Using Digital Surface Models from UAS Imagery of Fire Damaged Sphagnum Peatlands for Monitoring and Hydrological Restoration


Abstract
1. Introduction
2. Materials and Methods
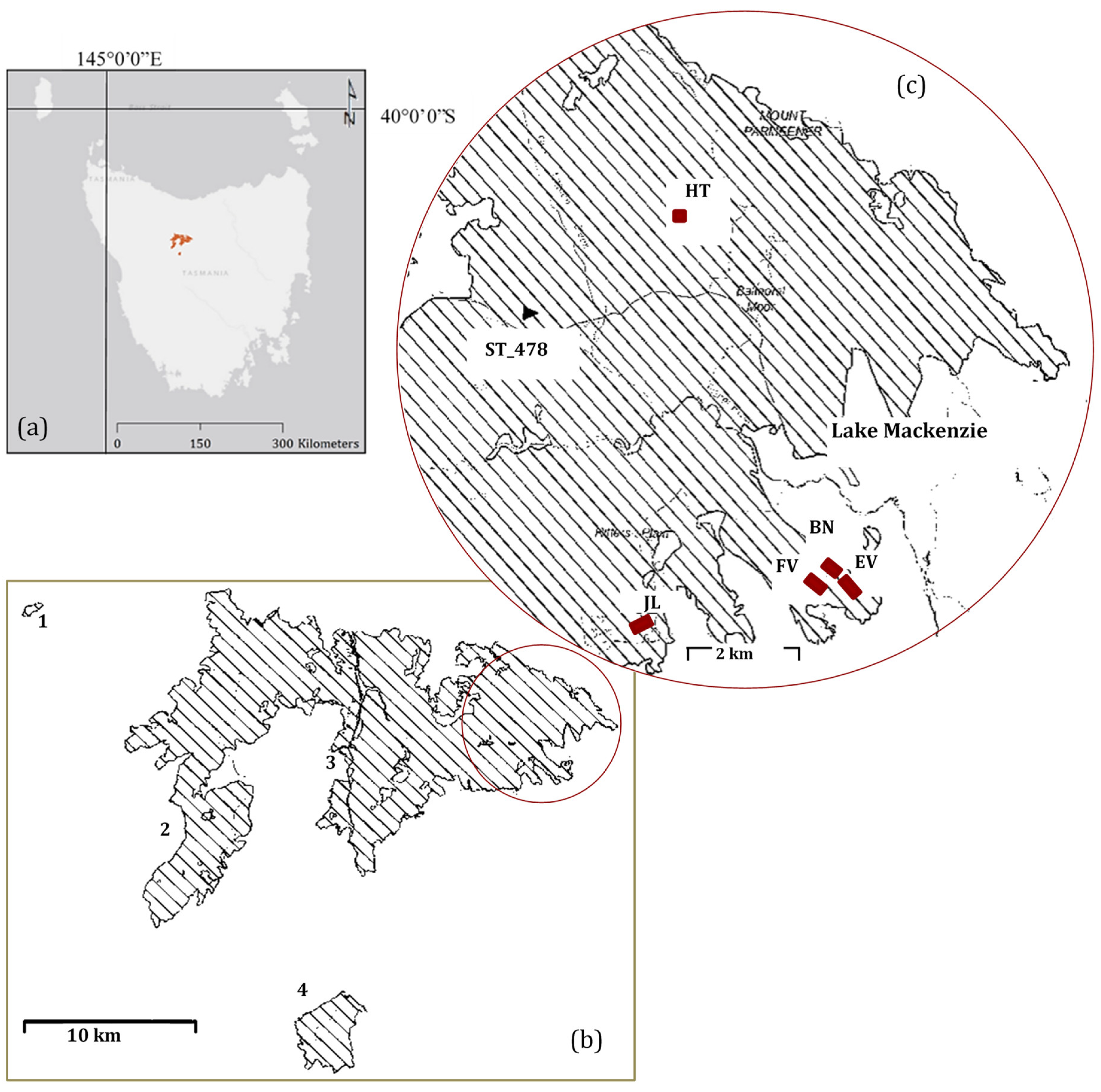
2.1. Study Area
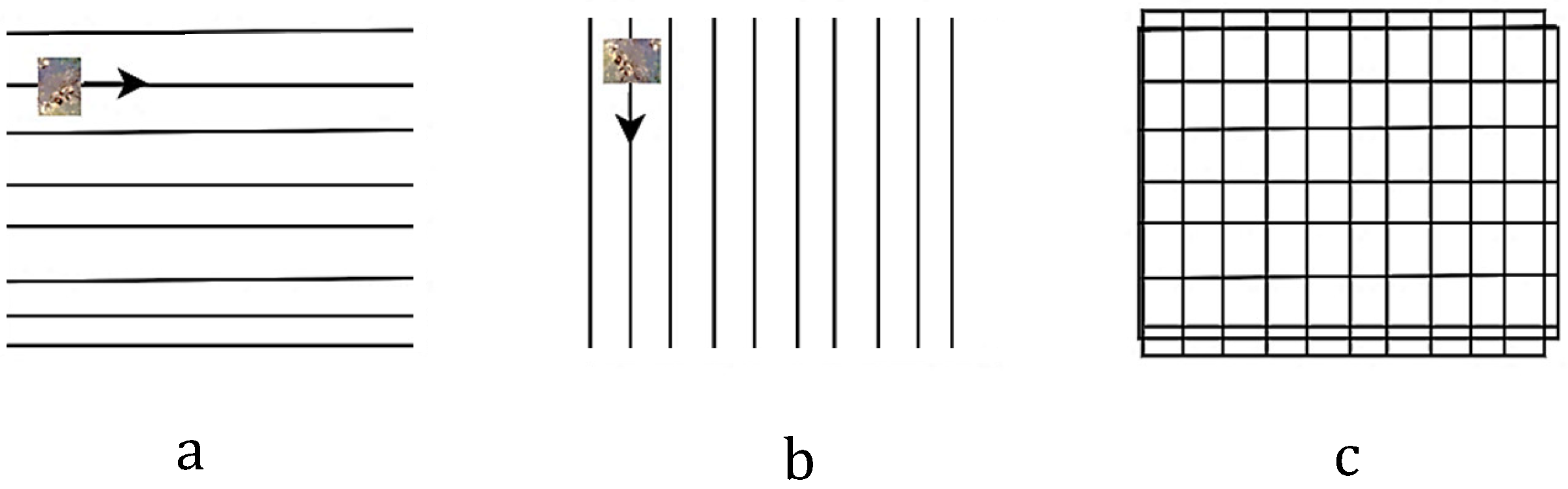
2.2. UAS Platform
2.3. Georeferencing
2.4. Accuracy Assessment
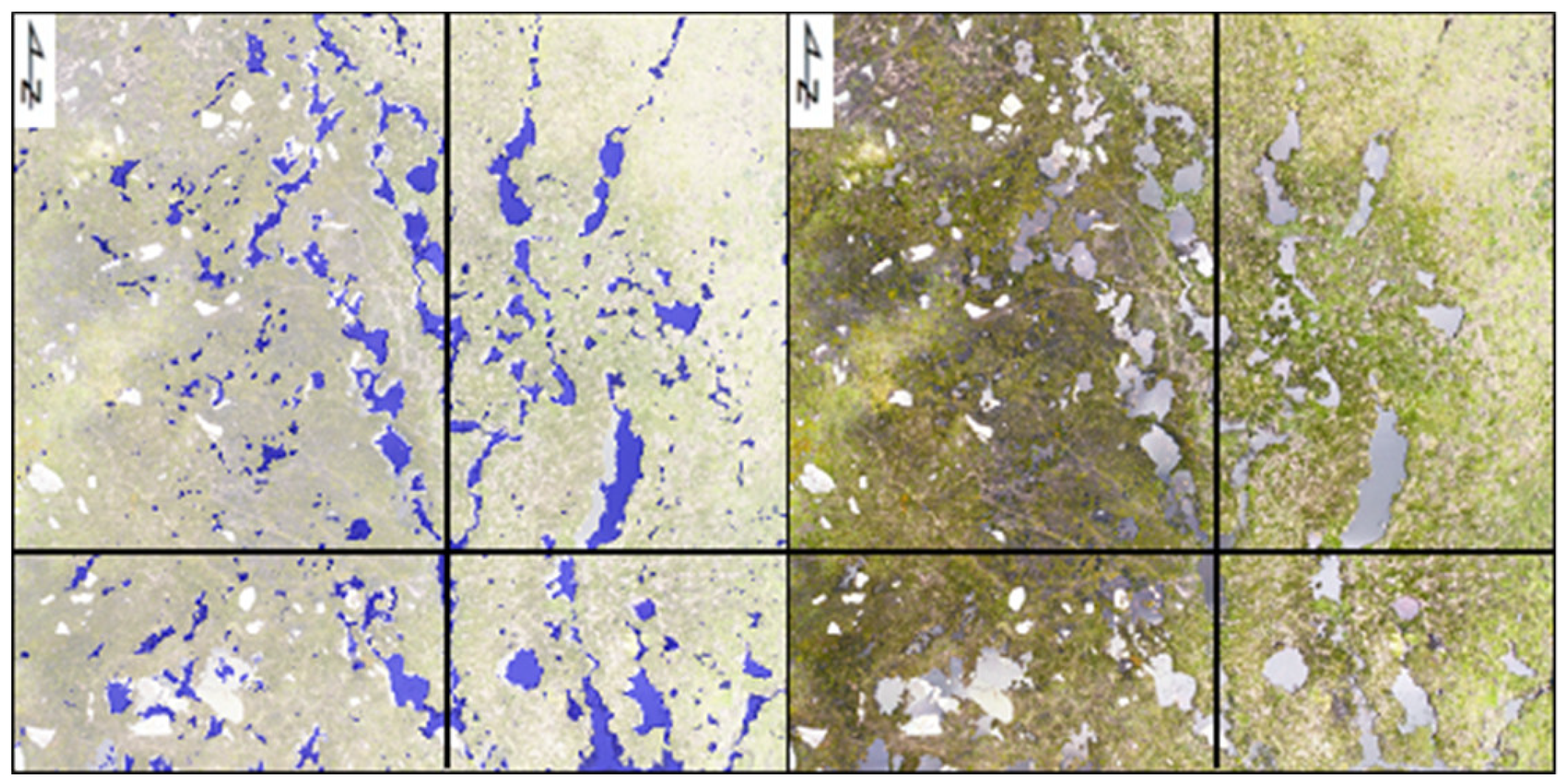
2.5. Hydrological Surface Models
3. Results
3.1. DSM Accuracy Assessment
3.2. Hydrological Surface Model Assessment
4. Discussion
4.1. DSM Accuracy Assessment
4.2. Hydrological Models
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- French, B.; Hope, G.; Pryor, L.D.; Bowman, D.M. The vulnerability of peatlands in the Australian Alps. J. Aust. Netw. Plant Conserv. 2016, 24, 1–16. [Google Scholar]
- Page, S.E.; Baird, A.J. Peatlands and Global Change: Response and Resilience. Annu. Rev. Environ. Resour. 2016, 41, 35–57. [Google Scholar] [CrossRef]
- Williams, R.; Warwaick, P.; McDougall, K.; Mansergh, I.; Heinze, D.; Camac, J.; Nash, M.; Morgan, J.; Hoffman, A. 6. Alpine ecosystems. In Biodiversity and Environmental Change: Monitoring, Challenges and Direction; Lindenmayer, D., Burns, E., Thurgate, N., Lowe, A., Eds.; CSIRO Publishing: Melbourne, VIC, Australia, 2014; pp. 168–212. ISBN 0643108578. [Google Scholar]
- Cairns, S.; Robertson, G. 2014 Survey of Feral Horses (Equus ferus caballus) in the Australian Alps; The Australian Alps Liaison Committee: Armidale, NSW, Australia, 2015; p. 23. [Google Scholar]
- Dunlop, M.; Brown, P.R. Implications of Climate Change for Australia’s National Reserve System: A Preliminary Assessment; Department of Climate Change: Canberra, ACT, Australia, 2008. [Google Scholar]
- Limpens, J.; Berendse, F.; Blodau, C.; Canadell, J.G.; Freeman, C.; Holden, J.; Roulet, N.T.; Rydin, H.; Schaepman-Strub, G. Peatlands and the carbon cycle: from local processes to global implications—A synthesis. Biogeosciences 2008, 5, 1475–1491. [Google Scholar] [CrossRef]
