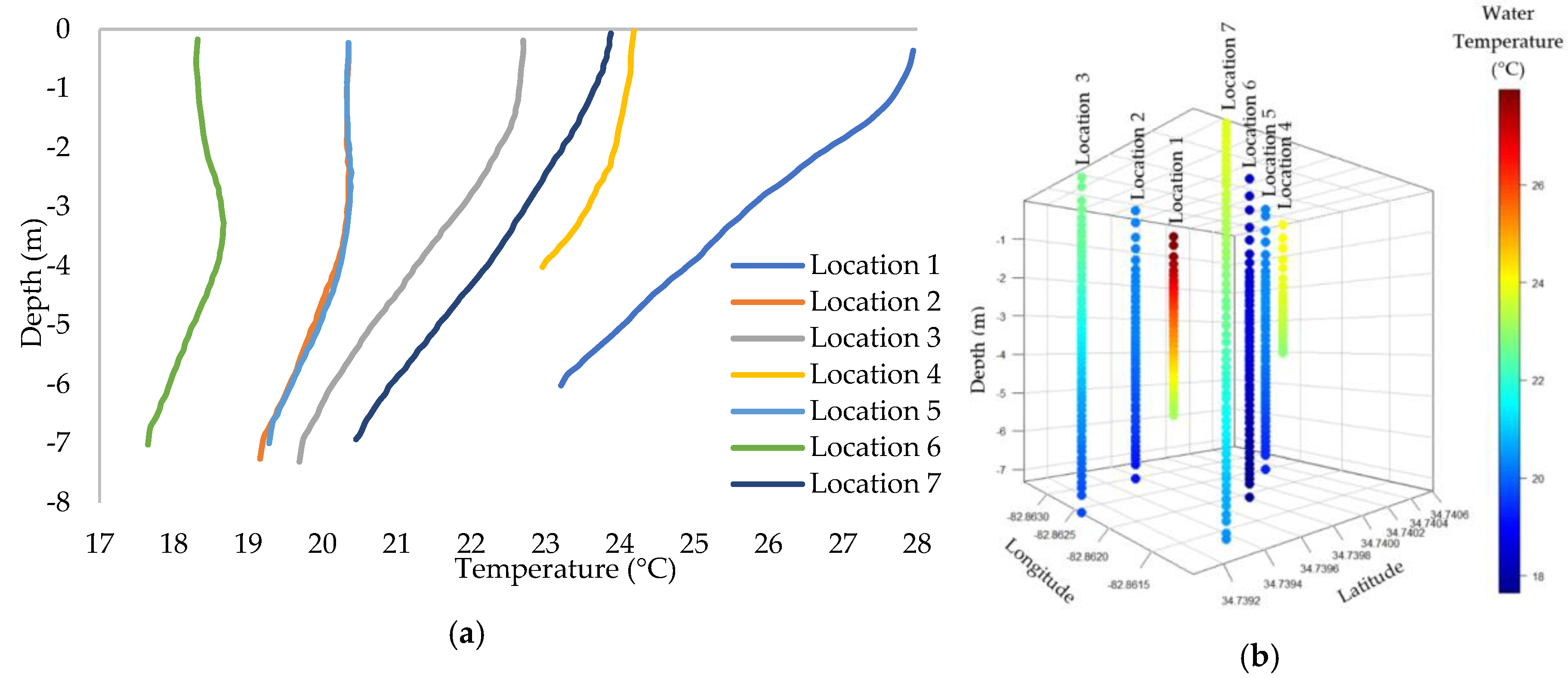
2.3. Water Temperature Profiling Data Collection
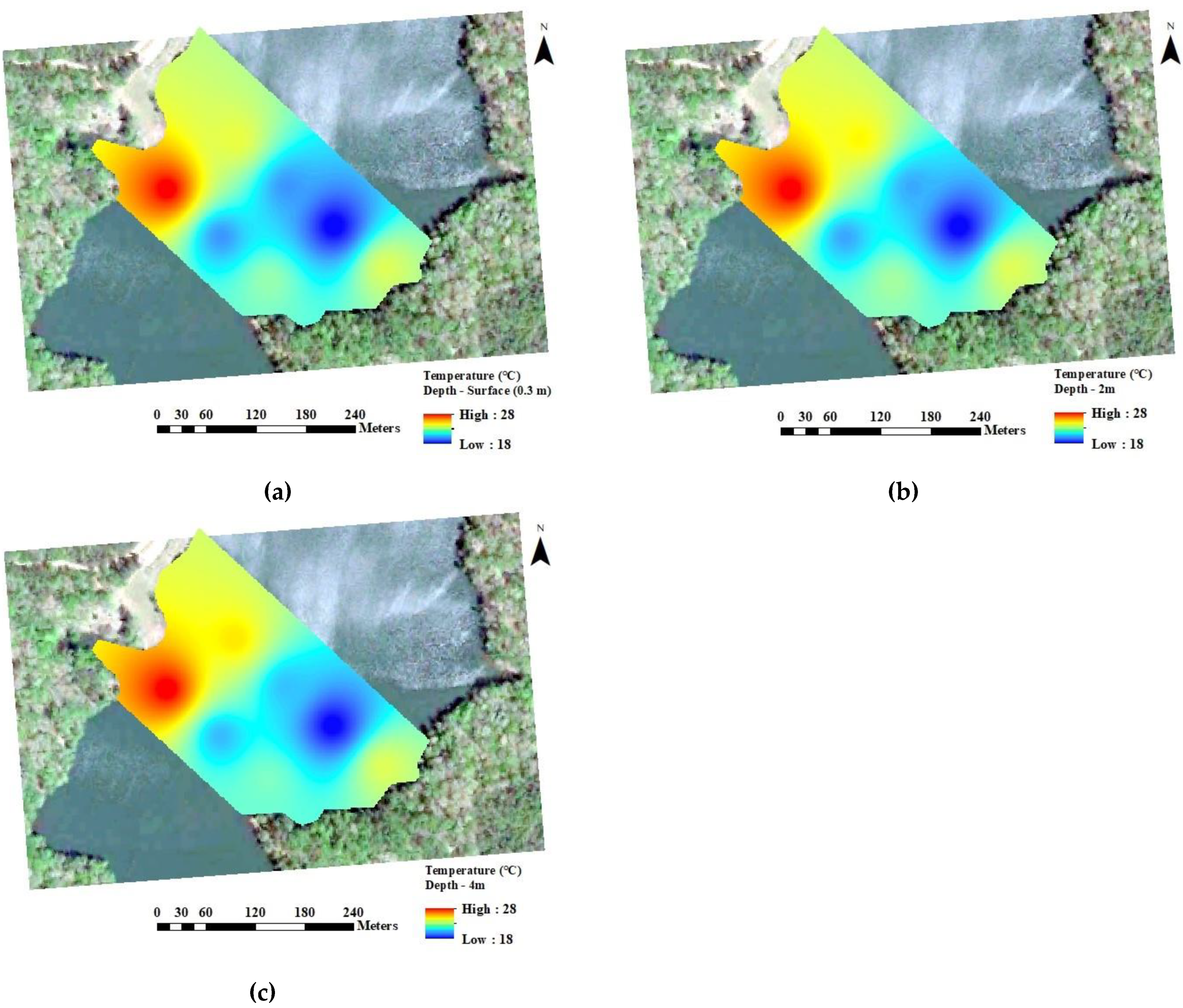
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Li, D.; Liu, S. (Eds.) Chapter 8—Water Quality Detection for Lakes. In Water Quality Monitoring and Management; Academic Press: Cambridge, MA, USA, 2019; pp. 221–231. [Google Scholar] [CrossRef]
- Boehrer, B.; Schultze, M. Stratification of lakes. Rev. Geophys. 2008, 46. [Google Scholar] [CrossRef]
- Foley, B.; Jones, I.A.N.; Maberly, S.; Rippey, B. Long-term changes in oxygen depletion in a small temperate lake: Effects of climate change and eutrophication. Freshw. Biol. 2011, 57, 278–289. [Google Scholar] [CrossRef]
- Wang, J.; Huang, L.; Ju, J.; Daut, G.; Ma, Q.; Zhu, L.; Haberzettl, T.; Baade, J.; Mäusbacher, R.; Hamilton, A.; et al. Seasonal stratification of a deep, high-altitude, dimictic lake: Nam Co, Tibetan Plateau. J. Hydrol. 2020, 584, 124668. [Google Scholar] [CrossRef]
- Liu, M.; Zhang, Y.; Shi, K.; Zhu, G.; Wu, Z.; Liu, M.; Zhang, Y. Thermal stratification dynamics in a large and deep subtropical reservoir revealed by high-frequency buoy data. Sci. Total Environ. 2019, 651, 614–624. [Google Scholar] [CrossRef]
- Kurtuluş, T.; Kurtuluş, B.; Avşar, Ö.; Avşar, U. Evaluating the thermal stratification of Köyceğiz Lake (SW Turkey) using in-situ and remote sensing observations. J. Afr. Earth Sci. 2019, 158, 103559. [Google Scholar] [CrossRef]
- Rucinski, D.K.; Beletsky, D.; DePinto, J.V.; Schwab, D.J.; Scavia, D. A simple 1-dimensional, climate based dissolved oxygen model for the central basin of Lake Erie. J. Great Lakes Res. 2010, 36, 465–476. [Google Scholar] [CrossRef]
- Yang, K.; Yu, Z.; Luo, Y.; Yang, Y.; Zhao, L.; Zhou, X. Spatial and temporal variations in the relationship between lake water surface temperatures and water quality—A case study of Dianchi Lake. Sci. Total Environ. 2018, 624, 859–871. [Google Scholar] [CrossRef]
