1. Introduction
Mobile robots are ideal tools for exploring hazardous areas without placing the lives of emergency workers at risk. In a disaster zone, such as a burning building, visibility can be poor, and the robot requires sensors other than machine vision to navigate, such as LIDAR and RADAR [
1]. In this work we have developed high-bandwidth (HBW) gas sensors to detect plumes of VOCs. These sensors are installed on a mobile robot, and used to create a hazard map of the area that the robot explores. The map is generated in real-time from the sensor outputs, and displayed to the user via an interactive screen. Locations of gas sources and a map of the gas concentration can be overlaid onto the map. HBW sensors are needed for use in mobile applications, where the speed of the sensor response must not limit the movement of the instrument.
Here we demonstrate a signal processing technique made possible through the use of our fast metal oxide (MOX) devices, based on commercial silicon on insulator (SOI) micro-hotplates. In “static” mode (i.e., fixed temperature of operation), our sensors offer good responses times (<10 s) when compared to commercial standard (~30 s) [
2]. This response time can be further reduced (better than 1 s) in “dynamic” operation, where the sensors are thermally modulated between two temperature settings. Our process also removes baseline drift, reduces power consumption and helps differentiate between different gases. We have employed low power miniature (1 × 1 mm) CMOS sensors commercially available (ams Sensors UK Ltd., Cambridge, UK). Film coatings based on SnO
2, WO
3 and NiO have been deployed in a sensor module on a mobile robot to detect hazardous or explosive gases. We demonstrate our optimized algorithms, which are executed on a microcontroller (Teensy 3.6, PJRC, Oregon, USA). These algorithms produce a user-friendly output in real-time (without further signal processing).
2. Background
A mobile robot (provided by Taurob, Vienna, Austria) shown in
Figure 1a, forms the mobile exploration platform for hazardous environments. Such equipment is vital for fire and rescue teams, where a robot can be deployed prior to human rescue workers. The robot is equipped with imaging systems and thus can be teleoperated in low-visibility conditions (e.g., smoke-filled or low-light enclosed areas) or it can autonomously navigate to a designated safe location, as required. Two gas sampling inlets are used (physically high and low positions) to enable gases that have lower or greater density than air to be sampled.
Equipment designed for use by fire fighter agencies must be able to withstand extreme temperatures for a given period of time as experienced during a typical rescue operation. The sensor module is housed in a robust enclosure, shown in
Figure 1b, designed to withstand falling debris and high temperatures. The compact design of the module also includes valves and a filter system to prevent the poisoning of the chemical sensors. It has been reported that fire-fighters can encounter room temperatures >400 °C when they are tackling a fire inside a building [
3]. The compact unit is shielded from direct contact with the extreme temperatures through use of a heat shield, which can be deployed to cover the robot (not shown). Our thermal modulation technique is based upon pulsing the MOX sensor micro-hotplates between two temperatures. Readings are taken at both temperatures and subtracted, thus removing the effect of signal drift (affected by environmental temperature).
3. Materials and Methods
The sensor module contains three MOX sensors based on coatings of SnO2, WO3 and NiO, designed to be specific for the detection the hazardous gases CO, NO2 and NH3, respectively. Both n- and p-type films are employed to enhance the sensitivity of the system to desired VOCs (results from the SnO2 sensor are shown here). In the static mode (operating with micro-hotplate temperature set to 350 °C, <75 mW power consumption), our novel HBW sensors offer faster response times and superior sensitivity compared to commercial devices. When pulsed between two temperatures (dynamic operation), the miniature sensors uniquely offer the possibility to extract data during the transition period between the temperatures. This is due to the superior rise and fall times of the hotplate (15 and 30 ms, respectively) compared to commercial devices.