- Turetsky, M.R.; Benscoter, B.; Page, S.; Rein, G.; Van Der Werf, G.R.; Watts, A. Global vulnerability of peatlands to fire and carbon loss. Nat. Geosci. 2015, 8, 11–14. [Google Scholar] [CrossRef]
- Dieleman, C.M.; Branfireun, B.A.; Mclaughlin, J.W.; Lindo, Z. Climate change drives a shift in peatland ecosystem plant community: Implications for ecosystem function and stability. Glob. Chang. Biol. 2015, 21, 388–395. [Google Scholar] [CrossRef]
- Hope, G.; Nanson, R.; Flett, I. Peat and Organic-Rich sediments. In The Peat-Forming Mires of the Australian Capital Territory; Territory and Municipal Services: Canberra, ACT, Australia, 2009; pp. 31–38. [Google Scholar]
- Clarkson, B.; Whinam, J.; Good, R.; Watts, C. Restoration of Sphagnum and restiad peatlands in Australia and New Zealand reveals similar approaches. Restor. Ecol. 2017, 25, 301–311. [Google Scholar] [CrossRef]
- Hope, G.S.; Whinam, J. The Peatlands of the Australasian Region. Stapfia 2005, 35, 397–434. [Google Scholar]
- Rydin, H.; Jeglum, J. Sphagnum—The builder of boreal peatlands. In The Biology of Peatlands; Oxford University Press: New York, NY, USA, 2013; pp. 65–75. ISBN 978-0-19-960299-5. [Google Scholar]
- Holz, A.; Wood, S.W.; Veblen, T.T.; Bowman, D.M.J.S. Effects of high-severity fire drove the population collapse of the subalpine Tasmanian endemic conifer Athrotaxis cupressoides. Glob. Chang. Biol. 2015, 21, 445–458. [Google Scholar] [CrossRef]
- Read, J.; Hill, R.S. The Dynamics of Some Rainforest Associations in Tasmania. J. Ecol. 1988, 76, 558–584. [Google Scholar] [CrossRef]
- Ogden, J. Investigations of the dendrochronology of the genus Athrotaxis D. Don (Taxodiaceae) in Tasmania. Tree Ring Bull. 1978, 38, 1–13. [Google Scholar]
- Good, R.; Wright, G.; Whinam, J.; Hope, G. Restoration of mires of the Australian Alps following the 2003 wildfires. In Altered Ecologies: Fire, Climate and Human Influences on Terrestrial Landscapes; Haberle, S., Stevenson, J., Prebble, M., Eds.; ANU Press: Canberra, ACT, Australia, 2010; pp. 353–362. [Google Scholar]
