Adaptive Backstepping Sliding Mode Control for Direct Driven Hydraulics †

Abstract
:1. Introduction
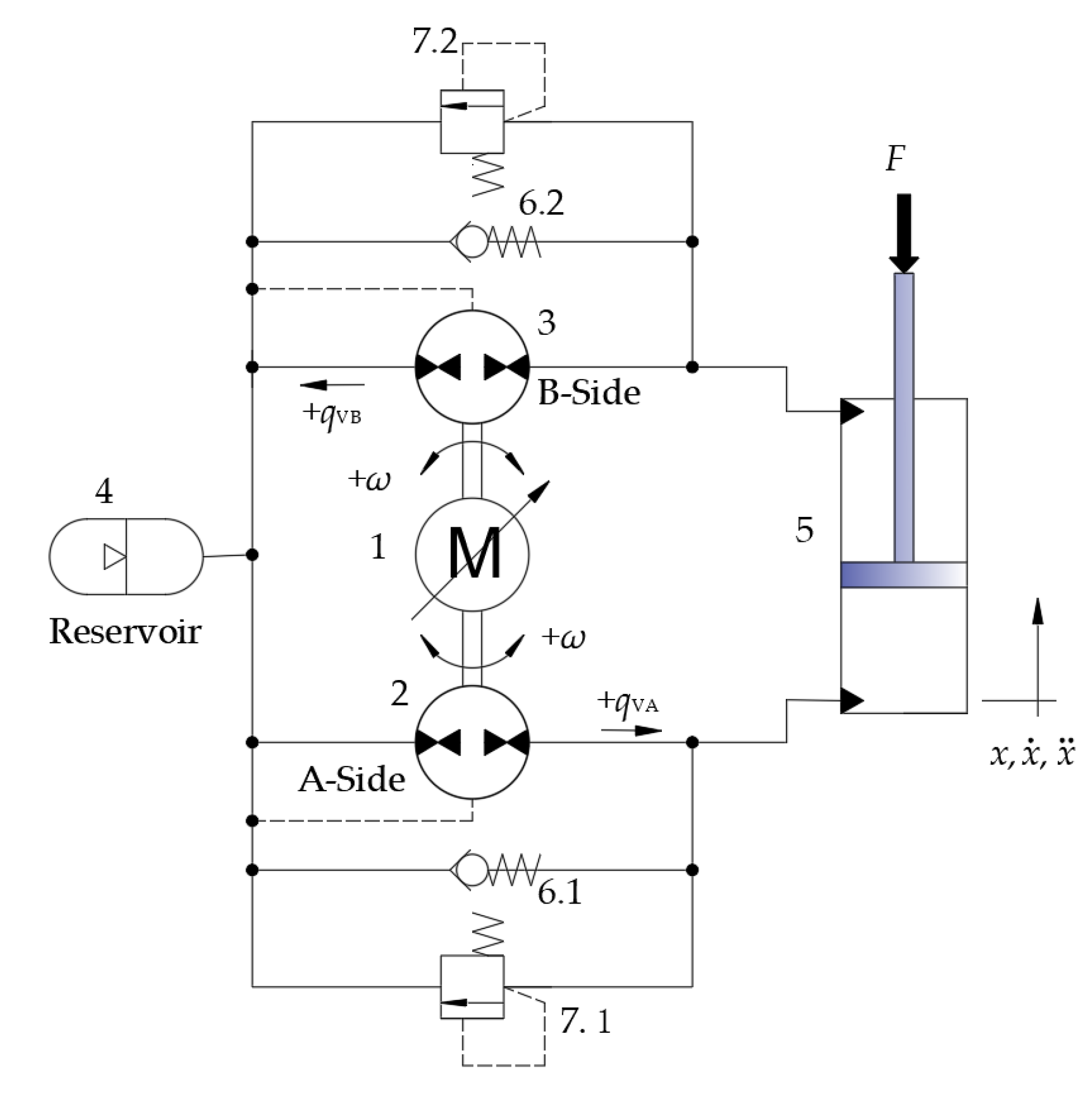
2. DDH and Modelling
2.1. DDH
2.2. Modelling of DDH
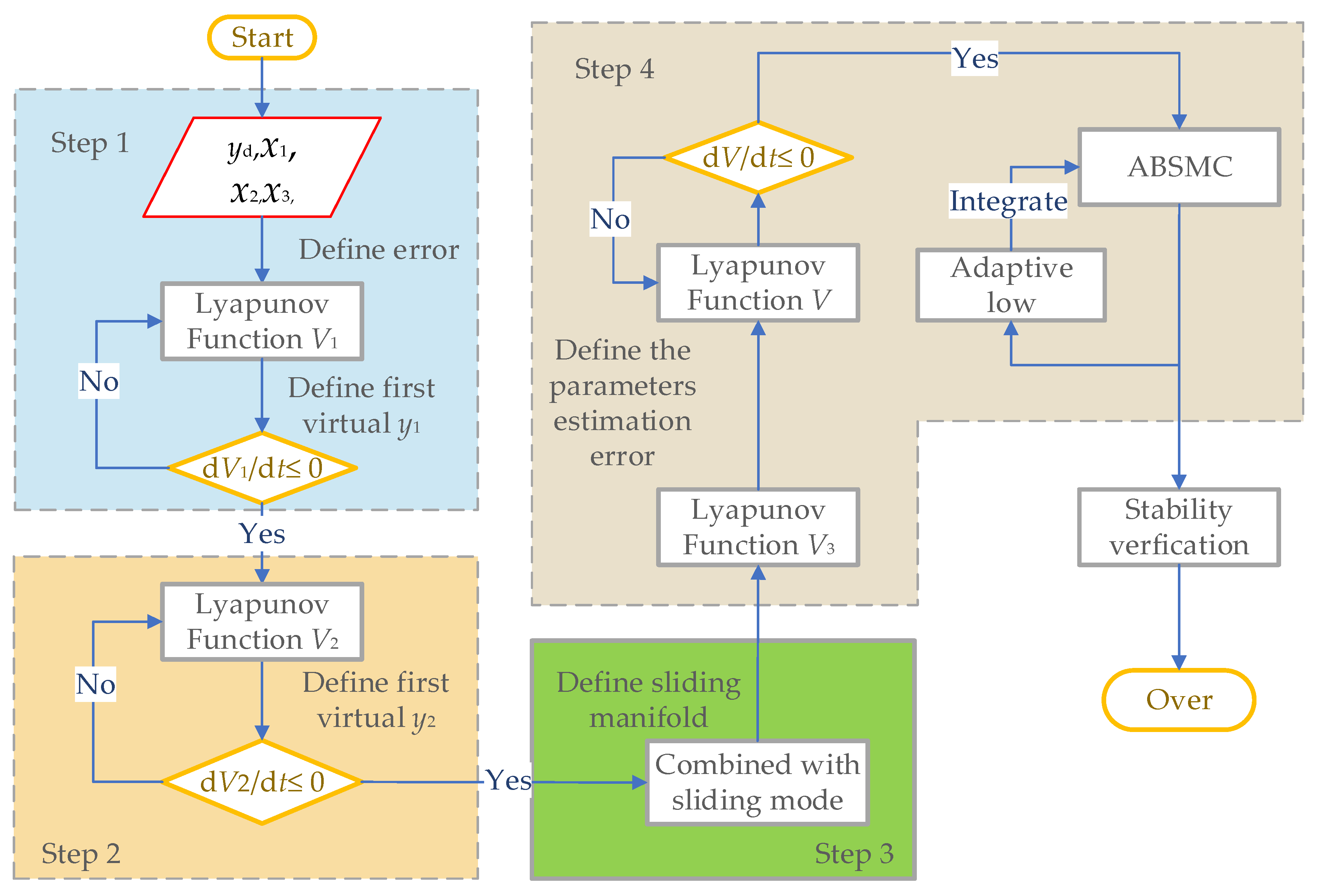
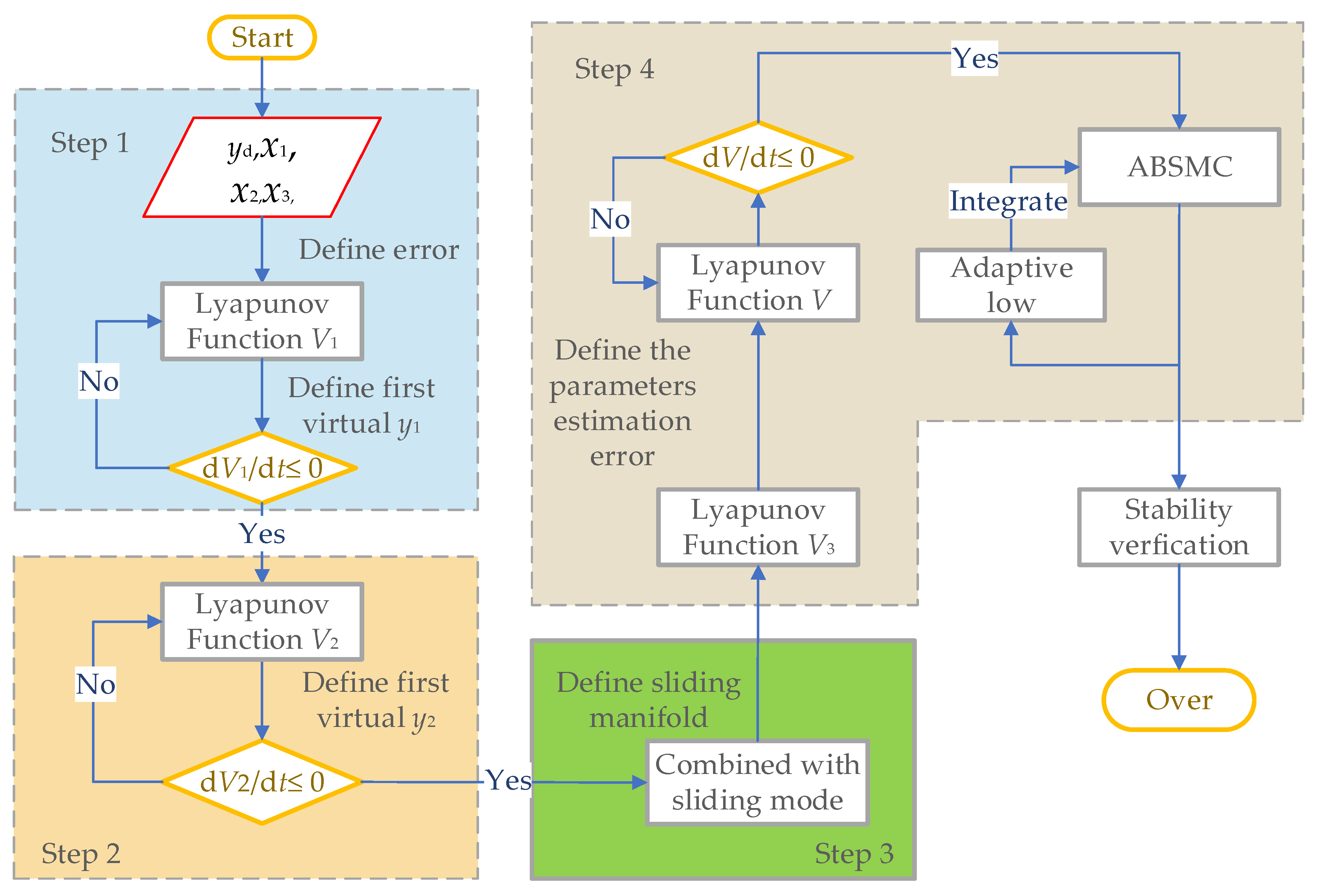
3. Design of ABSMC Controller
3.1. Design of ABSMC and the Adaptive Law of Unknown Parameters
3.2. Stability Verification
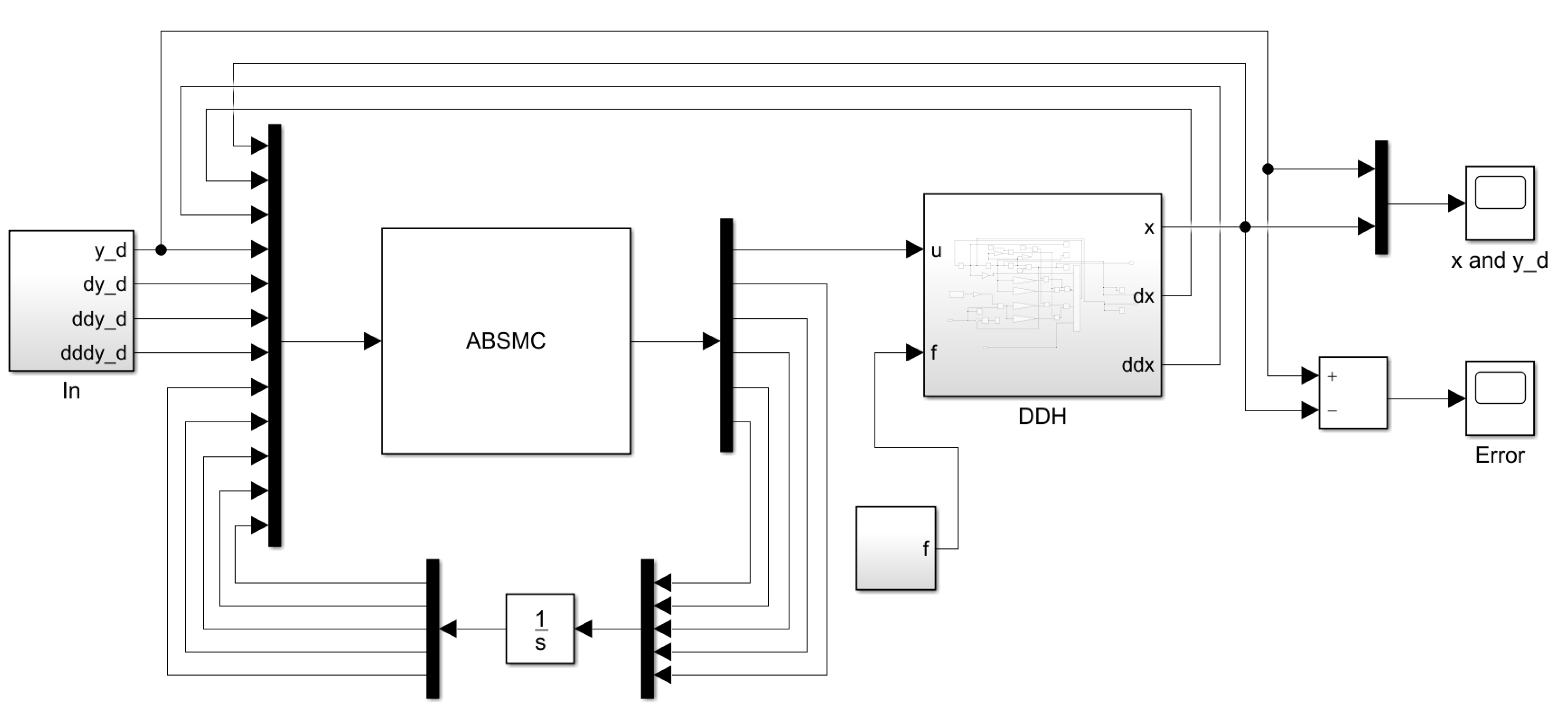
4. Simulation and Analysis
4.1. Simulation Model
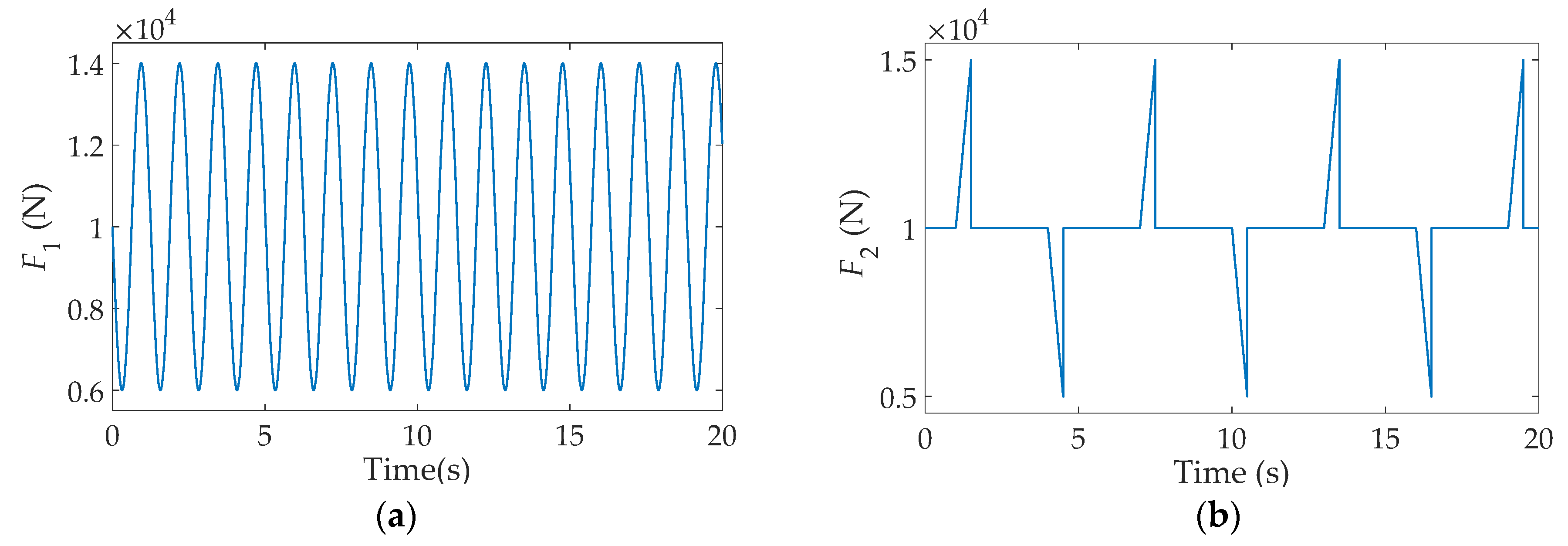
4.2. Load and Disturbance
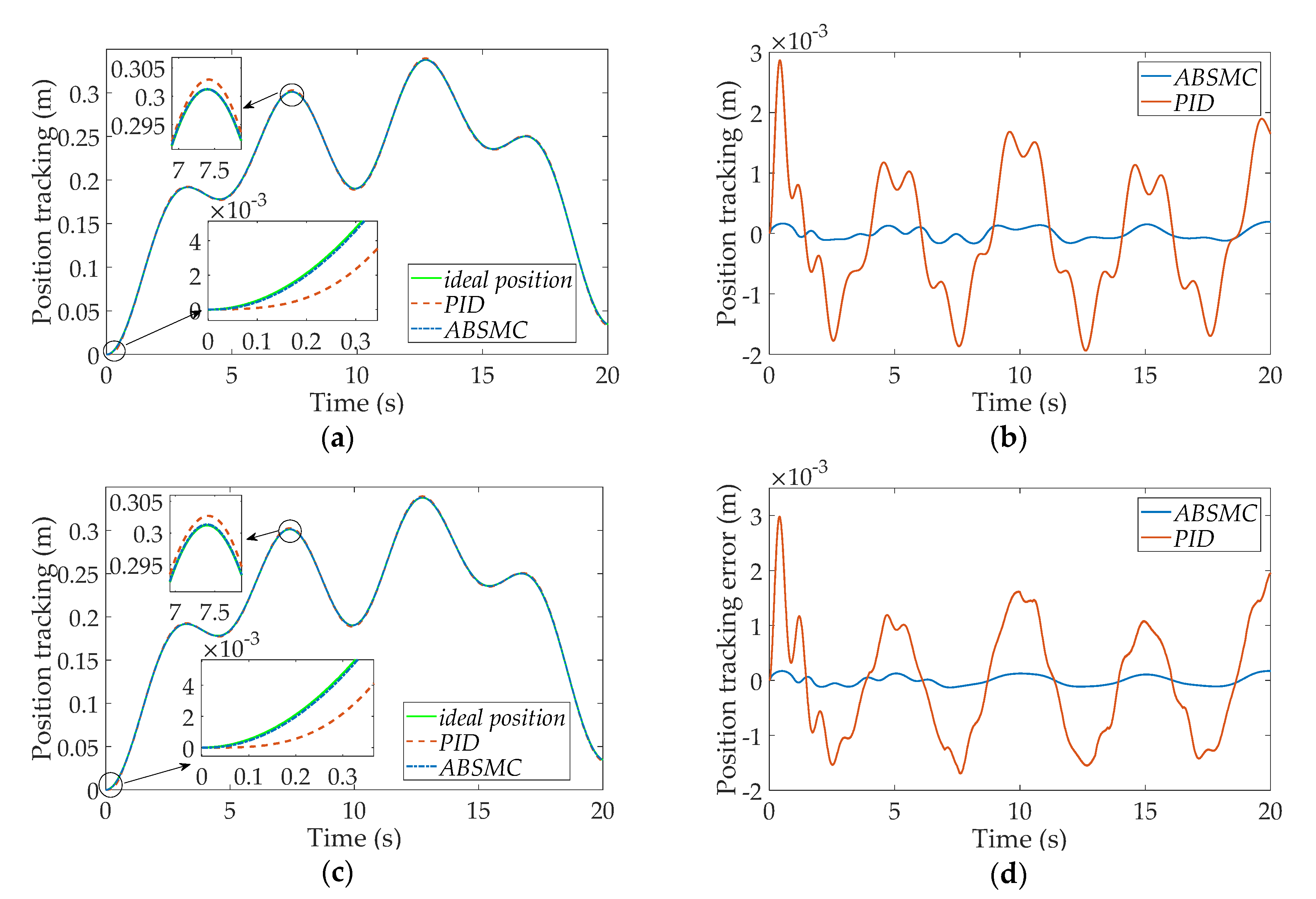
4.3. Simulation Analysis
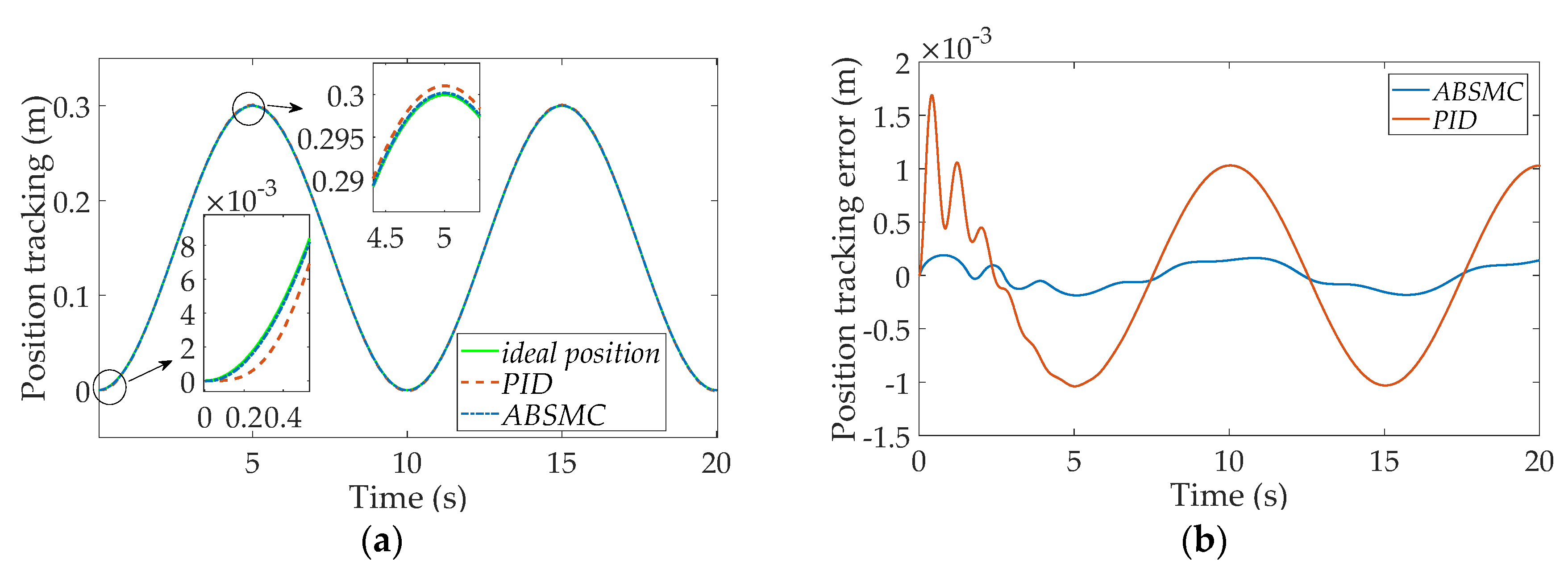
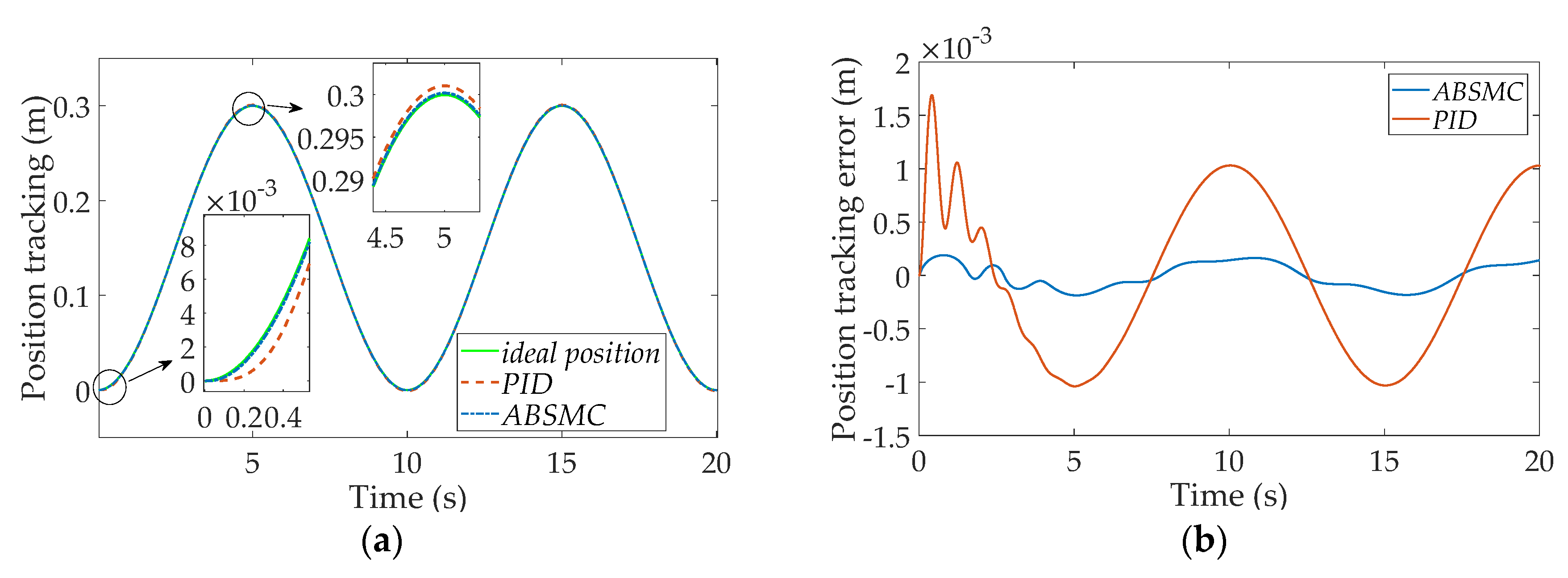
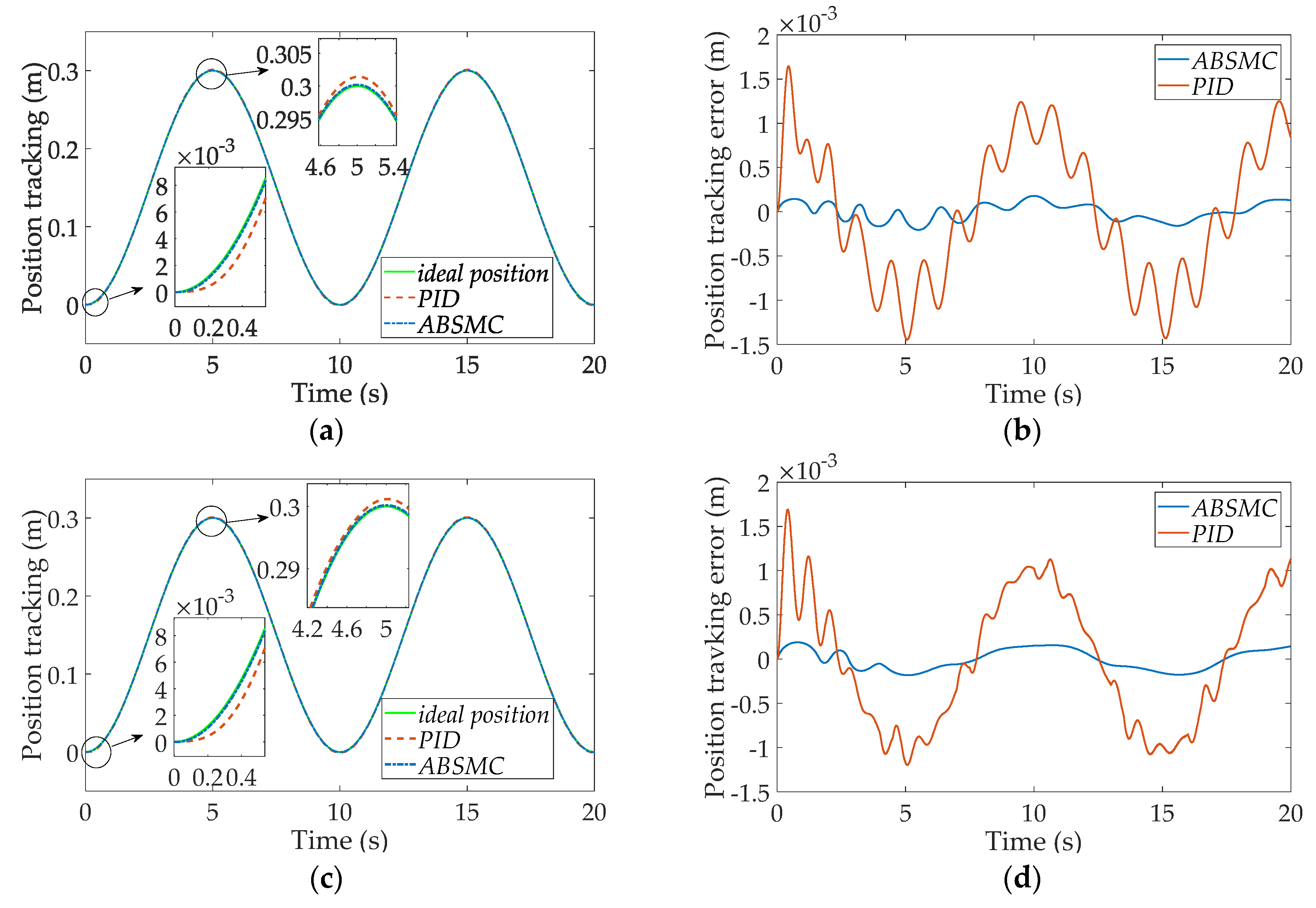
4.3.1. Simple Sinusoidal Signal
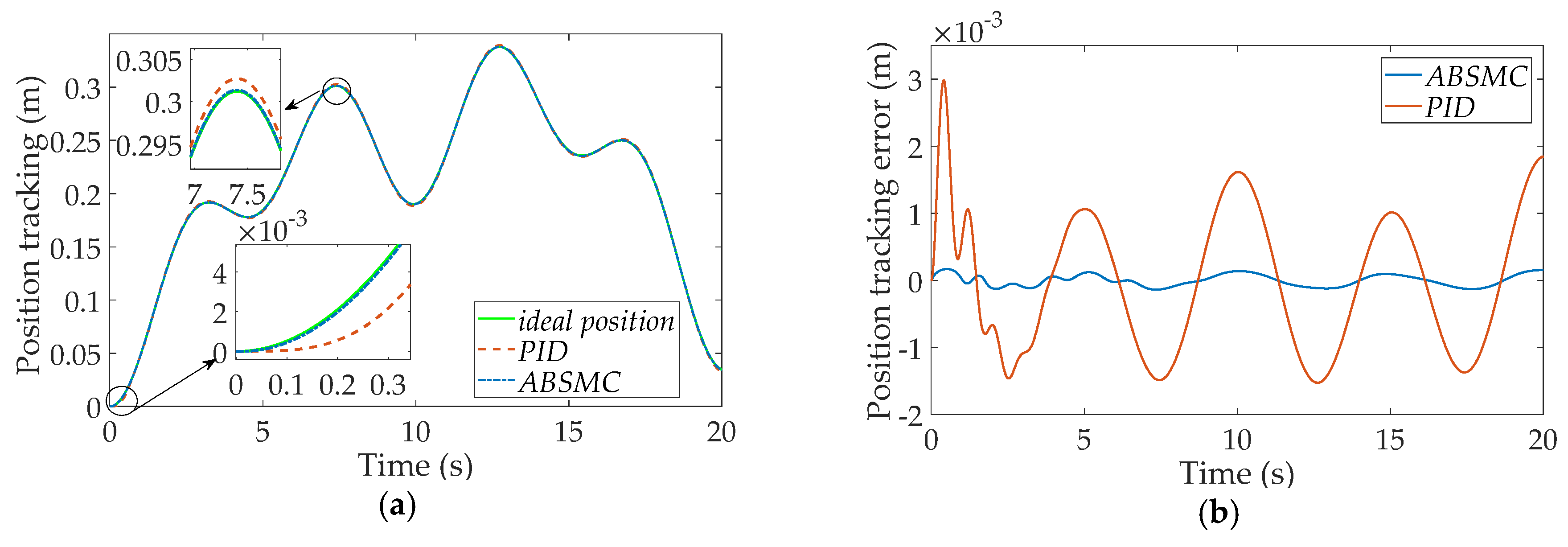
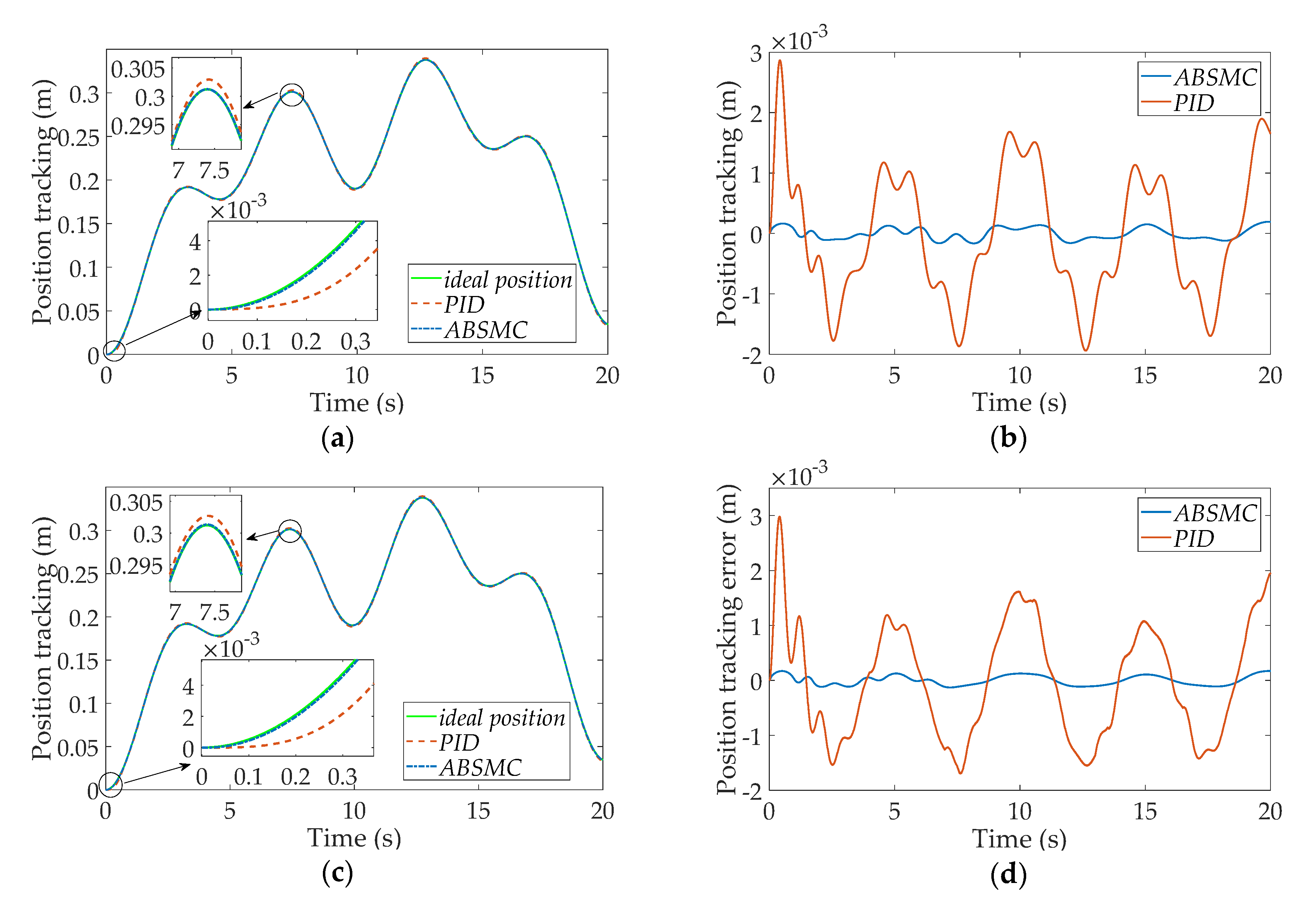
