Tuning the Anti-Phase Mode Sensitivity to Vibrations of a MEMS Gyroscope †

 ,
, {kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
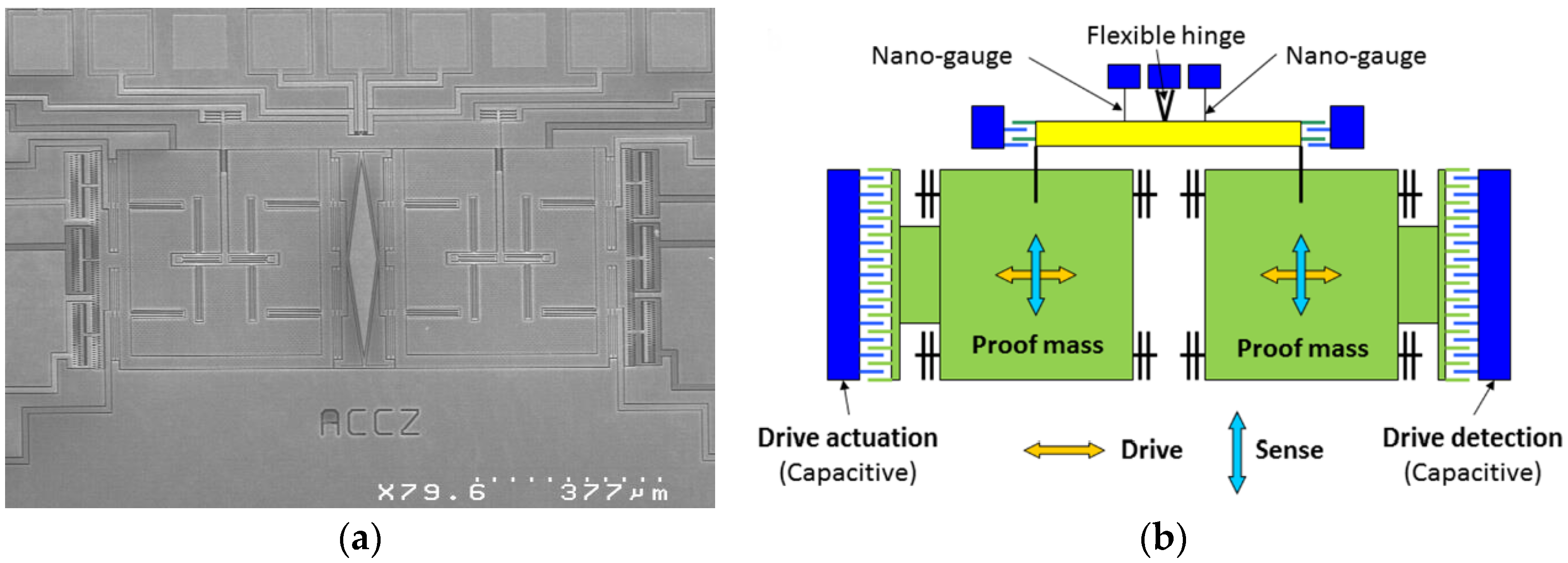
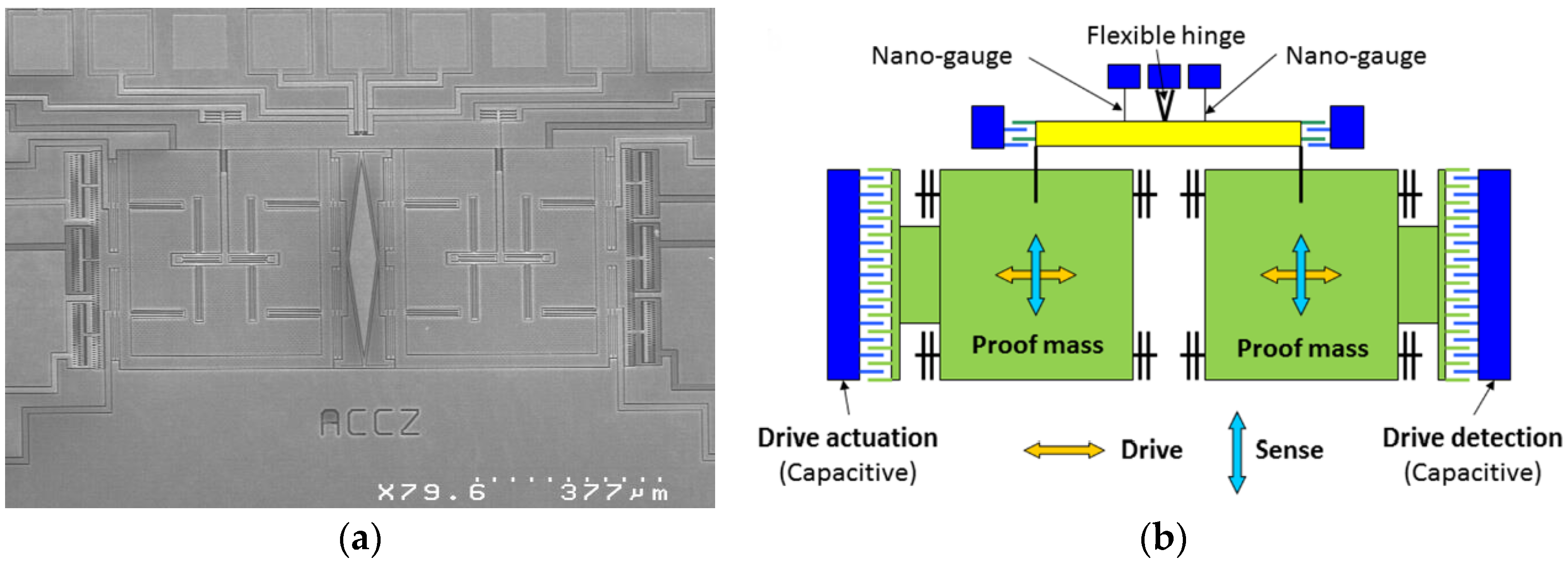
2. Device Description
3. Experimental Details
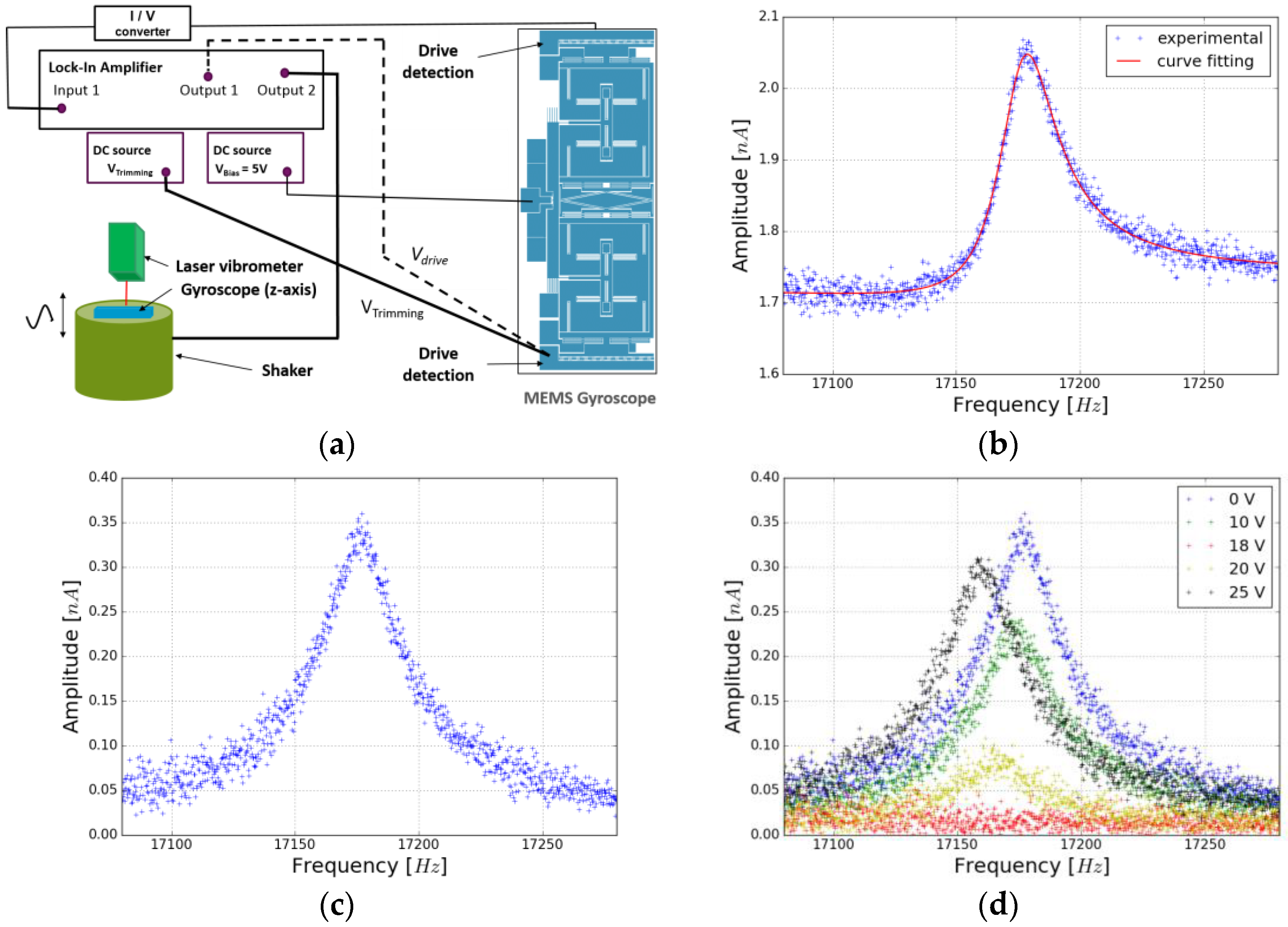
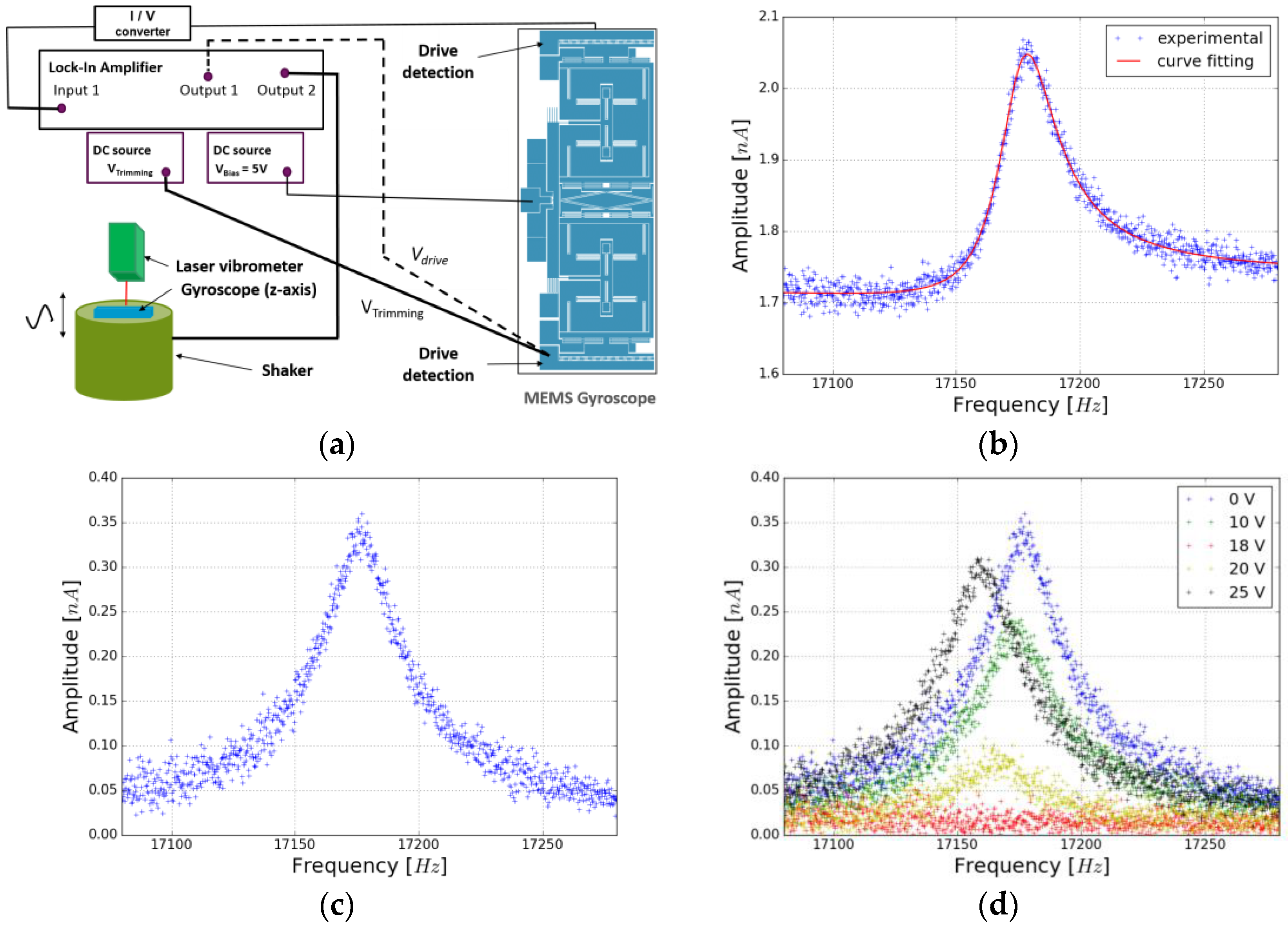
3.1. Experimental Set-Up
3.2. Curve Fitting Method
3.3. Experimental Results
4. Conclusions
Conflicts of Interest
References
- Koumela, A.; Poulain, C.; Le Goc, C.; Verdot, T.; Joet, L.; Rey, P.; Berthelot, A.; Jourdan, G. Resilience to vibration of a tuning fork MEMS gyroscope. Procedia. Eng. 2016, 168, 1725–1730. [Google Scholar] [CrossRef]