- Hope, G. The mountain mires of southern New South Wales and the Australian Capital Territory: Their history and future. In Proceedings of an International Year of Moutains Conference; Mackay, J., Ed.; Australian Alps Liaison Committee: Canberra, ACT, Australia, 2003; pp. 65–67. [Google Scholar]
- Whinam, J.; Hope, G.; Good, R.; Wright, G. Post-fire experimental trials of vegetation restoration techniques in the peatlands of Namadgi (ACT) and Kosciuszko National Parks (NSW), Australia. In Terra Australis; ANU Press: Canberra, ACT, Australia, 2010; Volume 32, pp. 364–379. [Google Scholar]
- Natural Values Conservation Branch. Assessment of the Ecological Impacts of the 2016 Mersey Forest Fire Complex; Nature Conservation Report no 17/5; Department of Primary Industries, Parks, Water and Environment: Hobart, TAS, Australia, 2017; p. 142. [Google Scholar]
- Wimbush, D.J.; Costin, A.B. Trends in Vegetation at Kosciusko. II. Subalpine Range Transects, 1959–1978. Aust. J. Bot. 1979, 27, 789–831. [Google Scholar] [CrossRef]
- Kirkpatrick, J.B.; Dickinson, K.J.M. The impact of fire on tasmanian alpine vegetation and soils. Aust. J. Bot. 1984, 32, 613–629. [Google Scholar] [CrossRef]
- Harris, R.M.B.; Beaumont, L.J.; Vance, T.R.; Tozer, C.R.; Remenyi, T.A.; Perkins-Kirkpatrick, S.E.; Mitchell, P.J.; Nicotra, A.B.; McGregor, S.; Andrew, N.R.; et al. Biological responses to the press and pulse of climate trends and extreme events. Nat. Clim. Chang. 2018, 8, 579–587. [Google Scholar] [CrossRef]
- Clarke, P.J.; Martin, A.R.H. Sphagnum peatlands of Kosciuszko National Park in relation to altitude, time and disturbance. Aust. J. Bot. 1999, 47, 519–536. [Google Scholar] [CrossRef]
- Turner, D.; Lucieer, A.; de Jong, S.M. Time series analysis of landslide dynamics using an Unmanned Aerial Vehicle (UAV). Remote Sens. 2015, 7, 1736–1757. [Google Scholar] [CrossRef]