- Mziray, P.; Kimirei, I.A.; Staehr, P.A.; Lugomela, C.V.; Perry, W.L.; Trolle, D.; O’Reilly, C.M.; Mgana, H.F. Seasonal patterns of thermal stratification and primary production in the northern parts of Lake Tanganyika. J. Great Lakes Res. 2018, 44, 1209–1220. [Google Scholar] [CrossRef]
- Kirillin, G.; Shatwell, T. Generalized scaling of seasonal thermal stratification in lakes. Earth-Sci. Rev. 2016, 161, 179–190. [Google Scholar] [CrossRef]
- Consi, T.; Anderson, G.; Barske, G.; Bootsma, H.; Hansen, T.; Janssen, J.; Klump, J.; Paddock, R.; Szmania, D.; Waples, J. Measurement of Spring Thermal Stratification in Lake Michigan with the GLUCOS Observing System; IEEE: New York City, NY, USA, 2009; pp. 1–5. [Google Scholar]
- Biddanda, B.A.; Weinke, A.D.; Kendall, S.T.; Gereaux, L.C.; Holcomb, T.M.; Snider, M.J.; Dila, D.K.; Long, S.A.; VandenBerg, C.; Knapp, K.; et al. Chronicles of hypoxia: Time-series buoy observations reveal annually recurring seasonal basin-wide hypoxia in Muskegon Lake—A Great Lakes estuary. J. Great Lakes Res. 2018, 44, 219–229. [Google Scholar] [CrossRef]
- Woolway, R.I.; Maberly, S.C.; Jones, I.D.; Feuchtmayr, H. A novel method for estimating the onset of thermal stratification in lakes from surface water measurements. Water Resour. Res. 2014, 50, 5131–5140. [Google Scholar] [CrossRef]
- Gorham, E.; Boyce, F.M. Influence of Lake Surface Area and Depth Upon Thermal Stratification and the Depth of the Summer Thermocline. J. Great Lakes Res. 1989, 15, 233–245. [Google Scholar] [CrossRef]
- Handcock, R.N.; Torgersen, C.E.; Cherkauer, K.A.; Gillespie, A.R.; Tockner, K.; Faux, R.N.; Tan, J. Thermal infrared remote sensing of water temperature in riverine landscapes. Fluv. Remote Sens. Sci. Manag. 2012, 1, 85–113. [Google Scholar]