- Trusov, A.A.; Zotov, S.A.; Shkel, A.M. Electrostatic regulation of quality factor in non-ideal tuning fork MEMS. In Proceedings of the 2011 IEEE SENSORS, Limerick, Ireland, 28–31 October 2011; pp. 20–23. [Google Scholar]
- Guan, Y.; Gao, S.; Liu, H.; Jin, L.; Zhang, Y. Vibration sensitivity reduction of micromachined tuning fork gyroscopes through stiffness match method with negative electrostatic spring effect. Sensors 2016, 16. [Google Scholar] [CrossRef] [PubMed]
- Walther, A.; Savoye, M.; Jourdan, G.; Renaux, P.; Souchon, F.; Robert, P.; Blanc, C.L.; Delorme, N.; Gigan, O.; Lejuste, C. 3-Axis gyroscope with Si nanogage piezo-resistive detection. In Proceedings of the IEEE 25th International Conference on Micro Electro Mechanical Systems (MEMS), Paris, France, 29 January–2 February 2012; pp. 480–483. [Google Scholar]
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Janioud, P.; Koumela, A.; Poulain, C.; Rey, P.; Berthelot, A.; Morfouli, P.; Jourdan, G. Tuning the Anti-Phase Mode Sensitivity to Vibrations of a MEMS Gyroscope. Proceedings 2017, 1, 355. https://doi.org/10.3390/proceedings1040355
Janioud P, Koumela A, Poulain C, Rey P, Berthelot A, Morfouli P, Jourdan G. Tuning the Anti-Phase Mode Sensitivity to Vibrations of a MEMS Gyroscope. Proceedings. 2017; 1(4):355. https://doi.org/10.3390/proceedings1040355
Chicago/Turabian StyleJanioud, Pierre, Alexandra Koumela, Christophe Poulain, Patrice Rey, Audrey Berthelot, Panagiota Morfouli, and Guillaume Jourdan. 2017. "Tuning the Anti-Phase Mode Sensitivity to Vibrations of a MEMS Gyroscope" Proceedings 1, no. 4: 355. https://doi.org/10.3390/proceedings1040355
APA StyleJanioud, P., Koumela, A., Poulain, C., Rey, P., Berthelot, A., Morfouli, P., & Jourdan, G. (2017). Tuning the Anti-Phase Mode Sensitivity to Vibrations of a MEMS Gyroscope. Proceedings, 1(4), 355. https://doi.org/10.3390/proceedings1040355