- Hemerly, E.M. Automatic georeferencing of images acquired by UAV’s. Int. J. Autom. Comput. 2014, 11, 347–352. [Google Scholar] [CrossRef]
- Clapuyt, F.; Vanacker, V.; Oost, K. Van Geomorphology Reproducibility of UAV-based earth topography reconstructions based on Structure-from-Motion algorithms. Geomorphology 2016, 260, 4–15. [Google Scholar] [CrossRef]
- Harwin, S.; Lucieer, A. Assessing the accuracy of georeferenced point clouds produced via multi-view stereopsis from Unmanned Aerial Vehicle (UAV) imagery. Remote Sens. 2012, 4, 1573–1599. [Google Scholar] [CrossRef]
- Tonkin, T.N.; Midgley, N.G. Ground-control networks for image based surface reconstruction: An investigation of optimum survey designs using UAV derived imagery and structure-from-motion photogrammetry. Remote Sens. 2016, 8, 786. [Google Scholar] [CrossRef]
- Harwin, S.; Lucieer, A.; Osborn, J. The impact of the calibration method on the accuracy of point clouds derived using unmanned aerial vehicle multi-view stereopsis. Remote Sens. 2015, 7, 11933–11953. [Google Scholar] [CrossRef]
- Gindraux, S.; Boesch, R.; Farinotti, D. Accuracy assessment of digital surface models from Unmanned Aerial Vehicles’ imagery on glaciers. Remote Sens. 2017, 9, 186. [Google Scholar] [CrossRef]
- Fraser, B.T.; Congalton, R.G. Issues in Unmanned Aerial Systems (UAS) data collection of complex forest environments. Remote Sens. 2018, 10, 908. [Google Scholar] [CrossRef]
- Verhoeven, G. Software Review Taking Computer Vision Aloft—Archaeological Three-dimensional Reconstructions from Aerial Photographs with PhotoScan. Archaeol. Prospect. 2011, 73, 67–73. [Google Scholar] [CrossRef]
- Lucieer, A.; Turner, D.; King, D.H.; Robinson, S.A. Using an unmanned aerial vehicle (UAV) to capture micro-topography of antarctic moss beds. Int. J. Appl. Earth Obs. Geoinf. 2014, 27, 53–62. [Google Scholar] [CrossRef]