4.3.2. Multifrequency Sinusoidal Signal
5. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
Abbreviations
| EHA | Electro-hydraulic actuator. |
| DDH | Direct driven hydraulics. |
| ABSMC | Adaptive backstepping sliding mode control. |
| PID | Proportional–integra–-differential. |
References
- Ketelsen, S.; Padovani, D.; Andersen, T.O.; Ebbesen, M.K.; Schmidt, L. Classification and Review of Pump-Controlled Differential Cylinder Drives. Energies 2019, 12, 1293. [Google Scholar] [CrossRef]
- Kai, Z. Research on the Characteristics of Position Control Based on Variable Speed Pump Control System. Master’s Thesis, Shanghai Jiao Tong University, Shanghai, China, 2017. [Google Scholar]
- Grabbel, J.; Ivantysynova, M. An Investigation of Swash Plate Control Concepts for Displacement Controlled Actuators. Int. J. Fluid Power 2005, 6, 19–36. [Google Scholar] [CrossRef]
- Niraula, A.; Zhang, S.; Minav, T.; Pietola, M. Effect of Zonal Hydraulics on Energy Consumption and Boom Structure of a Micro-Excavator. Energies 2018, 11, 2088. [Google Scholar] [CrossRef]
- Agostini, T.; Negri, V.D.; Minav, T.; Pietola, M. Effect of Energy Recovery on Efficiency in Electro-Hydrostatic Closed System for Differential Actuator. Actuators 2020, 9, 12. [Google Scholar] [CrossRef]
- Altare, G.; Vacca, A. A Design Solution for Efficient and Compact Electro-hydraulic Actuators. Procedia Eng. 2015, 106, 8–16. [Google Scholar] [CrossRef]
- Fu, S.; Wang, L.; Lin, T. Control of electric drive powertrain based on variable speed control in construction machinery. Autom. Constr. 2020, 119, 103281. [Google Scholar] [CrossRef]