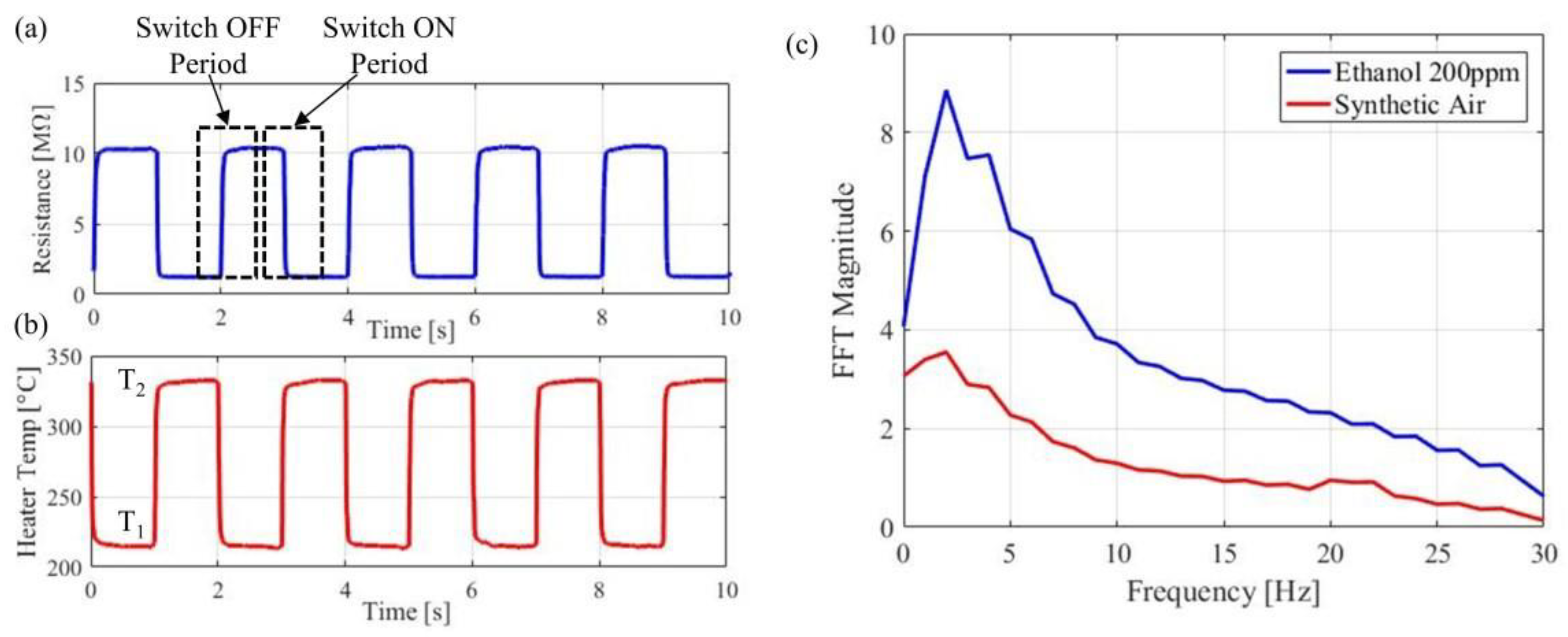
The MOX sensor is pulsed between the two temperatures with a period of 2 s (equal time at each temperature). The corresponding change in resistance of the sensor (whilst in a baseline of synthetic air) is shown in
Figure 2a. The calculated temperatures (based on the characteristics of the hotplate and base resistance) is shown in
Figure 2b. The heater is pulsed between 225 °C and 325 °C with an average power consumption of <60 mW. A 0.5 s period centred on each switching time is taken between each temperature change, as shown in
Figure 2a.
One set of data is extracted from each switching cycle. Considering the conductance of the sensing element of the device,
G, the output from the sensor can be represented via
where (1) represents the transition period increasing in temperature (switch ‘ON’ period) and (2) represents the period when the temperature is decreased (switch ‘OFF’ period). These periods are represented as exponential changes. To calculate the response of the sensor to the VOC (to eliminate the change in resistance due to heater temperature) and to remove baseline drift, the ‘OFF’ period (2) is subtracted from the ‘ON’ period (1).
An FFT of the data is then calculated, using an algorithm optimized for use on microcontroller in real-time.
Figure 2c shows the output from the transform when the sensor module is exposed to 200 ppm ethanol, conditions of 25% relative humidity (RH). In this work, the data were collected from a laboratory bench-top gas testing rig. Data were sampled at 100 Hz rate and stored on a microSD card in the Teensy microcontroller.
4. Results and Discussion
The FFT output data shown in
Figure 2c demonstrates that the response to ethanol can be represented by considering the magnitude of the FFT at a frequency of 2 Hz. The peak frequency shown in the spectrum can be used to discriminate different gases. CO was found to create a peak in the spectrum at 1 Hz. This indicates the speed of the chemical reactions occurring in the film layer differs depending on the gas present and in turn this affects the response of the sensor when a temperature shift is implemented.
The output from the microcontroller (over a USB connection for real-time plotting) is in the form of a processed measurement for each of the desired frequencies. This can directly show the exact gas present and its concentration (i.e., from the frequency and magnitude of the FFT result). Importantly, this output can directly be used to assess the hazardous nature of the gas detected (from its magnitude) and thus reduces the processing load on the host computer (i.e., for an application involving a mobile robot).