- Tarboton, G. A new method for the determination of flow directions and upslope areas in grid digital elevation models. Water Resour. Res. 1997, 33, 309–319. [Google Scholar] [CrossRef]
- Fairfield, J.; Leymarie, P. Drainage networks from grid digital elevation models. Water Resour. Res. 1991, 27, 709–717. [Google Scholar] [CrossRef]
- Tarboton, D.G.; Mohammed, I.N. TauDEM 5.1: Quick Start Guide to Using the TauDEM ArcGIS Toolbox; Utah State University: Logan, UT, USA, 2013. [Google Scholar]
- Beven, K.J.; Kirkby, M.J. A physically based, variable contributing area model of basin hydrology. Hydrol. Sci. 1979, 24, 43–69. [Google Scholar] [CrossRef]
- D’Oleire-Oltmanns, S.; Marzolff, I.; Peter, K.; Ries, J. Unmanned Aerial Vehicle (UAV) for Monitoring Soil Erosion in Morocco. Remote Sens. 2012, 4, 3390–3416. [Google Scholar] [CrossRef]
- Mancini, F.; Dubbini, M.; Gattelli, M.; Stecchi, F.; Fabbri, S.; Gabbianelli, G. Using unmanned aerial vehicles (UAV) for high-resolution reconstruction of topography: The structure from motion approach on coastal environments. Remote Sens. 2013, 5, 6880–6898. [Google Scholar] [CrossRef]
- Uysal, M.; Toprak, A.S.; Polat, N. DEM generation with UAV Photogrammetry and accuracy analysis in Sahitler hill. Measurement 2015, 73, 539–543. [Google Scholar] [CrossRef]
- James, M.R.; Robson, S.; Oleire-oltmanns, S.; Niethammer, U. Geomorphology Optimising UAV topographic surveys processed with structure-from-motion: Ground control quality, quantity and bundle adjustment. Geomorphology 2017, 280, 51–66. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Jack’s Lagoon | Eagle Valley | Flat Valley | Basin | Heath | ||
|---|---|---|---|---|---|---|
| (JL) | (EV) | (FV) | (BN) | (HT) | ||
| Area (m²) | 10,280 | 7044 | 3805 | 5250 | 4928 | |
| Altitude range ASL (m) | 1258–1266 | 1202–1206 | 1206–1222 | 1177–1201 | 1119–1141 | |
| Flying height AGL (m) | 40 | 30 | 30 | 30 | 30 | |
| Number of Images | Grid 1 | 364 | 243 | 140 | 274 | 134 |
| Grid 2 | 357 | 271 | 160 | 292 | 169 | |