- Lin, T.; Lin, Y.; Ren, H.; Chen, H.; Chen, Q.; Li, Z. Development and key technologies of pure electric construction machinery. Renew. Sustain. Energy Rev. 2020, 132, 110080. [Google Scholar] [CrossRef]
- Izzuddin, N.H.; Faudzi, A.M.A.; Johari, M.R.; Osman, K. System identification and predictive functional control for electro-hydraulic actuator system. In Proceedings of the IEEE International Symposium on Robotics & Intelligent Sensors, Langkawi, Malaysia, 18–20 October 2015; pp. 138–143. [Google Scholar]
- Tony Thomas, A.; Parameshwaran, R.; Sathiyavathi, S.; Vimala Starbino, A. Improved Position Tracking Performance of Electro Hydraulic Actuator Using PID and Sliding Mode Controller. IETE J. Res. 2019, 1–13. [Google Scholar] [CrossRef]
- Yao, J.; Deng, W. Active Disturbance Rejection Adaptive Control of Hydraulic Servo Systems. IEEE Trans. Ind. Electron. 2017, 64, 8023–8032. [Google Scholar] [CrossRef]
- Guo, K.; Wei, J.; Tian, Q. Nonlinear adaptive position tracking of an electro-hydraulic actuator. Proc. Inst. Mech. Eng. C J. Mech. Eng. Sci. 2015, 229, 3252–3265. [Google Scholar] [CrossRef]
- Alemu, A.E.; Fu, Y. Sliding mode control of electro-hydrostatic actuator based on extended state observer. In Proceedings of the 2017 29th Chinese Control And Decision Conference (CCDC), Chongqing, China, 28–30 May 2017; pp. 758–763. [Google Scholar]
- Qi, H.; Liu, S.; Yang, R.; Yu, Y. Research on new intelligent pump control based on sliding mode variable structure control. In Proceedings of the 2017 IEEE International Conference on Mechatronics and Automation (ICMA), Takamatsu, Japan, 6–9 August 2017. [Google Scholar]
- Miao, Z.; Cao, Y. Application of fuzzy PID controller for valveless hydraulic system driven by PMSM. J. Phys. Conf. Ser. 2019, 1168, 022010. [Google Scholar] [CrossRef]