- Lee, E.; Yoon, H.; Hyun, S.P.; Burnett, W.C.; Koh, D.-C.; Ha, K.; Kim, D.-J.; Kim, Y.; Kang, K.-M. Unmanned aerial vehicles (UAVs)-based thermal infrared (TIR) mapping, a novel approach to assess groundwater discharge into the coastal zone. Limnol. Oceanogr. Methods 2016, 14, 725–735. [Google Scholar] [CrossRef]
- Chung, M.; Detweiler, C.; Hamilton, M.; Higgins, J.; Ore, J.-P.; Thompson, S. Obtaining the Thermal Structure of Lakes from the Air. Water 2015, 7, 6467. [Google Scholar] [CrossRef]
- DeMario, A.; Lopez, P.; Plewka, E.; Wix, R.; Xia, H.; Zamora, E.; Gessler, D.; Yalin, A.P. Water Plume Temperature Measurements by an Unmanned Aerial System (UAS). Sensors 2017, 17, 306. [Google Scholar] [CrossRef] [PubMed]
- Koparan, C.; Koc, A.; Privette, C.; Sawyer, C. In Situ Water Quality Measurements Using an Unmanned Aerial Vehicle (UAV) System. Water 2018, 10, 264. [Google Scholar] [CrossRef]
- Ore, J.-P.; Detweiler, C. Sensing water properties at precise depths from the air. J. Field Robot. 2018, 35, 1205–1221. [Google Scholar] [CrossRef]
- Koparan, C.; Koc, A.; Privette, C.; Sawyer, C.; Sharp, J. Evaluation of a UAV-Assisted Autonomous Water Sampling. Water 2018, 10, 655. [Google Scholar] [CrossRef]
- Koparan, C.; Koc, A.B.; Privette, C.V.; Sawyer, C.B. Autonomous In Situ Measurements of Noncontaminant Water Quality Indicators and Sample Collection with a UAV. Water 2019, 11, 604. [Google Scholar] [CrossRef]
- Pilgrim, C.M.; Mikhailova, E.A.; Post, C.J.; Hains, J.J. Spatial and temporal analysis of land cover changes and water quality in the Lake Issaqueena watershed, South Carolina. Environ. Monit. Assess. 2014, 186, 7617–7630. [Google Scholar] [CrossRef] [PubMed]
- South Carolina Department of Health and Environmental Control (SCDHEC). State of South Carolina Monitoring Strategy for Calender Year 2018; SCDHEC: Columbia, SC, USA, 2018. [Google Scholar]