| Double Grid | 721 | 514 | 300 | 566 | 303 | |
| GSD (cm) | Orthophoto | 2 | 1 | 1 | 1 | 2 |
| DSM | 3 | 2 | 2 | 2 | 3 |
| All_GCP | Four_GCP | Sky_GCP | |||
|---|---|---|---|---|---|
| Basin—BN | RMSE (m) | 0.03 | 0.58 | 0.28 | |
| STDEV (ABS error) | 0.02 | 0.41 | 0.32 | ||
| Max slope (°) | 0.00 | domed | 1.50 | ||
| Eagle Valley—EV | RMSE (m) | 0.03 | 0.83 | 1.20 | |
| STDEV (ABS error) | 0.03 | 0.33 | 0.45 | ||
| Max slope (°) | 0.00 | domed | 1.25 | ||
| Flat Valley—FV | RMSE (m) | 0.09 | 0.19 | 0.73 | |
| STDEV (ABS error) | 0.04 | 0.07 | 0.35 | ||
| Max slope (°) | 0.00 | 0.10 | 1.10 | ||
| Heath—HT | RMSE (m) | 0.02 | 0.03 | 0.21 | |
| STDEV (ABS error) | 0.01 | 0.02 | 0.14 | ||
| Max slope (°) | 0.00 | 0.05 | 0.35 | ||
| Jack’s Lagoon—JL | RMSE (m) | 0.02 | 0.02 | 0.31 | |
| STDEV (ABS error) | 0.01 | 0.01 | 0.19 | ||
| Max slope (°) | 0.00 | 0.04 | 0.75 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
De Roos, S.; Turner, D.; Lucieer, A.; Bowman, D.M.J.S. Using Digital Surface Models from UAS Imagery of Fire Damaged Sphagnum Peatlands for Monitoring and Hydrological Restoration. Drones 2018, 2, 45. https://doi.org/10.3390/drones2040045
De Roos S, Turner D, Lucieer A, Bowman DMJS. Using Digital Surface Models from UAS Imagery of Fire Damaged Sphagnum Peatlands for Monitoring and Hydrological Restoration. Drones. 2018; 2(4):45. https://doi.org/10.3390/drones2040045
Chicago/Turabian StyleDe Roos, Shannon, Darren Turner, Arko Lucieer, and David M. J. S. Bowman. 2018. "Using Digital Surface Models from UAS Imagery of Fire Damaged Sphagnum Peatlands for Monitoring and Hydrological Restoration" Drones 2, no. 4: 45. https://doi.org/10.3390/drones2040045
APA StyleDe Roos, S., Turner, D., Lucieer, A., & Bowman, D. M. J. S. (2018). Using Digital Surface Models from UAS Imagery of Fire Damaged Sphagnum Peatlands for Monitoring and Hydrological Restoration. Drones, 2(4), 45. https://doi.org/10.3390/drones2040045