- Guo, J.; Ye, C.; Wu, G. Simulation and Research on Position Servo Control System of Opposite Vertex Hydraulic Cylinder based on Fuzzy Neural Network. In Proceedings of the 2019 IEEE International Conference on Mechatronics and Automation (ICMA), Tianjin, China, 4–7 August 2019; pp. 1139–1143. [Google Scholar]
- Dong, H.; Gao, L.; Shen, P.; Li, X.; Lu, Y.; Dai, W. An interval type-2 fuzzy logic controller design method for hydraulic actuators of a human-like robot by using improved drone squadron optimization. Int. J. Adv. Robot. Syst. 2019, 16. [Google Scholar] [CrossRef]
- Zad, H.S.; Ulasyar, A.; Zohaib, A. Robust Model Predictive Position Control of Direct Drive Electro-Hydraulic Servo System. In Proceedings of the 2016 International Conference on Intelligent Systems Engineering (ICISE), Islamabad, Pakistan, 15–17 January 2016. [Google Scholar]
- Zhou, H.; Lao, L.; Chen, Y.; Yang, H. Discrete-time sliding mode control with an input filter for an electro-hydraulic actuator. IET Control Theory Appl. 2017, 11, 1333–1340. [Google Scholar] [CrossRef]
- Järf, A. Flow Compensation Using Hydraulic Accumulator in Direct Driven Hydraulic Differential Cylinder Application and Effects on Energy Efficiency. Master’s Thesis, Aalto University, Espoo, Finland, 2016. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Component | Parameters | Value |
|---|---|---|---|
| 1 | Synchronous Torque Motor | Rated Torque [Nm] | 4.5 |
| Rated Speed [rpm] | 2500 | ||
| 2 | A-Side Pump | Volumetric Displacement (DA) [cm3/rev] | 13.03 |
| 3 | B-Side Pump | Volumetric Displacement (DB) [cm3/rev] | 9.35 |
| 4 | Hydraulic Accumulator | Volume [L] | 0.7 |
| 5 | Cylinder | Dimensions [mm] | 60/30*400 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, S.; Chen, T.; Dai, F. Adaptive Backstepping Sliding Mode Control for Direct Driven Hydraulics. Proceedings 2020, 64, 1. https://doi.org/10.3390/IeCAT2020-08496
Zhang S, Chen T, Dai F. Adaptive Backstepping Sliding Mode Control for Direct Driven Hydraulics. Proceedings. 2020; 64(1):1. https://doi.org/10.3390/IeCAT2020-08496
Chicago/Turabian StyleZhang, Shuzhong, Tianyi Chen, and Fuquan Dai. 2020. "Adaptive Backstepping Sliding Mode Control for Direct Driven Hydraulics" Proceedings 64, no. 1: 1. https://doi.org/10.3390/IeCAT2020-08496
APA StyleZhang, S., Chen, T., & Dai, F. (2020). Adaptive Backstepping Sliding Mode Control for Direct Driven Hydraulics. Proceedings, 64(1), 1. https://doi.org/10.3390/IeCAT2020-08496