- Freeman, P.K.; Freeland, R.S. Agricultural UAVs in the U.S.: Potential, policy, and hype. Remote Sens. Appl. Soc. Environ. 2015, 2, 35–43. [Google Scholar] [CrossRef]
- Ardupilot. Automatic Landing; Setting the Flare Point. Available online: http://ardupilot.org/plane/docs/automatic-landing.html (accessed on 28 May 2020).
- Ahmad, H.R.; Aziz, T.; Rehman, Z.R.; Saifullah. Chapter 15—Spatial Mapping of Metal-Contaminated Soils A2 - Hakeem, Khalid Rehman. In Soil Remediation and Plants; Sabir, M., Öztürk, M., Mermut, A.R., Eds.; Academic Press: San Diego, CA, USA, 2015; pp. 415–431. [Google Scholar] [CrossRef]
- Ligges, U.; Mächler, M. Scatterplot3d-an r Package for Visualizing Multivariate Data. Available online: https://www.econstor.eu/handle/10419/77160 (accessed on 28 May 2020).








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Sensor | Difference (%) | t Value (DF) | p Value | |||
|---|---|---|---|---|---|---|---|
| Mean | SD | Mean | SD | ||||
| Probe Depth (m) | 0.973 | 0.551 | 1.07 | 0.551 | 0.009 | 2.03 (18) | 0.57 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Koparan, C.; Koc, A.B.; Sawyer, C.; Privette, C. Temperature Profiling of Waterbodies with a UAV-Integrated Sensor Subsystem. Drones 2020, 4, 35. https://doi.org/10.3390/drones4030035
Koparan C, Koc AB, Sawyer C, Privette C. Temperature Profiling of Waterbodies with a UAV-Integrated Sensor Subsystem. Drones. 2020; 4(3):35. https://doi.org/10.3390/drones4030035
Chicago/Turabian StyleKoparan, Cengiz, Ali Bulent Koc, Calvin Sawyer, and Charles Privette. 2020. "Temperature Profiling of Waterbodies with a UAV-Integrated Sensor Subsystem" Drones 4, no. 3: 35. https://doi.org/10.3390/drones4030035
APA StyleKoparan, C., Koc, A. B., Sawyer, C., & Privette, C. (2020). Temperature Profiling of Waterbodies with a UAV-Integrated Sensor Subsystem. Drones, 4(3), 35. https://doi.org/10.3390/drones4030035