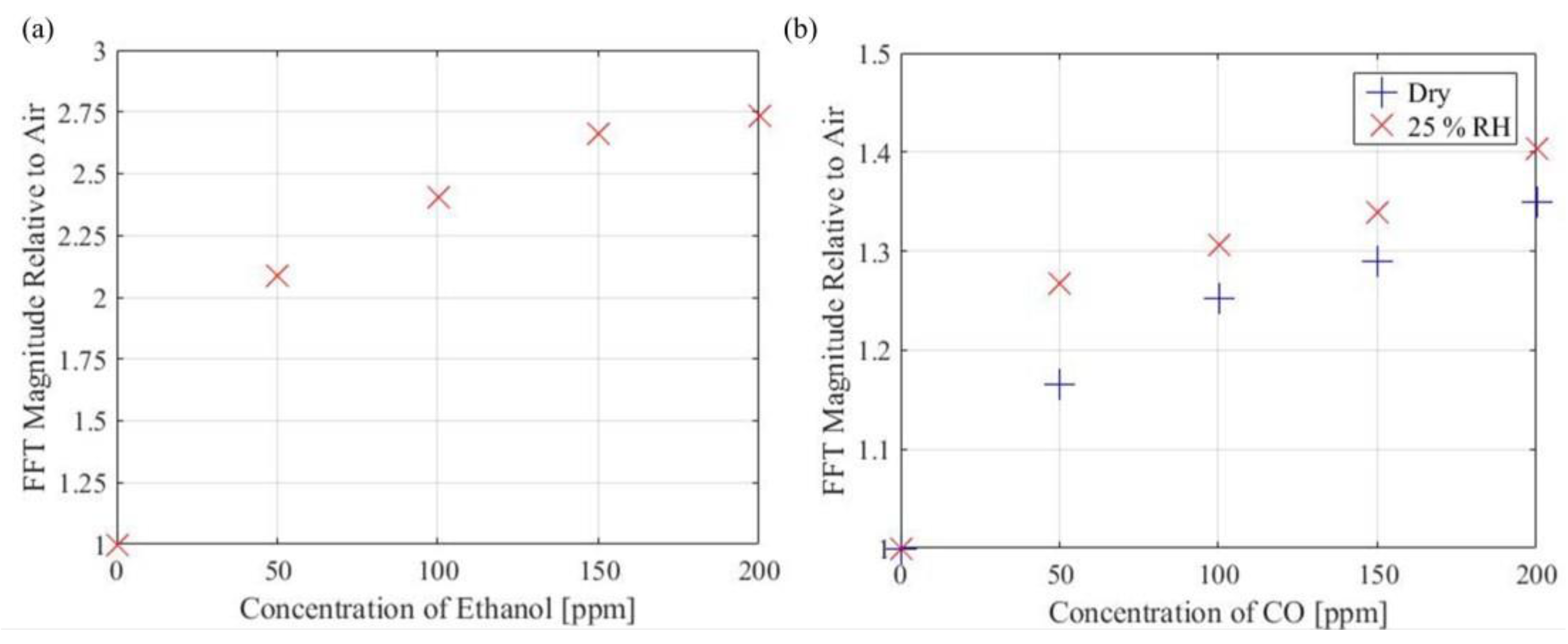
The thermal modulation system was tested with a VOC (ethanol) and toxic gas (CO) for a range 0 to 200 ppm in steps of 50 ppm.
Figure 3a,b show the output FFT response data for each gas, respectively. The sensors produced a stable output (<2% variance) during the measurements, with any baseline signal drift removed through our signal processing technique.
The SnO2 sensor produces a larger magnitude of response to the presence of ethanol compared to CO (e.g., response 2.74 greater than synthetic air in 200 ppm of ethanol, compared to 1.41 for CO). The large response at 50 ppm for each experiment (e.g., ethanol 50 ppm response twice the magnitude compared to synthetic air) demonstrates our sensor system is capable of low ppm measurements (the lower detection limit has not been explored). The effect of ambient humidity was also explored during the CO measurements. A 25% mixture of RH reduced the sensor response (average 4.8%). From preliminary experiments on the mobile robot, levels of humidity are ~28% in a simulated burning house environment. The sensors are capable of detecting low ppm plumes of VOCs, although the devices could become saturated at higher concentrations, demonstrated by the exponential trend visible on the sensor output at higher concentrations (150 and 200 ppm).
5. Conclusions
We have developed a FFT based signal processing algorithm for three temperature modulate resistive MOX sensors in a module designed for use on a mobile exploration robot. The novel technique helps remove baseline drift (important in an environment with large temperature variance) and reduces the power consumption of the sensors (>20% reduction). Furthermore, our technique maintains the fast response and HBW of the sensors. The system was tested with concentrations of ethanol and CO (0 to 200 ppm). An FFT of the raw thermally modulated sensor signal allows the frequency domain to be used for classifying the gases present and determining their concentration (e.g., CO found to produce peak at 1 Hz and ethanol at 2 Hz). The processing technique is now ready for deployment on a mobile robot. The pre-processed data reduce the computing load on the host micro-controller but enables low concentrations (<50 ppm) of VOCs to be detected in real-time.


{kind=link}
{kind=link}
{kind=link}